Elmentos de maquinas cap i,ii y iii
29
Realizado por: Andrés Gonzalo CI: 20.904.077 Republica Bolivariana de Venezuela I.U.P Santiago Mariño Ing. Industrial
-
Upload
andres-gonzalo -
Category
Education
-
view
28 -
download
3
Transcript of Elmentos de maquinas cap i,ii y iii
Realizado por:Andrés GonzaloCI: 20.904.077
Republica Bolivariana de Venezuela
I.U.P Santiago Mariño
Ing. Industrial
Esfuerzo se define como una interacción entre dos cuerpos; es una cantidad física vectorial que se describe mediante los conceptos intuitivos de “empujar” y “jalar”. Desde el punto de vista de la Dinámica, cuando se aplica una fuerza a un cuerpo, el efecto que tiene dicha fuerza es darle al cuerpo una aceleración y, por tanto, cambiar el estado de reposo o de movimiento uniforme que tenía el cuerpo antes de la aplicación de la fuerza. Esto viene descrito por la Segunda Ley de Newton.
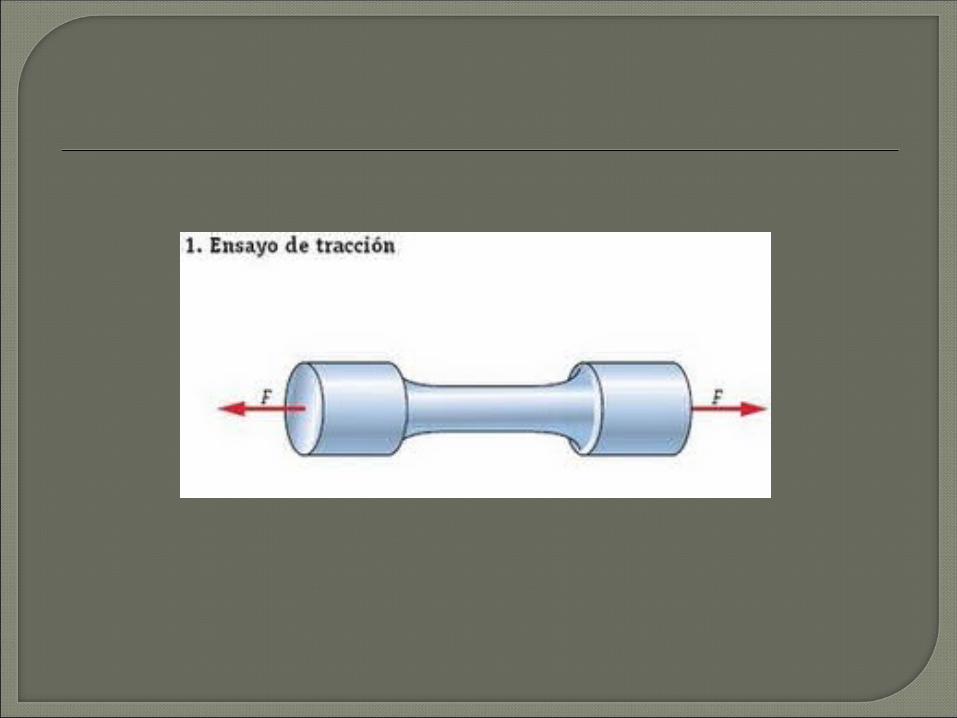
Esfuerzo a que está sometido un cuerpo por la aplicación de dos fuerzas que actúan en sentido opuesto, y tienden a estirarlo, aumentando su longitud y disminuyendo su sección. Compresión: esfuerzo a que está sometido un cuerpo por la aplicación dedos fuerzas que actúan en sentido opuesto, y tienden a comprimirlo, disminuyendo su longitud y aumentando su sección.
