Control Pid Discreto
9
CONTROL PID DIGITAL: Por: Danny Ochoa Correa Docente de la Facultad de RESÚMEN Este artículo ofrece una controlador PID digital, asignaturas Teoría de C general, de tal manera mic rop roc esa do y len guaj y ejecutarlo de acuerdo a se presenta una altern computador personal y un INTRODUCCIÓN Hoy en día, los sistemas avance de la tecnología y cada aspecto de las activi de control. En los últimos años el uso aumento, dado que p erm desempeño a bajo costo y Las razones por las que a forma digital en lugar de bajo costo y las ventajas tiempo continuo. Los sis temas en tiemp dife renciales, d el mismo m mediante ecuaciones en señales en tiempo continu La mayoría de ingenieros teoría y práctica del co conseguir un óptimo c produ ctivi dad al simp lifi ca actividades. ESTRUCTURA DEL CON Un sist ema de control dig único propósito de reempl proce so físico co ntinúa sie Algoritmo, diseño e implementación. Ingeniería guía procedimental de diseño e implem iri gi do a est udian tes que est én o hay ntrol y Microprocesadores. Se plantea que, pueda ser implementado en cu de pr og rama ci ón , dand o l a l ib er tad al alu sus conveniencias técnicas y económicas. tiva de i mplementación mediante la ut microcontrolador. e control cumplen un rol muy i mpor tante e por en de de la civilización moderna , ya qu ades de nuestra vida diaria está afectado p de controladores digitales en sistemas de iten alcanzar una máxima pro duc tividad c con el mínimo consumo de energía. ctualmente se tiende a contr ola r los si ste m naló gi ca, es la dis po nibilidad de compu ta d e traba jar con s eñal es dig itale s en luga r d continuo se pueden de sc ribir media odo, los siste mas en tiemp o d iscre to se pu if erencias, después de la apropiada discr . debe n tener un buen conocimiento de lo trol automático, dado que proporciona l mportamien to de los sistemas di námi c r el traba jo de mu ch as op eraciones manu ROL DIGITAL ital (o discre to) se i ntroduce en un lazo d zar al controlador, por tanto, en la mayoría ndo continuo (analógico). entación de un an cursado las na metodología alquier sistema no de mejorarlo En la parte final ilización de un n el desarrollo y e prácticamente or algún sistema ontrol ha ido en n un excelente s dinámicos en ras digitales de las señales en nte ecuaciones den representar etización de las avances en la s medios para os, mejorar la ales entre otras e control con el de los casos, el
-
Upload
danny-ochoa -
Category
Documents
-
view
2.239 -
download
0
Transcript of Control Pid Discreto

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 1/8
CONTROL PID DIGITAL:
Por: Danny Ochoa CorreaDocente de la Facultad de
RESÚMEN
Este artículo ofrece una
controlador PID digital,
asignaturas Teoría de C
general, de tal manera
microprocesado y lenguaj
y ejecutarlo de acuerdo a
se presenta una altern
computador personal y un
INTRODUCCIÓN
Hoy en día, los sistemasavance de la tecnología ycada aspecto de las activide control.En los últimos años el usoaumento, dado que permi
desempeño a bajo costo yLas razones por las que aforma digital en lugar de abajo costo y las ventajastiempo continuo.Los sistemas en tiempdiferenciales, del mismo mmediante ecuaciones enseñales en tiempo continuLa mayoría de ingenieros
teoría y práctica del conconseguir un óptimo cproductividad al simplificaactividades.
ESTRUCTURA DEL CON
Un sistema de control digúnico propósito de reemplproceso físico continúa sie
Algoritmo, diseño e implementación.
Ingeniería
guía procedimental de diseño e implem
irigido a estudiantes que estén o hay
ntrol y Microprocesadores. Se plantea u
que, pueda ser implementado en cu
de programación, dando la libertad al alu
sus conveniencias técnicas y económicas.
tiva de implementación mediante la ut
microcontrolador.
e control cumplen un rol muy importante epor ende de la civilización moderna, ya quades de nuestra vida diaria está afectado p
de controladores digitales en sistemas deiten alcanzar una máxima productividad c
con el mínimo consumo de energía.ctualmente se tiende a controlar los sistemnalógica, es la disponibilidad de computade trabajar con señales digitales en lugar d
continuo se pueden describir mediaodo, los sistemas en tiempo discreto se puiferencias, después de la apropiada discr.deben tener un buen conocimiento de lo
trol automático, dado que proporciona lmportamiento de los sistemas dinámic
r el trabajo de muchas operaciones manu
ROL DIGITAL
ital (o discreto) se introduce en un lazo dzar al controlador, por tanto, en la mayoría
ndo continuo (analógico).
entación de un
an cursado las
na metodología
alquier sistema
no de mejorarlo
En la parte final
ilización de un
n el desarrollo ye prácticamenteor algún sistema
ontrol ha ido enn un excelente
s dinámicos enras digitales delas señales en
nte ecuacionesden representaretización de las
avances en la
s medios paraos, mejorar laales entre otras
e control con elde los casos, el

