Identificación de accionamiento de motor de inducción con ...
12
energética Vol. XXV, No. 3/2004 Identificación de accionamiento de motor de inducción con bomba centrífuga usando lógica difusa Luis D. Rojas Mario Morera Ángel Columbié Recibido: Septiembre del 2004 Aprobado: Noviembre del 2004 Resumen / Abstract Con el objetivo de indicar zonas de trabajo con mejores rendimientos en los sistemas de accionamientos electrohidráulicos, se realiza una identificación de los subsistemas del motor de inducción con bomba centrífuga encargada del transporte de hidromezclas de pulpas lateríticas, atendiendo a las variables que más participan en la transferencia de energía, y con esto, supervisar y diagnosticar con anticipación su eficiencia. Se muestra un algoritmo con identificación difusa que correlaciona las funciones ofrecidas desde la ecuación de los momentos del accionamiento eléctrico sobre la base de las pérdidas con el fin de minimizar la potencia de entrada del sistema desde su contexto tecnológico y experimental. Palabras clave: lógica difusa, accionamiento eléctrico de bombas, eficiencia de accionamientos With objetive to indicate sure areas of work with high yields in the system of electro-hydraulic workings, its is performance an identification of the subsystems of the induction motor with centrifugal pump that transports pulp latheritic hydromixes, assisting to the variables that more participates in the energy transfer, and with this to supervise and to diagnose their efficiency in advance. A fuzzy algorithm is shown that correlates the functions offered from losses based the moments equation of electric drives with the purpose of minimizing the input power working from the experimental and technological context of the system. Key words: fuzzy logic, electric drives of pumps, efficiency electrical drives TRABAJOS TEORICOEXPERIMENTALES INTRODUCCIÓN Los estudios encaminados a mostrar el comportamiento de un sistema de accionamiento eléctrico del hidrotransporte de un fluido determinado basado en las correlaciones entre sus principales variables de trabajo y el gasto energético para determinadas condiciones de explotación, son de estimable valor para reflejar su racionalidad desde el punto de vista técnico. 1 Es por eso, que resulta muy esclarecedora la evaluación del transporte de hidromezclas lateríticas a partir de datos experimentales y la selección de sus parámetros con mediciones en los subsistemas eléctrico y mecánico, de forma tal que permite establecer un algoritmo de análisis lo suficientemente integral de todo el sistema. Los accionamientos eléctricos son usualmente modelados usando la teoría de circuitos eléctricos con corrientes o flujos enlazados seleccionados como variables de estados para la parte eléctrica y la velocidad o posición del sistema para la parte mecánica. Frecuentemente la estructura interna del
Transcript of Identificación de accionamiento de motor de inducción con ...

energética Vol. XXV, No. 3/2004
Identificación de accionamiento de motorde inducción con bomba centrífugausando lógica difusaLuis D. RojasMario MoreraÁngel Columbié
Recibido: Septiembre del 2004Aprobado: Noviembre del 2004
Resumen / Abstract
Con el objetivo de indicar zonas de trabajo con mejores rendimientos en los sistemas de accionamientoselectrohidráulicos, se realiza una identificación de los subsistemas del motor de inducción con bombacentrífuga encargada del transporte de hidromezclas de pulpas lateríticas, atendiendo a las variables quemás participan en la transferencia de energía, y con esto, supervisar y diagnosticar con anticipación sueficiencia. Se muestra un algoritmo con identificación difusa que correlaciona las funciones ofrecidasdesde la ecuación de los momentos del accionamiento eléctrico sobre la base de las pérdidas con el finde minimizar la potencia de entrada del sistema desde su contexto tecnológico y experimental.Palabras clave: lógica difusa, accionamiento eléctrico de bombas, eficiencia de accionamientos
With objetive to indicate sure areas of work with high yields in the system of electro-hydraulic workings,its is performance an identification of the subsystems of the induction motor with centrifugal pump thattransports pulp latheritic hydromixes, assisting to the variables that more participates in the energy transfer,and with this to supervise and to diagnose their efficiency in advance. A fuzzy algorithm is shown thatcorrelates the functions offered from losses based the moments equation of electric drives with thepurpose of minimizing the input power working from the experimental and technological context of thesystem.Key words: fuzzy logic, electric drives of pumps, efficiency electrical drives
TRABAJOS TEORICOEXPERIMENTALES
INTRODUCCIÓNLos estudios encaminados a mostrar elcomportamiento de un sistema de accionamientoeléctrico del hidrotransporte de un fluido determinadobasado en las correlaciones entre sus principalesvariables de trabajo y el gasto energético paradeterminadas condiciones de explotación, son deestimable valor para reflejar su racionalidad desde elpunto de vista técnico.1
Es por eso, que resulta muy esclarecedora laevaluación del transporte de hidromezclas lateríticas
a partir de datos experimentales y la selección de susparámetros con mediciones en los subsistemaseléctrico y mecánico, de forma tal que permiteestablecer un algoritmo de análisis lo suficientementeintegral de todo el sistema.
