
Análisis cinemático y dinámico de un mecanismo de corte mediante métodos graficos
9
M. Ulloa Badilla Departamento de Ingeniería Mecánica, Universidadde Concepción, Concepción, Chile e-mail: [email protected] R. Vera Torres Departamento de Ingeniería Mecánica, Universidadde Concepción, Concepción, Chile e-mail: [email protected] J. Yevenes Galaz Departamento de Ingeniería Mecánica, Universidadde Concepción, Concepción, Chile e-mail: [email protected] D.Zambrano Belmar Departamento de Ingeniería Mecánica, Universidadde Concepción, Concepción, Chile e-mail: [email protected] Tarea N°1: Análisis Cinemático y Dinámico de un Mecanismo de Corte mediante métodos gráficos. Desde la antigüedad el hombre ha empleado máquinas o mecanismos para sustituir el esfuerzo humano en algunas actividades. Para poder analizar estos mecanismos de formacinemática y dinámica existen métodos analíticos, numéricos y gráficos. Con el avance tecnológico, en la actualidad hay programas gráficos de dibujo que facilitan el análisis de los mecanismos, producto que facilitan las mediciones y arrojan resultados precisos y rápidos. El análisis del mecanismo de corte puede llevarse a cabo por los distintos métodos existentes. Si se realiza por métodos numéricos el resultado es claramente de mejor precisión, pero se debe tener en cuenta que si se realiza por medio de métodos gráficos resulta más sencillo, se obtiene un resultado de forma más rápida y se visualiza el movimiento del mecanismo. 1 Introducción El análisis cinemático del mecanismo de corte que se muestra en la Figura 1, es semejante al de un mecanismo de 4 barras o eslabones. El estudio del movimiento de estos eslabones sin tener en cuenta las fuerzas que condicionan el movimiento, comprende la solución de tres problemas. El primero es la determinación de los desplazamientos de los eslabones y las trayectorias descritas por los puntos del eslabón. Siguiendo por la determinación de las velocidades de ciertos puntos de los eslabones y las velocidades angulares. Por último la determinación de la aceleración de ciertos puntos de los eslabones y las aceleraciones angulares. Figura 1. Mecanismo para corte de material En el análisis dinámico se debe tener en cuenta la resistencia para soportar las fuerzas o pares de torsión que actúan sobre los eslabones del mecanismo. Las fuerzas que actúan sobre el mecanismo, pueden por distintos motivos: el peso de los eslabones (fuerza de gravedad), fuerzas externas, fuerzas disipativas (fuerza de roce), las aceleraciones sufridas por los eslabones (fuerzas de inercia). Para facilitar el análisis se considera normalmente, que la fuerza gravedad es despreciable frente a las demás fuerzas ya que se considera perpendicular al plano de accion. Además, también se puede despreciar el efecto de la fuerza de roce, ya que se debe considerar un mecanismo bien lubricado. A pesar de estas consideraciones en el análisis dinámico se logra obtener resultados suficientemente precisos. Por tanto el estudio dinámico de un mecanismo en un plano, sólo se debe considerar las fuerzas o cargas externas e inercias. 2 Marco Teórico Si se desea calcular las velocidades de un sistema mecánico, se deberán ocupar las ecuaciones cinemáticas respectivas a la dinámica de cuerpos rígidos. Estas velocidades pueden ser representadas mediante un método gráfico, el cual seguirá mediante las ecuaciones de la cinemática para cuerpos rígidos, para graficar los diferentes vectores que constituyen la velocidad de cada punto definido. Si queremos calcular la velocidad de un punto B, teniendo la velocidad de un punto A, los cuales pertenecen a un mismo cuerpo rígido según el método de velocidad relativa, tendremos que: 1
-
Upload
matias-ulloa-badilla -
Category
Documents
-
view
21 -
download
1
description
Calculo del poligono de velocidad y aceleracion de una maquina de corte en distintas posiciones angulares, Ademas de el calculo del torque necesario para mantener una velocidad constante en la barra 2
Transcript of Análisis cinemático y dinámico de un mecanismo de corte mediante métodos graficos
M. Ulloa Badilla Departamento de Ingeniería Mecánica,
Universidadde Concepción, Concepción, Chile
e-mail: [email protected]
R. Vera Torres Departamento de Ingeniería Mecánica,
Universidadde Concepción, Concepción, Chile
e-mail: [email protected]
J. Yevenes Galaz Departamento de Ingeniería Mecánica,
Universidadde Concepción, Concepción, Chile
e-mail: [email protected]
D.Zambrano Belmar Departamento de Ingeniería Mecánica,
Universidadde Concepción, Concepción, Chile
e-mail: [email protected]
Tarea N°1: Análisis Cinemático y Dinámico de un Mecanismo de Corte mediante métodos gráficos. Desde la antigüedad el hombre ha empleado máquinas o mecanismos para sustituir el esfuerzo humano en algunas actividades. Para poder analizar estos mecanismos de formacinemática y dinámica existen métodos analíticos, numéricos y gráficos. Con el avance tecnológico, en la actualidad hay programas gráficos de dibujo que facilitan el análisis de los mecanismos, producto que facilitan las mediciones y arrojan resultados precisos y rápidos. El análisis del mecanismo de corte puede llevarse a cabo por los distintos métodos existentes. Si se realiza por métodos numéricos el resultado es claramente de mejor precisión, pero se debe tener en cuenta que si se realiza por medio de métodos gráficos resulta más sencillo, se obtiene un resultado de forma más rápida y se visualiza el movimiento del mecanismo.
