8º básico 2016 - sgcciencias.files.wordpress.com · 8º básico 2016 EDUCACIÓN TECNOLÓGICA...
10
Saint Gaspar College MISIONEROS DE LA PRECIOSA SANGRE Formando Personas Íntegras Departamento de Ciencias y Tecnología Profesor Gonzalo Herrera 8º básico 2016 EDUCACIÓN TECNOLÓGICA Objetivos: Entender el concepto de mecanismo y su evolución en la historia. Reconocer mecanismos básicos en distintos objetos tecnológicos. Comprender la función que cumplen. Nombre del alumno/a: ____________________________________ __________ Curso: 8º _________ Referencias Averbuj, E., Barón, M., & Ulloque, G. (2010). Hacé Click - Tecnología 2. Comunicarte. Averbuj, E., Cohan, A., & Martínez, S. (s.f.). Tecnología I. Santillana Polimodal. Cejarosu. (2005). MecanESO. Obtenido de http://concurso.cnice.mec.es/ Mautino, J. (s.f.). Tecnología 8. Stella. Las máquinas, según la tecnología que emplean, son mecánicas o electrónicas, aunque la gran mayoría de ellas son mezcladas. Los mecanismos nos permiten la transmisión de movimientos y fuerzas, y los circuitos nos permiten generar, transportar o modificar señales eléctricas. UNIDAD 1: MECANISMOS
-
Upload
truonghanh -
Category
Documents
-
view
224 -
download
1
Transcript of 8º básico 2016 - sgcciencias.files.wordpress.com · 8º básico 2016 EDUCACIÓN TECNOLÓGICA...

Saint Gaspar College MISIONEROS DE LA PRECIOSA SANGRE
Formando Personas Íntegras
Departamento de Ciencias y Tecnología Profesor Gonzalo Herrera
8º básico 2016
EDUCACIÓN TECNOLÓGICA
Objetivos: Entender el concepto de mecanismo y su evolución en la historia.
Reconocer mecanismos básicos en distintos objetos tecnológicos. Comprender la función que cumplen.
Nombre del alumno/a:
____________________________________ __________
Curso: 8º _________
Referencias Averbuj, E., Barón, M., & Ulloque, G. (2010). Hacé Click - Tecnología 2. Comunicarte. Averbuj, E., Cohan, A., & Martínez, S. (s.f.). Tecnología I. Santillana Polimodal. Cejarosu. (2005). MecanESO. Obtenido de http://concurso.cnice.mec.es/ Mautino, J. (s.f.). Tecnología 8. Stella.
Las máquinas, según la tecnología que emplean, son mecánicas o electrónicas, aunque la gran
mayoría de ellas son mezcladas. Los mecanismos nos permiten la
transmisión de movimientos y fuerzas, y los circuitos nos
permiten generar, transportar o modificar señales eléctricas.
UN
IDA
D 1
: M
EC
AN
ISM
OS
2
Recorriendo un poco la historia…
El ser humano desde sus inicios ha usado materiales que la naturaleza le proporciona para mejorar su calidad de vida. En un comienzo el hombre busco ramas, huesos, piedras, pieles que le permitieron hacer objetos para abrigarse, cazar, protegerse y para construir herramientas: la piedra para golpear, la estaca para construir un cerco para sus animales, la catapulta para defenderse frente al ataque de otros, las rampas para facilitar el trabajo y construir grandes y majestuosas edificaciones; más adelante en el transcurso del tiempo, se construyo la máquina a vapor, protagonista de la revolución industrial del siglo XVIII y XIX, capaz de transformar el calor en energía mecánica por medio del vapor a presión .
Con el paso del tiempo, se producen cambios en lo económico y social y la relación que existía entre ser humano y la naturaleza se transforma en una acción manipuladora, que busca dominar el entorno para sacar mayor provecho de él.
Al comenzar siglo XXI, entramos en la una era altamente tecnificada, donde los computadores junto con otras tecnologías, son protagonistas de una gran revolución.
No debemos olvidarnos de anteriores revoluciones, como la revolución industrial, que gracias a la aparición de la mecánica, los motores y nuevos materiales supuso un gran progreso en la sociedad.
… llegamos a las máquinas…
A lo largo de la historia el concepto de máquina se fue construyendo a medida que se fueron empleando y transformando los distintos medios con los que contaba el ser humano.
Los seres humanos desde hace miles de años hemos inventado diversos elementos o piezas para modificar la dirección, el sentido o la velocidad de un movimiento.
Franz Reuleaux (1829 – 1905) ingeniero mecánico alemán, definió las máquinas
como “una combinación de cuerpos sólidos, dispuestos de modo que encaucen
las fuerzas mecánicas de la naturaleza para realizar un trabajo como resultado de
ciertos movimientos determinantes”, “Una máquina debe poder transformar los
factores del trabajo mecánico: fuerza y espacio”
Por lo tanto, podemos definir una máquina como un conjunto de aparatos combinados (piezas o elementos móviles y fijos) para recibir cierta forma de energía y transformarla en otra más adecuada, o para producir un efecto determinado.
Los mecanismos los definimos como piezas móviles que se apoyan en soportes mediante articulaciones y ejes, que mediante la acción de una fuerza transmiten, modifican o controlan un movimiento.
MECANISMOS
Sistemas Mecánicos: Son sistemas que funcionan gracias a la
energía mecánica.
