5-SC1-RT 1
37
“Análisis de la Respuesta Transitoria” “Análisis de la Respuesta Transitoria”
-
Upload
gustavo-martin -
Category
Documents
-
view
241 -
download
1
description
Análisis en respuesta transitoria
Transcript of 5-SC1-RT 1

“Análisis de la Respuesta Transitoria”“Análisis de la Respuesta Transitoria”
INTRODUCCIÓN
Contando con el modelo matemático de un Contando con el modelo matemático de un sistema de control, es conveniente el análisis del desempeño del sistema (Respuesta transitoria y Respuesta en estado estable).
INTRODUCCIÓN
En el análisis y diseño de sistemas de
control, debemos tener una base de
comparación del desempeño de diversos comparación del desempeño de diversos
sistemas de control. Esta base se configura
especificando las señales de entrada y
comparando las respuestas de varios
sistemas a estas señales de entrada.
INTRODUCCIÓN
Si las entradas para un sistema de control
son funciones del tiempo que cambian en
forma gradual, una función rampa sería una forma gradual, una función rampa sería una
buena señal de prueba. Si el sistema está
sujeto a perturbaciones repentinas, una
función escalón sería la adecuada; y para un
sistema sujeto a entradas de choque, una
función impulso sería la mejor.
INTRODUCCIÓN
Función impulso
unitario
(en el tiempo)
f(t) = δ(t)
(en la frecuencia)
F(s) = 1
INTRODUCCIÓN
Función escalón
unitario
(en el tiempo)
f(t) = µ(t)
(en la frecuencia)
F(s) = 1/s
INTRODUCCIÓN
Función rampa unitaria
(en el tiempo)(en el tiempo)
f(t) = t
(en la frecuencia)
F(s) = 1/s^2

INTRODUCCIÓN
La respuesta en el tiempo de un sistema de
control consta de dos partes: la respuesta
transitoria y la respuesta en estado estable. transitoria y la respuesta en estado estable.
Por respuesta transitoria nos referimos a la
que va del estado inicial al estado final. Por
respuesta en estado estable, nos referimos a
la manera en la cual se comporta la salida
del sistema conforme t tiende a infinito.
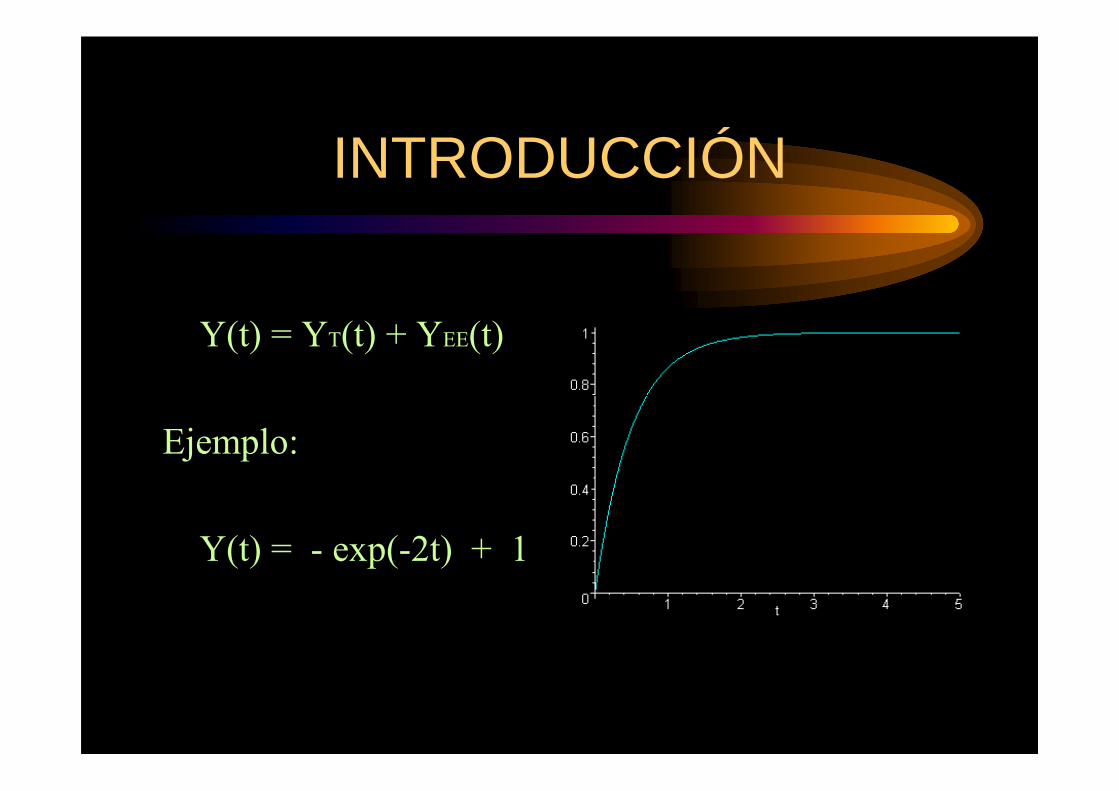
INTRODUCCIÓN
Y(t) = YT(t) + YEE(t)
Ejemplo:
Y(t) = - exp(-2t) + 1
INTRODUCCIÓN
Si la salida de un sistema de control en
estado estable no coincide exactamente con
la entrada, se dice que el sistema tiene un la entrada, se dice que el sistema tiene un
error de estado estable. Este error indica la
precisión del sistema. Al analizar un sistema
de control, debemos examinar el
comportamiento de la respuesta transitoria y
el comportamiento en estado estable.