1 Introducción
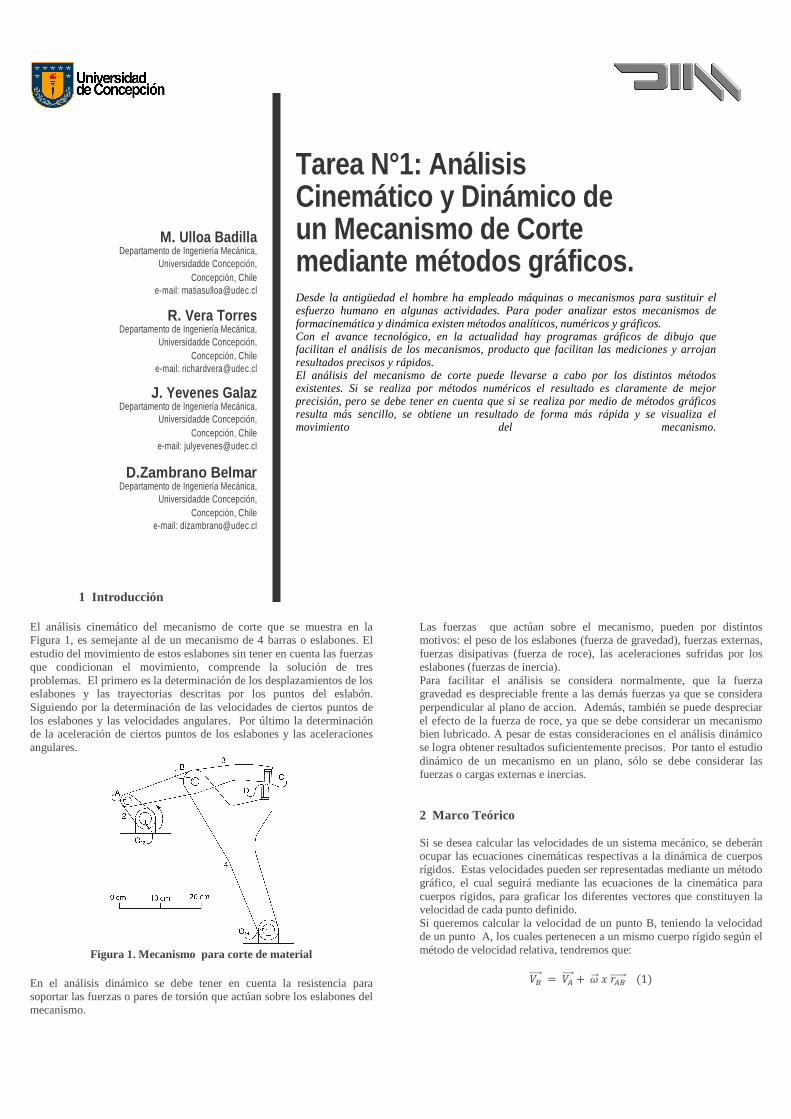
El análisis cinemático del mecanismo de corte que se muestra en la Figura 1, es semejante al de un mecanismo de 4 barras o eslabones. El estudio del movimiento de estos eslabones sin tener en cuenta las fuerzas que condicionan el movimiento, comprende la solución de tres problemas. El primero es la determinación de los desplazamientos de los eslabones y las trayectorias descritas por los puntos del eslabón. Siguiendo por la determinación de las velocidades de ciertos puntos de los eslabones y las velocidades angulares. Por último la determinación de la aceleración de ciertos puntos de los eslabones y las aceleraciones angulares.
Figura 1. Mecanismo para corte de material
En el análisis dinámico se debe tener en cuenta la resistencia para soportar las fuerzas o pares de torsión que actúan sobre los eslabones del mecanismo.
Las fuerzas que actúan sobre el mecanismo, pueden por distintos motivos: el peso de los eslabones (fuerza de gravedad), fuerzas externas, fuerzas disipativas (fuerza de roce), las aceleraciones sufridas por los eslabones (fuerzas de inercia). Para facilitar el análisis se considera normalmente, que la fuerza gravedad es despreciable frente a las demás fuerzas ya que se considera perpendicular al plano de accion. Además, también se puede despreciar el efecto de la fuerza de roce, ya que se debe considerar un mecanismo bien lubricado. A pesar de estas consideraciones en el análisis dinámico se logra obtener resultados suficientemente precisos. Por tanto el estudio dinámico de un mecanismo en un plano, sólo se debe considerar las fuerzas o cargas externas e inercias. 2 Marco Teórico Si se desea calcular las velocidades de un sistema mecánico, se deberán ocupar las ecuaciones cinemáticas respectivas a la dinámica de cuerpos rígidos. Estas velocidades pueden ser representadas mediante un método gráfico, el cual seguirá mediante las ecuaciones de la cinemática para cuerpos rígidos, para graficar los diferentes vectores que constituyen la velocidad de cada punto definido. Si queremos calcular la velocidad de un punto B, teniendo la velocidad de un punto A, los cuales pertenecen a un mismo cuerpo rígido según el método de velocidad relativa, tendremos que:
������� � ������� � ��� ��������� �1�

Si los puntos B y A no pertenecen al mismo cuerpo rígido se le suma la componente relativa a la distancia entre B y A, entonces la velocidad de B quedará definida de la forma siguiente [1].
������� � ������� � ��� ��������� � ���������� �2�
Si deseamos calcular la velocidad de B, teniendo B y A en una misma barra, además del método de la velocidad relativa tendremos el método de la proyección, el cual mediante el teorema de Kennedy [3] se encontrará un centro instantáneo [2] respecto al cual rotará la barra donde se encuentran los puntos en cuestión B y A. Conocida la velocidad de A podemos trasladarla al eje que pasa por el centro instantáneo (respecto el cual gira la barra) y el punto B y mediante proporcionalidad se obtendrá la velocidad del punto B en ese instante. La aceleración de un punto � se determina mediante la relación cinemática de aceleraciones, donde se sitúa el sistema de referencia móvil en un punto de aceleración conocida �, luego si el punto �, de barra ������ de distancia ���������, rota con velocidad angular ����, acelera angularmente ��, posee velocidad relativa ���������� y aceleración relativa ���������� , se tiene [4]:
�������� � ������� � ��� � ���� � ���������� � �� � ��������� � 2�� � ���������� � ���������� �3� Donde: ��� � ���� � ���������� Aceleración centrípeta. �� � ��������� Aceleración tangencial.
