CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓNvirtual.urbe.edu/tesispub/0095520/cap04.pdf · Una vez...
29
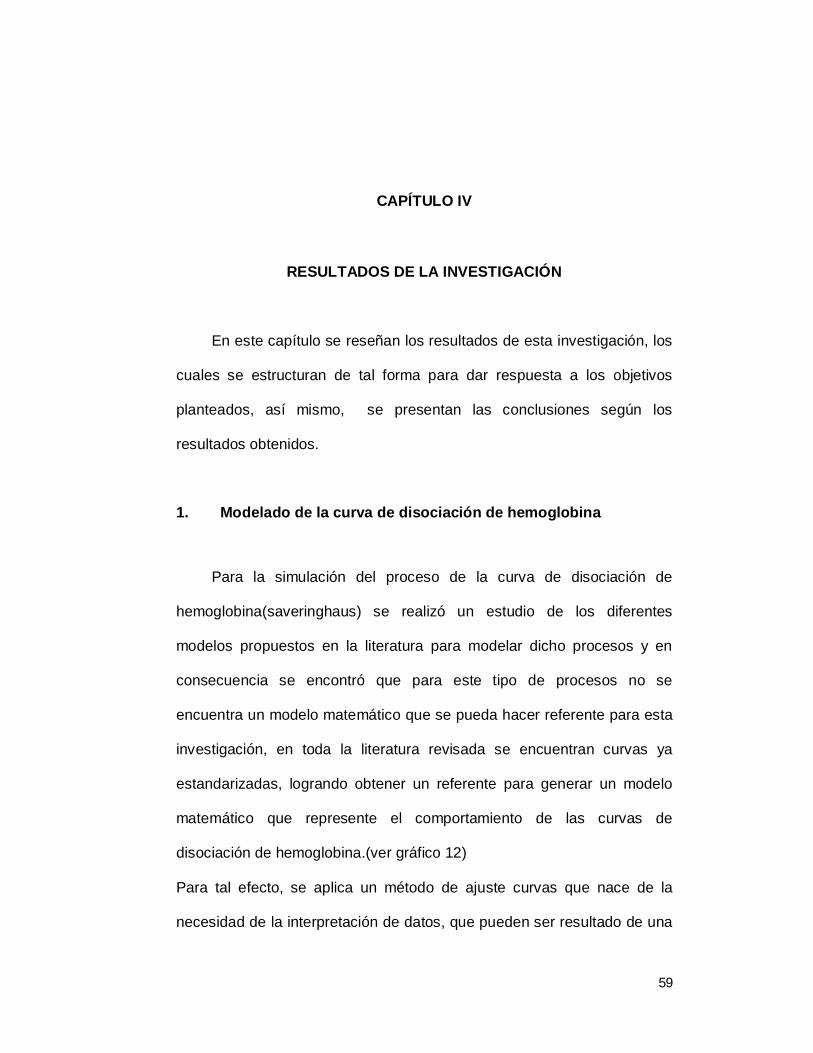
59 CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓN En este capítulo se reseñan los resultados de esta investigación, los cuales se estructuran de tal forma para dar respuesta a los objetivos planteados, así mismo, se presentan las conclusiones según los resultados obtenidos. 1. Modelado de la curva de disociación de hemoglobina Para la simulación del proceso de la curva de disociación de hemoglobina(saveringhaus) se realizó un estudio de los diferentes modelos propuestos en la literatura para modelar dicho procesos y en consecuencia se encontró que para este tipo de procesos no se encuentra un modelo matemático que se pueda hacer referente para esta investigación, en toda la literatura revisada se encuentran curvas ya estandarizadas, logrando obtener un referente para generar un modelo matemático que represente el comportamiento de las curvas de disociación de hemoglobina.(ver gráfico 12) Para tal efecto, se aplica un método de ajuste curvas que nace de la necesidad de la interpretación de datos, que pueden ser resultado de una
Transcript of CAPÍTULO IV RESULTADOS DE LA INVESTIGACIÓNvirtual.urbe.edu/tesispub/0095520/cap04.pdf · Una vez...
59
CAPÍTULO IV
RESULTADOS DE LA INVESTIGACIÓN
En este capítulo se reseñan los resultados de esta investigación, los
cuales se estructuran de tal forma para dar respuesta a los objetivos
planteados, así mismo, se presentan las conclusiones según los
resultados obtenidos.
1. Modelado de la curva de disociación de hemoglobina
Para la simulación del proceso de la curva de disociación de
hemoglobina(saveringhaus) se realizó un estudio de los diferentes
modelos propuestos en la literatura para modelar dicho procesos y en
consecuencia se encontró que para este tipo de procesos no se
encuentra un modelo matemático que se pueda hacer referente para esta
investigación, en toda la literatura revisada se encuentran curvas ya
estandarizadas, logrando obtener un referente para generar un modelo
matemático que represente el comportamiento de las curvas de
disociación de hemoglobina.(ver gráfico 12)
Para tal efecto, se aplica un método de ajuste curvas que nace de la
necesidad de la interpretación de datos, que pueden ser resultado de una
60
experimentación, de un análisis, de un proceso, etc. y estos datos se
especifican mejor mediante una ecuación que se ajusta a éstos y que
define su comportamiento. De esta manera, se abre paso a la calibración,
predicción y simulación de procesos.
