FUNCIÓN DE TRANSFERENCIA...
10
UNIVERSIDAD POLITÉCNICA DE VICTORIA FUNCIÓN DE TRANSFERENCIA PULSO PRÁCTICA 3.1.1 ESCUELA: Universidad Politécnica de Victoria ASIGNATURA: Control digital MAESTRO: Dr. Yahir Hernández Mier ALUMNO: Ángel Arturo Ramírez Suárez GRUPO: IM 8-1
Transcript of FUNCIÓN DE TRANSFERENCIA...
UNIVERSIDAD POLITÉCNICA DE VICTORIA
FUNCIÓN DE TRANSFERENCIA PULSO
PRÁCTICA 3.1.1
ESCUELA: Universidad Politécnica de Victoria
ASIGNATURA: Control digital
MAESTRO: Dr. Yahir Hernández Mier
ALUMNO: Ángel Arturo Ramírez Suárez
GRUPO: IM 8-1
Objetivo. Comprender las operaciones involucrados en la realización de controladores en tiempo continuo y
tiempo discreto mediante el análisis y la simulación de sistemas.
Instrucciones.
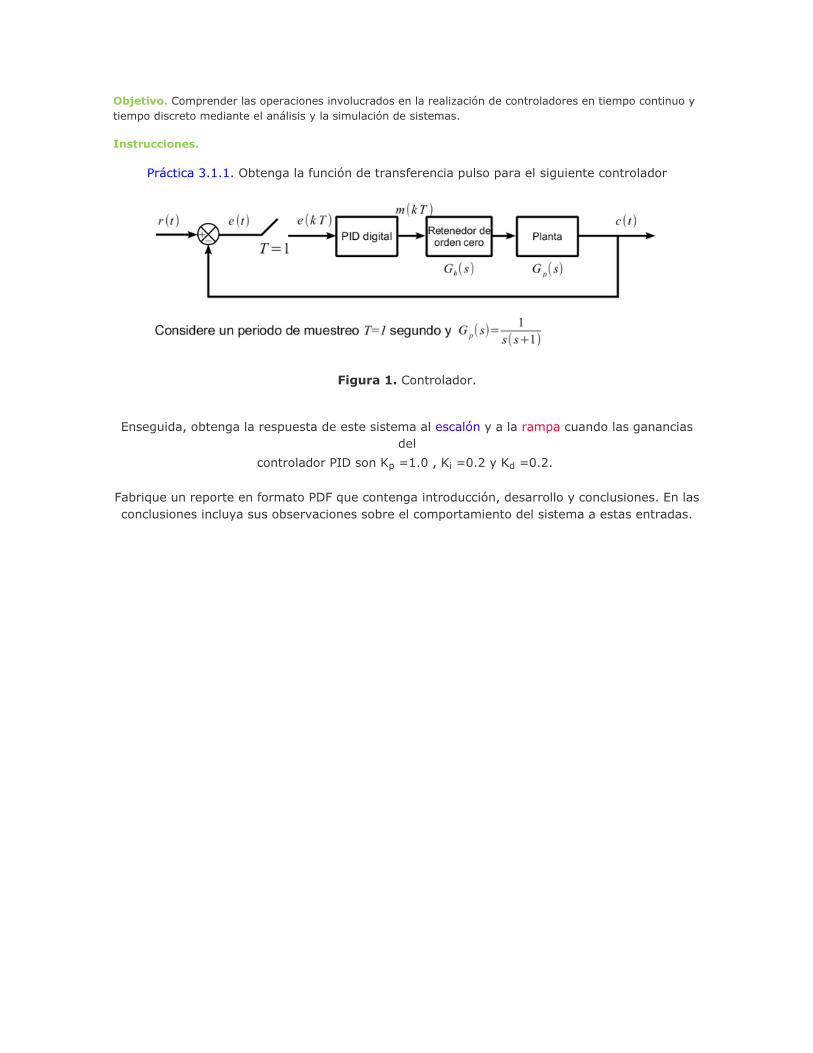
Práctica 3.1.1. Obtenga la función de transferencia pulso para el siguiente controlador
Figura 1. Controlador.