Los sistemas mecánicos poseen piezas que se mueven y se construyen con el objetivo de asegurar que la cantidad de fuerza usada sea necesaria para realizar el movimiento requerido y en el lugar que sea necesario. Hay tres tipos de sistemas mecánicos:
1. Sistemas que acumulan energía, como muelles, elásticos y resortes.
2. Sistemas que transmiten el movimiento, como ejes, las ruedas, los engranajes, las correas y las cadenas
3. Sistemas que transforman el movimiento, como las palancas, las poleas, los tornillos y las manivelas.
3
Partes de una máquina: De forma sencilla, se puede decir que una máquina está formada por 3 elementos:
1. Elemento motriz: dispositivo que introduce la fuerza o el movimiento en la máquina (Ej. Esfuerzo muscular de un ciclista).
2. Mecanismo: dispositivo que traslada el movimiento del elemento motriz al elemento receptor (Ej. Cadena)
3. Elemento conducido o receptor: recibe el movimiento o la fuerza para realizar la función de la máquina (Ej. Las ruedas).
En las máquinas se emplean 2 tipos básicos de movimientos, obteniéndose el resto mediante una combinación de ellos:
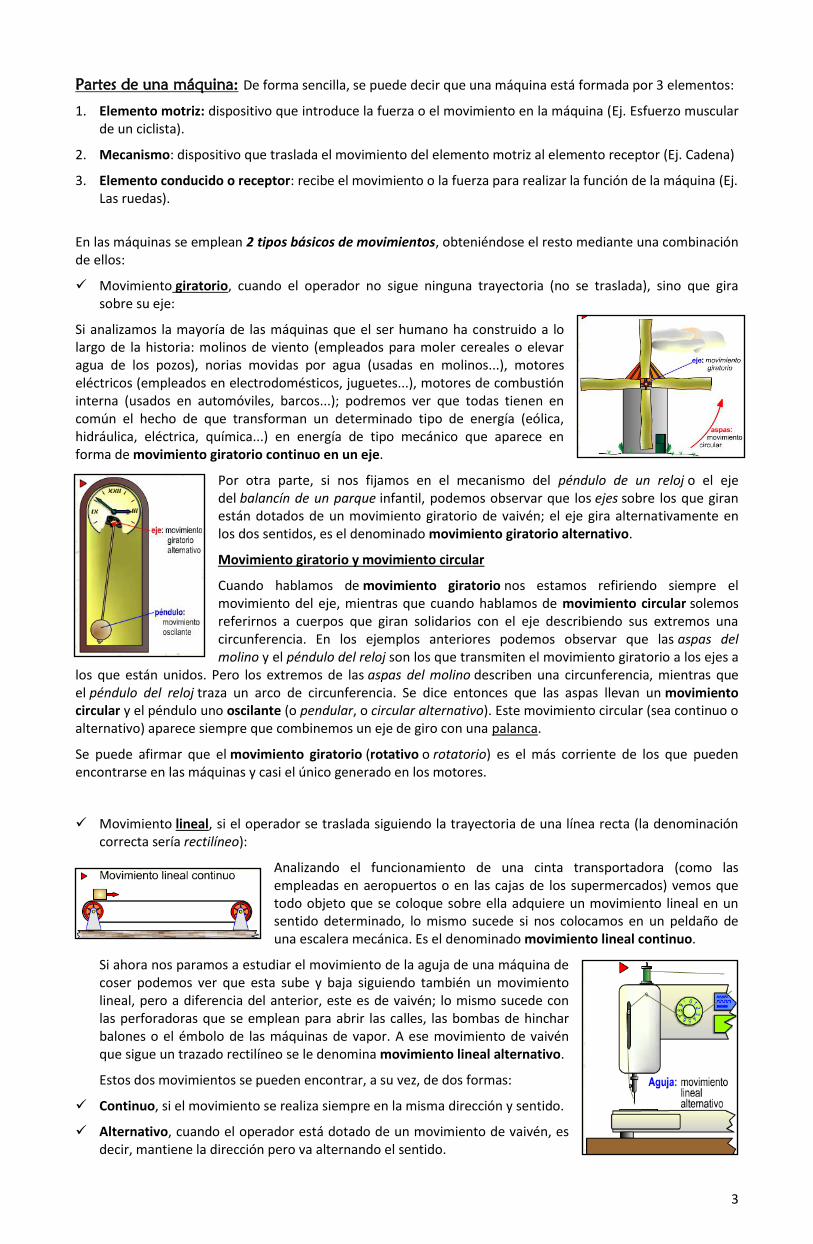
Movimiento giratorio, cuando el operador no sigue ninguna trayectoria (no se traslada), sino que gira sobre su eje:
Si analizamos la mayoría de las máquinas que el ser humano ha construido a lo largo de la historia: molinos de viento (empleados para moler cereales o elevar agua de los pozos), norias movidas por agua (usadas en molinos...), motores eléctricos (empleados en electrodomésticos, juguetes...), motores de combustión interna (usados en automóviles, barcos...); podremos ver que todas tienen en común el hecho de que transforman un determinado tipo de energía (eólica, hidráulica, eléctrica, química...) en energía de tipo mecánico que aparece en forma de movimiento giratorio continuo en un eje.
Por otra parte, si nos fijamos en el mecanismo del péndulo de un reloj o el eje del balancín de un parque infantil, podemos observar que los ejes sobre los que giran están dotados de un movimiento giratorio de vaivén; el eje gira alternativamente en los dos sentidos, es el denominado movimiento giratorio alternativo.
