
ANÁLISIS DINÁMICO DE VIADUCTOS SOMETIDOS A ACCIONES DE...
248
ANÁLISIS DINÁMICO DE VIADUCTOS SOMETIDOS A ACCIONES DE TRENES DE ALTA VELOCIDAD José Francisco González Jiménez INGENIERO INDUSTRIAL Tutor: Pedro Galvín Barrera DEPARTAMENTO DE MECÁNICA DE LOS MEDIOS CONTINUOS, TEORÍA DE ESTRUCTURAS E INGENIERÍA DEL TERRENO UNIVERSIDAD DE SEVILLA Sevilla, Enero de 2006 Escuela Superior de Ingenieros de Sevilla UNIVERSIDAD DE SEVILLA PROYECTO FIN DE CARRERA
Transcript of ANÁLISIS DINÁMICO DE VIADUCTOS SOMETIDOS A ACCIONES DE...

ANÁLISIS DINÁMICO DE VIADUCTOS SOMETIDOS A
ACCIONES DE TRENES DE ALTA VELOCIDAD
José Francisco González Jiménez
INGENIERO INDUSTRIAL
Tutor: Pedro Galvín Barrera
DEPARTAMENTO DE MECÁNICA DE LOS MEDIOS CONTINUOS, TEORÍA
DE ESTRUCTURAS E INGENIERÍA DEL TERRENO
UNIVERSIDAD DE SEVILLA Sevilla, Enero de 2006
Escuela Superior de
Ingenieros de Sevilla
UNIVERSIDAD DE SEVILLA
PROYECTO FIN DE CARRERA

ANÁLISIS DINÁMICO DE VIADUCTOS SOMETIDOS A
ACCIONES DE TRENES DE ALTA VELOCIDAD

3
Agradecimientos
Este proyecto culmina con mi etapa de estudiante de Ingeniería Industrial en la
Escuela Superior de Ingenieros de Sevilla. Esto ha sido posible gracias a la ayuda de
muchas personas, sin las cuáles, el trabajo habría sido más duro.
En primer lugar, agradecer al Tutor del proyecto, Pedro Galvín Barrera, el
constante apoyo mostrado y su permanente disponibilidad, así como sus palabras de
ánimo en tiempos difíciles.
Por otra parte, agradecer a las personas que forman parte del foro de CalculiX su
constante ayuda en el aprendizaje de dicho programa, en especial a Guido Dhondt.
Por último quería mostrar mi profundo agradecimiento a todas las personas que
han hecho que estos años de carrera hayan pasado de la mejor forma posible: mi familia
y mis buenos amigos.

Índice Proyecto Fin de Carrera
4
ÍNDICE
Índice……………………………………………………………………………...
1.- Introducción y objetivos del proyecto.………………………………………
2.- Descripción de los programas de elementos finitos: CalculiX y
FEAPpv…………………………………………………………………………....
2.1.- Método de los elementos finitos……………………………………..
2.2.- Análisis dinámico de estructuras basado en elementos finitos.……...
2.3.- Discretización temporal…………...…………………………………
2.3.1.- Métodos de integración temporal….………………………….
2.3.2.- Familia de métodos de Newmark……………………………..
2.3.3.- Sensibilidad al paso de integración utilizado…………………..
2.4.- Matriz de amortiguamiento.…………………………………………
2.5.- CalculiX: Programa de elementos finitos tridimensional.…………..
2.5.1.- Historia del programa………………………………………..
2.5.2.- Descripción del programa……………………………………
2.6.- FEAPpv: Un programa de elementos finitos. Versión personal…….
2.6.1.- Descripción del programa………………………………….
3.- Validación de los programas de elementos finitos: CalculiX y
FEAPpv.……………………………………………………………….…………..
3.1.- Validación de CalculiX.……………………………………………...
3.1.1.- Problemas estáticos…………………………………………..
3.1.1.1.- Viga biapoyada con carga vertical en el centro……………..
3.1.1.2.- Viga en voladizo con carga vertical en el extremo libre………
3.1.2.- Problemas dinámicos…………………………………………
3.1.2.1.- Cubo bajo una presión variable en el tiempo………………..
3.2.- Validación de FEAPpv……………………………………………....
3.2.1.- Problemas estáticos………………………………………….
4
8
11
11
12
15
15
19
22
24
27
27
27
30
30
34
34
34
34
40
43
43
55
55

Índice Proyecto Fin de Carrera
5
3.2.1.1.- Viga biapoyada con carga vertical en el centro……………..
3.2.1.2.- Viga en voladizo con carga vertical en el extremo libre………
3.2.2.- Problemas dinámicos…………………………………….…...
3.2.2.1.- Viga biempotrada con carga vertical de tipo Heaviside………
3.2.2.2.- Viga biempotrada con carga vertical transitoria……………..
3.3.- Elección del programa ………………………..……………………..
4.- La resonancia en los puentes de ferrocarril y los métodos de cálculo
dinámico utilizados ……………………………………………………………....
4.1.- Normativa actual……..………………………………………………
4.1.1.- Ficha UIC-776-I R…………………………………………...
4.1.2. Instrucción IAPF-75…………………………………………..
4.2.- Efectos resonantes……………………………………………………
4.2.1.- Cálculo de la respuesta estática………………………………..
4.2.2.- Respuesta dinámica ante una carga móvil aislada……………...
4.2.3.- Respuesta dinámica producida por un tren de cargas móviles…..
4.2.4.- Coeficientes de impacto………………………………...…….
4.3.- Riesgo de resonancia…………...…………………………………….
4.4.- Modelos de cargas puntuales………………………………………...
4.5.- Modelo de cargas puntuales teniendo en cuenta la deflexión de la
vía, las traviesas y la flexibilidad del balasto……………………......
4.5.1.- Hipótesis y simplificaciones en el cálculo de la curva de
deflexión……………………………………………………
4.5.2.- Cálculo cuasi-estático de la curva de deflexión de la vía………..
4.5.3.- Cálculo dinámico de la curva de deflexión de la vía.………...…
4.5.4.- Fuerza aplicada por una traviesa sobre la estructura……………
4.6.- Vehículos ferroviarios utilizados…………………...………………..
4.7.- Modelos de puentes utilizados……………………………………….
4.7.1.- Tipos de modelos y elementos………………………………...
4.7.2.- Conexión estructura-suelo…………………………………….
4.7.3.- Modelo de puentes teniendo en cuenta las traviesas……………
55
58
61
61
67
71
73
73
74
77
78
79
79
80
82
83
85
88
89
90
92
94
98
101
101
104
105

Índice Proyecto Fin de Carrera
6
5.- Análisis de distintas tipologías de puentes……………………………..……
5.1.- Análisis de puentes de un vano………………………………………
5.1.1.- Puente de un vano de 20 metros y estribos de 8.5 metros……….
5.1.2.- Puente de un vano de 30 metros y estribos de 8.5 metros……….
5.1.3.- Puente de un vano de 20 metros y estribos de 12 metros………..
5.1.4.- Puente de un vano de 30 metros y estribos de 12 metros………..
5.1.5.- Comparación de la respuesta entre puentes de distintas
longitudes de vano…………………………………………..
5.1.6.- Comparación de la respuesta entre puentes de distintas alturas de
los estribos………………………………………………….
5.2.- Análisis de puentes de dos vanos…………………………………….
5.2.1.- Puente de dos vanos de 10 metros cada uno y estribos de 8.5
metros……………………………………………………....
5.2.2.- Puente de dos vanos de 10 metros cada uno y estribos de 12
metros………………………………………………………
5.2.3.- Puente de dos vanos de 15 metros cada uno y estribos de 8.5
metros………………………………………………………
5.2.4.- Puente de dos vanos de 15 metros cada uno y estribos de 12
metros………………………………………………………
5.2.5.- Puente de dos vanos de 25 metros cada uno y estribos de 8.5
metros………………………………………………………
5.2.6.- Puente de dos vanos de 25 metros cada uno y estribos de 12
metros………………………………………………………
5.3.- Análisis de puentes de cuatro vanos…………………………………
5.3.1.- Puente de cuatro vanos de 40 metros cada uno y estribos de 10
metros………………………………………………………
5.4.- Estudio de un viaducto isostático de 15 metros de luz………………
5.4.1.- Comparación de los resultados y validación de la metodología
usada……………………………………………………….
5.4.2.- Barrido de velocidades para diferentes tipos de trenes reales…...
5.5.- Estudio de un viaducto real: Viaducto E-II………………………….
5.6.- Estudio de un viaducto con tablero de doble viga sobre el que
circulan dos trenes en sentido opuesto…………………………………….
106
106
109
125
136
137
139
141
144
144
157
159
168
171
181
183
183
191
193
195
199
207

Índice Proyecto Fin de Carrera
7
6.- Conclusiones y líneas de investigación propuestas…………………………
6.1.- Conclusiones de la investigación desarrollada………………………
6.2.- Líneas de investigación propuestas………………………………….
A.- Características de trenes de alta velocidad europeos……………………...
A.1.- ICE 2………………………………………………………………...
A.2.- AVE…………………………………………………………………
A.3.- TALGO AV…………………………………………………………
B.- Descripción de la Hoja de EXCEL donde se implementa las ecuaciones
que recogen los efectos de la deflexión de la vía, las traviesas y la flexibilidad
del balasto………………………………………………………………………...
C.- Descripción del programa encargado de realizar la superposición de la
respuesta correspondiente a una carga aislada………………………………...
D.- Desarrollo de las soluciones teóricas de una viga biapoyada y una viga
en voladizo………………………………………………………………………...
D.1.- Viga biapoyada con carga vertical en el centro……………………..
D.2.- Viga en voladizo con carga vertical en el extremo libre……………
Bibliografía……………………………………………………………………….
218
218
220
224
224
227
230
232
234
237
237
241
244

Introducción y objetivos del proyecto Proyecto Fin de Carrera
8
1.- Introducción y objetivos del proyecto.
En este proyecto se abordan dos objetivos claramente diferenciados:
En primer lugar nos centraremos en la búsqueda y validación de programas de
elementos finitos no comerciales para un posterior acoplamiento con programas de
elementos de contorno.
En segundo lugar se realizará un estudio paramétrico de puentes de diversas
tipologías teniendo en cuenta los efectos dinámicos debidos a las cargas móviles de los
trenes.
En los últimos años, tanto en España como en otros países europeos, la
construcción de infraestructuras ferroviarias para trenes de alta velocidad ha
experimentado un auge. Dichos trenes han cambiado el concepto de largo recorrido,
permitiendo reducir significativamente el tiempo de transporte para viajeros y
mercancías.
Pero no se puede olvidar que al aumentar la velocidad, los puentes de ferrocarril se
verán sometidos a efectos dinámicos que pueden crear efectos resonantes y que hasta el
momento no han sido estudiados suficientemente. En la actualidad, los puentes para
trenes de alta velocidad viene siendo objeto de estudio en el Departamento de Mecánica
de los Medios Continuos de la Escuela Superior de Ingenieros de Sevilla. De esta forma
este proyecto viene a ser una continuación de otros proyectos y estudios realizados en
dicho departamento así como los cimientos de futuros proyectos que podrán servirse de
la información mostrada.
En primer lugar se buscó programas de elementos finitos no comerciales de los
cuales tuviésemos su programación y que además cumpliera una serie de requisitos
adicionales: debía de ser capaz de realizar análisis transitorios con carga móviles con el
objeto de modelar los trenes de alta velocidad para un posterior estudio de puentes de
ferrocarril. Debía de ser lo más sencillo posible de forma que sólo nos interesaba del
programa su capacidad para realizar análisis transitorios. Este aspecto era difícil de
conseguir en la medida que cualquier programa de elementos finitos tenía muchas más
opciones, por ello se realizaría un estudio de la programación del programa para así

Introducción y objetivos del proyecto Proyecto Fin de Carrera
9
quedarnos con aquellas subrutinas que nos interesaran. A ser posible el lenguaje de
programación debía de ser FORTRAN ya que en un futuro este programa sería acoplado
con otro programa de elementos de contorno cuyo lenguaje de programación es este
último.
Esta conexión entre elementos finitos y elementos de contorno permitirá un
estudio mucho más exhaustivo de la influencia que tiene en puentes ferroviarios la
interacción suelo-estructura. Esto es debido a que el modelado del suelo con elementos
de contorno ofrece mejores resultados que si el modelado es con elementos finitos.
Con las premisas anteriores se encontró en primer momento un programa llamado
CalculiX [2], el cuál fue analizado tanto en sus posibilidades como en su programación.
Más tarde, otro programa llamado FEAPpv [16] fue el centro de nuestras miras, de
forma que se hizo lo mismo que con el anterior y además se comparó con este último.
De entre ambos se eligió el programa FEAPpv por ser el que cumplía mejor los
requisitos mostrados. Así se pasó a la segunda parte del proyecto, consistente en un
estudio de puentes ferroviarios de distintas tipologías que permita obtener conclusiones
generales. Para esta parte se utilizará además del programa mencionado, otro programa
comercial y más potente llamado ANSYS Release 8.0 [1].
En lo que se refiere a la geometría de los puentes, se pretende obtener información
acerca de cómo varía la respuesta de la estructura al variar la longitud de los vanos, el
número de éstos o la altura de los estribos.
En cuanto a los vehículos ferroviarios, se buscan conclusiones acerca del impacto
que éstos tienen sobre la estructura cuando son modelados como una serie de cargas
puntuales que recorren la estructura y cuando además se tiene en cuenta los efectos
asociados a la flexibilidad del carril, las traviesas y el balasto. Por otra parte también se
observará la variación de la respuesta de la estructura al variar la velocidad de los
trenes.

Introducción y objetivos del proyecto Proyecto Fin de Carrera
10
Por último, relacionado con la conexión suelo-estructura, se estudiará la
utilización de apoyos modelados como muelles. Cada muelle tendrá una rigidez
equivalente al terreno sobre el que se encuentra el puente.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
11
2.- Descripción de los programas de elementos finitos:
CalculiX y FEAPpv.
En este punto se pretende dar una visión global acerca del análisis dinámico y
transitorio de estructuras desde el punto de vista de los elementos finitos. Para ello se
citarán los distintos métodos y tipos de análisis existentes así como otros aspectos de
relevancia en dicho campo. Por último se hará una descripción de los programas que ha
sido objeto de nuestro estudio.
2.1. Método de los elementos finitos.
No es objeto de esta memoria el describir la influencia tan determinante que han
ejercido los métodos de elementos finitos dentro del ámbito del cálculo estructural.
Debido a la versatilidad de su aplicación a todo tipo de estructuras así como la facilidad
con que se pueden modelar los distintos estados de carga, los elementos finitos se han
convertido en la herramienta de cálculo por excelencia de la ingeniería civil.
Este método numérico se basa en la discretización espacial de una estructura
pasando así de un problema continuo con infinitos grados de libertad a un problema
discreto con un número finito de ellos.
Los aspectos más importantes de este método son:
- Discretización física del dominio dividiéndolo en elementos cuyo
comportamiento puede ser estudiado de forma genérica.
- Discretización matemática de forma que los valores de la variable de
campo en el dominio se aproximan mediante los valores de esta en una
serie de puntos pertenecientes a los elementos y unas funciones de forma
que aproximan la solución sobre todo el dominio.
jjuu ψ= en el dominio de Ω (2.1.1)
- Las ecuaciones diferenciales que gobiernan el problema en cuestión no se
tratan directamente sino que se transforman a su versión integral de tipo

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
12
energía, siendo en el caso de estructuras el Teorema de los Trabajos
Virtuales.
2.2. Análisis dinámico de estructuras basado en elementos finitos.
El análisis dinámico es una técnica usada para determinar la respuesta dinámica de
una estructura bajo la acción de fuerzas dependientes del tiempo. Este análisis permite
conocer la variación con el tiempo de desplazamientos, esfuerzos, tensiones y fuerzas en
una estructura como respuesta de ésta a una combinación de cargas estáticas,
transitorias y armónicas. En este tipo de análisis los efectos de la inercia y del
amortiguamiento son muy importantes.
La ecuación de movimiento básica a resolver en un análisis dinámico es la
siguiente:
( ) ( ) ( ) )t(FuKuCuM =++ &&& (2.2.1)
Donde:
(M) = Matriz de masa.
(C) = Matriz de amortiguamiento.
(K) = Matriz de rigidez.
u&& = Vector de aceleración nodal.
u& = Vector de velocidad nodal.
u = Vector de desplazamiento nodal.
)t(F = Vector de fuerza dependiente del tiempo.
Para un instante dado, t, estas ecuaciones pueden ser consideradas como
ecuaciones de equilibrio estático que tienen en cuenta las fuerzas de inercia ( ) ( )uM && y
las de amortiguamiento ( ) ( )uD & . Para resolver estas ecuaciones los distintos programas
de elementos finitos utilizan métodos de integración temporal, siendo el algoritmo de
Newmark uno de lo más utilizados.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
13
Existen tres metodologías diferentes de abordar el problema anterior, utilizándose
en todas ellas la discretización e integración temporal mencionada anteriormente. Son
las siguientes:
a) Método de integración directa en el tiempo del modelo completo.
Se definen los N grados de libertad que caracterizan a la estructura y se resuelve,
para cada instante de la integración, la ecuación dinámica general (2.2.1).
Este es el método más general porque permite que todo tipo de no-linealidades
puedan ser incluidas.
Las ventajas de este método son:
• De todos, éste es el más fácil de utilizar, puesto que no hay que
preocuparse por elegir grados de libertad maestros ni por elegir los modos
de vibración más significativos.
• Permite todo tipo de no-linealidades.
• Usa las matrices completas, por tanto no hay que aproximar la matriz de
masa.
• Todos los desplazamientos y tensiones son calculados en un único paso.
• Acepta todo tipo de cargas: fuerzas nodales, desplazamientos impuestos,
cargas elementales (presiones y temperaturas), etc.
La principal desventaja del método de integración directa es que es el más caro
numéricamente hablando de los tres.
b) Método de superposición modal.
Este método sólo es aplicable para un comportamiento lineal de la estructura. En
primer lugar se extraen los autovalores de la estructura y se seleccionan los n modos
propios de vibración más significativos (N >> n). Posteriormente se integran en el
tiempo esos modos de vibración.
La ecuación que se obtiene para cada modo de vibración estará desacoplada del
resto, por lo que se reduce, en último término, a la resolución de un sistema de un único
grado de libertad.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
14
La principal ventaja es su mayor rapidez y su menor coste computacional en la
mayoría de problemas respecto a los otros dos.
Las desventajas más importantes que presentas son:
• El paso de tiempo de integración debe de permanecer constante durante
todo el análisis transitorio, por tanto no estarán permitidas las estrategias
de paso variable.
• No están permitidas las no-linealidades.
• No acepta la imposición de desplazamientos.
c) Método reducido.
Se condensa el tamaño del problema mediante la utilización de grados de libertad
maestros y matrices reducidas. Después de haber calculado los desplazamientos en los
grados de libertad maestros, se expande la solución a los grados de libertad originales.
La principal ventaja es que es más rápido y menos caro que el algoritmo a).
Las desventajas son:
• Cargas elementales como presión y temperatura no pueden ser aplicadas a
la estructura. Sin embargo aceleraciones sin son permitidas.
• Todas las cargas deben ser aplicadas en los grados de libertad maestros.
• El paso de tiempo de integración debe de permanecer constante durante
todo el análisis transitorio, por tanto no estarán permitidas las estrategias
de paso variable.
• No están permitidas las no-linealidades.
Una vez descritas las distintas metodologías existentes para resolver un problema
dinámico con el método de los elementos finitos, decir que en este proyecto se ha
optado por la utilización del método de integración directa del modelo completo por ser
el más general de todos.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
15
2.3. Discretización temporal.
Como antes se ha comentado, la discretización e integración temporal se realiza
tanto para los modelos resueltos con análisis modal, como en la integración directa del
sistema completo y en análisis reducido.
2.3.1. Métodos de integración temporal.
La ecuación de partida para un algoritmo de integración temporal de primer orden
es la siguiente:
( ) ( )( )( ) [ ]ft,tt,
ytyty,tfty
000
∈⎭⎬⎫
==&
(2.3.1)
Ha este sistema se conoce con el nombre de problema de Cauchy en un intervalo
[t0,tf], y viene dado por un sistema de ecuaciones diferenciales de primer orden y una
condición inicial.
No obstante, el sistema de ecuaciones diferenciales que aproxima la dinámica de
una estructura en general es de segundo orden y puede expresarse de forma compacta de
la siguiente forma:
( )t,w,wFwM &&& =⋅ (2.3.2)
Donde el vector F y la matriz M son, en general, funciones no lineales de ( )t,ww, & .
El sistema anterior se puede convertir en un sistema de primer orden tal como el (2.3.1)
sin más que realizar el siguiente cambio:
( )( )( ) tyt,f
t,w,wF·Mwy que tal
wwy 1- =
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=⎭⎬⎫
⎩⎨⎧=
&
&&
& (2.3.3)
Gracias a este cambio se pueden utilizar los métodos numéricos de integración
propios de sistemas de primer orden, aunque existen algoritmos específicos para
sistemas de segundo orden.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
16
Un método numérico de integración temporal calcula secuencialmente los valores
de la incógnita y(t) de una forma discreta y espaciados mediante intervalos de tiempo.
Los intervalos de tiempo se definen como:
n1n1n tth −= ++ (2.3.4)
Para cada instante tn obtendremos un valor de ( )N0,1,...,n yn = a partir del
conocimiento del valor de la misma en los k instantes anteriores. El número k es él
número de pasos del integrador.
Así llegamos a una expresión general en la que el valor de yn+k se obtiene a partir
de los k valores anteriores de la incógnita: yn+k-1, yn+k-2,…, yn.
( )∑=
++−+−+++ Φ=αk
0jknknn2kn1knknjnj h;t,y,...,y,y,y·hy (2.3.5)
En la ecuación (2.3.5) se recogen todos los métodos de integración posibles. En
base a diferentes criterios, éstos se pueden clasificar en varios tipos:
• Métodos de un paso/ métodos multipaso.
Los métodos de un paso son aquellos en que para cada instante de tiempo el valor
de la variable incógnita se calcula gracias al paso anterior. Es decir en este método
k = 1. Entre estos los más afamados son los de Runge-Kutta. Los anteriores así como
muchos otros de un paso parten de la igualdad siguiente:
( ) ( ) ( ) ( ) ( )( )dtty,tftydttytyty1n
n
1n
n
t
tn
t
tn1n ∫∫
++
+=+=+ & (2.3.6)
Según sea la aproximación de la integral de la ecuación (2.3.6) mediante alguna
fórmula de cuadratura adecuada así será el método de integración. Por citar uno de ellos,
el más conocido es el método de Runge-Kutta clásico el cual aproxima la integral de
(2.3.6) mediante la regla de Simpson.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
17
En los métodos multipaso la variable y(t) en un instante dado se calcula gracias a
la información de varios pasos anteriores. Es decir en este caso k > 1. Los más
conocidos son los métodos de Adams que se basan en aproximar la integral que aparece
en la expresión (2.3.6) mediante una fórmula de cuadratura basada en los nodos de
cuadratura tn-k+1,…,tn. Es decir, se construye el polinomio interpolador de grado k-1,
denotado por *kn,P , el cual interpola los k valores del campo f(t,y) en las aproximaciones
numéricas ( ) ( )1kn1knnn y,t,...,y,t +−+− . Por tanto el algoritmo de k-pasos quedará
como:
( )∫+
+=+
1n
n
t
t
*k,nn1n dttPyy (2.3.7)
• Métodos explícitos/métodos implícitos.
Básicamente los métodos explícitos usan la ecuación diferencial en un tiempo tn
para predecir una solución en tn + hn+1. En un algoritmo explícito, la expresión (2.3.5)
permite despejar yn+k conocidos los valores 1k0,1,...,j;y jn −=+ .
Para la mayoría de las estructuras reales, las cuales contienen elementos rígidos, se
requiere muy pequeños incrementos de tiempo para obtener una solución estable con
estos algoritmos. Así, todos los métodos explícitos son condicionalmente estables con
respecto al tamaño del incremento de tiempo.
Por poner algún ejemplo de éstos, se pueden citar los métodos de Runge-Kutta
explícitos cuya formulación es la siguiente:
( ) 1-N0,1,...,n h,y,thyy nnnnn1n =Φ+=+ (2.3.8)
Los métodos implícitos tienden a satisfacer la ecuación diferencial en un tiempo tn
después de que la solución en tn - hn+1 haya sido encontrada. A diferencia de los
anteriores, ahora no es posible despejar yn+k de la ecuación (2.3.5) una vez que
conocemos 1k0,1,...,j;y jn −=+ .

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
18
En estos algoritmos es posible usar incrementos de integración grandes, de forma
que pueden ser condicional o incondicionalmente estables.
Como ejemplo, citar el método de Adams implícito de un paso conocido como la
regla de los trapecios y es de la forma:
( ) ( )( )1n1nnnn
n1n y,tfy,tf2
hyy +++ +=− (2.3.9)
• Métodos de paso fijo/métodos de paso variable.
En los de paso fijo, el valor del paso de integración permanece constante a lo largo
de la integración. Es decir htth n1n1n =−= ++ . Todos los algoritmos que se ha
mostrado a modo de ejemplos en los puntos anteriores son de paso fijo.
En los de paso variable, como su propio nombre indica, los intervalos de tiempo
pueden ser distintos en cada paso. Hoy día, el procedimiento que se ha probado como
más eficaz es el de los pares encajados de métodos Runge-Kutta.
La clasificación anterior no es internamente excluyente entre sí como se ha podido
comprobar en los ejemplos propuestos, puesto que tanto los métodos de un paso como
los multipaso pueden ser explícitos o implícitos. Incluso existe la posibilidad de
construir algoritmos que combinen métodos explícitos e implícitos conocidos como
pares predictor-corrector.
En cuanto a la conveniencia de utilizar uno u otro método es preciso determinar la
naturaleza de las ecuaciones diferenciales a resolver (2.3.3) así como la convergencia y
estabilidad del algoritmo.
En nuestro caso las ecuaciones (2.3.3) son lineales y de segundo orden. Según lo
que se recoge en (García Orden [22]), la regla trapezoidal aplicada a un sistema lineal,
es el método de integración incondicionalmente estable más preciso, y además conserva
de forma exacta la energía del sistema.
Este algoritmo equivale a un método β-Newmark con β = ¼ y γ = ½. Es éste el
que se ha utilizado en la resolución de los problemas mostrados en el proyecto.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
19
2.3.2. Familia de métodos de Newmark.
En 1959 Newmark presentó una familia de métodos implícitos y de paso único
para la solución de problemas estructurales dinámicos. Estos métodos han sido
aplicados en muchos análisis dinámicos de estructuras ingenieriles en los últimos
cuarenta años. En el caso que nos concierne la ecuación que se pretende resolver con el
uso de los algoritmos de Newmark es la ecuación de segundo orden (2.2.1).
Utilizando las series de Taylor para el desplazamiento y la velocidad en el instante
tn+1 se obtiene:
....u6
hu2
hu·huu n3
n2
nn1n ++++=+ &&&&&& (2.3.10)
....u2
hu·huu n2
nn1n +++=+ &&&&&&& (2.3.11)
Donde:
h = intervalo de tiempo fijo. ( )n1n tth −= + .
nu = vector de desplazamiento nodal en tiempo tn.
nu& = vector de velocidad nodal en tiempo tn.
nu&&& = vector de aceleración nodal en tiempo tn.
nu&&&& = vector de derivada tercera del desplazamiento nodal en tiempo tn.
1nu + = vector de desplazamiento nodal en tiempo tn+1.
1nu +& = vector de velocidad nodal en tiempo tn+1.
1nu +&& = vector de aceleración nodal en tiempo tn+1.
Newmark truncó las ecuaciones anteriores y las expresó de la siguiente forma:
n3
n2
nn1n uh·u2
hu·huu &&&&&& β+++=+ (2.3.12)

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
20
n2
nn1n uh·u·huu &&&&&&& γ++=+ (2.3.13)
Donde β y γ son parámetros de integración de Newmark.
Si a continuación asumimos que la aceleración es lineal con el paso de tiempo,
podemos escribir la siguiente ecuación:
h
uuu n1n
n&&&&
&&&−
= + (2.3.14)
Sustituyendo la expresión (2.3.14) en las ecuaciones (2.3.12) y (2.3.13) obtenemos
las ecuaciones de Newmark en su forma estándar.
1n2
n2
nn1n uh·uh·21u·huu ++ β+⎟
⎠⎞
⎜⎝⎛ β−++= &&&&& · · (2.3.15)
( ) 1nnn1n u·h·u·h·1uu ++ γ+γ−+= &&&&&& (2.3.16)
El objetivo será la obtención del vector de desplazamiento nodal 1nu + . Para ello
la ecuación de movimiento (2.2.1) es evaluada en el instante tn+1, de forma que
obtenemos:
[ ] [ ] [ ] a1n1n1n FuKuCuM =++ +++ &&& (2.3.17)
Se reordenan las expresiones (2.3.15) y (2.3.16) de la forma siguiente:
( ) n3n2n1n01n u·au·auuau &&&&& −−−= ++ (2.3.18)
1n7n6n1n u·au·auu ++ ++= &&&&&& (2.3.19)
Donde:
20h·1a
β= ;
h·a1 β
γ= ;
h·1a 2 β
=
121a3 −β
= 1a 4 −βγ
= ⎟⎟⎠
⎞⎜⎜⎝
⎛−
βγ
= 22ha5

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
21
( )γ−= 1ha6 h·a7 β=
Notar que la ecuación (2.3.18) puede ser sustituida en la ecuación (2.3.19), de
forma que se obtiene 1nu +&& y 1nu +& en función de la incógnita 1nu + . Sustituyendo
(2.3.18) y (2.3.19) en la ecuación (2.3.17) se obtiene:
[ ] [ ] [ ]( ) [ ]( )
[ ]( )n5n4n1
n3n2n0a
1n10
uauauaC
uauauaMFuKCaMa
&&&
&&&
+++
+++=++ +
(2.3.20)
De la ecuación (2.3.20) se obtiene 1nu + y gracias a las expresiones (2.3.18) y
(2.3.19) obtenemos las velocidades y aceleraciones.
Los parámetros β y γ controlan la estabilidad del método de integración. Así, si el
amortiguamiento es nulo, el algoritmo de Newmark es condicionalmente estable si:
21
≥γ , 21
≤β y β−γω
≤∆
2
1tmax
(2.3.21)
Donde maxω (rad/s) es la máxima frecuencia del sistema estructural dado por la
ecuación (2.2.1).
El método es incondicionalmente estable si:
212 ≥γ≥β (2.3.22)
Sin embargo, si γ es mayor que ½ se introducirán errores en la integración.
Como se ha mencionado en párrafos anteriores, se adoptará para integrar las
ecuaciones dinámicas los valores β = ¼ y γ = ½. Esto se traduce en tomar la
aceleración constante en un intervalo e igual a ( )2
uuu n1n &&&&&&
+=τ + .