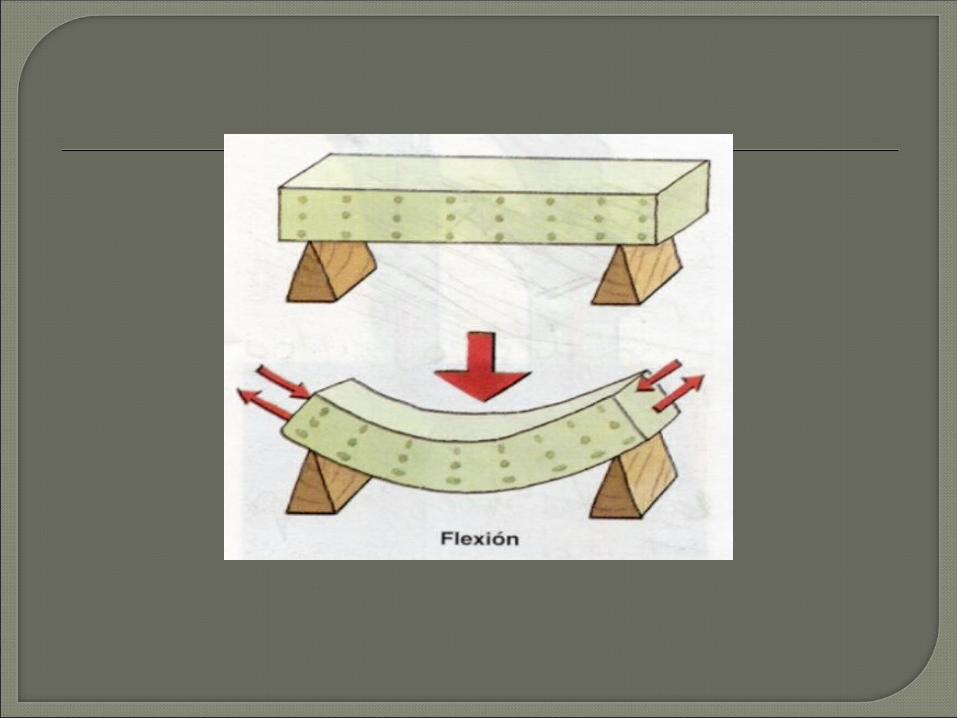
Esfuerzo que tiende a doblar el objeto. Las fuerzas que actúan son paralelas a las superficies que sostienen el objeto. Siempre que existe flexión también hay esfuerzo de tracción y de compresión
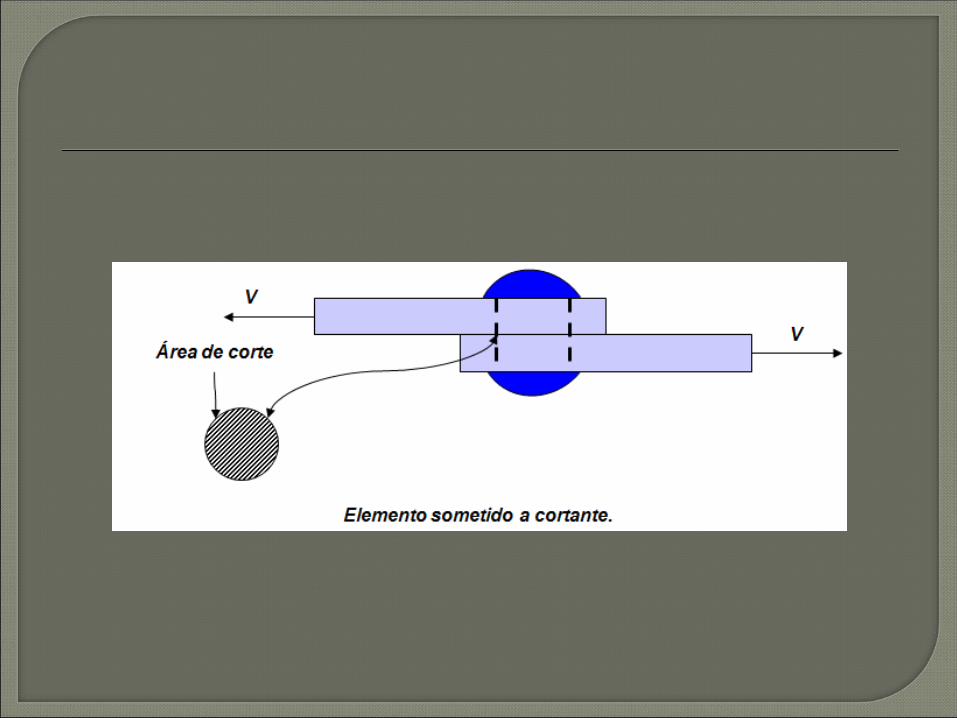
Esfuerzo que tiende a cortar el objeto por la aplicación de dos fuerzas en sentidos contrarios y no alineadas. Se encuentra en uniones como: tornillos, remaches y soldaduras
Deformaciones del Material pertenecen al grupo de las denominadas lesiones mecánicas. Son consecuencia de procesos mecánicos, a partir de fuerzas externas o internas que afectan a las características mecánicas de los elementos constructivos. En el caso de las deformaciones, son una primera reacción del elemento a una fuerza externa, al tratar de adaptarse a ella.