Movimiento giratorio y movimiento circular
Cuando hablamos de movimiento giratorio nos estamos refiriendo siempre el movimiento del eje, mientras que cuando hablamos de movimiento circular solemos referirnos a cuerpos que giran solidarios con el eje describiendo sus extremos una circunferencia. En los ejemplos anteriores podemos observar que las aspas del molino y el péndulo del reloj son los que transmiten el movimiento giratorio a los ejes a
los que están unidos. Pero los extremos de las aspas del molino describen una circunferencia, mientras que el péndulo del reloj traza un arco de circunferencia. Se dice entonces que las aspas llevan un movimiento circular y el péndulo uno oscilante (o pendular, o circular alternativo). Este movimiento circular (sea continuo o alternativo) aparece siempre que combinemos un eje de giro con una palanca.
Se puede afirmar que el movimiento giratorio (rotativo o rotatorio) es el más corriente de los que pueden encontrarse en las máquinas y casi el único generado en los motores.
Movimiento lineal, si el operador se traslada siguiendo la trayectoria de una línea recta (la denominación correcta sería rectilíneo):
Analizando el funcionamiento de una cinta transportadora (como las empleadas en aeropuertos o en las cajas de los supermercados) vemos que todo objeto que se coloque sobre ella adquiere un movimiento lineal en un sentido determinado, lo mismo sucede si nos colocamos en un peldaño de una escalera mecánica. Es el denominado movimiento lineal continuo.
Si ahora nos paramos a estudiar el movimiento de la aguja de una máquina de coser podemos ver que esta sube y baja siguiendo también un movimiento lineal, pero a diferencia del anterior, este es de vaivén; lo mismo sucede con las perforadoras que se emplean para abrir las calles, las bombas de hinchar balones o el émbolo de las máquinas de vapor. A ese movimiento de vaivén que sigue un trazado rectilíneo se le denomina movimiento lineal alternativo.
Estos dos movimientos se pueden encontrar, a su vez, de dos formas:
Continuo, si el movimiento se realiza siempre en la misma dirección y sentido.
Alternativo, cuando el operador está dotado de un movimiento de vaivén, es decir, mantiene la dirección pero va alternando el sentido.
4
TIPOS DE MECANISMOS
Mecanismo: Son piezas móviles que se apoyan en soportes mediante articulaciones y ejes, que mediante la acción de una fuerza transmiten, modifican o controlan un movimiento, permiten: Regular el movimiento variando la velocidad o la dirección Cambiar el tipo de movimiento, por ejemplo de movimiento circular a movimiento
lineal continuado o de vaivén.
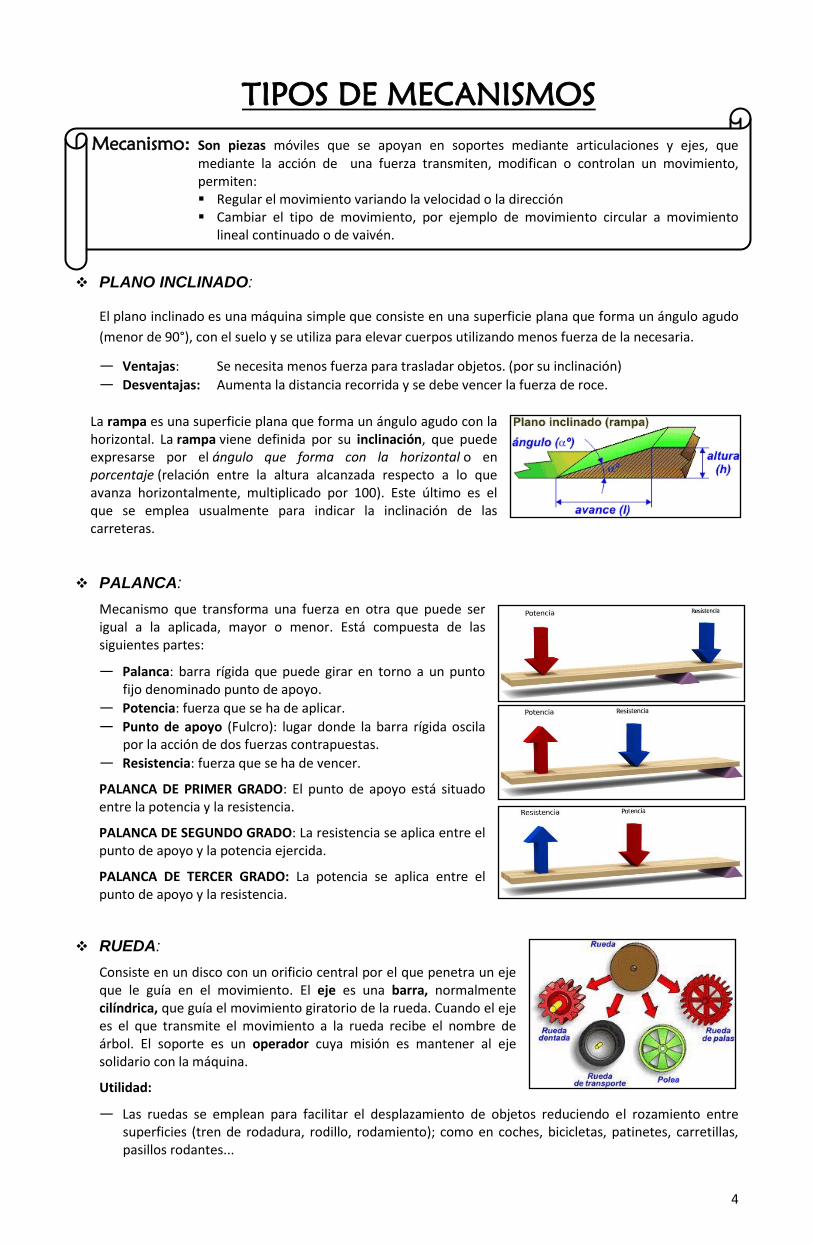
PLANO INCLINADO:
El plano inclinado es una máquina simple que consiste en una superficie plana que forma un ángulo agudo
(menor de 90°), con el suelo y se utiliza para elevar cuerpos utilizando menos fuerza de la necesaria.