Grafico 12. Relación entre la saturación de O2 y PaO2 Fuente: Ospino A, 2012.
Las técnicas desarrolladas para alcanzar este propósito se
implementaron por medio del Toolbox de ajuste de curvas de MATLAB
llamado Curve Fitting Toolbox (cftool) que ofrece herramientas gráficas y
funciones de línea de comandos para ajustar las curvas y superficies a los
datos. La caja de herramientas le permite realizar el análisis exploratorio
de datos, procesamiento previo y posterior a los datos del proceso,
comparar modelos candidatos, y eliminar los valores atípicos.
Después de crear un ajuste, se puede aplicar una variedad de
métodos de post-procesamiento para el trazado, interpolación y
extrapolación, estimación de intervalos de confianza, y el cálculo de
integrales y derivadas.
61
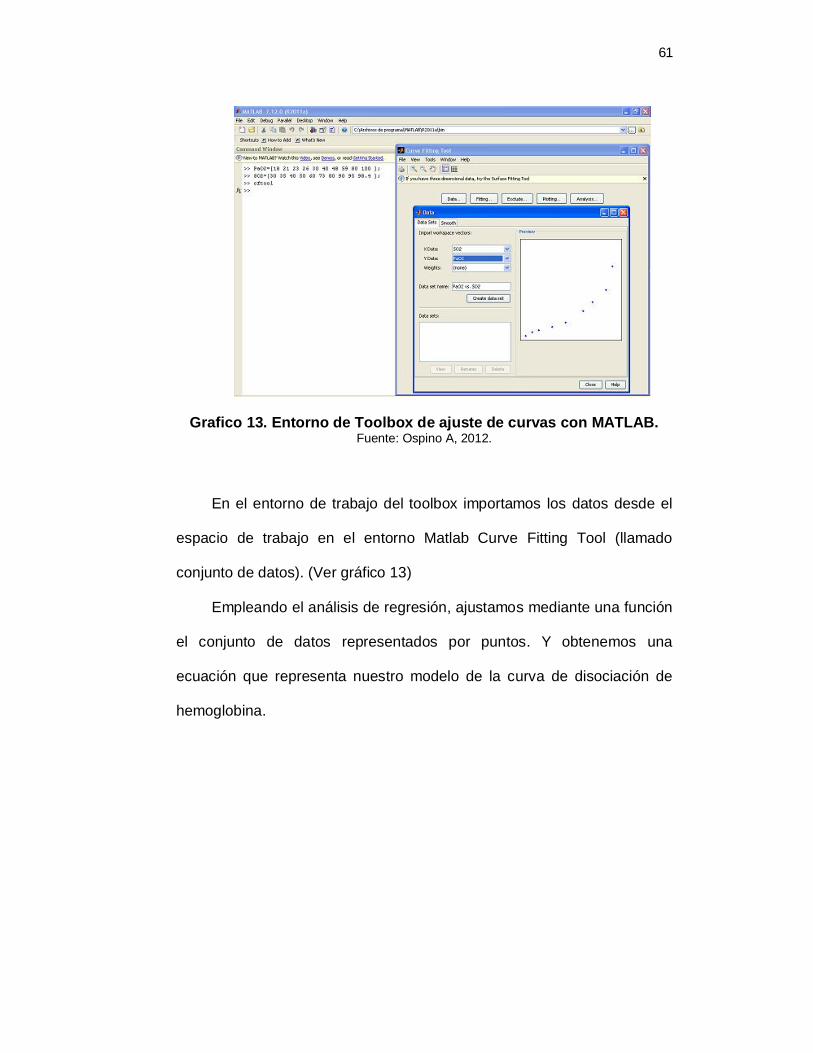
Grafico 13. Entorno de Toolbox de ajuste de curvas con MATLAB. Fuente: Ospino A, 2012.
En el entorno de trabajo del toolbox importamos los datos desde el
espacio de trabajo en el entorno Matlab Curve Fitting Tool (llamado
conjunto de datos). (Ver gráfico 13)
Empleando el análisis de regresión, ajustamos mediante una función
el conjunto de datos representados por puntos. Y obtenemos una
ecuación que representa nuestro modelo de la curva de disociación de
hemoglobina.
62
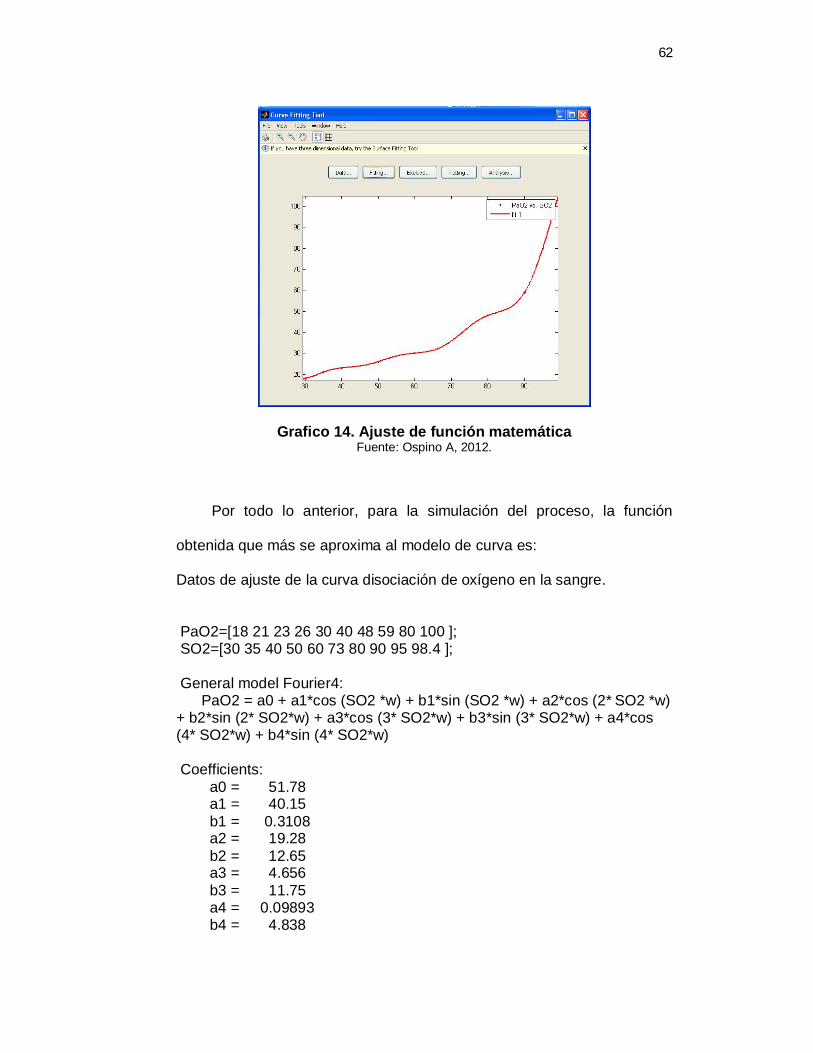
Grafico 14. Ajuste de función matemática Fuente: Ospino A, 2012.
Por todo lo anterior, para la simulación del proceso, la función
obtenida que más se aproxima al modelo de curva es:
Datos de ajuste de la curva disociación de oxígeno en la sangre. PaO2=[18 21 23 26 30 40 48 59 80 100 ]; SO2=[30 35 40 50 60 73 80 90 95 98.4 ]; General model Fourier4: PaO2 = a0 + a1*cos (SO2 *w) + b1*sin (SO2 *w) + a2*cos (2* SO2 *w) + b2*sin (2* SO2*w) + a3*cos (3* SO2*w) + b3*sin (3* SO2*w) + a4*cos (4* SO2*w) + b4*sin (4* SO2*w) Coefficients: a0 = 51.78 a1 = 40.15 b1 = 0.3108 a2 = 19.28 b2 = 12.65 a3 = 4.656 b3 = 11.75 a4 = 0.09893 b4 = 4.838
63
w = 0.06206 Goodness of fit: SSE: 9.823e-017 R-square: 1 Adjusted R-square: NaN RMSE: NaN
Una vez obtenida la ecuación que se ajusta al comportamiento de la
curva se calcula cuánto es la presión arterial de oxigeno actual según el
valor de saturación que se está midiendo en el paciente.
Con este valor procedemos a interactuar con la fórmula para hallar
en nuevo FiO2 que se necesita para estabilizar al paciente en un valor
normal.
푁푢푒푣표퐹퐼푂 =0.21 ∗ 푃푎푂 퐷푒푠푒푎푑표
푃푎푂 퐴푐푡푢푎푙
En el proceso para mezclar aire y oxígeno para producir el FiO2 se
utilizaron mezcladores de aire y oxígeno. De esta forma el cálculo de la
FiO2 en ellos sería fácil, mediante la fórmula:
퐹푖푂 =푂 푙 푚 ∗ 1 + 퐴푖푟푒 푙 푚 ∗ 0.21
푂 푙 푚 + 퐴푖푟푒 푙 푚
Así, por ejemplo, si suministramos un flujo de O2 de 20 L/min y un
flujo de aire de 40 L/min, tendremos un flujo total de gas de 60 L/min y un
flujo real de O2 de 20 + 8,4 L/min, que supone, haciendo una simple
división, una FiO2 de 0,47.
64
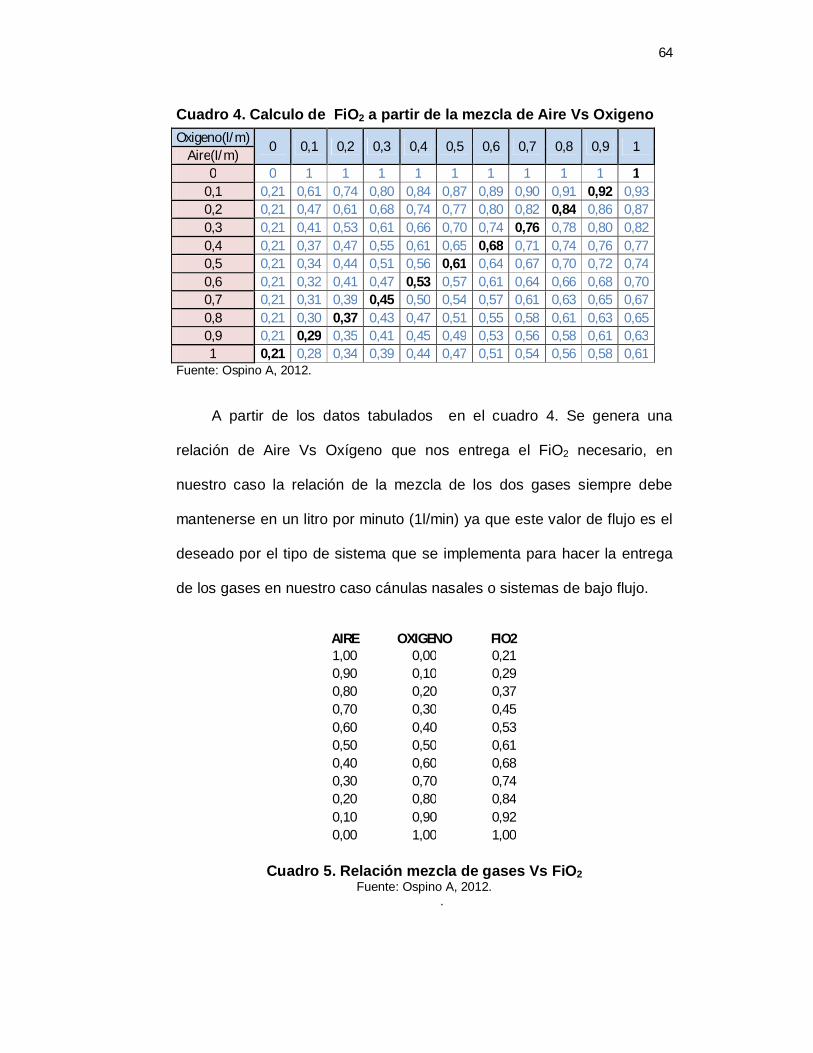
Cuadro 4. Calculo de FiO2 a partir de la mezcla de Aire Vs Oxigeno
Fuente: Ospino A, 2012.
A partir de los datos tabulados en el cuadro 4. Se genera una
relación de Aire Vs Oxígeno que nos entrega el FiO2 necesario, en
nuestro caso la relación de la mezcla de los dos gases siempre debe
mantenerse en un litro por minuto (1l/min) ya que este valor de flujo es el
deseado por el tipo de sistema que se implementa para hacer la entrega
de los gases en nuestro caso cánulas nasales o sistemas de bajo flujo.
AIRE
OXIGENO
FIO2
1,00 0,00 0,21 0,90 0,10 0,29 0,80 0,20 0,37 0,70 0,30 0,45 0,60 0,40 0,53 0,50 0,50 0,61 0,40 0,60 0,68 0,30 0,70 0,74 0,20 0,80 0,84 0,10 0,90 0,92 0,00 1,00 1,00
Cuadro 5. Relación mezcla de gases Vs FiO2
Fuente: Ospino A, 2012. .
Oxigeno(l/m) 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Aire(I/m) 0 0 1 1 1 1 1 1 1 1 1 1
0,1 0,21 0,61 0,74 0,80 0,84 0,87 0,89 0,90 0,91 0,92 0,93 0,2 0,21 0,47 0,61 0,68 0,74 0,77 0,80 0,82 0,84 0,86 0,87 0,3 0,21 0,41 0,53 0,61 0,66 0,70 0,74 0,76 0,78 0,80 0,82 0,4 0,21 0,37 0,47 0,55 0,61 0,65 0,68 0,71 0,74 0,76 0,77 0,5 0,21 0,34 0,44 0,51 0,56 0,61 0,64 0,67 0,70 0,72 0,74 0,6 0,21 0,32 0,41 0,47 0,53 0,57 0,61 0,64 0,66 0,68 0,70 0,7 0,21 0,31 0,39 0,45 0,50 0,54 0,57 0,61 0,63 0,65 0,67 0,8 0,21 0,30 0,37 0,43 0,47 0,51 0,55 0,58 0,61 0,63 0,65 0,9 0,21 0,29 0,35 0,41 0,45 0,49 0,53 0,56 0,58 0,61 0,63 1 0,21 0,28 0,34 0,39 0,44 0,47 0,51 0,54 0,56 0,58 0,61
65
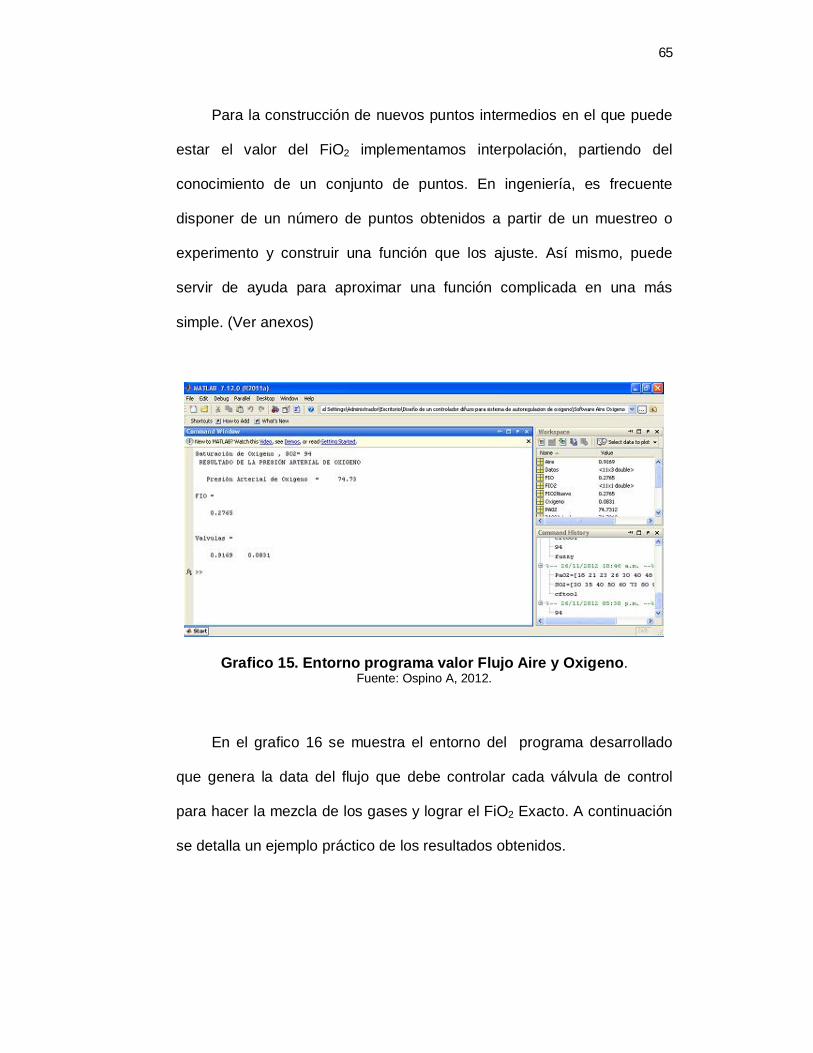
Para la construcción de nuevos puntos intermedios en el que puede
estar el valor del FiO2 implementamos interpolación, partiendo del
conocimiento de un conjunto de puntos. En ingeniería, es frecuente
disponer de un número de puntos obtenidos a partir de un muestreo o
experimento y construir una función que los ajuste. Así mismo, puede
servir de ayuda para aproximar una función complicada en una más
simple. (Ver anexos)
Grafico 15. Entorno programa valor Flujo Aire y Oxigeno. Fuente: Ospino A, 2012.
En el grafico 16 se muestra el entorno del programa desarrollado
que genera la data del flujo que debe controlar cada válvula de control
para hacer la mezcla de los gases y lograr el FiO2 Exacto. A continuación
se detalla un ejemplo práctico de los resultados obtenidos.