Los accionamientos eléctricos son usualmentemodelados usando la teoría de circuitos eléctricos concorrientes o flujos enlazados seleccionados comovariables de estados para la parte eléctrica y lavelocidad o posición del sistema para la partemecánica. Frecuentemente la estructura interna del

sistema de accionamiento eléctrico contienerelaciones no lineales con dificultad para modelar; porejemplo, el tiempo o zona muerta, efectos de histéresisy de saturación.
En accionamientos de altas prestaciones y parapropósitos de control, se necesitan extraerautomáticamente las relaciones características delsistema que determinan las propiedades de sus va-riables de estado y su dependencia analítica.
Esta investigación usa la lógica difusa (LD), comouna herramienta para la modelación automática delsistema de accionamiento eléctrico de bombascentrífugas.
El algoritmo difuso permite generalizar, memorizar yobtener un aprendizaje aproximado del proceso através de un mecanísmo entrenado para estepropósito
La aproximación clásica de la modelación de unsistema de accionamiento eléctrico no comienzacomo una suficiente representación de los sistemasactuales. Los modelos son muy completos pararepresentar algunas relaciones o especificidades delproceso, de manera que contienen una estructura conrelaciones no lineales que dificultan la modelación.Recientes artículos2-4 muestran que la lógica difusaes una herramienta poderosa para representarrelaciones en espacios de estados, y así mismo sepuede introducir más eficazmente el comportamientodinámico del sistema de accionamiento eléctrico yelectromecánico.5,6
La modelación difusa permite incorporar capacidadesde autoaprendizaje dentro del sistema y diseña elesquema de control para compensar los efectosdinámicos de los términos no lineales. Cuando laincertidumbre de algún parámetro es grande, él usaun lazo de realimentación con coeficientes de ajusteque pueden adecuarlo.
MODELACIÓN DIFUSALa modelación usando la técnica difusa consisteinicialmente en duplicar la experiencia experta con laingeniería del conocimiento al control de procesos.7Aunque esta información cualitativa puede presentarlimitaciones como la adquisición de conocimientos,usualmente presenta errores y algunas lagunas. Otrafuente de información es la cuantitativa, la cualusualmente se utiliza junto a la información cualitativapara completar el modelo y así se producen nuevosdatos de información.8
La principal diferencia entre estas aproximaciones estáen cómo representar el conocimiento dentro delmodelo. Mientras la aproximación lingüística describeel comportamiento del sistema a través de reglas detipo IF-THEN usando solo ajustes difusos (variableslingüísticas), la aproximación híbrida usa variableslingüísticas en la parte de la condición de la regla (IF)y usa un valor numérico en la parte de conclusión(THEN) siendo considerada como una función de va-riables de entradas.8
La modelación lingüística puede ser dividida en dostipos:- Modelación relacional.- Modelación natural.
La modelación relacional7,9 establece un ajuste de todaslas reglas posibles basadas en atribuir particioneslingüísticas a cada variable de entrada y salida. Enesta modelación se calcula para cada regla elrespectivo valor de verdad de cómo cada reglacontribuye a describir el comportamiento del sistema.El juego del cálculo de todas las reglas constituyeuna matriz multidimensional.
Usando la teoría de ecuaciones relacionales,10 cadaelemento de la matriz puede ser calculado como elgrado del miembro de la regla en el modelo del sistemaextraído.
La modelación natural no usa las ecuacionesrelacionales para obtener el modelo. Las reglas soncodificadas desde una fuente de información tomadasdesde el proceso por una base de conocimiento deoperador and/or dado en la literatura.11
La modelación híbrida permite el empleo de técnicade aprendizaje usando redes neuronales en laextracción de cada regla.4,12 El ajuste de los parámetrosque componen las condiciones de las reglas formanparte de las funciones de pertenencias con ancho yposición en el universo en discusión. En la parte de laconclusión, los parámetros son términos de la funciónque calcula la conclusión de la regla.
Las técnicas de modelación difusa constituye unanueva y potencial herramienta en el diseño eimplementación de controladores en los acciona-mientos eléctricos y electromecánicos.5,6
MECANISMO DE APRENDIZAJEDurante el proceso de aprendizaje son usados dosdata de ajuste. Una para la etapa de entrenamiento yotra para probar el modelo extraído.

20
Empleando el algoritmo basado en el método de losclusters,13 se extraen las reglas del modelo y su valorde conclusión.
Luego, el modelo tiene que ser sintonizado con suvalor de conclusión por el método del gradientedescendente, donde queda elaborado el proceso delmodelo inverso difuso. Subse-cuentemente, la pruebade los datos de ajuste que tiene ejemplos nopresentados en la fase de entrenamiento es verificadaen el modelo de generalización construido.
INICIALIZACIÓN DEL MODELO USANDO ELALGORITMO DEL MÉTODO DE LOS CLUSTERS
La primera fase de la inicialización de la modelaciónpor el algoritmo del método de los clusters es laconclusión de cada regla.
El concepto de cluster cuando se usa lógica difusa,11
asocia a cada valor de los datos un grado entre ceroy uno que representa el grado de los miembros en laregla. Esto permite que cada muestra de la datapertenezca a un múltiplo de la regla con diferentegrado.