es una propiedad de un material por virtud de la cual las deformaciones causadas por el esfuerzo desaparecen al removérsele. Algunas sustancias, tales como los gases poseen únicamente elasticidad volumétrica, pero los sólidos pueden poseer, además, elasticidad de forma. Un cuerpo perfectamente elástico se concibe como uno que recobra completamente su forma y sus dimensiones originales al retirarse el esfuerzo
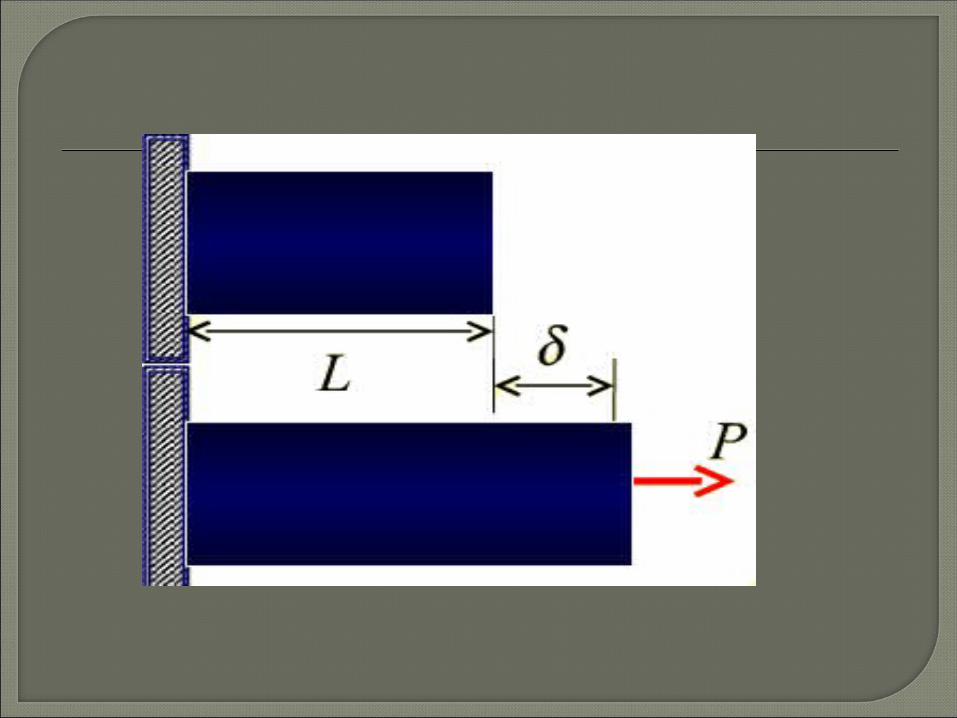
Hooke estableció la ley fundamental que relaciona la fuerza aplicada y la deformación producida. Para una deformación unidimensional, la Ley de Hooke se puede expresar matemáticamente así:
[ = -k ]
K es la constante de proporcionalidad o de elasticidad.
es la deformación, esto es, lo que se ha comprimido o estirado a partir del estado que no tiene deformación. Se conoce también como el alargamiento de su posición de equilibrio.
es la fuerza resistente del sólido. El signo ( - ) en la ecuación se debe a la fuerza
restauradora que tiene sentido contrario al desplazamiento. La fuerza se opone o se resiste a la deformación.
Las unidades son: Newton/metro (New/m) – Libras/pies (Lb/p).
se da cuando un sólido se deforma adquiriendo mayor energía potencial elástica y, por tanto, aumentando su energía interna sin que se produzcan transformaciones termodinámicas irreversibles. La característica más importante del comportamiento elástico es que es reversible: si se suprimen las fuerzas que provocan la deformación el sólido vuelve al estado inicial de antes de aplicación de las cargas.
aquí existe irreversibilidad; aunque se retiren las fuerzas bajo las cuales se produjeron deformaciones elásticas, el sólido no vuelve exactamente al estado termodinámico y de deformación que tenía antes de la aplicación de las mismas.
que se produce cuando la velocidad de deformación entra en la ecuación constitutiva, típicamente para deformar con mayor velocidad de deformación es necesario aplicar más tensión que para obtener la misma deformación con menor velocidad de deformación pero aplicada más tiempo.