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
22
2.3.3. Sensibilidad al paso de integración utilizado.
En la figura 2.1 se compara el desplazamiento vertical que se produce en el centro
de un puente con un único vano de 20 m de luz al paso de una carga de 170 KN que se
desplaza a una velocidad de 100 m/s para distintos incrementos de integración. El
amortiguamiento que se ha tenido en cuenta en la estructura es del 5 %. Los pasos de
tiempo son: h = 0.05 s, h = 0.01 s, h = 0.001 s, h = 0.0001 s y h = 0.00001 s.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
-4
-3
-2
-1
0
1x 10-5
t(s)
uz(m
)
Desplazamiento vertical en el centro del vano de un puente de 20 m
intervalo de integracion =0.05intervalo de integracion =0.01intervalo de integracion =0.001intervalo de integracion =0.0001intervalo de integracion =0.00001
Fig.2.1. Comparación del desplazamiento vertical para distintos intervalos de integración.
Como se puede observar, a medida que se reduce el paso de integración h, los
resultados obtenidos convergen a lo que se podría considerar la solución real. De hecho
las curvas correspondientes a los pasos h = 0.0001 s y h = 0.00001 s son indistinguibles.
Sin embargo, para valores de h relativamente gruesos (h = 0.05 s y h =0.01 s) la curva
que se obtiene difiere bastante de la solución real. Este hecho se debe a que con pasos
de integración tan elevados no se puede caracterizar adecuadamente el comportamiento
dinámico del puente.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
23
Por otro lado, señalar que cuando se utiliza la integración directa del modelo
completo, el paso de tiempo puede utilizarse como filtro de frecuencias. Este es el caso,
por ejemplo, de los programas de elementos finitos que utilizan esta técnica de
integración en el tiempo. En ausencia de mecanismos numéricos que anulen en el
cálculo frecuencias de vibración superiores a una dada, el paso de tiempo ejercerá este
papel.
A continuación se resumen las diversas recomendaciones que, tanto en la
normativa vigente como en la literatura técnica, se proponen sobre el paso de
integración a adoptar para cálculos dinámicos en puentes ferroviarios. (ERRI D214 (a)
[7]), (ERRI D214 (c) [9]) y (Museros et al. [28]):
Determinación del intervalo de integración h en función de la frecuencia de
vibración más alta considerada de la estructura:
max
1 f81h = (2.3.23)
Donde fmax es la frecuencia máxima de la estructura en Hz.
Determinación del paso de integración h en función del número mínimo de
intervalos de tiempo existentes durante el paso de un eje por el vano más
corto de la estructura.
vN
Lh intmin
min2
= (2.3.24)
Donde Lmin es la longitud del vano más corto, v es la velocidad del tren y
intminN es el número mínimo de intervalos de tiempo (En nuestro caso
tomaremos 200).
Determinación del paso de integración h en función del número n de
modos de vibración considerados y la longitud del vano más corto del
puente.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
24
vn4
Lh min
3 = (2.3.25)
Paso de integración fijo h que actúe como filtro de frecuencias superiores a
50 Hz.
s002.0h 4 = (2.3.26)
Las recomendaciones no se limitan a proponer un único paso de integración, sino
que se sugiere la utilización del mínimo de entre los propuestos anteriormente. Así se
puede tomar ( )321 h,h,hminh = , pero no menor que h4.
2.4. Matriz de amortiguamiento.
El amortiguamiento está presente en la mayor parte de los sistemas y debe ser
especificado en un análisis dinámico. A diferencia de la rigidez y la masa, las constantes
que controlan el amortiguamiento no pueden evaluarse de forma sencilla a partir de la
geometría de los elementos estructurales y de las propiedades mecánicas del material.
En un sistema de un grado de libertad, el amortiguamiento es proporcional a la
velocidad.
ucf ientoamortiguam &⋅= (2.4.1)
Al menor valor de c que hace que la estructura separada de su posición de
equilibrio vaya al reposo sin sobreoscilación se le denomina amortiguamiento crítico.
En un sistema de un grado de libertad, el amortiguamiento crítico viene dado por:
ncr m2mk2c ω⋅⋅=⋅⋅= (2.4.2)
Donde k es la rigidez del sistema, m la masa y ωn la frecuencia natural del mismo
Normalmente el amortiguamiento se define con el factor de amortiguamiento ς
que es la relación de c con respecto a su valor crítico.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
25
mk2c
cc
cr ⋅⋅==ς (2.4.3)
En un sistema de N grados de libertad, como es el caso, el amortiguamiento de
dicho sistema viene recogido en la matriz de amortiguamiento [ ]C presente en la
ecuación (2.2.1).
A la hora de definir la matriz [ ]C existen principalmente dos formas:
• Amortiguamiento proporcional o amortiguamiento de Rayleigh.
La matriz de amortiguamiento es definida como combinación lineal de la matriz
de rigidez y de masa, tal y como muestra la expresión siguiente:
[ ] [ ] [ ]KMC δ+α= (2.4.4)
Esta matriz así definida me permite, en un análisis modal, desacoplar el sistema
dado por (2.2.1). Así es posible pasar de un sistema de N grados de libertad a un sistema
de N ecuaciones de un grado de libertad cada una. Para un modo de vibración i, cuya
frecuencia natural es ωi, los parámetros α y δ cumplen la siguiente relación:
2
i
i
ωδ+
ωα
=ς2i (2.4.5)
Donde iς es el factor de amortiguamiento correspondiente al modo de vibración i.
En la mayoría de los problemas estructurales, el coeficiente de amortiguamiento
α, puede ser ignorado; es decir, podemos considerar α = 0. En estos casos se puede
evaluar el valor de δ conociendo iς y ωi mediante la expresión:
i
i ως
=δ2
(2.4.6)
Sólo es posible un valor de δ para un sistema estructural, por tanto se elegirá el
modo de vibración correspondiente a la frecuencia más dominante.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
26
Comentar que en estructuras reales se evalúa el amortiguamiento mediante
medidas experimentales de la estructura objeto del estudio o de otras similares. El
amortiguamiento se puede evaluar para los distintos modos de vibración, si bien, dada la
dificultad de la estimación suele emplearse el mismo para todos los modos. El valor más
típico del amortiguamiento, que está implícito en muchas normas de cálculo, es del 5 %,
siendo este valor el que se utilizará para la mayor parte de los problemas que se estudian
en este proyecto (Aunque también se utilizarán otras tasas de amortiguamiento).
• Amortiguamiento generalizado.
Ahora la matriz de amortiguamiento no tiene porque ser combinación lineal de las
otras dos matrices. En este caso se modifica la ecuación (2.2.1) quedando de la siguiente
forma:
( ) ( ) ( ) ( ) ( ) ⎭
⎬⎫
=−=++
0uMuM)t(FuKuCuM
&&
&&& (2.4.7)
Definiendo:
[ ] [ ] [ ][ ] [ ] ⎟⎟⎠
⎞⎜⎜⎝
⎛=
CMM0
A [ ] [ ] [ ][ ] [ ]⎟⎟⎠
⎞⎜⎜⎝
⎛−=
k00M
B ( ) [ ]( )[ ]⎟⎟⎠
⎞⎜⎜⎝
⎛=
tF0
tQ (2.4.8)
⎟⎟⎠
⎞⎜⎜⎝
⎛=
uu
y&
&&&
⎟⎟⎠⎞
⎜⎜⎝
⎛=
uu
y&
Llegamos a la ecuación:
[ ] [ ] ( ) tQyByA =+& (2.4.9)
Del sistema anterior es posible obtener los autovectores y autovalores y
posteriormente desacoplarlo.
Este tipo de amortiguamiento no lo vamos a utilizar en los modelos propuestos.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
27
2.5. CalculiX: Programa de elementos finitos tridimensional.
2.5.1. Historia del programa
Este programa fue desarrollado por dos ingenieros en sus ratos libres a finales de
1998. Los autores son Guido Dhondt y Klaus Witting. Además, a lo largo de los años
también se vieron involucrados en el proyecto otra serie de personas que aportaron otras
partes esenciales al programa, como son ‘solvers’ matemáticos y códigos que mejoraron
el programa.
El máximo artífice es Guido Dhondt (1961), responsable del código del
programa. Guido Dhondt es un Ingeniero Civil de la Universidad Católica de Louvain
(Leuven, Bélgica) y doctor en Ingeniería Civil en la Universidad de Princeton (U.S.A).
El otro creador es Klaus Wittig, el cuál fue el encargado del pre- y post-
procesador de CalculiX.
Surgiendo en aquel tiempo en que el lenguaje de programación C nació y
FORTRAN era el lenguaje estándar para cálculos ingenieriles, el código de CalculiX
está escrito en una mezcla de C y FORTRAN. Las primeras líneas de dicho código
fueron escritas en otoño de 1998 y estaban fuertemente influenciadas por el programa
FEAP de Zienkiewicz y Taylor. Los primeros intentos del programa sólo tenían
capacidad de resolver problemas estáticos y lineales con elementos tridimensionales de
20 nodos y usando integración reducida. Pronto se convirtió en un programa más
potente, de forma que a finales de 1999 ya tenía incorporado las opciones de análisis en
frecuencia y pandeo, además de la posibilidad de utilizar geometrías no lineales y
materiales con comportamiento no lineal. Posteriormente se introdujeron análisis con
simetría, tanto en vigas como en placas, análisis de transferencia de calor y más
recientemente análisis de estados dinámicos estables.
2.5.2. Descripción del programa
CalculiX es un paquete diseñado para resolver problemas en diferentes campos. El
método utilizado para ello es el método de elementos finitos. Con este programa se
pueden construir, calcular y post-procesar modelos de elementos finitos. Se pueden

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
28
resolver con CalculiX problemas lineales y no lineales así como problemas estáticos,
dinámicos y térmicos.
CalculiX es un programa de software libre y se puede encontrar en
www.calculix.de. Por tanto su código de programación es accesible y modificable por
cualquier persona. El programa es distribuido de forma gratis y a su vez sin ninguna
garantía. Dicho código es una mezcla de subrutinas en FORTRAN y subrutinas en C.
Concretando en las posibilidades del programa, los tipos de análisis que se pueden
realizar son los siguientes:
- Análisis estáticos.
- Análisis en frecuencia.
- Análisis de pandeo.
- Análisis dinámicos (Tanto con método modal como con integración directa).
- Transferencia de calor.
- Acústicos.
- Lubricación hidrodinámica.
- Electrostáticos, etc...
En cuanto a los tipos de elementos, CalculiX está provisto de elementos tipo viga,
elementos lámina, elementos ‘brick’, elementos de tensión plana, elementos de esfuerzo
plano, elementos axisimétricos, elementos fluidos y elementos ‘gap’. De todos ellos
existen diferentes variedades según el número de nodos que posean.
Por otra parte comentar que existen varios tipos de materiales que pueden ser
utilizados, como son materiales elásticos, hiperelásticos, con deformación plástica,…
Además es posible definir el tipo de material personalmente por el usuario.
En relación a los tipos de cargas que se pueden manejar, éstas pueden ser
puntuales, distribuidas, gravitatorias, centrífugas, flujos de calor convectivo,… Además
también pueden ser variables en el tiempo.
Hasta aquí se ha comentado las características generales del programa. De todas
las posibilidades de análisis, a nosotros sólo nos interesa el análisis dinámico con cargas

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
29
transitorias. En concreto, estamos interesados en el análisis dinámico mediante el
método de integración directa de las ecuaciones de movimiento. Señalar que este
programa tiene la posibilidad de realizar análisis implícitos y explícitos. Por defecto, el
método de integración utilizado es el de Newmark clásico (β = ¼ y γ = ½). Además
hay que reseñar que también nos ofrece la posibilidad de definir los parámetros del
amortiguamiento de Rayleigh α y δ .
También hay que decir que CalculiX se provee de ‘solvers’ matemáticos exteriores
e independientes para la resolución de los problemas como son ARPACK, SPOOLES,
SGI y TAU.
Fijándonos en el código del programa, lo conforman 247 subrutinas (sin contar
las de librería), de las cuales 24 de ellas están en lenguaje C y el resto en FORTRAN. La
función principal (ccx_1.3.c) está en C y se encarga de llamar a las demás. Además,
ninguna rutina en FORTRAN puede llamar a una rutina en C, en cambio lo contrario si
es posible. Notar que todos los argumentos son pasados por referencia y no por valor.
La subrutina principal está compuesta básicamente de las siguientes partes:
1. Asignación en memoria de los campos (openfile.f, readinput.c,
allocation.f )
Después, para cada paso:
2. Lectura del dato de entrada (calinput.f).
3. Determinación de la matriz de la estructura (mastruct.c y mastructcs.c)
4. Resolución de las ecuaciones y obtención de resultados.
Centrándonos en el último punto, decir que según el tipo de análisis que se realiza,
así será la subrutina que es llamada en la función principal. Podemos distinguir:
Para análisis estáticos profile.c y prespooles.c (según los solvers
utilizados).
Para análisis dinámicos no-lineales y térmicos nonlingeo.c.
Para análisis en frecuencia arpack.c y arpackcs.c.
Para pandeo arpackbu.c.
Para análisis dinámicos lineales dyna.c.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
30
Para análisis de estados dinámicos estables steadystate.c
A raíz de la información anterior se podría prescindir de las subrutinas profile.c,
prespooles.c, nonlingeo.c, arpack.c, arpackcs.c, arpackbu.c y steadystate.c y todas
aquellas que fueran llamadas en las citadas y que a su vez no lo fuesen en dyna.c.
2.6. FEAPpv: Un programa de elementos finitos. Versión personal.
2.6.1. Descripción del programa.
FEAPpv es la versión limitada del programa comercial FEAP. Al igual que el
anterior, es un programa de software libre y sin garantías del cual disponemos de su
código de programación en www.ce.berkeley.edu/~rlt/feappv. Su creador es Robert L.
Taylor, profesor en la universidad de Berkeley (California) en el Departamento de
Ingeniería Civil y Medioambiental. Dicho programa está fuertemente influenciado por
el libro The Finite Element Method, de Zienkiewicz and R.L. Taylor [34].
Este sistema de análisis computacional fue desarrollado con la intención de:
- Ser un programa de fácil manejo para los principiantes en los elementos
finitos de forma que pudiesen familiarizarse con los diferentes tipos de
elementos y métodos de modelaje.
- Ser utilizado en investigación, y/o aplicaciones que requiriesen frecuentes
modificaciones.
A pesar de ser una versión limitada, es un programa muy completo, sobretodo
desde el punto de vista de la librería de elementos que posee.
El sistema de computación fue desarrollado en un principio para estaciones de
trabajo UNIX y para ordenadores personales (Windows PC). El programa tiene
integrados diferentes módulos que se encargan de recibir los datos de entrada del

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
31
modelo de elementos finitos, la resolución del problema en un amplio rango de
aplicaciones y la presentación de los resultados de forma gráfica y/o numérica.
FEAPpv es capaz de resolver problemas estructurales (estáticos o transitorios), de
transferencia de calor o de mecánica de fluidos, así como muchos otros problemas
modelados por ecuaciones diferenciales. A diferencia que CalculiX, un problema se
resuelve utilizando un ‘command language’ que es un comando que especifica el
algoritmo a utilizar para obtener la solución. El programa está provisto de una cantidad
aceptable de estos comandos. Así por ejemplo, si tengo un sistema de ecuaciones de
segundo orden, como es el caso de un problema estructural transitorio, el usuario
especificará que la estrategia para obtener la solución será mediante la utilización del
método de integración temporal de Newmark.
En cuanto a la librería de elementos, FEAPpv tiene los siguientes:
- ‘Solid’ Elemento ‘brick’ o ladrillo que es usado para resolver
problemas continuos con pequeñas o grandes deformaciones. Existen
elementos 2-D y 3-D y pueden tener diferentes nodos.
- ‘Frame’ Elemento viga. Usado para modelos estructurales con
deformaciones debidas a axil, cortante y flector. Cada elemento tiene dos
nodos y puede ser 2-D o 3-D.
- ‘Truss’ Elemento cable. Es utilizado para aquellos casos en que sólo
hay deformación y fuerza axil.
- ‘Plate’ Elemento lámina. Son usados en modelos estructurales con
conducta de cuerpos planos en los cuales una dimensión es mucho más
pequeña que las otras dos.
- ‘Shell’ Elemento cáscara. Este elemento modela cuerpos curvos cuyo
espesor es menor que las otras dos dimensiones.
- ‘Membrane’ Elemento membrana. Usado para modelos estructurales
con conducta de cuerpos curvos que son delgados y sólo tienen cargas en
el plano.
- ‘Thermal’ Elemento térmico. Este elemento se utiliza para calcular la
temperatura en elementos sólidos o viga.
- ‘User’ Los usuarios pueden añadir elementos propios al programa.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
32
En relación a los tipos de materiales, FEAPpv está provisto de distintos modelos
de materiales como son: materiales elásticos lineales ortotrópicos e isotrópicos,
materiales visco-elásticos, materiales plásticos,…. Reseñar que en este programa el
amortiguamiento de Rayleigh es introducido en la definición de los materiales y sólo se
tiene en cuenta para materiales elásticos lineales.
Al igual que con CalculiX, es posible utilizar cargas puntuales y distribuidas
dependientes del tiempo.
Centrándonos en el análisis transitorio que es el que nos interesa, este programa de
elementos finitos puede utilizar, según sea la naturaleza del sistema de ecuaciones
diferenciales a resolver (orden y linealidad), un método u otro. Así para el caso que nos
concierne, es decir para un sistema de ecuaciones de segundo orden lineales, el método
utilizado es el de Newmark. Por defecto, FEAPpv utiliza β = ¼ y γ = ½.
En cuanto al código de FEAPpv, está formulado netamente en lenguaje
FORTRAN. El número de subrutinas que lo conforman es 414 sin contar las funciones
de librería. La función principal recibe el nombre de feappv.f. Las demás subrutinas
están divididas en varios grupos:
- Subrutinas correspondientes al programa. Es el grupo más general y en él se
engloban todas las rutinas encargadas de realizar todas las operaciones y todos
los algoritmos para los distintos análisis. En este grupo tenemos 228 subrutinas.
- Subrutinas de elementos. Son aquellas en las que se definen los distintos tipos de
elementos y materiales. Tenemos 15 subrutinas en este grupo.
- Subrutinas del usuario. En este grupo están todas las funciones que son objeto
de ser modificadas y utilizadas directamente por los usuarios (49 funciones).
- Subrutinas ‘plot’. Aquellas que permiten presentar datos gráficamente (64
subrutinas).
- Subrutinas Windows/Unix. Son dos grupos diferentes de rutinas, de forma que
las correspondientes a cada uno sirven para el funcionamiento del programa en
un entorno u otro.
- Subrutinas en f77 y f90. Serie de rutinas en FORTRAN 77 y otras en FORTRAN
90.

Descripción de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
33
Por último es interesante comentar que el código de FEAPpv es un código
bastante ‘claro’ y es por este motivo y por su facilidad de modificación, que sea un
programa bastante extendido en las universidades de ingeniería.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
34
3.- Validación de los programas de elementos finitos:
CalculiX y FEAPpv.
3.1. Validación de CalculiX.
En este punto lo que se trata es de verificar la capacidad del programa CalculiX a
la hora de realizar distintos análisis estructurales. Concretamente se realizarán una serie
de problemas estáticos y dinámicos con este programa y con otro programa de
elementos finitos comercial que es ANSYS. Los resultados obtenidos se compararán
entre sí y con la solución teórica de cada uno de los problemas. Con esta serie de tests se
tendrá la certeza de que el programa, del cual no tenemos garantías de antemano y se
desconocen sus posibilidades, es apto para su utilización.
3.1.1. Problemas estáticos.
3.1.1.1. Viga biapoyada con carga vertical en el centro.
El problema en cuestión es el siguiente:
L = 2 m
A
B
C
F = 100 N
b = 0.08 m
h = 0.08 mX
Z
Y
Z
Fig.3.1. Viga biapoyada con carga en el centro.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
35
Datos de la sección de la viga y del material (acero):
46zzyy m 10·41333.3II −== .
A = 6.4 ·10-3 m2.
E = 2.1·1011 N/m2.
ν =0.3.
a. Solución teórica.
La solución teórica del problema se desarrolla en el anexo D. El desplazamiento
en el centro de la viga es el siguiente:
EI48L·F 3
B ↓=δ (3.1.1)
A continuación se sustituyen los datos de nuestro problema en la expresión
anterior:
m10·325.2 5B
−−↓=δ
b. Solución con elementos finitos.
Se ha utilizado, además del programa de elementos finitos CalculiX, el programa
ANSYS, con el fin de comparar los resultados obtenidos con el primero y los obtenidos
con este último. También se compararán con los resultados teóricos.
Señalar que con ANSYS sólo se ha utilizado un tipo de elemento que es el BEAM4.
Este elemento es uniaxial y tiene seis grados de libertad en cada uno de los nodos y está
provisto de tracción, compresión y torsión. En cuanto a CalculiX se han utilizados dos
tipos diferentes de elementos, obteniendo con cada uno de ellos resultados muy
dispares. En concreto son el B32 y el B32R. El B32 es un elemento viga, unidimensional
y cuadrático con tres nodos, tal y como se muestra en la figura siguiente:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
36
n1
n2
t
1
23
Fig.3.6. Elemento viga en CalculiX.
En cada uno de los nodos se define un sistema de coordenadas cartesianas t - n1-
n2, donde t es el vector local y normalizado de la tangente, n1 es el vector normal en la
dirección 1 y n2 es el vector normal en la dirección 2. Las direcciones 1 y 2 son
utilizadas para expandir el elemento B32 en un elemento C3D20 (elemento ‘brick’,
cuadrático, tridimensional con 20 nodos). Este hecho se produce siempre que utilicemos
un elemento viga y es como se muestra a continuación:
1 2 3
1 2
34
5 6
78
9
10
11
12
13
14
15
16
1718
1920
2
1
t
Nodo elemento 3D
Nodo elemento 1D
Fig.3.7. Expansión del elemento viga al elemento ‘brick’.
En cuanto al elemento B32R es similar al anterior con la salvedad de que este
utiliza integración reducida y el B32 no. En este caso la expansión se produce al

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
37
elemento C3D20R que tiene 2x2x2 puntos de integración y el C3D20 tiene 3x3x3
puntos de integración.
A continuación se muestra una tabla con el desplazamiento máximo (δB↓)
obtenido utilizando los diferentes programas y el error relativo:
( ) 100*% teóricaB
teóricaB
obtenidaB
δ
δ−δ=ε (3.1.2)
Elemento Mallado (nº de
elementos) δB↓ (m) ε (%)
Teoría - - -2.32515 · 10-5 -
ANSYS BEAM4 10 -2.3251 · 10-5 0.0022
2 -1.7152 · 10-5 26.23
5 -2.2692 · 10-5 2.41 B32
10 -2.3267 · 10-5 0.067
2 -2.3348 · 10-5 0.415
5 -2.329 · 10-5 0.166
CalculiX
B32R
10 -3.6484 · 10-5 56.91
Tabla.3.2. Resultados de desplazamiento máximo.
Como se puede observar, utilizando el elemento B32, los resultados mejoran
según vaya aumentando el número de elementos de la discretización. En cuanto al
elemento B32R, su comportamiento es idóneo para un número de elementos pequeño
mientras que empeora considerablemente cuando el mallado es muy fino.
Vamos a comparar el desplazamiento en la dirección z a lo largo de toda la viga.
En la siguiente gráfica se muestra dicho desplazamiento utilizando todas las
opciones expuestas anteriormente.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
38
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-2.5
-2
-1.5
-1
-0.5
0x 10-5 Comparacion desplazamientos viga biapoyada con carga vertical en el centro
l(m)
uy(m
)
ANSYSCalculix (2 elementos B32)Calculix (5 elementos B32)Calculix (10 elementos B32)Calculix (2 elementos B32R)Calculix (5 elementos B32R)Calculix (10 elementos B32R)
Fig.3.8. Desplazamiento en dirección z a lo largo de la viga.
Se representan los resultados de CalculiX que más se parecen a los de ANSYS.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-2.5
-2
-1.5
-1
-0.5
0x 10-5 comparacion desplazamientos viga biapoyada con carga vertical en el centro
l(m)
uy(m
)
ANSYSCalculix (10 elementos B32)Calculix (2 elementos B32R)Calculix (5 elementos B32R)
Fig.3.9. Desplazamiento en dirección z a lo largo de la viga.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
39
En la siguiente figura se representa el error relativo entre ANSYS y CalculiX para
cinco elementos B32R que es la que a simple vista más se parece.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4error relativo entre ANSYS y CALCULIX (5 elementos B32R)
l(m)
erro
r (%
)
Fig.3.10. Error relativo entre ANSYS y CalculiX
En conclusión hay que señalar que el elemento B32 (convertido internamente en el
C3D20) es demasiado rígido y al utilizarlo con pocos elementos los resultados no son
bueno, mientras que si utilizamos en su lugar el B32R (convertido internamente en el
C3D20R) con pocos elementos los resultados son mucho mejores.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
40
3.1.1.2 Viga en voladizo con carga vertical en el extremo libre.
El problema en cuestión es el siguiente:
A B
F
b
hX
Z
Y
Z
L
Fig.3.11. Viga en voladizo con carga en el extremo libre.
Datos del problema: Datos de la sección:
L = 2m. A = 6.4 ·10-3 m2.
F = 1000 N. 46zzyy m 10·41333.3II −==
b = 0.08 m.
h = 0.08 m.
Datos del material (acero):
E = 2.1·1011 N/m2.
ν =0.3.
a. Solución teórica.
El desplazamiento teórico en el punto B es el siguiente (anexo D):
EI3
FL v3
B =↓ (3.1.3)
Sustituyendo los datos del problema en la ecuación (3.1.3) se obtiene:
m 10 · 72024.3 v 3B
−−=↓

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
41
b. Solución con elementos finitos.
Se utiliza al igual que en el ejemplo de la viga biapoyada, tanto CalculiX como
ANSYS. Además con ambos programas se ha utilizado los mismos elementos que en el
problema anterior, es decir, con ANSYS el elemento BEAM4 y con CalculiX los
elementos B32 y B32R.
Los resultados que se obtienen se muestran en la tabla siguiente:
Elemento Mallado (nº de
elementos) δB↓ (m) ε (%)
Teoría - - -3.72024 · 10-3 -
ANSYS BEAM4 10 -3.7202 · 10-3 0.0011
2 -3.253 · 10-3 12.56
5 -3.578 · 10-3 3.82
10 -3.658 · 10-3 1.67
15 -3.688 · 10-3 0.867
20 -3.69 · 10-3 0.813
B32
25 -3.703 · 10-3 0.46
2 -2.193 · 10-3 41.05
CalculiX
B32R 5 No converge -
Tabla.3.4. Resultados de desplazamiento máximo.
Se observa de la tabla anterior que el elemento B32 funciona mejor cuanto mayor
sea la discretización utilizada, en cambio el elemento B32R no funciona bien con
ninguna discretización.
Vamos a comparar el desplazamiento vertical a lo largo de toda la vida que se
obtiene con los programas de elementos finitos.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
42
En primer lugar se comparan todas las alternativas mostradas en la tabla 3.4.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0x 10-3 comparacion desplazamientos viga en voladizo con carga vertical en el extremo libre
l(m)
uy(m
)
ANSYSCalculix (2 elementos B32)Calculix (5 elementos B32)Calculix (10 elementos B32)Calculix (15 elementos B32)Calculix (20 elementos B32)Calculix (25 elementos B32)Calculix (2 elementos B32R)
Fig.3.15. Desplazamiento en dirección z a lo largo de la viga.
Quedándonos con las alternativas de CalculiX que más se asemejan a la solución
de ANSYS nos queda la siguiente figura:
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0x 10-3 comparacion desplazamientos viga en voladizo con carga vertical en el extremo libre
l(m)
uy(m
)
ANSYSCalculix (10 elementos B32)Calculix (15 elementos B32)Calculix (20 elementos B32)Calculix (25 elementos B32)
Fig.3.16. Desplazamiento en dirección z a lo largo de la viga.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
43
Como conclusión se puede decir que las soluciones obtenidas con CalculiX y con
ANSYS son muy parecidas a partir de una discretización de 10 elementos siempre que se
utilice el elemento B32.
3.1.2. Problemas dinámicos.
3.1.2.1. Cubo bajo una presión variable en el tiempo.
El ejemplo seleccionado para comparar la potencia de CalculiX ante análisis
dinámicos tales que las cargas sean dependientes del tiempo es el de un cubo cuya cara
superior está sometida a una presión dependiente del tiempo y empotrado en la base de
éste. Además sus caras laterales tendrán impuestas unas condiciones de contorno que se
exponen a continuación. Así el problema será:
x
y
z
t
L
Fig.3.17. Cubo bajo una presión variable en el tiempo.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
44
x
z
t
a
b
Fig.3.18. Cubo bajo una presión variable en el tiempo.
La carga distribuida a la cual está sometida el cubo es multiplicada por la función
de Heaviside (φ (t) ).
t
φ
1
∆t
Fig.3.19. Función de Heaviside.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
45
Datos del problema:
L = 1m.
b = 1 m.
a = 1 m.
t = 10 N/m2.
Datos del material (acero):
E = 2.1·1011 N/m2.
ν = 0.3.
ρ = 7850 kg/m3.
Además el problema tiene las siguientes condiciones de contorno:
6
2
3
4
5
1
Fig.3.20. Numeración de las caras del cubo.
Cara Condición de contorno
1,2,3,4 0t
0uu
z
yx
=
==
5 0
0uuu
zyx
zyx
=θ=θ=θ
===
Tabla.3.5. Condiciones de contorno del problema.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
46
a. Solución teórica.
La solución teórica del problema anterior es la siguiente:
( ) ( ) ( )[ ] ( ) ( )
( ) ( )
⎥⎥⎥⎥⎥
⎦
⎤
⎥⎥⎥⎥⎥
⎦
⎤
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
++−φ
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
++−−
−
⎢⎢⎢⎢⎢
⎣
⎡
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
−+−φ
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
−+−−
ρρ
φ= ∑
=
Ezb·1n·2t·
Ezb·1n·2t
Ezb·1n·2t·
Ezb·1n·2t·1
E·E1·
tu
t,zu 1000
0n
n
est,z
z
(3.1.4)
( ) ( ) ( )[ ] ( ) ( )
⎥⎥⎥⎥⎥
⎦
⎤
⎥⎥⎥⎥⎥
⎦
⎤
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
++−φ+
⎢⎢⎢⎢⎢
⎣
⎡
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ρ
−+−φ−φ=
σσ ∑
= Ezb·1n·2t
Ezb·1n·2t·1·tt,z 1000
0n
n
est,zz
zz (3.1.5)
Donde:
E
t·bA·t·A·E
bF·A·E
bu est,z === (3.1.6)
test,zz =σ (3.1.7)
En nuestro caso la función de Heaviside que utilizaremos tendrá el siguiente
incremento de tiempo:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
47
t(s)
φ
1
0 2e-41e-4 3e-4 4e-4 5e-4 6e-4 7e-4 8e-4 9e-4 10e-4
Fig.3.21. Función de Heaviside del problema.
Se observa que ∆t = 10-4 s.
A continuación se representará el desplazamiento teórico en la cara superior o cara
número 6 (z = b) y la tensión en el empotramiento (z = 0). La representación será
adimensional en ambos casos.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
t(s)
uy/u
yest
Desplazamiento TEORICO de la cara superior
Fig.3.22. Desplazamiento teórico en la cara superior del cubo.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
48
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
t(s)
Szz
/Szz
,est
Tension TEORICA en el empotramiento
Fig.3.23. Tensión teórica en la cara correspondiente al empotramiento.
b. Solución con elementos finitos.
Al igual que en los ejemplos anteriores, se ha utilizado el programa de elementos
ANSYS para la comparación de la solución que proporciona CalculiX.
Con CalculiX se ha utilizado el elemento tridimensional C3D20 y el C3D20R que
ya han sido descritos en los ejemplos anteriores.
1 2
34
5 6
78
9
10
11
12
13
14
15
16
1718
1920
Fig.3.24. Elemento C3D20.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
49
Por otro lado, con ANSYS se ha utilizado el elemento tridimensional SOLID186, el
cual tiene desplazamientos cuadráticos y se comporta bien ante mallados irregulares.
Está constituido por 20 nodos con tres grados de libertad por nodo: translación en las
direcciones x,y,z. Es capaz de soportar plasticidad, hiperelasticidad, creep, grandes
deformaciones y grandes esfuerzos.
Una vez mencionados los tipos de elementos a utilizar, se procede a la
comparación de resultados. En primer lugar los resultados que se obtienen son para una
discretización del cubo en ocho elementos hexaédricos en ambos programas, tal y como
se muestra en la figura.
Fig.3.25. Mallado del cubo utilizado.
En ambos casos se ha utilizado un tamaño de paso de integración constante de
5·10-6 s. El tiempo final que se ha tomado es de 5·10-3 s (con ∆t = 10-4 s) y por tanto el
número de integraciones será 103.
Con estas especificaciones se obtienen los siguientes resultados:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
50
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-10
-8
-6
-4
-2
0
2x 10-11
t(s)
uy(m
)
Comparacion desplazamiento en la cara superior
ANSYSCALCULIXTEORICO
Fig.3.26. Desplazamiento vertical en la cara superior del cubo.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-30
-25
-20
-15
-10
-5
0
5
10
t(s)
Szz
(N/m
2 )
Comparacion tensiones en el empotramientoANSYSCALCULIXTEORICO
Fig.3.27. Tensión en la cara del empotramiento del cubo.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
51
Como se puede observar los resultados de desplazamiento vertical en la cara 6 del
cubo son bastante parecidos a la solución teórica, y a su vez, los resultados obtenidos
con ANSYS y CalculiX también son muy similares. En cuanto a los resultados de las
tensiones en el empotramiento, éstos siguen la tendencia de la tensión teórica, aunque
difieren un poco de la misma. Además, se obtiene que la tensión dada por CalculiX se
asemeja más a la teórica que la obtenida con ANSYS. Estos resultados pueden
considerarse buenos, ya que el problema que estamos estudiando es un problema
complejo que normalmente no da tan buenos resultados experimentales.
Ahora lo que vamos a hacer es disminuir el ∆t con la intención de conseguir
mejores resultados, ya que, teóricamente éstos son mejores cuanto menor es el
incremento de tiempo de la función de Heaviside. Así cogeremos un ∆t = 10-5 s.
Además se podrá ver que estos resultados mejoran cuanto mayor es el número de
elementos en el cual discretizamos el cubo. Utilizaremos en el caso de CalculiX una
discretización de 32 elementos hexaédricos, mientras que con ANSYS el mallado del
volumen será con 100 elementos tetraédricos.
Fig.3.28 Mallado con 32 elementos (CalculiX) Fig.3.29 Mallado con 100 elementos (ANSYS)
Las gráficas que se obtienen son las siguientes:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
52
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-10
-8
-6
-4
-2
0
2x 10-11
t(s)
uy(m
)
Comparacion desplazamiento en la cara superior (INC T = 1e-5)
TEORICOANSYS (8 elementos)ANSYS (100 elementos)CALCULIX (32 elementos)
Fig.3.30. Desplazamiento vertical en la cara superior del cubo.
Como se puede comprobar en la figura anterior los resultados de uy (b,t) obtenidos
con los programas de elementos finitos son muy parecidos entre sí y a su vez más
parecidos a la solución teórica que en el caso anterior. Por otro lado las diferencias son
mínimas entre un mallado y otro.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-30
-25
-20
-15
-10
-5
0
5
10
t(s)
Szz
(N/m
2 )
Comparacion tensiones en el empotramiento(INC T = 1e-5)TEORICOANSYS (8 elementos)ANSYS (100 elementos)CALCULIX (32 elementos)
Fig.3.31. Tensión en la cara del empotramiento del cubo.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
53
En cuanto a las tensiones, se observa que efectivamente se parecen más los
resultados de elementos finitos a los teóricos que con el incremento de tiempo anterior.
En esta gráfica si se puede ver la mejoría existente cuando discretizamos el cubo en más
elementos, ya que la solución proporcionada por ANSYS para ocho elementos
hexaédricos difiere más de la teóricas que la correspondiente a 100 elementos
tetraédricos.
Representamos sólo las soluciones más aproximadas:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-10
-8
-6
-4
-2
0
2x 10-11
t(s)
uy(m
)
Comparacion desplazamiento en la cara superior (INC T = 1e-5)
TEORICOANSYS (100 elementos)CALCULIX (32 elementos)
Fig.3.32. Desplazamiento vertical en la cara superior del cubo.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
54
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10-3
-30
-25
-20
-15
-10
-5
0
5
10
t(s)
Szz
(N/m
2 )
Comparacion tensiones en el empotramiento(INC T = 1e-5) TEORICOANSYS (100 elementos)CALCULIX (32 elementos)
Fig.3.33. Tensión en la cara del empotramiento del cubo.
En conclusión se puede decir que los resultados que se obtienen con CalculiX son
óptimos y que se cumple que cuanto menor sea el ∆t mejor es la solución obtenida.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
55
3.2. Validación de FEAPpv.
Se procede a la verificación de la capacidad del programa FEAPpv a la hora de
resolver distintos problemas estructurales, tanto estáticos como dinámicos. Los
resultados obtenidos se compararán con los de otros programas de elementos finitos
(ANSYS y CalculiX) así como con la solución teórica correspondiente. Se pretende, al
igual que hicimos con el programa CalculiX, ver si FEAPpv nos ofreces las garantías
suficientes para su utilización.
3.2.1. Problemas estáticos.
3.2.1.1. Viga biapoyada con carga vertical en el centro.
El problema en cuestión es el siguiente:
L = 2 m
A B
C
F = 100 N
b = 0.08 m
h = 0.08 mX
Z
Y
Z
Fig.3.34. Viga biapoyada con carga en el centro
Datos de la sección de la viga y del material (acero):
46zzyy m 10·41333.3II −== .
A = 6.4 ·10-3 m2.
E = 2.1·1011 N/m2.
ν =0.3.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
56
El desplazamiento teórico según el eje z en el punto C viene dado por la ecuación
(3.1.1). En cuanto a la solución mediante elementos finitos, se ha utilizado además de
FEAPpv, ANSYS y CalculiX. Centrándonos en el programa objeto de nuestro estudio, se
ha utilizado como elemento los de tipo viga, al igual que con los demás programas.
Concretando más, el elemento recibe el nombre de ‘FRAMe’ y es usado para modelos
estructurales que incluyen deformación debida a axiles, cortantes y flectores. El modelo
del elemento es formulado en términos de fuerzas resultantes que se calculan por
integración de los componentes de las tensiones sobre la sección del elemento. Cada
elemento tiene dos nodos y puede ser utilizado en problemas de dos y tres dimensiones.
Para problemas de dos dimensiones cada nodo tendrá tres grados de libertad (ux ,uy ,θz) y
para problemas de tres dimensiones cada nodo tendrá seis grados de libertad (ux ,uy ,uz
,θx , θy , θz).
A continuación se presenta una tabla en la que se recogen los desplazamientos
según el eje z en el punto C obtenidos por los diferentes programas. Además también se
presenta el error relativo que tiene cada resultado con respecto a la solución teórica
utilizando la ecuación (3.1.2).
Elemento Mallado (nº de
elementos) δB↓ (m) ε (%)
Teoría - - -2.32515 · 10-5 -
ANSYS BEAM4 10 -2.3251 · 10-5 0.0022
FEAPPV FRAMe 10 -2.3252 · 10-5 0.0022
CalculiX B32 10 -2.3267 · 10-5 0.067
Tabla. 3.6. Desplazamiento vertical y error relativo en el punto C de la viga.
Se puede ver que el programa que estamos evaluando ofrece muy buenos
resultados para este problema.
En la siguiente gráfica se recogerá la comparación de los distintos
desplazamientos a lo largo de la viga.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
57
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-2.5
-2
-1.5
-1
-0.5
0x 10-5 comparacion desplazamientos viga biapoyada con carga vertical en el centro
l(m)
uy(m
)ANSYSCalculiXFEAPPV
Fig.3.35.Desplazamiento vertical a lo largo de la viga con distintos programas.
Como se puede observar la solución utilizando el programa FEAPpv y ANSYS son
muy parecidas. En la gráfica siguiente se evalúa el error relativo entre ambos resultados.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10-3 error relativo entre ANSYS y FEAPPV
l(m)
erro
r rel
ativ
o (%
)
Fig.3.36. Error relativo del desplazamiento vertical a lo largo de la viga entre ANSYS y FEAPpv