La adquisición de la regla está dada por (1):
[ ] ( )
1 2( . ). .( . . ) . . . . lIF x isPM and x is NM THEN y is z ...(1)
La par te de cond ic ión de la reg la es tácaracterizada por los ajustes difusos PM y NM.La conclusión está dada por z (l)) , extraída sobrela base de los ajustes difusos dentro del dominioPM y NM, representados por círculos llenos enla región de la regla R( l ).
El grado de contribución de cada función en la reglaestá dada por el producto de cada miembro de lacondición en la región del dominio (2), y expresa supeso en el valor de la variable de salida en (y').
).().( 21 xx NMPM µµ ...(2)
Esta operación es ejecutada para cada ejemplo hechoen la región de la regla.
El valor de la conclusión final z(l)) de la regla l escalculada desde la función de pertenencia usando elmétodo del centroide.
El error medio cuadrático se determina como:
= − 21( )2 refE y y ...(3)
SISTEMA DE ACCIONAMIENTOELECTROMECÁNICO: MOTOR ELÉCTRICO+ BOMBA CENTRÍFUGA
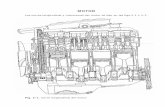
El sistema está compuesto por un motor de inducciónMI (figura 1) que acciona una bomba centrífuga BC queenvía fluido con densidad variable a un recipiente dondese desea mantener constante el envío de la hidromezcla.
Para esto el sistema cuenta con un convertidor defrecuencia tipo inversor sinusoidal de tensión conmodulación por ancho de pulsos, motor de induccióntrifásico MI con rotor de jaula de ardilla (220 V,7,33 N.m, 1 500 rpm), una bomba centrífuga PB 315/40 (360 m3/h, 40 m).
En este se toman mediciones de la presión en lospuntos de succión e impulsión de la bomba BC(figura 2), así como en la sección recta de la tuberíade transporte con el objetivo de calcular las pérdidasdel subsistema.
1Sistema del accionamiento eléctrico del motor de inducción.

21
La medición de presión en los puntos de entrada ysalida de la bomba centrífuga (figura 2) se fundamentaentre otras cosas, en el hecho de conocer la presenciadel fenómeno de cavitación en estas turbo-máquinas,fenómeno muy frecuente en los procesos de transportede fluidos en plantas químicas como es el caso.
Este fenómeno puede ocasionar una sensibleafectación en el trabajo de la bomba BC que se llenade gases o cavidades vacías y es debido a quecuando la presión de succión de la bomba se iguala ala presión de vapor del fluido, y este va pasando alestado gaseoso. Durante esto aparecen fuertessacudidas o vibraciones en la red hidráulica y surendimiento disminuye drásticamente.
Por otra parte, conociendo la diferencia de presiónentre dos puntos o secciones donde se desplazadeterminado volumen de fluido, es posible entoncescalcular su velocidad lineal, aspecto que se observaen la expresión (4).
ρ∆
= =2
. 2.p vHg g ...(4)
donde:H: Altura de carga de presión [m].∆p:Diferencia de presión [Pa].ρ: Densidad de la pulpa [kg/m3].v : Velocidad lineal del fluido [m/s].g: Aceleración de la gravedad [m/s2].
En el caso de la bomba centrífuga, con la mediciónde sus presiones de entrada y salida en el rodete detrabajo es posible determinar la velocidad periféricade impulsión de la hidromezcla, y a partir de locual se pueden predecir las pérdidas y losregímenes de trabajo en la turbo-máquina.
La experimentación ha sido tomada desde unainstalación experimental (figura 3) construida en elInstituto Superior Minero Metalúrgico de Moa;recolectando estos resultados con medicionesrealizadas en los accionamientos de bombascentrífugas de las propia planta minero metalúrgicaComandante Ernesto Che Guevara.
El sistema experimental a escala semiindustrial delaccionamiento eléctrico está compuesto por dosmotores de inducción de jaula de ardilla trifásicos queaccionan una bomba centrífuga de rodete cerrado queenvía material laterítico en forma de pulpa por tuberíasde 102 y 150 mm a un recipiente cerrado a determinadaaltura.
Los componentes de la instalación de hidrotransportedados en la figura 3, donde se experimenta el sistemade accionamiento eléctrico de bomba son:1, 2 y 19 : recipientes de pulpas a diferentesdensidades; 3, 4: bombas centrífugas accionadas pormotores de inducción (55 kW ); 5: instrumentosindicadores de presión [kg/cm2]; 6: tubo de Venturi,para medición de caída de presión (mm de HsO); 7, 8y 9: tubería de 102, 150 y 200 mm de diámetro 10 y11 tubería de 100 mm de diámetro; 12, 13, 14, 15 y17: válvulas de estrangulamiento de tornillos g8:medición del gasto o caudal mediante un flujómetroindicador [m3/h]; p1, p2 , p3 , p4 , p5 , p6: puntos demedición de presión [kg/cm2].
El sistema electrohidráulico tiene un comportamientodominado por la carga que representa la densidad dela pulpa a transportar, porque ella ofrece unadeterminada resistencia a la transferencia de masade fluido que se mueve de un punto a otro en la secciónde tubería y que exige un gradiente de energía cinéticaque tiene su fuente en la potencia de entrada delaccionamiento eléctrico. Ver figuras 4 y 5.