Enseguida, obtenga la respuesta de este sistema al escalón y a la rampa cuando las ganancias
del
controlador PID son Kp =1.0 , Ki =0.2 y Kd =0.2.
Fabrique un reporte en formato PDF que contenga introducción, desarrollo y conclusiones. En las
conclusiones incluya sus observaciones sobre el comportamiento del sistema a estas entradas.
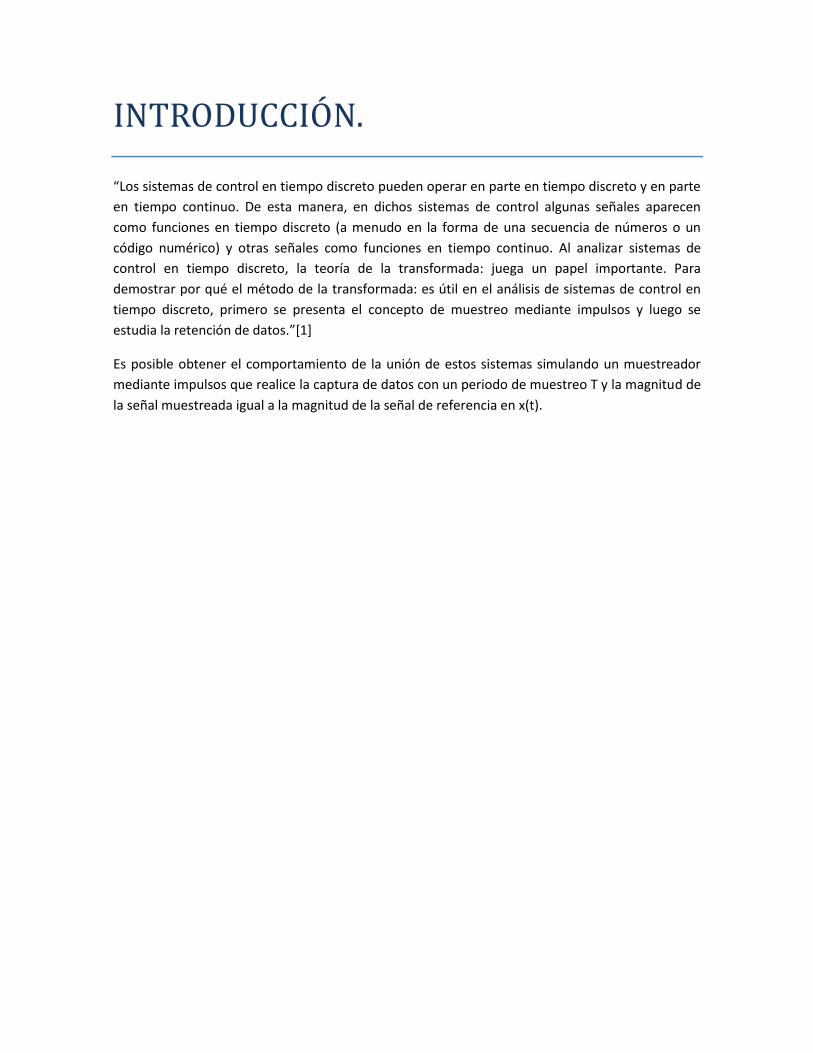
INTRODUCCIÓN.
“Los sistemas de control en tiempo discreto pueden operar en parte en tiempo discreto y en parte
en tiempo continuo. De esta manera, en dichos sistemas de control algunas señales aparecen
como funciones en tiempo discreto (a menudo en la forma de una secuencia de números o un
código numérico) y otras señales como funciones en tiempo continuo. Al analizar sistemas de
control en tiempo discreto, la teoría de la transformada: juega un papel importante. Para
demostrar por qué el método de la transformada: es útil en el análisis de sistemas de control en
tiempo discreto, primero se presenta el concepto de muestreo mediante impulsos y luego se
estudia la retención de datos.”[1]
Es posible obtener el comportamiento de la unión de estos sistemas simulando un muestreador
mediante impulsos que realice la captura de datos con un periodo de muestreo T y la magnitud de
la señal muestreada igual a la magnitud de la señal de referencia en x(t).
DESARROLLO.
HERRAMIENTAS.
Computadora personal.
Scilab (aplicación de procesamiento matemático).
DESARROLLO.