2�� � ���������� Aceleración de coriolis.
Si el punto � pertenece al mismo cuerpo rígido que el punto �, la expresión �3� queda:
�������� � ������� � ��� � ���� � ���������� � �� � ����������4�
Para nuestro caso, un sistema conformado por eslabones o barras rígidas, se calcula la aceleración del centro de masa de cada barra mediante �4�, luego conocidas las aceleraciones de cada eslabón se procede a calcular las fuerzas debido a su movimiento. Para ello se utiliza el método de D’Alambert que permite transformar el problema dinámico a un problema estático, quedando expresadas las ecuaciones de Newton como [5]:
� �� � ���� � 0 �5�
� #� � $�� � 0 �6� Así teniendo las fuerzas de inercia, por método gráfico, se trasladan a una distancia perpendicular & a su línea de acción para cancelar los momentos de inercia, donde & se obtiene mediante:
& � $����
�7�
La inercia $ de cada eslabón se calcula utilizando el Teorema de los Ejes Perpendiculares que dice que para un objeto plano, el momento de inercia sobre un eje perpendicular al plano es la suma de los momentos de inercia sobre dos ejes perpendiculares contenidos en el plano.
$( � $) � $*�8�
Por último, utilizando métodos de geometría descriptiva, se procede a determinar la totalidad de las fuerzas que mantienen en equilibro al sistema, mediante los siguientes criterios:
- Un cuerpo que está sometido a dos fuerzas está en equilibrio sí éstas son colineales.
- Un cuerpo sometido a dos fuerzas y un torque está en equilibrio si ambas fuerzas son paralelas y de sentido opuesto.
- Un cuerpo que está sometido a tres fuerzas está en equilibrio sí éstas son concurrentes a un mismo punto.
- Si se presentan más de tres fuerzas se utiliza el principio de superposición[6].
3 Desarrollo
-Polígonos de velocidades y aceleraciones: El problema consiste en encontrar los poligonos de velocidades y aceleración para un mecanismo de corte mostrado en la Figura 1 para los ángulos θ-=55°,145°,235°,325°. Para el procedimiento, se analizará el ángulo θ-=325°, pero el procedimiento es homólogo para los otros 3 ángulos de giro. En primer lugar se procede a girar o rotar el mecanismo según los ángulos θ- como se indica en la Figura 2.
Figura 2. Mecanismo de corte rotado en ./ � 0/1º
Una vez obtenido el mecanismo en las posiciones requeridas se debe comenzar con la búsqueda del centro instantáneo O34 para cada paso como muestra la Figura 3. El centro instantáneo O34 se encuentra aplicando el Teorema de Kennedy en los centros O3-, O-4 y O46, O36.
Figura 3. Ubicación del centro instantáneo de rotación
La tabla 1 contiene las distancias necesarias para el cálculo de velocidades.
Tabla 1. Distancias reales del mecanismo de corte.
Como conocemos la magnitud y sentido de la velocidad angular ω-, además la distancia O3-A������� también es conocida por lo que usando:
V:; � :-xO3-A������� Se puede determinar V:; en magnitud, dirección y sentido. Ya Conocida la V:; podemos determinar cualquier velocidad de la barra 3, esto se debe a la proyección de V:; a través de círculos concéntricos. Antes de determinar la velocidad de los puntos B y C, se debe determinar magnitud y sentido de la velocidad angular ω4 , esta la conoceremos despejando de:
V:; � :4xO34A������� → |ω4| � |?@ ||ABC;| .
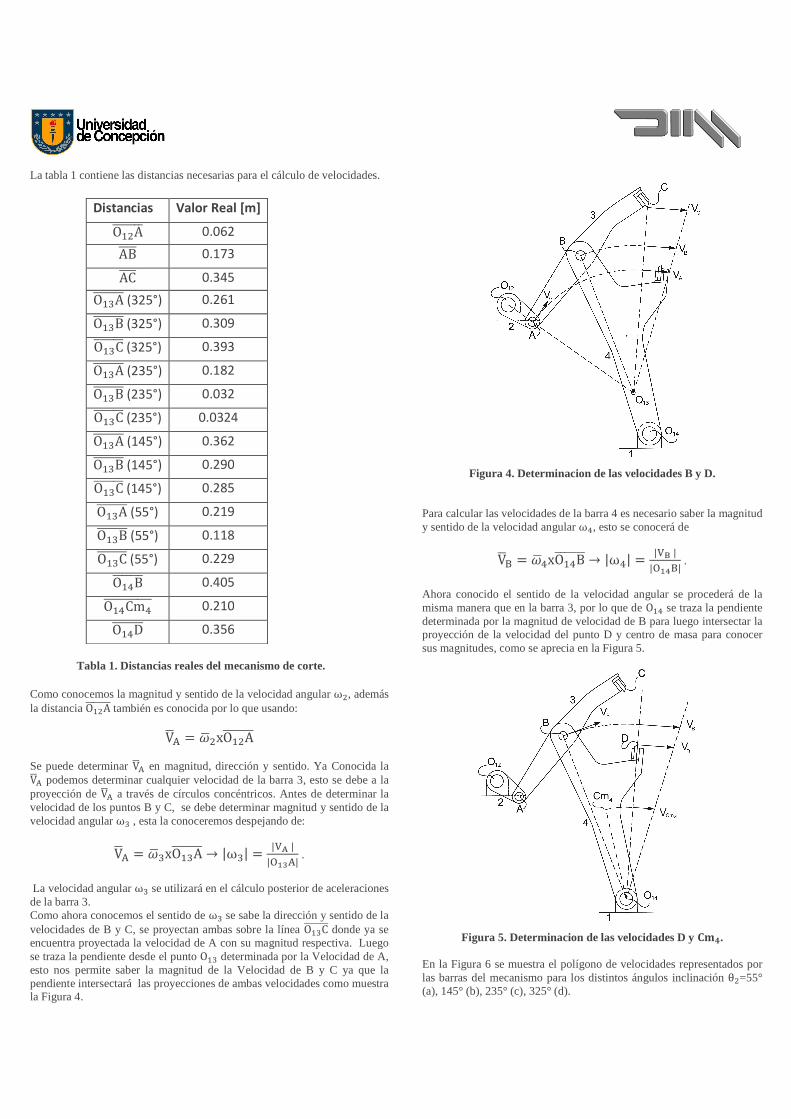
La velocidad angular ω4 se utilizará en el cálculo posterior de aceleraciones de la barra 3. Como ahora conocemos el sentido de ω4 se sabe la dirección y sentido de la velocidades de B y C, se proyectan ambas sobre la línea O34C������ donde ya se encuentra proyectada la velocidad de A con su magnitud respectiva. Luego se traza la pendiente desde el punto O34 determinada por la Velocidad de A, esto nos permite saber la magnitud de la Velocidad de B y C ya que la pendiente intersectará las proyecciones de ambas velocidades como muestra la Figura 4.