INTRODUCCIÓN
Se define el orden de un sistema cuya
función de transferencia es
F(s)=b(s)/a(s)
como el grado del polinomio del
denominador a(s).
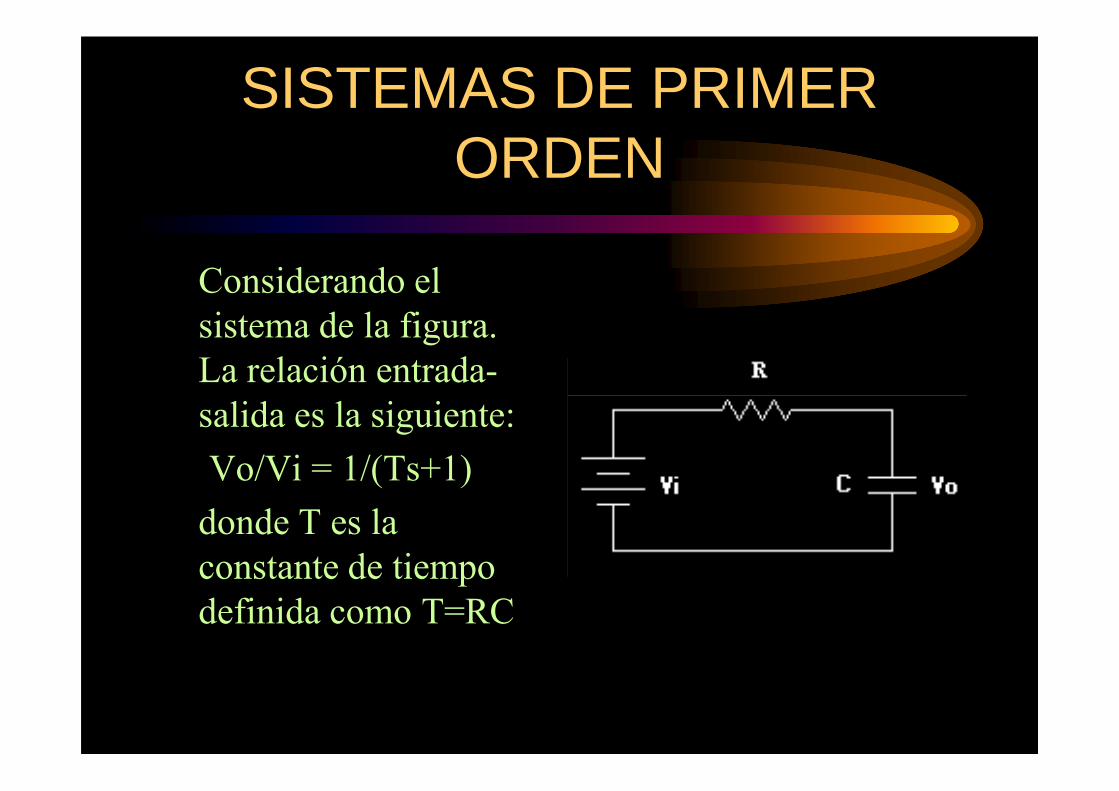
SISTEMAS DE PRIMER ORDEN
Considerando el
sistema de la figura.
La relación entrada-
salida es la siguiente:salida es la siguiente:
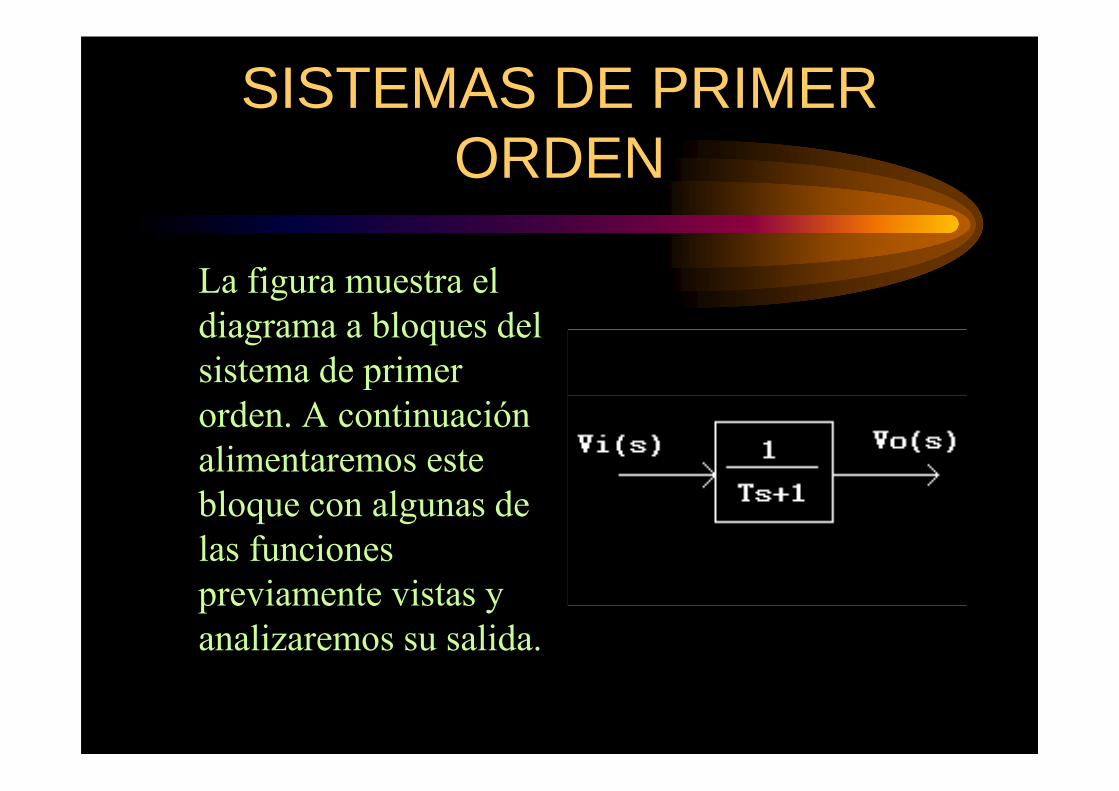
Vo/Vi = 1/(Ts+1)
donde T es la
constante de tiempo
definida como T=RC
SISTEMAS DE PRIMER ORDEN
La figura muestra el
diagrama a bloques del
sistema de primer
orden. A continuación orden. A continuación
alimentaremos este
bloque con algunas de
las funciones
previamente vistas y