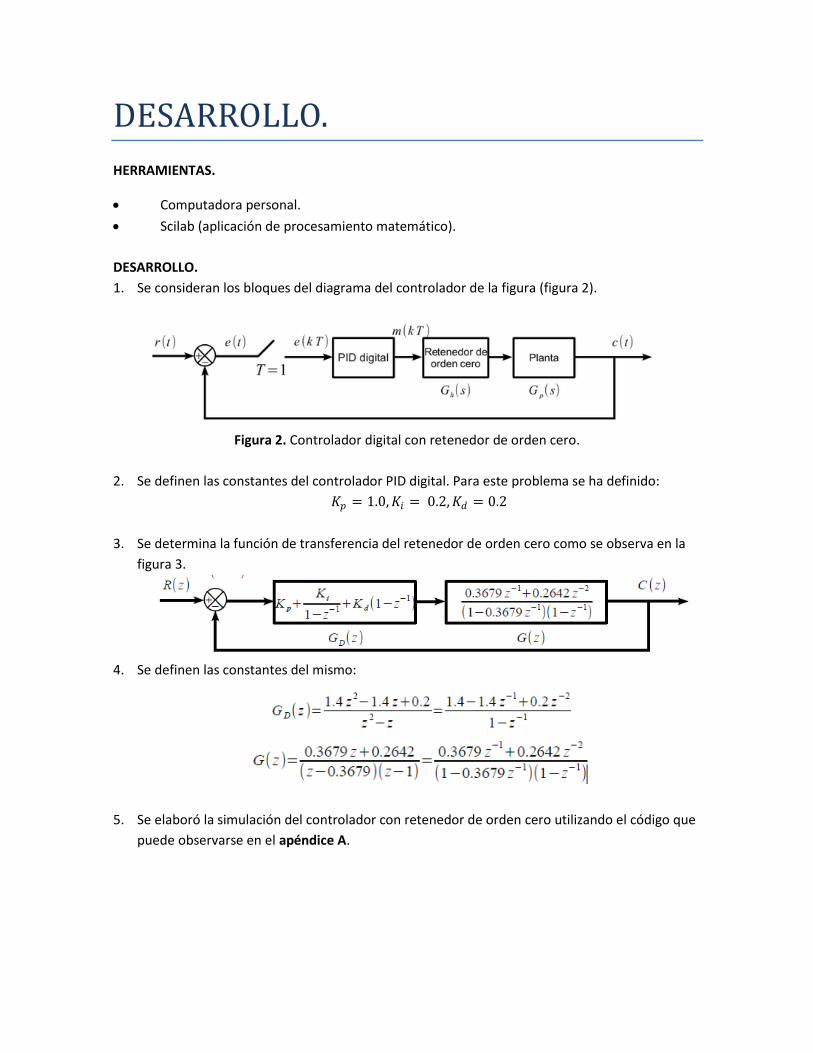
1. Se consideran los bloques del diagrama del controlador de la figura (figura 2).
Figura 2. Controlador digital con retenedor de orden cero.
2. Se definen las constantes del controlador PID digital. Para este problema se ha definido:
𝐾𝑝 = 1.0,𝐾𝑖 = 0.2,𝐾𝑑 = 0.2
3. Se determina la función de transferencia del retenedor de orden cero como se observa en la
figura 3.
4. Se definen las constantes del mismo:
5. Se elaboró la simulación del controlador con retenedor de orden cero utilizando el código que
puede observarse en el apéndice A.

6. Se obtiene la gráfica de la respuesta del sistema al escalón unitario como se muestra en la
figura 4.
Figura 4. Respuesta del sistema al escalón unitario.
7. Posteriormente se modifica el código para observar la respuesta del sistema a una entrada
rampa unitaria. La modificación puede observarse en el apéndice B.
8. Se grafica la respuesta del sistema a la rampa, obteniéndose la gráfica que se muestra en la
figura 5.