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 2/8
La señal de salida del pro(llamado período de muedigital (ADC). Esta informnuevamente en analógica
tanto, internamente el conttrabajando y ve todas lasrazón resulta mucho másecuaciones diferenciales.
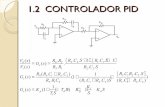
La estructura típica de ucontinuación:
COMPUTADOR
ReferenciaAlgoritmo de control
CONVERANALÓGIC
( )k y t
( )k u t
Control autom
Figura 1. Estru
Características del contr
Como características bási
• El algoritmo puedeanalógicos si prese
• La facilidad de ajuhace muy flexiblmodificados simplanalógicos implica
cambio del controla• Los sistemas digital• Si el controlador d
utilizado simultánealarmas, administrcon el operador del
• El costo es el princlugar de un analófunción del número
eso de control se muestrea cada cierto inttreo) y es discretizada mediante un conveación es procesada por el controlador digi
mediante un convertidor digital-analógic
rolador digital se independiza del tipo de semagnitudes como una serie de valores discómodo trabajar con ecuaciones en difere
sistema de control digital en lazo cerrad
CONVERTIDORDIGITAL-ANALÓGICO AMPLIFICADORDE POTENCIA C
SENSOR DEREALIMENTACIÓN
TIDOR-DIGITAL
( )u t
ático digital
tura de un sistema de control digital en lazo cerr
l digital
as del control digital se pueden mencionar l
ser implementado sin límite de complejidantan esta dificultad.ste y cambio que presentan los controlados. Esto implica que, los controladoremente reprogramando el algoritmo, mientun cambio de componentes o, en el peor
dor completo.les presentan menor sensibilidad al ruido eligital es implementado en un computador,mente para otros fines, tales como: adquición, etc. Al mismo tiempo presenta una exequipo.ipal argumento para utilizar un sistema deico. El costo de un sistema analógico sde lazos, no así con el digital.
rvalo de tiemportidor analógico-ital y convertida
(DAC). Por lo
al con que estácretos. Por estacia en lugar de
o se muestra a
PLANTANTROLADA( ) y t
ado
s siguientes:
d. Los sistemas
res digitales losdigitales son
ras que, en lose los casos, un
ctromagnético.este puede ser
sición de datos,elente interface
ontrol digital enincrementa en

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 3/8
DISEÑO CONTROL PID P
El controlador PID (Proprealimentado ampliamente
PID corrige el error entreobtener (referencia), calcajustada al proceso que scabo por tres componente
La ecuación integro-diferecontinuo es:
( )u t
donde: p
i
i
K K
T = y d K =
y derivativa, respectivametiempo.
Para implementar el bloqurepresentación continua aUno de ellos es utilizar loperaciones involucradas.
trapezoidal , y para la deriv
donde:t ∆ →Intervalo de muestre
Por tanto la ecuación (1) s
( ) (k pu t K e=
La ecuación (4), es adecforma de controlador PIDNótese que la nueva acci
t ∆ .
ARALELO DIGITAL
orcional-Integral-Derivativo) es un mecaniutilizado en sistemas de control industriales
un valor medido (realimentación) y el valolándolo y luego sacando una acción codesea controlar. La acción del controlador: el proporcional, el integral, y el derivativo.
cial que representa un controlador PID pa
0
( )( ) ( )
t
p i d
de t K e t K e d K
dt τ τ + +∫
p d T , siendo Kp, K i y Kd las constantes prop
nte, y e(t) el error en estado estacionario
e PID digital es necesario convertir la ecuuna discreta. Existen varios métodos paras definiciones estudiadas en Cálculo parPor tanto, para la integral se utilizará l
da la aproximación por diferencias finitas :
01
( ) ( )nt
k
k
e d e t t τ τ
=
≈ ∆∑∫
1( ) ( )( ) k k e t e t de t
dt t
−−
≈∆
(segundos)
transforma en:
1
1
( ) ( )) ( )
nk k
k i k d
k
e t e t t K e t t K
t
−
=
−+ ∆ +
∆∑
ada para implementar un sistema de cones a menudo conocida como controlador
n de control es implementada cada interv
smo de control. Un controlador
r que se quiererrectiva que esPID es llevada a
ralelo en tiempo
(1)
rcional, integral
en función del
ción (1) de unallevarlo a cabo.
a aproximar lasla aproximación
(2)
(3)
(4)
trol digital. EstaPID posicional .lo de muestreo