analizaremos su salida.
SISTEMAS DE PRIMER ORDEN
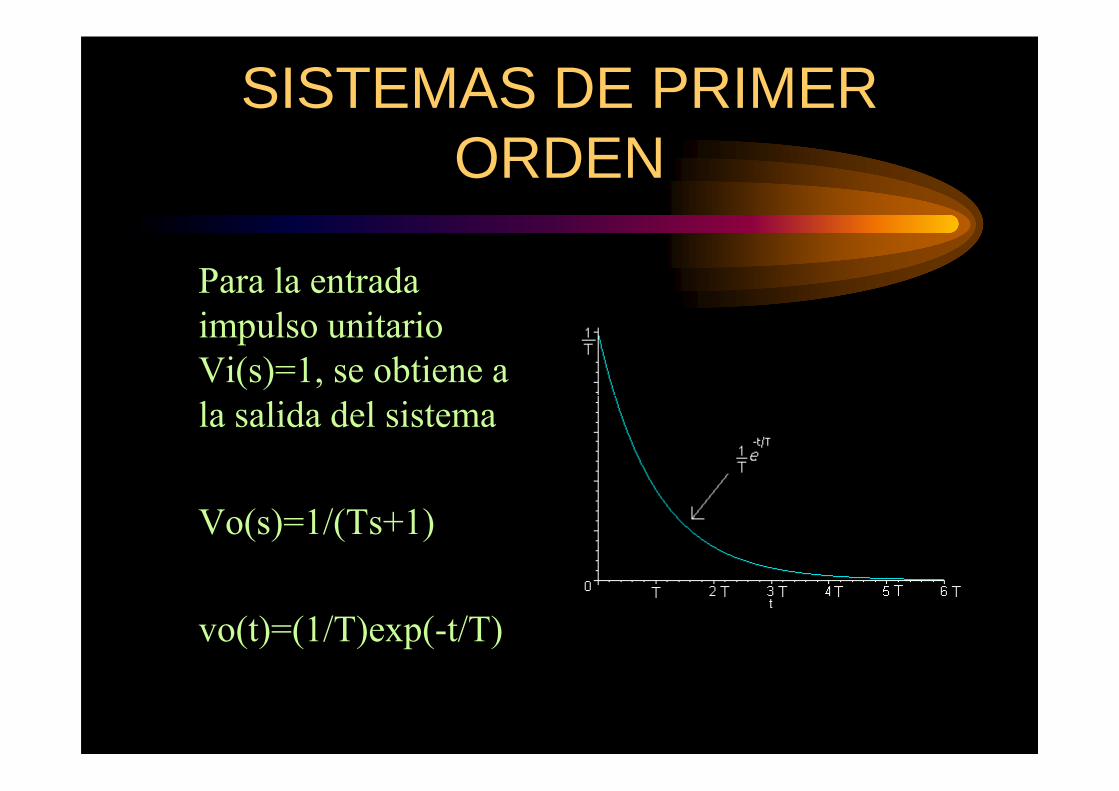
Para la entrada
impulso unitario
Vi(s)=1, se obtiene a
la salida del sistemala salida del sistema
Vo(s)=1/(Ts+1)
vo(t)=(1/T)exp(-t/T)
SISTEMAS DE PRIMER ORDEN
En una constante de tiempo, la curva de
respuesta exponencial ha ido de 0 a 63.2%
del valor final. En dos constantes de tiempo, del valor final. En dos constantes de tiempo,
la respuesta alcanza el 86.5% del valor
final. En t=3T, 4T y 5T, la respuesta alcanza
95, 98.2 y 99.3%, respectivamente del valor
final. Para t≥4T, la respuesta permanece
dentro del valor final.