2
BC
Subsistema hidráulico del accionamiento con la bomba centrífuga.

22
Este comportamiento de las pérdidas hidráulicas enfunción de la velocidad de transporte de la cola adiferentes densidades i (Pa/m) vs v (m/s), es unavaliosa información para la sintonización delcontrolador difuso.
GENERACIÓN DE LOS DATOSDE ENTRENAMIENTO
Para obtener alguna información relevante acerca delas leyes físicas que rigen el comportamiento delproceso se usa una base de conocimiento enmarcadaen la conversión electromecánica de la potencia en elaccionamiento y las leyes hidrodinámicas de la turbo-máquina y la red hidráulica. El resultado de lamodelación debe ofrecer la medida del rendimientodel sistema.
Como el sistema contiene un gran número de va-riables que pueden ser seleccionadas para caracterizarsu dinámica, es importante hacer algunasconsideraciones en forma de hipótesis y simplifica-ciones para concentrar la atención en un pequeño perorepresentativo juego de variables.
La conversión electromecánica de energía estárelacionada con la potencia de entrada alaccionamiento y su diferentes manifestaciones en cadaeslabón del sistema hasta llegar y desarrollarse en labomba centrífuga, que es en definitiva el elementoque exige cuantitativamente el nivel.
En esto participan: Pe, la potencia de entrada delaccionamiento eléctrico; w, la frecuencia angular delsubsistema eléctrico que alimentan las variables deentrada del motor eléctrico, y que determina lavelocidad rotacional de la bomba, a partir de lo cualse establece su torque mecánico y que decide lacantidad de fluido enviado a través de la red hidráulica;el valor de la densidad r del fluido o hidromezcla porque
3Accionamiento eléctrico de bombas centrífugas para el transporte de pulpa laterítica.
Potencias medidas a diferentes densidadesen la tubería de 150 mm
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
24 36 50 56 61 67 72 78 82 87 92 100 111 119 121
Q (m3/h)
P (kW)
Cola50% Cola45% Cola40%
Cola30% Cola25% Agua
12
3
4
6
5
0
500
1000
1500
2000
2500
3000
3500
0 0,5 1 1,5 2 2,5 3
v, m/s
i, Pa/m
4
Comportamiento del consumo de potencia eléctrica a diferentesdensidades de la cola laterítica. Al mismo tiempo existe una
relación entre las pérdidas hidráulicas y su velocidad detransporte.
5
Dependencia de i f(v) para el movimiento de las colas en untubo circular (D = 150 mm) a T= 600 C a las concentracione:
1. Agua; 2-25%; 3-30%; 4-40%; 5-45%; 6-50%.

23
de acuerdo con esta será mayor o menor el gradientede energía a desarrollar por la turbomáquina. Unabuena parte de la energía desarrollada por la bombacentrífuga está destinada a transmitirle la energíacinética al fluido y esta la determina la altura de presiónH entregada por la bomba y que depende del valor dela densidad del fluido.
Aunque usualmente se estima una relación casiproporcional entre la potencia consumida y la densidaddel fluido, en el caso de transporte de pulpa lateríticano es así, porque en muchas ocasiones (y lasmediciones diarias lo demuestran), se tienen valoresaltos de potencia en la entrada del accionamiento, sinembargo debido a presencia de gases se propicia elfenómeno de la cavitación con densidades medias,entonces la bomba centrífuga trabaja con un gradientede potencia relativamente más alto que lo estimado;además, para potencias cercanas la pulpa tienedensidades diferentes. Esto quiere decir que la va-riable densidad r es significativa para el análisis delcomportamiento del accionamiento electromecánico.
Por otra parte, el momento de carga está relacionadocon la potencia mecánica desarrollada por la bombacentrífuga, y esta a su vez viene dada por las va-riables que determinan finalmente el rendimiento delsubsistema mecánico, por lo que el torque de cargaestá dado por la función de la expresión (5):
),,,(),,,( ρωρω QHfQpfM c =∆= ...(5)
Dado que el rendimiento del sistema MI - BC estádeterminado por la relación entre la potencia de salida:potencia mecánica en el árbol del motor, y la potenciade entrada: potencia eléctrica del motor, de ahí seinfiere que:
),,,( ρωη HQfb = ...(6)
Como el caudal desarrollado por la bomba es unafunción de su velocidad y por tanto de la frecuenciaangular, y considerando que la relación entre el cau-dal de la bomba y su altura de carga es conocida, ydetermina, la expresión (7) que es conocida como lavelocidad específica de la turbomáquina BC:
4/3
.H
Qnn b
esp = ...(7)
donde:nb es el número de revoluciones de la bombacentrífuga, la cual ofrece una medida de su capacidadproductiva para transportar el fluido. El número de
revoluciones de la bomba nb viene determinado a suvez por la frecuencia angular ω. Entonces elsubsistema hidráulico puede ser representado, enforma simplificada, por una relación funcional dadapor:
),( ρespnfy = ...(8)
El rendimiento del sistema de accionamiento electro-hidráulico es una función de variables tanto del motoreléctrico MI como de la bomba centrífuga BC; dondeesencialmente interviene la potencia de entrada Pedel motor tomada desde el inicio del sistema, lafrecuencia angular de la corriente del motor que de-fine la velocidad de rotación del accionamiento y quedetermina la velocidad periférica de transporte delfluido, la caída de presión entre entrada y salida de labomba, y la densidad r de la hidromezcla.
