
unimath2015.files.wordpress.com · ´INDICE GENERAL ´Indice general II 1 L´ımites 1 1.1...
105
Matem´ aticas para los Negocios Universidad del Pac´ ıfico Ciclo 2018-II I
Transcript of unimath2015.files.wordpress.com · ´INDICE GENERAL ´Indice general II 1 L´ımites 1 1.1...
Matematicas para los Negocios
Universidad del Pacıfico
Ciclo 2018-II
I

INDICE GENERAL
Indice general II
1 Lımites 11.1 Definicion intuitiva y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Propiedades del lımite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Pautas para el calculo de lımites . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Lımites laterales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Lımites infinitos y asıntotas verticales . . . . . . . . . . . . . . . . . . . . . . . . 71.6 Pautas para el calculo de lımites infinitos . . . . . . . . . . . . . . . . . . . . . . . 9
2 Lımites al infinito. Asıntotas. Continuidad. 112.1 Lımites al infinito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Asıntotas horizontales y oblıcuas . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4 Tipos de discontinuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Derivadas 193.1 La derivada. Definicion y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Algebra de derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Topicos de derivacion 244.1 Regla de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.2 Derivacion logarıtmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3 Derivadas de orden superior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 La regla de L’Hopital. Derivada de funciones implıcitas 305.1 La regla de L’Hopital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2 Derivacion implıcita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3 Razon de cambio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
II

5.4 Variacion aproximada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Valor aproximado. Aplicaciones a la Economıa. Monotonicidad. 416.1 Valor aproximado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.2 Aplicaciones a la economıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.3 Monotonicidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7 Maximos y mınimos. Convexidad. 497.1 Maximos y mınimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497.2 Concavidad y Convexidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517.3 Trazado de curvas planas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
9 Funciones de varias variables. Derivadas parciales 549.1 El espacio Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 549.2 Representacion grafica de funciones de dos variables . . . . . . . . . . . . . . . . 569.3 Curvas de nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
10 Derivadas Parciales. Funciones homogeneas 6110.1 Derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6110.2 Regla de la Cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6310.3 Funciones Homogeneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6410.4 El teorema de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
11 Maximos y mınimos de funciones de varias variables 6811.1 Derivadas parciales de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . 6811.2 Maximos y mınimos globales y locales. Puntos crıticos . . . . . . . . . . . . . . . 6911.3 Optimizacion sin restricciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
12 Optimizacion con restricciones 78
13 La integral indefinida 8413.1 Primeras integrales. Propiedades algebraicas . . . . . . . . . . . . . . . . . . . . . 8513.2 Metodos de integracion: sustitucion . . . . . . . . . . . . . . . . . . . . . . . . . 8813.3 Integracion por partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
14 Descomposicion en fracciones parciales. La integral definida. 9014.1 Integracion de funciones racionales por desarrollo en fracciones parciales . . . . . 9014.2 La integral definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9214.3 Propiedades de la integral definida . . . . . . . . . . . . . . . . . . . . . . . . . . 9314.4 El primer teorema fundamental del calculo . . . . . . . . . . . . . . . . . . . . . . 95
15 Area entre curvas y aplicaciones de la integral definida 9615.1 Area entre curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9615.2 Excedente de los productores y de los consumidores . . . . . . . . . . . . . . . . . 98

SEMANA 1
L IMITES
1.1. Definicion intuitiva y ejemplosEn adelante, siempre que mencionemos la palabra intervalo, nos referiremos a intervalo no
degenerado, es decir, excluiremos los casos intervalo vacıo e intervalo formado por un unico punto.Dado un intervalo I de R, denotaremos por I al intervalo I anadiendole sus extremos, en caso
no los contenga (note que ±∞ no cuentan como extremos). Por ejemplo si I =]2,+∞[ entonces
I = [2,+∞[. Sean I1, . . . , Ir intervalos de R y A =r⋃i=1
Ii. Definimos
A =r⋃i=1
Ii.
Por ejemplo si A = R \ {4} =]−∞, 4[∪]4,+∞[ entonces A =]−∞, 4] ∪ [4,+∞[= R.Para motivar la definicion de lımite, consideremos la funcion f : R \ {4} → R, definida como
f(x) =x2 − 16
4√x− 8
.
Note que el punto x0 = 4 no pertenece al dominio de f . De hecho, si intentamos evaluar f enx0 = 4, tenemos 42 − 16 = 0 en el numerador y 4
√4 − 8 = 0 en el denominador, lo que no
tiene ningun sentido. Observe tambien que f puede ser evaluado en cualquier x que no sea 4, enparticular, x puede tomar valores muy cercanos (pero diferentes) a 4. Por ende podemos considerarla siguiente tabla
x 3.8 3.9 3.99 3.999 4.001 4.01 4.1 4.2
f(x) 7.70125 7.85031 7.985 7.9985 8.0015 8.015 8.15031 8.30125
Si extendemos la tabla para mostrar valores de f(x) cuando x es aun mas cercano a x0 = 4,podremos observar que el valor de f(x) se acerca cada vez mas a L = 8. Esto nos permite deducir
1
y = f(x)
x0
L
x
f(x)
←
→
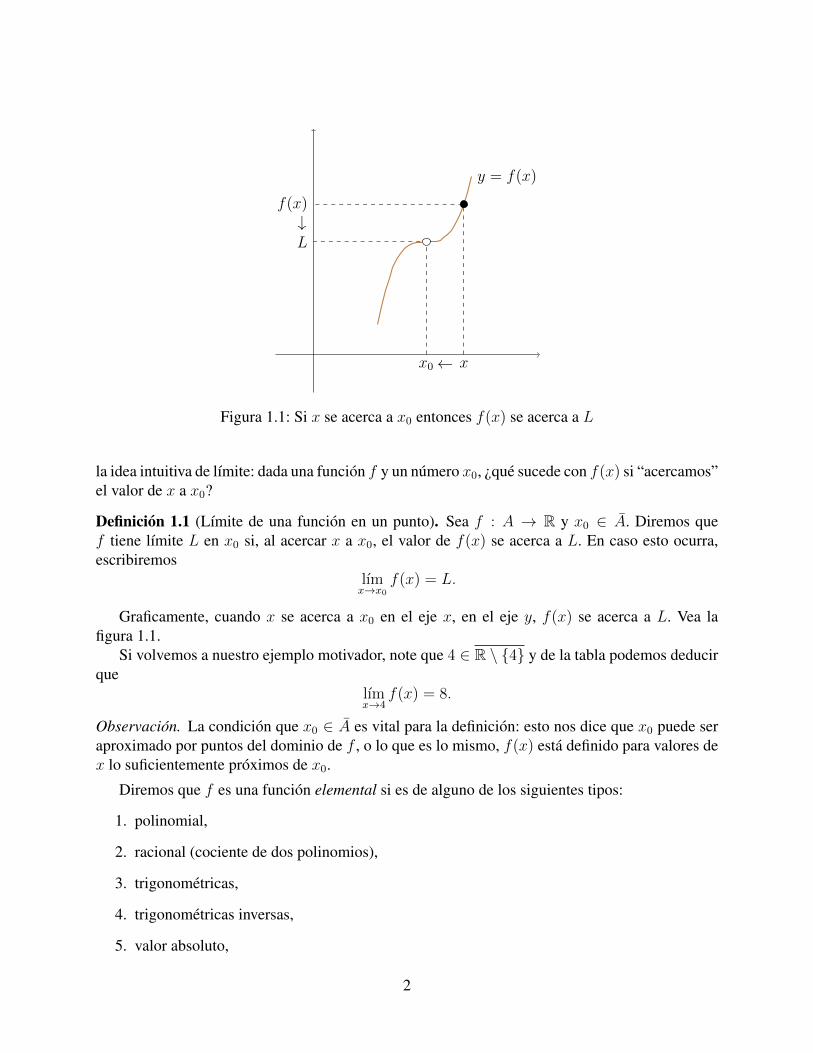
Figura 1.1: Si x se acerca a x0 entonces f(x) se acerca a L
la idea intuitiva de lımite: dada una funcion f y un numero x0, ¿que sucede con f(x) si “acercamos”el valor de x a x0?
Definicion 1.1 (Lımite de una funcion en un punto). Sea f : A → R y x0 ∈ A. Diremos quef tiene lımite L en x0 si, al acercar x a x0, el valor de f(x) se acerca a L. En caso esto ocurra,escribiremos
lımx→x0
f(x) = L.
Graficamente, cuando x se acerca a x0 en el eje x, en el eje y, f(x) se acerca a L. Vea lafigura 1.1.
Si volvemos a nuestro ejemplo motivador, note que 4 ∈ R \ {4} y de la tabla podemos deducirque
lımx→4
f(x) = 8.
Observacion. La condicion que x0 ∈ A es vital para la definicion: esto nos dice que x0 puede seraproximado por puntos del dominio de f , o lo que es lo mismo, f(x) esta definido para valores dex lo suficientemente proximos de x0.
Diremos que f es una funcion elemental si es de alguno de los siguientes tipos:
1. polinomial,
2. racional (cociente de dos polinomios),
3. trigonometricas,
4. trigonometricas inversas,
5. valor absoluto,
2