SISTEMAS DE PRIMER ORDEN
De la ecuación vo(t)=(1/T)exp(-t/T), se
observa que el estado estable se alcanza
matemáticamente sólo después de un matemáticamente sólo después de un
tiempo infinito. Sin embargo, en la práctica,
una estimación del tiempo de respuesta para
alcanzar el valor final es de cuatro o cinco
constantes de tiempo.
SISTEMAS DE PRIMER ORDEN
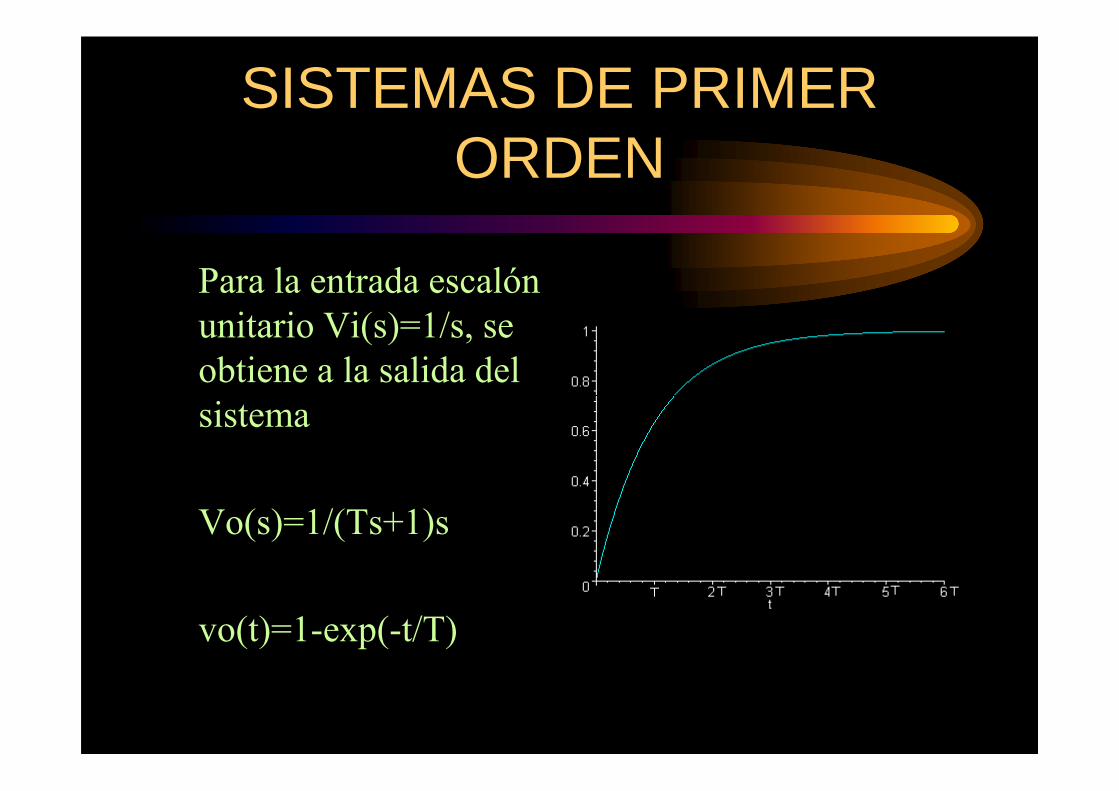
Para la entrada escalón
unitario Vi(s)=1/s, se
obtiene a la salida del
sistema
∞→t
sistema
Vo(s)=1/(Ts+1)s
vo(t)=1-exp(-t/T)
SISTEMAS DE PRIMER ORDEN
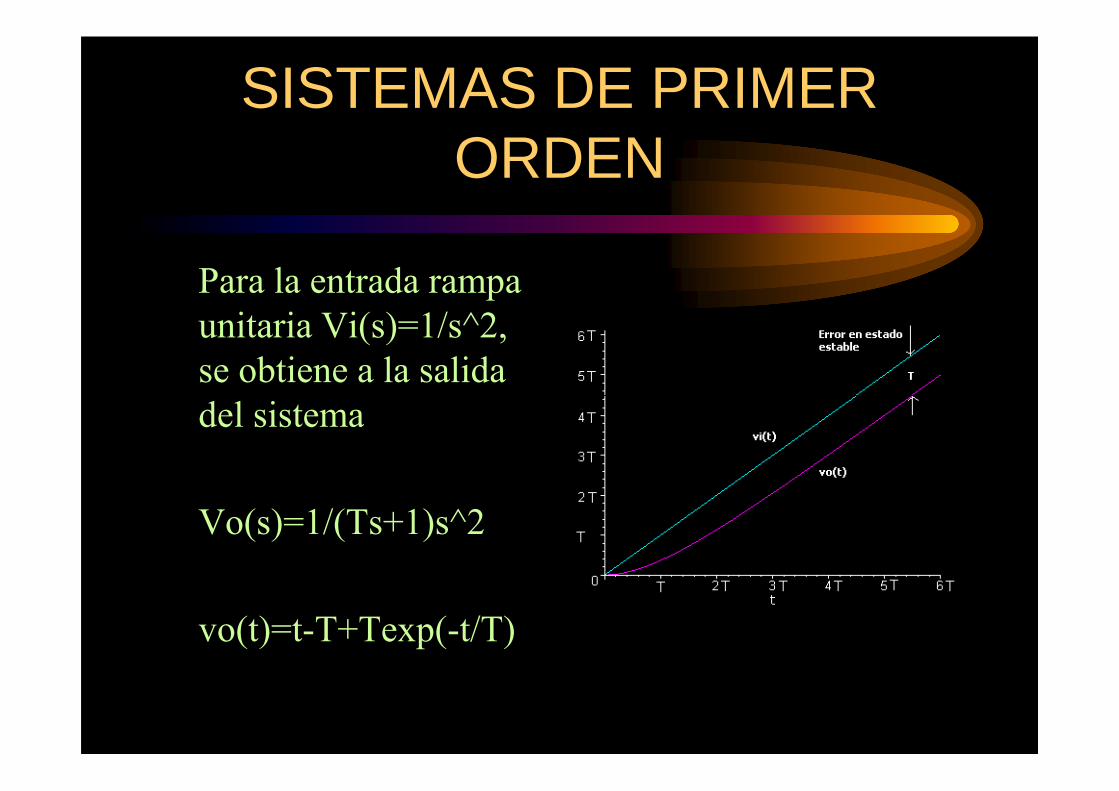
Para la entrada rampa
unitaria Vi(s)=1/s^2,
se obtiene a la salida
del sistemadel sistema
Vo(s)=1/(Ts+1)s^2
vo(t)=t-T+Texp(-t/T)
SISTEMAS DE PRIMER ORDEN
Observamos que la salida del sistema
excitado con la rampa presenta un error de
estado estable.estado estable.
e(t)=vi(t)-vo(t)
e(t)=T(1-exp(-t/T))
Conforme t→∞ la señal de error tiende a T.
Y mientras T sea mas pequeño, también lo
será el error.
SISTEMAS DE PRIMER ORDEN
En el análisis anterior, se demostró que para
la entrada rampa unitaria, la salida es