( , , , , )bf PeQ pη ω ρ= ∆ ...(9)
La relación (9), facilita el análisis de las propiedadesprincipales presentada por el algoritmo de lamodelación difusa del sistema MI - BC, cuando seusa un sistema real, teniéndose en cuenta que lainfluencia de la temperatura está implícita en el valorde la densidad específica de la hidromezcla.15
Pero atendiendo a la expresión simplificada dada en(8), el rendimiento del sistema MI - BC puede serevaluado sintéticamente por tres variables: la potenciade entrada Pe del motor eléctrico, la velocidadespecífica nesp desarrollada por la bomba centrífuga yla densidad del fluido r, que en este caso es la densidadde la pulpa, tal como (10):
( , , )espf P e nη ρ= ...(10)
Para esto dos diferentes juegos de valoresexperimentales son adquiridos durante el proceso demodelación, un juego para el entrenamiento y otro paralas pruebas.
MODELACIÓN DIFUSA DEL ACCIONAMIENTOELÉCTRICO DE BOMBA CENTRÍFUGA
La modelación usando algoritmo difuso está basadoen el juego de los datos de entrenamiento.
El modelo difuso esta compuesto por funciones depertenencias triangulares atribuidas a una señal dereferencia yref , 11 funciones de pertenencias triangu-lares de la señal de la potencia de entrada; 11funciones de pertenencias triangulares de la señal de

24
la velocidad específica de la bomba centrífuga; asícomo 7 funciones de pertenencias gaussiana de ladensidad ρ.
El primer paso del proceso de modelación extrae elmodelo difuso utilizando el algoritmo basado en elmétodo de los cluster.
Para el ajuste fino del modelo inicial anterior se usa elmétodo del gradiente descendente. Para el procesode aprendizaje, los parámetros utilizados por elalgoritmo fueron: 50 iteraciones (K = 50) de una ratade aprendizaje de 0,8; lo mismo para el modelo difusousando el algoritmo del método de los clusters.
ALGORITMO DE APRENDIZAJE DIFUSOLas variables antecedentes reciben diferentes gradoslingüísticos que pueden ser:NB - muy negativo; NM - medio negativo; NS - pequeñonegativo; ZE - cero; PS - pequeño positivo.PM - medio positivo; PB - muy positivo.
Así los espacios de entrada están particionados enajustes de reglas difusas, tal como se muestra en lafigura 6.
La figura 6 representa tres reglas de un modelocompuesto por dos variables antecedentes x1, x2 conla salida y cada celda en la figura compone una reglacon la siguiente forma, por ejemplo, para celda blanca,
IF (x1 es (PM)) y (x2 es (NM)) THEN y = (PB)
Los pasos principales del proceso de aprendizaje sedetallan en las referencias 4 y13.
Se tienen algunos resultados que dirigen laobservación del proceso de hidrotransporte hacia el
comportamiento de la potencia de entrada delaccionamiento (relacionada con las tensiones ycorrientes de línea de convertidor de frecuencia, en loque se incluye la tensión de directa del circuito deenlace del inversor sinusoidal), así como la velocidaddel flujo de la pulpa y su densidad determinada por laconcentración del material sólido en ella.16-18
Es usual, durante el transporte de pulpa laterítica encondiciones de tecnología CARON que se realiza adiferentes temperaturas y a través de bombascentrífugas donde están presente elementos enestado sólido, líquido y también gaseosos. Estosúltimos ocasionan cavidades indeseadas en lastuberías y disminuyen sensiblemente el rendimientode las instalaciones de hidrotransporte. Es por ello,además, que en este trabajo se muestra gráficamentecómo se comportan las pérdidas en el transporte adiferentes densidades.
Un fluido recién caracterizado es el de los residuoslixiviados de laterita o también denominado colas, dela empresa Comandante Ernesto Che Guevara de Moa,cuyo modelo reológico.19 ofrece los elementos para lamodelación de su hidrotransporte. Es de interésmostrar las diferentes correlaciones entre variables,utilizando la base de conocimientos desde los ensayosy mediciones experimentales realizadas en el procesode transporte, de cola desde la Planta de Lixiviaciónhacia un depósito o dique, y complementando dichoestudio a través de la modelación semiindustrial en lainstalación experimental de hidrotransporte del ISMMde Moa.
La base de conocimientos construida para sumodelación por lógica difusa, está formada por la basede datos y la base de reglas que permiten la toma dedecisiones reflejadas en el algoritmo de dirección delproceso, elaborados por observaciones muy detalladasy mediciones de operarios expertos.
Sistema particionado y genera funciones de pertenencias.