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
58
Como se puede comprobar el error relativo máximo es aproximadamente un
0.0045 %, un error que se puede considerar insignificante.
3.2.1.2. Viga en voladizo con carga vertical en el extremo libre.
El problema en cuestión es el siguiente:
A B
F
b
hX
Z
Y
Z
L
Fig.3.37. Viga en voladizo con carga en el extremo libre.
Datos del problema:
L = 2m.
F = 1000 N.
b = 0.08 m.
h = 0.08 m.
Datos de la sección:
A = 6.4 ·10-3 m2.
46zzyy m 10·41333.3II −==
Datos del material (acero):
E = 2.1·1011 N/m2.
ν =0.3.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
59
El desplazamiento teórico según la dirección z en el punto B se recoge en la
ecuación (3.1.3). En cuanto a las soluciones con los distintos programas de elementos
finitos se muestra en la tabla siguiente. También se recoge el error relativo utilizando la
ecuación (3.1.2).
Elemento Mallado (nº de
elementos) δB↓ (m) ε (%)
Teoría - - -3.72024 · 10-3 -
ANSYS BEAM4 10 -3.7202 · 10-3 0.0011
FEAPPV FRAMe 10 -3.7203· 10-3 0.0016
CalculiX B32 10 -3.658 · 10-3 1.673
Tabla.3.7. Desplazamiento vertical y error relativo en el punto B de la viga.
De los resultados recogidos en la tabla anterior se puede decir que el programa que
estamos evaluando da muy buenos resultados para el problema de la viga en voladizo y
mejores que los que se obtuvieron con el programa CalculiX.
En las siguientes figuras se mostrarán los desplazamientos verticales obtenidos
con los distintos programas a lo largo de toda la viga. Además también se representa el
error relativo que se obtiene con el programa FEAPpv en relación con la solución
obtenida con ANSYS. Como se puede comprobar el error máximo que se obtiene es
aproximadamente un 0.006 %, siendo este un error insignificante.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
60
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0x 10
-3 comparacion desplazamientos viga en voladizo con carga vertical en el extremo libre
l(m)
uy(m
)ANSYSCalculiXFEAPPV
Fig.3.38. Desplazamiento vertical a lo largo de la viga.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
1
2
3
4
5
6
7x 10
-3 error relativo entre ANSYS y FEAPPV
l(m)
erro
r (%
)
Fig.3.39. Error relativo del desplazamiento vertical a lo largo de la viga entre ANSYS y FEAPpv

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
61
3.2.2. Problemas dinámicos.
En este apartado se resolverán varios problemas dinámicos con cargas
dependientes del tiempo.
3.2.2.1. Viga biempotrada con carga vertical de tipo Heaviside.
El problema en cuestión es el siguiente:
L = 20 m
A B
C
F(t)
b = 1 m
h = 1 mX
Z
Y
Z
Fig.3.40. Viga biempotrada con carga en el centro
Datos de la sección:
A = 1 m2.
4zzyy m 083333.0II ==
Datos del material:
E = 2.1·1011 N/m2.
kg/m 2500=ρ
ν =0.3.
Datos de la carga
)t(·P)t(F Φ=
Donde:
P = 300 KN.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
62
La función de Heaviside es la siguiente:
t(s)
1
0 0.20.1 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 10
φ(t)
Fig.3.41. Función de Heaviside.
A continuación se presentarán los resultados obtenidos. Hay que señalar que en
los correspondientes análisis no se ha tenido en cuenta el amortiguamiento, es decir no
se ha considerado la matriz de amortiguamiento (ecuación 2.4.4).
En primer lugar se representa el desplazamiento según la dirección z en el punto
central de la viga utilizando los tres programas de elementos finitos estudiados.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
63
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-8
-6
-4
-2
0x 10-4
t(s)
uz(m
)
Desplazamiento vertical en el centro de la viga
FEAPPVANSYSCALCULIX
Fig.3.42. Desplazamiento vertical en el centro de la viga.
A continuación se representa la solución de FEAPpv y la solución de ANSYS.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-8
-6
-4
-2
0x 10-4
t(s)
uz(m
)
Desplazamiento vertical en el centro de la viga
FEAPPVANSYS
Fig.3.43. Desplazamiento vertical en el centro de la viga con ANSYS y FEAPpv.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
64
Ahora se presentarán los resultados que se obtiene teniendo en cuenta la matriz de
amortiguamiento. Señalar que la matriz de amortiguamiento que se ha utilizado es la
correspondiente al amortiguamiento proporcional o amortiguamiento de Raleigh
(ecuación 2.4.4).
Para el cálculo de los coeficientes de Raleigh se ha tomado el coeficiente α = 0 y
se ha calculado δ teniendo en cuenta únicamente el primer modo de vibración cuya
frecuencia natural es la dominante para el tipo de carga que tenemos. Por otro lado se ha
tomado como tasa de amortiguamiento modal ξi = 5% para el primer modo.
Se procede al cálculo de las frecuencias naturales de los modos para la obtención
del parámetro δ.
La siguiente expresión me permite el cálculo de las frecuencias naturales de una
viga para distintas configuraciones:
4iiLEIAµ
=ω (3.2.1)
Donde:
Ai ≡ Valor que depende de la configuración de la viga y del modo.
E ≡ Módulo de Young.
I ≡ Momento de inercia de la sección.
L ≡ Longitud de la viga.
µ ≡ Densidad lineal de la viga.
Los valores de Ai para el caso de una viga biempotrada se muestran en la tabla
siguiente:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
65
Modo de vibración Ai
22.4
61.7
121.0
200.0
Tabla.3.8. Valores de Ai para una viga biempotrada.
Sustituyendo los datos del problema en la expresión (3.2.1) se obtienen las
siguientes frecuencias naturales:
s/rad 88.1322rad/s 800.34 rad/s 408.11 rad/s 16.148
4
3
2
1
=ω=ω=ω=ω
Centrándonos en la frecuencia natural del primer modo y utilizando la ecuación
(2.4.6), obtenemos que el coeficiente de Rayleigh δ es aproximadamente 0.0007.
Con este valor se puede obtener las tasas de amortiguamiento de los demás modos
de vibración, de forma que se obtiene:
%0.28%3.14
%5
3
2
1
=ξ=ξ=ξ
Como es lógico las tasas de amortiguamiento son mayores mientras mayor sea el
modo. Se puede comprobar que los amortiguamientos que se obtienen para los demás
modos no son valores demasiado elevados.
Una vez que tenemos definida la matriz de amortiguamiento se procede a la
resolución del problema y a la exposición de los resultados en las siguientes gráficas.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
66
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-8
-6
-4
-2
0x 10-4 Desplazamiento vertical en el centro de la viga
t(s)
uz(m
)ANSYSFEAPPV
Fig.3.44. Desplazamiento vertical en el centro de la viga con ANSYS y FEAPpv. (con amort.)
Se observa que ambas soluciones son muy similares. Para corroborar esta
afirmación se presenta el error relativo entre ambas.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45Error relativo entre ANSYS Y FEAPPV
t(s)
Erro
r rel
ativ
o (%
)
Fig.3.45. Error relativo de desplazamiento vertical en el centro de la viga entre ANSYS y FEAPpv.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
67
El error relativo máximo se produce cerca del instante en el cuál la carga pasa de
tener un valor nulo a tener un valor P, es decir para t =0.5 s y su valor es de 0.42 %.
3.2.2.2. Viga biempotrada con carga vertical transitoria.
El problema es el mismo que el anterior problema cambiando únicamente el tipo
de carga.
L = 20 m
A B
C
F(t)
b = 1 m
h = 1 mX
Z
Y
Z
Fig.3.46. Viga biempotrada con carga en el centro.
La carga será la siguiente:
)t(·P)t(F Φ=
Donde:
P = 300 KN.
t0
INC
1
φ(t)
Fig.3.47. Función φ(t).
INC = 0.2778 s

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
68
En la figura siguiente se esquematiza la función φ(t) como en realidad se
considera a la hora de introducirla en los programas de elementos finitos.
t0
1
φ(t)
delta
INC Fig.3.48. Esquematización real de φ(t).
En nuestro caso se ha tomado delta = 0.05556 s. Se muestra a continuación una
tabla en la que se recoge todos los puntos que forman la función φ(t).
t (s) 0 0.05556 0.11112 0.16668 0.22224 0.2778 0.33336 0.38892 0.4448
φ(t) 1 0 0 0 0 1 0 0 0
t(s) 0.50004 0.5556 0.61116 0.66672 0.72228 0.77784 0.8334 0.88896 0.94452
φ(t) 0 1 0 0 0 0 1 0 0
t(s) 1.00008 1.05564 1.1112 1.6676 1.22232 1.27788 1.33344 1.389 1.44456
φ(t) 0 0 1 0 0 0 0 1 0
t(s) 1.50012 1.55568 1.61124 1.6668 1.72236 1.77792 1.83348 1.88904 1.9446
φ(t) 0 0 0 1 0 0 0 0 1
t(s) 2.00016 5
φ(t) 0 0
Tabla.3.9. Puntos de la función φ(t).
En primer lugar se realizarán los análisis con los tres programas y sin tener en
cuenta la matriz de amortiguamiento, al igual que se hizo en el problema 3.2.2.1. De
esta forma los resultados son:

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
69
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
t(s)
uz(m
)
Desplazamiento vertical en el centro de la viga
FEAPPVCALCULIXANSYS
Fig.3.49. Desplazamiento vertical en el centro de la viga.
En la figura anterior se puede ver como los resultados de CalculiX difieren en
mayor medida de los otros dos. Representando las soluciones de ANSYS y FEAPpv, se
obtiene:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1.5
-1
-0.5
0
0.5
1x 10-3
t(s)
uz(m
)
Desplazamiento vertical en el centro de la viga
FEAPPVANSYS
Fig.3.50. Desplazamiento vertical en el centro de la viga con ANSYS y FEAPpv.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
70
Seguidamente se presentarán el desplazamiento vertical que se obtiene teniendo en
cuenta la matriz de amortiguamiento. Al igual que en el apartado anterior se utiliza el
amortiguamiento de Raleigh y los coeficientes α y δ son los mismos que antes.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-8
-6
-4
-2
0
2
4x 10-4 Desplazamiento vertical en el centro de la viga
t(s)
uz(m
)
ANSYSFEAPPV
Fig.3.51. Desplazamiento vertical en el centro de la viga con ANSYS y FEAPpv. (con amort.)
Haciendo un zoom en la gráfica anterior.
0 0.5 1 1.5 2 2.5-8
-6
-4
-2
0
2
4x 10-4 Desplazamiento vertical en el centro de la viga
t(s)
uz(m
)
ANSYSFEAPPV
Fig.3.52. Zoom gráfica 3.51.

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
71
Como podemos comprobar de las gráficas anteriores los resultados son
prácticamente iguales cuando se considera el amortiguamiento. Para corroborar esta
afirmación se presenta el error absoluto entre los resultados correspondientes a ambos
programas.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
-3 Error absoluto entre ANSYS Y FEAPPV
t(s)
Erro
r abs
olut
o (%
)
Fig.3.51. Error absoluto del desplazamiento vertical entre ANSYS y FEAPpv.
3.3. Elección del programa.
Con el objeto de servir a un futuro acoplamiento con programas de elementos de
contorno, como ya se comentó en apartados anteriores, se elige como programa más
idóneo para la causa el programa FEAPpv. Las razones son las siguientes:
- La primera razón y más obvia es que, como se puede observar en los
resultados anteriores, el programa FEAPpv ofrece mejores resultados que
CalculiX, tanto en problemas estáticos como en problemas dinámicos.
(comparando ambos con ANSYS).

Validación de los programas de elementos finitos: CalculiX y FEAPpv Proyecto Fin de Carrera
72
- Otra razón muy importante es que el programa FEAPpv tiene un código de
programación mucho más claro que CalculiX, cuyo principal inconveniente es
que su código está escrito en dos lenguajes de programación diferentes. Este
hecho provoca una mayor dificultad de compresión y sobretodo una gran
complejidad en su compilación, que se ve agravada con la existencia de
‘solvers’ independientes.
- Por otra parte, debido a la claridad del programa elegido, es más fácil realizar
las modificaciones oportunas en el código que en el programa desechado.
- Además los archivos de entrada de FEAPpv son más sencillos de programar
que los de CalculiX, así como más claros. Es decir, es más fácil, en líneas
generales, utilizar el primero que el segundo.
- En cuanto al coste computacional, decir que en los ejemplos presentados y en
otros problemas de prueba, el programa elegido se ha mostrado más rápido en
la resolución de los mismos que el programa desechado.
- FEAPpv nos ofrece unos archivos de ayuda más amplios y comprensibles que
los ofrecidos por CalculiX.
- El programa CalculiX está más dirigido a análisis relacionados con la
mecánica y dinámica de fluidos, mientras que FEAPpv está más dirigido a
problemas estructurales. Así por ejemplo, el primero ofrece muchas
posibilidades de análisis térmicos, hidrodinámicos, de transferencia de calor,
etc. En cambio ofrece carencias en cuanto a la introducción de
amortiguamiento así como tipos de elementos y formas de mallado. Estos
campos son ampliamente satisfechos con FEAPpv.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
73
4. La resonancia en los puentes de ferrocarril y los
métodos de cálculo dinámico utilizados.
4.1. Normativa actual. Las normas existentes hasta ahora ([26], [32] y [33]) para el cálculo de puentes
ferroviarios tienen en cuenta la respuesta dinámica a través de un coeficiente de
impacto, que representa el aumento de la respuesta dinámica respecto a la estática para
una única carga móvil. Este coeficiente se denota por Φ y además de recoger los
efectos dinámicos propios de la carga móvil, también recoge los efectos producidos por
las irregularidades del carril. Así, el coeficiente de impacto se calculará al final como la
envolvente
( )ϕ ′′+ϕ′+=Φ 1máx (4.1.1)
Donde ϕ′ es el incremento debido al efecto dinámico en una estructura ideal
(adquiere un valor máximo de ϕ′= 1.39 para una vía recta ideal) y ϕ ′′ es el incremento
producido por las irregularidades del carril.
El valor de 1+ϕ′ se obtiene directamente a partir de los cálculos dinámicos como
relación entre la máxima flecha dinámica producida por una carga móvil y la flecha
estática real (Esta flecha se puede calcular haciendo circular la carga a una velocidad
suficientemente baja). Por otra parte, el valor de ϕ ′′ se obtiene de una expresión
propuesta en la norma UIC [32].
La consideración del coeficiente de impacto Φ así definido, es suficiente para
tener en cuenta el efecto dinámico de una única carga móvil, pero no tiene en cuenta la
posible resonancia que se produciría por la repetición cíclica de cargas. Hasta la
aparición de la alta velocidad esto no era un problema, ya que las frecuencias de
vibración y las distancias entre ejes de las composiciones circulantes que se utilizan,
posibilitaban que la resonancia no se diera en la práctica. Pero ahora, con velocidades
por encima de los 200 km/h y para las distancias entre ejes de los trenes reales, es
posible la aparición de efectos resonantes.
Por tanto los efectos resonantes han permanecido ausentes hasta el momento en
las normas de cálculo, aunque se está intentado paliar este fenómeno con la aparición de

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
74
nuevas instrucciones de cálculo como son la Italiana [17], el nuevo borrador del
Eurocódigo 1 [14] y el nuevo borrador Español [25].
Las expresiones generales contenidas en las normas para el cálculo del coeficiente
de impacto pretenden ofrecer fórmulas sencillas que tengan el carácter de envolvente
para los rangos de velocidades, frecuencias de las estructuras y tipos de trenes
considerados. A continuación se resumen la metodología simplificada de dicho
coeficiente en la normativa europea.
4.1.1. Ficha UIC-776-I R [32]
Es el documento origen y referencia del resto de las normativas. Según la misma,
los efectos dinámicos se valorarán aplicando un coeficiente de impacto Φ a los efectos
producidos por el tren de cargas estático denominado LM 71 – Load model 71, recogido
en (UIC Code 702 – O [31]). En la figura 4.1 Se recoge la definición de este tren de
cargas. Para una sola vía queda definido por:
- Cuatro cargas centrales que representa cuatro ejes y cuyo valor es de 250 KN.
Estarán dispuestas en el eje de la vía, separadas entre sí 1.6 m y en la posición
más desfavorable para el elemento en estudio.
- Una sobrecarga uniformemente repartida de valor 80 KN/m, extendida en la
longitud y posición que sea más desfavorable.
80 KN/m 80 KN/m
250 KN 250 KN 250 KN 250 KN
indefinido indefinido0.8 m 1.6 m 1.6 m 1.6 m 0.8 m
Fig.4.1. Tren tipo estático LM 71.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
75
El coeficiente de impacto, en vías con grado de mantenimiento bueno, para
cálculo de momentos flectores, es:
1 ;82.02.0L
44.122 ≥Φ+
−=Φ
Φ
(4.1.2)
La luz equivalente LΦ coincide con la real en un elemento isostático biapoyado, y
se da una tabla de equivalencias para otros tipos estructurales.
Este coeficiente de impacto se aplica multiplicando a los valores estáticos de las
solicitaciones obtenidas con el tren LM 71:
real,dintipoest, · δ≥δΦ (4.1.3)
Donde:
- tipo,estδ : Flecha máxima para el tren tipo LM 71.
- real,dinδ : Flecha máxima del puente para el tren de cargas real en el rango de
velocidades de circulación.
La expresión (4.1.2) resulta de obtener una envolvente dinámica para todos los
trenes reales. La interpretación de esta envolvente es como sigue.
Se cumple que: ( ) realest, realdin, · 1 δϕ ′′+ϕ′+=δ (4.1.4)
Entonces: ( ) realest, tipoest, · 1 · δϕ′′+ϕ′+≥δΦ (4.1.5)
Donde:
- real,estδ : Flecha máxima del puente para el tren de cargas real cuando se considera
estático.
Es importante observar que, el coeficiente de impacto Φ se aplica a las
solicitaciones obtenidas por el tren tipo, mientras que los factores ( ) 1 ϕ ′′+ϕ′+ se
aplican a los trenes reales, normalmente bastante menos pesados que el tren tipo. El
valor que la norma considera para estos coeficientes es el siguiente:

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
76
0
4 fL2vK;
KK1K
Φ
=+−
=ϕ′ (4.1.6)
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎟⎠
⎞⎜⎝
⎛ −+=ϕ ′′⎟⎠⎞
⎜⎝⎛−
Φ⎟⎠⎞
⎜⎝⎛− ΦΦ
22
20L
010L
e180L·f
50.0e56.0a (4.1.7)
Donde:
- ⎟⎠⎞
⎜⎝⎛= 1,
22vmína , estando la velocidad v expresada en m/s.
- f0 : Frecuencia fundamental a flexión del puente [Hz].
La aplicación del coeficiente de impacto está sujeta a algunas restricciones, con
objeto de que responda a las situaciones reales de puentes y trenes para las que fue
formulado y comprobada su validez. En concreto, la frecuencia fundamental del puente
debe estar contenida en un huso definido en relación con la luz del puente, en la figura
4.2.
Fig.4.2. Límites de la frecuencia natural f0 en Hz en función de la luz del elemento.
El coeficiente de impacto así definido no tiene en cuenta efectos resonantes. Para
evitar esta posibilidad, la mayor parte de las instrucciones limitan su uso para v ≤ 200
km/h.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
77
4.1.2. Instrucción IAPF-75 [26]
La norma española IAPF-75 define un “incremento dinámico”, expresado en tanto
por ciento, para el cual prescribe los valores siguientes, en tableros isostáticos:
⎪⎩
⎪⎨
⎧
≥+−
<=
m; 6 L luzLL76.110.3
L114
m; 6 L luz v · 33.0I
(4.1.8)
En esta expresión v es la velocidad del tren en km/h. El incremento dinámico
anterior da lugar a un coeficiente de impacto ( )100I1+=Φ que se aplica a las
solicitaciones estáticas definidas por unos trenes tipo específicos, denominados “tren
tipo A” y “tren tipo B”, que incluyen cargas puntuales de 30 t y sobrecargas repartidas
de hasta 12 t/m.
Para tramos continuos la expresión propuesta es
2L
T · v;-1
65I 2 =µµ+µ
µ= (4.1.9)
siendo T el periodo fundamental de vibración, y debiendo expresarse la velocidad
v para esta fórmula en m/s.
El rango de aplicación de este coeficiente es para v ≤ 200 km/h.
Como se ha visto en la normativa actual, el método del coeficiente de impacto, en
contrapartida a su sencillez, tiene una serie de limitaciones. La principal de ellas es que,
al no considerar la resonancia, no es válido para velocidades altas. En estas
circunstancias puede realizarse un cálculo dinámico con cargas móviles, de forma que
estos métodos se basan en la integración en el tiempo de las ecuaciones dinámicas de la
estructura, sometida a una serie de cargas móviles de valores dados.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
78
4.2. Efectos resonantes.
Los fenómenos dinámicos que se producen en los puentes de ferrocarril se deben,
fundamentalmente a las cargas verticales móviles correspondientes a cada eje del
vehículo ferroviario. Estos ejes se encuentran a unas determinadas distancias a lo largo
de la longitud del tren. Así, a una velocidad constante de circulación, las cargas
espaciadas y móviles pueden convertirse en excitaciones periódicas. Por ello, además
del efecto dinámico inherente al paso de cargas por un puente, es posible añadir otros
efectos producidos por la entrada periódica de las cargas. A estos efectos se les conoce
con el nombre de efectos resonantes y suelen producir un incremento en las
deformaciones y esfuerzos soportados por las estructuras.
Para valorar la importancia de la resonancia en las estructuras, se presenta a
continuación un ejemplo donde se recogen los efectos producidos en un puente
isostático de 15 metros de longitud ante el paso de una carga móvil aislada y un tren de
cargas móviles.
El puente en cuestión se modelará como se presenta en la siguiente figura y tiene
las siguientes propiedades que se proponen en (ERRI D214 (a) [7]):
L = 15 m
A BCX
Y
Fig.4.3. Modelo del puente isostático de 15 metros de longitud.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
79
Tablero
EIzz (N·m2) 7694081·103
Área (m2) 6
f0 (Hz) 5
E(N/m2) 29·109
ν 0.2
ϕ (Kg/m3) 2500
Tabla 4.1. Propiedades del puente isostático de 15 m.
En cuanto a la carga, se supondrá una carga de 195000 N con una velocidad de
288 km/h. Además se ha considerado una tasa de amortiguamiento estructural de
%2=ς .
4.2.1. Cálculo de la respuesta estática.
Vamos a comparar los efectos dinámicos que se producen en el punto central del
puente. Por ello es necesario obtener la flecha estática que se produce en este punto de
la estructura cuando hay aplicada una fuerza estática F = 195000 N. Dicho análisis se
realizará con el programa de elementos finitos FEAPpv.
EI48L·F 3
Cmax,est =δ=δ (4.2.1)
m 10 · 78.1 3max,est
−=δ
Fig.4.4. Carga estática aislada aplicada sobre el puente de 15 m.
4.2.2. Respuesta dinámica ante una carga móvil aislada.
Considerando una única carga móvil que se mueve a una velocidad v = 288 km/h
a lo largo del puente, se obtiene el siguiente desplazamiento vertical.
F=195 KN
A BC
X
Y

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
80
Fv
Fig.4.5. Carga aislada móvil sobre el puente de 15 m.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-3
-2
-1
0
1
2
3x 10-3
t(s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
Fig.4.6. Desplazamiento vertical en el centro del vano del puente isostático de 15 m para carga aislada
(v = 288 km/h)
El desplazamiento máximo de la respuesta a lo largo del tiempo es:
m10 · 2.979- -3max,aislargc =δ
4.2.3. Respuesta dinámica producida por un tren de cargas móviles.
Se considera ahora el efecto de un tren formado por diez cargas puntuales de igual
valor que la estudiada en el apartado anterior (F = 195000 N). Estas cargas están
separadas unas de otras 16 metros, representando esta distancia la separación efectiva
entre los ejes de distintos vagones de este tren ideal. Señalar que la distancia entre

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
81
cargas es superior a la longitud del puente, por tanto nunca se encontrarán
simultáneamente actuando dos fuerzas sobre el puente. Esto permitirá que la flecha
estática correspondiente a este caso sea la misma que la del caso anterior.
vF
vF
v
1616
F
Fig.4.7. Separación entre cargas móviles.
La respuesta que se obtiene es la siguiente:
0 1 2 3 4 5 6 7-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
Fig.4.8. Desplazamiento vertical en el centro del vano del puente isostático de 15 m para el tren de cargas
(v = 288 km/h).
Donde la flecha máxima en este caso es:
m10 · 1.5376- 2max,carga tren
−=δ

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
82
4.2.4. Coeficientes de impacto.
Como se puede comprobar de los apartados anteriores, si consideramos un tren de
cargas la flecha máxima resulta mayor que al considerar sólo una carga aislada. Esta
conclusión se puede sacar a raíz del cálculo del coeficiente de impacto Φ en ambos
casos. Dicho coeficiente se definirá como la relación entre la correspondiente flecha
dinámica y la flecha estática, no teniéndose en cuenta con esta definición las
irregularidades que pueda presentar el carril. Los resultados se muestran en el cuadro
siguiente:
CARGA AISLADA TREN DE CARGAS
Flecha estática - 0.00178 - 0.00178
Flecha dinámica máxima - 0.00298 - 0.01538
Coeficiente de impacto Φ 1.67 8.64
Tabla 4.2. Flecha estática y dinámica y coeficiente de impacto.
En la figura siguiente se recogen ambas respuestas:
0 1 2 3 4 5 6 7-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
Tren de cargasCarga aislada
Fig.4.9. Comparación de la respuesta mediante carga aislada y tren de cargas.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
83
A raíz de los resultados expuestos anteriormente se prueba que, a diferencia de lo
que viene recogido en la norma, los efectos dinámicos son más perjudiciales para la
estructura al considerar una serie de cargas móviles que al considerar una única carga
móvil aislada. Es posible comprobar que en el caso del tren de cargas, las solicitaciones
dinámicas superan en más de un 750 % a las esperables con un planteamiento estático.
Se puede concluir con que en el ejemplo que se ha presentado en este apartado se
producen claramente efectos resonantes para la velocidad estudiada.
Señalar que el ejemplo anterior se puede encontrar de forma más detallada en
(Dinámica de puente de ferrocarril para alta velocidad, J. Domínguez [4]).
4.3. Riesgo de resonancia.
Una vez que se han observado los posibles efectos que produce la resonancia, se
procede a un estudio más detallado de los factores más influyentes en este fenómeno.
Atendiendo a la relación entre la velocidad de paso y el espaciamiento entre cargas
de una composición, se puede afirmar que existirá riesgo de resonancia para aquellas
velocidades que cumplan:
..1,2,3,....i i
dfv k
0== (4.3.1)
Donde:
- dk es el espaciamiento regular de los trenes. Ver apartado 4.6 y cuadro 4.3
- v es la velocidad de paso que puede crear efectos resonantes. La velocidad
máxima de proyecto V será la que fije el límite superior de las velocidades
con riesgo de producir resonancia.
- f0 (Hz) es la frecuencia fundamental del puente. Para puentes isostáticos
esta frecuencia corresponde a la primera frecuencia propia. Para puentes
hiperestáticos, la frecuencia del modo de vibración de mayor participación
en la respuesta total de la estructura.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
84
Normalmente, para estructuras hiperestáticas, no se puede realizar un cálculo
dinámico reduciendo el comportamiento a un único modo de vibración. De
acuerdo a (ERRI D214 (e) [11]), la respuesta total para este tipo de puentes viene
caracterizada por la contribución de aquellos modos de vibración que cumplen fi
≤ 20 Hz, siendo fi la frecuencia de vibración del modo i.
La ecuación (4.3.1) es la relación que debe existir entre v, dk y f0 para que se
acoplen los efectos dinámicos producidos por el paso de los sucesivos ejes.
En el ejemplo anterior se eligió v = 288 km/h porque esta velocidad cumplía la
relación (4.3.1):
v = 288 km/h = 80 m/s
dk = 16 m.
f0 = f1 (primer modo de vibración) = 5 Hz.
Se cumple que: 1
165
80=
En la figura 4.10 se observa la evolución del desplazamiento en el centro del vano,
en función del tiempo, para dos velocidades de circulación del tren de cargas (288 y 360
km/h). En el primer caso se puede apreciar un fenómeno de resonancia clásico; los
efectos dinámicos producidos por el paso de un eje se acoplan a los producidos por el
anterior, amplificando la respuesta total del sistema. En el segundo caso no se observa
efectos de resonancia.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
v = 288 Km/hv = 360 Km/h
Fig.4.10. Comparación del desplazamiento en el centro del vano para v = 288 km/h y v = 360 km/h.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
85
Por otro lado, señalar que la resonancia no depende únicamente de los factores
anteriores sino de muchos otros. Destacar la influencia del amortiguamiento estructural
en los efectos resonantes, de forma que la respuesta puede variar considerablemente al
considerar una tasa de amortiguamiento u otra.
4.4. Modelos de cargas puntuales.
Los vehículos ferroviarios se modelarán como estructuras infinitamente rígidas
que no interaccionan con la estructura. De esta manera las cargas por eje de los modelos
de cálculo están determinadas por un valor constante igual al nominal que corresponde
al tren parado.
A estos modelos de trenes se les llama modelos de cargas puntuales y en ellos
también se ha despreciado los efectos asociados a la flexibilidad del carril, las traviesas
y el balasto.
Por tanto un ferrocarril se modelará como una serie de cargas puntuales que
recorren la estructura a una velocidad dada.
F1F2F3F4F5F6F7F8F9F10v
Fig.4.11. Esquematización de un ferrocarril mediante cargas puntuales en cada eje.
Para modelar el tránsito de una carga puntual a lo largo del puente, se utilizará la
metodología de los escalones de carga. Dichos escalones se definen siguiendo los pasos
siguientes:
1) Se localizan los nodos que se encuentran a lo largo de la trayectoria que
recorre la carga.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
86
Fi
v
Nodo 1 Nodo 2 Nodo 3
Fig.4.12. Nodos pertenecientes a la discretización del tablero.
2) Conocida la velocidad v de la carga y definido un tiempo de referencia t0,
origen del movimiento, se determinan los sucesivos tiempos en que la
carga llega a cada uno de los nodos (ti).
Fi
v
Nodo 1 Nodo 2 Nodo 3
Tiempo t = t1
Fi
Nodo 1 Nodo 2 Nodo 3
Tiempo t = t2
Fi
Nodo 1 Nodo 2 Nodo 3
Tiempo t = t3
v
v
Fig.4.13. Esquematización de los tiempos en los que la carga pasa por cada nodo.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
87
3) Se define para cada nodo un escalón de carga en función de la velocidad
v, de los tiempos de llegada ti y de la distancia entre nodos. Definido tal
y como muestra en la figura 4.14, lo que se hace es asociar a cada nodo,
para un instante dado, la carga puntual cuando actúa sobre él o una parte
proporcional de la misma cuando está entre dos nodos.
t
Fi
F1(t)
Carga F1(t) en Nodo 1
t1 t2 t3 t4 t5t
Fi
F2(t)
Carga F2(t) en Nodo 2
t1 t2 t3 t4 t5
t
Fi
F3(t)
Carga F3(t) en Nodo 3
t1 t2 t3 t4 t5
Fig.4.14. Definición de los escalones de carga para cada instante t.
Este será el modelo que se utilizará en la mayor parte de los problemas estudiados
para obtener la respuesta dinámica de una carga móvil aislada. Una vez que la anterior
es conocida, la respuesta de un tren de cargas se obtiene como la superposición de las
respuestas a cargas puntuales Fi. Nótese que la solución de una única carga se realizará
con los programas de elementos finitos mientras que la superposición se llevará a cabo
mediante un programa en FORTRAN (Anexo C) obtenido del Trabajo de Investigación
Tutelado [21].