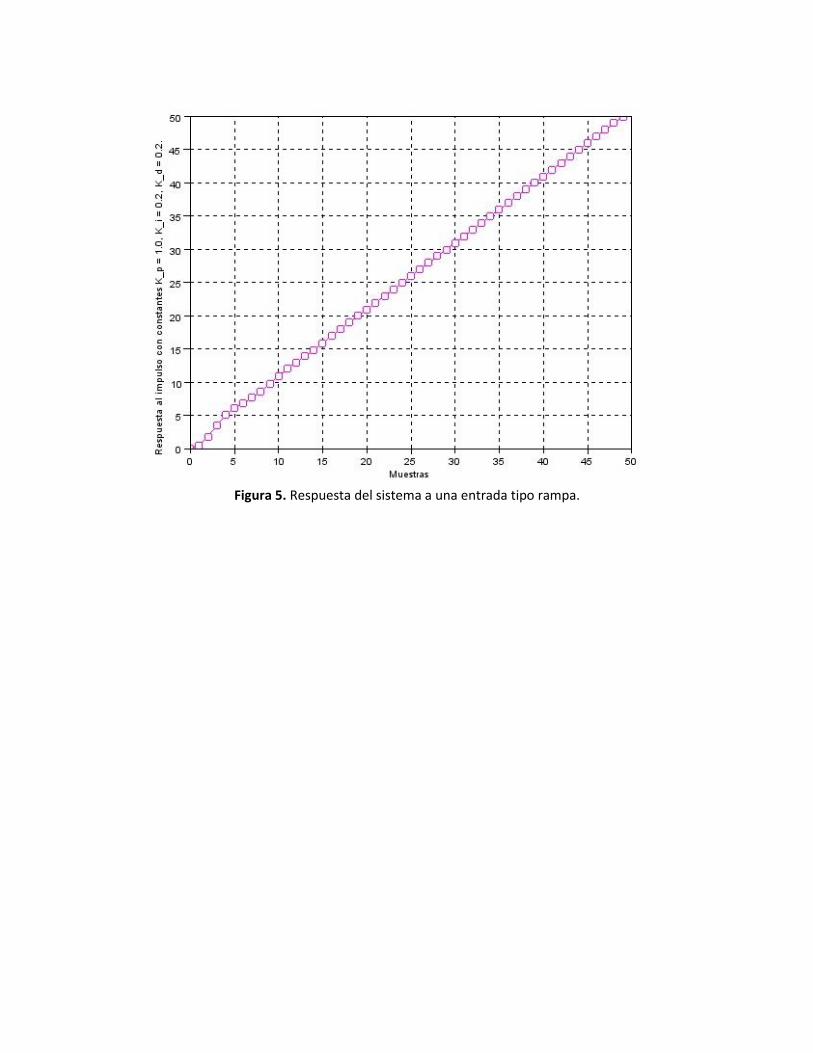
Figura 5. Respuesta del sistema a una entrada tipo rampa.

CONCLUSIONES.
A través de la elaboración de esta práctica fue posible observar el método necesario para
encontrar la respuesta de un controlador PID en tiempo discreto a una entrada de tipo escalón y
rampa unitaria, las cuales son generadas utilizando la aplicación de procesamiento matemático
Scilab, en la cual se introdujeron los valores del controlador PID y se simuló la función de
transferencia de cada uno de los elementos conectados como es el caso del retenedor de orden
cero y de la planta.
Se puede observar cómo al variar las constantes proporcional, integral y derivativa es posible
modificar el tiempo de respuesta y sobretiro de la respuesta de la señal al sistema.