6

25
Modelos matemáticos1. Motor de inducción trifásico: Las ecuaciones delmotor eléctrico MI basadas en la Teoría del CapoOrientado donde tienen mayor incidencia lasexpresiones siguientes:
Las relaciones entre las corrientes y tensiones en losejes dd y qq con sus componentes están defi-nidas por:
dss s d s e s qs ds
diL R i L i Udt
σ ω σ= − + + ... (11)
qs ms s qs e s ds e dr qs
r
di LL R i L i Udt L
σ ω σ ω ψ= − − − + ...(12)
mdsdr Li=ψ ...(13)
El torque o momento electromagnético Mem es tomadopor:
1,5 ( )em sd sq sq sdM p i iψ ψ= − ...(14)
donde:p: Número par de polos del motor eléctrico.Uds, Uqs: Tensiones en el estator del motor en los ejesdd-qq, [V]h.Udr, Uqr : Tensiones en el rotor en los ejes dd-qq [V].ids, iqs : Corrientes en el estator en los ejes dd-qq [A].iqs, iqs : Corrientes en el rotor en los ejes dd-qq [A].ψds, ψqs : Flujos magnéticos en el estator en los ejesdd-qq, [Wb];ψds, ψqs : Flujos magnéticos en el rotor en los ejes dd-qq, [Wb]h.Ls, Lr : Inductancias en los devanados del estator yrotor, [mH]; LM: Inductancia mutua del motor eléctrico,[mH];σ : Llamado Coeficiente de Blonde.También se puede escribir de todo esto:
1,5( )em sq dr sd qrM i iψ ψ= + ...(15)
Y hace el enlace entre las variables eléctricas y lacarga mecánica de acople en el motor MI . Las
ecuaciones para el proceso dinámico del motortomando la aceleración angular y la velocidad en elárbol del motor son expresada por:
em c r rM M sJ B− = Ω + Ω ...(16)
donde:J: Valor de la inercia total del motor más la de la bombaBC, [kg.m/s2].Mc: Momento o torque de carga desde el sistemahidráulico [N.m].
em cr
M MsJ B
−Ω =+ ...(17)
SUBSISTEMA HIDRÁULICOTeóricamente el caudal desarrollado por la bomba enel circuito hidráulico es función de la velocidad angularde rotación Ω r y está depende de la frecuenciaangular ω.
( )b bQ Q ω= ...(18)
Y el flujo o caudal de enlace es proporcional a ladiferencia de presión ∆p a través de la bomba como:
( )b l l succ impQ K p K p p= ∆ = − ...(19)
donde:K: Coeficiente de enlace o proporcionalidad de labomba.
Una variación ∆V de cierto volumen del fluido bajopresión es proporcional a la diferencia de presión∆p en el volumen, y proporcional al volumen totaldel fluido. El volumen que cambia es entonces dadopor:
VV pβ
∆ = ∆ ...(20)
dondeβ: Modulo del medidor de gasto o caudal del fluido. Lacompresibilidad del fluido es expresada por:
lim0c
V VdpQ t t dtβ∆
= =∆ → ∆ ...(21)

26
La capacidad del caudal absorbida por la bombacentrífuga corresponde con el cambio del volumende la bomba BC, el cual es expresado como:
lim0o
V AdyQ Avt t dtβ∆
= = =∆ → ∆ ...(22)
dondeA: Área de la sección de salida de la bomba [m2].y: Desplazamiento del fluido [m].v: Velocidad del fluido a la salida del rodete de trabajode la bomba [m/s].
El caudal desarrollado por la bomba BC está acordecon la masa de fluido desplazada, que lo componenlos caudales dados por la bomba, menos el caudal decirculación en el rodete de trabajo de la bomba y elcaudal gastado durante la compresibilidad en elproceso de transferencia de flujo hacia la salida:
Las ecuaciones del subsistema mecánico son:
. .102.b
b
H QN ρη
= ...(23)
Nb: Potencia mecánica desarrollada por la bombacentrífuga [kW].Q : Caudal o gasto desarrollado por la bomba [m3/h].r : Densidad específica del f luido [kg/m3] .hb: Representa el rendimiento de la bomba [%].g : Aceleración de la gravedad [m/s2].
El momento de carga Mc es función de la potencia yel número de revoluciones de la bomba.
( , , , ) ( , , , )cM f p Q f H Qω ρ ω ρ= ∆ = ...(24)
Dado que el rendimiento del sistema MI - BC estádeterminado por la relación entre la potencia de salida:potencia mecánica en el árbol del motor, y la potenciade entrada: potencia eléctrica del motor, de ahí seinfiere que:
( , , , )b f Q Hη ω ρ= ...(25)
Considerando el fluido hidráulico como incompresible.Esta hipótesis es válida desde el volumen total delfluido usado en nuestra instalación, con valores de lapresión adecuados, y el circuito hidráulico está hechode líneas de tuberías medianamente largas. Como
el caudal desarrollado por la bomba es una función desu velocidad y por tanto de la frecuencia angular, yconsiderando que la relación entre el caudal de la bombay su altura de carga es conocida, el subsistema hidráulicopuede ser representado, en forma simplificada, por unarelación funcional dada por:
( , , , )y f Q pω ρ= ∆ ...(26)
El rendimiento del sistema electrohidráulico es unafunción de variables tanto del motor eléctrico MI comode la bomba centrífuga BC; donde esencialmenteinterviene la potencia de entrada Pe del motor tomadadesde el inicio del sistema, la frecuencia angular dela corriente del motor que define la velocidad derotación del accionamiento y que determina lavelocidad periférica de transporte del fluido, la caídade presión entre entrada y salida de la bomba, y ladensidad ρ de la hidromezcla.