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
88
F1F2F3F4F5F6 v
0
d2dk
Fk
Fig.4.15. Superposición de las cargas correspondientes a cada eje.
4.5. Modelo de cargas puntuales teniendo en cuenta la deflexión de
la vía, las traviesas y la flexibilidad del balasto.
En este punto vamos a tener en cuenta la existencia de traviesas y balasto entre la
vía y la estructura. Se considerará una vía recta perfectamente soldada con una distancia
entre traviesas d.
d
Vía
Traviesa
Balasto
Estructura
Fig.4.16. Esquematización de la vía, traviesas y balasto.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
89
Cada eje de rueda genera una presión sobre la vía dando lugar a una deflexión de
la misma. Estas deflexiones producirán un movimiento ondulatorio a lo largo de la vía
desplazándose con velocidad v, y una distribución de la carga del eje sobre todas las
traviesas incluidas en la distancia de deflexión. Este hecho se esquematiza en la figura
siguiente.
vFi
Fig.4.17. Deflexión de la vía ante una carga.
Cada traviesa actúa como una fuerza vertical aplicada sobre la estructura durante
el tiempo necesario para que una curva de deflexión pase a través de la traviesa. Este
hecho provoca que al pasar el tren se generen vibraciones. Además cada traviesa puede
ser considerada como una carga vertical puntual.
El cálculo de la curva de deflexión mostrada en la 4.7 se puede realizar mediante
un cálculo cuasi-estático o con un cálculo dinámico. Una vez que se tiene la curva se
procederá a la obtención de la fuerza aplicada a la estructura por una traviesa.
4.5.1. Hipótesis y simplificaciones en el cálculo de la curva de deflexión.
- Se ha considerado el balasto como un semiespacio elástico el cuál se ha
modelado mediante un conjunto de muelles de rigidez α. Por tanto el modelo
que se contempla es aquel en el que el contacto entre vía y suelo es lineal y
continuo. Nótese que existe una carga crítica Tcr, tal que si Fi > Tcr el modelo

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
90
anterior no es válido. Sin embargo para los trenes de pasajeros actuales
siempre se cumple Fi < Tcr.
- No se ha tenido en cuenta la masa adicional que genera un estrato de balasto,
la cuál puede motivar un aumento de las cargas críticas del eje.
- Tampoco se ha tenido en cuenta para los cálculos la masa del suelo
(estructura) y por tanto estamos despreciando su inercia y el amortiguamiento
del mismo. Esto implica mayores desplazamientos en la estructura.
- No se ha considerado el caso en el que la velocidad de propagación de onda en
la vía es próxima o igual a la velocidad de onda de Rayleigh en la estructura
CR, ya que de otra forma se produciría un acoplamiento entre ambos sistemas,
y la determinación de las fuerzas dinámicas aplicadas sobre el suelo usando
cálculos basados únicamente en la propagación de ondas en la vía no es válido.
4.5.2. Cálculo cuasi-estático de la curva de deflexión de la vía.
Normalmente la distancia de deflexión de la vía es mucho mayor que la distancia
entre traviesas. Es por ello por lo que se considerará una vía, formada por dos raíles
paralelos sujetados periódicamente por traviesa, como una viga elástica de Euler-
Bernoulli de peso uniforme gmp 0= sobre un semiespacio elástico. Se supone que 0m
es la masa de raíles y traviesas.
La expresión que nos permite resolver el problema en la ecuación de una viga
elástica en la que se ha modelado la respuesta de un semiespacio elástico como una
fuerza de reacción de un suelo elástico (Hipótesis de Winkler), siendo ésta proporcional
a la deflexión de la viga w.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
91
F
Fig.4.18. Modelado del terreno como semiespacio elástico (viga continua).
La ecuación es la siguiente:
p)x(FwxwIE i4
4z +δ⋅=⋅α+∂
∂⋅ (4.5.1)
Donde:
- E = módulo de Young.
- Iz = momento de inercia de la sección respecto al eje vertical z.
- m0 = masa uniforme de la vía (incluye masa de raíles y de traviesas)
- α = coeficiente de proporcionalidad del suelo elástico. (coeficiente de
Winkler).
- Fi = fuerza vertical puntual aplicada sobre la viga en x = 0.
- δ(x) = Función Delta de Dirac.
Señalar que el coeficiente de proporcionalidad α depende de la rigidez del balasto,
del suelo y también de la almohadilla de caucho insertada entre raíl y traviesas, así
como bajo las traviesas.
La solución de la ecuación (4.5.1) es la siguiente:
( ) ( )α
+β+β⋅+β+β⋅= β−β pxDsenxcosCexBsenxcosAew xx (4.5.2)
siendo:
4zEI4
α=β (4.5.3)
Aplicando las condiciones de contorno se obtiene los valores de A, B, C y D.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
92
⎪⎩
⎪⎨⎧
→∂∂→
∞→nulosección la de giro 0
xw
nula flecha 0wx
⎪⎪⎩
⎪⎪⎨
⎧
=
=∂∂
=conocido cortante
2F-F
horizontal e tangent0xw
0xi
Llegamos a la ecuación:
( ) ( )( )α
+β+ββ
= β− pxsenxcoseEI8
Fw x3
z
i (4.5.4)
Teniendo en cuenta que x puede ser positiva y negativa y que w es simétrica
respecto a x = 0, se puede expresar la ecuación (4.5.4) como:
( ) ( )( )α
+β+ββ
= β− pxsenxcoseEI8
Fw x
3z
i (4.5.5)
Además también es posible deducir que la distancia de deflexión efectiva de la vía
es del orden de:
βπ
=st0x (4.5.6)
4.5.3. Cálculo dinámico de la curva de deflexión de la vía.
Para el caso de trenes de alta velocidad, que es el caso que nos compete, puede
ocurrir que la velocidad del vehículo sea del mismo orden que la velocidad mínima de
propagación de ondas de flexión en el sistema vía-balasto. Este hecho provoca que los
efectos dinámicos jueguen un papel importante en el cálculo de la curva de deflexión.
La ecuación dinámica de una viga sobre un suelo elástico es:

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
93
( )t·vx·Fw·twm
xwEI i2
204
4z −δ=α+
∂
∂+
∂
∂ (4.5.7)
Donde las variables tienen el mismo significado que en la ecuación (4.5.1). En
esta ecuación se ha despreciado la influencia del peso uniforme p.
A continuación se estudia la ecuación de la propagación libre de la onda en la
viga. La ecuación dinámica será la siguiente:
0w·twm
xwEI 2
204
4z =α+
∂
∂+
∂
∂ (4.5.8)
Se sustituye la solución en forma de ondas armónicas.
( )ctxikAew −= (4.5.9)
Donde
A = Amplitud de la onda.
c = Velocidad de propagación de la onda en la vía.
k = Número de onda.
λπ= 2k (4.5.10)
Siendo λ la longitud de onda.
Además la frecuencia circular es:
c·kT2 =π=ω (4.5.11)
De forma que al sustituir en (4.5.9) se obtiene:
tiikxAew ω−= (4.5.12)
Al sustituir (4.5.12) en (4.5.8) obtenemos la ecuación de dispersión de ondas
propagándose en el sistema formado por la vía:

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
94
0
4
mEIk+α
=ω (4.5.13)
Teniendo en cuenta la ecuación (4.5.11) llegamos a:
0
22
mEIkkc +α
= (4.5.14)
La velocidad de onda presenta un mínimo para ( ) 41EIk α= . Entonces:
41
0min m
EI4c ⎟⎟⎠
⎞⎜⎜⎝
⎛ α= (4.5.15)
Teniendo en cuenta lo anterior, se presenta a continuación la solución dinámica de
la ecuación (4.5.7):
( ) ( )( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛−βη
ηδ
+−βηδβ
=− −βδ− t·vxsent·vxcoseEI8
Ft·vxw t·vx3
z
i (4.5.16)
Donde: 2min
2
cv1−=δ y 2
min
2
cv1+=η
Notar que si la velocidad del tren (v) se aproxima a la velocidad mínima de
propagación libre de ondas (cmin), el parámetro δ → 0 y como consecuencia w → ∞,
mostrando un comportamiento resonante.
4.5.4. Fuerza aplicada por una traviesa sobre la estructura.
Una vez que hemos calculado la curva de deflexión de la vía, cada traviesa puede
ser considerada como una fuerza vertical puntual aplicada sobre la estructura, cuya
dependencia del tiempo queda determinada por el paso de la curva de deflexión a lo
largo de la traviesa.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
95
La fuerza ejercida por una traviesa que está situada a una distancia x de la carga
aplicada, cuando la carga aplicada está situada en x = 0, es:
( ) ( )xw·d·xP ∆α= (4.5.17)
Donde ∆d es el ancho de la traviesa.
Considerando ahora una traviesa en x = 0, la fuerza en función del tiempo P(t)
desde que pasó por ella la carga a velocidad v, equivale a la expresión de P(x) (4.5.17)
para distintas posiciones de la traviesa respecto a la carga:
( ) )t·v(w·d·tP ∆α= (4.5.18)
Señalar que para una traviesa en x = n·d (n = 1, 2, 3…), la fuerza en función del
tiempo estará desfasada en el tiempo un valor v
n·d .
Hemos pasado de un modelo de la vía como una viga continua sobre un semi-
espacio elástico (figura 4.18) a un modelo en el que cada traviesa es soportada por un
muelle de rigidez α·∆d (figura 4.19).
F∆d
α·∆d
Fig.4.19. Modelo del terreno como semiespacio elástico (Cada traviesa es soportada por un muelle)

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
96
Como no conocemos el valor α·∆d, se calcula este término suponiendo que la
carga Fi es soportada por un número efectivo de traviesas Neff las cuales se desplazan la
cantidad correspondiente al desplazamiento máximo del problema cuasi-estático stmaxw .
3z
istmax
EI8
Fw
β= (4.5.19)
F∆d
α·∆d
stmaxw
Fig.4.20. Cálculo del número efectivo de traviesas Neff
Entonces:
stmaxeff
ieff
stmaxi
w·N
Fd·N·w·d·F =∆α→∆α= (4.5.20)
Por tanto:
( ) ( )stmaxeff
i
wt·vw
NFtP = (4.5.21)
Donde Neff se puede aproximar, para valores de β tales que -1-1 m 1.3 m 0.2 ≤β≤ ,
como:
d··2
Neff βπ
= (4.5.22)

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
97
Sustituyendo en (4.5.21) se obtiene:
( ) )t·v(wx·w
d2·FtP st0
stmax
i= (4.5.23)
Esta expresión es válida para el régimen cuasi-estático y dinámico.
Todas las ecuaciones de este apartado están implementadas en una hoja de EXCEL
(Anexo B) que se puede encontrar en el Trabajo de Investigación Tutelado [21].
En la figura siguiente se presenta la curva φ(t) = P(t)/Fi para una traviesa en x = 0
m, donde Fi =170 KN, v = 87.5 m/s, d = 0.6 m, m0 = 620 Kg/m, EI = 1.28·107 N·m2 y α
= 2.50·108 N/m2.
00,05
0,10,15
0,20,25
0,30,35
0,40,45
0,5
-0,004 0,001 0,006 0,011 0,016 0,021 0,026 0,031 0,036
tiempo (s)
P(t)/
F
Fig.4.21. Curva φ(t) para una traviesa en x = 0 m.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
98
4.6. Vehículos ferroviarios utilizados.
Los sistemas de guiado de alta velocidad pueden catalogarse en tres tipos
distintos:
1) Trenes convencionales: Cada coche de pasajeros tiene dos bogies, a su vez
con dos ejes cada uno. De este tipo son los trenes Europeos ICE2, ETR-Y y
VIRGIN.
d2
d1
Fig.4.22. Espaciamiento regular dk en trenes convencionales.
2) Trenes articulados: Existe un bogie de dos ejes compartido entre cada dos
coches, centrado en la articulación entre ambos. De este tipo son los trenes
THALYS, AVE, EUROSTAR.
d1 Fig.4.23. Espaciamiento regular dk en trenes articulados.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
99
3) Trenes regulares: Los coches de pasajeros están sustentados también sobre
unión articulada, pero el apoyo se produce en un eje único ente cada dos
coches, sin bogie. Es el caso del TALGO AV.
d1 Fig.4.24. Espaciamiento regular dk en trenes regulares.
En función de estas topologías se pueden definir los diferentes espaciamientos
característicos dk. En la tabla siguiente se recogen las distancias d1 correspondientes a
algunas de las composiciones de alta velocidad.
TREN EUROSTAR TGV ICE2 THALYS ETR-Y-500 TALGO- AV
d1 (m) 18.70 18.70 26.40 18.70 26.10 13.14
Tabla 4.3. Espaciamientos característicos dk de los principales trenes europeos.
En los problemas estudiados se han utilizados composiciones diferentes, aunque el
tren de carga real que más se ha utilizado es el THALYS. Es por ello por lo que se
recoge a continuación las características más importantes de este vehículo ferroviario.
En el anexo A se recogen las características de las demás composiciones utilizadas.
El tren THALYS es junto al TGV y el EUROSTAR los trenes de alta velocidad
franceses. Capaz de alcanzar una velocidad de circulación de 300 km/h es denominado
como el tren rojo. Al igual que el AVE- 100 tiene un tipo de tracción distribuida y una
muy buena estabilidad en marcha. En cuanto a su arquitectura, es un vehículo articulado
compuesto por 2 locomotoras y 8 vagones, siendo la longitud total del tren es de 200.18
metros. La locomotora es soportada por 2 bogies y tiene 4 ejes. Entre los vagones se
pueden distinguir dos tipos: los vagones próximos a la locomotora (2 vagones) y los
vagones centrales (6 vagones). Los primeros tienen un bogie propio con dos ejes y otro

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
100
bogie compartido con el vagón central siguiente. Los segundos tienen dos bogies
compartidos con dos ejes cada uno. En la siguiente tabla se presenta la carga por eje y la
distancia a la cabeza correspondiente.
Fig.4.25. Tren de alta velocidad THALYS
Tabla.4.4. Características del THALYS
Donde lk es la distancia a la cabeza de la composición en m y Fi es la carga por eje
en N.
Eje lk Fi
1 0.000 170000
2 3.000 170000
3 14.000 170000
4 17.000 170000
5 20.275 163000
6 23.275 163000
7 38.975 170000
8 41.975 170000
9 57.675 170000
10 60.675 170000
11 76.375 170000
12 79.375 170000
13 95.075 170000
14 98.075 170000
15 113.775 170000
16 116.775 170000
17 132.475 170000
18 135.475 170000
19 151.175 170000
20 154.175 170000
21 169.875 163000
22 172.875 163000
23 176.150 170000
24 179.150 170000
25 190.150 170000
26 193.150 170000

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
101
170000
03141720.27523.27538.97541.97557.67560.675
1115.715.73 3 3 3 33.275
170000170000170000170000170000170000170000 163000163000 Fi (N)
lk (m)
dk (m)
Vagón central Vagón enlace Locomotora
Fig.4.26. Características tren THALYS.
4.7. Modelos de puentes utilizados.
4.7.1. Tipos de modelos y elementos.
Los cálculos con elementos finitos utilizan modelos de dos o tres dimensiones. En
la mayor parte de los problemas se utilizará los modelos bidimensionales, en los cuales
la estructura se representa dentro de un plano vertical según la dirección longitudinal.
En cuanto a los modelos tridimensionales recogen también la dimensión transversal del
puente.
a) Modelos bidimensionales.
Los modelos de dos dimensiones son los más sencillos y utilizados, y en ellos se
emplean elementos tipo viga para representar tanto el tablero del puente como los
estribos del mismo.
Asimilar el comportamiento del sistema a un modelo simplificado con elementos
tipo viga, exige la definición de una sección equivalente, normalmente rectangular
(figura 4.27) y con características semejantes a la original.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
102
a
b
Sección rectangular equivalenteEI, a, b, densidad
z
y
Fig.4.27. Definición sección equivalente en el modelo bidimensional.
En los modelos realizados se han cogido como propiedades de partida el producto
EIzz y el área A de la sección, para el tablero y para los estribos, de forma que toman
valores pertenecientes a puentes reales. En cuanto a la densidad, se ha tomado la del
hormigón armado convencional.
Es posible definir una densidad equivalente en la cual se tenga en cuenta el
correspondiente peso de balasto y el resto de cargas muertas (señalización, postes de
catenaria, etc.). En los apartados 5.5 y 5.6 se exponen ejemplos en los cuales se tiene en
cuenta dicha densidad equivalente ρeq.
Para los problemas que se estudiarán en este proyecto se ha utilizado como
programas de elementos finitos ANSYS Release 8.0 y FEAPpv, comparándolos en la
mayor parte de los problemas. Decir que, debido al gran tiempo computacional que
requiere la manipulación de datos de salida correspondientes a FEAPpv, en algunos
problemas se ha utilizado únicamente ANSYS. Además, también se ha utilizado
MATLAB v.6.5 [27] y Microsoft EXCEL 2002 para la manipulación y representación
de los resultados.
Para ANSYS se utiliza el elemento viga BEAM4, ya referenciado en el apartado
3.1.1 y para FEAPpv se utiliza el elemento viga ‘FRAMe’ descrito en el apartado 3.2.1.
Ambos elementos están formados por dos nodos con seis grados de libertad cada uno y
están provistos de tracción, compresión y torsión.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
103
Cada tipo de puente tendrá diferentes discretizaciones. Un ejemplo de
discretización para un pórtico de un vano de 20 metros y de altura 8.5 metros se
presenta a continuación:
X
Y
0.5
0.425
8.5
Nodos
Fig.4.
28. Mallado de un puente de un vano de 20 m de longitud y 8.5 m de altura.
b) Modelos tridimensionales.
Se ha utilizado un modelo tridimensional para el último problema estudiado en el
proyecto con la intención de ver los efectos provocados por dos trenes de alta velocidad
circulando en sentidos opuestos.
El análisis se ha llevado a cabo con ANSYS y se ha empleado para modelar el
tablero el elemento SHELL93, de forma que se asimila el comportamiento del sistema al
de una placa con sección rectangular. Los estribos se han modelado con el elemento
BEAM4.
b
h
Sección rectangular equivalenteEI, b, h, densidad
z
y
Fig.4.29. Definición de la sección equivalente en modelos tridimensionales.

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
104
El elemento SHELL93 está provisto de seis grados de libertad en cada uno de los
nodos y sus funciones de forma son cuadráticas en ambos planos de dirección.
Al igual que en los modelos bidimensionales, las propiedades de partida para
definir la sección equivalente de la placa y de los estribos son la inercia Izz y el área A de
la sección correspondiente. Además, partiendo de la densidad del hormigón armado, se
ha definido una densidad equivalente mediante la cual se tenga en cuenta el peso del
balasto y otras cargas muertas.
4.7.2. Conexión estructura-suelo.
Otro aspecto importante es la conexión entre la estructura y el suelo. Realizaremos
modelos en los cuales se considerará el suelo como infinitamente rígido (Fig. 4.28), con
lo cual se restringirán todos los grados de libertad en la base de los estribos. Otra opción
más realista es considerar el suelo como un material elástico y modelarlo mediante
muelles con una rigidez equivalente. La rigidez que se ha tenido en cuenta corresponde
a la de un suelo viscoelástico, según se puede encontrar en (Estudio comparativo de la
respuesta dinámica de puentes con diversas tipologías sometidos a cargas móviles con
interacción suelo-estructura [29]) y su valor, además del modelo utilizado, son los
siguientes:
Keq = 8.9 · 109 N·m
Fig.4.30. Modelo de conexión estructura-suelo con muelles de rigidez equivalente.
Keq
estribo
tablero
suelo
conexión estructura-suelo

La resonancia en puentes de ferrocarril y métodos de cálculo dinámico Proyecto Fin de Carrera
105
4.7.3. Modelo de puentes teniendo en cuenta las traviesas.
Las traviesas, para aquellos problemas en que aparecen, se modelan mediante dos
elementos (tres nodos), tal y como se muestra en la siguiente figura:
∆d
d
Nodos
Traviesa
Fig.4.31. Modelo del tablero teniendo en cuenta las traviesas.
Normalmente se utilizará ∆d = 0.3 m y d = 0.6 m.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
106
5. Análisis de distintas tipologías de puentes.
Se pretende en este apartado realizar un estudio paramétrico de distintas tipologías
de puentes, a los cuales se les variará el número de vanos, la longitud de los mismos, la
altura de los estribos, la conexión estructura-suelo, etc...
En cuanto al tren de cargas, si no se dice lo contrario, en todos los problemas se ha
utilizado el tren THALYS circulando a una velocidad de 100 m/s (360 km/h).
Para el caso en que se considere la deflexión de la vía y la correspondiente carga
ejercida por las traviesas (apartado 4.5 y anexo B), se ha utilizado las siguientes
propiedades de la vía, traviesas y balasto:
Fi 170 KN
d 0.6 m
m0 620 Kg/m
EI 1.28·107 N·m2
α 2.50·108 N/m2
Tabla 5.1. Propiedades de la vía, traviesas y balasto utilizadas.
5.1. Análisis de puentes de un vano.
En este punto se estudiarán problemas de puentes con un único vano de forma que
se variará la longitud del mismo y también la altura de los estribos. Así tendremos
cuatro subapartados con combinaciones diferentes de longitud de vano y altura de
estribos. En cada uno de estos subapartados se realizarán modificaciones en cuanto al
modelo de carga utilizado y el modelado del terreno. Por último se compararán entre sí
los resultados obtenidos en los puntos anteriores.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
107
Los puentes que se estudiarán en este apartado serán estructuras hiperestáticas,
modeladas en 2D y asimiladas a pórticos intraslacionales. Según lo que se comenta en el
punto 4.3, los modos que nos interesan son aquellos con frecuencias inferiores a 20 Hz.
A continuación se dibujan los cuatro primeros modos de vibración de un pórtico
cualquiera:
XX
Y
XX
Y
XX
Y
XX
Y
MODO 1 MODO 2
MODO 3 MODO 4
Fig. 5.1. Modos de vibración en un pórtico intraslacional.
Las propiedades de la estructura que se han utilizado para este tipo de puentes
serán las siguientes:
Losa Estribos
( )2zz m·NEI 2.07506·1010 ( )2
xx m·NEI 6.6367708·1011
( )2yy m·NEI 7.3004·1011 ( )2
zz m·NEI 1.5708333·1011
ν 0.2 ν 0.2
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.2. Propiedades de la losa y los estribos en los puentes de un vano estudiados.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
108
Estos datos se han utilizado en todos los problemas del punto 5.1 con la intención
de centrarnos únicamente en los efectos que producen la variación de longitudes de
tableros y estribos, de tipos de apoyos, etc.
Para recoger estas propiedades en el modelo, se definen las siguientes secciones
equivalentes (con E = 29 · 109 N/m2):
6.5
ESTRIBO
Z
X
1
Fig.5.2. Secciones equivalentes obtenidas para los puentes de un vano.
Otra consideración importante es el intervalo de integración h utilizado. Como
estamos trabajando con longitudes de vano de 20 m y 30 m, y según el apartado (2.3.3),
el intervalo h2 será siempre menor que h4 (para v ≥ 75 m/s). Por tanto utilizaremos h =
h4 = 0.002 s.
Señalar que en todos los casos se ha utilizado como coeficientes del
amortiguamiento de Rayleigh, α = 0 y δ tal que la tasa de amortiguamiento para el
primer modo sea ζ1 = 5%. (Ecuación 2.4.6). Esto se debe a que, según el tipo de carga
que tenemos, las frecuencias dominantes corresponden al primer modo. Es decir, la
frecuencia de excitación de la carga en cuestión se puede aproximar como:
kaargc dv f = (5.1.1)
6 .5
T A B LE R O
Z
Y1.1

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
109
En nuestro caso (tren THALYS a v = 100 m/s) fcarga = 100/15.7 = 6.4 Hz,
mientras que para los tipos de estructuras que se tratan las frecuencias correspondientes
al primer modo f1 varían en un rango entre 10 ÷ 20 Hz aproximadamente. Para el caso
en que realicemos un barrido de velocidades, y se llegue, por ejemplo a una velocidad
de 200 m/s, la frecuencia correspondiente a la carga sería de 12.8 Hz, siendo también la
frecuencia del primer modo de vibración la de mayor participación en la respuesta total
de la estructura.
5.1.1. Puente de un vano de 20 metros y estribos de 8.5 metros.
Vamos a realizar el estudio de un pórtico simple sometido a un tren de cargas
La estructura se esquematiza en la siguiente figura:
20
8.5
X
Z
X
Y
A B C
Fig.5.3. Esquema del puente de un vano de 20 m y 8.5 m de altura.
a) Apoyos rígidos y modelo de carga puntual.
Se modela el terreno como infinitamente rígido (empotramiento) y el tren de
cargas con el modelo de carga puntual descrito en la sección 4.4.
X
Z
X
Z
Fig.5.4. Modelo del terreno mediante empotramientos.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
110
Realizando un análisis modal de la estructura se obtiene que las frecuencias
naturales de los cuatro primeros modos de vibración son:
Modo de vibración Frecuencia natural (Hz)
1 64.23f1 =
2 8.44f2 =
3 5.49f3 =
4 6.64f4 =
Tabla 5.3. Frecuencias naturales del puente de un vano de 20 m y 8.5 m de altura (empotrado).
Aplicando la ecuación (2.4.6), tomando como frecuencia dominante f1, se obtiene
que δ = 0.0007.
El desplazamiento vertical que se obtiene en el centro del vano cuando pasa por la
estructura un tren de alta velocidad THALYS a 100 m/s es el siguiente:
0 0.5 1 1.5 2 2.5 3 3.5 4-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.5. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
111
Se observa que el máximo desplazamiento (-1.37·10-4 m) se produce entorno a
0.24 segundos, instante en el cual el último eje de la primera locomotora pasa por el
punto central. Por tanto éste es el instante crítico de la estructura ante el paso del
ferrocarril. También es crítico el momento en el que el mismo eje de la última
locomotora pasa por ese punto.
Del estudio de la figura 5.5 se puede concluir que nos encontramos en una
situación en la que las excitaciones producidas por el paso de cada eje no se superponen
y que por tanto no se produce un efecto resonante.
Destacar que se ha realizado el análisis con los programas de elementos finitos
ANSYS y FEAPpv, y que la solución que nos proporcionan es bastante similar. Para
corroborar esto se presenta el error absoluto entre las dos soluciones:
0 0.5 1 1.5 2 2.5 3 3.5 4-3
-2
-1
0
1
2
3
4x 10-4
tiempo (s)
Erro
r abs
olut
o(%
)
Fig.5.6. Error absoluto en el desplazamiento vertical entre ANSYS y FEAPpv.
El máximo error que se comete es del orden de 2.5·10-4 (%), siendo éste bastante
pequeño.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
112
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
El modelo es el mismo que en el caso anterior con la salvedad de que ahora se
tiene en cuenta la deflexión que sufre la vía ante una carga a velocidad constante, y en
consecuencia, la fuerza que ejercen las traviesas sobre la estructura (apartado 4.5).
Introduciendo las propiedades de la vía, del balasto y de las traviesas recogidas en
el cuadro 5.1 en la ecuación (4.5.23) resulta la siguiente curva φ(t) = P(t)/Fi para una
traviesa en x = 0.
Fig.5.7. Curva φ(t) en x = 0 m
Tabla 5.4. Valores de la curva φ(t)
De esta forma el desplazamiento vertical en el punto B es el siguiente:
t (s) φ(t) = P(t)/Fi 0 0
0.002 0.015728484
0.004 0.052960006
0.006 0.106845644
0.008 0.177700991
0.01 0.262079664
0.012 0.350640497 0.014 0.425736619 0.016 0.459078158
0.018 0.425736619
0.02 0.350640497
0.022 0.262079664 0.024 0.177700991 0.026 0.106845644 0.028 0.052960006
0.03 0.015728484
0.032 0
0
0,1
0,2
0,3
0,4
0,5
0 0,01 0,02 0,03
tiempo (s)
P(t)/F