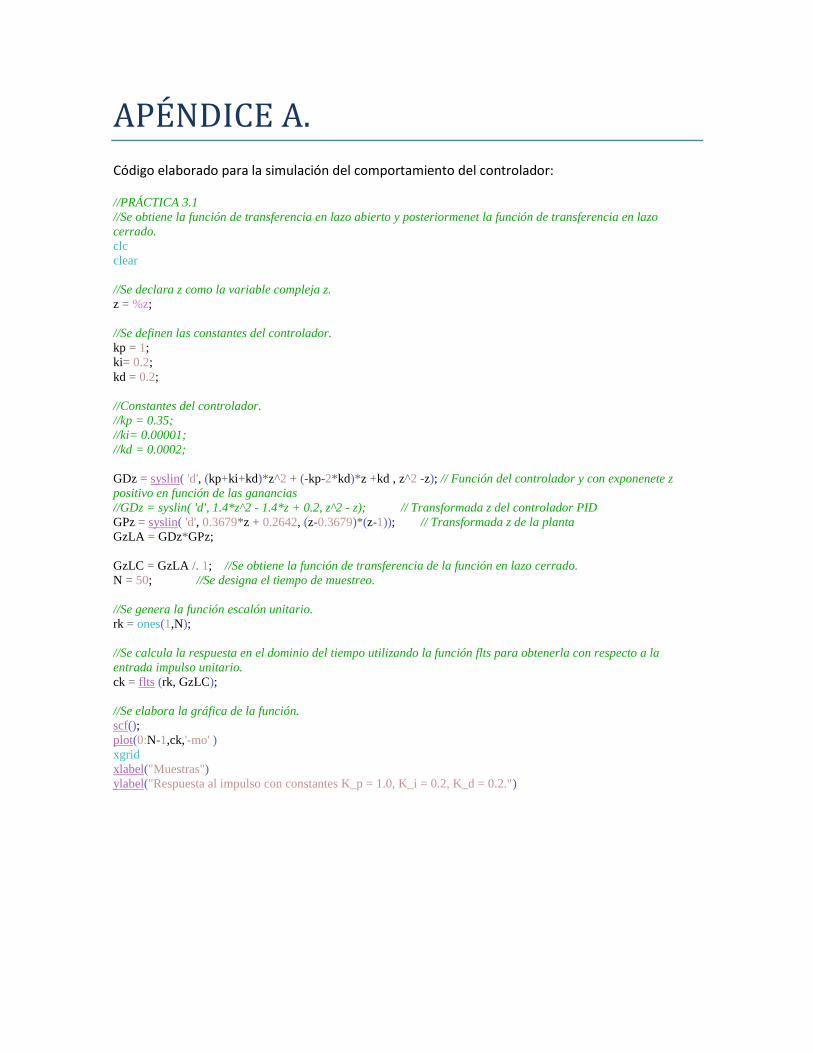
APÉNDICE A.
Código elaborado para la simulación del comportamiento del controlador:
//PRÁCTICA 3.1
//Se obtiene la función de transferencia en lazo abierto y posteriormenet la función de transferencia en lazo
cerrado.
clc
clear
//Se declara z como la variable compleja z.
z = %z;
//Se definen las constantes del controlador.
kp = 1;
ki= 0.2;
kd = 0.2;
//Constantes del controlador.
//kp = 0.35;
//ki= 0.00001;
//kd = 0.0002;
GDz = syslin( 'd', (kp+ki+kd)*z^2 + (-kp-2*kd)*z +kd , z^2 -z); // Función del controlador y con exponenete z
positivo en función de las ganancias
//GDz = syslin( 'd', 1.4*z^2 - 1.4*z + 0.2, z^2 - z); // Transformada z del controlador PID
GPz = syslin( 'd', 0.3679*z + 0.2642, (z-0.3679)*(z-1)); // Transformada z de la planta
GzLA = GDz*GPz;
GzLC = GzLA /. 1; //Se obtiene la función de transferencia de la función en lazo cerrado.
N = 50; //Se designa el tiempo de muestreo.
//Se genera la función escalón unitario.
rk = ones(1,N);
//Se calcula la respuesta en el dominio del tiempo utilizando la función flts para obtenerla con respecto a la
entrada impulso unitario.
ck = flts (rk, GzLC);
//Se elabora la gráfica de la función.
scf();
plot(0:N-1,ck,'-mo' )
xgrid
xlabel("Muestras")
ylabel("Respuesta al impulso con constantes K_p = 1.0, K_i = 0.2, K_d = 0.2.")