6. raız cuadrada, cubica, etc,
7. exponencial y logaritmo.
Proposicion 1.2. Sea f : A→ R una funcion elemental y x0 ∈ A. Entonces
lımx→x0
f(x) = f(x0).
Ejemplo 1.3. Considere f : R\{3} → R, definida por f(x) =x2 − 9
x− 3. Note que f es una funcion
racional. Por la proposicion anterior, si por ejemplo elegimos x0 = 1 podemos concluir
lımx→1
x2 − 9
x− 3=
12 − 9
1− 3=−8
−2= 4.
Por otro lado, si elegimos x0 = 3 entonces no podemos usar la proposicion anterior pues 3 nopertenece al dominio de f . Para calcular el lımite, observamos que para cualquier x 6= 3,
f(x) =x2 − 9
x− 3=
(x− 3)(x+ 3)
x− 3= x+ 3.
Por lo tanto
lımx→3
x2 − 9
x− 3= lım
x→3x+ 3 = 6.
Ejercicio 1.4. Considere f : R→ R definida como
f(x) =
{x+ 1, si x < 2,
2− x, si x ≥ 2.
Verifique graficamente que el lımite lımx→2
f(x) no existe.
Ejemplo 1.5. Es posible probar los siguientes lımites:
1. lımx→0
sen(x)
x= 1.
2. lımx→0
1− cos(x)
x= 0.
3. lımx→0
(1 + x)1/x = e.
3