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
113
0 0.5 1 1.5 2 2.5 3 3.5-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.8. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso b)).
En este caso el máximo desplazamiento es de -4.48·10-3 m y se produce entorno al
mismo instante de tiempo que en el caso anterior ( s 0.27t ≈ ). Al igual que en el caso a),
es posible comprobar que no existen efectos de resonancia.
c) Apoyos elásticos y modelo de carga puntual.
Ahora se va a modelar el terreno como un muelle con una rigidez equivalente Keq
y el tren de cargas con el modelo de carga puntual descrito en la sección 4.4. La rigidez
equivalente utilizada es Keq = 8.9·109 N·m. La estructura se esquematiza en la figura 5.9.
XX
Y
Keq Keq
Fig.5.9. Modelo del terreno mediante muelles de rigidez equivalente.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
114
Realizando un análisis modal a la estructura anterior se obtiene que f1 = 18.7 Hz y
por tanto, según la ecuación (2.4.6) se obtiene que δ = 0.00085.
En la figura 5.10 se muestra el desplazamiento vertical en el centro del vano para
este caso.
0 0.5 1 1.5 2 2.5 3 3.5 4-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.10. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso c)).
La flecha máxima se produce en t = 0.24 s y es de 1.77·10-4 m, aunque también
hay un instante crítico para t = 1.8 s. Como es posible observar, se pueden distinguir
fácilmente los efectos que producen cada uno de los ejes, sin que haya por consiguiente,
efectos de acoplamiento.
d) Comparación de los casos a), b) y c).
En primer lugar se comparan los casos a) y b). Se puede ver que si consideramos
los efectos dinámicos debidos a la deflexión de la vía, el desplazamiento en el centro del
vano es, en todo instante, mayor que si no los consideramos. La figura siguiente muestra
dicha afirmación.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
115
0 0.5 1 1.5 2 2.5 3 3.5 4-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
Comparación de los casos a) y b)
caso a)caso b)
Fig.5.11. Comparación de los desplazamientos obtenidos en los casos a) y b).
Ahora se comparan los casos a) y c), es decir, considerar el suelo como
infinitamente rígido o como un suelo elástico con una rigidez equivalente. Es obvio que
con la segunda consideración el desplazamiento vertical de la estructura será mayor que
con la primera.
0 0.5 1 1.5 2 2.5 3 3.5 4-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
Comparación entre los caso a) y c)
caso a)caso c)
Fig.5.12. Comparación de los desplazamientos obtenidos en los casos a) y c).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
116
e) Barrido de velocidades del tren de cargas para el caso a).
Se ha adoptado una discretización uniforme en velocidades en el rango v ∈
( ) ( ) h/Km486108s/m13530 ÷≡÷ , con un incremento ∆v = 5 m/s (18 km/h).
El objeto de este estudio es determinar aquellas velocidades que producen
mayores efectos sobre la estructura. En el cuadro 5.5 se recogen la flecha máxima que
se produce en el centro del vano para cada una de las velocidades. Además también se
recogerán los coeficientes de impacto Φ correspondientes, calculados según la
expresión:
max,est
max,dinδ
δ=Φ (5.1.2)
Donde maxdin,δ es la flecha dinámica máxima y maxest,δ es la flecha estática
máxima.
En este caso, al ser la distancia característica de la composición (dk = 18.7 m)
menor que la longitud del vano (L = 20 m), se dará el hecho de que dos ejes estén a la
vez sobre el puente. Por tanto no podemos calcular la flecha estática como si de una
única carga estática aplicada en el centro del vano se tratase. Para ello las
recomendaciones dicen que se realice un análisis a una velocidad baja, tal que sea
menor a 20 km/h. En nuestro caso se ha realizado un análisis con v = 2 m/s.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
117
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Coeficiente de
impacto Φ
2 7.2 - 1.3428· 10- 4 --
30 108 - 1.3544 · 10- 4 1.0086
40 144 - 1.3568 · 10- 4 1.0104
45 162 - 1.3563· 10- 4 1.0101
50 180 - 1.3703 · 10- 4 1.0205
55 198 - 1.3586 · 10- 4 1.0118
60 216 - 1.3614 · 10- 4 1.0139
65 234 - 1.3946· 10- 4 1.0386
70 252 - 1.4398 · 10- 4 1.0722
75 270 - 1.4426 · 10- 4 1.0743
80 288 - 1.4315· 10- 4 1.0661
85 306 - 1.4083 · 10- 4 1.0488
90 324 - 1.3747 · 10- 4 1.0238
95 342 - 1.3826 · 10- 4 1.0296
100 360 - 1.3740 · 10- 4 1.0232
105 378 - 1.3580 · 10- 4 1.0113
110 396 - 1.3671· 10- 4 1.0181
115 414 - 1.3836 · 10- 4 1.0304
125 450 - 1.3858 · 10- 4 1.0320
135 486 - 1.3760 · 10- 4 1.0247
Tabla 5.5. Flecha dinámica máxima y coeficiente de impacto para distintas velocidades.
En las siguientes figuras se representa la flecha dinámica máxima y el coeficiente
de impacto en función de la velocidad.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
118
100 150 200 250 300 350 400 450 5001.35
1.36
1.37
1.38
1.39
1.4
1.41
1.42
1.43
1.44
1.45x 10
-4
v (Km/h)
Des
plaz
amie
nto
verti
cal m
axim
o en
el c
entro
del
van
o
Fig.5.13.Valor absoluto del desplazamiento vertical máximo en el centro del vano para distintas
velocidades.
100 150 200 250 300 350 400 450 5001
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
1.09
v (Km/h)
Coe
ficie
nte
de im
pact
o
Fig.5.14. Coeficiente de impacto para distintas velocidades.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
119
Se puede observar en las figuras 5.13 y 5.14 que, en el rango de velocidades
estudiado, existe un pico que sobresale de los demás en torno a 75 m/s. Aplicando la
ecuación (4.3.1) con f0 = 23.64 Hz y dk =18.7 m, se comprueba que hay un riesgo de
resonancia para la velocidad de riesgo correspondiente a i = 6:
m/s 75y m/s 70 entre m/s 68.7364.23 · 6
18.7 v 6 i Para ⇒==⇒=
Representando la respuesta correspondiente a v = 75 m/s, se observa que no se
producen efectos de acoplamiento entre las solicitaciones de cada eje, con lo cuál se
puede concluir que en este puente y con estas propiedades, no se produce resonancia.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
v = 75 m/s
ANSYSFEAPPV
Fig.5.15. Desplazamiento vertical en el centro del vano (THALYS, v = 75 m/s, caso a)).
f) Barrido de rigideces equivalentes.
Partiendo del modelo de la figura 5.9 en el que se considera el terreno como
muelles de rigidez equivalente, se procede en este apartado ha estudiar el
comportamiento de la estructura ante distintos valores de dicha rigidez.
Se ha tomado el siguiente rango:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
120
Keq ∈ ( ) m·N 10·510·1 135 ÷
El anterior es un intervalo bastante amplio donde se recogen comportamientos de
suelos muy elásticos y suelos extremadamente rígidos. Por esta razón, no se ha utilizado
un incremento de Keq uniforme, sino que se ha variado exponencialmente, tal y como
mostramos en la siguiente tabla:
Keq (N·m) f1 (Hz) Coeficiente δ maxdin,δ (m)
1·107 0.29 0.0179 -4.83·10-2
5·107 1.29 0.0080 -1.05·10-2
1·108 2.80 0.0057 -4.40·10-3
5·108 6.16 0.0026 -1.20·10-3
1·109 8.54 0.0019 -5.8995·10-4
5·109 16.15 0.0010 -2.0419·10-4
1·1010 19.08 0.0008 -1.7320·10-4
5·1010 22.26 0.0007 -1.4474·10-4
1·1011 22.83 0.0007 -1.4114·10-4
5·1011 23.44 0.0007 -1.3837·10-4
1·1012 23.54 0.0007 -1.3796·10-4
5·1012 23.62 0.0007 -1.3760·10-4
1·1013 23.63 0.0007 -1.3755·10-4
5·1013 23.64 0.0007 -1.3751·10-4
8.9·109 18.70 0.00085 -1.7721·10-4
∞ 23.64 0.0007 -1.3742·10-4
Tabla 5.6. Flecha máxima para distintas rigideces.
En la tabla 5.6 se recoge, además de la flecha dinámica máxima correspondiente a
cada una de las rigideces, la frecuencia del primer modo de vibración que presenta la
estructura para ese valor de la rigidez y el correspondiente coeficiente de Rayleigh δ.
Estos resultados se recogen en la siguiente figura, cuyos ejes están en escala
logarítmica.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
121
107 108 109 1010 1011 1012 1013 1014-10-1
-10-2
-10-3
-10-4
Keq (N·m)
Des
plaz
amie
nto
en e
l cen
tro d
el v
ano
(m)
Barrido de rigideces
Keq --> infinito
Keq = 8.9 e9 N·m
Fig.5.16. Barrido de rigideces (THALYS, v = 100 m/s, modelo caso c))
Es posible observar que existen dos zonas claramente diferenciadas, pudiendo
escoger el valor de Keq = 8.9 ·109 N·m como el limitante de dichas zonas. Así, para
valores por debajo del anterior, existe una relación lineal entre el incremento de la
rigidez y el decremento de la flecha máxima maxdin,δ . Para valores mayores, la flecha
permanece más o menos constante al incrementarse la rigidez equivalente del muelle.
g) Respuesta del puente ante diferentes trenes de alta velocidad europeos.
Se pretende en este punto ver el comportamiento que tendrá el puente del caso a)
ante el paso de diferentes composiciones de trenes reales.
Se ha escogido un tren de cada tipo: AVE, ICE2 y TALGO AV. Sus
características están recogidas en el anexo A.
Para el tren de alta velocidad español, es decir el AVE, el desplazamiento vertical
en el centro del vano es el siguiente. Notar que este vehículo tiene características muy
similares al tren THALYS.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
122
0 0.5 1 1.5 2 2.5 3 3.5 4-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
AVE
Fig.5.17. Desplazamiento vertical en el centro del vano (AVE, v = 100 m/s, caso a)).
En cuanto al ICE2, la respuesta dinámica se presenta a continuación:
0 1 2 3 4 5 6-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ICE2
Fig.5.18. Desplazamiento vertical en el centro del vano (ICE 2, v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
123
Para el TALGO AV el desplazamiento vertical en el centro del vano es el
siguiente:
0 0.5 1 1.5 2 2.5 3 3.5 4-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
TALGO AV
Fig.5.19. Desplazamiento vertical en el centro del vano (TALGO AV, v = 100 m/s, caso a)).
Es posible comprobar de las figuras 5.17, 5.18 y 5.19 que el TALGO AV produce
ciertos efectos resonantes en tanto en cuanto existe un claro acoplamiento de los efectos
correspondientes a cada uno de los ejes de este tren regular y además una sensible
tendencia creciente del desplazamiento debido a la primera locomotora y a la segunda.
A continuación se comparan las tres respuestas dinámicas en un mismo gráfico
junto con la correspondiente al tren THALYS.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
124
0 1 2 3 4 5 6-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
Comparación de la respuesta dinámica ante el paso de distintos trenes
AVEICE2TALGO AVTHALYS
Fig.5.20. Comparación de la respuestas obtenidas para los distintos trenes (v = 100 m/s).
Como conclusión se puede decir que, independientemente del tipo de vehículo
ferroviario, las solicitaciones máximas se producen en los instantes en que las
locomotoras del tren pasan por el punto en cuestión. También es posible observar como
el THALYS provoca unas flechas mayores que los otros tres, siendo el TALGO AV el
que menores efectos provoca. Además se puede ver como el tren ICE2 tiene un número
de vagones mayor que los demás así como las diferencias que existen entre trenes de
tipo convencional (ICE2), de tipo articulado (AVE y THALYS) y de tipo regular
(TALGO AV). Por último comentar que la respuesta provocada por el tren de alta
velocidad AVE y THALYS son bastante parecidas; esto se puede ver de forma más
clara en la figura 5.21.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
125
0 0.5 1 1.5 2 2.5 3 3.5 4-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
Comparación de la respuesta dinámica ante el paso de distintos trenes
AVETHALYS
Fig.5.21. Comparación de las respuestas obtenidas con los trenes THALYS y AVE (v = 100 m/s).
La tabla siguiente recoge las flechas máximas producidas por cada uno de los
trenes y los instantes en que se producen las mismas:
TREN δmax (m) tδmax (s)
AVE -1.2715·10-4 0.2359
ICE2 -1.2291·10-4 3.4223
TALGO AV -1.1410·10-4 1.6643
THALYS -1.3742·10-4 0.2379
Tabla 5.7. Flecha máxima para los distintos trenes (v = 100 m/s, caso a)).
5.1.2. Puente de un vano de 30 metros y estribos de 8.5 metros
El pórtico que vamos a estudiar en este punto tiene las siguientes características:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
126
30
8.5
X
Z
X
Y
A B C
Fig.5.22. Esquema del puente de un vano de 30 m y 8.5 m de altura.
a) Apoyos rígidos y modelo de carga puntual.
Se modela el terreno como infinitamente rígido (Fig. 5.4) y el tren con el modelo
de carga puntual descrito en la sección 4.4.
Realizando un análisis modal de la estructura se obtiene que las frecuencias
naturales de los cuatro primeros modos de vibración son:
Modo de vibración Frecuencia natural (Hz)
1 45.11f1 =
2 56.39f2 =
3 0.40f3 =
4 0.49f4 =
Tabla 5.8. Frecuencias naturales del puente de un vano de 30 m y 8.5 m de altura (empotrado).
Aplicando la ecuación (2.4.6) se obtiene que δ = 0.0014.
De esta forma, el desplazamiento según la dirección y cuando pasa por la
estructura un tren de alta velocidad THALYS a 100 m/s es el siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
127
0 0.5 1 1.5 2 2.5 3 3.5 4-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.23. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso a)).
Comentar de la figura anterior que, a diferencia de lo que ocurría en el puente de
un vano de 20 metros, en este caso no se puede observar tan claramente los efectos
producidos por cada uno de los ejes intermedios, sino que hay un cierto acoplamiento
entre uno y otro y una cierta tendencia creciente, aunque casi inapreciable. Esto no
ocurre así con los ejes correspondientes a las locomotoras, donde si se puede ver
claramente sus efectos. La flecha máxima es correspondiente al instante en el cuál pasa
por el punto B la primera locomotora (t = 0.2487 s) y su valor es de - 4.7567·10-4 m.
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
El modelo que utilizaremos es el mismo que en el caso a), con la diferencia de que
ahora se tiene en cuenta la deflexión de la vía. Señalar que la curva φ(t) = P(t)/Fi para
una traviesa en x = 0 es la misma que en el caso b) del apartado 5.1.1, ya que en este
caso únicamente cambia el número de traviesas.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
128
Procediendo a la resolución llegamos a la siguiente figura donde se muestra el
desplazamiento vertical en el punto B de la estructura.
0 0.5 1 1.5 2 2.5 3 3.5 4-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.24. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso b)).
El desplazamiento máximo toma un valor de -0.0015 m para t = 0.2635 s. Esta
flecha es mayor que en los casos anteriores.
c) Apoyos elásticos y modelo de carga puntual.
La conexión estructura-suelo se realiza mediante muelles de rigidez Keq = 8.9·109
N·m y el tren de cargas se modela con el modelo de carga puntual descrito en la sección
4.4.
Mediante un análisis modal se obtienen las frecuencias naturales de los cuatro
primeros modos:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
129
Modo de vibración Frecuencia natural (Hz)
1 53.10f1 =
2 21.27f2 =
3 9.29f3 =
4 4.55f4 =
Tabla 5.9. Frecuencias naturales del puente de un vano de 30 m y 8.5 m de altura (apoyos elásticos).
Utilizando la ecuación (2.4.6) se obtiene que δ = 0.0015. A continuación se
muestra los resultados obtenidos:
0 0.5 1 1.5 2 2.5 3 3.5 4
-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.25. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso c)).
La flecha máxima se produce cuando pasa la primera locomotora por el punto
medio del vano (t = 0.2487 s) y su valor es de -5.5840·10-4 m. Dicho desplazamiento
máximo es mayor que el correspondiente al caso a).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
130
d) Comparación de los casos a), b) y c).
Comparando a) y b) se observa que al considerar la deflexión de la viga se
producen mayores desplazamiento que en el caso contrario. Además este hecho es más
pronunciado que en el caso del puente de un vano de 20 metros.
0 0.5 1 1.5 2 2.5 3 3.5 4-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el n
odo
Comparación casos a) y b)
caso a)caso b)
Fig.5.26. Comparación de los desplazamientos obtenidos en los casos a) y b).
Ahora se comparan los casos a) y c). Al igual que ocurría en el caso d) del
apartado 5.1.1, los efectos que produce el modelado del terreno mediante muelles es
mayor que si se considera infinitamente rígido.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
131
0 0.5 1 1.5 2 2.5 3 3.5 4-6
-4
-2
0
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
Comparación de los casos a) y c)
caso a)caso c)
Fig.5.27. Comparación de los desplazamientos obtenidos en los casos a) y c).
e) Barrido de velocidades del tren de cargas para el caso a).
Para realizar un barrido de velocidades se ha tomado una discretización uniforme
en el rango v ∈ ( ) ( ) h/Km 504126 s/m 14035 ÷≡÷ , con un incremento ∆v = 5 m/s
(18 km/h). Con este intervalo se recogen todas las posibles velocidades a las que puede
circular un tren en condiciones normales.
Para determinar aquellas velocidades que producen mayores efectos en el puente,
se muestra en la tabla 5.10 el desplazamiento máximo en el centro del vano para cada
una. También se recogerán los coeficientes de impacto Φ según la ecuación (5.1.2)
Al igual que en el caso e) del apartado 5.1.1, se calculará la flecha estática
mediante un análisis en el que el vehículo ferroviario circule a una velocidad baja de 2
m/s. Esto es así porque la longitud del vano (L = 30 m) es mayor que la distancia
característica de la composición (dk = 18.7 m) y habrá más de un eje a la vez sobre el
puente.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
132
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Coeficiente de
impacto Φ
2 7.2 - 4.5816 · 10- 4 --
35 126 - 4.6787 · 10- 4 1.0212
40 144 - 4.6514 · 10- 4 1.0152
45 162 - 4.6177 · 10- 4 1.0079
50 180 - 4.6392· 10- 4 1.0126
55 198 - 4.6397 · 10- 4 1.0127
60 216 - 4.6214 · 10- 4 1.0087
65 234 - 4.6120 · 10- 4 1.0066
70 252 - 4.6321 · 10- 4 1.0110
75 270 - 4.6442 · 10- 4 1.0137
80 288 - 4.7083 · 10- 4 1.0277
85 306 - 4.7483 · 10- 4 1.0354
90 324 - 4.7434 · 10- 4 1.0353
95 342 - 4.7353 · 10- 4 1.0335
100 360 - 4.7567 · 10- 4 1.0382
105 378 - 4.8048 · 10- 4 1.0487
110 396 - 4.8489 · 10- 4 1.0583
115 414 - 4.8677 · 10- 4 1.0624
120 432 - 4.8546 · 10- 4 1.0596
125 450 - 4.8102 · 10- 4 1.0499
130 468 - 4.7408 · 10- 4 1.0347
135 486 - 4.6525 · 10- 4 1.0155
140 504 - 4.6731 · 10- 4 1.0200
Tabla 5.10. Flecha dinámica máxima y coeficiente de impacto para distintas velocidades.
Se representan los valores de la tabla en la figura siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
133
40 50 60 70 80 90 100 110 120 130 140
4.65
4.7
4.75
4.8
4.85
4.9
4.95x 10-4
v (m/s)
Val
or a
bsol
uto
de la
flec
ha m
áxim
a en
el c
entro
del
van
o
Barrido de velocidades
Fig.5.28. Valor absoluto del desplazamiento máximo en el centro del vano para distintas velocidades.
40 50 60 70 80 90 100 110 120 130 1401
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
v (m/s)
Coe
ficie
nte
de im
pact
o
Fig.5.29. Coeficiente de impacto para las distintas velocidades.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
134
Es posible dilucidar de las figuras 5.28 y 5.29 que, en el rango de velocidades
estudiado, hay un pico correspondiente a v = 115 m/s. Si aplicamos la ecuación (4.3.1),
en este caso con f0 = 11.45 Hz y dk =18.7 m, podemos decir que esta velocidad es
relativamente cercana a la obtenida para i = 2. Las posibles diferencias se pueden deber
a la existencia de otros factores que condicionan la resonancia y que además sólo hemos
tenido en cuenta la frecuencia de vibración correspondiente al primer modo, siendo la
estructura estudiada hiperestática.
m/s 115 a próxima m/s 1.1071.451 · 2
18.7 v 2 i Para ==⇒=
Se representa la respuesta dinámica en el centro del vano para la velocidad v =
115 m/s que provoca los mayores efectos en el rango estudiado.
0 0.5 1 1.5 2 2.5 3 3.5 4-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
v = 115 m/s
Fig.5.30. Desplazamiento vertical en el centro del vano (THALYS, v = 115 m/s, caso a)).
De la figura 5.30 es posible concluir que, al igual que pasaba con v = 100 m/s, los
efectos de acoplamiento son inapreciables. Por tanto, para el intervalo de velocidades
expuesto en las figuras 5.28 y 5.29 no hay resonancia.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
135
f) Respuesta del puente ante diferentes trenes de alta velocidad europeos.
En este punto se verá el efecto que sufre el puente estudiado en el caso a) ante el
paso de los trenes europeos AVE, ICE2 y TALGO AV (anexo A). En el gráfico
siguiente se comparan dichas respuestas junto a la producida por el THALYS (v = 100
m/s).
0 1 2 3 4 5 6-6
-4
-2
0
2x 10
-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
Comparación para distintos trenes
AVETALGO AVICE2THALYS
Fig.5.31. Comparación de la respuestas obtenidas para los distintos trenes (v = 100 m/s).
Al igual que ocurría en el puente de 20 m, se puede decir que las solicitaciones
máximas se producen en aquellos instantes en que las locomotoras de los distintos
trenes pasan por el punto central del puente. En este caso la composición que provoca
mayores desplazamientos es el ICE2, siendo el AVE el que menor flecha máxima
produce. Esto se puede ver mejor en la tabla:
TREN δmax (m) tδmax (s)
AVE - 4.4584·10-4 0.2448
ICE2 - 4.7886·10-4 0.2180
TALGO AV - 5.3146·10-4 0.2269
THALYS - 4.7567·10-4 0.2487
Tabla 5.11. Flecha máxima para los distintos trenes (v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
136
5.1.3. Puente de un vano de 20 metros y estribos de 12 metros
La estructura que se estudiara es:
20
12
XX
Y
A B C
Fig.5.32. Esquema del puente de un vano de 20 m y 12 m de altura.
a) Apoyos rígidos y modelo de carga puntual.
Para este tipo de puente únicamente se analizará este caso. Realizando un análisis
modal de la estructura se obtiene que las frecuencias naturales de los cuatro primeros
modos de vibración son:
Modo de vibración Frecuencia natural (Hz)
1 972.20f1 =
2 499.25f2 =
3 692.25f3 =
4 374.52f4 =
Tabla 5.12. Frecuencias naturales del puente de un vano de 20 m y 12 m de altura (empotrado).
Aplicando la ecuación (2.4.6) se obtiene que δ = 0.00076.
El desplazamiento vertical que se obtiene en el centro del vano cuando pasa por la
estructura un tren de alta velocidad THALYS a 100 m/s es el siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
137
0 0.5 1 1.5 2 2.5 3 3.5 4-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.33. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso a)).
El desplazamiento máximo toma un valor de -1.46·10-4 m en el instante t = 0.24 s.
Se produce cuando pasa la primera locomotora y su efecto es mayor que en el caso del
puente de un vano de 20 metros y estribos de 8.5 metros. Además se puede ver que no
existe acoplamiento ya que es posible diferenciar los efectos provocados por el paso de
cada uno de los ejes de la composición.
5.1.4. Puente de un vano de 30 metros y estribos de 12 metros
El pórtico correspondiente a este punto tiene las siguientes dimensiones:
30
12
XX
Y
A B C
Fig.5.34. Esquema del puente de un vano de 30 m y 12 m de altura.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
138
a) Apoyos rígidos y modelo de carga puntual.
En primer lugar se obtienen las frecuencias naturales correspondientes a los cuatro
modos de vibración:
Modo de vibración Frecuencia natural (Hz)
1 078.11f1 =
2 436.23f2 =
3 90.24f3 =
4 67.37f4 =
Tabla 5.13. Frecuencias naturales del puente de un vano de 30 m y 12 m de altura (empotrado).
Aplicando la ecuación (2.4.6) se obtiene que δ = 0.00144.
A continuación se presenta el desplazamiento vertical que se obtiene en el centro
del vano cuando pasa por el puente un tren de alta velocidad THALYS a 100 m/s:
0 0.5 1 1.5 2 2.5 3 3.5 4-6
-4
-2
0
2x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
ANSYSFEAPPV
Fig.5.35. Desplazamiento vertical en el centro del vano (THALYS, v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
139
La flecha máxima se produce en torno a t = 0.25s y su valor es de -5.02·10-4 m.
Este efecto máximo corresponde al paso de la primera locomotora y, como se verá en
apartados siguientes, es mayor que el correspondiente al puente de un vano de 30
metros y estribos de 8.5 metros.
5.1.5. Comparación de la respuesta entre puentes de distintas longitudes de
vano.
En esta sección se comparan las respuestas en el tiempo para los casos de vanos de
20 m y 30 m.
a) Apoyos rígidos y modelo de carga puntual.
En la gráfica siguiente se muestra la comparación del desplazamiento vertical que
provoca un tren THALYS a 100 m/s en el centro del vano de puentes de 20 m y 30 m de
longitud:
0 0.5 1 1.5 2 2.5 3 3.5 4-5
-4
-3
-2
-1
0
1
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el n
odo
Comparación para puentes de distintas longitudes de vano
L = 20 mL = 30 m
Fig.5.36. Comparación del desplazamiento en puentes de distintas longitudes de vano (v = 100m/s, caso
a))

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
140
Como ya sabíamos, la respuesta dinámica del puente de 30 m de luz es mucho
mayor que la correspondiente al puente de 20 m de luz.
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
En la figura 5.37 se representan las respuestas correspondientes al paso del tren
THALYS a 100 m/s:
0 0.5 1 1.5 2 2.5 3 3.5 4-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
Comparación para puentes de disitntas longitudes de vano
L = 20 mL = 30 m
Fig.5.37. Comparación del desplazamiento en puentes de distintas longitudes de vano (v = 100m/s, caso
b)) Es obvio que el desplazamiento vertical, en el caso de modelar el puente teniendo
en cuenta el efecto de la vía y las traviesas, es mayor para el puente de 30 m de luz que
para el de 20 m.
c) Apoyos elásticos y modelo de carga puntual.
Las respuestas dinámicas para este caso, en el cual se modela el terreno como un
muelle de rigidez Keq = 8.9 · 10 9 N·m, son las siguientes:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
141
0 0.5 1 1.5 2 2.5 3 3.5 4-6
-4
-2
0
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
Comparación para puentes de distintas longitudes de vano
L = 20 mL = 30 m
Fig.5.38. Comparación del desplazamiento en puentes de distintas longitudes de vano (v = 100m/s, caso
c))
Es fácil observar que el desplazamiento correspondiente a L = 30 m es mayor para
todo el rango de tiempo que el correspondiente a L = 20 m.
5.1.6. Comparación de la respuesta entre puentes de distintas alturas de los
estribos.
Únicamente se va a comparar, para dos alturas de estribos distintas, el caso en el
que se modela el terreno como infinitamente rígido y se adopta el modelo de carga
puntual para el tren de cargas.
a) Puente de un vano de 20 m de longitud.
En la figura 5.39 se representa las respuestas dinámicas para alturas de estribos de
8.5 m y 12 m en el caso en que pase por el puente un tren THALYS a 100 m/s.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
142
0 0.5 1 1.5 2 2.5 3 3.5 4-16
-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
Des
plaz
amie
nto
en e
l cen
tro d
el v
ano
(m)
Comparación para puente de un vano de 20 m y distintas alturas
h = 8.5 mh = 12 m
Fig.5.39. Comparación del desplazamiento en puentes de distintas alturas (v = 100m/s, caso a), L = 20 m)
Para el caso en que la altura de los estribos es de 12 m, el desplazamiento en el
centro de vano es ligeramente mayor que si los estribos son de 8.5 m.
b) Puente de un vano de 30 m de longitud.
Procediendo de la misma forma que en el caso anterior, se obtiene:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
143
0 0.5 1 1.5 2 2.5 3 3.5
-5
-4
-3
-2
-1
0
1x 10
-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
Comparación para puente de un vano de 30 m y para distintas alturas
h = 8.5 mh = 12 m
Fig.5.40. Comparación del desplazamiento en puentes de distintas alturas (v = 100m/s, caso a), L = 30 m)
Al igual que en el caso anterior, el desplazamiento vertical correspondiente a la
altura de estribos de 12 m es ligeramente mayor que el de 8.5 m.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
144
5.2. Análisis de puentes de dos vanos.
Después de los puentes de un vano se pasa a estudiar los de dos vanos. Al igual
que en el apartado anterior, se realizarán combinaciones con la longitud de los vanos y
la altura de los estribos.
Las estructuras que se tratan son hiperestáticas y serán modeladas en 2D. A
diferencia que en el punto 5.1, se han utilizado para este estudio propiedades del tablero
correspondientes al catálogo de puentes de referencia del comité (ERRI D214 (a) [7])
sobre efectos dinámicos producidos en puentes de ferrocarril para velocidades
superiores a 200 km/h. Por otro lado las propiedades de los estribos se han obtenido de
otros proyectos relacionados con la dinámica de puentes [29].
El intervalo de integración h que se ha elegido es el mismo que en el apartado 5.1,
por las mismas razones (h = h4 = 0.002 s). Además la tasa de amortiguamiento utilizada
en este caso es ζ1 = 2%.
5.2.1. Puente de dos vanos de 10 metros cada uno y estribos de 8.5 metros.
Se realizará el estudio de la estructura esquematizada en la figura 5.41 ante el paso
de un tren de cargas.
10
8.5
XX
Y
A B C
10Vano 2Vano 1
D E
Fig.5.41. Esquema del puente de dos vanos de 10 m y 8.5 m de altura.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
145
Las propiedades para el tablero y estribos correspondientes a este caso son las
siguientes:
Tablero Estribos
( )2zz m·NEI 2.593823 ·109 ( )2
xx m·NEI 4 ·1012
Área ( )2m 4 ( )2zz m·NEI 3.36 ·109
ν 0.2 ν 0.2
E ( )2m/N 29 · 109 E ( )2m/N 29 · 109
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.14. Propiedades puente de dos vanos de 10 m y 8.5 m de altura
Con los datos anteriores se definen, de la forma siguiente, las secciones
rectangulares equivalentes.
- Tablero:
Para una sección rectangular tenemos las siguientes ecuaciones:
3zz bh
121I = (5.2.1)
bhA =
Fig.5.42. Sección equivalente para el tablero.
Resolviendo este sistema de dos ecuaciones y dos incógnitas se obtiene que:
h = 0.5179 m
b = 7.7238 m
b
Z
Yh

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
146
- Estribos:
En este caso las ecuaciones que nos interesan son:
3zz hb
121I = (5.2.2)
3xx bh
121I =
Fig.5.43. Sección equivalente de los estribos.
De esta forma se obtiene:
h = 15.459 m
b = 0.448 m
Una vez definidas las secciones equivalentes se procede a la resolución de los
distintos problemas según sea el modelo de carga o el modelado del terreno que se
utiliza.
a) Apoyos rígidos y modelo de carga puntual.
La estructura tendrá todos sus grados de libertad restringidos en la base de los
estribos (Fig. 5.44) y el tren será considerado mediante el modelo de carga puntual
(sección 4.4).
b
h
Z
X

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
147
XX
Y
Fig.5.44. Modelo del terreno mediante empotramientos.
Las frecuencias naturales de los cuatro primeros modos se recogen en la siguiente
tabla:
Modo de vibración Frecuencia natural (Hz)
1 13.21f1 =
2 46.21f2 =
3 33.24f3 =
4 84.53f4 =
Tabla 5.15. Frecuencias naturales del puente de dos vanos de 10 m y 8.5 m de altura (empotrado).
Utilizando como frecuencia dominante la del primer modo y como tasa de
amortiguamiento ζ1 = 2%, se obtiene, según la ecuación (2.4.6), que el valor del
coeficiente de Rayleigh es δ = 0.0003 (con α = 0).
Con estas premisas se resuelve el problema para el tren de alta velocidad
THALYS a una velocidad de 100 m/s. Los resultados en el centro de cada vano se
muestran en las siguientes figuras:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
148
0 0.5 1 1.5 2 2.5 3 3.5 4-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
vano 1
ANSYSFEAPPV
Fig.5.45. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
0 0.5 1 1.5 2 2.5 3 3.5 4-2.5
-2
-1.5
-1
-0.5
0
0.5x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
vano 2
ANSYSFEAPPV
Fig.5.46. Desplazamiento vertical en el centro del vano 2 (THALYS, v = 100 m/s, caso a)).
En las gráficas anteriores se observa la diferencia existente entre la respuesta
producida en el centro del primer vano y del segundo. Como no puede ser de otra forma,
las solicitaciones máximas en ambos casos se producen en los instantes en que pasa las
locomotoras pasan por dichos puntos. También se aprecia el efecto que ha provocado la
disminución de la tasa de amortiguamiento respecto a la del apartado 5.1.
Los desplazamientos máximos se presentan en el cuadro siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
149
VANO δmax (m) tδmax (s)
1 - 2.7867·10-5 0.2007
2 - 2.4857·10-5 0.2799
Tabla 5.16. Flecha máxima para cada vano (THALYS, v = 100 m/s, caso a)).
A raíz de los resultados anteriores se concluye que, para el caso estudiado, la
flecha máxima en el vano 1 es mayor que en el vano 2. En los casos que se tratarán a
continuación únicamente se ha tenido en cuenta los desplazamientos correspondientes al
vano 1.
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
Ahora, se utiliza el modelo del apartado anterior pero además se tiene en cuenta el
efecto producido por la deflexión de la vía que se recoge en el cuadro 5.1.
El desplazamiento vertical en el centro del primer vano es:
0 0.5 1 1.5 2 2.5 3 3.5 4-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
ANSYSFEAPPV
Fig.5.47. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso b)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
150
La flecha máxima es de -8.2058·10-5 m y se produce cuando la última locomotora
pasa por el punto D de la estructura (t = 1.7754 s). Este desplazamiento es mayor que el
correspondiente al caso a) en el que no se tenía en cuenta los efectos de la vía y las
traviesas.
c) Apoyos elásticos y modelo de carga puntual.
Modelamos el terreno como un muelle de rigidez equivalente Keq = 8.9·109 N/m,
tal y como muestra la figura:
XX
Y
Keq Keq Keq
Fig.5.48. Modelo del terreno mediante muelles de rigidez equivalente.
Así, las frecuencias naturales serán:
Modo de vibración Frecuencia natural (Hz)
1 35.14f1 =
2 52.14f2 =
3 86.16f3 =
4 92.28f4 =
Tabla 5.17. Frecuencias naturales del puente de dos vanos de 10 m y 8.5 m de altura (apoyos elásticos).
El coeficiente δ resultante al aplicar la ecuación (2.4.6) es 0.00044. Se puede
apreciar en la siguiente figura que la flecha máxima que se produce en el instante t =
1.7734 s y su valor es de – 8.8552 · 10-5 m. Además existe un cierto acoplamiento y
ampliación de los efectos producidos por cada uno de los ejes.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
151
0 0.5 1 1.5 2 2.5 3 3.5 4-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
ANSYSFEAPPV
Fig.5.49. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso c)).
d) Comparación de los casos a), b) y c). Al comparar los resultados mostrados en los casos a) y b), tal y como se muestra a
continuación, se puede afirmar, que al considerar los efectos dinámicos debidos a la
deflexión de la vía, las solicitaciones son mayores que en el caso contrario.
0 0.5 1 1.5 2 2.5 3 3.5 4-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
comparación del desplazamiento vertical en el centro del vano 1 para los casos a) y b)
caso a)caso b)
Fig.5.50. Comparación de los desplazamientos obtenidos en los casos a) y b).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
152
La comparación entre los casos a) y c) se presenta en la figura siguiente. Al igual
que en los demás puntos se puede observar como el hecho de modelar el terreno
mediante muelles con una rigidez equivalente produce desplazamientos mayores que si
se modela como un empotramiento.
0 0.5 1 1.5 2 2.5 3 3.5 4-10
-8
-6
-4
-2
0
2x 10-5 Comparación del desplazamiento en el centro del vano 1 para los casos a) y c)
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
caso a)caso c)
Fig.5.51. Comparación de los desplazamientos obtenidos en los casos a) y c).
e) Barrido de velocidades del tren de cargas para el caso a).
Para el barrido de velocidades se ha adoptado el siguiente rango de velocidades:
v ∈ ( ) ( ) h/Km 486126 s/m 13535 ÷≡÷ , con un incremento ∆v = 5 m/s (18 km/h).
Realizando los distintos análisis para las velocidades mostradas, se obtiene las
siguientes flechas dinámicas máximas maxdin,δ . En cuanto a la flecha estática máxima
maxest,δ , utilizada para calcular los coeficientes de impacto Φ según la ecuación (5.1.2),
se ha calculado realizando un análisis con v = 2m/s.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
153
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Coeficiente de
impacto Φ
2 7.2 - 2.4541· 10- 5 --
35 126 - 2.7195· 10- 5 1.1081
40 144 - 2.6905· 10- 5 1.0963
45 162 - 2.7113· 10- 5 1.1048
50 180 - 2.7176· 10- 5 1.1074
55 198 - 2.7588· 10- 5 1.1242
60 216 - 2.7032· 10- 5 1.1015
65 234 - 2.7155· 10- 5 1.1065
70 252 - 2.8249· 10- 5 1.1511
75 270 - 2.8240· 10- 5 1.1507
80 288 - 2.7102· 10- 5 1.1044
85 306 - 2.7360· 10- 5 1.1149
90 324 - 2.7813· 10- 5 1.1333
95 342 - 2.7392· 10- 5 1.1162
100 360 - 2.7867· 10- 5 1.1355
105 378 - 2.8854· 10- 5 1.1757
110 396 - 2.9121· 10- 5 1.1866
115 414 - 2.8831· 10- 5 1.1748
120 432 - 2.8087· 10- 5 1.1445
125 450 - 2.7973· 10- 5 1.1398
130 468 - 2.7784· 10- 5 1.1321
135 486 - 2.7495· 10- 5 1.1204
Tabla 5.18. Flecha dinámica máxima y coeficiente de impacto para distintas velocidades.
En las siguientes figuras se representa la flecha dinámica máxima y el coeficiente
de impacto en función de la velocidad.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
154
40 50 60 70 80 90 100 110 120 1302.65
2.7
2.75
2.8
2.85
2.9
2.95x 10-5
v (m/s)
desp
laza
mie
nto
max
imo
en e
l cen
tro d
el v
ano
1
Barrido de velocidades
Fig.5.52.Valor absoluto del desplazamiento máximo en el centro del vano 1 para distintas velocidades.
40 50 60 70 80 90 100 110 120 1301.08
1.1
1.12
1.14
1.16
1.18
v (m/s)
Coe
ficie
nte
de im
pact
o en
el v
ano
1
Barrido de velocidades
Fig.5.53.Coeficiente de impacto para distintas velocidades.
La mayor solicitación en el rango estudiado se produce para v = 110 m/s. Además
existe otra velocidad para la cual la evolución del desplazamiento sufre un máximo