— Ventajas: Se necesita menos fuerza para trasladar objetos. (por su inclinación)
— Desventajas: Aumenta la distancia recorrida y se debe vencer la fuerza de roce.
La rampa es una superficie plana que forma un ángulo agudo con la horizontal. La rampa viene definida por su inclinación, que puede expresarse por el ángulo que forma con la horizontal o en porcentaje (relación entre la altura alcanzada respecto a lo que avanza horizontalmente, multiplicado por 100). Este último es el que se emplea usualmente para indicar la inclinación de las carreteras.
PALANCA:
Mecanismo que transforma una fuerza en otra que puede ser igual a la aplicada, mayor o menor. Está compuesta de las siguientes partes:
— Palanca: barra rígida que puede girar en torno a un punto fijo denominado punto de apoyo.
— Potencia: fuerza que se ha de aplicar.
— Punto de apoyo (Fulcro): lugar donde la barra rígida oscila por la acción de dos fuerzas contrapuestas.
— Resistencia: fuerza que se ha de vencer.
PALANCA DE PRIMER GRADO: El punto de apoyo está situado entre la potencia y la resistencia.
PALANCA DE SEGUNDO GRADO: La resistencia se aplica entre el punto de apoyo y la potencia ejercida.
PALANCA DE TERCER GRADO: La potencia se aplica entre el punto de apoyo y la resistencia.
RUEDA:
Consiste en un disco con un orificio central por el que penetra un eje que le guía en el movimiento. El eje es una barra, normalmente cilíndrica, que guía el movimiento giratorio de la rueda. Cuando el eje es el que transmite el movimiento a la rueda recibe el nombre de árbol. El soporte es un operador cuya misión es mantener al eje solidario con la máquina.
Utilidad:
— Las ruedas se emplean para facilitar el desplazamiento de objetos reduciendo el rozamiento entre superficies (tren de rodadura, rodillo, rodamiento); como en coches, bicicletas, patinetes, carretillas, pasillos rodantes...
5
— Obtener un movimiento rotativo en un eje a partir del movimiento del agua (rueda de palas, noria, turbina o rodete); como en contadores de agua, molinos de agua, norias de regadío...
— Transmitir un movimiento giratorio de un eje a otro (polea, rueda dentada o piñón); como en lavadoras, neveras, bicicletas, motos, motores de automóvil...
— Reducir el esfuerzo necesario para elevar una masa (Polea de cable, polea móvil, polipasto...); como en pozos de agua, grúas, ascensores...
— Facilitar la obtención de movimientos giratorios o la conversión de este en otros (excéntrica, leva, torno); como en piedras de afilar.
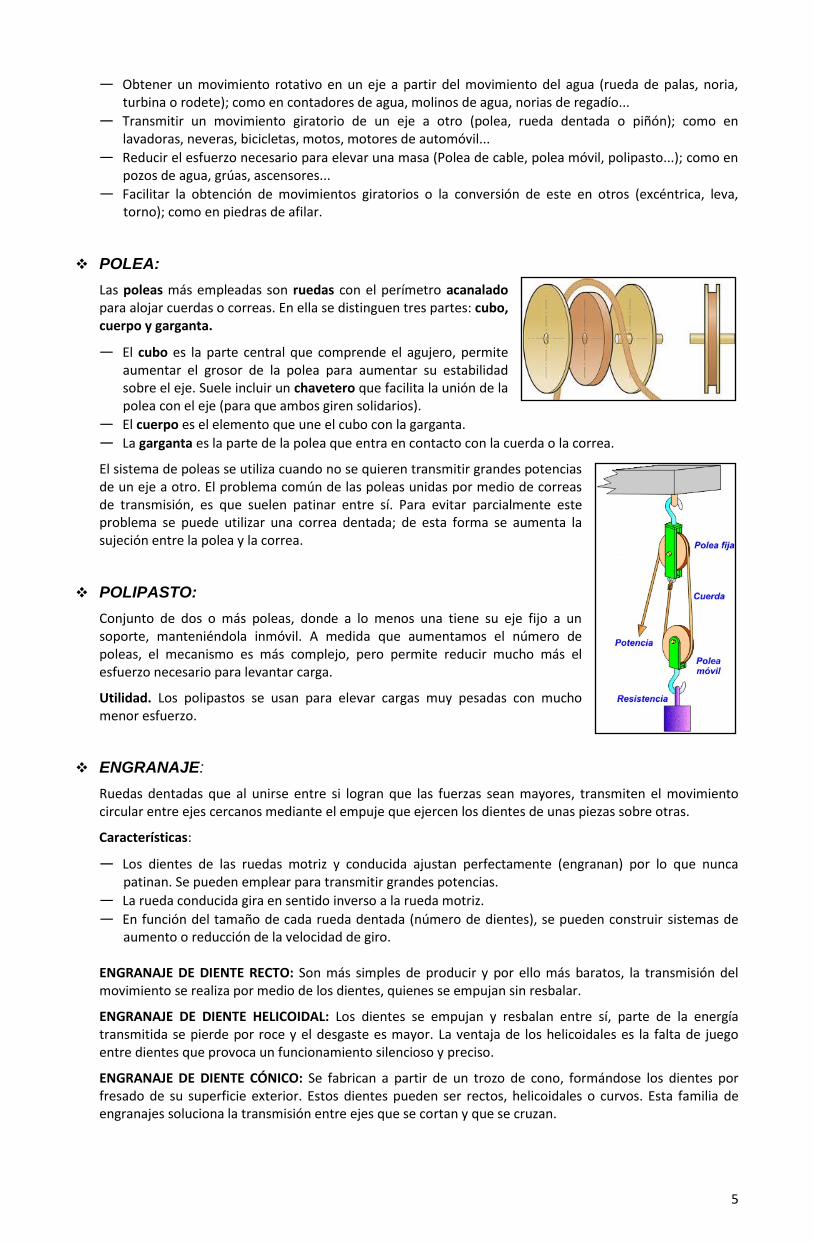
POLEA:
Las poleas más empleadas son ruedas con el perímetro acanalado para alojar cuerdas o correas. En ella se distinguen tres partes: cubo, cuerpo y garganta.
— El cubo es la parte central que comprende el agujero, permite aumentar el grosor de la polea para aumentar su estabilidad sobre el eje. Suele incluir un chavetero que facilita la unión de la polea con el eje (para que ambos giren solidarios).
— El cuerpo es el elemento que une el cubo con la garganta.
— La garganta es la parte de la polea que entra en contacto con la cuerda o la correa.