( , , , , )e bf P Q pη ω ρ= ∆ ...(27)
La relación (27), a simple inspección, puede facilitarel análisis de las propiedades principales presentadaspor el algoritmo de la modelación difusa del sistemaMI-BC, cuando se usa un sistema real, teniéndose encuenta la influencia de la temperatura que estáimplícita en el valor de la densidad específica de lahidromezcla.15
La transferencia de potencia electromagnética delmotor MI en mecánica rotacional en la bombacentrífuga BC está asociada con las componentesactivas y reactivas de la energía que desarrolla elaccionamiento.
La ecuación principal del accionamiento en funciónde los momentos o torques desarrollados en su árbolestá dada:
( )rem c T r
dM J M Bdtω ω ω= + + ...(28)
donde:Mem : Momento electromagnético del motor deinducción [N.m].J : Momento de inercia de las partes rotatorias delmotor [N.m/s2].Mc : Momento de carga mecánica de la bombacentrífuga [N.m].ωr : Velocidad angular de rotación del rotor [rad/s].B : Coeficiente que tiene en cuenta la fricción en losrodamientos del motor.

27
Entonces es posible escribir la ecuación de losmomentos del accionamiento como:
. . .( )102r
em rb tr r
d H v AM J Bdtω ρ
ωη η ω
= + + ...(29)
Queda entonces:
. . .102.em
b tr r
H v A dM J Bdtρ ω
ωη η ω
− = + ...(30)
En esta expresión (30) se precisa la componente mecánicadel torque resistivo que ejerce la bomba en el sistema deaccionamiento eléctrico. Esto ayuda a elaborar unmecanismo de entrenamiento para el aprendizaje delcomportamiento de las variables del sistema, obtenidasdesde los parámetros dependientes corriendo a diferentesniveles de cargas del accionamiento.
RESULTADOSEl comportamiento del error de la señal adquirida porla modelación y la eficiencia del accionamiento debomba centrífuga con diferentes cargas mecánicas.
En la figura 7 se observa que el error obtenido con ladiferencia entre la medición desde el objeto físico y elestimado en la simulación durante el proceso deaprendizaje por la técnica difusa no supera un 2,5 %.
Para la bomba centrífuga tipo PB-315/40 el rendimientoenviando pulpa con densidades de 1200 a3 800 kg/m3 se comporta 53 y 59 % (figura 8), operandocon su velocidad nominal de 1500 r/pm. Estosrendimientos se pueden mejorar cuando se transportala pulpa laterítica a menores velocidades, entre 680 a930 r/pm, debido a que las pérdidas hidráulicas sonmenores a menor velocidad periférica de transporte.
Error durante el proceso de aprendizaje.7
Rendimientos de la bomba PB-315/314 con diferentesdensidades obtenidas desde la identificación del sistemaelectrohidráulico.
9
8
Curvas de las bombas centrífugas tipo WARMAN en el transportede pulpa laterítica.
De la modelación se resume en la figura 9, un gráficode rendimientos a diferentes número de revolucionesde esta bomba PB-315/40 y un comportamiento muyparecido en las bombas de marca WARMAN.
En la figura 10, se muestran las curvas de la redhidráulica con la de la bomba cuando se realiza laregulación del gasto o caudal del sistema por mediode la estrangulación de la válvula en la tubería deimpulsión, donde se pierde un apreciable gradiente enla altura de carga de presión que hace disminuirsensiblemente la eficiencia de la bomba centrífuga.

28
CONCLUSIONES• El gasto energético del hidrotransporte de pulpalaterítica está relacionado no solo por el volumende mineral sino que además intervienen las va-riables definidas por las propiedades físico-mecánicas del material transportado.• Es apreciable la influencia de la densidad oporcentaje de sólido en peso de las hidromezclasen el comportamiento estructural y energético delhidrotransporte de pulpas residuales, y debe sertenido en cuenta en los algoritmos de control delaccionamiento.• Es válida la base de conocimientos desarrolladapara el diseño de esquemas de control deaccionamientos del hidrotransporte de colasteniendo en cuenta los parámetros de lossubsistema eléctrico y mecánico, y sirve de basede datos para las reglas de aprendizaje enalgoritmos difusos.• La utilización de la modelación difusa en el objetodel sistema de accionamiento eléctrico de bombacentrífuga encargado del transporte de pulpalaterítica resulta una buena herramienta paramodelar este proceso y permite la simulaciónadecuada del sistema.• El algoritmo por el método de los clusters permiteestablecer con buena aproximación la zona deldominio que representaría los valores más fielesde operación ef ic iente del s istema deaccionamiento de hidrotransporte de laterita.• El mecanismo de aprendizaje es una herramientaverificable para el algoritmo difuso implementado,
Curvas de la bomba PB-315/40 durante la regulación porestrangulamiento del caudal.
ya que el rango de error menor a 2,5 % está dentrode lo permisible.