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
155
local y es entorno a v = 70 m/s. Si aplicamos la ecuación (4.3.1), con f0 = 21.13 Hz y dk
= 18.7 m, se comprueba que la velocidades de riesgo que se obtienen de dicha ecuación
no se corresponden con las anteriores.
m/s 70 a próxima es no m/s 79.0 1.132 · 5
18.7 v 5 i Para
m/s 110 a próxima es no m/s 8.9813.21 · 4
18.7 v 4 i Para
==⇒=
==⇒=
Este hecho puede ser debido a que, para aplicar esta ecuación estamos
considerando como frecuencia fundamental la del primer modo y en este caso las
frecuencias de los modos superiores son muy parecidas a la misma, pudiendo tener una
contribución importante en la respuesta.
Representamos la respuesta de la estructura a lo largo del tiempo para v = 110 m/s
y v = 70 m/s:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
v = 110 m/s v = 70 m/s
Fig.5.54. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 110 m/s, v = 70 m/s, caso a)).
Se puede ver como no existe efectos resonantes aparentes para dichas velocidades.
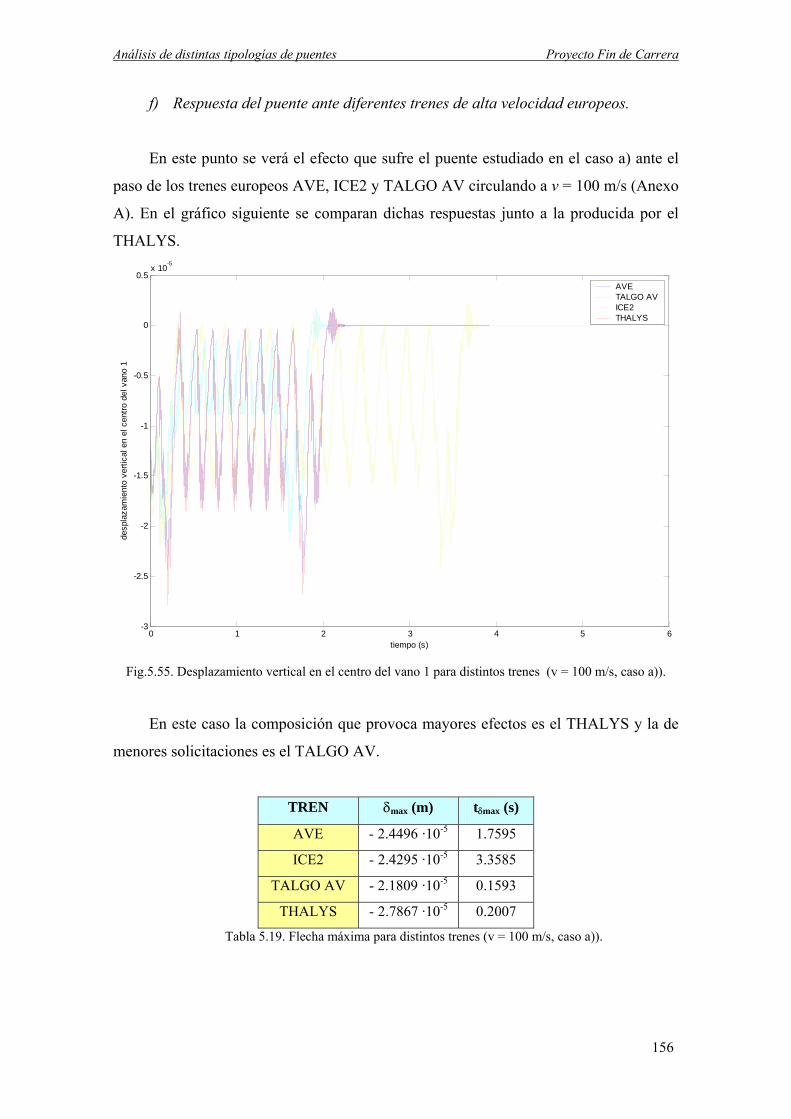
Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
156
f) Respuesta del puente ante diferentes trenes de alta velocidad europeos.
En este punto se verá el efecto que sufre el puente estudiado en el caso a) ante el
paso de los trenes europeos AVE, ICE2 y TALGO AV circulando a v = 100 m/s (Anexo
A). En el gráfico siguiente se comparan dichas respuestas junto a la producida por el
THALYS.
0 1 2 3 4 5 6-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
AVETALGO AVICE2THALYS
Fig.5.55. Desplazamiento vertical en el centro del vano 1 para distintos trenes (v = 100 m/s, caso a)).
En este caso la composición que provoca mayores efectos es el THALYS y la de
menores solicitaciones es el TALGO AV.
TREN δmax (m) tδmax (s)
AVE - 2.4496 ·10-5 1.7595
ICE2 - 2.4295 ·10-5 3.3585
TALGO AV - 2.1809 ·10-5 0.1593
THALYS - 2.7867 ·10-5 0.2007
Tabla 5.19. Flecha máxima para distintos trenes (v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
157
5.2.2. Puente de dos vanos de 10 metros cada uno y estribos de 12 metros.
El esquema de la estructura que se va a estudiar es el siguiente:
10
12
XX
Y
A B C
10Vano 2Vano 1
D E
Fig.5.56. Esquema del puente de dos vanos de 10 m y 12 m de altura.
Se ha utilizado el modelo de carga puntual para considerar el paso del tren y se ha
modelado el terreno con empotramientos. Las frecuencias naturales correspondientes
son:
Modo de vibración Frecuencia natural (Hz)
1 77.10f1 =
2 83.10f2 =
3 55.12f3 =
4 18.29f4 =
Tabla 5.20. Frecuencias naturales del puente de dos vanos de 10 m y 12 m de altura (empotrado).
Utilizando la ecuación (2.4.6) con ζ1 = 2%, f1 y α = 0 se obtiene que δ = 0.00059.
Los resultados son:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
158
0 0.5 1 1.5 2 2.5 3 3.5 4-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
ANSYSFEAPPV
Fig.5.57. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
Donde m10 · 3.4403δ -5max = y tδmax = 0.2039 s. A continuación se comparan los
resultados anteriores con los correspondientes al puente con estribos de 8.5 m de altura.
0 0.5 1 1.5 2 2.5 3 3.5 4-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
Comparación para un puente de dos vanos de 10 m y distintas alturas de estribos
h= 8.5 mh = 12 m
Fig.5.58. Comparación del desplazamiento en puentes de distintas alturas (v = 100m/s, caso a), L = 10 m)

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
159
5.2.3. Puente de dos vanos de 15 metros cada uno y estribos de 8.5 metros.
La estructura se esquematiza en la figura siguiente:
15
8.5
XX
Y
A B C
15Vano 2Vano 1
D E
Fig.5.59. Esquema del puente de dos vanos de 15 m y 8.5 m de altura.
Las propiedades para el tablero y estribos correspondientes a este caso son las
siguientes:
Tablero Estribos
( )2zz m·NEI 7.694081·109 ( )2
xx m·NEI 4 ·1012
Área ( )2m 6 ( )2zz m·NEI 3.36 ·109
ν 0.2 ν 0.2
E ( )2m/N 29 · 109 E ( )2m/N 29 · 109
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.21. Propiedades puente de dos vanos de 15 m y 8.5 m de altura.
Con los datos anteriores se definen, gracias a los sistemas de ecuaciones (5.2.1) y
(5.2.2), las secciones rectangulares equivalentes.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
160
- Tablero:
h = 0.7284 m
b = 8.2372 m
- Estribos:
h = 15.459 m
b = 0.448 m
Se procede a resolver diversos problemas, tomando como base el modelo anterior,
y variando el sistema de cargas y las condiciones de contorno.
a) Apoyos rígidos y modelo de carga puntual.
El esquema de la estructura es el mismo que se representa en la figura 5.44. Las
frecuencias naturales correspondientes son:
Modo de vibración Frecuencia natural (Hz)
1 12.21f1 =
2 46.21f2 =
3 11.23f3 =
4 19.48f4 =
Tabla 5.22. Frecuencias naturales del puente de dos vanos de 15 m y 8.5 m de altura (empotrado).
Utilizando como frecuencia dominante la del primer modo y como tasa de
amortiguamiento ζ1 = 2%, se obtiene, según la ecuación (2.4.6), que el valor del
coeficiente de Rayleigh es δ = 0.0003 (con α = 0).
Los resultados que se obtienen en cada vano al considerar que por el puente
circula un tren THALYS a 100 m/s son:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
161
0 0.5 1 1.5 2 2.5 3 3.5 4-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
vano
1ANSYSFEAPPV
Fig.5.60. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
0 0.5 1 1.5 2 2.5 3 3.5 4-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10
-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
vano
2
ANSYSFEAPPV
Fig.5.61.Desplazamiento vertical en el centro del vano 2 (THALYS, v = 100 m/s, caso a)).
Los desplazamientos máximos en el centro de cada uno de los vanos se presentan
en el cuadro siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
162
VANO δmax (m) tδmax (s)
1 - 4.3973·10-5 1.7874
2 - 4.1939·10-5 0.3717
Tabla 5.23. Flecha máxima para cada vano (THALYS, v = 100 m/s, caso a)).
A raíz de los resultados anteriores se concluye que, para el caso estudiado, la
flecha máxima en el vano 1 es mayor que en el vano 2. Además se puede afirmar que
para este puente se produce una flecha mayor que para el puente de dos vanos de 10 m.
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
Teniendo en cuenta la deflexión de la vía (datos en cuadro 5.1), el desplazamiento
vertical en el centro del primer vano es:
0 0.5 1 1.5 2 2.5 3 3.5 4-14
-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
ANSYSFEAPPV
Fig.5.62. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso b)).
La flecha máxima es de -1.3563·10-4 m y se produce cuando la última locomotora
pasa por el centro del primer vano del puente (t = 1.7974 s ).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
163
c) Apoyos elásticos y modelo de carga puntual.
Con el modelo que se muestra en la figura 5.48 (Keq = 8.9·109 N/m), las
frecuencias naturales que se obtienen son:
Modo de vibración Frecuencia natural (Hz)
1 37.14f1 =
2 53.14f2 =
3 89.15f3 =
4 7.22f4 =
Tabla 5.24. Frecuencias naturales del puente de dos vanos de 15 m y 8.5 m de altura (apoyos elásticos).
El coeficiente δ resultante al aplicar la ecuación (2.4.6) es 0.00044. El
desplazamiento vertical en el centro del primer vano es:
0 0.5 1 1.5 2 2.5 3 3.5 4-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
ANSYSFEAPPV
Fig.5.63. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso c)).
Tenemos que δmax = -1.0088·10-4 m y tδmax = 0.2187 s, es decir, la máxima
solicitación se produce cuando la primera locomotora pasa por el punto correspondiente.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
164
Es posible observar como existe un cierto acoplamiento entre los efectos que provocan
cada uno de los ejes del vehículo ferroviario.
d) Comparación de los casos a), b) y c). En primer lugar se comparan los resultados correspondientes a los casos a) y b).
0 0.5 1 1.5 2 2.5 3 3.5 4-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
caso a)caso b)
Fig.5.64. Comparación de los desplazamientos obtenidos en los casos a) y b).
Como se preveía, el modelo de puente en el cual se tiene en cuenta la deflexión de
la vía provoca mayores desplazamientos que el modelo del caso a).
En la figura 5.65 se presenta la comparación de los resultados entre el caso a) y el
caso c), observándose como en este último los desplazamientos son mayores.
0 0.5 1 1.5 2 2.5 3 3.5 4-12
-10
-8
-6
-4
-2
0
2x 10-5
tiempo (s)
Des
plaz
amie
nto
en e
l cen
tro d
el v
ano
1 (m
)
caso a)caso c)
Fig.5.65. Comparación de los desplazamientos obtenidos en los casos a) y c).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
165
e) Barrido de velocidades del tren de cargas para el caso a).
Se escoge el mismo rango de velocidad y el mismo incremento que en el caso d)
del apartado 5.2.1. En la siguiente tabla se recogen los resultados correspondientes:
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Coeficiente de
impacto Φ
2 7.2 - 4.0620· 10- 5 --
35 126 - 4.1887· 10- 5 1.0312
40 144 - 4.1944· 10- 5 1.0326
45 162 - 4.2182· 10- 5 1.0385
50 180 - 4.1783· 10- 5 1.0286
55 198 - 4.2058· 10- 5 1.0354
60 216 - 4.2444· 10- 5 1.0449
65 234 - 4.3683· 10- 5 1.0754
70 252 - 4.4008· 10- 5 1.0834
75 270 - 4.3372· 10- 5 1.0677
80 288 - 4.2393· 10- 5 1.0436
85 306 - 4.2248· 10- 5 1.0401
90 324 - 4.2412· 10- 5 1.0441
95 342 - 4.3188· 10- 5 1.0632
100 360 - 4.3973· 10- 5 1.0825
105 378 - 4.3839· 10- 5 1.0792
110 396 - 4.2973· 10- 5 1.0579
115 414 - 4.4209· 10- 5 1.0884
120 432 - 4.5609· 10- 5 1.1227
125 450 - 4.6589· 10- 5 1.1469
130 468 - 4.7231· 10- 5 1.1628
135 486 - 4.7340· 10- 5 1.1654
Tabla 5.25. Flecha dinámica máxima y coeficiente de impacto para distintas velocidades.
Los datos de la tabla anterior se recogen en las siguientes gráficas.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
166
40 50 60 70 80 90 100 110 120 1304.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9x 10-5
v (m/s)
desp
laza
mie
nto
max
imo
en e
l cen
tro d
el v
ano
1
Barrido de velocidades
Fig.5.66. Valor absoluto del desplazamiento máximo en el centro del vano 1 para distintas velocidades.
40 50 60 70 80 90 100 110 120 1301.02
1.04
1.06
1.08
1.1
1.12
1.14
1.16
1.18
v (m/s)
Coe
ficie
nte
de im
pact
o en
el v
ano
1
Barrido de velocidades
Fig.5.67. Coeficiente de impacto para distintas velocidades.
La velocidad dentro del rango estudiado que mayores solicitaciones produce es v =
130 m/s. Además se producen máximos locales para v = 70 m/s y v = 100 m/s. La

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
167
velocidad que produce mayores efectos corresponde a la velocidad de riesgo para i = 3
(Ecuación (4.3.1), f0 = 21.12 Hz y dk = 18.7 m).
m/s 70 a próxima m/s 65.8 1.122 · 6
18.7 v 6 i Para
m/s 100 a próxima m/s 98.7 1.122 · 4
18.7 v 4 i Para
m/s 130 a próxima m/s 6.13112.21 · 3
18.7 v 3 i Para
⇒==⇒=
⇒==⇒=
⇒==⇒=
A continuación se representa la respuesta correspondiente a v = 130 m/s en el
primer vano. Es posible comprobar que no se producen efectos resonantes para esta
velocidad.
0 0.5 1 1.5 2 2.5 3 3.5-5
-4
-3
-2
-1
0
1x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
Fig.5.68. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 130 m/s, caso a)).
f) Respuesta del puente ante diferentes trenes de alta velocidad europeos.
Haciendo circular diferentes trenes europeos a v = 100 m/s por el puente del caso
a) se obtienen las siguientes respuestas:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
168
0 1 2 3 4 5 6-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5x 10
-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1AVETALGO-AVICE2THALYS
Fig.5.69. Desplazamiento vertical en el centro del vano 1 para distintos trenes (v = 100 m/s, caso a)).
Los desplazamientos máximos para cada composición son:
TREN δmax (m) tδmax (s)
AVE - 4.0489 ·10-5 1.7875
ICE2 - 3.9082 ·10-5 0.1891
TALGO AV - 3.5369 ·10-5 1.6304
THALYS - 4.3973·10-5 1.7874
Tabla 5.26. Flecha máxima para distintos trenes (v = 100 m/s, caso a)).
Se comprueba que el THALYS es la composición que mayores desplazamientos
provoca en la estructura estudiada; en contraposición está el TALGO AV.
5.2.4. Puente de dos vanos de 15 metros cada uno y estribos de 12 metros.
El esquema de la estructura que se va a estudiar es el siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
169
15
12
XX
Y
A B C
15Vano 2Vano 1
D E
Fig.5.70. Esquema del puente de dos vanos de 15 m y 12 m de altura.
Para este apartado sólo se ha resuelto el problema en el que se considera que la
estructura está empotrada en la base de las pilas.
Modo de vibración Frecuencia natural (Hz)
1 78.10f1 =
2 84.10f2 =
3 85.11f3 =
4 07.29f4 =
Tabla 5.27. Frecuencias naturales del puente de dos vanos de 15 m y 12 m de altura (empotrado).
Utilizando la ecuación (2.4.6) con ζ1 = 2%, f1 y α = 0 se obtiene que δ = 0.00059.
Los resultados son:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
170
0 0.5 1 1.5 2 2.5 3 3.5 4-6
-5
-4
-3
-2
-1
0
1x 10-5
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
ANSYSFEAPPV
Fig.5.71. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
Donde m10 · 5.2599δ -5max = y tδmax = 0.2067 s. En la gráfica siguiente se
muestra las diferencias existentes entre una altura de los estribos de 8.5 m y de 12 m.
0 0.5 1 1.5 2 2.5 3 3.5 4-6
-5
-4
-3
-2
-1
0
1x 10-5
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
h = 12 mh = 8.5 m
Fig.5.72. Comparación del desplazamiento en puentes de distintas alturas (v = 100m/s, caso a), L = 15 m)

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
171
5.2.5. Puente de dos vanos de 25 metros cada uno y estribos de 8.5 metros.
El esquema del puente que se va a estudiar es:
25
8.5
XX
Y
A B C
25
Vano 2Vano 1
D E
Fig.5.73. Esquema del puente de dos vanos de 25 m y 8.5 m de altura.
Las propiedades que se han tenido en cuenta para el tablero y estribos son las
siguientes:
Tablero Estribos
( )2zz m·NEI 50.660592 ·109 ( )2
xx m·NEI 4 ·1012
Área ( )2m 8 ( )2zz m·NEI 3.36 ·109
ν 0.2 ν 0.2
E ( )2m/N 29 · 109 E ( )2m/N 29 · 109
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.28. Propiedades de puente de dos vanos de 25 m y 8.5 m de altura.
Las secciones equivalentes que resultan al resolver los sistemas de ecuaciones
(5.2.1) y (5.2.2) para el tablero y los estribos respectivamente son:
- Tablero:
h = 1.6188 m
b = 4.9421 m

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
172
- Estribos:
h = 15.459 m
b = 0.448 m
Una vez definidas las secciones equivalentes se procede a la resolución de los
distintos problemas según sea el modelo de carga o el modelado del terreno que se
utiliza.
a) Apoyos rígidos y modelo de carga puntual.
Procediendo de la misma forma que en los apartados anteriores, se muestra en
primer lugar las frecuencias naturales correspondientes:
Modo de vibración Frecuencia natural (Hz)
1 12.12f1 =
2 18.17f2 =
3 96.20f3 =
4 60.21f4 =
Utilizando la ecuación (2.4.6) con
f1 se obtiene δ = 0.000525 (con α = 0).
Tabla 5.29. Frecuencias naturales del puente de dos vanos de 25 m y 8.5 m de altura (empotrado).
El desplazamiento máximo en la dirección y en el centro de los dos vanos es:
VANO δmax (m) tδmax (s)
1 - 2.9111·10-4 0.2466
2 - 2.8704·10-4 2.1086
Tabla 5.30. Flecha máxima en el centro de los vanos (THALYS, v =100 m/s, caso a))
La evolución de dicho desplazamiento a lo largo del tiempo se muestra en las
gráficas siguientes:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
173
0 0.5 1 1.5 2 2.5 3 3.5 4-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10
-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
Fig.5.74. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
0 0.5 1 1.5 2 2.5 3 3.5 4-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10
-4
tiempo (s) Fig.5.75. Desplazamiento vertical en el centro del vano 2 (THALYS, v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
174
b) Apoyos rígidos y modelo de carga puntual con deflexión de la vía y existencia
de traviesas.
Teniendo en cuenta la deflexión de la vía (datos en cuadro 5.1), el desplazamiento
vertical en el centro del primer vano es:
0 0.5 1 1.5 2 2.5 3 3.5 4-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
Fig.5.76. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso b)).
Tenemos que el máximo desplazamiento es -9.6696·10-4 m y se produce en t =
0.2607 s.
c) Apoyos elásticos y modelo de carga puntual.
Con el modelo que se muestra en la figura 5.48 (Keq = 8.9·109 N/m), las
frecuencias naturales y el coeficiente de Rayleigh δ son:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
175
Modo de vibración Frecuencia natural (Hz)
1 50.11f1 =
2 16.13f2 =
3 54.14f3 =
4 73.14f4 =
Utilizando la ecuación (2.4.6) con f1 se
obtiene δ = 0.00055.
Tabla.5.31. Frecuencias naturales del puente de dos vanos de 25 m y 8.5 m de altura (apoyos elásticos).
El desplazamiento vertical en el centro del vano 1 será:
0 0.5 1 1.5 2 2.5 3 3.5 4-4
-2
0
2x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
Fig.5.77. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso c)).
De la gráfica anterior se obtiene que δmax = -3.6689·10-4 m y tδmax = 0.2399 s.
d) Comparación de los casos a), b) y c).
Al igual que en los apartados anteriores, se procederá a una comparación de
resultados obtenidos en los casos a) y b)

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
176
0 0.5 1 1.5 2 2.5 3 3.5 4-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
caso a)caso b)
Fig.5.78. Comparación de los desplazamientos obtenidos en los casos a) y b).
De la figura anterior es posible comentar que el hecho de considerar las traviesas y
la vía en el modelo nos da resultados más perjudiciales para la estructura que en el caso
contrario. Ahora se comparan los casos a) y c)
0 0.5 1 1.5 2 2.5 3 3.5 4-4
-2
0
2x 10-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
caso a)caso c)
Fig.5.79. Comparación de los desplazamientos obtenidos en los casos a) y c).
Además de poderse observar que los desplazamientos sufren un incremento
cuando consideramos el suelo como un muelle de rigidez equivalente, también es
posible apreciar como la respuesta correspondiente al caso c) para un puente de dos
vanos de 25 m tiene menores acoplamientos en los efectos que provocan los ejes que los
puentes de dos vanos de 10 y 15 m.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
177
e) Barrido de velocidades del tren de cargas para el caso a).
Al igual que en los demás puntos se ha adoptado el rango de velocidad siguiente:
v ∈ ( ) ( ) h/Km 486126 s/m 13535 ÷≡÷ , con un incremento ∆v = 5 m/s (18 km/h).
Realizando los distintos análisis para las velocidades mostradas, se obtiene las
siguientes flechas dinámicas máximas maxdin,δ . En cuanto a la flecha estática máxima
maxest,δ , utilizada para calcular los coeficientes de impacto Φ según la ecuación (5.1.2),
se ha calculado realizando un análisis con v = 2m/s.
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Coeficiente de
impacto Φ
2 7.2 - 2.8155 · 10- 4 --
35 126 - 2.9361 · 10- 4 1.0428
40 144 - 2.9479 · 10- 4 1.0470
45 162 - 2.8314 · 10- 4 1.0056
50 180 - 2.8936 · 10- 4 1.0277
55 198 - 2.8497 · 10- 4 1.0121
60 216 - 2.8762 · 10- 4 1.0216
65 234 - 2.8480 · 10- 4 1.0115
70 252 - 2.8439 · 10- 4 1.0101
75 270 - 2.8301· 10- 4 1.0052
80 288 - 2.8922 · 10- 4 1.0272
85 306 - 2.9530 · 10- 4 1.0488
90 324 - 2.9639 · 10- 4 1.0527
95 342 - 2.9394 · 10- 4 1.0440
100 360 - 2.9111 · 10- 4 1.0340
105 378 - 2.9176 · 10- 4 1.0363
110 396 - 3.2430 · 10- 4 1.1518
115 414 - 3.0038 · 10- 4 1.0669
120 432 - 3.0303 · 10- 4 1.0763
125 450 - 3.0304 · 10- 4 1.0763
130 468 - 3.0004 · 10- 4 1.0657
135 486 - 2.9429 · 10- 4 1.0452
Tabla 5.32. Flecha dinámica máxima y coeficiente de impacto para distintas velocidades.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
178
La velocidad que provoca las mayores solicitaciones, según la tabla 5.32 y la
figura 5.80, es v = 110 m/s. Esta velocidad se corresponde a la velocidad de riesgo dada
por la ecuación (4.3.1) correspondiente a i = 2. ( f0 = 12.12 Hz y dk = 18.7 m):
m/s 110 a próxima m/s 3.11312.12 · 2
18.7 v 2 i Para ⇒==⇒=
40 50 60 70 80 90 100 110 120 1301
1.02
1.04
1.06
1.08
1.1
1.12
1.14
1.16
v (m/s)
Coe
ficie
nte
de im
pact
o en
el v
ano
1
Barrido de velocidades
Fig.5.80. Coeficiente de impacto para distintas velocidades.
Al ser el coeficiente de impacto correspondiente a v =110 m/s sensiblemente
mayor que para las demás velocidades pertenecientes al rango, se decide mostrar
mediante la siguiente figura la evolución del desplazamiento vertical en el centro del
primer vano:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
179
0 0.5 1 1.5 2 2.5 3 3.5 4-4
-2
0
2x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1
v = 110 m/s
Fig.5.81. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 110 m/s, caso a)).
A raíz de la gráfica anterior se puede afirmar la existencia de fenómenos
resonantes en la estructura para v = 110 m/s en tanto en cuanto se produce un
acoplamiento de los efectos provocados por cada uno de los ejes y una amplificación de
la respuesta a medida que aumenta el tiempo.
f) Respuesta del puente ante diferentes trenes de alta velocidad europeos.
Utilizando el modelo del caso a) para diferentes composiciones de trenes europeos
circulando a v =100 m/s.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
180
0 1 2 3 4 5 6-4
-2
0
2x 10
-4
tiempo (s)
Des
plaz
amie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)AVETALGOICE2THALYS
Fig.5.82. Desplazamiento vertical en el centro del vano 1 para distintos trenes (v = 100 m/s, caso a)).
Los desplazamientos máximos para cada composición son:
TREN δmax (m) tδmax (s)
AVE - 2.6576·10-4 0.2427
ICE2 - 3.9082 ·10-4 0.2005
TALGO AV - 3.1070·10-4 0.2116
THALYS - 2.9111·10-4 0.2466
Tabla 5.33. Flecha máxima para distintos trenes (v = 100 m/s, caso a)).
El tren que provoca la flecha máxima es, en este caso, el tren ICE2, mientras que
el menos perjudicial para la estructura es el AVE. Es posible comprobar como para
todos los vehículos el paso de la primera locomotora provoca un mayor daño que el
paso de la segunda.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
181
5.2.6. Puente de dos vanos de 25 metros cada uno y estribos de 12 metros.
El esquema de la estructura que se va a estudiar es el siguiente:
25
12
XX
Y
A B C
25
Vano 2Vano 1
D EA
Fig.5.83. Esquema del puente de dos vanos de 25 m y 12 m de altura.
Resolvemos el problema para el caso en que se utiliza el modelo de carga puntual
y empotramiento en la base de los estribos. En primer lugar se realiza un análisis modal
para obtener las frecuencias naturales de la estructura.
Modo de vibración Frecuencia natural (Hz)
1 50.10f1 =
2 68.10f2 =
3 32.11f3 =
4 48.12f4 =
Utilizando la ecuación (2.4.6) con
f1 se obtiene δ = 0.00061 (con α = 0).
Tabla 5.34. Frecuencias naturales del puente de dos vanos de 25 m y 12 m de altura (empotrado).
Los resultados correspondientes se presentan a continuación, siendo δmax =
3.0656·10-4 m y tδmax = 0.2467 s.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
182
0 0.5 1 1.5 2 2.5 3 3.5 4-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el n
odo
Fig.5.84. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
Se comparan los desplazamientos que produce un tren de alta velocidad a 100 m/s
sobre un puente de dos vanos de 25 m y una altura de 8.5 m y el mismo puente con una
altura de 12 m.
0 0.5 1 1.5 2 2.5 3 3.5 4-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
h = 12 mh = 8.5 m
Fig.5.85. Comparación del desplazamiento en puentes de distintas alturas (v = 100m/s, caso a), L = 25 m)

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
183
Como es lógico el puente de altura 12 m sufrirá un mayor desplazamiento que el
de 8.5. Sin embargo vemos como a medida que hemos aumentado la longitud del vano,
la diferencia entre las respuestas para puentes de 12 m y 8.5 m de altura se reducen.
5.3. Análisis de puentes de cuatro vanos.
Pasamos al análisis de puentes de cuatro vanos, con la diferencia de que ahora no
se estudiarán diferentes combinaciones de longitudes de vanos y de estribos, sino que el
único problema que resolveremos es el de un puente de cuatro vanos de 40 m de
longitud y 10 m de altura.
Se han utilizado modelos bidimensionales y en cuanto a las propiedades, para el
tablero se ha empleado las correspondientes al catálogo de puentes de referencia del
comité (ERRI D214 (a) [7]) y para las pilas se han obtenidos de otros proyectos
relacionados con la dinámica de puentes [3].
El intervalo de integración h que se ha elegido es el mismo que en el apartado 5.1,
por las mismas razones (h = h4 = 0.002 s). Además la tasa de amortiguamiento utilizada
en este caso es ζ1 = 5%.
5.3.1. Puente de cuatro vanos de 40 metros cada uno y estribos de 10 metros.
Se realizará el estudio de la estructura esquematizada en la figura 5.86.
40
10
X
Y
A B C ED
40 40 40
Vano 1 Vano 2 Vano 3 Vano 4
Fig.5.86. Esquema del puente de cuatro vanos de 40 m y 10 m de altura.
Las propiedades para el tablero y estribos correspondientes a este caso son las
siguientes:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
184
Tablero Estribos
( )2zz m·NEI 2.801329 ·1011 ( )2
zz m·NEI 6 ·31736·1010
Área ( )2m 12 Área ( )2m 4.08
ν 0.2 ν 0.2
E ( )2m/N 29 · 109 E ( )2m/N 29 · 109
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.35. Propiedades del puente de cuatro vanos de 40 m y 10 m de altura.
Se definen las secciones rectangulares equivalentes que recogen las propiedades
mostradas.
- Tablero:
Resolviendo el sistema de ecuaciones (5.2.1) se obtiene:
h = 3.108 m
b = 3.861 m
- Estribos:
En este caso las ecuaciones que nos interesan son (Fig. 5.43):
3zz hb
121I = (5.3.1)
bhA =
Resolviendo el sistema de dos ecuaciones y dos incógnitas se obtiene:
h = 1.6119 m
b = 2.5312 m

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
185
Una vez definidas las secciones equivalentes se procede a la resolución de los
distintos problemas.
a) Apoyos rígidos y modelo de carga puntual.
Se modela el terreno mediante empotramientos, tal y como se muestra a
continuación:
X
Y
A B C ED
Fig.5.87. Modelo del terreno mediante empotramientos.
En primer lugar se ha realizado un análisis modal y se han obtenido las
frecuencias naturales que se recogen en el cuadro 5.36:
Modo de vibración Frecuencia natural (Hz)
1 95.31 =f
2 57.42 =f
3 05.53 =f
4 09.64 =f
Utilizando la ecuación (2.4.6) con
f1 se obtiene δ = 0.00403 (con α = 0).
Tabla 5.36. Frecuencias naturales del puente de cuatro vanos de 40 m y 10 m de altura (empotrado).
El desplazamiento máximo en la dirección y en el centro de los cuatro vanos es:
VANO δmax (m) tδmax (s)
1 - 1.3838·10-3 0.2656
2 - 1.030·10-3 2.3230
3 -9.8446·10-4 1.0938
4 -1.2101·10-3 3.1730
Tabla 5.37. Flecha máxima en el centro de cada vano (THALYS, v =100 m/s, caso a)).
La evolución de dicho desplazamiento en el centro de los cuatro vanos se muestra
en las gráficas siguientes:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
186
0 1 2 3 4 5 6-14
-12
-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
1 (m
)
Fig.5.88. Desplazamiento vertical en el centro del vano 1 (THALYS, v = 100 m/s, caso a)).
0 1 2 3 4 5 6-12
-10
-8
-6
-4
-2
0
2
4
6x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
2 (m
)
Fig.5.89. Desplazamiento vertical en el centro del vano 2 (THALYS, v = 100 m/s, caso a)).
0 1 2 3 4 5 6-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
3 (m
)
Fig.5.90. Desplazamiento vertical en el centro del vano 3 (THALYS, v = 100 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
187
0 1 2 3 4 5 6-14
-12
-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
4 (m
)
Fig.5.91. Desplazamiento vertical en el centro del vano 4 (THALYS, v = 100 m/s, caso a)).
En los siguientes apartados se ha decidido tener en cuenta únicamente los efectos
que se producen en el vano 4.
b) Apoyos elásticos y modelo de carga puntual con deflexión de la vía y
existencia de traviesas.
En este punto se ha modelado el terreno como muelles de rigidez equivalente (Keq
= 8.9·109 N/m) y además se ha tenido en cuenta la deflexión de la vía (datos en cuadro
5.1).
X
Y
A B C ED
Keq Keq Keq Keq Keq
Fig.5.92. Modelo del terreno mediante muelles de rigidez equivalente.
Al cambiar el modelo, se obtienen las nuevas frecuencias naturales.
Modo de vibración Frecuencia natural (Hz)
1 91.11 =f
2 28.42 =f
3 71.43 =f
4 58.54 =f
Tabla 5.38. Frecuencias naturales del puente de
cuatro vanos de 40 m y 10 m de altura (apoyos
elásticos).
Utilizando la ecuación (2.4.6) con
f1 se obtiene δ = 0.00835 (con α = 0)

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
188
El desplazamiento vertical en el centro del cuarto vano es:
0 1 2 3 4 5 6-5
-4
-3
-2
-1
0
1
2x 10-3
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
4 (m
)
Fig.5.93. Desplazamiento vertical en el centro del vano 4 (THALYS, v = 100 m/s, caso b)).
El máximo desplazamiento es – 4.5183·10-3 m y se produce en t = 3.0846 s. Se
comprueba que es más desfavorable el modelado de la estructura del apartado b) que el
correspondiente al apartado a), en tanto en cuanto los desplazamientos son mayores en
el primero que en el segundo.
c) Barrido de velocidades del tren de cargas para el caso a).
El rango de velocidades escogido es el que venimos utilizando en los apartados
anteriores: v ∈ ( ) ( ) h/Km 486126 s/m 13535 ÷≡÷ , con un incremento ∆v = 5 m/s
(18 km/h).
Realizando los distintos análisis para las velocidades mostradas, se obtiene las
siguientes flechas dinámicas máximas maxdin,δ .