Figura 4. Determinacion de las velocidades B y D.
Para calcular las velocidades de la barra 4 es necesario saber la magnitud y sentido de la velocidad angular ω6, esto se conocerá de
V:E � :6xO36B������� → |ω6| � |?G ||ABHE| .
Ahora conocido el sentido de la velocidad angular se procederá de la misma manera que en la barra 3, por lo que de O36 se traza la pendiente determinada por la magnitud de velocidad de B para luego intersectar la proyección de la velocidad del punto D y centro de masa para conocer sus magnitudes, como se aprecia en la Figura 5.
Figura 5. Determinacion de las velocidades D y IJK.
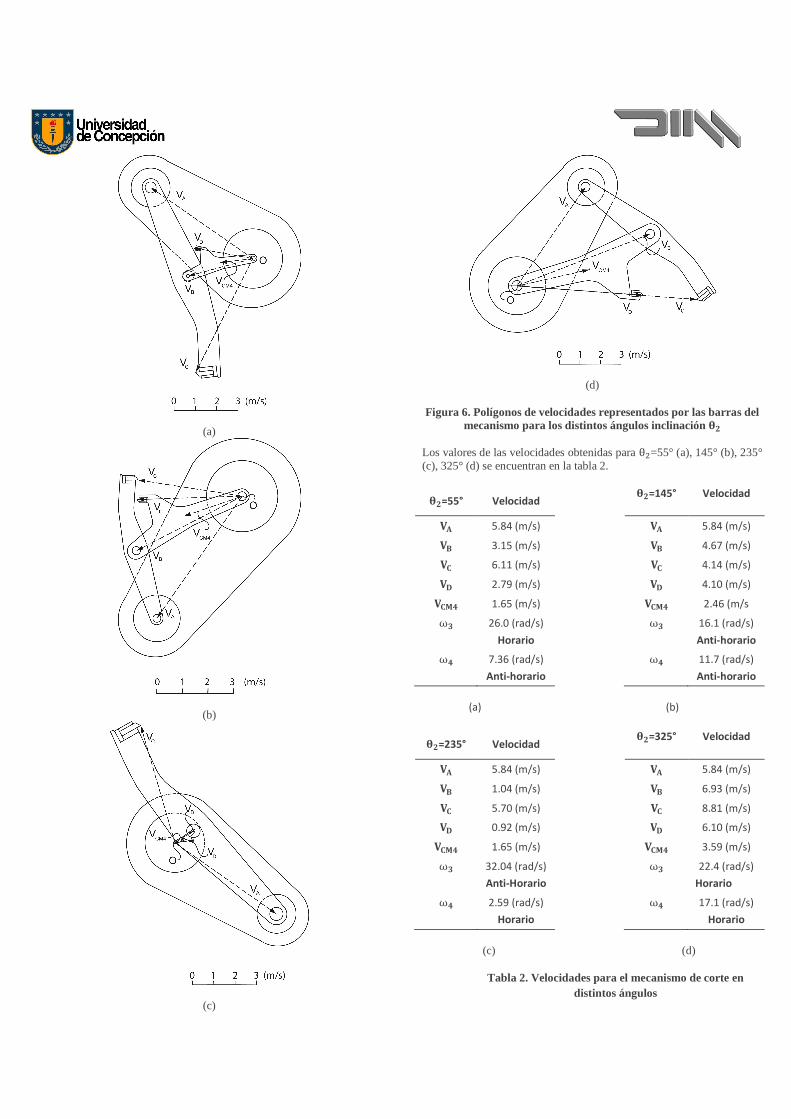
En la Figura 6 se muestra el polígono de velocidades representados por las barras del mecanismo para los distintos ángulos inclinación θ-=55° (a), 145° (b), 235° (c), 325° (d).
Distancias Valor Real [m]
O3-A������� 0.062
AB���� 0.173
AC���� 0.345
O34A������� (325°) 0.261
O34B������� (325°) 0.309
O34C������ (325°) 0.393
O34A������� (235°) 0.182
O34B������� (235°) 0.032
O34C������ (235°) 0.0324
O34A������� (145°) 0.362
O34B������� (145°) 0.290
O34C������ (145°) 0.285
O34A������� (55°) 0.219
O34B������� (55°) 0.118
O34C������ (55°) 0.229
O36B������� 0.405
O36Cm6���������� 0.210
O36D������� 0.356
(a)
(b)
(c)
(d)
Figura 6. Polígonos de velocidades representados por las barras del mecanismo para los distintos ángulos inclinación ./
Los valores de las velocidades obtenidas para θ-=55° (a), 145° (b), 235° (c), 325° (d) se encuentran en la tabla 2.