66
Saturación de Oxigeno, SO2= 94%
RESULTADO DE LA PRESIÓN ARTERIAL DE OXIGENO
Presión Arterial de Oxigeno = 74.73 mmHg
FIO2 = 0.2765
Válvulas =
Aire (l/m) Oxigeno (l/m)
0.9169 0.0831
Una vez valida la data se procede a implementar en Simulink un
sistema llamado “Modelo Matemático Curva de Severinghaus” que
contiene subsistemas donde se implementa los diferentes modelos
obtenidos en la investigación.
Grafico 16. Bloque del sistema de Modelo matemático Fuente: Ospino A, 2012.

67
Dentro del bloque principal se encuentra divido en tres subsistemas
como se aprecia en el grafico 17 donde tenemos como entrada la
saturación de oxígeno del paciente y de salida los valores de los flujos de
los dos gases en litros/minutos.
Grafico 17. Subsistemas del bloque principal del modelo. Fuente: Ospino A, 2012.
En el subsistema llamado “Curva de saveringhaus” se encuentra la
función matemática que se ajusta al modelo, en el cual se tiene como
entrada el valor de la Saturación de Oxigeno (SO2) y de salida el valor de
la presión arterial de oxigeno Actual (PaO2).

68
Grafico 18. Subsistemas Curva de Saveringhaus. Fuente: Ospino A, 2012.
En el presente subsistema es donde halla el nuevo valor de Fracción
inspirada de Oxigeno FiO2 donde se tiene como entrada el valor de la
presión arterial actual y se genera como salida el FiO2.
Grafico 19. Subsistemas para cálculo del Nuevo FiO2.
Fuente: Ospino A, 2012.

69
En este último subsistema es donde se genera la salida de la
cantidad de flujo necesaria de Aire y Oxigeno que son los valores que
entenderá como set-point el controlador.
Grafico 20. Oxigeno Vs FiO2. Fuente: Ospino A, 2012.
Graficando oxigeno (eje x) y FiO2 (eje Y) tenemos que se forma una
línea recta y se usa la ecuación de la recta para sacar el oxígeno en
cualquier lugar de la recta.
En Simulink su representación es de la siguiente manera:

70
Grafico 21. Entrada FiO2 salida Flujo de Oxigeno.
Fuente: Ospino A, 2012.
Como se muestra en el cuadro 8. Cuando aumenta el aire se
disminuye el oxígeno en igual proporción, a la salida se le coloca una
saturación en caso de que por decimales de un valor superior a 1 así que
nos queda que:
Aire=1-OXIGENO
El bloque completo en Simulink queda de la siguiente manera:
Grafico 22. Subsistemas de la cantidad de Aire y Oxigeno.
Fuente: Ospino A, 2012.

71
2. Modelado de la válvula de control
Se ha excitado la entrada del sistema para obtener la respuesta del
proceso, este resultado permitirá identificar un tipo de modelo dinámico.
La técnica que se usará para la identificación experimental está
relacionada con los métodos basados en la curva de reacción del
proceso, identificación no parámetrica, y son técnicas usadas en lazo
abierto, como es el caso del sistema a identificar.
Esta técnica se basa en la curva de respuesta, y son procedimientos
principalmente gráficos. La gran parte de los métodos de sintonización de
controladores se fundamentan en los parámetros de un modelo de orden
reducido, principalmente los más empleados son los de primer orden o
segundo orden más un tiempo muerto, estos modelos de orden reducido
permiten representar sistemas dinámicos de orden superior.
Grafico 23. Comportamiento de la válvula en lazo abierto.
Fuente: Ospino A, 2012.
72
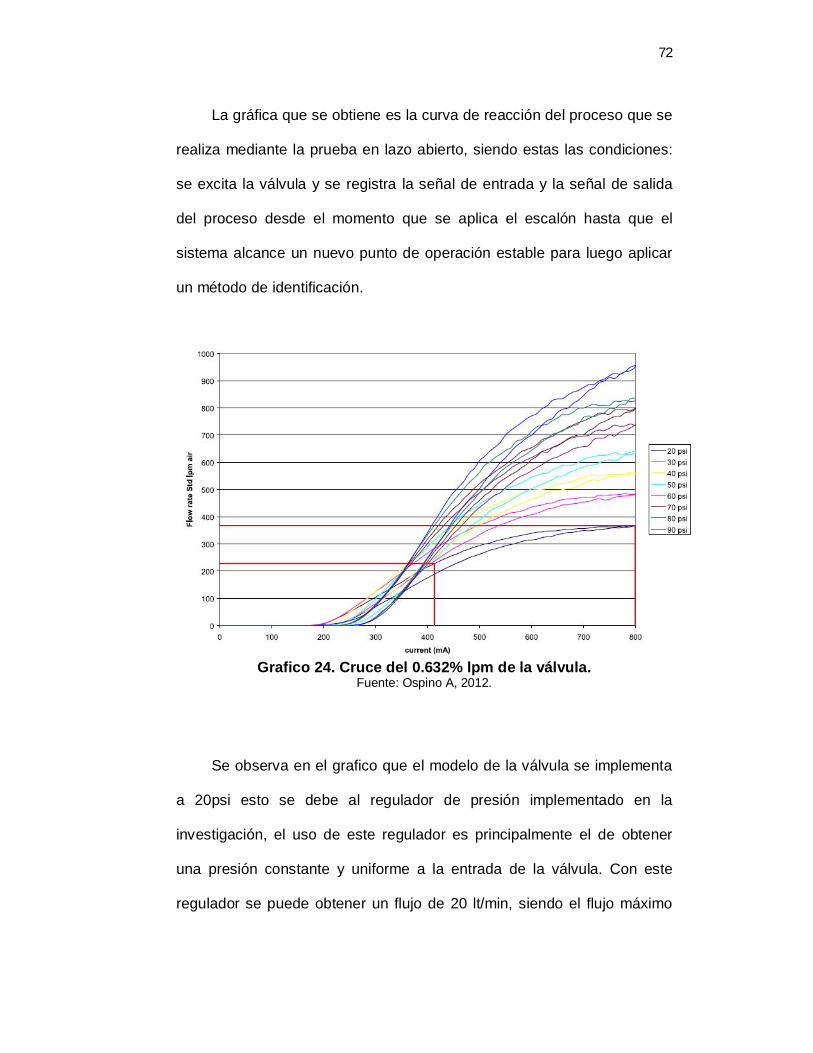
La gráfica que se obtiene es la curva de reacción del proceso que se
realiza mediante la prueba en lazo abierto, siendo estas las condiciones:
se excita la válvula y se registra la señal de entrada y la señal de salida
del proceso desde el momento que se aplica el escalón hasta que el
sistema alcance un nuevo punto de operación estable para luego aplicar
un método de identificación.
Grafico 24. Cruce del 0.632% lpm de la válvula.
Fuente: Ospino A, 2012.
Se observa en el grafico que el modelo de la válvula se implementa
a 20psi esto se debe al regulador de presión implementado en la
investigación, el uso de este regulador es principalmente el de obtener
una presión constante y uniforme a la entrada de la válvula. Con este
regulador se puede obtener un flujo de 20 lt/min, siendo el flujo máximo
73
que puede soportar el transmisor para su correcta medición. Esta prueba
se realizó con la válvula de control totalmente abierta y se logró obtener
una salida de 4.9v del transmisor, esto indica que por el transmisor circula
un flujo de 20lt/min aproximadamente.
El tipo de válvula que se usó para los ensayos pertenece a la familia
Teknocraft, y son usadas en diferentes industrias, incluyendo el campo de
la medicina.
2.1. Sintonización del controlador mediante Ziegler-Nichols
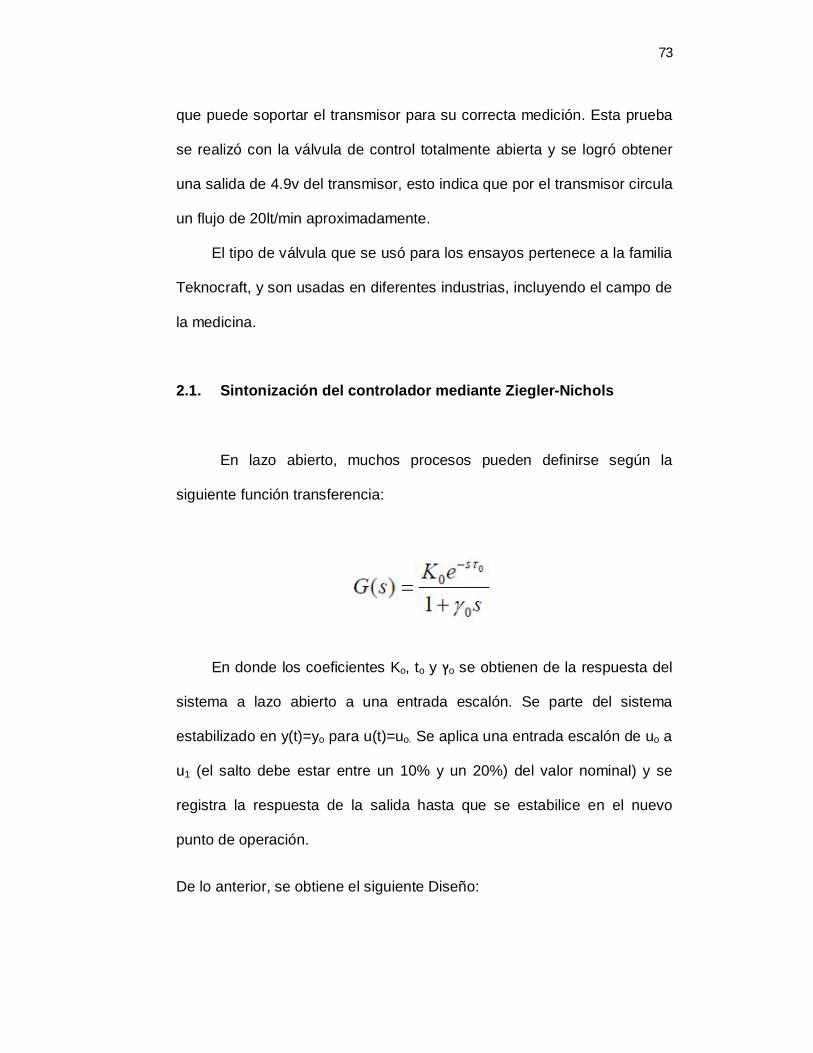
En lazo abierto, muchos procesos pueden definirse según la
siguiente función transferencia:
En donde los coeficientes Ko, to y ץo se obtienen de la respuesta del
sistema a lazo abierto a una entrada escalón. Se parte del sistema
estabilizado en y(t)=yo para u(t)=uo. Se aplica una entrada escalón de uo a
u1 (el salto debe estar entre un 10% y un 20%) del valor nominal) y se
registra la respuesta de la salida hasta que se estabilice en el nuevo
punto de operación.
De lo anterior, se obtiene el siguiente Diseño:

74
퐺 (푠) =0.612
260푠 + 1 푒
Según Ziegler-Nichols, la relación de estos coeficientes con los
parámetros del controlador son:
Grafico 25. Parámetros PID.
Fuente: Ospino A, 2012.
75
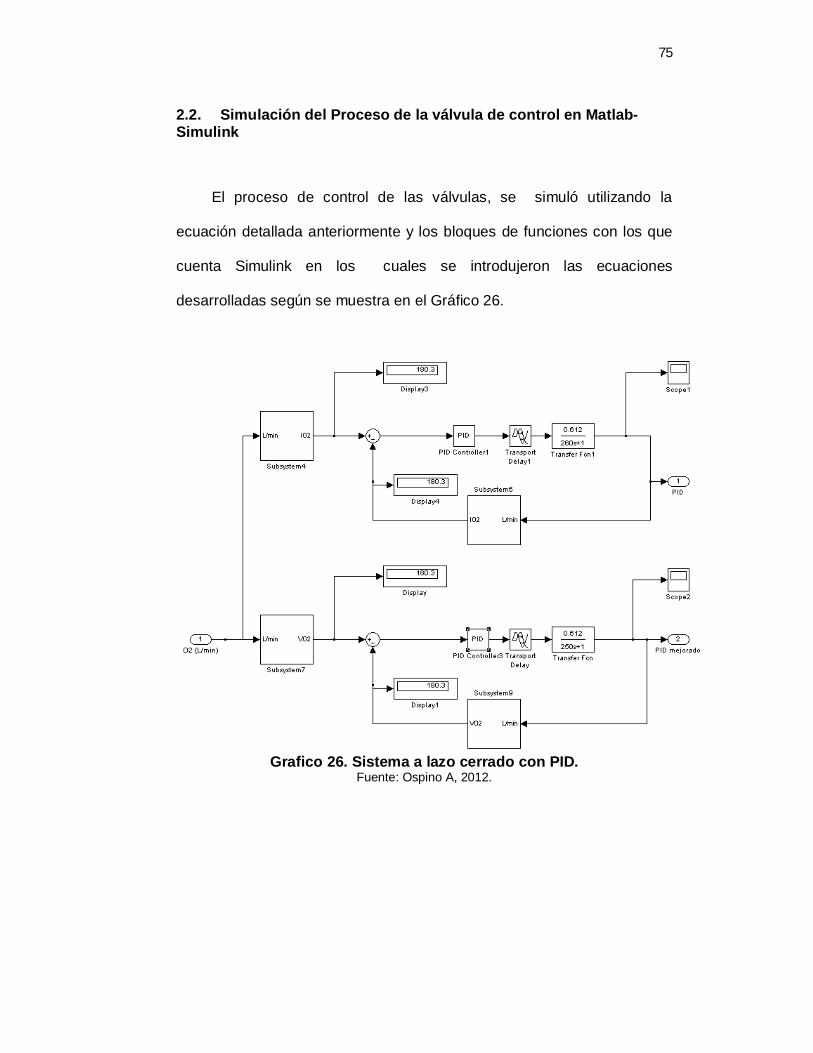
2.2. Simulación del Proceso de la válvula de control en Matlab-Simulink
El proceso de control de las válvulas, se simuló utilizando la
ecuación detallada anteriormente y los bloques de funciones con los que
cuenta Simulink en los cuales se introdujeron las ecuaciones
desarrolladas según se muestra en el Gráfico 26.
Grafico 26. Sistema a lazo cerrado con PID.
Fuente: Ospino A, 2012.