1.2. Propiedades del lımiteProposicion 1.6. El lımite de una funcion en un punto es unico.
Teorema 1.7 (Algebra de lımites). Sea A ⊂ R intervalo o union de intervalos, x0 ∈ A y f, g :A→ R tales que
L = lımx→x0
f(x), M = lımx→x0
g(x).
Entonces
1. f + g tiene lımite en x0 y lımx→x0
(f + g)(x) = L+M ;
2. f · g tiene lımite en x0 y lımx→x0
(f · g)(x) = L ·M ;
3. Para cada λ ∈ R, λ · f tiene lımite en x0 y lımx→x0
(λ · f)(x) = λ · L;
4. Si M 6= 0,f
gtiene lımite en x0 y lım
x→x0
(f
g
)(x) =
L
M.
Proposicion 1.8. Sea A un intervalo o union de intervalos, f : A → R tal que lımx→x0
f(x) = L.
Entonces lımx→x0
|f(x)| = |L|.
Proposicion 1.9. Sea A intervalo o union de intervalos, sea f : A→ R una funcion y sea x0 ∈ Atal que lım
x→x0f(x) = L 6= 0. Entonces
lımx→x0
1
f(x)=
1
L.
Proposicion 1.10. Sea f : I → R tal que f(x) ≥ 0, para todo x ∈ I , y sea x0 ∈ I . Si existeL = lım
x→x0f(x) pruebe que L ≥ 0 y ademas
lımx→x0
√f(x) =
√L.
Teorema 1.11 (Teorema del sandwich). Sea A un intervalo o union de intervalos y sean f, g, hdefinidas en A tales que f(x) ≤ g(x) ≤ h(x), para todo x ∈ A. Si x0 ∈ A y lım
x→x0f(x) =
lımx→x0
h(x), entonces lımx→x0
g(x) existe y
lımx→x0
f(x) = lımx→x0
g(x) = lımx→x0
h(x).
Corolario 1.12. SeaA intervalo o union de intervalos, f : A→ R una funcion y x0 ∈ A. Entonces,lımx→x0
f(x) = 0 si, y solamente si, lımx→x0
|f(x)| = 0.
4
Demostracion. Si lımx→x0
f(x) = 0 entonces, por lo visto en la proposicion 1.8, tenemos que lımx→x0
|f(x)| =0. Recıprocamente, observe que
−|f(x)| ≤ f(x) ≤ |f(x)|, ∀x ∈ A.
Por el teorema del sandwich, se sigue que lımx→x0
f(x) = 0.
Proposicion 1.13. Sea A intervalo o union de intervalos, f, g : A→ R funciones definidas en A yx0 ∈ A. Si g es acotada en A y lım
x→x0f(x) = 0 entonces lım
x→x0f(x)g(x) = 0.
Demostracion. En efecto, como g es acotada en A, entonces existe M > 0 tal que |g(x)| ≤ M ,para todo x ∈ A. Multiplicando por |f(x)| y recordando que el valor absoluto es mayor o igualque cero, obtenemos
0 ≤ |f(x)g(x)| ≤M |f(x)|Aplicando el teorema del sandwich, concluimos que lım
x→x0|f(x)g(x)| = 0, y por lo visto en el
corolario 1.12, obtenemos lımx→x0
f(x)g(x) = 0.
1.3. Pautas para el calculo de lımitesA continuacion, daremos algunas pautas para el calculo de lımites de la forma
lımx→x0
f(x)
g(x)
cuando las formulas de f y g estan formadas por operaciones algebraicas de funciones elementales.
1. Evalue f(x0) y g(x0). Si ambos son numeros reales, y g(x0) 6= 0 entonces, por algebra delımites,
lımx→x0
f(x)
g(x)=f(x0)
g(x0).
2. Si f(x0) = g(x0) = 0 entonces intente factorizar un factor de la forma x − x0 del nu-merador y denominador. Otra tecnica que usualmente funciona, cuando la formula de g esdiferencia de dos raices, es “multiplicar por el conjugado”. La idea es que consiga eliminarde numerador y denominador el termino que hace cero ambos lımites.
3. El caso f(x0) 6= 0 y g(x) = 0 lo estudiaremos con detalle en la semana 2.
Ejercicio 1.14. Calcule, si existen, los siguientes lımites.
1. lımx→−2
5x+ ex+2
x2 + 1.
2. lımx→4
x2 − 2x− 8
x2 − 4x.
5
3. lımx→3
x2 − 9√3x− 3
.
4. lımx→−2
x3 + 8
x+ 2.
1.4. Lımites lateralesConsidere el ejercicio 1.4. En este caso el lımite no existe pues cuando x se acerca a x0 = 2, el
valor de f(x) puede acercarse a L1 = 3 o a L2 = 0, dependiendo de “como acerquemos” x a 2 enel eje x.
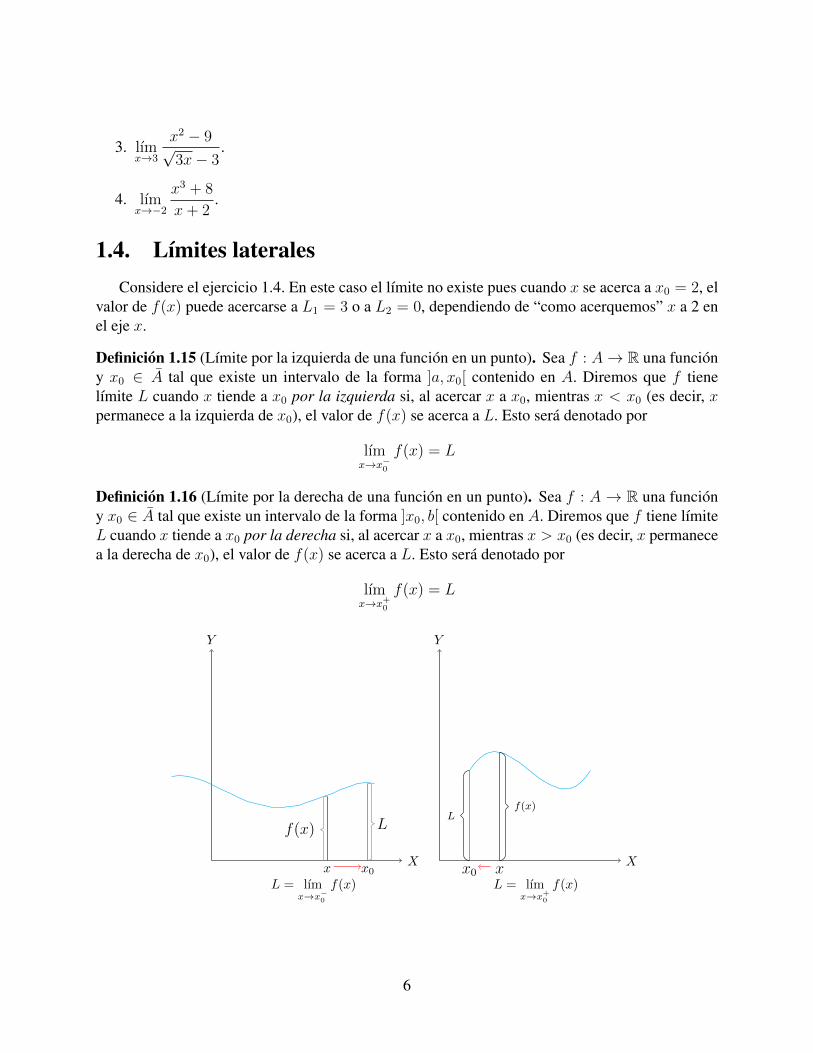
Definicion 1.15 (Lımite por la izquierda de una funcion en un punto). Sea f : A→ R una funciony x0 ∈ A tal que existe un intervalo de la forma ]a, x0[ contenido en A. Diremos que f tienelımite L cuando x tiende a x0 por la izquierda si, al acercar x a x0, mientras x < x0 (es decir, xpermanece a la izquierda de x0), el valor de f(x) se acerca a L. Esto sera denotado por
lımx→x−0
f(x) = L
Definicion 1.16 (Lımite por la derecha de una funcion en un punto). Sea f : A → R una funciony x0 ∈ A tal que existe un intervalo de la forma ]x0, b[ contenido en A. Diremos que f tiene lımiteL cuando x tiende a x0 por la derecha si, al acercar x a x0, mientras x > x0 (es decir, x permanecea la derecha de x0), el valor de f(x) se acerca a L. Esto sera denotado por
lımx→x+0
f(x) = L
x x0
Lf(x)
Y
X
L = lımx→x−
0
f(x)
X
Y
x0 x
Lf(x)
L = lımx→x+
0
f(x)
6

Teorema 1.17. Sean A =]a, b[\{x0}, donde x0 ∈]a, b[, f : A→ R y L ∈ R. Se tiene que existe ellımite de f cuando x tiende a x0 y L = lım
x→x0f(x), si y solo si, existen los lımites por la izquierda
y por la derecha de f cuando x tiende a x0 por la izquierda y por la derecha de x0, y
L = lımx→x+0
f(x) = lımx→x−0
f(x).
Observacion. El teorema anterior se aplica unicamente en el caso en que ambos lımites por izquier-da y por derecha puedan ser definidos (que no es lo mismo que decir que existan). Consideremos ellımite lım
x→0
√x = 0. Observe que para la funcion f : [0,+∞[→ R, f(x) =
√x, no se puede aplicar
la definicion de lımite por la izquierda para el punto x0 = 0; simplemente lımx→0
√x = 0 = lım
x→0+
√x,
y no hay ninguna contradiccion con el teorema anterior.
Observacion. Los teoremas de unicidad del lımite (proposicion 1.6), algebra de lımites (teore-ma 1.7) y sandwich (teorema 1.11) tambien son validos para lımites laterales. Del mismo modolos ejercicios 1.9 y 1.10, corolario 1.12, proposicion 1.13 y las pautas para el calculo de lımitesdadas anteriormente.
Ejemplo 1.18. Sea a ∈ R, y f : R \ {0} → R dada por
f(x) =
{2x+ 1, x < 0,x2 + a, x > 0.
Entonces, lımx→0−
f(x) = 1, lımx→0+
f(x) = a, de modo que para que exista el lımite lımx→0
f(x), es nece-
sario y suficiente que a = 1.
1.5. Lımites infinitos y asıntotas verticalesDefinicion 1.19 (Lımite infinito +∞ de una funcion en un punto). Sea A ⊂ R intervalo o unionde intervalos, f : A → R, y x0 ∈ A. Decimos que f tiene lımite +∞ en x0 (o cuando x tiende ax0) si, cuando x tiende a x0 en el eje x entonces f(x) crece indefinidamente. Denotamos entonces
lımx→x0
f(x) = +∞.
Graficamente
7

X
Y
y = f(x)
x x0 x
f(x)
→
−→
Definicion 1.20 (Lımite infinito−∞ de una funcion en un punto). SeaA ⊂ R intervalo o union deintervalos, f : A → R, y x0 ∈ A. Decimos que f tiene lımite −∞ en x0 (o cuando x tiende a x0)si, cuando x tiende a x0 en el eje x entonces f(x) decrece indefinidamente. Denotamos entonces
lımx→x0
f(x) = −∞.
Ejemplo 1.21. lımx→0
1
x2= +∞.
Observacion. Tambien pueden definirse lımites laterales en un punto, a ±∞. Esto se deja comoejercicio al estudiante.
Una asıntota es una recta a la cual la grafica de la funcion se “acerca indefinidamente”. Observela figura anterior: note que la grafica celeste se esta pegando a la recta roja con ecuacion x = x0.Esto significa que la recta vertical x = x0 es una asıntota vertical de y = f(x).
Definicion 1.22. Sea f : A→ R y x0 ∈ A. Si ocurre alguno de los lımites
lımx→x+0
f(x) = ±∞
olımx→x−0
f(x) = ±∞,
decimos que la recta x = x0 es una asıntota vertical de la grafica y = f(x) de f .
Ejemplo 1.23. La recta x = 1 es asıntota vertical de la funcion f : R \ {1} → R, f(x) = 2+x1−x . En
efecto pues
lımx→1+
f(x) = lımx→1+
2 + x
1− x= lım
x→1+
3
1− x− 1 = −∞.
8