El sistema de poleas se utiliza cuando no se quieren transmitir grandes potencias de un eje a otro. El problema común de las poleas unidas por medio de correas de transmisión, es que suelen patinar entre sí. Para evitar parcialmente este problema se puede utilizar una correa dentada; de esta forma se aumenta la sujeción entre la polea y la correa.
POLIPASTO:
Conjunto de dos o más poleas, donde a lo menos una tiene su eje fijo a un soporte, manteniéndola inmóvil. A medida que aumentamos el número de poleas, el mecanismo es más complejo, pero permite reducir mucho más el esfuerzo necesario para levantar carga.
Utilidad. Los polipastos se usan para elevar cargas muy pesadas con mucho menor esfuerzo.
ENGRANAJE:
Ruedas dentadas que al unirse entre si logran que las fuerzas sean mayores, transmiten el movimiento circular entre ejes cercanos mediante el empuje que ejercen los dientes de unas piezas sobre otras.
Características:
— Los dientes de las ruedas motriz y conducida ajustan perfectamente (engranan) por lo que nunca patinan. Se pueden emplear para transmitir grandes potencias.
— La rueda conducida gira en sentido inverso a la rueda motriz.
— En función del tamaño de cada rueda dentada (número de dientes), se pueden construir sistemas de aumento o reducción de la velocidad de giro.
ENGRANAJE DE DIENTE RECTO: Son más simples de producir y por ello más baratos, la transmisión del movimiento se realiza por medio de los dientes, quienes se empujan sin resbalar.
ENGRANAJE DE DIENTE HELICOIDAL: Los dientes se empujan y resbalan entre sí, parte de la energía transmitida se pierde por roce y el desgaste es mayor. La ventaja de los helicoidales es la falta de juego entre dientes que provoca un funcionamiento silencioso y preciso.
ENGRANAJE DE DIENTE CÓNICO: Se fabrican a partir de un trozo de cono, formándose los dientes por fresado de su superficie exterior. Estos dientes pueden ser rectos, helicoidales o curvos. Esta familia de engranajes soluciona la transmisión entre ejes que se cortan y que se cruzan.

6
D. RECTO D. HELICOIDAL D. CÓNICO
TORNILLO SINFÍN – CORONA:
Es un tornillo sin cabeza, diseñado para engranar sobre una rueda dentada (Corona) cuyo eje forma con el del tornillo un ángulo determinado. Se emplea, junto con un engranaje que tiene los dientes cóncavos e inclinados, para la transmisión de movimiento entre dos ejes que se cruzan sin cortarse. El tornillo sinfín se conecta al eje conductor. Mientras que el engranaje lo hace al conducido, obteniéndose el avance de un diente de la rueda por cada vuelta completa del sinfín.
Características:
— Es un mecanismo que se usa para transmitir un movimiento circular entre ejes perpendiculares.
— Es un mecanismo que proporciona una gran reducción de velocidad de giro..
CREMALLERA – PIÑON:
En mecánica se entiende por cremallera a un prisma rectangular con una de sus caras laterales dentada. Desde el punto de vista tecnológico podemos considerarla como un caso particular de la rueda dentada, pues puede suponerse que es un engranaje de radio infinito. Se emplea, junto con un engranaje, para convertir un movimiento giratorio en longitudinal. Es de gran aplicación en puertas automáticas de corredera, algunas máquinas herramientas (taladros, tornos, fresadoras...)