./=55° Velocidad ./=145° Velocidad
NO 5.84 (m/s) NO 5.84 (m/s)
NP 3.15 (m/s) NP 4.67 (m/s)
NI 6.11 (m/s) NI 4.14 (m/s)
NQ 2.79 (m/s) NQ 4.10 (m/s)
NIRK 1.65 (m/s) NIRK 2.46 (m/s
⍵0 26.0 (rad/s)
Horario
⍵0 16.1 (rad/s)
Anti-horario
⍵K 7.36 (rad/s)
Anti-horario
⍵K 11.7 (rad/s)
Anti-horario
(a) (b)
./=235° Velocidad ./=325° Velocidad
NO 5.84 (m/s) NO 5.84 (m/s)
NP 1.04 (m/s) NP 6.93 (m/s)
NI 5.70 (m/s) NI 8.81 (m/s)
NQ 0.92 (m/s) NQ 6.10 (m/s)
NIRK 1.65 (m/s) NIRK 3.59 (m/s)
⍵0 32.04 (rad/s)
Anti-Horario
⍵0 22.4 (rad/s)
Horario
⍵K 2.59 (rad/s)
Horario
⍵K 17.1 (rad/s)
Horario
(c) (d)
Tabla 2. Velocidades para el mecanismo de corte en distintos ángulos

Para obtener el polígono de aceleraciones, se debe calcular la aceleración del punto A utilizando la ecuación de cinemática. Se conoce que la velocidad angular ω- es constante por lo que �- es igual a cero, por tanto la aceleración de A es:
A;������ � ω-������ � Tω-������ � O3-A�����������U De aquí conoceremos su magnitud, dirección y sentido. Luego, considerando que el punto B comparte la misma posición con el punto Cm3, la aceleración del punto B se puede obtener desde dos puntos, uno es el punto A y el otro O36 . Producto de esto aparecen dos ecuaciones para la aceleración de B y en ambas se conoce la magnitud, dirección y sentido de la aceleración centrípeta, y por otra parte solo se conoce la dirección de la aceleración tangencial.
AE������ � A;������ � ω4������ � T4������ � AB������U � �4����� � AB������ �1�
AE������� � ω6������ � Tω6������ � O36B����������U � �6����� � O36B�������������������� �2�
AE������= AV 4������������ (3) Se traza la línea de dirección de la aceleración tangencial en cada caso, y el punto donde ambas líneas se intercepten es la única solución posible donde se ubique el punto B. La magnitud de la aceleración de B se conoce midiendo desde el origen del polígono hasta B, como se muestra en la figura 7.
Figura 7. Determinacion de la aceleracion del punto B y Cm3.
Para saber las magnitudes de las aceleraciones angulares �4 y �6 se deben medir en el polígono las aceleraciones tangenciales para luego despejar �de:
�W����� � �� � �� → |�| � |�W||�|
El sentido de aceleraciones angulares se calcula con la regla de la mano derecha. Conocida la aceleración angular de la barra 3 se puede determinar la aceleración de cualquier punto de ésta. En este caso calculamos la aceleración del punto C, como muestra la Figura 8.
Figura 8. Determinacion de la aceleracion del punto C. Luego al igual que en la barra 3 conocemos la aceleración angular de la barra 4, por ende calculamos de la misma forma las aceleraciónes de los punto D y Cm6 ya que se conocen todas las componentes de la ecuación cinemática de aceleración para estos puntos, como se puede apreciar en la figura 9, donde finalmente se conocen las magnitudes, direcciónes y sentidos de éstas.
Figura 9. Determinacion de las aceleraciones de los puntos D y IJK .
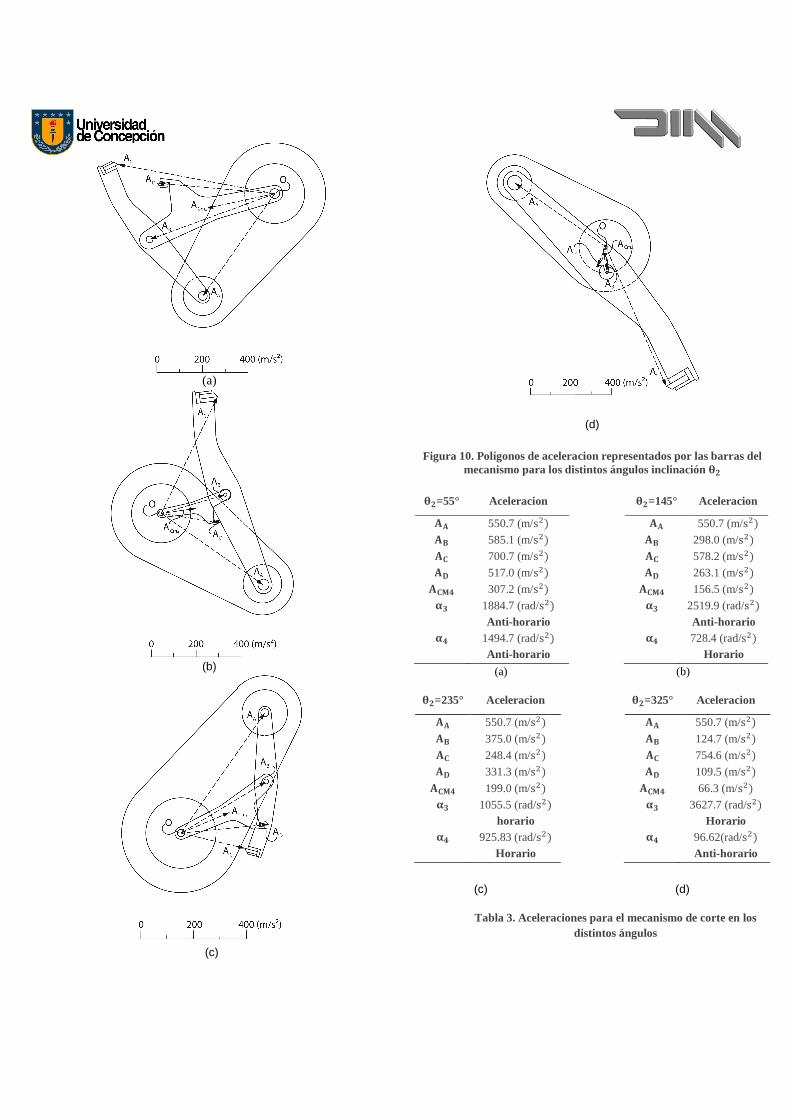
Luego de haber concentrado las componentes de la aceleración para cada punto, se procede a dibujar el polígono de aceleración representado con las barras del mecanismo de corte, como se ilustra en la Figura 10, para los distintos angulos inclinación θ-=55° (a), 145° (b), 235° (c), 325° (d) en que se encuentra el mecanismo de corte. Los resultados de estos cálculos de las aceleraciones, se tabulan en las tablas 3.a, 3.b, 3.c y 3.d, para los distintos ángulos θ-= 55°, 145°, 235° y 325° respectivamente.