Tambienlımx→1−
f(x) = lımx→1−
2 + x
1− x= lım
x→1−
3
1− x− 1 = +∞.
1.6. Pautas para el calculo de lımites infinitosProposicion 1.24. Sea I intervalo, sea f : I → R una funcion y x0 ∈ I . Si f(x) > 0 en I ylımx→x0
f(x) = 0, entonces
lımx→x0
1
f(x)= +∞.
Del mismo modo, tenemos para el caso −∞.
Corolario 1.25. Sea I intervalo, sea f : I → R una funcion y x0 ∈ I . Si f(x) < 0 en I ylımx→x0
f(x) = 0, entonces
lımx→x0
1
f(x)= −∞.
Supongamos que tenemos el lımite lımx→x0
f(x)
g(x), donde las formulas de f y g estan compuestas
por operaciones algebraicas de funciones elementales. Supongamos que tenemos el caso f(x0) =lımx→x0
f(x) 6= 0 y g(x0) = lımx→x0
g(x) = 0. Observe que por la proposicion y corolario anterio-
res, lımx→x0
1
g(x)= ±∞, dependiendo del signo de g “cerca” a x0. Luego, tenemos las siguientes
posibilidades
1. si f(x0) > 0 y g(x) > 0 “cerca” a x0, entonces lımx→x0
f(x)
g(x)= +∞;
2. si f(x0) > 0 y g(x) < 0 “cerca” a x0, entonces lımx→x0
f(x)
g(x)= −∞;
3. si f(x0) < 0 y g(x) > 0 “cerca” a x0, entonces lımx→x0
f(x)
g(x)= −∞;
4. si f(x0) < 0 y g(x) < 0 “cerca” a x0, entonces lımx→x0
f(x)
g(x)= +∞.
Esta pauta tambien se aplica cuando se consideran lımites laterales.
Observacion. Recuerde que ±∞ no son numeros, por lo tanto, las operaciones algebraicas denumeros reales (suma, resta, multiplicacion, division) no estan definidas para estos. Sin embargo,
9
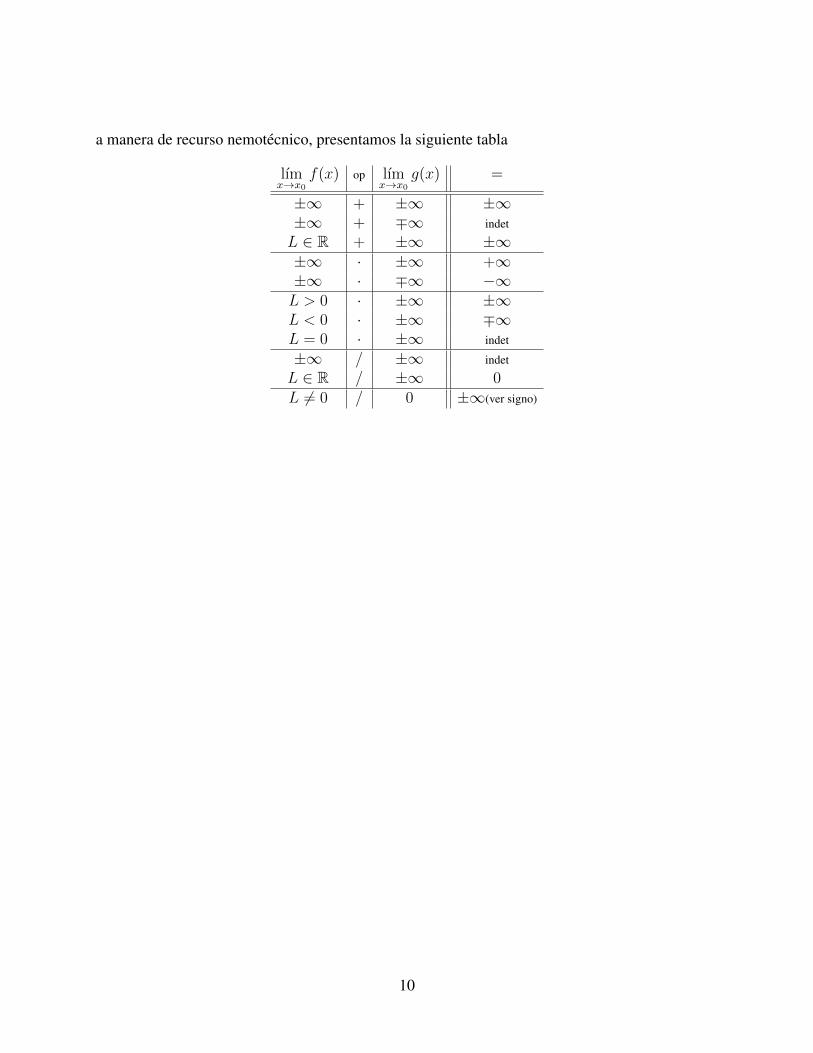
a manera de recurso nemotecnico, presentamos la siguiente tabla
lımx→x0
f(x) op lımx→x0
g(x) =
±∞ + ±∞ ±∞±∞ + ∓∞ indet
L ∈ R + ±∞ ±∞±∞ · ±∞ +∞±∞ · ∓∞ −∞L > 0 · ±∞ ±∞L < 0 · ±∞ ∓∞L = 0 · ±∞ indet
±∞ / ±∞ indet
L ∈ R / ±∞ 0L 6= 0 / 0 ±∞(ver signo)
10
SEMANA 2
L IMITES AL INFINITO. ASINTOTAS.CONTINUIDAD.
2.1. Lımites al infinitoDefinicion 2.1 (Lımite en +∞ de una funcion). Sea f : A → R tal que A contiene un intervalode la forma [a,+∞[, y L ∈ R. Decimos que f tiene lımite L en +∞ (o cuando x tiende al infinito+∞) si, cuando hacemos crecer x indefinidamente, el valor de f(x) se acerca a L. Denotamosentonces
L = lımx→+∞
f(x).
11
x
L = lımx→+∞
f(x)
L
X
Y
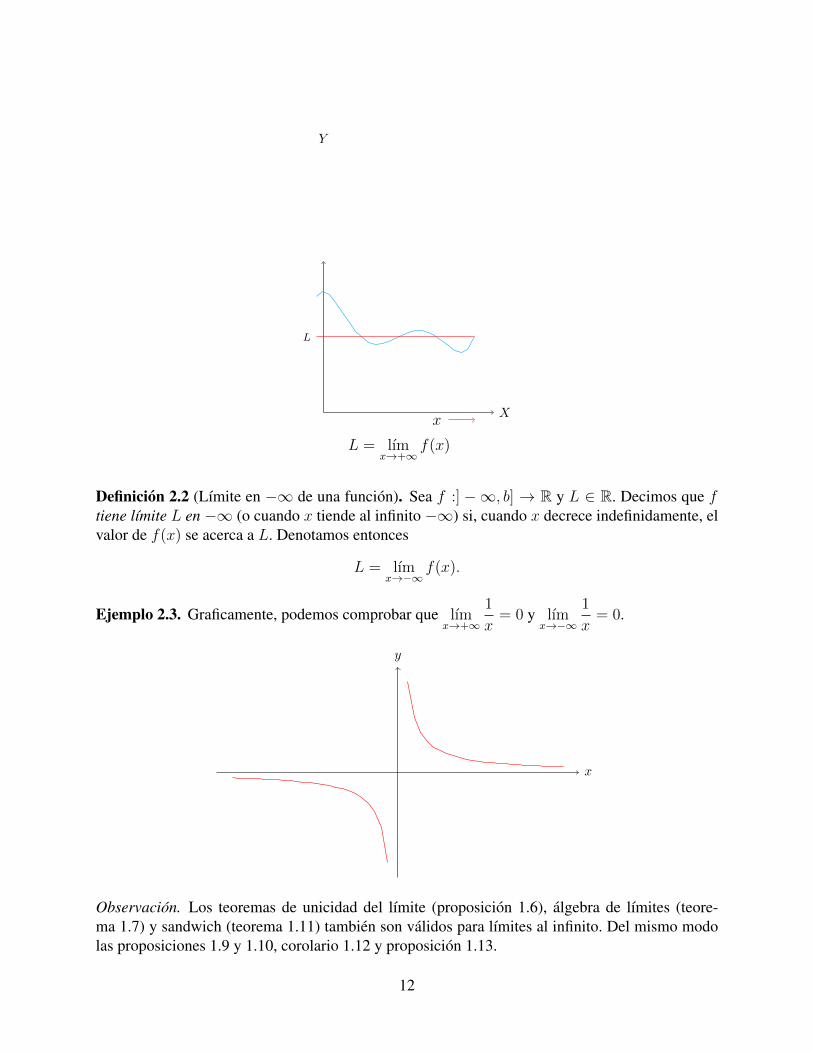
Definicion 2.2 (Lımite en −∞ de una funcion). Sea f :] −∞, b] → R y L ∈ R. Decimos que ftiene lımite L en −∞ (o cuando x tiende al infinito −∞) si, cuando x decrece indefinidamente, elvalor de f(x) se acerca a L. Denotamos entonces
L = lımx→−∞
f(x).
Ejemplo 2.3. Graficamente, podemos comprobar que lımx→+∞
1
x= 0 y lım
x→−∞
1
x= 0.
x
y
Observacion. Los teoremas de unicidad del lımite (proposicion 1.6), algebra de lımites (teore-ma 1.7) y sandwich (teorema 1.11) tambien son validos para lımites al infinito. Del mismo modolas proposiciones 1.9 y 1.10, corolario 1.12 y proposicion 1.13.
12