REFERENCIAS1. Rojas Purón, L. y M. Morera Hernández: Controlde eficiencia de accionamiento de bomba centrífugausando lógica difusa. SIE-2003. Universidad Centralde Las Villas, Santa Clara, noviembre, 2003.2. Sugeno, M. and K. Tanaka: "SuccessiveIdentification of a Fuzzy Model and its Applications toPrediction of a Complex System," Fuzzy Set Syst.,Vol. 42, pp. 315-334, 1991.3. Sugeno, M. and T. Yasukawa: "A Fuzzy-Logic-Based Approach to Qualitative Modeling," IEEE Trans,Fuzzy Systems, Vol. 1, pp. 7-31, February, 1993.4. Wang, L. X. and J. Mendel: "Generating FuzzyRules by Learning From Examples," IEEE Trans. onSyst. Man and Cybernetics, Vol. 22, No. 6, July, 1992.5. Costa Branco, P. J. and J. A. Dente: "NewApproaches on Structure Identification of Fuzzy Models:Case Study in an Electromechanical System," in FuzzyLogic, Neural Networks, and Evolutionary Computation(LNCS/Lecture Notes in Artificial Intelligence), T.Furuhashi and Y. Uchikawa eds, Berlin, Germany:Springer-Verlag, pp. 104-143, 1996.6. ______: "The Application of Fuzzy Logic in AutomaticModeling Electromechanical Systems", Fuzzy Sets andSystems, Vol. 95, No. 3, pp. 273-293, 1998.7. Pedry CS,W.A.: "Identification of Fuzzy RelationalSystems", Fuzzy Sets and Systems, Vol.13,pp.153-167, 1984.8. Takagi, T. and M. Sugeno: Fuzzy Identification ofSystems and Its Applications to Modeling and Control.IEEE. Trans. on Systems Man and Cybernetics.Vol. SMC-15. No.1, pp. 116-132. 1998.9. Costa Branco, P. J.: "Learning from Examples UsingFuzzy Logic in Modeling and Control of Electro-Hydraulic Actuator", Doctoral Thesis, Lisboa, July,1998.10. Higashi, M. and G. Klir: "Identification of FuzzyRelational Systems". IEEE Trans on Systems Man andCybernetics, Vol. SMC-14, No. 2, pp. 349-355, 1993.11. Moblad, L. and J. Ostergaard: Control of CementKilu by Fuzzy Logic, pp. 398-400, Editions AproximateReasoning in Decision Analysis, Amsterdand, Holland,1982.12. Low, T.; T. Lee and H. Lim: "A Methodology forNeural Network Training for Control of Drives withNonlinearities," IEEE Trans. on Industrial Electronics,Vol. 40, No. 2, April, 1993.13. Wang, L.: Adaptive Fuzzy Systems and Control,Prentice Hall, 1995.14. Bezdek, J. C, and S. K. Pal: "Fuzzy Models for PatternRecognition", IEEE Press, Piscataway, N.J., 1992.15. Rojas Purón, L. y M. Morera Hernández:Supervisor gráfico de accionamiento eléctrico asistido
10

29
por MATLAB. Taller Nacional de NTIC aplicadas a laIngeniería Eléctrica, CUJAE, Cuidad de La Habana,Junio, 2003.16. Rojas Purón, L.; M. García Renté; R. Izquierdoy R. Pérez Barreto: Matriz GEM: una llave deoptimización de accionamientos de bombas para pulpalaterítica. FIE 2002, Santiago de Cuba, Junio, 2002.17. Turro, A.; G. Railian y B. Dakuskin: "Influencia delnivel de reserva en la capacidad de trabajo de lossistemas de bombeo", Máquinas Mineras yElectromecánica, No. 3, San Peterburgos, Rusia, 2002.18. Turro, A.; L. Garcell y R. Izquierdo: "Influenciade diferentes factores sobre el comportamientoreológico de las suspensiones de desechos lixiviados(colas) del proceso industrial CARON. Revista deTecnología Química, No. 3, Universidad de Oriente,Santiago de Cuba, 2002.19. Turro, A. y otros: "Estudio del hidrotransporte delas calas en el proceso carbonato amoniacal", Tesisdoctoral, ISMM, Moa, diciembre, 2002.
AUTORESLuis Delfín Rojas PurónIngeniero Electricista, Profesor Auxiliar, Departamentode Ingeniería Eléctrica, Instituto Superior MineroMetalúrgico de Moa, Moa, Cubae-mail:[email protected]
Mario Morera HernándezIngeniero Electricista, Doctor en Ciencias Técnicas,Profesor Titular, Centro de Investigaciones y PruebasElectroenergéticas (CIPEL), Instituto SuperiorPolitécnico José Antonio Echeverría, Cujae, Ciudadde La Habana, Cubae-mail:[email protected]
Ángel Oscar Columbié NavarroIngeniero Electricista, Doctor en Ciencias Técnicas,Profesor Titular, Instituto Superior Minero MetaIúrgicode Moa, Moa, Cuba
CUJAE1964-2004
40 años de fundada