(a)
(b)
(c)
(d)
Figura 10. Polígonos de aceleracion representados por las barras del
mecanismo para los distintos ángulos inclinación ./
./=55° Aceleracion ./=145° Aceleracion
OO 550.7 (m/s-� OO 550.7 (m/s-�
OP 585.1 (m/s-� OP 298.0 (m/s-�
OI 700.7 (m/s-� OI 578.2 (m/s-�
OQ 517.0 (m/s-� OQ 263.1 (m/s-�
OIRK 307.2 (m/s-� OIRK 156.5 (m/s-�
Y0 1884.7 (rad/s-�
Anti-horario
Y0 2519.9 (rad/s-�
Anti-horario YK 1494.7 (rad/s-�
Anti-horario YK 728.4 (rad/s-�
Horario
(a) (b)
./=235° Aceleracion ./=325° Aceleracion
OO 550.7 (m/s-� OO 550.7 (m/s-�
OP 375.0 (m/s-� OP 124.7 (m/s-�
OI 248.4 (m/s-� OI 754.6 (m/s-�
OQ 331.3 (m/s-� OQ 109.5 (m/s-�
OIRK 199.0 (m/s-� OIRK 66.3 (m/s-�
Y0 1055.5 (rad/s-� horario
Y0 3627.7 (rad/s-� Horario
YK 925.83 (rad/s-�
Horario
YK 96.62(rad/s-�
Anti-horario
(c) (d)
Tabla 3. Aceleraciones para el mecanismo de corte en los distintos ángulos
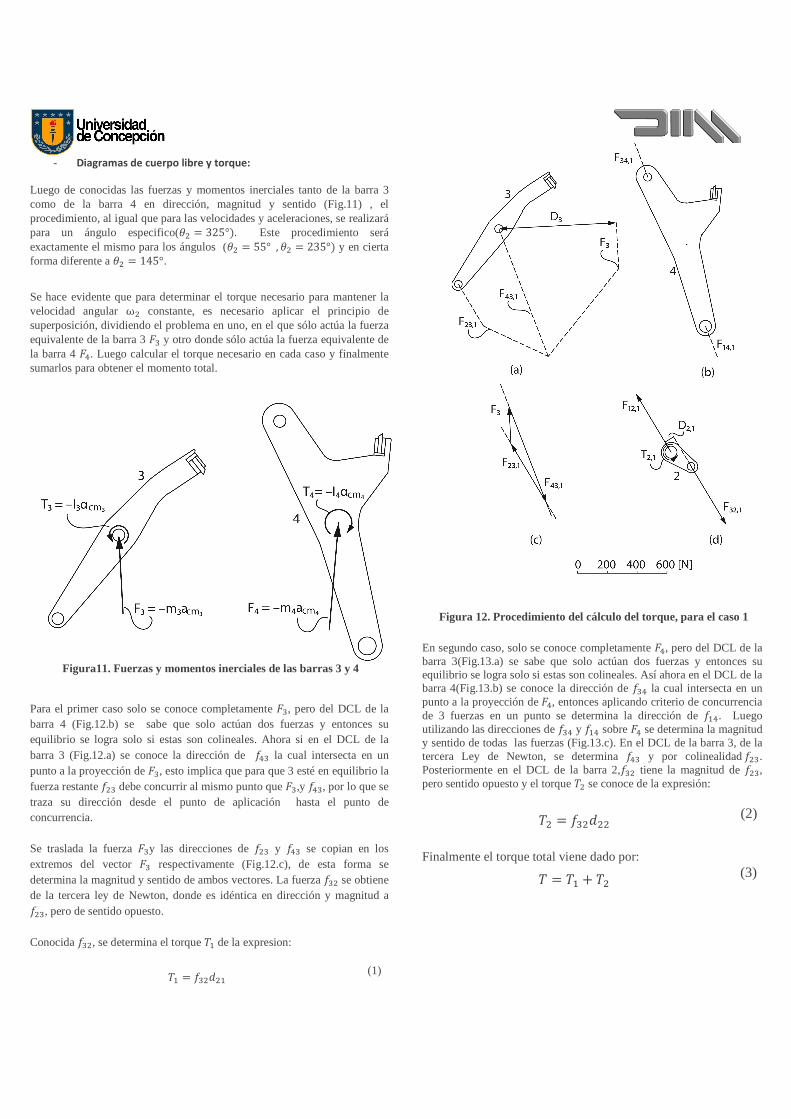
- Diagramas de cuerpo libre y torque:
Luego de conocidas las fuerzas y momentos inerciales tanto de la barra 3 como de la barra 4 en dirección, magnitud y sentido (Fig.11) , el procedimiento, al igual que para las velocidades y aceleraciones, se realizará para un ángulo especifico(Z- � 325°�. Este procedimiento será exactamente el mismo para los ángulos (Z- � 55° , Z- � 235°� y en cierta forma diferente a Z- � 145°.