vo(t) = t - T + Texp(-t/T)vo(t) = t - T + Texp(-t/T)
Para la entrada escalón unitario, que es la
derivada de la entrada rampa unitaria, la
salida es
vo(t) = 1 - exp(-t/T)
SISTEMAS DE PRIMER ORDEN
Por último, para la entrada impulso unitario,
que es la derivada de la entrada escalón
unitario, la salida esunitario, la salida es
vo(t)=(1/T)exp(-t/T)
Claramente podemos deducir que la
respuesta a la derivada de una señal de
entrada se obtiene diferenciando la
respuesta del sistema para la señal original.
SISTEMAS DE PRIMER ORDEN
Esta es una propiedad de los sistemas
lineales e invariantes con el tiempo. Los
sistemas lineales y variantes con el tiempo y sistemas lineales y variantes con el tiempo y
los no lineales no poseen esta propiedad.
SISTEMAS DE SEGUNDO
ORDEN
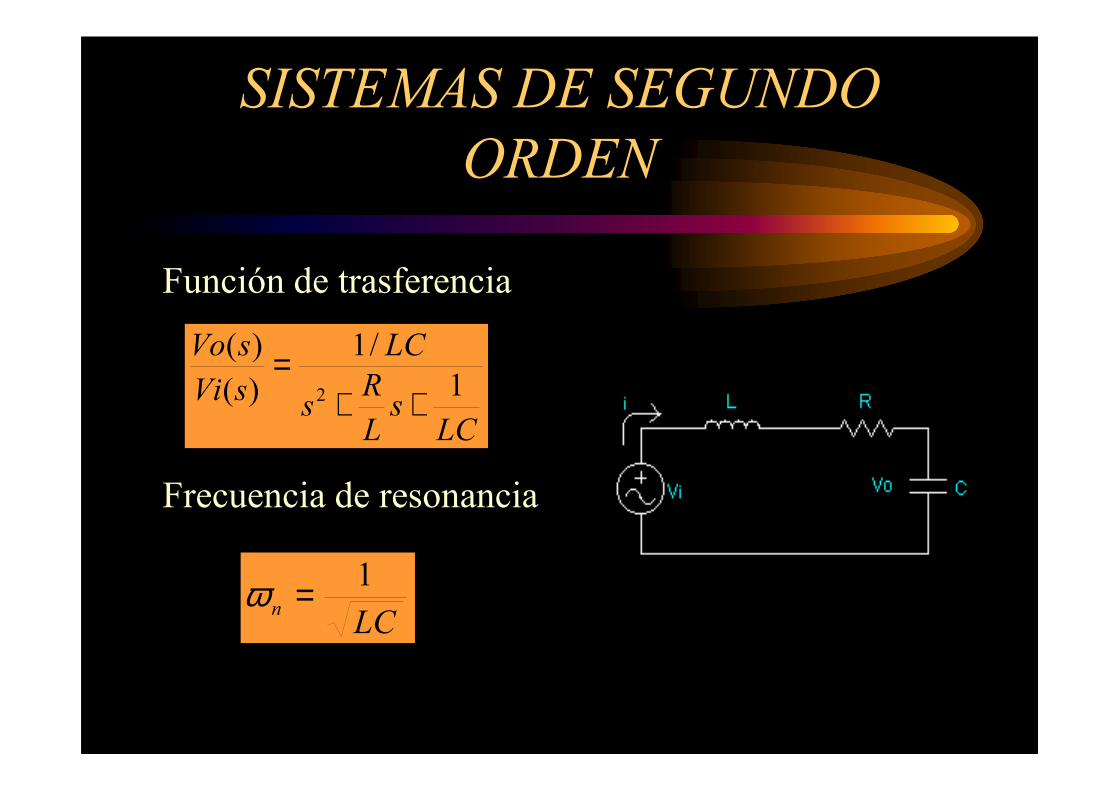
Función de trasferencia
sR
s
LC
sVi
sVo
1
/1
)(
)(
2 ++=
Frecuencia de resonancia
LCs
L
Rs
sVi 1)( 2 ++
LCn
1=ω
SISTEMAS DE SEGUNDO
ORDEN
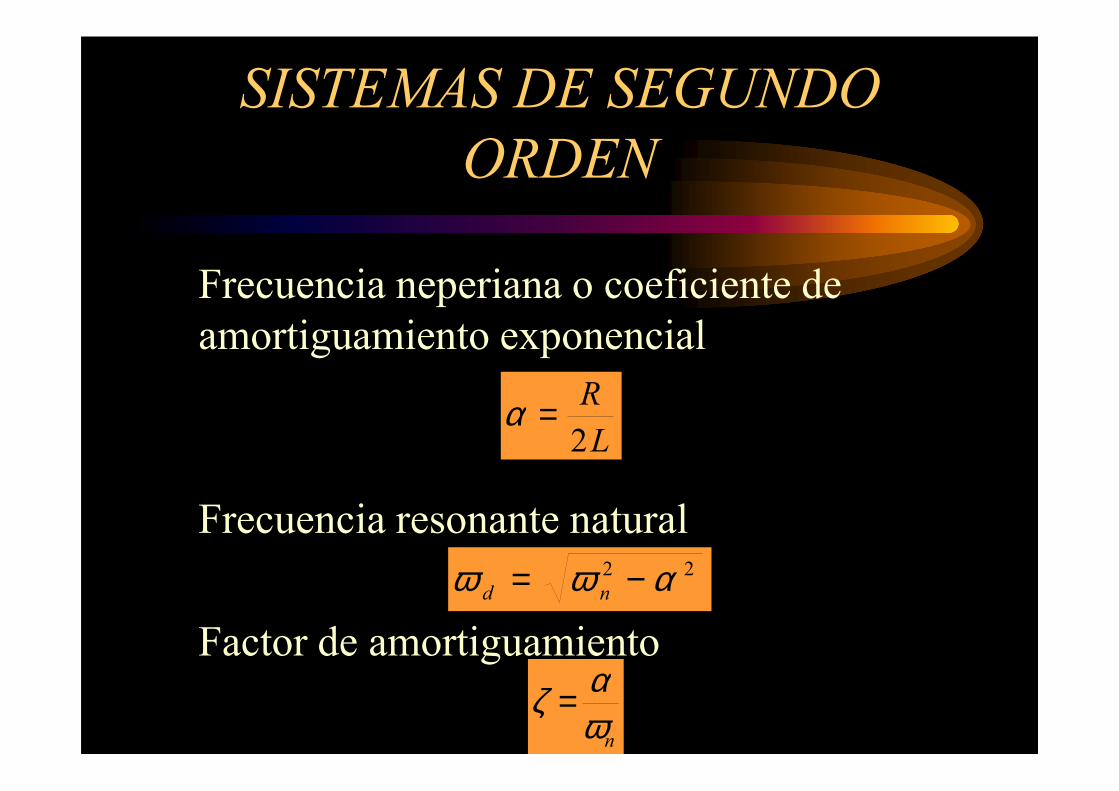
Frecuencia neperiana o coeficiente de
amortiguamiento exponencial
R=α
Frecuencia resonante natural
Factor de amortiguamiento
L