76
3. Función de transferencia del transmisor de Flujo
Lo que hace que estos transmisores de Flujo sean muy utilizados, es
que la salida siempre es lineal. La salida es directamente proporcional al
flujo aplicado; en la investigación se implementó un transmisor
electrónico, y ha se calibro para trabajar con alcance de 0 a 1L/min y con
salida de 4 a 20 mA.
Grafico 27. Función de Transferencia del Transmisor.
Fuente: Ospino A, 2012.
La señal más común utilizada en aplicaciones industriales es un
circuito de corriente de 2 alambres y 4-20 miliamperios (mA). Otras
señales utilizadas incluyen 1-5 voltios, 0.5 voltios, 0-10 voltios (sistema de
3 alambres) y 0 - 100 milivoltios (sistema de 4 alambres). En muchos
casos, el dispositivo de visualización, que está en el transmisor, puede
aceptar más de un tipo de salida; por ejemplo, 4 - 20 mA o 0 - 5 voltios. A
continuación se describe la función:
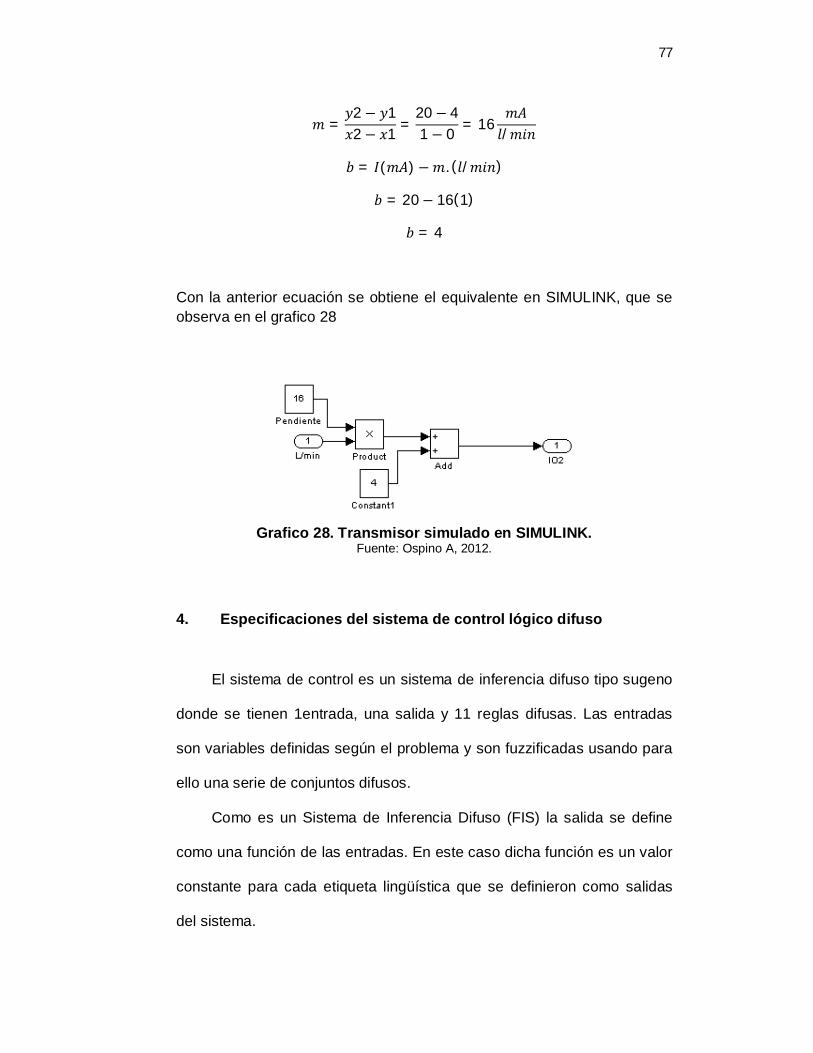
퐼(푚퐴) = 푚. (푙/푚푖푛) + 푏
77
푚 =푦2 − 푦1푥2 − 푥1 =
20 − 41 − 0 = 16
푚퐴푙/푚푖푛
푏 = 퐼(푚퐴) −푚. (푙/푚푖푛)
푏 = 20 − 16(1)
푏 = 4
Con la anterior ecuación se obtiene el equivalente en SIMULINK, que se observa en el grafico 28
Grafico 28. Transmisor simulado en SIMULINK.
Fuente: Ospino A, 2012.
4. Especificaciones del sistema de control lógico difuso
El sistema de control es un sistema de inferencia difuso tipo sugeno
donde se tienen 1entrada, una salida y 11 reglas difusas. Las entradas
son variables definidas según el problema y son fuzzificadas usando para
ello una serie de conjuntos difusos.
Como es un Sistema de Inferencia Difuso (FIS) la salida se define
como una función de las entradas. En este caso dicha función es un valor
constante para cada etiqueta lingüística que se definieron como salidas
del sistema.

78
El programa que genera el sistema de control se llama Ultimate1.fis
y se encuentra en el anexo. Este programa es desarrollado en Matlab con
su toolbox para lógica difusa. En el grafico 29 muestra el sistema de
inferencia difuso que genera Matlab.
Grafico 29. Sistema de inferencia difuso.
Fuente: Ospino A, 2012.
En la figura se observa al extremo izquierdo la entrada del sistema
(el error), en el centro el sistema de control y en el extremo derecho esta
la salida (apertura del blender).
4.1. Primera entrada: error
La primera entrada del sistema de control es el error. La referencia
es la saturación deseada que tiene que estar entre los rangos que se
programaron inicialmente y la saturación medida es el valor real del
paciente.

79
La ecuación para la referencia entonces seria:
Valormaximo + Valorminimo2
Para esta entrada se tienen 11 conjuntos con valores desde -5 hasta
5 dado que según lo acordado con los doctores, un paciente nunca va a
presentar una diferencia tan grande en su valor deseado y su valor
medido, como para que la ecuación de valores diferentes a este rango.
Los conjuntos son: cuando el error es muy negativo, cuando es
negativo, cuando es cero, cuando es positivo y cuando es muy positivo.
Grafico 30. Funciones de membresía primera entrada.
Fuente: Ospino A, 2012.
El grafico 30 muestra las funciones de membresía para la primera
entrada del sistema de inferencia difuso con sus respectivos rangos.

80
4.2. Salida: Movimiento del blender
La salida del blender es lo que se tiene que hacer con este
dispositivo, es decir, abrirlo o cerrarlo según las condiciones del sistema.
Se tiene 11 posibles valores para la salida del sistema que van
desde –5 hasta 5 debido a que según datos obtenidos con las enfermeras
del Centro Médico, ellas suben o bajan aproximadamente 5% el blender.
El grafico 31 muestra las funciones de membresía de la salida:
Grafico 31. Funciones de membresía de la salida.
Fuente: Ospino A, 2012.
4.3. Reglas difusas
El sistema tiene 11 reglas difusas las cuales se obtuvieron con la
ayuda de los doctores especialistas en anestesiología del Centro Médico
y haciendo el siguiente análisis:

81
Si el error es positivo quiere decir que la saturación medida es
menor a la saturación deseada quiere decir que el paciente
necesita un estímulo de oxígeno y se necesitaría abrir el blender.
Si el error es negativo quiere decir que la saturación medida es
mayor a la saturación deseada quiere decir que el paciente NO
necesita un estímulo de oxígeno y se necesitaría cerrar el blender.
Si el error es cero, quiere decir que la saturación medida es igual a
la deseada, quiere decir que no hay necesidad de hacer nada.
Haciendo el mismo análisis para cada una de las 11 etiquetas
lingüísticas en la que se dividió la primera entrada se generan las 11
reglas que definen el funcionamiento del sistema de inferencia difuso.
Como se muestra a continuación:
If (Error is 0) then (Salida is 0) (1) If (Error is -1) then (Salida is -1) (1) If (Error is -2) then (Salida is -2) (1) If (Error is -3) then (Salida is -3) (1) If (Error is -4) then (Salida is -4) (1) If (Error is -5) then (Salida is -5) (1) If (Error is 1) then (Salida is 1) (1) If (Error is 2) then (Salida is 2) (1) If (Error is 3) then (Salida is 3) (1) If (Error is 4) then (Salida is 4) (1) If (Error is 5) then (Salida is 5) (1)