LEVA:
La leva es un disco con un perfil externo parcialmente circular sobre el que apoya un operador móvil (seguidor de leva) destinado a seguir las variaciones del perfil de la leva cuando esta gira. Como seguidor de leva pueden emplearse émbolos (para obtener movimientos de vaivén) o palancas (para obtener movimientos angulares) que en todo momento han de permanecer en contacto con el contorno de la leva. La leva, nos permite transformar un movimiento rotativo (giratorio) en alternativo.
EXCÉNTRICA:
Tanto la excéntrica como el resto de operadores similares a ella: manivela, pedal, cigüeñal, derivan de la rueda y se comportan como una palanca. La excéntrica es, un disco (rueda) dotado de dos ejes: Eje de giro y el excéntrico. Por tanto, en la excéntrica se distinguen tres partes claramente diferenciadas:
— El disco, sobre el que se sitúan los dos ejes.
— El eje de giro, que está situado en el punto central del disco (o rueda) y es el que guía su movimiento giratorio.
— El eje excéntrico, que está situado paralelo al anterior pero a una cierta distancia “R” del mismo. Al girar el disco, este eje describe una circunferencia cuyo radio viene determinado por la distancia al eje de giro.
7
Utilidad. Imprimir un movimiento giratorio a un eje empleando las manos. Con la ayuda de una biela, transformar en lineal alternativo el movimiento giratorio de un eje (la conversión también puede hacerse a la inversa). Con la ayuda de un sistema palanca-biela, transformar en giratorio el movimiento alternativo producido por un pie.
MANIVELA:
Es un eje acodado, conceptualmente derivado de la palanca y la rueda. En ella se pueden distinguir tres partes principales: Eje, Brazo y Empuñadura.
— El eje determina el centro de giro de la manivela.
— El brazo determina la distancia entre eje y empuñadura. Es similar al brazo de una palanca.
— La empuñadura es la parte adaptada para ser cogida con las manos (en el caso de los pedales esta se adapta a las características del pie).
Utilidad: La manivela es un operador manual que permite disminuir la fuerza necesaria para imprimir, un movimiento rotativo a una eje (Cuando se emplean los pies recibe el nombre de pedal). Para ello se basa, en realidad, en la palanca.
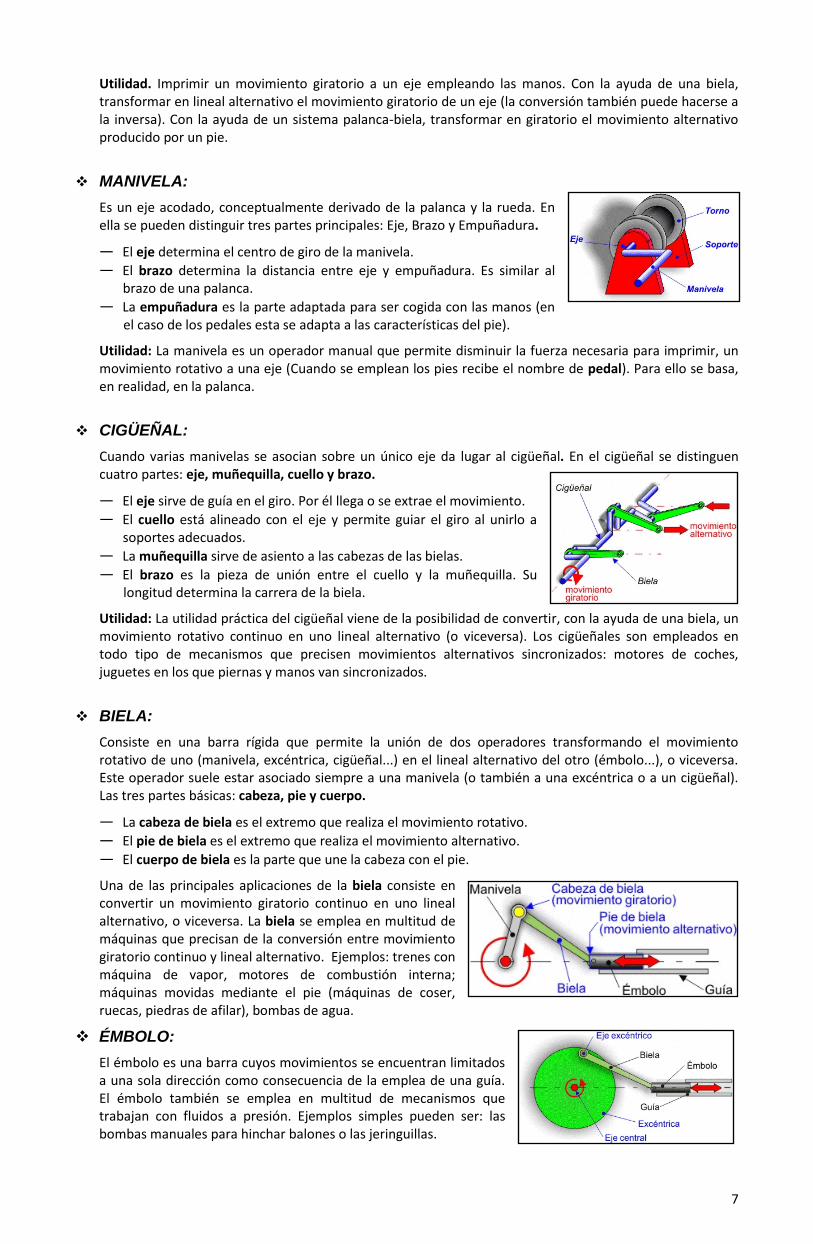
CIGÜEÑAL:
Cuando varias manivelas se asocian sobre un único eje da lugar al cigüeñal. En el cigüeñal se distinguen cuatro partes: eje, muñequilla, cuello y brazo.