Podemos convertir un limite al infinito en un lımite lateral por medio de un cambio de variable.Similarmente, podemos transformar un lımite a −∞ en un lımite a +∞, y viceversa.
Proposicion 2.4. Si f : [a,+∞[→ R entonces lımx→+∞
f(x) = lımu→0+
f
(1
u
). Del mismo modo, si
f :]−∞, b]→ R entonces lımx→−∞
f(x) = lımu→0−
f
(1
u
).
Proposicion 2.5. Si f : [a,+∞[→ R entonces lımx→+∞
f(x) = lımx→−∞
f(−x). Del mismo modo, si
f :]−∞, b]→ R entonces lımx→−∞
f(x) = lımx→+∞
f(−x).
2.2. Asıntotas horizontales y oblıcuasDefinicion 2.6. Sea f : A→ R y b ∈ R. Si ocurre alguno de los lımites
lımx→+∞
f(x) = b
olım
x→−∞f(x) = b,
decimos que la recta y = b es una asıntota horizontal de la grafica y = f(x) de f .
Ejemplo 2.7. La recta y = −1 es asıntota horizontal de la grafica de la funcion f : R \ {1} → R,f(x) = 2+x
1−x . En efecto pues
lımx→+∞
f(x) = lımx→+∞
2 + x
1− x= lım
x→+∞
3
1− x− 1 = −1.
Tambienlım
x→−∞f(x) = lım
x→−∞
2 + x
1− x= lım
x→−∞
3
1− x− 1 = −1.
Luego el grafico de la funcion f(x) = 2+x1−x con sus respectivas asıntotas es:
13

x = 1 es asıntota vertical
y = −1 es asıntota horizontal
f(x) = 2+x1−x
Observacion. Recurso en lınea: asıntotas verticales y horizontales de una funcion (GeoGebra).
Definicion 2.8. Sea f : A→ R y m, b ∈ R. Si ocurre alguno de los lımites
lımx→+∞
f(x)− (mx+ b) = 0
olım
x→−∞f(x)− (mx+ b) = 0,
decimos que la recta y = mx+ b es una asıntota oblicua de la grafica y = f(x) de f .
Proposicion 2.9. Bajo las notaciones y condiciones de la definicion anterior, los parametros m y bde una asıntota oblicua a la grafica de y = f(x) pueden obtenerse por (segun sea el caso en ±∞)mediante las formulas
m = lımx→±∞
f(x)
x, b = lım
x→±∞f(x)−mx.
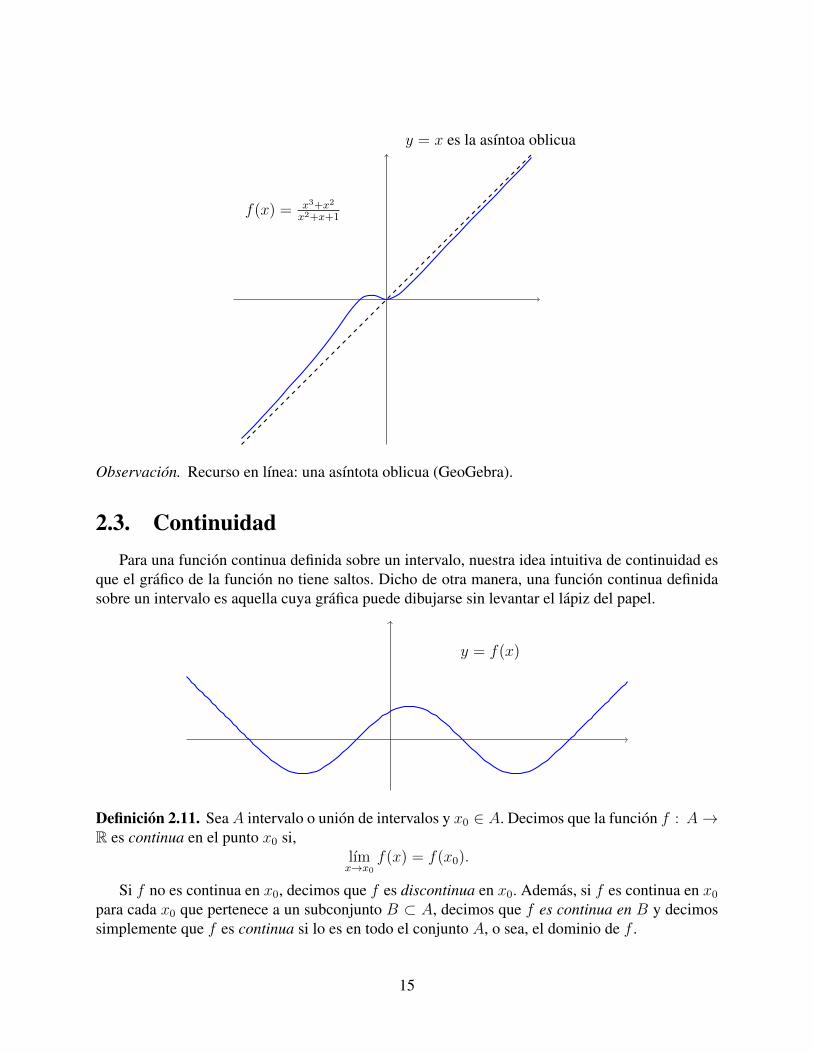
Ejemplo 2.10. La recta y = x es asıntota oblicua de la grafica de la funcion f : R → R, f(x) =x3+x2
x2+x+1. En efecto pues
lımx→±∞
x3+x2
x2+x+1
x= lım
x→±∞
x3 + x2
x(x2 + x+ 1)= lım
x→±∞
x3(1 + 1/x)
x3(1 + 1/x+ 1/x2)= lım
x→±∞
1 + 1/x
1 + 1/x+ 1/x2= 1
y
lımx→±∞
x3 + x2
x2 + x+ 1− x = lım
x→±∞
−xx2 + x+ 1
= lımx→±∞
−xx(x+ 1 + 1/x)
= lımx→±∞
−1
x+ 1 + 1/x= 0
14
f(x) = x3+x2
x2+x+1
y = x es la asıntoa oblicua
Observacion. Recurso en lınea: una asıntota oblicua (GeoGebra).
2.3. ContinuidadPara una funcion continua definida sobre un intervalo, nuestra idea intuitiva de continuidad es
que el grafico de la funcion no tiene saltos. Dicho de otra manera, una funcion continua definidasobre un intervalo es aquella cuya grafica puede dibujarse sin levantar el lapiz del papel.
y = f(x)
Definicion 2.11. SeaA intervalo o union de intervalos y x0 ∈ A. Decimos que la funcion f : A→R es continua en el punto x0 si,
lımx→x0
f(x) = f(x0).
Si f no es continua en x0, decimos que f es discontinua en x0. Ademas, si f es continua en x0
para cada x0 que pertenece a un subconjunto B ⊂ A, decimos que f es continua en B y decimossimplemente que f es continua si lo es en todo el conjunto A, o sea, el dominio de f .
15