82
Gráfico 32. Ventana para visualizar las reglas.
Fuente: Ospino A, 2012.
Con la ayuda del visualizador de reglas se logra evaluar el
desempeño del sistema de inferencia difuso ante diferentes variaciones
en las variables de entrada y así se puede corroborar el buen desempeño
del controlador como se muestra en el Gráfico 32.
El grafico 33 muestra la superficie del sistema de inferencia difuso.
Grafico 33. Superficie del sistema de control.
Fuente: Ospino A, 2012.
83
Este gráfico permite visualizar las acciones de control que genera el
sistema difuso para los posibles valores de las entradas. Los posibles
valores de las entradas están definidos por el rango que se definieron
cuando se diseñó el controlador difuso.
Con este gráfico se puede verificar si el controlador está funcionando
como se ha diseñado, pues tomando una coordenada de la entradas, se
puede ver cuál es la acción de control resultante y luego verificar si esta
tiene sentido con lo que se espera del controlador.
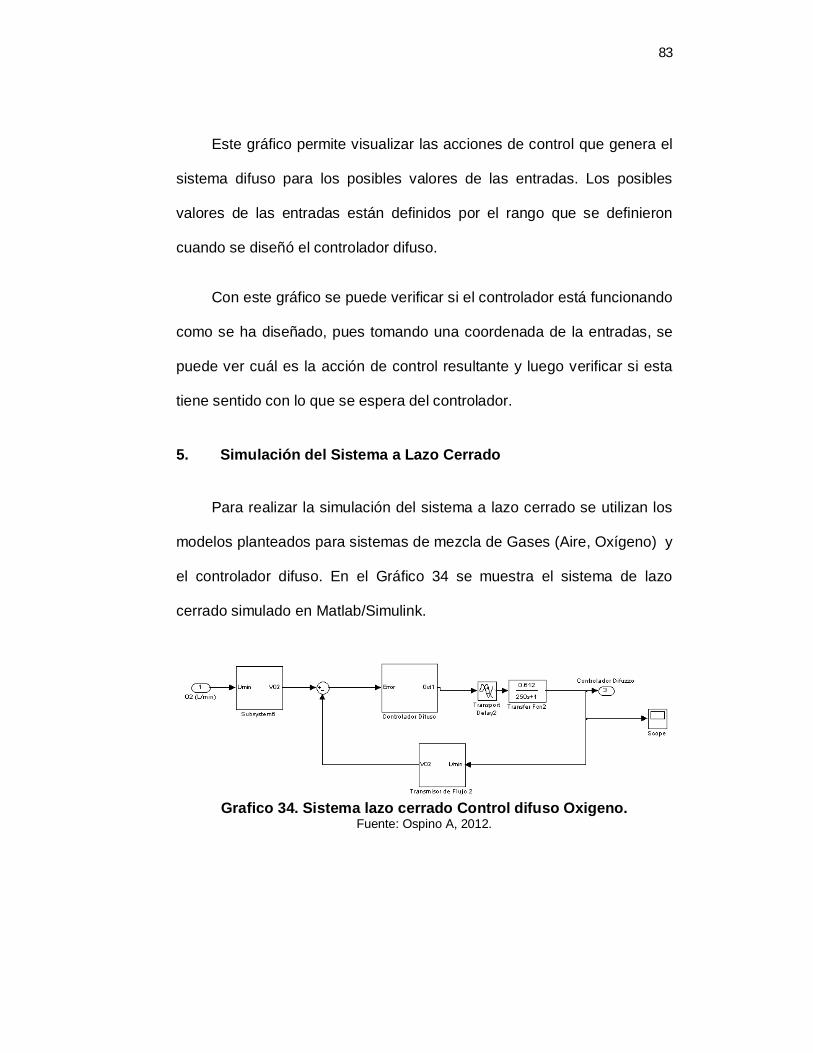
5. Simulación del Sistema a Lazo Cerrado
Para realizar la simulación del sistema a lazo cerrado se utilizan los
modelos planteados para sistemas de mezcla de Gases (Aire, Oxígeno) y
el controlador difuso. En el Gráfico 34 se muestra el sistema de lazo
cerrado simulado en Matlab/Simulink.
Grafico 34. Sistema lazo cerrado Control difuso Oxigeno.
Fuente: Ospino A, 2012.
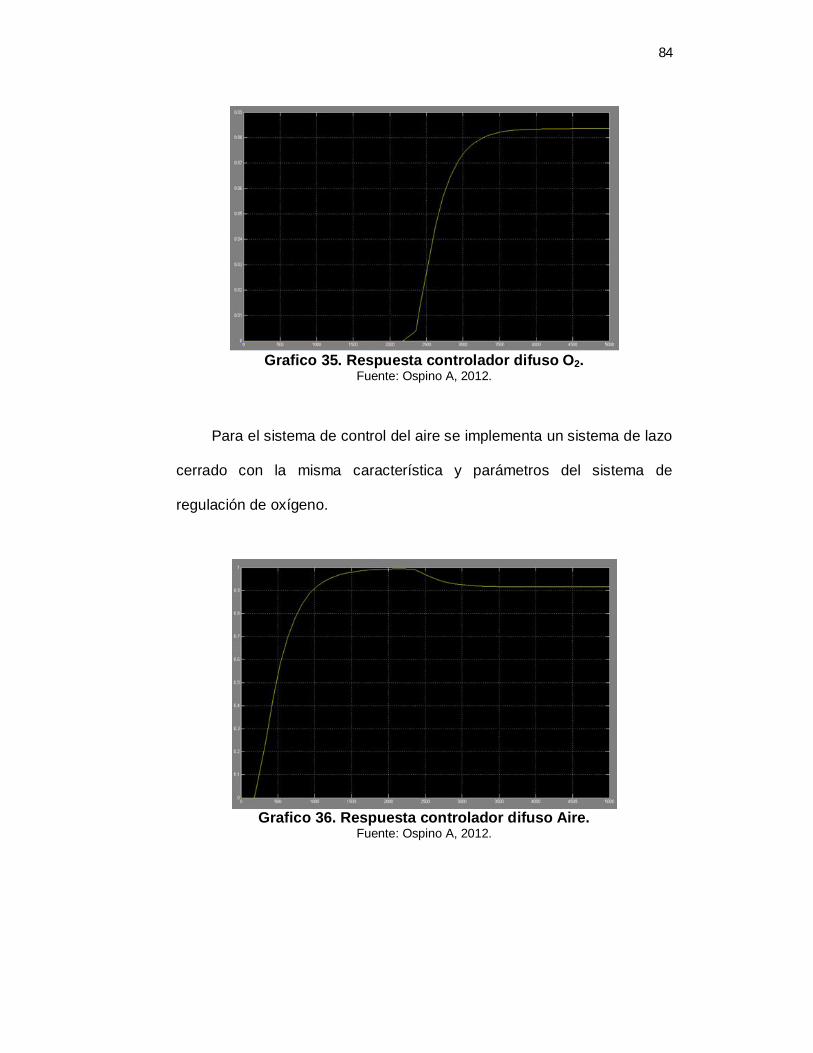
84
Grafico 35. Respuesta controlador difuso O2.
Fuente: Ospino A, 2012.
Para el sistema de control del aire se implementa un sistema de lazo
cerrado con la misma característica y parámetros del sistema de
regulación de oxígeno.
Grafico 36. Respuesta controlador difuso Aire.
Fuente: Ospino A, 2012.
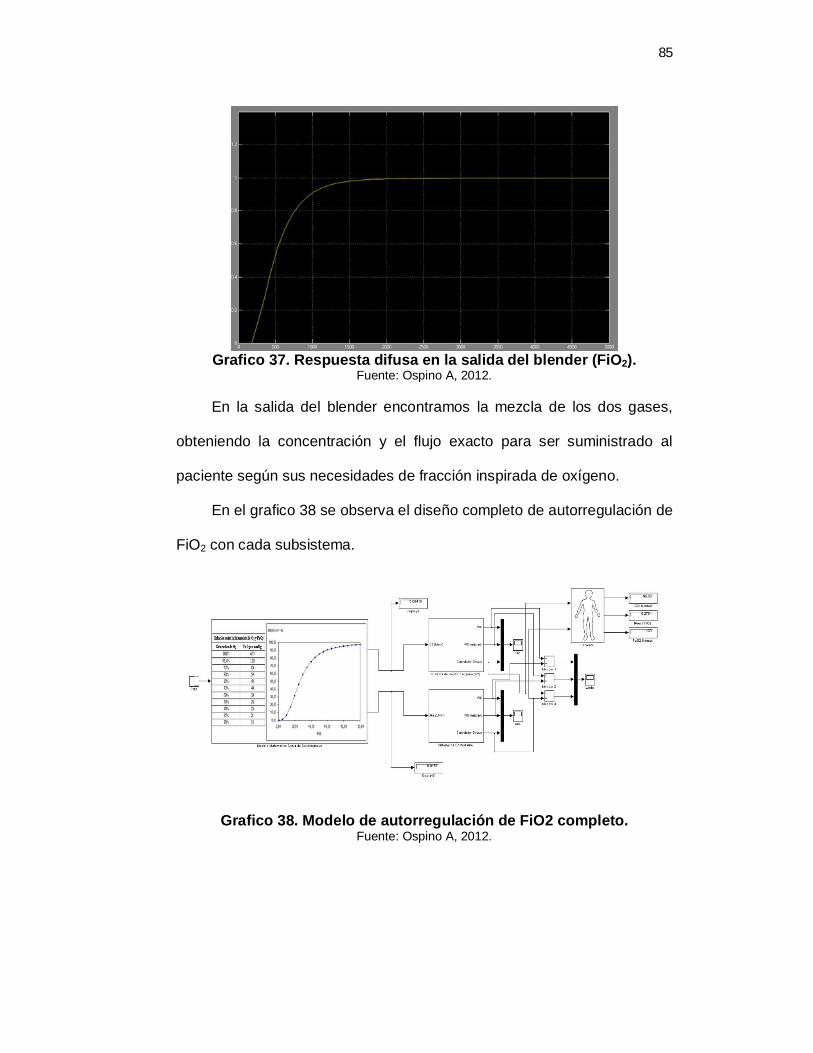
85
Grafico 37. Respuesta difusa en la salida del blender (FiO2).
Fuente: Ospino A, 2012.
En la salida del blender encontramos la mezcla de los dos gases,
obteniendo la concentración y el flujo exacto para ser suministrado al
paciente según sus necesidades de fracción inspirada de oxígeno.
En el grafico 38 se observa el diseño completo de autorregulación de
FiO2 con cada subsistema.
Grafico 38. Modelo de autorregulación de FiO2 completo. Fuente: Ospino A, 2012.