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
189
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
35 126 - 1.2371· 10- 3 90 324 - 1.2913· 10- 3
40 144 - 1.2435 · 10- 3 95 342 - 1.2604· 10- 3
45 162 - 1.2544 · 10- 3 100 360 - 1.2101· 10- 3
50 180 - 1.2572 · 10- 3 105 378 - 1.2155· 10- 3
55 198 - 1.2561· 10- 3 110 396 - 1.2449· 10- 3
60 216 - 1.2649· 10- 3 115 414 - 1.2276· 10- 3
65 234 - 1.2727· 10- 3 120 432 - 1.2414· 10- 3
70 252 - 1.2781· 10- 3 125 450 - 1.2496· 10- 3
75 270 - 1.2664· 10- 3 130 468 - 1.2496· 10- 3
80 288 - 1.2823· 10- 3 135 486 - 1.2481· 10- 3
85 306 - 1.3018· 10- 3
Tabla 5.39. Flecha dinámica máxima para las distintas velocidades (THALYS, caso a))
La velocidad que provoca las mayores solicitaciones, según la tabla 5.39 y la
figura 5.94, es v = 85 m/s. Esta velocidad, utilizando la ecuación (4.3.1) y f0 = f1 = 3.95
Hz, no se corresponde con ninguna velocidad de riesgo. Según lo referenciado en el
apartado 4.3, los modos que pueden aportar en la respuesta del sistema son aquellos
cuyas frecuencias naturales son menores de 20 Hz. En este ejemplo tenemos que las
cuatro primeras frecuencias naturales cumplen esta condición, por tanto no será válido
considerar únicamente f1. Si aplicamos la ecuación (4.3.1) con i =1 y dk = 18.7 m se
obtiene que f0 = 4.54 Hz, frecuencia que está entre f1 y f2.
Hz 57.4fy Hz 95.3f entre Hz 54.41 · 18.785f m/s 85 y v 1 i Para 210 ==⇒==⇒==

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
190
40 50 60 70 80 90 100 110 120 130
1.2
1.22
1.24
1.26
1.28
1.3
1.32x 10-3
v (m/s)
desp
laza
mie
nto
max
imo
en e
l cen
tro d
el v
ano
4
Fig.5.94. Valor absoluto del desplazamiento máximo en el centro del vano 4 para distintas velocidades.
El desplazamiento en el centro del cuarto vano para v = 85 m/s se presenta en la
siguiente figura.
0 1 2 3 4 5 6-14
-12
-10
-8
-6
-4
-2
0
2
4x 10-4
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
4 (m
)
Fig.5.95. Desplazamiento vertical en el centro del vano 4 (THALYS, v = 85 m/s, caso a)).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
191
Se puede ver que, aunque no haya un acoplamiento significativo de los efectos que
provocan los ejes de los vagones centrales, si hay una amplificación considerable del
desplazamiento provocado por la primera y la segundo locomotora.
5.4. Estudio de un viaducto isostático de 15 metros de luz.
Una vez que hemos hecho un estudio paramétrico de distintas tipologías de
puentes a los que se le ha cambiado el número de vanos, la longitud y la altura de los
mismos, se procede al estudio de puentes isostáticos. Se decide estudiar este tipo de
tipologías porque son las más sencillas y se utilizaron, en el estudio original de la UIC,
para obtener las expresiones del coeficiente de impacto. Además en (Dinámica de
puente de ferrocarril para alta velocidad, J. Domínguez [4]) se recogen los resultados
para este tipo de puentes, con lo cual se podrá hacer una validación de los métodos
utilizados en este proyecto. Por otro lado, en estas estructuras se puede estudiar de
forma clara los fenómenos resonantes gracias a las hipótesis simplificadas descritas en
los apartados 4.2 y 4.3.
El modelo bidimensional utilizado se representa en la figura 5.96. Se observa que
con este modelo únicamente se tiene en cuenta los efectos del tablero, mientras que no
se modelan los estribos.
X
Y
L
Fig.5.96. Modelo bidimensional de los puentes isostáticos.
Además se ha empleado las propiedades del catálogo de puentes de referencia del
comité (ERRI D214 (a) [7]) sobre efectos dinámicos producidos en puentes de
ferrocarril para velocidades superiores a 200 km/h.
Las propiedades son:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
192
Tablero
( )2zz m·NEI 7694081 ·103
Área ( )2m 6
( )Hzf0 5
ν 0.2
E ( )2m/N 29 · 109
( )3m/kgρ 2500
Tabla 5.40. Propiedades puente isostático de 15 m de luz.
Con estas propiedades se obtiene una sección equivalente con las siguientes
características (ec. 5.2.1):
Fig.5.97. Sección equivalente del tablero.
En los cálculos se ha trabajado con modelos sencillos en los cuales no se ha tenido
en cuenta la deflexión de la vía ante el paso del tren, sino que únicamente se ha utilizado
el modelo de carga puntual. Esto se ha hecho así porque los resultados expuestos en
(Dinámica de puente de ferrocarril para alta velocidad, J. Domínguez [4]) se han
obtenido de esta forma.
El intervalo de integración h que se ha elegido es h = 0.002 y la tasa de
amortiguamiento estructural adoptada es ζ1 = 2%.
Notar que este mismo puente es el que se utilizó en el ejemplo del apartado 4.2.
En primer lugar vamos a comparar los desplazamientos que se han obtenido en este
proyecto y los expuestos en la Tesis de J. Domínguez [4]. Posteriormente expondremos
los distintos resultados que se obtienen al hacer barridos de velocidad con distintos
trenes reales.
h = 0.7284 m
b = 8.2368 m
b
Z
Yh

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
193
5.4.1. Comparación de los resultados y validación de la metodología usada.
Los resultados que se obtiene cuando una carga aislada de valor F = 195000 N
circula a una velocidad v = 220 km/h sobre el puente de 15 m de luz se compararán con
los resultados extraídos de la Tesis Doctoral de Jaime Domínguez [4] para la misma
carga y el mismo puente. Así se tiene:
0 1 2 3 4 5 6 7-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10-3
tiempo (s)
Des
plaz
amie
nto
en e
l cen
tro d
el v
ano
(m)
Fig.5.98. Desplazamiento en el centro del vano para carga aislada; v = 220 km/h; Fuente Propia.
Fig.5.99. Desplazamiento en el centro del vano para carga aislada; v = 220 km/h; Fuente: [4].

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
194
Ahora se comparará el desplazamiento vertical en el centro del puente isostático
correspondiente a un tren de cargas compuesto por diez cargas equiespaciadas a 16 m y
circulando a dos velocidades diferentes (v = 288 km/h y v = 360 km/h).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
tiempo (s)
desp
laza
mie
nto
en e
l cen
tro d
el v
ano
(m)
Fig.5.100. Desplazamiento en el centro del vano para tren de cargas; v = 288 km/h y v = 360 km/h;
Fuente Propia.
Fig.5.101. Desplazamiento en el centro del vano para tren de cargas; v = 288 km/h y v = 360 km/h;
Fuente: [4].

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
195
A raíz de las figuras anteriores se puede afirmar que la metodología utilizada es
correcta.
5.4.2. Barrido de velocidades para diferentes tipos de trenes reales.
Se ha realizado un barrido de velocidades para los trenes ICE2 y THALYS. El
rango de velocidades es de v ∈ ( ) ( ) h/Km 6.5166.192 s/m 5.1435.53 ÷≡÷ , con un
incremento ∆v = 5 m/s (18 km/h). Además se han recogido en este rango las
velocidades de riesgo de resonancia correspondientes a i = 1 para cada uno de los
trenes. Estas velocidades se obtienen aplicando la ecuación (4.3.1) con f0 = 5 Hz,
dk,THALYS = 18.7 m y dk, ICE2 = 26.4 m:
m/s 321 5 · 1
26.4 v CE2I
m/s 93.5 5 · 1
18.7 v THALYS
ICE2riesgo,
THALYSriesgo,
==⇒
==⇒
a) Cálculo de desplazamientos con modelos de cargas puntuales.
Los desplazamientos máximos obtenidos en el centro del vano del puente de 15
metros de luz para las distintas composiciones de alta velocidad europeas se recogen en
la tabla y en la figura siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
196
THALYS ICE2
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
53.5 192.6 - 0.005027 53.5 192.6 - 0.005020
58.5 210.6 - 0.006018 58.5 210.6 - 0.005749
63.5 228.6 - 0.007025 63.5 228.6 - 0.006335
68.5 246.6 - 0.008014 68.5 246.6 - 0.006739
73.5 264.6 - 0.008763 73.5 264.6 - 0.006930
78.5 282.6 - 0.009276 78.5 282.6 - 0.006894
83.5 300.6 - 0.009543 83.5 300.6 - 0.006653
88.5 318.6 - 0.016331 88.5 318.6 - 0.006735
93.5 336.6 - 0.027396 93.5 336.6 - 0.007445
98.5 354.6 - 0.023656 98.5 354.6 - 0.007823
103.5 372.6 - 0.014867 103.5 372.6 - 0.007865
108.5 390.6 - 0.012167 108.5 390.6 - 0.008923
113.5 408.6 - 0.011484 113.5 408.6 - 0.009970
118.5 426.6 - 0.088857 118.5 426.6 - 0.011911
123.5 444.6 - 0.007685 123.5 444.6 - 0.015473
128.5 462.6 - 0.008827 128.5 462.6 - 0.024559
132 475.2 - 0.008493 132 475.2 - 0.028162
133.5 480.6 - 0.008019 133.5 480.6 - 0.027476
138.5 498.6 - 0.006052 138.5 498.6 - 0.018286
143.5 516.6 - 0.005275 143.5 516.6 - 0.012768
Tabla. 5.41. Flecha dinámica máxima para distintas velocidades (THALYS e ICE2).
Las mayores solicitaciones se producen en las correspondientes velocidades de
riesgo para cada uno de los trenes, provocando el tren ICE2 mayores flechas que el
THALYS. Esto se puede ver también en la siguiente figura:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
197
60 70 80 90 100 110 120 130 140
0.005
0.01
0.015
0.02
0.025
Velocidad (m/s)
Flec
ha m
axim
a en
el c
entro
del
van
o (m
)ICE2THALYS
Fig.5.102. Valor absoluto del desplazamiento máximo en el centro del vano para THALYS e ICE2.
La evolución del desplazamiento para vriesgo,THALYS y vriesgo,ICE2 es:
0 1 2 3 4 5 6 7 8-0.03
-0.02
-0.01
0
0.01
0.02
0.03
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
THALYS, v = 93.5 m/s
Fig.5.103. THALYS, v = 93.5 m/s. Fig.5.104. ICE2, v = 132 m/s.
Atendiendo a las figuras anteriores vemos como para ambos trenes circulando a
sus velocidades de riesgo se produce fenómenos resonantes.
b) Cálculo de las curvas ICSD.
En este apartado se estudiará el inverso del coeficiente de seguridad en
desplazamientos al que se denomina ICSD y se define de la siguiente forma:
0 1 2 3 4 5 6 7 8-0.03
-0.02
-0.01
0
0.01
0.02
0.03
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
(m)
ICE2, v = 132 m/s

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
198
tipo,din
real,dinICSDδ
δ= (5.4.1)
Donde:
- tipo,esttipo,din · δΦ=δ
- real,dinδ : Flecha máxima del puente para el tren de cargas real en el rango de
velocidades de circulación.
- tipo,estδ : Flecha máxima para el tren tipo LM 71.
- Φ : coeficiente de impacto.
De esta manera, en los casos en que el ICSD sea superior a 1.0, los efectos
dinámicos que dependieran exclusivamente de la respuesta en desplazamientos de la
estructura no quedarían cubiertos por el uso de la metodología simplificada del
coeficiente de impacto.
En este trabajo se calcularán las diferentes curvas ICSD para la norma UIC [32].
En primer lugar, para calcular la flecha tipo,estδ se observarán los efectos que provoca el
tren tipo LM 71 definido en la figura 4.1 sobre el puente de 15 m de luz. La situación
más desfavorable es la que se representa a continuación:
4.3 m 0.8 m 1.6 m 1.6 m 1.6 m 0.8 m
80 KN/m 80 KN/m
250 KN 250 KN 250 KN 250 KN
4.3 m
Fig.5.105. Situación más desfavorable del tren LM71 sobre el puente isostático de 15 m.
La flecha máxima se produce en el centro del vano y su valor es de:
m 01099.0tipo,est =δ
Para obtener el valor del coeficiente de impacto Φ se utiliza la expresión (4.1.2)
con Ld = 15 m:
2121.1=Φ

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
199
Las curvas ICSD para los dos trenes en cuestión son las siguientes:
60 70 80 90 100 110 120 130 1400
0.5
1
1.5
2
2.5
Velocidad(m/s)
Inve
rso
del C
oefic
ient
e de
Seg
urid
ad e
n D
espl
azam
ient
os (I
CS
D)
THALYSICE2
Fig.5.106.Curvas ICSD para el puente isostático de 15 m y los trenes THALYS e ICE2.
Obsérvese que según estos resultados la norma UIC quedaría fuera del rango
aceptable de valores (ICSD < 1.0) para velocidades de circulación entre 85 m/s y 105
m/s para el tren THALYS y para velocidades superiores a 120 m/s en el caso del tren
ICE2.
5.5. Estudio de un viaducto real: Viaducto E-II.
La dificultad existente en proponer metodologías simplificadas o comprobaciones
generales para el cálculo de las estructuras hiperestáticas (viaductos continuos,
estructuras tipo marco, puentes atirantados, etc.) obliga, dentro del ámbito normativo
actual, a la realización de cálculos dinámicos específicos completos para estas
estructuras.
La naturaleza del comportamiento dinámico de los viaductos hiperestáticos difiere
en gran medida del funcionamiento de los puentes isostáticos como ya se ha podido
comprobar en los apartados anteriores. Por un lado, mientras que en estos últimos suele
bastar con el primer modo de vibración, en una estructura hiperestática se obtienen

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
200
varios modos de vibración (por debajo de los 20 Hz) que tienen una contribución
significativa en la respuesta total del puente. Además en este tipo de puentes es difícil
predecir los fenómenos resonantes y por ello es muy complicado formular hipótesis
simplificadas sobre estos fenómenos al contrario que en los puentes isostáticos.
Por estas razones, y con la intención de ver el comportamiento dinámico de algún
puente real, se decide estudiar el viaducto continuo perteneciente a la línea de alta
velocidad de Zaragoza-Lérida, subtramo I, que recibe el nombre de viaducto E-II.
El puente está compuesto de una viga continua de 3 vanos de 20 m, 25 m y 25 m
de longitud respectivamente, haciendo un total de 70 m, apoyado en un extremo y
simplemente apoyado en el otro. En la siguiente figura se esquematiza el viaducto E-II.
X
Y
20 m 25 m 25 m
Fig.5.107. Características geométricas del viaducto E-II.
Según lo recogido en (Dinámica de puente de ferrocarril para alta velocidad, J.
Domínguez [4]) las propiedades de la sección transversal de dicho puente son las
siguientes:
Sección transversal
( )4zz mI 1.531
Área ( )2m 6.362
ν 0.2
E ( )2m/N 41.188 · 109
( )3m/kgρ 2500
Tabla 5.42. Propiedades viaducto E-II

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
201
Se ha tenido en cuenta la existencia de una carga muerta debida al balasto y a
otros elementos cuyo valor es Kg 10 · 35.12C 3muerta = . Como ya se comento en el punto
4.7, se definirá una densidad equivalente ρeq de la forma siguiente:
muertahorminicsec C·AP +ρ= (5.5.1)
ini
cseceq A
P=ρ (5.5.2)
Donde: - Aini = A = 6.362 m2
- ρhorm = ρ = 2500 Kg/m3
Se obtiene:
3eq Kg/m 21.4441=ρ
Con estas propiedades y resolviendo el sistema de ecuaciones (5.2.1) se obtiene
una sección equivalente con las siguientes características:
Fig.5.108. Sección equivalente del tablero
Se ha utilizado el modelo de carga puntual para realizar los análisis
correspondientes y el intervalo de integración utilizado es h = 0.002 s. Además se ha
adoptado una tasa de amortiguamiento estructural correspondiente al primer modo de ζ1
= 1%.
Se han realizado dos barridos de velocidades con los trenes THALYS y TALGO
AV respectivamente. Al ser las características del THALYS muy similares a las del
AVE, se podrá observar el comportamiento dinámico del viaducto real ante el paso de
dos composiciones que en la realidad pueden circular sobre él.
h = 1.699 m
b = 3.744 m
b
Z
Yh

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
202
En primer lugar se ha realizado un análisis modal para obtener las frecuencias
naturales más representativas.
Modo de vibración Frecuencia natural (Hz)
1 029.4f1 =
2 87.5f2 =
3 35.8f3 =
4 78.15f4 =
Tabla 5.43. Frecuencias naturales del viaducto E-II.
Atendiendo al rango de velocidades utilizado es
v ∈ ( ) ( ) h/Km 396144 s/m 11040 ÷≡÷
con un incremento ∆v = 5 m/s (18 km/h). Además se han recogido en este rango
las velocidades de riesgo de resonancia correspondientes a i = 1 para cada uno de los
trenes. Estas velocidades se obtienen aplicando la ecuación (4.3.1) con f0 = f1= 4.029
Hz, dk,THALYS = 18.7 m y dk, TALGO = 13.14 m:
m/s 94.52 4.029 · 1
13.14 v AV ALGOT
m/s 75.34 4.029 · 1
18.7 v THALYS
TALGOriesgo,
THALYSriesgo,
==⇒
==⇒
a) Cálculo de desplazamientos con modelos de cargas puntuales.
Los desplazamientos máximos en el centro del segundo vano para cada una de las
velocidades de los dos trenes europeos se recogen en la siguiente tabla:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
203
THALYS TALGO AV
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
Velocidad
(m/s)
Velocidad
(km/h) maxdin,δ (m)
40 144 - 0.001140 40 144 - 0.001346
45 162 - 0.001161 45 162 - 0.001282
50 180 - 0.001167 50 180 - 0.001317
55 198 - 0.001397 52.94 190.58 - 0.001757
60 216 - 0.001199 55 198 - 0.001882
65 234 - 0.001219 60 216 - 0.001433
70 252 - 0.001578 65 234 - 0.001349
75.34 271.22 - 0.002682 70 252 - 0.001540
80 288 - 0.002142 75 270 - 0.001745
85 306 - 0.001524 80 288 - 0.001492
90 324 - 0.001667 85 306 - 0.001422
95 342 - 0.001970 90 324 - 0.001315
100 360 - 0.0014197 95 342 - 0.001454
105 378 - 0.001897 100 360 - 0.001424
110 396 - 0.002676 105 378 - 0.001494
110 396 - 0.001634
Tabla 5.44. Flecha dinámica máxima para distintas velocidades (THALYS y TALGO AV)
La representación de estos valores es la siguiente:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
204
40 50 60 70 80 90 100 1101
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3x 10-3
Velocidad (m/s)
Flec
ha m
axim
a en
el c
entro
del
seg
undo
van
o (m
)THALYSTALGO AV
Fig.5.109. Valor absoluto del desplazamiento máximo en el centro del vano (THALYS y TALGO AV).
En el caso del tren THALYS la flecha máxima se produce para la velocidad de
riesgo antes calculada (vriesgo,THALYS = 75.34 m/s) y para el TALGO AV se produce para
v = 55 m/s, siendo esta cercana a la velocidad de riesgo correspondiente (vriesgo,TALGO =
52.94 m/s). Además se puede apreciar como existen otras velocidades cuyos
desplazamientos correspondientes son muy parecidos a los máximos (v = 110 m/s para
THALYS y v = 75 m/s para TALGO AV). Se podría asimilar este fenómeno a la
contribución del segundo modo de vibración, ya que en el cálculo anterior de las
velocidades de riesgo únicamente se ha tenido en cuenta el primer modo de vibración
con f1. Así si utilizamos f0 = f2 =5.87 Hz, se obtiene:
m/s. 75 a próxima m/s 13.77 5.87 · 1
13.14 v AV ALGOT
m/s 110 a próxima m/s 8.091 5.87 · 1
18.7 v THALYS
TALGO,2riesgo,
THALYS,2riesgo,
⇒==⇒
⇒==⇒
Se confirma por tanto la contribución del segundo modo de vibración en el
comportamiento dinámico.
Otra conclusión es que, en el rango de velocidades estudiado, el THALYS
provoca desplazamiento máximos mayores que el TALGO AV.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
205
La evolución respecto al tiempo del desplazamiento vertical en el centro del
segundo vano para la composición THALYS a v = 75.34 m/s y para el TALGO AV a v
= 55 m/s es:
0 2 4 6 8 10 12-3
-2
-1
0
1
2
3x 10
-3
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
2
Fig.5.110. THALYS, v = 75.34 m/s Fig.5.111. TALGO AV, v = 55 m/s.
En ambos casos es posible ver como se produce una amplificación de la respuesta
a lo largo del tiempo, aunque no es tan acentuada como la que se podía observar en el
puente isostático.
b) Cálculo de las curvas ICSD.
Al igual que se hizo en el caso del puente isostático, se estudiará inverso del
coeficiente de seguridad en desplazamientos (ICSD) definido en la ecuación (5.4.1) para
la norma UIC [32]. En el cálculo de tipo,estδ se ha situado el tren tipo LM 71 de forma
que sea lo más desfavorable posible para el viaducto que estamos estudiando. En
concreto, la distribución es la que se presenta en la figura 5.112:
80 KN/m 80 KN/m250 KN 250 KN 250 KN 250 KN
0.8 1.6 1.6 1.6 0.8 9.354.3
Fig.5.112. Situación más desfavorable del tren LM71 sobre el viaducto E-II (cotas en m).
0 2 4 6 8 10 12-2
-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
tiempo (s)
desp
laza
mie
nto
verti
cal e
n el
cen
tro d
el v
ano
2

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
206
La flecha máxima es de:
m 004933.0tipo,est =δ
Para obtener el valor del coeficiente de impacto Φ se utiliza la expresión (4.1.2)
con Ld = 25 m:
12.1=Φ
Las curvas ICSD para los dos trenes en cuestión son las siguientes:
40 50 60 70 80 90 100 1100.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Velocidad(m/s)
Inve
rso
del C
oefic
ient
e de
Seg
urid
ad e
n D
espl
azam
ient
os (I
CS
D)
THALYSTALGO AV
Fig.5.113. Curvas ICSD para el viaducto E-II y los trenes THALYS y TALGO AV.
Obsérvese que según estos resultados la norma UIC estaría dentro del rango
aceptable de valores (ICSD < 1.0).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
207
5.6. Estudio de un viaducto con tablero de doble viga sobre el que
circulan dos trenes en sentido opuesto.
Para terminar se pretende estudiar el efecto que provoca en un puente el tránsito
de dos trenes circulando en sentido opuesto. La estructura objeto de nuestro estudio será
un puente de dos vanos de 30 m de longitud y unas pilas de 20 m de altura.
30
20
XX
Y
A B C
30Vano 2Vano 1
D E
Fig.5.114. Esquema del puente de dos vanos de 30 m y 20 m de altura.
Se ha considerado oportuno utilizar un tablero de doble viga artesa prefabricada de
hormigón con losa superior que se adecua a las características del puente (Fuente: [3]).
En la figura 5.115 se muestra la sección del tablero mencionada en la que se representan
las cotas en metros.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
208
2,75 2,71 3,08 2,71 2,75
0,22
0,36
5,79
8,04
0,25
0,23
2,35 2,35
1,435 1,435
14
Fig.5.115.Sección del tablero. Doble viga artesa de hormigón.
En cuanto a las pilas, serán de sección rectangular con rehundido tal y como se
puede comprobar en las figuras 5.116 y 5.117:
20
A A
Fig.5.116. Alzado de la pilas

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
209
La sección A-A es la siguiente:
3,8
2
0,3 0,3
0,45
0,45
11
Fig.5.117. Sección A-A de las pilas
Las propiedades de las secciones del tablero y de las pilas representadas
anteriormente son las siguientes:
Tablero Pilas
( )4zz mI 5.8488 ( )4
zz mI 2.1784
Área ( )2m 7.075 Área ( )2m 4.08
ν 0.2 ν 0.2
E ( )2m/N 35 · 109 E ( )2m/N 35 · 109
( )3m/kgρ 2500 ( )3m/kgρ 2500
Tabla 5.45. Propiedades viaducto con tablero de doble viga artesa de hormigón.
Entonces el puente que estamos estudiando tendrá el siguiente aspecto:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
210
Fig.5.118. Perspectiva viaducto con tablero de doble viga artesa de hormigón.
Fig.5.119. Alzado viaducto con tablero de doble viga artesa de hormigón

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
211
Se ha modelado el puente mediante un modelo tridimensional utilizando
elementos SHELL para el tablero y elementos BEAM para las pilas. En la siguiente
figura se muestra el modelo utilizado:
Y
XZ
Elemento SHELL
Elemento BEAM
Fig.5.120. Modelo viaducto 3D viaducto con tablero de doble viga artesa de hormigón
En la definición de las secciones equivalentes se ha fijado la anchura de la sección
correspondiente al tablero (b = 14 m) para así situar las cargas correspondientes a los
trenes en la misma posición que en el puente real. El exceso de área que tendrá esta
sección se verá compensado con la definición de una densidad equivalente ρeq, en la
cual se recogerá también el efecto de una carga muerta ( Kg 10 · 35.12C 3muerta = ) debida
al balasto. Se procede de la siguiente forma:
- Tablero
Conociendo la inercia según la tabla 5.45 y fijando b = 14 m se obtiene, aplicando
la ecuación de la inercia del sistema de ecuaciones (5.2.1), que h = 1.71 m. Es decir la
sección será:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
212
Fig.5.121. Sección equivalente del tablero (elemento SHELL).
El área de esta sección es 2final m 94.23A = . Como el área de la sección original
es 2ini m 075.7AA == , se define la siguiente densidad equivalente:
muertahorminicsec C·AP +ρ= (5.6.1)
final
cseceq A
P=ρ (5.6.2)
Nos queda que: 3
eq Kg/m 1255=ρ
Ésta es la densidad que se utilizará para el tablero en el programa de elementos
finitos.
- Pilas.
Resolviendo el sistema de ecuaciones (5.3.1) con las propiedades mostradas en la
tabla 5.45, la sección de las pilas será:
Fig.5.122. Sección equivalente de las pilas (elemento BEAM).
Para el modelado de los trenes de carga se ha utilizado el modelo de carga puntual
aplicando las cargas de los ejes a la distancia en la dirección z correspondiente a la
posición central entre carriles.
h = 1.71 m
b = 14 m
h = 1.6119 m
b = 2.3312 m
bZ
Yh
b
Z
X
h

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
213
El modelo real de los trenes es el siguiente:
Fig.5.123. Circulación de trenes sobre el puente.
Fig.5.124. Vista lateral del puente y los trenes.
Por otra parte el modelo que se ha utilizado es:

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
214
Y
XZ
V
V
14 m4.65 m
4.65 m
TREN 1
TREN 2
Fig.5.125. Modelo de cargas puntuales utilizado.
La composición que se ha utilizado para ambos trenes es la del THALYS. En
cuanto al intervalo de integración, se ha escogido h = 0.01 s, mientras que la tasa de
amortiguamiento estructural que se ha tenido en cuenta es del 5%.
Los resultados que se han obtenido cuando los trenes circulan a una velocidad de
100 m/s en los puntos que muestra la figura 5.126 se muestran a continuación:
Y
XZ
A
B
C
D
E
F
Fig.5.126. Puntos de estudio en el tablero.

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
215
El desplazamiento vertical en el punto A es:
0 0.5 1 1.5 2 2.5 3 3.5-7
-6
-5
-4
-3
-2
-1
0
1
2x 10
-4 PUNTO A
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.127. Desplazamiento vertical en el punto A (THALYS, v = 100 m/s).
En el punto B:
0 0.5 1 1.5 2 2.5 3 3.5-6
-4
-2
0
2x 10
-4 PUNTO B
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.128. Desplazamiento vertical en el punto B (THALYS, v = 100 m/s).
En el punto C:
0 0.5 1 1.5 2 2.5 3 3.5-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5 PUNTO C
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.129. Desplazamiento vertical en el punto C (THALYS, v = 100 m/s).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
216
En el punto D
0 0.5 1 1.5 2 2.5 3 3.5-14
-12
-10
-8
-6
-4
-2
0
2x 10
-5 PUNTO D
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.130. Desplazamiento vertical en el punto D (THALYS, v = 100 m/s).
En el punto E:
0 0.5 1 1.5 2 2.5 3 3.5-6
-4
-2
0
2x 10
-4 PUNTO E
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.131. Desplazamiento vertical en el punto E (THALYS, v = 100 m/s).
En el punto F:
0 0.5 1 1.5 2 2.5 3 3.5-7
-6
-5
-4
-3
-2
-1
0
1
2x 10
-4 PUNTO F
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s) Fig.5.132. Desplazamiento vertical en el punto F (THALYS, v = 100 m/s).

Análisis de distintas tipologías de puentes Proyecto Fin de Carrera
217
La comparación de los desplazamientos en todos los puntos es la siguiente:
0 0.5 1 1.5 2 2.5 3 3.5-7
-6
-5
-4
-3
-2
-1
0
1
2x 10
-4
Des
plaz
amie
nto
verti
cal (
m)
tiempo(s)
PUNTO APUNTO BPUNTO CPUNTO DPUNTO EPUNTO F
Fig.5.133. Comparación de la respuesta en los puntos de estudio.
Es posible ver como los desplazamientos provocados por el tren 1 y el tren 2 son
iguales, es decir, el desplazamiento en A, primer punto de estudio que ve el tren 1, es
igual al desplazamiento en F, siendo este punto de estudio por el que primero pasa el
tren 2. Lo mismo se puede decir con los puntos C y D y con los puntos B y E. Si
únicamente nos fijamos en los efectos que ocasiona el tren 1, la flecha máxima en cada
uno de los puntos es la siguiente:
PUNTO δmax (m) tδmax (s)
A - 6.4702·10-4 0.55
C - 1.3730·10-4 0.44
E - 5.5030··10-4 0.55
Tabla 5.46. Flecha máxima para los puntos de estudio correspondientes a tren 1.
Vemos como la máxima solicitación se produce cuando el tren 1 pasa por el punto
A. En cambio, la flecha de menor valor se da justo en el punto central del puente (punto
C).