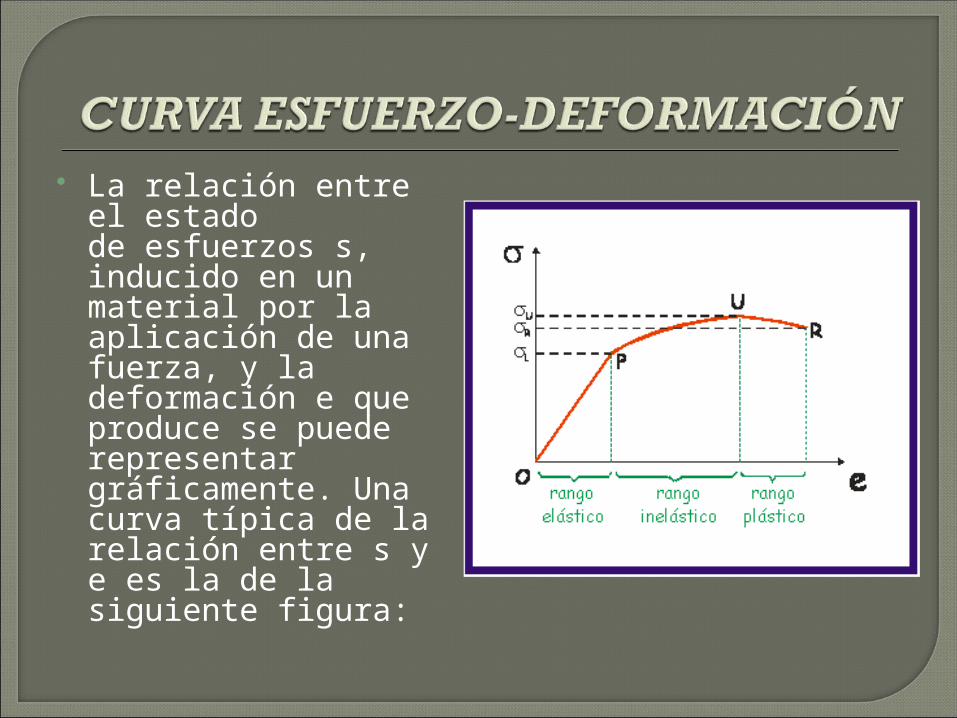
La relación entre el estado de esfuerzos s, inducido en un material por la aplicación de una fuerza, y la deformación e que produce se puede representar gráficamente. Una curva típica de la relación entre s y e es la de la siguiente figura:
Entre el origen de coordenadas O y el punto P el material es elástico, y la relación entre el esfuerzo y la deformación es lineal y dada por la Ley de Hooke:
Donde M es el módulo de elasticidad y viene dado por la pendiente de la recta OP:
M = tan a
Esta zona lineal se denomina “rango elástico”. La ordenada sL del punto P se denomina “límite elástico” y corresponde al esfuerzo más alto que se puede aplicar sobre el material sin que éste deje de ser elástico, esto es, sin que la deformación sea permanente o residual cuando el esfuerzo deje de actuar.
El tramo PU de la gráfica ya no es una recta, sino curva. A la ordenada sU del punto U se le denomina “esfuerzo último” y es el esfuerzo máximo que se le puede aplicar al material. Esta zona entre P y U se denomina “rango inelástico” y nos indica que los esfuerzos que actúan sobre el material producen en éste deformaciones residuales o permanentes.
La zona de la gráfica entre los puntos P y R se
denomina “rango plástico”. En esta zona ocurre una deformación plástica del material, de manera que, aunque la intensidad del esfuerzo disminuya, la deformación del material aumenta.
La ordenada sR del punto R se denomina “esfuerzo de ruptura” y es el esfuerzo que produce la ruptura del material.
Un momento de torsión es aquel que tiende a hacer girar un miembro respecto a su eje longitudinal. Su efecto es de interés primordial en el diseño de ejes de transmisión, utilizados ampliamente en vehículos y maquinaria

De forma similar al caso de esfuerzos normales, existe también una relación proporcional entre las deformaciones cortantes que ocurren en el rango elástico y los esfuerzos cortantes relativos a dichas deformaciones.
De forma matemática, podemos expresar dicha relación como sigue:
Donde “ t ” es el esfuerzo cortante, “ y ” es la deformación cortante y “ G” es el módulo de rigidez, que se puede relacionar con el modulo de elasticidad ( “E” ) de la siguiente forma:
Siendo “ V ” el módulo de Poisson.