86
6. Simulación para diferente valores de Saturación de Oxigeno (SO2)
Para corroborar el desempeño del controlador difuso en el sistema
de lazo cerrado, se realizó una primera prueba para diferentes valores de
saturación de O2 (90%,94%,97%,98.4%). En el Grafico 41 se muestra una
comparación de las respuesta en cada controlador (Aire y Oxigeno) en él
se puede observar que el controlador difuso tiene un comportamiento más
estable que el PID, aunque al escalonar los valores del PID se obtiene
una respuesta muy parecida al controlador difuso con la diferencia que los
niveles de estabilización y respuesta del controlador difuso son
alcanzados más rápido que los sistemas de control PID. A continuación
se describe un paciente en estado crítico con problemas respiratorios.
Saturación de Oxigeno, SO2= 94%
RESULTADO DE LA PRESIÓN ARTERIAL DE OXIGENO (PaO2)
Presión Arterial de Oxigeno = 74.73 mmHg
FiO2 = 0.2765
Entrega de flujo de Válvulas (L/min) para alcanzar un nivel estable de SO2
98.4% = 0.9169 (Aire) 0.0831 (O2)
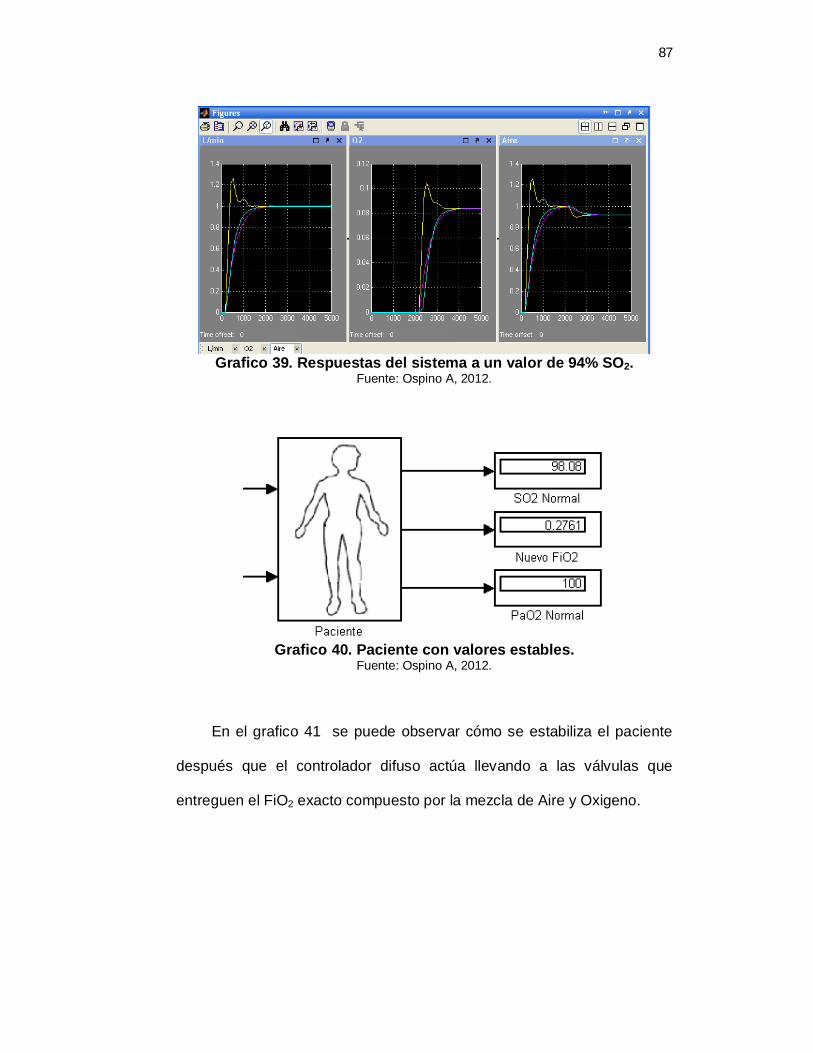
87
Grafico 39. Respuestas del sistema a un valor de 94% SO2.
Fuente: Ospino A, 2012.
Grafico 40. Paciente con valores estables.
Fuente: Ospino A, 2012.
En el grafico 41 se puede observar cómo se estabiliza el paciente
después que el controlador difuso actúa llevando a las válvulas que
entreguen el FiO2 exacto compuesto por la mezcla de Aire y Oxigeno.






![[Lanove-CCF] Sword Art Online Vol03 Cap04 Notas de Autor.pdf](https://static.fdocumento.com/doc/165x107/577cd6ee1a28ab9e789d9859/lanove-ccf-sword-art-online-vol03-cap04-notas-de-autorpdf.jpg)