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 4/8
Efecto wind-up en la inte En aplicaciones prácticas,están limitadas físicament
el término integral sigue suup (o saturación integralsobresalto (overshoot) ensucede es el siguiente. Secambio grande en la refecontrolador tratará de reducrecerá por la suma de lagrande será aplicada altérmino integral sigue sierequerida. En consecuenci
salir de esta condición.El problema de wind-up epor tanto se han desarrollcomunes son las siguiente
• Detener la suma illama integración ccero si la salida del
• Fijar los límites del• Reducir la entrad
controlador se satu
ALGORITMO CONTROL
En primera instancia, asig
VARIABLE
( )k ref t → referencia
( )k
rea t → realimentacion
( )k
e t → error_actual 1
( )k e t −→ error_previo
gración discreta
todas las acciones involucradas en un pr. Como consecuencia, la señal de error no
mándose continuamente (Ec. 2). Este efect), y como resultado, pueden ocurrir largla respuesta de la planta. Un ejemplo sedesea controlar la velocidad de un motor
encia (set-point), por tanto el error tambiécir el error entre la referencia y la salida. Elseñales de error en cada muestra y una aotor. Si se cambia el punto de referenciando grande y no responde de inmediatoa, el sistema tendrá una respuesta deficient
la integración afecta a los controladores Pado muchas técnicas para eliminarlo. Algus:
tegral cuando se produce la saturación.ndicional. La idea es establecer la entradacontrolador está saturada.término integral entre un mínimo y un máxia al integrador por alguna constante s
ra.
DOR PID DIGITAL
amos nombres a las variables a utilizar:
DESCRIPCIÓNCualquiera que sea la variable físic(velocidad en RPM, temperatura en °C,en cm), la señal de referencia, gener
naturaleza eléctrica expresada en voltiosvalor al cual debe converger el controladoEs la señal eléctrica que representa el esmagnitud física. Se la obtiene en lossensor, o elemento de medición, que eque convierte la variable de la salida enpor el controlador, como un voltaje, quepara comparar la salida con la señalreferencia.Es la diferencia existente entre las señale
y realimentación en un instante de tiempoEs la diferencia existente entre las señale
ceso de controlvuelve a cero y
o se llama wind-os periodos dencillo de lo que
se produce unn es grande. Eltérmino integralcción de controla otro valor, ela la referenciaal momento de
ID posicionales,nas de las más
sto también sedel integrador a
o.i la salida del
a a controlarivel de líquidolmente, es de
y representa el.tado de algunaterminales delun dispositivo
otra manejablepueda usarse
de entrada de
s de referencia
tk.s de referencia

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 5/8
t ∆ → delta_t
( )k u t → salida
Algoritmo simple:
• Es importante mencarga con el datocolocada en los ttransfieran a los co
Algoritmo anti-windup in
En sistemas de control di
poseen un número finitoanalógica de 0 a 5V. Por tseñales digitales que manEsto se logra fácilmente,integral como en la salida
error_previo=0
integral=0
inicio:
error_actual=
integral=inte
derivada=(err
salida=(Kp)*e
error_previo
esperar delta
ir a inicio
y realimentación en un instante de tiempcon sistemas digitales, es posible ir almdatos en memoria.El intervalo de muestreo es la acción
segundos) en la cual se realizan las acciola adquisición de datos. Su dimensionade la naturaleza de la planta a controlar.Señal eléctrica que representa las accionel controlador para alcanzar el punto de rnaturaleza digital y, mediante un DAconvertida en analógica para alimentcontrolada.
cionar que, en cada iteración la variable r
e lectura del ADC (sensor), y la variablerminales del DAC para que las accioneponentes analógicos (Fig. 2).
egral y en la salida
igital prácticos, se utilizan convertidores A
de bits (ej. 8 bits), con un rango de varianto, es importante mejorar el algoritmo ante ja, no excedan la escala de los convertidoral colocar una protección anti-windup , tael controlador digital, de la siguiente maner
eferencia-realimentacion
ral+(error_actual)*delta_t
r_actual-error_previo)/delta_t
ror_actual+(Ki)*integral+(Kd)*de
error_actual
t
o tk-1. Al contarcenando estos
periódica (en
es de control yiento depende
es tomadas porferencia. Es deC, puede serar una planta
alimentación sesalida , debe ser
de control se
DC y DAC que
ción de tensiónrior para que lass (0d-255d).nto en la parte:
rivada