Ejemplo 2.12. Sean A = R \ {2} y f(x) =x2 + 1
x− 2. Entonces f es continua en A. Observe que en
x = 2 la funcion no esta definida y que lımx→2+
f(x) = +∞ y lımx→2−
f(x) =−∞. Tambien, podemos
verificar que y = x+ 2 es una asıntota oblicua de f . El grafico aproximado de la funcion es:
x
y
f(x) = x2+1x−2
y = x+ 2 es asıntota oblicua.
x = 2 es asıntota vertical.
Ejemplos. Toda funcion elemental es continua. En particular:
1. Todo polinomio P : R→ R es una funcion continua.
2. Si f =P
Qes una funcion racional (cociente de polinomios), esta es continua en su dominio,
es decir el conjunto de numeros reales desprovisto del conjunto de valores de x ∈ R para loscuales Q(x) = 0.
3. La funcion logaritmo natural y la funcion exponencial son continuas en todo punto de sudominio.
Ejemplo 2.13. Sean A = [−2, 2], y f(x) =√
4− x2. El grafico de f es
x
y
f(x) =√
4− x2.
16

Desde que lımx→x0
f(x) = f(x0), tenemos que la funcion f es continua.
Teorema 2.14. Sea A ⊂ R, x0 ∈ A y f, g : A→ R continuas en x0. Entonces
1. Se tiene que f + g es continua en x0;
2. Se cumple que f · g es continua en x0;
3. Para cada λ ∈ R, λ · f es continua en x0;
4. Si g(x0) 6= 0,f
ges continua en x0.
Ejemplo 2.15. Usando el teorema anterior, las siguientes funciones son continuas en su dominio.
1. Polinomiales: p(x) = anxn + · · ·+ a1x+ a0.
2. Racionales: r(x) =p(x)
q(x).
3. Radicales: f(x) = n√x.
Proposicion 2.16. Sean A y B intervalos o union de intervalos, y sean g : B → R, f : A → Rcon f(A) ⊂ B, tales que f es continua en x0 ∈ A y g es continua en u0 = f(x0) ∈ B. Entonces,la composicion g ◦ f es continua en x0.
2.4. Tipos de discontinuidadDefinicion 2.17 (Discontinuidad removible). Sea A ⊂ R intervalo o union de intervalos, f : A→R y x0 ∈ A tal que f es discontinua en x0. Decimos que la discontinuidad de f en x0 es removiblesi lımx→x0
f(x) = L existe. En este caso L 6= f(x0), porque f es discontinua.
x
y
f(x0)
x0
L
17

Observacion. Si x0 es una discontinuidad removible de f , podemos definir una funcion g : A→ Rcontinua en x0 tal que g(x) = f(x) para todo x ∈ A, x 6= x0. La funcion g solo difiere de f enel punto x0, esta funcion se obtiene “redefiniendo” esta funcion en dicho punto. Visto el criterioanterior de continuidad, los valores de la funcion g buscada se hallan de la siguiente manera:
g(x) =
{f(x), x 6= x0,
lımx→x0
f(x), x = x0.
Ejemplo 2.18. La funcion f : R→ R definida por f(x) =x2 − 1
x− 1, para x 6= 1 y f(1) = 3, posee
una discontinuidad removible en x0 = 1. En efecto, pues
lımx→1
x2 − 1
x− 1= lım
x→1x+ 1 = 2.
Definicion 2.19 (Discontinuidad no removible). Sea f : A→ R, f discontinua en x0 ∈ A. Se diceque f tiene una discontinuidad no removible en x0, si lım
x→x0f(x) no existe.
Observacion. Cabe destacar que si el lımite no existe es porque los lımites laterales difieren, soninfinitos o no existen.
x
y
x0x
y
x0
Ejemplo 2.20. La funcion f : R → R definida por f(x) =1
x+ 3, para x 6= −3, y f(−3) = 0.
Podemos ver que
lımx→−3+
f(x) = lımx→−3+
1
x+ 3= +∞
lo cual nos dice que la funcion f tiene una discontinuidad no removible en x0 = −3.
Ejemplo 2.21. La funcion f : R → R definida por f(0) = −5 y f(x) = 12
+ 4x, si x ∈ R \ {0}.Podemos ver que
lımx→0+
f(x) = lımx→0+
1
2+ 4x =
1
2y lım
x→0−f(x) = lım
x→0−
1
2+ 4x =
1
2.
Desde que f(0) = −5, tenemos que la funcion f tiene una discontinuidad removible en x0 = 0.
18

SEMANA 3
DERIVADAS
3.1. La derivada. Definicion y ejemplosDefinicion 3.1. Sea A ⊂ R un intervalo o union de intervalos, x0 ∈ A y f : A→ R. La derivadade f en x0 es el lımite
f ′(x0) = lımx→x0
f(x)− f(x0)
x− x0
= lımh→0
f(x0 + h)− f(x0)
h
en caso exista.
La derivada puede interpretarse geometricamente como la pendiente de la recta tangente algrafico de la funcion f en el punto (x0, f(x0)) (ver la figura 3.1).
x
y L : y − f(x0) = f ′(x0)(x− x0).
x0
f(x0)
x
f(x)f(x)− f(x0)
x− x0
Figura 3.1: La derivada como recta tangente.
19