R
2=α
22 αωω −= nd
nωαζ =
SISTEMAS DE SEGUNDO
ORDEN
Sustituyendo
22
2
2)(
)( n
sssVi
sVo
ωζωω
++=
Igualando el denominador a cero,
obtenemos sus raíces
22 2)( nnsssVi ωζω ++
1
1
22
21
−−−=
−+−=
ζωζω
ζωζω
nn
nn
s
s
SISTEMAS DE SEGUNDO
ORDEN
Expresando las raíces en la F de T
( )( )11)(
)(22
2
−−+−++=
ζωζωζωζωω
nnnn
n
sssVi
sVo
( )( )11)( −−+−++ ζωζωζωζω nnnn sssVi
222
22
nnd
n
nd
ωζωωωαζ
αωω
−=⇒=
−=
dn
nd
nd
j
j
ωζω
ζωω
ζωω
−=−
−=
−=
1
1
1
2
2
2
( )( )dndn
n
jsjssVi
sVo
ωζωωζωω
++−+=
2
)(
)(
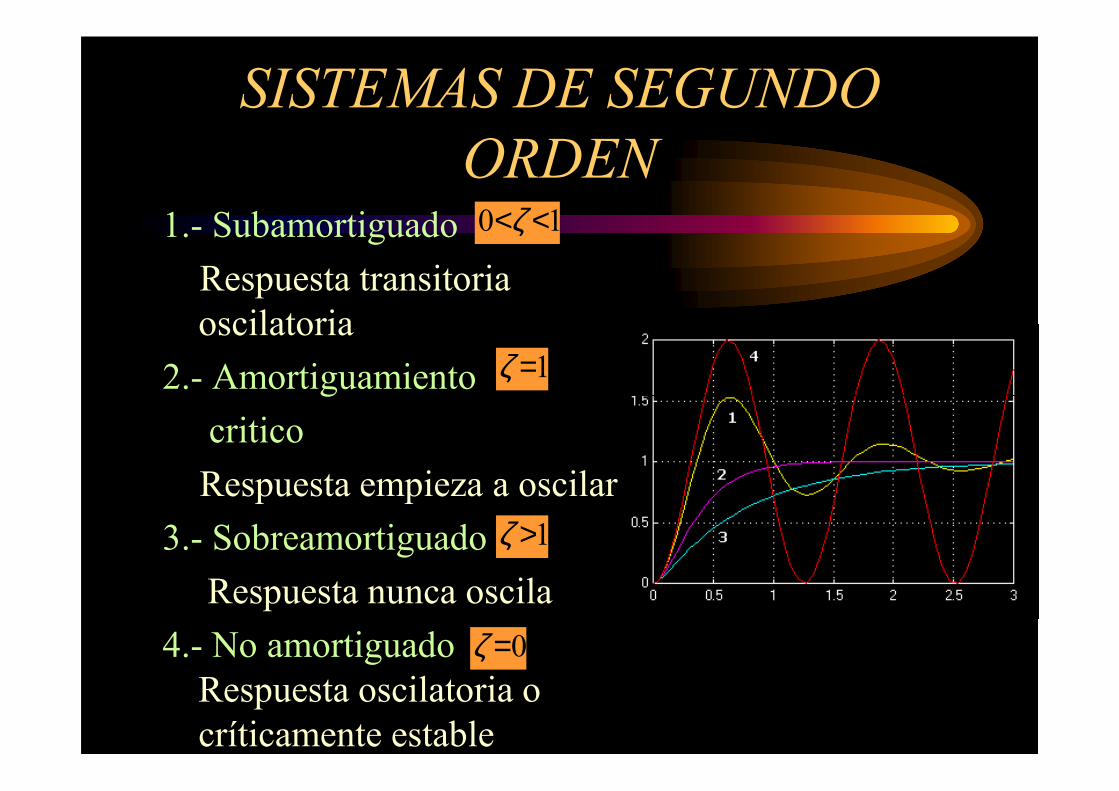
SISTEMAS DE SEGUNDO
ORDEN1.- Subamortiguado
Respuesta transitoria
oscilatoria
2.- Amortiguamiento
10 <<ζ
1=ζ2.- Amortiguamiento
critico
Respuesta empieza a oscilar
3.- Sobreamortiguado
Respuesta nunca oscila
4.- No amortiguado
Respuesta oscilatoria o
críticamente estable
1>ζ
0=ζ
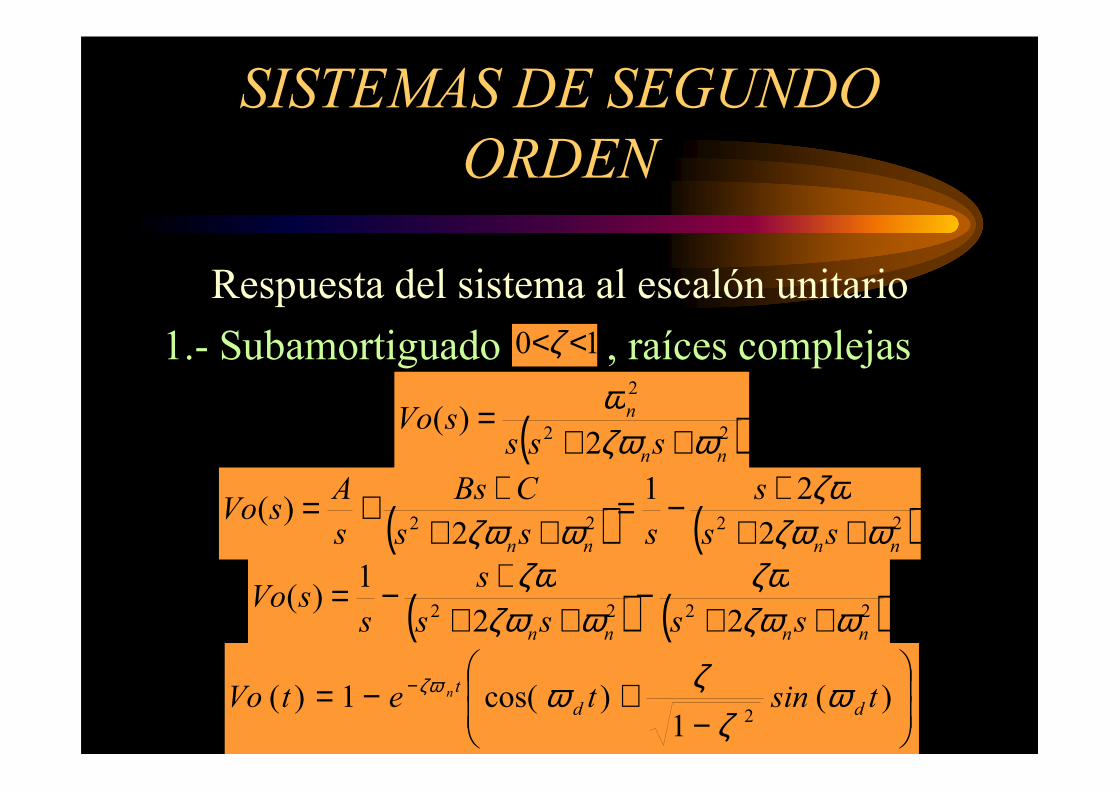
SISTEMAS DE SEGUNDO
ORDEN
Respuesta del sistema al escalón unitario
1.- Subamortiguado , raíces complejas10 <<ζ2ω
( )22
2
2)(
nn
n
ssssVo
ωζωω
++=
( ) ( )2222 2
21
2)(
nnnn ss
s
sss
CBs
s
AsVo
ωζωζω
ωζω +++−=
++++=
( ) ( )2222 22
1)(
nnnn ssss
s
ssVo