Se hace evidente que para determinar el torque necesario para mantener la velocidad angular ⍵- constante, es necesario aplicar el principio de superposición, dividiendo el problema en uno, en el que sólo actúa la fuerza equivalente de la barra 3 �4 y otro donde sólo actúa la fuerza equivalente de la barra 4 �6. Luego calcular el torque necesario en cada caso y finalmente sumarlos para obtener el momento total.
Figura11. Fuerzas y momentos inerciales de las barras 3 y 4
Para el primer caso solo se conoce completamente �4, pero del DCL de la barra 4 (Fig.12.b) se sabe que solo actúan dos fuerzas y entonces su equilibrio se logra solo si estas son colineales. Ahora si en el DCL de la barra 3 (Fig.12.a) se conoce la dirección de ]64 la cual intersecta en un punto a la proyección de �4, esto implica que para que 3 esté en equilibrio la fuerza restante ]-4 debe concurrir al mismo punto que �4,y ]64, por lo que se traza su dirección desde el punto de aplicación hasta el punto de concurrencia. Se traslada la fuerza �4y las direcciones de ]-4 y ]64 se copian en los extremos del vector �4 respectivamente (Fig.12.c), de esta forma se determina la magnitud y sentido de ambos vectores. La fuerza ]4- se obtiene de la tercera ley de Newton, donde es idéntica en dirección y magnitud a ]-4, pero de sentido opuesto. Conocida ]4-, se determina el torque 3̂ de la expresion:
3̂ � ]4-&-3 (1)
Figura 12. Procedimiento del cálculo del torque, para el caso 1
En segundo caso, solo se conoce completamente �6, pero del DCL de la barra 3(Fig.13.a) se sabe que solo actúan dos fuerzas y entonces su equilibrio se logra solo si estas son colineales. Así ahora en el DCL de la barra 4(Fig.13.b) se conoce la dirección de ]46 la cual intersecta en un punto a la proyección de �6, entonces aplicando criterio de concurrencia de 3 fuerzas en un punto se determina la dirección de ]36. Luego utilizando las direcciones de ]46 y ]36 sobre �6 se determina la magnitud y sentido de todas las fuerzas (Fig.13.c). En el DCL de la barra 3, de la tercera Ley de Newton, se determina ]64 y por colinealidad ]-4. Posteriormente en el DCL de la barra 2,]4- tiene la magnitud de ]-4, pero sentido opuesto y el torque -̂ se conoce de la expresión:
-̂ � ]4-&-- (2)
Finalmente el torque total viene dado por:
^ � 3̂ � -̂ (3)
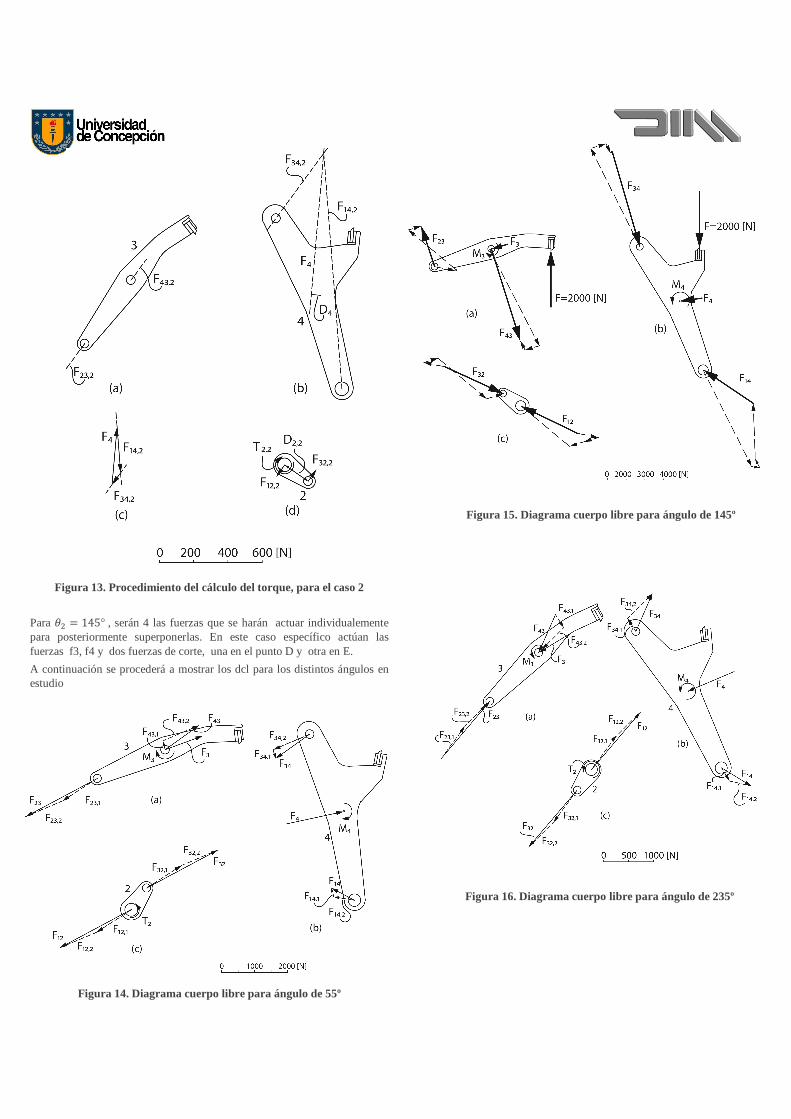
Figura 13. Procedimiento del cálculo del torque, para el caso 2
Para Z- � 145° , serán 4 las fuerzas que se harán actuar individualemente para posteriormente superponerlas. En este caso específico actúan las fuerzas f3, f4 y dos fuerzas de corte, una en el punto D y otra en E.