Ejemplo 3.2. Sea f : R → R, definido por f(x) = c, donde c es constante. Luego tenemos que,para todo x0 ∈ R,
f ′(x0) = lımx→x0
f(x)− f(x0)
x− x0
= lımx→x0
c− cx− x0
= lımx→x0
0 = 0.
Como podemos ver la derivada en cualquier punto del dominio de una funcion constante es siemprecero.
Ejemplo 3.3. Sea f : R→ R, definido por f(x) = x+ 5. Tenemos que para todo x0 ∈ R
f ′(x0) = lımx→x0
f(x)− f(x0)
x− x0
= lımx→x0
x+ 5− (x0 + 5)
x− x0
= lımx→x0
1 = 1.
Definicion 3.4. Considerando los puntos x0 ∈ A para los cuales f ′(x0) existe, formamos un sub-conjunto B ⊂ A y una funcion f ′ : B → R que asocia, a cada elemento x ∈ B, su derivada f ′(x).La funcion f ′ obtenida es llamada la funcion derivada de f .
Ejemplo 3.5. Para f : R→ R, f(x) = x2, para todo x0 ∈ R
f ′(x0) = lımx→x0
f(x)− f(x0)
x− x0
= lımx→x0
x2 − x20
x− x0
= lımx→x0
x+ x0 = 2x0.
La igualdad f ′(x) = 2x se escribe, por abuso de notacion, como
(x2)′ = 2x.
Esta notacion sera frecuente para aplicaciones usuales.
Notaciones (aquı y = f(x)):
f ′(x),df(x)
dx, y′,
dy
dx.
Teorema 3.6. Sea A conjunto abierto, x0 ∈ A y f : A → R. Si f es derivable en x0, entonces fes continua en x0.
Demostracion. La prueba se basa en el calculo del siguiente lımite, sabiendo que x0 ∈ A:
lımx→x0
f(x)− f(x0) = lımx→x0
f(x)− f(x0)
x− x0
(x− x0) = f ′(x0) lımx→x0
(x− x0) = 0,
y esto implica que lımx→x0
f(x) = f(x0).
El recıproco del teorema anterior es falso. Por ejemplo, considere f : R → R, f(x) = |x|.Ciertamente f es continua, en particular, es continua en x = 0. Sin embargo, no existe f ′(0). Enefecto, para analizar la existencia de la derivada del valor absoluto en x = 0, debemos estudiar ellımite
lımh→0
|0 + h| − |0|h
.
20

Para esto, calculemos el lımite lateral derecho:
lımh→0+
|h| − |0|h
= lımh→0+
h
h= 1,
donde notamos que, si h tiende a 0 por la derecha entonces |h| = h > 0. Por otro lado,
lımh→0−
|h| − |0|h
= lımh→0+
−hh
= −1,
pues en este caso |h| = −h < 0. Como los lımites laterales son distintos, concluimos que no existeel lımite.
Ejemplo 3.7. Verifiquemos que la funcion logaritmo ln : ]0,+∞[→ R es derivable. Comenzamoscalculando su derivada en x0 = 1:
ln′(1) = lımh→0
ln(1 + h)− ln(1)
h= lım
h→0
1
hln(1 + h) = lım
h→0ln((1 + h)1/h
)Como el logaritmo natural el continuo, el lımite anterior existira, si existe el lımite lım
h→0(1 + h)1/h.
Este lımite ya aparecio anteriormente, y su valor es e. Ası, tenemos que ln′(1) = ln(e) = 1.Si ahora x > 0 es cualquiera, tenemos
ln′(x) = lımh→0
ln(x+ h)− ln(x)
h= lım
h→0
1
hln(
1 +h
x
),
= lımh→0
1
x
x
hln(
1 +h
x
)=
1
xlımu→0
1
uln(1 + u
),
=1
xlımu→0
ln(1 + u
)− ln(1)
u=
1
xln′(1) =
1
x,
gracias al cambio u = h/x (u→ 0 cuando h→ 0) y observando que ln(1) = 0. Por lo tanto, parax > 0
ln′(x) =1
x.
La formula de la derivada de la funcion exponencial ex, sera dada en la clase 7, como una
aplicacion de la regla de la cadena. En esa clase, probaremos qued
dxex = ex.
3.2. Algebra de derivadasTeorema 3.8. Sea A ⊂ R conjunto abierto, x0 ∈ A y f, g : A→ R derivables en x0. Entonces:
1. f ± g es derivable en x0 y (f ± g)′(x0) = f ′(x0)± g′(x0);
2. si c ∈ R, entonces cf es derivable en x0 y (cf)′(x0) = c · f ′(x0);
21

3. f · g es derivable en x0 y
(f · g)′(x0) = f ′(x0) · g(x0) + f(x0) · g′(x0);
4. si g(x0) 6= 0, f/g es derivable en x0 y(f
g
)′(x0) =
f ′(x0)g(x0)− f(x0)g′(x0)
g(x0)2.
Demostracion. Probemos el ıtem 1, para el caso de la suma:
(f + g)′(x0) = lımx→x0
(f + g)(x)− (f + g)(x0)
x− x0
,
= lımx→x0
f(x) + g(x)− f(x0) + g(x0)
x− x0
,
= lımx→x0
f(x)− f(x0)
x− x0
+ lımx→x0
g(x)− g(x0)
x− x0
,
= f ′(x0) + g′(x0).
El ıtem 2 es analogo. En el caso del ıtem 3, sumamos y restamos el termino f(x0)g(x) de maneraconveniente, y observando que g es continua en x0, tenemos
(f · g)′(x0) = lımx→x0
(f · g)(x)− (f · g)(x0)
x− x0
,
= lımx→x0
f(x)g(x)− f(x0)g(x) + f(x0)g(x)− f(x0)g(x0)
x− x0
,
= lımx→x0
f(x)− f(x0)
x− x0
lımx→x0
g(x) + f(x0) lımx→x0
g(x)− g(x0)
x− x0
,
= f ′(x0)g(x0) + f(x0)g′(x0).
El ıtem 4 es analogo.
Ejemplo 3.9. La funcion f(x) = x3 + 3x2 + 5x+ 1 es la suma de funciones derivables, ası por elTeorema 3.8 parte 1. tenemos que f es derivable y
f ′(x) = 3x2 + 6x+ 5.
En la siguiente tabla, se indica las reglas de correspondencia de una funcion f : A → R y desu derivada f ′.
22
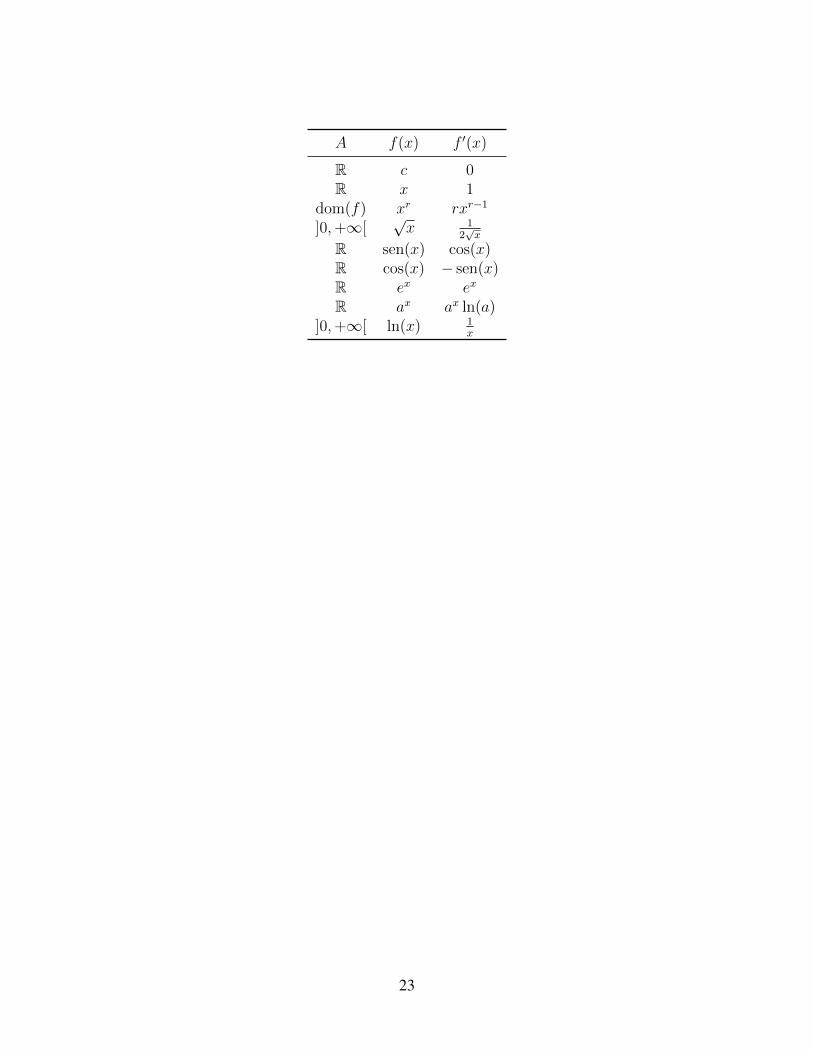
A f(x) f ′(x)
R c 0R x 1
dom(f) xr rxr−1
]0,+∞[√x 1
2√x
R sen(x) cos(x)R cos(x) − sen(x)R ex ex
R ax ax ln(a)]0,+∞[ ln(x) 1
x
23