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
218
6. Conclusiones y líneas de investigación propuestas.
Este proyecto se dirige a dos aspectos claramente diferenciados, pero a su vez
dependientes: la validación de programas de elementos finitos no comerciales para
análisis dinámicos con cargas dependientes del tiempo y el estudio de los efectos
producidos por las cargas del tráfico ferroviario sobre diferentes tipologías de puentes.
Se recapitula aquí las conclusiones más destacadas de este proyecto. Asimismo se
describen las posibles líneas de investigación abiertas para futuros trabajos.
6.1. Conclusiones de la investigación desarrollada.
Como resumen del trabajo realizado se presentan a continuación las conclusiones
generales que se extraen del mismo.
• Búsqueda y validación del programa de EF no comercial.
Después de haber estudiado dos programas de elementos finitos no comerciales,
CalculiX y FEAPpv, se ha hecho una comparación de ambos con un potente programa
comercial (ANSYS) y se ha decidido escoger el programa FEAPpv como el más idóneo
para nuestros intereses. Los motivos de esta decisión se explican en el apartado 3.3.
• Estudio de los efectos producidos por trenes de carga reales sobre diferentes
tipologías de puentes.
Se han estudiado diversas tipologías de puentes sometidos a la circulación de
diferentes composiciones reales, siendo la más utilizada la correspondiente al tren de
alta velocidad THALYS. Para su análisis se ha utilizado la metodología recogida en
(Dinámica de puente de ferrocarril para alta velocidad, J. Domínguez [4]).
Por una parte, se han extraído resultados acerca de cómo afecta la geometría de los
puentes, la interacción suelo-estructura y la interacción vehículo-estructura a la

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
219
respuesta de los mismos ante el paso de un tren de alta velocidad. También se ha
conseguido establecer ciertas nociones acerca de cuál es el impacto que se produce en la
estructura dependiendo de la velocidad que lleve el vehículo ferroviario.
Por otra parte, se han estudiado puente reales, diferenciado entre puentes
isostáticos, puentes continuos e hiperestáticos y puentes modelados
tridimensionalmente.
A lo largo del proyecto se han ido estableciendo múltiples conclusiones acerca de
muy diversos aspectos. A continuación vamos a ir viendo las más importantes:
En primer lugar decir que las mayores solicitaciones se producen cuando las
locomotoras de los trenes pasan por los puntos de estudio, debido al mayor
peso de éstas respecto a los vagones centrales.
Para longitudes de vano constantes, se tiene que cuanto mayor es la altura de
los estribos que forman el puente, mayores son los desplazamientos que se dan
en los vanos del tablero.
Para alturas de estribos constantes, se tiene que cuanto mayor es la longitud de
los vanos correspondientes mayores son los desplazamientos en los mismos.
Si se utilizan apoyos elásticos en los problemas con interacción suelo-
estructura en lugar de empotramientos, los desplazamientos obtenidos serán
mayores. Lo mismo ocurre si en la interacción vehículo-estructura tenemos en
cuenta los efectos asociados a la flexibilidad del carril, las traviesas y el
balasto.
La amplificación resonante en los puentes de ferrocarril es un fenómeno real
que se da con los trenes y puentes actuales.
El método del coeficiente de impacto Φ no es de aplicación en el campo de la
alta velocidad ferroviaria, pues no incluye los efectos resonantes. En estos
casos es necesario que, en el proyecto de puentes que presten servicio en estas

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
220
líneas, se realicen cálculos dinámicos específicos para estas estructuras, como
se ha hecho en este trabajo.
En puentes isostáticos se cumple que las velocidades del vehículo a las que se
producen los mayores efectos son predichas por hipótesis simplificadas que
explican las condiciones de resonancia y que están formuladas en los apartados
4.2 y 4.3.
En los puentes hiperestáticos es más difícil que se den fenómenos resonantes
significativos, por el número de modos a considerar y por la acción opuesta
que ejercen las cargas en distintos vanos.
Es posible ver que en los puentes hiperestáticos estudiados, si sólo hay una
frecuencia natural por debajo de 20 Hz, se cumple la condición de riesgo de
resonancia propuesta en puentes isostáticos (apartado 4.2 y 4.3); en el caso
contrario, es decir si hay más de una frecuencia natural por debajo de 20 Hz,
todas tienen una contribución significativa en la respuesta total del puente y no
se puede explicar el comportamiento mediante las condiciones de resonancia
para puentes isostáticos de los apartados 4.2 y 4.3. A pesar de esto, en muchas
ocasiones las velocidades que provocan los mayores efectos se aproximan
mucho a las velocidades de riesgo obtenidas con la ecuación (4.3.1) utilizando
como frecuencia fundamental f0 la correspondiente al primer modo de
vibración f1.
6.2. Líneas de investigación propuestas.
A partir del trabajo realizado en este proyecto se pueden plantear diversas líneas
de investigación, orientadas a profundizar y ampliar aspectos que quedan abiertos. Entre
estas líneas cabe señalar las siguientes:

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
221
Modelado del suelo mediante elementos de contorno.
La continuación de este trabajo sería la de realizar la conexión entre
suelo y estructura mediante una malla de elementos de contorno. Esto es
así porque los elementos de contorno funcionan mejor en estos casos que
los elementos finitos.
Para llevar a cabo esta línea de investigación se pretende incorporar al
código fuente del programa de EF, FEAPpv, funciones propias de los
elementos de contorno, de forma que se puedan utilizar ambos sistemas a
la vez.
Utilización de modelos de cálculo con interacción entre el vehículo y la
estructura.
Los modelos de cargas puntuales consideran que, en todo momento, las
cargas que transmiten las ruedas a los carriles son constantes, de valor
igual a la carga nominal. En la realidad esta acción es variable por el
efecto, entre otros, de la suspensión de los vehículos. Los modelos que
consideran estos fenómenos pueden ser de mayor o menor complejidad,
de forma que existen modelos completos en los cuales se contempla la
interacción entre los ejes de un mismo vagón y modelos simplificados, en
los cuales cada eje del tren es independiente del resto.
Las solicitaciones dinámicas obtenidas con los modelos de interacción
entre vehículo y estructura suelen ser inferiores a las correspondientes de
los modelos de cargas puntuales (sobretodo en puentes isostáticos). Estos
últimos son recomendables para la realización de cálculos preliminares,
ayudando a la detección de fenómenos resonantes, pero, de ordinario, sus
resultados se desvían en cierta medida del comportamiento real de la
estructura (son conservadores). Para una aproximación mejor, es
aconsejable la utilización de los métodos de interacción entre vehículo y
estructura.

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
222
MB,JB
LB
L
dtd
M,J
MB,JB
deB
dBd
Fig.6.1. Modelo completo de interacción vehículo-estructura.
KpCp
ms
mns
masa suspendida
masa no suspendida
Fig.6.2. Modelo simplificado de interacción vehículo-estructura.
Utilización de métodos simplificados basados en la impronta dinámica
de los trenes.
La impronta dinámica es una curva geométrica que caracteriza la
agresividad del tren en cuestión en relación a los efectos dinámicos
producidos en un puente de ferrocarril. Los métodos más utilizados son
el DER, LIR e IDP; su implementación es sencilla y es recomendable su
utilización para las tipologías isostáticas ya que facilita la compresión del

Conclusiones y líneas de investigación propuestas Proyecto Fin de Carrera
223
fenómeno de resonancia. Además su utilización facilita la configuración
del futuro espacio de interoperabilidad de redes ferroviarias europeo.
Utilización de técnicas de análisis modal.
Estos métodos se basan en la descomposición modal de la estructura y la
combinación de respuestas modales producidas por las cargas móviles.
Los cálculos se simplifican cuando se modela el puente mediante vigas
rectas. Gracias a estas técnicas es posible saber la contribución de cada
uno de los modos de vibración en estructuras hiperestáticas.

Anexo A Proyecto Fin de Carrera
224
Anexo A. Características de trenes de alta velocidad
europeos.
En este anexo se describirán las características más relevantes, según nuestro
punto de vista, de los trenes de alta velocidad ICE2, AVE y TALGO AV, habiéndose
descrito las características del THALYS en el apartado 4.6.
A.1. ICE 2.
El ICE es el ferrocarril alemán de alta velocidad. Las iniciales ICE significan Inter
City Express.
El tren fue desarrollado a partir del año 1985 por Siemens AG según las
indicaciones de los ferrocarriles federales alemanes. La primera generación, conocida
como ‘ICE 1’, alcanza una velocidad máxima de 280 km/h. Los trenes están formados
por dos unidades motrices, una en cada extremo, y entre 10 y 14 vagones. La capacidad
de los convoyes con 12 vagones es de 645 pasajeros. Los ferrocarriles alemanes utilizan
en la actualidad 60 trenes de este tipo.
Posteriormente se
desarrolló una variante del
primer tren, denominada
‘ICE 2’. La diferencia con
el primer tipo consiste en
que los convoyes pueden
ser divididos en dos
mitades iguales, para
aquellos trayectos en los
que interesa disponer a
partir de una determinada
ciudad, trenes con menor Fig. A.1. Tren de alta velocidad ICE 2
capacidad que se dirigen a
dos destinos diferentes. Ello se consigue dotando a los convoyes completos, que
disponen de una unidad motriz en cada extremo al igual que los ICE 1, de dos vagones

Anexo A Proyecto Fin de Carrera
225
con puesto de conducción situados en la mitad del tren. De esta forma, al dividir el tren
en dos, cada una de las dos partes dispone de una unidad motriz y un vagón con puesto
de conducción en el extremo opuesto, lo que le permite circular en ambos sentidos. Hay
disponibles 44 unidades de este tipo.
Más recientemente se ha
desarrollado el tren ‘ICE 3’, que
alcanza los 330 km/h y no dispone
de unidades motrices, sino que la
tracción es realizada a través de las
ruedas de cada uno de los vagones,
lo que confiere una mayor
estabilidad al tren. Existen 37 trenes
de este tipo, aunque hay otros 13 en
producción. Fig. A.2. Tren de alta velocidad ICE 3
En la siguiente tabla se presenta la carga por eje y la distancia a la cabeza
correspondiente al tren ICE 2:

Anexo A Proyecto Fin de Carrera
226
Eje lk Fi Eje lk Fi
1 0.00 195000 29 177.71 112000 2 3.00 195000 30 180.21 112000 3 11.46 195000 31 196.71 112000 4 14.46 195000 32 199.21 112000 5 19.31 112000 33 204.11 112000 6 21.81 112000 34 206.61 112000 7 38.31 112000 35 223.11 112000 8 40.81 112000 36 225.61 112000 9 45.71 112000 37 230.51 112000
10 48.21 112000 38 233.01 112000 11 64.71 112000 39 249.51 112000 12 67.21 112000 40 252.01 112000 13 72.11 112000 41 256.91 112000 14 74.61 112000 42 259.41 112000 15 91.11 112000 43 275.91 112000 16 93.61 112000 44 278.41 112000 17 98.51 112000 45 283.31 112000 18 101.01 112000 46 285.81 112000 19 117.51 112000 47 302.31 112000 20 120.01 112000 48 304.81 112000 21 124.91 112000 49 309.71 112000 22 127.41 112000 50 312.21 112000 23 143.91 112000 51 328.71 112000 24 146.41 112000 52 331.21 112000 25 151.31 112000 53 336.06 195000 26 153.81 112000 54 339.06 195000 27 170.31 112000 55 347.52 195000 28 172.81 112000 56 350.52 195000
Tabla A.1. Características tren ICE 2.
Donde lk es la distancia a la cabeza de la composición en m. y Fi es la carga por
eje en N.

Anexo A Proyecto Fin de Carrera
227
A.2. AVE.
AVE es el acrónimo de tren de Alta Velocidad Española. La palabra alude al
mismo tiempo a un ave, es decir a un pájaro, por la velocidad y trayectoria de su
desplazamiento. Está inspirado en los Shinkansen japoneses y en el TGV francés,
pionero en Europa de la alta velocidad.
El ave es un tren de tracción eléctrica de alta velocidad. Las unidades de la
primera línea puesta en servicio fueron fabricadas por Alstom, en su factoría de
Barcelona, para la compañía ferroviaria nacional española RENFE. La producción fue
de 18 trenes de la Serie 100 entre 1992 y 1995. Su velocidad máxima comercial es de
300 km/h y su velocidad récord de 356.8 km/h. Cada tren tiene una capacidad de 329
asientos y la longitud total del tren es de 200 m. Los remolques del tren son articulados
y tienen tracción en el 31 % de los ejes. Además el tren pesa unas 393 toneladas en
vacío y tiene un ancho de vía de 1435 mm.
Fig. A.3. AVE-Serie 100.
Los servicios del AVE se inauguraron el 20 de abril de 1992 entre Madrid y
Sevilla, coincidiendo con la Exposición Universal de Sevilla. Actualmente el AVE
cubre cinco rutas, que son parte de un plan de alta velocidad española, el cual pretende
unir Madrid con las principales ciudades de las costas atlántica y mediterránea y éstas
entre sí, con más de 7.000 km de vías de nueva construcción. Se prevé que al final de un

Anexo A Proyecto Fin de Carrera
228
plan que finaliza en 2015, toda la Península Ibérica (incluida Portugal) esté conectada a
través del AVE.
El modelo más reciente del AVE es la Serie 103, capaz de alcanzar una velocidad
de 350 km/h y cuyas características de tracción son muy similares a las del ICE 3. El
año de recepción del tren es el 2006 y su fabricante es Siemens, al igual que el ICE 3.
Tendrá la misma longitud que la Serie 100 pero tendrá capacidad para 404 pasajeros,
además de un sistema de tracción funcional y un peso de 425 toneladas.
Fig. A.4. Tren de alta velocidad AVE-103
La distancia de cada uno de los ejes a la cabeza y la carga por eje del tren AVE -
100 se recogen en la tabla siguiente:

Anexo A Proyecto Fin de Carrera
229
Eje lk Fi
1 0.00 172100
2 3.00 172100
3 14.00 170700
4 17.00 170700
5 20.28 131600
6 23.28 131600
7 38.98 161900
8 41.98 161900
9 57.68 169200
10 60.68 169200
11 76.38 167900
12 79.38 167900
13 95.08 160500
14 98.08 160500
15 113.78 167900
16 116.78 167900
17 132.48 169200
18 135.48 169200
19 151.18 161900
20 154.18 161900
21 169.88 131600
22 172.88 131600
23 176.16 170700
24 179.16 170700
25 190.16 172100
26 193.16 172100
Tabla A.2. Característica tren AVE.
Donde lk es la distancia a la cabeza de la composición en m. y Fi es la carga por
eje en N.

Anexo A Proyecto Fin de Carrera
230
A.3. TALGO AV.
El 22 de mayo de 2000 fue la fecha en la que se presentó el tren de alta velocidad
de Talgo: El TALGO – 350, siendo uno de los únicos en cumplir hoy en día las
especificaciones de RENFE para los trenes que circulan entre Madrid y la frontera
francesa.
Este tren es capaz de circular a 350 km/h, con alta aceleración lateral en curva y
puede circular tanto por vías AVE como por las de trazado convencional a 1.435 mm.
La locomotora es del tipo Bo‘Bo’ y fue desarrollada por la empresa ADtranz, mientras
que los remolques son pendulares de séptima generación. Entre sus características cabe
destacar su bajo centro de
gravedad, su menor peso por
plaza, lo que se traduce en
menos consumo energético,
presurización interior y ejes
con ruedas independientes con
suspensión primaria que están
permanentemente guiados
sobre la vía. Fig. A.5. Tren de alta velocidad TALGO AV.
La tabla donde se recogen las características del tren se muestra a continuación:

Anexo A Proyecto Fin de Carrera
231
Eje lk Fi
1 0.00 170000
2 2.65 170000 3 11.00 170000 4 13.65 170000 5 19.13 170000 6 28.10 170000 7 41.24 170000 8 54.38 170000 9 67.52 170000
10 80.66 170000 11 93.80 170000 12 106.94 170000 13 120.08 170000 14 133.22 170000 15 146.36 170000 16 155.33 170000 17 160.80 170000 18 163.45 170000 19 171.80 170000 20 174.45 170000
Tabla A.3. Característica TALGO AV
Donde lk es la distancia a la cabeza de la composición en m. y Fi es la carga por
eje en N.

Anexo B Proyecto Fin de Carrera
232
Anexo B. Descripción de la Hoja de EXCEL donde se
implementa las ecuaciones que recogen los efectos de la
deflexión de la vía, las traviesas y la flexibilidad del balasto.
La hoja de EXCEL, obtenida del Trabajo de Investigación tutelado [21], en la cual
se implementa las ecuaciones descritas en el apartado 4.6 tiene el siguiente aspecto:
Fig. B.1. Hoja de EXCEL donde se implementan las ecuaciones del apartado 4.6 (Unidades en S.I.).
Los datos utilizados en este caso han sido: Fi =170 KN, v = 100 m/s, d = 0.6 m, m0
= 620 Kg/m, EI = 1.28·107 N·m2 y α = 2.50·108 N/m2. En estos datos se ha tenido en
cuenta la inercia y la densidad de los dos carriles que conforman la vía.
Una vez que se tienen los valores de la curva φ(t )= P(t)/T para una traviesa en x =
0 m, se representa dicha curva:

Anexo B Proyecto Fin de Carrera
233
00,050,1
0,150,2
0,250,3
0,350,4
0,450,5
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04
tiempo (s)
P(t)/
T
Fig. B.2. Curva φ(t )= P(t)/T para traviesa en x = 0 m
Una vez que conocemos la distancia entre traviesas (d) y la velocidad del tren (v),
conocemos el desfase entre las curvas correspondientes a las demás traviesas (situadas a
x > 0 m) y podemos representarlas. Por ejemplo, para el puente de 20 m, se tiene las
siguientes curvas:
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
t(s)
P(t)/
T
Fig. B.3. Curvas φ(t ) para las traviesas que forman parte de un puente de 20 m.

Anexo C Proyecto Fin de Carrera
234
Anexo C. Descripción del programa encargado de realizar
la superposición de la respuesta correspondiente a una carga
aislada.
El programa, que se puede encontrar en [21], está formulado en FORTRAN y
gracias a él se puede conocer la respuesta de una estructura ante un tren de cargas
conociendo la respuesta de dicha estructura ante una carga aislada.
La pantalla de entrada de dicho programa es la siguiente:
Fig. C.1. Pantalla principal del programa en FORTRAN de superposición.
Como es posible observar, hay que introducir el nombre y la extensión del archivo
donde se recogen los resultados correspondientes a una carga aislada unidad (es decir,
hay que dividir los resultados obtenidos por el valor nominal de la carga). Como
segundo paso hay que introducir el nombre y la extensión del archivo donde se
guardarán los resultados de salida.
El archivo de entrada tendrá el siguiente aspecto:

Anexo C Proyecto Fin de Carrera
235
Fig. C.2. Archivo de entrada con la respuesta unidad de una carga aislada
La distancia incremental (dk) del tren THALYS, por ejemplo, aparece en la figura
siguiente:
170000
03141720.27523.27538.97541.97557.67560.675
1115.715.73 3 3 3 33.275
170000170000170000170000170000170000170000 163000163000 Fi (N)
lk (m)
dk (m)
Vagón central Vagón enlace Locomotora
Fig. C.3. Características del tren Thalys

Anexo C Proyecto Fin de Carrera
236
Es posible validar el programa que hemos utilizado mediante una ejemplo de un
puente isostático de un vano de 20 m de longitud con las siguientes propiedades: EI =
1.75 · 1010 N·m2, A = 1 m2, ρ = 2500 kg/m3, α = 0.25251, δ = 0.50500. La carga que
circula por el puente tiene un valor 300 KN y una velocidad de 90 m/s. Se ha realizado
un análisis considerando un tren de cinco cargas separadas 25 m unas de otras.
Así, en primer lugar se ha implementado estas cinco cargas en el programa de
elementos finitos FEAPpv y se ha realizado el análisis dinámico correspondiente,
obteniendo el desplazamiento en el centro del vano. En segundo lugar, se ha obtenido el
efecto de una única carga mediante FEAPpv y posteriormente se ha utilizado el
programa de superposición estudiado en este anexo. A raíz de los resultados mostrados
en la figura siguiente se puede concluir que la herramienta de la que hemos hecho uso
durante el proyecto da buenos resultados.
0 1 2 3 4 5 6 7-5
-4
-3
-2
-1
0
1x 10-4
tiempo (s)
Des
plaz
amie
nto
en e
l cen
tro d
el v
ano
(m)
con superposiciónsin superposición
Fig. C.4. Validación programa de superposición.

Anexo D Proyecto Fin de Carrera
237
Anexo D. Desarrollo de las soluciones teóricas de una viga
biapoyada y una viga en voladizo.
D.1. Viga biapoyada con carga vertical en el centro.
La solución teórica del problema se desarrollará utilizando los conocimientos de la
Elasticidad y Resistencia de materiales.
En primer lugar calculamos el grado de hiperelasticidad de la estructura objeto de
nuestro estudio.
)l3()rc3(h +−+= (D.1.1)
Donde: h = grado de hiperelasticidad.
r = reacciones de la estructura.
l = ecuaciones de libertades.
c = número de cortes en una estructura cerrada
para convertirla en abierta.
Si la estructura es la siguiente, tenemos que:
L/2
A
B
C
F
X
Z
L/2
XA
YA YC Fig.3.2. Reacciones de la viga biapoyada.

Anexo D Proyecto Fin de Carrera
238
isostática Estructura 0h 0l3r0c
⇒=⇒⎪⎭
⎪⎬
⎫
===
A continuación aplicaremos las ecuaciones de equilibrio y calcularemos las
reacciones en función de los datos del problema.
Las ecuaciones de equilibrio son:
∑∑∑
=
=
=
0M .3
0F .2
0F .1
A
Z
X
(D.1.2)
Sustituyendo en las ecuaciones anteriores se obtiene:
2/L·FL·Y 0M .3
YYF 0F .2
0X 0F .1
CA
CAZ
AX
=→=
+=→=
=→=
∑∑∑
Las reacciones obtenidas son:
2FY
2FY
0X
C
A
A
=
=
=
Una vez calculadas las reacciones se procede a la obtención de las leyes de
esfuerzos internos:
- Tramo AB:

Anexo D Proyecto Fin de Carrera
239
AX
0
F/2
NAB (x)
VAB (x)MAB (x)
Fig.3.3. Esfuerzos internos tramo AB
x·2F)x(M
2F)x(V
0)x(N
AB
AB
AB
=
−=
=
- Tramo BC:
L/2
B
F
A
X
0
F/2NBC (x)
VBC (x)MBC (x)
Fig.3.4. Esfuerzos internos tramo BC
2x·F
4L·Fx·Fx
2L
2F)x(M
2F)x(V
0)x(N
BC
BC
BC
−=−⎟⎠⎞
⎜⎝⎛ +=
=
=
Por último vamos a calcular el desplazamiento máximo en la dirección z de la viga
biapoyada que se producirá en el punto B. Para ello aplicamos el Principio de la
Fuerzas Virtuales (PFV).

Anexo D Proyecto Fin de Carrera
240
∫∫ ⎥⎦⎤
⎢⎣⎡+⎥⎦
⎤⎢⎣⎡ α+=δ+δ
L
v
L
vr
vv dx EI
)x(M )x(M)x(TEA
)x(N )x(N·R·F (D.1.3)
Donde:
Fv ≡ Fuerzas o momentos virtuales aplicadas a la estructura.
Rv ≡ Reacciones virtuales de la estructura.
δ ≡ Desplazamientos y giros reales asociados a las acciones exteriores virtuales.
δr ≡ Desplazamientos y giros reales asociados a las reacciones virtuales.
Nv (x) ≡ Axil del problema virtual.
Mv (x) ≡ Momento flector del problema virtual.
N (x) ≡ Axil del problema real.
M (x) ≡ Momento flector del problema real.
T (x) ≡ Temperatura problema real.
α ≡ Coeficiente expansión térmica.
E ≡ Módulo elasticidad.
A ≡ Área de la sección.
I ≡ Inercia de la sección.
Como nuestro propósito es obtener el desplazamiento en el punto B, el problema
virtual que tenemos que estudiar será el siguiente:
AX
Z
L/2
0
1/2 1/2
A C
B
F = 1
X
Z
L/2
Fig.3.5. Problema virtual
Resolviendo el problema virtual:

Anexo D Proyecto Fin de Carrera
241
Problema virtual Problema real
Tramos Nv Mv N M
AB 0 2x 0
2x·F
BC 0 2x
4L− 0
2x·F
Tabla.3.1. Esfuerzos del problema virtual y real.
Se sustituyen los resultados en el PFV:
( ) ( ) ( ) ( ) ∫∫ ⎟⎠⎞
⎜⎝⎛ −⎟
⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛=⎥⎦
⎤⎢⎣⎡ ↑+↑++↓δ
2L
0
2L
0CAAB EI
dx4x·F
4F·
2x
4L
EIdx
2x·F·
2xv·
21v·
21u·0·1 r
Como ( ) ( ) ( ) 0vvu CAA =↑=↑=r , el resultado final es:
EI48L·F 3
B ↓=δ (D.1.4)
D.2. Viga en voladizo con carga vertical en el extremo libre.
La solución teórica del problema se presenta en los siguientes párrafos.
Atendiendo a la figura siguiente, podemos calcular el grado de hiperelasticidad:

Anexo D Proyecto Fin de Carrera
242
A B
X
Z
L
XA
ZA
MA
Fig.3.12. Reacciones de la viga en voladizo.
Sustituimos en la ecuación (3.1.1) los siguientes valores:
isostática Estructura 0h 0l3r0c
⇒=⇒⎪⎭
⎪⎬
⎫
===
Aplicamos las ecuaciones de equilibrio y se obtiene las siguientes reacciones:
L·FM 0M .3
F Z 0F .2
0X 0F .1
AA
AZ
AX
−=→=
=→=
=→=
∑∑∑
A continuación se calculan las leyes de esfuerzos.
- Tramo AB
A
X
0
F
FLNAB (x)
VAB (x)MAB (x)
Fig.3.13. Esfuerzos internos en el tramo AB

Anexo D Proyecto Fin de Carrera
243
( )LxF)x(MF)x(V
0)x(N
AB
AB
AB
−=−=
=
Se calcula el desplazamiento vertical en el punto B utilizando el PFV (D.1.3).
Para ello se resuelve el siguiente problema virtual:
LA B
1X
Z
0
1
Fig.3.14. Problema virtual
Resolviendo el problema virtual:
Problema virtual Problema real
Tramos Nv Mv N M
AB 0 ( )Lx − 0 ( )LxF −
Tabla.3.3.Esfuerzos del problema virtual y real.
Sustituyendo los esfuerzos en el PFV:
( ) ( ) ( ) ( ) ( )[ ] ( ) ( )( ) ( )∫∫ −=−−=α−+↑++↓L
0
2L
0AAAB dxLx
EIF
EIdxLxF·Lx·Lv·1u·0v·1 r
Como ( ) ( ) ( ) 0vu AAA =α=↑=r , el desplazamiento en B será:
EI3
FL v3
B =↓ (D.1.5)

Bibliografía Proyecto Fin de Carrera
244
Bibliografía.
[1] ANSYS Release 8.0, ANSYS Release 8.0 Multiphysics. ANSYS Release 8.0
Documentacion. ANSYS, Inc., 2003.
[2] CalculiX, Programa de elementos finitos tridimensional. User’s Manual.
www.calculix.de. G. Dhondt and K. Witting, 1998.
[3] Chillón, Robert. Criterios de disposición de aparatos de dilatación de vía en
puentes de ferrocarril de alta velocidad. Estudios de tableros en tramos
rectos de puentes de ferrocarril. Escuela Técnica Superior de Ingenieros de
Caminos, Canales y Puertos de Barcelona (UPC), 2005.
[4] Domínguez, J. Dinámica de puentes de ferrocarril para alta velocidad:
métodos de cálculo y estudio de la resonancia. Tesis Doctoral. Escuela
Técnica Superior de Ingenieros de Caminos, Canales y Puertos de Madrid
(UPM), 2001. Publicada por la Asociación Nacional de Constructores
Independientes (ANCI).
[5] Domínguez, J. y Goicolea, J.M. Interacción vehículo-estructura en puentes
de ferrocarril: métodos de cálculo y valoración del sobre-amortiguamiento
añadido. Escuela Técnica Superior de Ingenieros de Caminos, Canales y
Puertos de Madrid (UPM).
[6] Domínguez, J. y Goicolea, J.M. Predicción de fenómenos resonantes en
puentes de ferrocarril. Escuela Técnica Superior de Ingenieros de Caminos,
Canales y Puertos de Madrid (UPM), 1999.
[7] ERRI D214 (a), Design of Railway Bridges for Speed up to 350 km/h ;
Dynamic loading effects includin resonance ; Final report. Draft c. Informe
técnico, Eupoean Rail Research Institute (ERRI), 1998. Comité D214 sobre
puentes de ferrocarril para velocidades superiores a 200 km/h.

Bibliografía Proyecto Fin de Carrera
245
[8] ERRI D214 (b), Ponts-rails pour vitesses > 200 km/h; recommandations
pour la détermination de l’amortissement de tabliers de ponts-rails. Informe
técnico, Eupoean Rail Research Institute (ERRI), 1998. Comité D214 sobre
puentes de ferrocarril para velocidades superiores a 200 km/h.
[9] ERRI D214 (c), Ponts-rails pour vitesses > 200 km/h; Calcul des ponts a
structures complexe au pasaje d’un convoy. Logiciels de calcul dynamique.
European Rail Research Institute (ERRI), 1999. Comité D214 sobre puentes
de ferrocarril para velocidades superiores a 200 km/h.
[10] ERRI D214 (d), Ponts-rails pour vitesses > 200 km/h; Etude numérique de
l’influence des irrégularités de voie dans es cas de résonance des ponts.
Informe técnico, European Rail Research Institute (ERRI), 1999. Comité
D214 sobre puentes de ferrocarril para velocidades superiores a 200 km/h.
[11] ERRI D214 (e), Ponts-rails pour vitesses > 200 km/h; Final report. Part b.
Proposition de fiche UIC 776-2R. Informe técnico, European Rail Research
Institute (ERRI), 1999. Comité D214 sobre puentes de ferrocarril para
velocidades superiores a 200 km/h.
[12] ERRI D214 (f). Bridges desings considerations for very high-speed trains:
Technical Specifications for Interoperability (Rolling Stock and
Infrastructure). Informe técnico, European Rail Research Institute (ERRI),
1999. Comité D214 sobre puentes de ferrocarril para velocidades superiores
a 200 km/h.
[13] ERRI D214 (g). Bridges desings considerations for very high-speed trains:
Rules for the Eurocode prEN 1991-2-6. Informe técnico, European Rail
Research Institute (ERRI), 1999. Comité D214 sobre puentes de ferrocarril
para velocidades superiores a 200 km/h.
[14] European Committee for Standardization: prEN 1991-2: EUROCODE 1-
Actions on structures, Part 2: Traffic load on bridges, 2002.

Bibliografía Proyecto Fin de Carrera
246
[15] FEAP v.7.1f. FEAP, Finite Element Analysis Program. User’s Manual.
www.ce.berkeley.edu/~rlt . R.L. Taylor and J.C Simó, 1999.
[16] FEAPpv, Finite Element Analysis Program Personal Version. User’s
Manual. www.ce.berkeley.edu/~rlt/feappv. R.L. Taylor, 2005.
[17] Ferrovie dello Statu: Sovraccarichi peri l calcolo dei ponti ferroviari, 1997.
[18] Fortran Edition, Guide Referente Manual, vesion 3.9.
www.kai.com/parallel/Kappro/guide/ . Kuck & Associates, Inc.
[19] Fryba, L.: Vibration problems in engineering. Van Nostrand, NY, 1955 (3.ª
ed.).
[20] Fryba, L.: Dynamics of railway bridges. Thomas Telford, 1996.
[21] Galvín Barrero, Pedro. Desarrollo y validación experimental de un modelo
numérico para problemas de propagación de ondas. Métodos de
identificación dinámica de estructuras a partir de la respuesta a carga de
servicio. Trabajo de investigación tutelado. . Escuela Superior de Ingenieros
Industriales de Sevilla. Universidad de Sevilla, 2005.
[22] García Orden, Juan Carlos. Dinámica no lineal de sistemas multicuerpo
flexibles mediante algoritmos conservativos. Tesis Doctoral, Escuela
Técnica Superior de Ingenieros de Caminos, Canales y Puertos de Madrid
(UPM), 1999.
[23] Goicolea, J.M., Domínguez, J., Navarro, J.A. y Gabaldón, F. Nuevos
métodos de cálculo dinámico para puentes de ferrocarril en las
instrucciones IAPF y Eurocódigo 1. Grupo de Mecánica Computacional,
Escuela Técnica Superior de Ingenieros de Caminos de Madrid (ETSICCP),
2002.

Bibliografía Proyecto Fin de Carrera
247
[24] Goicolea, J.M., Domínguez, J., Navarro, J.A. y Gabaldón, F. Modelos
numéricos para cálculo dinámico de puentes de ferrocarril de alta
velocidad.. Grupo de Mecánica Computacional, Escuela Técnica Superior de
Ingenieros de Caminos de Madrid (ETSICCP), 2002.
[25] IAPF 2001. Instrucción de acciones a considerar en el proyecto de puentes
de ferrocarril. Ministerio de Fomento, 2001. Borrador, pendiente de
publicación.
[26] IAPF-75. Instrucción relativa a las acciones a considerar en el proyecto de
puentes de ferrocarril. Ministerio de Obras Públicas y Urbanismo, 1975.
[27] MATLAB v.6.5. MATLAB, The language of Technical Computing; User
Guide. The MathWorks, Inc., 2002.
[28] Museros, P., Vivero, G., y Alarcón, E. (CEMIM). Propuesta del articulado a
la IAPF: Efectos dinámicos y Apéndice de cálculo dinámico. Informe
técnico, Comisión redactora de la IAPF 2000, 1998.
[29] Raya, J.M. Estudio comparativo de la respuesta dinámica de puentes con
diversas tipologías sometidos a cargas móviles con interacción suelo-
estructura. Proyecto fin de carrera. Escuela Superior de Ingenieros
Industriales de Sevilla. Universidad de Sevilla, 2005.
[30] Timoshenko, S.P. y Young, D.H.: Vibration problems in engineering. Van
Nostrand, NY, 1955 (3.ª ed.).
[31] UIC Code 702 - O. Schema de charges a prendre en consideration dans le
calcul des ouvrages sous rail sur le lignes internationales. Union
Internationale des Chemins de Fer (UIC), segunda edición, 1974.
[32] UIC Code 776-1 R. Charges a prendre en consideration dans le calcul des
ponts-rails. Union Internationale des Chemins de Fer (UIC), 1979.

Bibliografía Proyecto Fin de Carrera
248
[33] UNE-ENV 1991-3. Eurocódigo 1: Bases de proyecto y acciones en
estructuras; Parte 3: Acciones del tráfico en puentes. Comité Europeo de
Normalización, 1998. Publicado por AENOR.
[34] Zienkiewicz, O.C. y Taylor, R.L. The Finite Element Method (vols. 1 and 2).
Elsevier, Oxford, 2005.


