A continuación se procederá a mostrar los dcl para los distintos ángulos en estudio
Figura 14. Diagrama cuerpo libre para ángulo de 55º
Figura 15. Diagrama cuerpo libre para ángulo de 145º
Figura 16. Diagrama cuerpo libre para ángulo de 235º
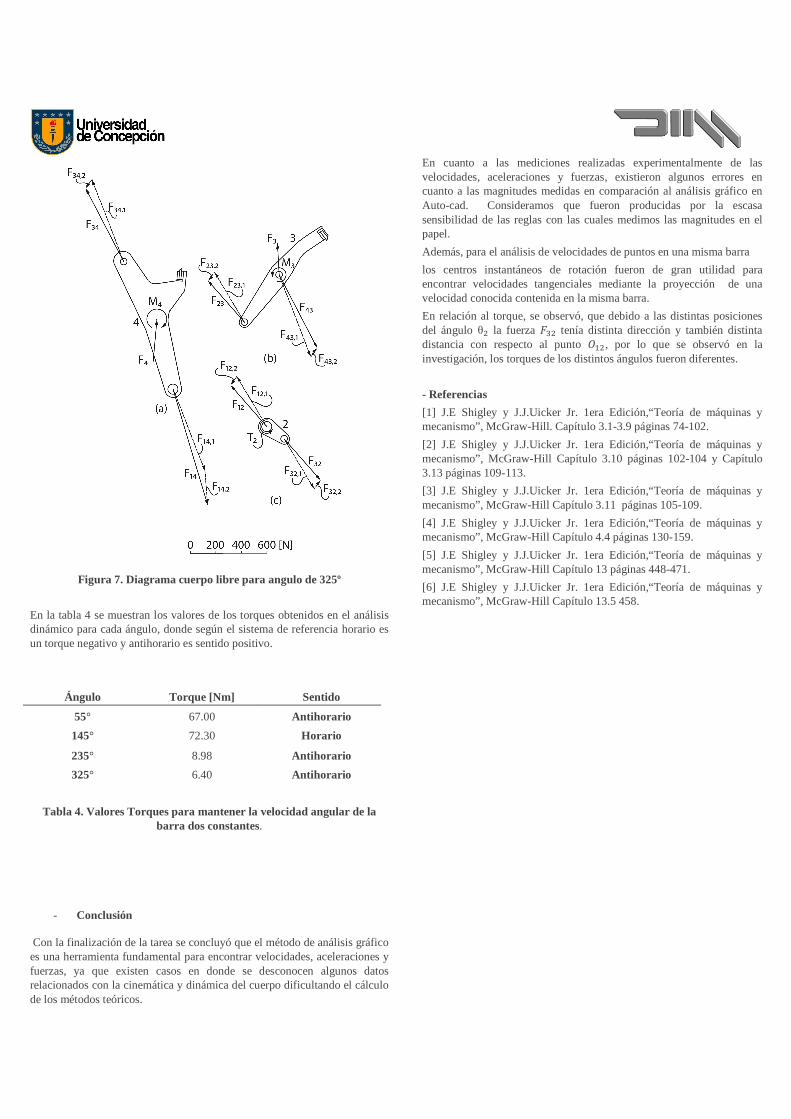
Figura 7. Diagrama cuerpo libre para angulo de 325º
En la tabla 4 se muestran los valores de los torques obtenidos en el análisis dinámico para cada ángulo, donde según el sistema de referencia horario es un torque negativo y antihorario es sentido positivo.
Ángulo Torque [Nm] Sentido
55° 67.00 Antihorario
145° 72.30 Horario
235° 8.98 Antihorario
325° 6.40 Antihorario
Tabla 4. Valores Torques para mantener la velocidad angular de la barra dos constantes.
- Conclusión
Con la finalización de la tarea se concluyó que el método de análisis gráfico es una herramienta fundamental para encontrar velocidades, aceleraciones y fuerzas, ya que existen casos en donde se desconocen algunos datos relacionados con la cinemática y dinámica del cuerpo dificultando el cálculo de los métodos teóricos.
En cuanto a las mediciones realizadas experimentalmente de las velocidades, aceleraciones y fuerzas, existieron algunos errores en cuanto a las magnitudes medidas en comparación al análisis gráfico en Auto-cad. Consideramos que fueron producidas por la escasa sensibilidad de las reglas con las cuales medimos las magnitudes en el papel.
Además, para el análisis de velocidades de puntos en una misma barra
los centros instantáneos de rotación fueron de gran utilidad para encontrar velocidades tangenciales mediante la proyección de una velocidad conocida contenida en la misma barra.
En relación al torque, se observó, que debido a las distintas posiciones del ángulo θ- la fuerza �4- tenía distinta dirección y también distinta distancia con respecto al punto _3-, por lo que se observó en la investigación, los torques de los distintos ángulos fueron diferentes.
- Referencias
[1] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill. Capítulo 3.1-3.9 páginas 74-102.
[2] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill Capítulo 3.10 páginas 102-104 y Capítulo 3.13 páginas 109-113.
[3] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill Capítulo 3.11 páginas 105-109.
[4] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill Capítulo 4.4 páginas 130-159.
[5] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill Capítulo 13 páginas 448-471.
[6] J.E Shigley y J.J.Uicker Jr. 1era Edición,“Teoría de máquinas y mecanismo”, McGraw-Hill Capítulo 13.5 458.


