— El eje sirve de guía en el giro. Por él llega o se extrae el movimiento.
— El cuello está alineado con el eje y permite guiar el giro al unirlo a soportes adecuados.
— La muñequilla sirve de asiento a las cabezas de las bielas.
— El brazo es la pieza de unión entre el cuello y la muñequilla. Su longitud determina la carrera de la biela.
Utilidad: La utilidad práctica del cigüeñal viene de la posibilidad de convertir, con la ayuda de una biela, un movimiento rotativo continuo en uno lineal alternativo (o viceversa). Los cigüeñales son empleados en todo tipo de mecanismos que precisen movimientos alternativos sincronizados: motores de coches, juguetes en los que piernas y manos van sincronizados.
BIELA:
Consiste en una barra rígida que permite la unión de dos operadores transformando el movimiento rotativo de uno (manivela, excéntrica, cigüeñal...) en el lineal alternativo del otro (émbolo...), o viceversa. Este operador suele estar asociado siempre a una manivela (o también a una excéntrica o a un cigüeñal). Las tres partes básicas: cabeza, pie y cuerpo.
— La cabeza de biela es el extremo que realiza el movimiento rotativo.
— El pie de biela es el extremo que realiza el movimiento alternativo.
— El cuerpo de biela es la parte que une la cabeza con el pie.
Una de las principales aplicaciones de la biela consiste en convertir un movimiento giratorio continuo en uno lineal alternativo, o viceversa. La biela se emplea en multitud de máquinas que precisan de la conversión entre movimiento giratorio continuo y lineal alternativo. Ejemplos: trenes con máquina de vapor, motores de combustión interna; máquinas movidas mediante el pie (máquinas de coser, ruecas, piedras de afilar), bombas de agua.
ÉMBOLO:
El émbolo es una barra cuyos movimientos se encuentran limitados a una sola dirección como consecuencia de la emplea de una guía. El émbolo también se emplea en multitud de mecanismos que trabajan con fluidos a presión. Ejemplos simples pueden ser: las bombas manuales para hinchar balones o las jeringuillas.
8
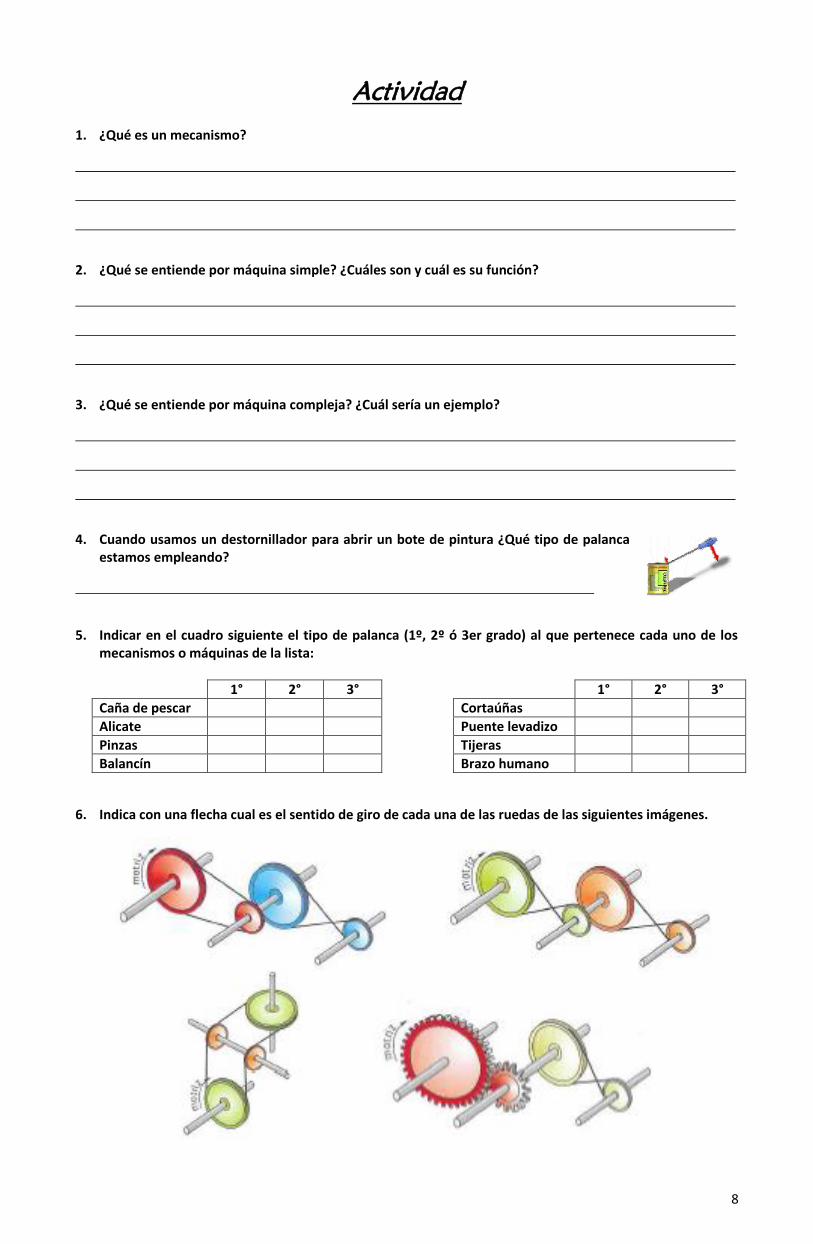
Actividad
1. ¿Qué es un mecanismo?