ωζωζω
ωζωζω
++−
+++−=
−+−= −
)(1
)cos(1)(2
tsintetVo dd
tn ωζ
ζωζω
SISTEMAS DE SEGUNDO
ORDEN
La señal de error se define como
−+=−= −
)(1
)cos()()()(2
tsintetVotVite dd
tn ωζ
ζωζω
Esta señal de error presenta una oscilación
senoidal amortiguada, y en estado estable
no existe error.
−1 2ζ
SISTEMAS DE SEGUNDO
ORDEN
Si el factor de amortiguamiento es cero, la
respuesta se vuelve no amortiguada y las
oscilaciones continúan indefinidamente.oscilaciones continúan indefinidamente.
4.- No amortiguado , raíces imaginarias 0=ζ
)cos(1)( ttVo dω−=
)cos()()()( ttVotVite dω=−=
SISTEMAS DE SEGUNDO
ORDEN
2.- Amortiguamiento critico , raíces reales e
iguales, en donde
1=ζ
0=dω
Este resultado se obtiene suponiendo que
se aproxima a la unidad en la ecuación del
caso (1), y usando el límite siguiente
t
n
t nn teetVoωω ω −− −−=1)(
ζ
ttsinlimtsinlim
nnd ω
ζζω
ζζω
ζ=
−−
→=
−→ 2
2
2 1
)1(
11
)(
1
SISTEMAS DE SEGUNDO
ORDEN
3.- Sobreamortiguado , raíces reales
negativas y diferentes
1>ζ
( )( )2ω
( )( )11)(
22
2
−−+−++=
ζωζωζωζωω
nnnn
n
ssssVo
−
−+=
−−
212
21
121)(
s
e
s
etVo
tsts
n
ζω
SISTEMAS DE SEGUNDO
ORDEN