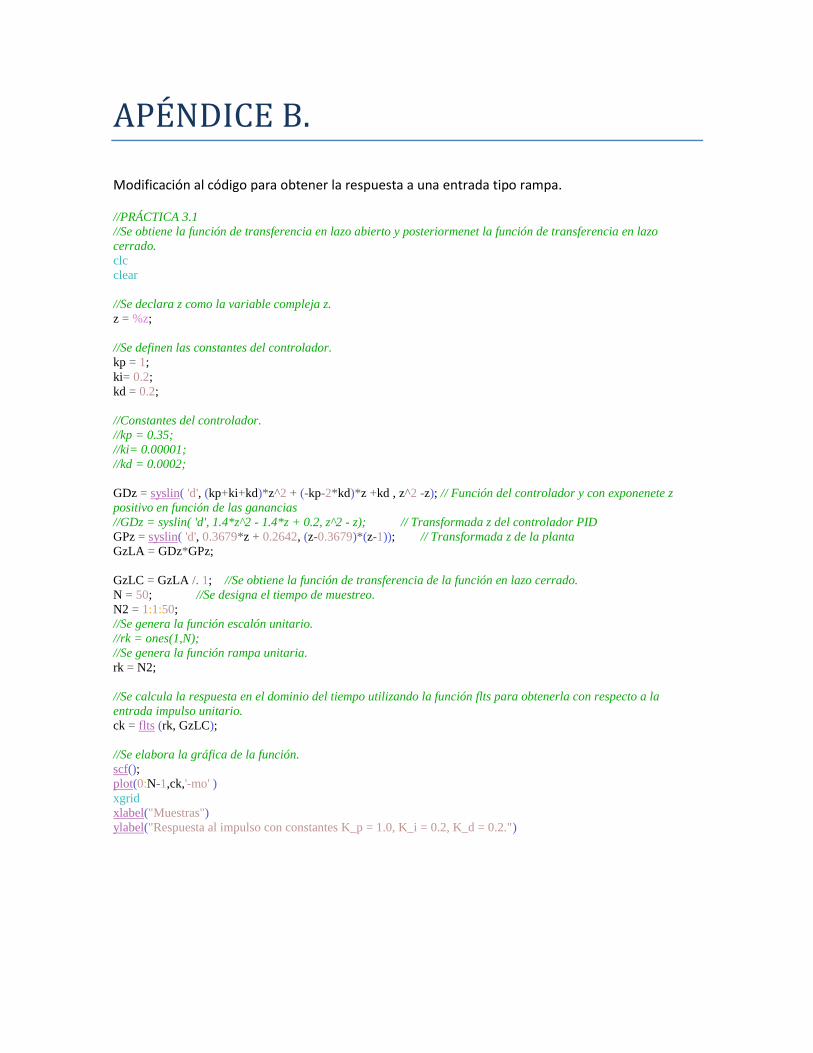
APÉNDICE B.
Modificación al código para obtener la respuesta a una entrada tipo rampa.
//PRÁCTICA 3.1
//Se obtiene la función de transferencia en lazo abierto y posteriormenet la función de transferencia en lazo
cerrado.
clc
clear
//Se declara z como la variable compleja z.
z = %z;
//Se definen las constantes del controlador.
kp = 1;
ki= 0.2;
kd = 0.2;
//Constantes del controlador.
//kp = 0.35;
//ki= 0.00001;
//kd = 0.0002;
GDz = syslin( 'd', (kp+ki+kd)*z^2 + (-kp-2*kd)*z +kd , z^2 -z); // Función del controlador y con exponenete z
positivo en función de las ganancias
//GDz = syslin( 'd', 1.4*z^2 - 1.4*z + 0.2, z^2 - z); // Transformada z del controlador PID
GPz = syslin( 'd', 0.3679*z + 0.2642, (z-0.3679)*(z-1)); // Transformada z de la planta
GzLA = GDz*GPz;
GzLC = GzLA /. 1; //Se obtiene la función de transferencia de la función en lazo cerrado.
N = 50; //Se designa el tiempo de muestreo.
N2 = 1:1:50;
//Se genera la función escalón unitario.
//rk = ones(1,N);
//Se genera la función rampa unitaria.
rk = N2;
//Se calcula la respuesta en el dominio del tiempo utilizando la función flts para obtenerla con respecto a la
entrada impulso unitario.
ck = flts (rk, GzLC);
//Se elabora la gráfica de la función.
scf();
plot(0:N-1,ck,'-mo' )
xgrid
xlabel("Muestras")
ylabel("Respuesta al impulso con constantes K_p = 1.0, K_i = 0.2, K_d = 0.2.")

BIBLIOGRAFÍA.
1. Katsuhiko Ogata. Sistemas de control en tiempo discreto. Pearson. Segunda Edición.