2. ¿Qué se entiende por máquina simple? ¿Cuáles son y cuál es su función?
3. ¿Qué se entiende por máquina compleja? ¿Cuál sería un ejemplo?
4. Cuando usamos un destornillador para abrir un bote de pintura ¿Qué tipo de palanca estamos empleando?
5. Indicar en el cuadro siguiente el tipo de palanca (1º, 2º ó 3er grado) al que pertenece cada uno de los mecanismos o máquinas de la lista:
1° 2° 3° 1° 2° 3°
Caña de pescar Cortaúñas
Alicate Puente levadizo
Pinzas Tijeras
Balancín Brazo humano
6. Indica con una flecha cual es el sentido de giro de cada una de las ruedas de las siguientes imágenes.

9
7. Completa la siguiente frase, empleando estas palabras: COMPLEJO – FIJAS – POLIPASTO – AUMENTA – ESFUERZO – MÓVILES – DOS
“Un conjunto de dos o más poleas se denomina . Está constituido por
grupos de poleas: y . A medida que
el número de poleas, el mecanismo se hace más , pero el
disminuye.”
8. Los siguientes trenes de mecanismos están formados por un sistema de poleas y otro de engranajes. a) Indica con flechas el sentido de giro de cada elemento. b) Rodea con un círculo la respuesta correcta.
La polea “A” va + - = Rápida que la polea “B”
La polea “B” va + - = Rápida que la polea “C”
La polea “C” va + - = Rápida que la polea “D”
La polea “D” va + - = Rápida que la polea “A”
El engranaje “A” va + - = Rápida que el engranaje “B”
El engranaje “B” va + - = Rápida que el engranaje “C”
El engranaje “C” va + - = Rápida que el engranaje “D”
El engranaje “D” va + - = Rápida que el engranaje “A”
La polea “A” va + - = Rápida que la polea “B”
La polea “B” va + - = Rápida que el engranaje “C”
El engranaje “C” va + - = Rápida que el engranaje “D”
El piñón “A” va + - = Rápida que el engranaje “B”
El engranaje “B” va + - = Rápida que el piñón “C”
El piñón “C” va + - = Rápida que el engranaje “D”
El engranaje “D” va + - = Rápida que el piñón “A”
El engranaje “A” va + - = Rápida que el engranaje “B”
El engranaje “B” va + - = Rápida que la polea “C”
La polea “C” va + - = Rápida que la polea “D”
La polea “D” va + - = Rápida que el engranaje “A”
El engranaje “A” va + - = Rápida que el piñón “B”
El piñón “B” va + - = Rápida que la polea “C”
La polea “C” va + - = Rápida que la polea “D”

10
Conozcamos a un genio en el arte de crear mecanismos
- Leonardo Da Vinci (1452 – 1519) -
Nació en la Republica de Florencia (Italia). Fue un genio como artista, pensador, inventor e investigador. Es considerado un modelo del hombre en el Renacimiento.
Leonardo partía siempre de problemas importantes, indagando soluciones técnicas. De esa forma, fue capaz de inventar una grúa móvil (para elevar cargas pesadas) que permitía prestar labores de construcción de una manera más fácil. La grúa de Leonardo esta puesta sobre un vehículo y se maneja desde la parte superior mediante un cable tensado.
Da Vinci no plantea este tipo de construcciones solo como nociones sin elaborar sino que repara todos los detalles relacionados con ellas. Imagina y crea un grupo de dispositivos para sistemas mecánicos, como por ejemplo, engranajes helicoidales, tornillos sinfín, entre otros.
En 1510, Leonardo inventa un molino de aire caliente (rueda de palas) basado en el principio de la rueda de palas. Este mecanismo se apoya en el aprovechamiento del calor residual. Un rotor de palas instalado en la chimenea gira a consecuencia de la ascensión de los gases de combustión calientes, haciendo girar un asador mediante un sistema de ruedas dentadas.
Leonardo también fue un gran estudioso de la anatomía de las aves y de su forma de volar. Esto lo llevó a diseñar máquinas que permitieran al hombre viajar por el aire. Entre ellas se encuentra el Ornitóptero (alas movidas mecánicamente), el helicóptero (usaba una hélice) y el planeador (sólo el impulso del viento).
Si bien en su época nunca consiguió construir sus máquinas, sus diseños se conservaron y más adelante fueron de inspiración para muchos científicos que lograron el sueño de volar.
TORNILLO AÉREO AUTOMOVILE (1495)
ORNITÓPTERO
MÁQUINA VOLADORA
Aprender es la única cosa de la que una mente nunca se cansa,
nunca tiene miedo y nunca se arrepiente.
- Leonardo Da Vinci -