Especificaciones de la respuesta transitoria
Tiempo de retardo (Td).- Es el tiempo que
tarda la respuesta del sistema en alcanzar tarda la respuesta del sistema en alcanzar
por primera vez la mitad del valor final.
Tiempo de crecimiento (Tr).- Es el tiempo
requerido para que la respuesta crezca del 0
al 100% de su valor final o del 10 al 90%.
SISTEMAS DE SEGUNDO
ORDEN
Tiempo de pico (Tp).- Es el tiempo en el
cual la respuesta del sistema alcanza el
primer pico del sobreimpulso.primer pico del sobreimpulso.
Máximo sobreimpulso (Mp).- Es el valor
pico máximo de la respuesta medido desde
la unidad.
SISTEMAS DE SEGUNDO
ORDEN
Máximo sobreimpulso porcentual.-
%100)(
)()(
∞∞−
C
CTpc
Tiempo de establecimiento (Ts).- Es el
tiempo requerido por la curva de respuesta
para alcanzar y mantenerse dentro de
determinado rango alrededor del valor final
especificando en porcentaje absoluto del
valor final. Se usa generalmente el 5% o 2%
)(∞C

SISTEMAS DE SEGUNDO
ORDEN
SISTEMAS DE SEGUNDO
ORDEN
Para un criterio del
2%
ζωωβ
ωβπ −
=−= 1; tanTr d
n
Tsζω4=
Para un criterio del
5%
πζ
ζ
ωπ
ζωω
−−
=
=
21eMp
Tpd
ndnζω
n
Tsζω3=