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 6/8
Con esto se asegura quey el valor de salida no deejemplo.
IMPLEMENTACIÓN DE C
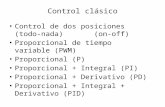
A continuación se presencuya parte digital consiste
MAX232
Reloj20Mhz
COMPUTADORReferencia
Kp, Ki, Kd Algoritmo de control
Adquisición de datos
Figura 2. Configura
Computador (PC): Sistalgoritmo de control digitaltales como: referencia, cderivativa Kd y tiempo drepresenta la señal elécorrectivas. Además prese
MAX-232: Etapa necesari(PC), dado que amplifica lpor el estándar RS-232 paeléctrico y electrónico a utilen su hoja de especificacio
…
integral=integral+
si (integral>
integral
si (integral<
integral
…
salida=(Kp)*error_
si (salida>25
salida=2
si (salida<0)
salida=0
…
l valor de la variable integral no aumente eborde la escala de conversión del DAC de
ONTROL PID DIGITAL
ta una alternativa de implementación delen un computador personal y un microcontr
PIC16F876A
DACAcondicionador
de señal
Plantcontrol
Sensor derealimentación
ADC
ión para la implementación del sistema de contr
ma micro-procesado en el cual está iPID. En éste se especifican los parámetronstante proporcional Kp, constante integr
e muestreo. Recibe del ADC una señaltrica del sensor de realimentación par
nta una interfaz gráfica para el usuario.
para comunicar de forma serial el PIC cos niveles de tensión de la salida del PIC a
ra que sea interpretado correctamente porlizar corresponde al sugerido por el fabricannes.
(error_actual)*delta_t
55) entonces:
=255
255) entonces:
=-255
ctual+(Ki)*integral+(Kd)*derivad
) entonces:
55
entonces:
xageradamente,8 bits para este
ontrolador PID,lador.
Amplificador depotencia
ada ol digital
plementado eldel controladoral Ki, constantecodificada que
a las acciones
n el computadorlos establecidosl PC. El circuitoe del dispositivo
a

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 7/8
Microcontrolador PIC 16funciones principales eninternamente la conversióRS-232 entre el PIC y el c
del controlador PID por udigital-analógico externo.
Convertidor analógico diun conjunto de ADCs denesta estructura para ahorr
Convertidor digital analóresistencias en escalera Rparalelamente a unos de l
Acondicionador de señalmaneja niveles de energía
Amplificador de potencibloque controlador analóg(planta controlada), por tan
Planta controlada: Lamontados físicamente losproceso físico a controlar.
Actuador: El actuadormodificar las condicioneslíquido, etc.).
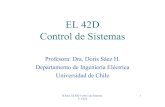
La figura 3 muestra el panVisual Basic.
F876A: El PIC (Peripheral Interface Contro
la estructura de control digital pron analógica-digital, ser la interface de commputador (PC), y por último, enviar el valor
no de sus puertos de forma paralela haci
gital (ADC): La mayoría de Microcontroladotro de su encapsulado, por tanto, puedenr espacio físico e inversión en componentes
gico (DAC): Puede ser implementado medi2R o el circuito integrado DAC-0808. Debes puertos de salida del PIC.
: Etapa necesaria si la entrada del Amplificdiferentes a la salida del DAC.
a: El nivel de voltaje-corriente de la señico muchas veces es inferior a la que requto es necesario amplificarla.
planta controlada constituye el medio eelementos: actuador y el sensor de reali
ermite, mediante la aplicación de unade una variable física (velocidad, tempe
el de un controlador PID digital implement
ller) cumple tresuesta: realizarunicación serialdigital de salida
a el convertidor
res PIC incluyener utilizados enelectrónicos.
ante una red deestar conectado
dor de Potencia
l de salida deliere el actuador
n donde estánentación. Es el
señal eléctrica,ratura, nivel de
do en Microsoft

5/13/2018 Control Pid Discreto - slidepdf.com
http://slidepdf.com/reader/full/control-pid-discreto-55a755211642c 8/8
Figura 3. Interfa
BIBLIOGRAFÍA
• CREUS SOLÉ, AEDITOR S.A. Sext
• DOGAN, Ibrahim.
Sons Ltd, Sin edici• KUO, Benjamín.edición, México, 19
• OCHOA CORREAequipos de labora Teoría de Control Ingeniero Eléctrico,
• OGATA, Katsuhikoedición, México, 20
• SHAW, John A. T how to use it . Proc
e del controlador digital mediante Visual Basic
tonio. Instrumentación Industrial , ALFAOedición. España, 1998.icrocontroller Based Applied Digital Contr
n, Inglaterra. 2006.istemas de control automático. Prentic96., Danny. Modelación, Simulación e Imp torio para la realización de prácticas de
Instrumentación . Tesis previa a la obtenUniversidad de Cuenca, Ecuador, 2011.. Ingeniería de Control Moderno. Ed. McG05.e PID Control Algorithm: How it works, ho ss Control Solutions, Segunda Edición. 200
010.
MEGA GRUPO
l . John Wiley &
Hall, Séptima
lementación de las asignaturas ión del título de
raw Hill, Cuarta
to tune it, and .