SEMANA 4
TOPICOS DE DERIVACION
4.1. Regla de la cadenaProposicion 4.1 (Regla de la cadena). Sean A y B conjuntos abiertos, y sean f : A → R yg : B → R funciones para las cuales la composicion g ◦f esta bien definida, es decir, que cumplenf(A) ⊂ B. Supongamos que f es derivable en x0 ∈ A y g es derivable en u0 = f(x0) ∈ B.Entonces, la composicion g ◦ f es derivable en x0, y
(g ◦ f)′(x0) = g′(f(x0)
)· f ′(x0).
Si escribimos y = g(f(x)
)= g(u) con u = f(x), entonces la regla de la cadena se escribe tambien
por
dy
dx=dy
du· dudx.
Ejemplo 4.2. La derivada dey = f(x) = ln(x2 + 1)
esy′ = f ′(x) =
1
x2 + 1(2x) =
2x
x2 + 1.
Formalmente: sea g : R→ R, g(x) = ln(x) y h : R→ R, h(x) = x2 + 1. Entonces f = g ◦ h, esdecir, f(x) = g(h(x)) = ln(h(x)) = ln(x2 + 1). Observe que g′(x) = 1/x y h′(x) = 2x. Luego,por la regla de la cadena,
f ′(x) = g′(h(x)) · h′(x),
=1
h(x)· h′(x),
=1
x2 + 1· (2x).
24

La regla de la cadena se puede componer varias veces: si
y = h(g(f(x)︸︷︷︸u
)︸ ︷︷ ︸v=k(x)
)= h
(g(u)
)= h(v),
entoncesdy
dx=dy
dv· dvdx
=dy
dv· dvdu· dudx
o
y′ = h′ (k(x)) · k′(x),
= h′ (k(x)) · g′ (f(x)) · f ′(x),
= h′ (g (f(x))) · g′ (f(x)) · f ′(x).
Ejemplo 4.3. La derivada de y =√[
f(x2)]5
+[g(x)
]4 es
y′ =1
2√[
f(x2)]5
+[g(x)
]4([f(x2)]5
+[g(x)
]4)′,
=1
2√[
f(x2)]5
+[g(x)
]4(
5[f(x2)
]4(f(x2)
)′+ 4[g(x)
]3g′(x)
),
=1
2√[
f(x2)]5
+[g(x)
]4(
5[f(x2)
]4f ′(x2)(x2)′ + 4
[g(x)
]3g′(x)
),
=1
2√[
f(x2)]5
+[g(x)
]4(
5[f(x2)
]4f ′(x2)(2x) + 4
[g(x)]3g′(x)
).
Corolario 4.4. Sea A un conjunto abierto y sea f : A → R una funcion invertible (es decir,inyectiva). SeaB = f(A) y consideremos g = f−1 : B → R, la funcion inversa de f . Supongamosademas que f es derivable en x0 ∈ A. Si g es derivable en y0 = f(x0) ∈ B entonces
g′(y0) = (f−1)′(y0) =1
f ′(x0)=
1
f ′(g(y0)).
La prueba se sigue una vez que recordamos que f(g(y)) = f(f−1(y)) = y, por definicion defuncion inversa, y aplicando la regla de la cadena a esta igualdad. Otra manera de escribir elcorolario 4.4 es
dx
dy=
1
dy/dx.
Ejemplos.
25

1. Sabemos, por lo visto en el ejemplo 3.7, que ln′(x) =1
x, cuando x > 0. Dado que la funcion
inversa del logaritmo natural es la funcion exponencial ex, podemos calcular su derivadamediante el corolario anterior. En efecto, para todo x ∈ R,
ln(ex) = x.
Derivando a ambos lados la expresion anterior, por la regla de la cadena, tenemos
1 = x′ = ln′(ex) · (ex)′ = 1
ex(ex)′.
Es decir, (ex)′ = ex, para todo x ∈ R.
2. Si y = tan(x) entonces x = arctan(y). Recuerde quedy
dx= sec(x)2 = 1 + tan(x)2. Luego
dx
dy=
1
1 + tan(x)2=
1
1 + tan(arctan(y))2=
1
1 + y2.
4.2. Derivacion logarıtmicaRecordemos que la funcion logaritmo natural ln : ]0,+∞[→ R es una funcion derivable para
todo x > 0 y que cumpled
dxln(x) =
1
x.
Ademas, si f : A → R es una funcion derivable, la composicion de ln con f esta bien definidasiempre y cuando f(x) > 0, para todo x ∈ A. En este caso, por la regla de la cadena y la derivadadel logaritmo tenemos
d
dxln(f(x)) = ln′(f(x))f ′(x) =
1
f(x)f ′(x).
Ası, para una funcion f : A →]0,+∞[, se llama derivada logarıtmica de f , a la derivada de lafuncion logaritmo de f , es decir,
d
dxln(f(x)) =
f ′(x)
f(x),
o, considerando y = f(x),d
dxln(y) =
y′
y.
A menudo, podemos usar la derivada logarıtmica de una funcion para simplificar el calculo de suderivada.
26

Ejemplo 4.5. Sean f, g : A →]0,+∞[ funciones derivables. Podemos deducir la formula de laderivada del producto de la siguiente manera: por propiedad del logaritmo, tenemos
ln((f · g)(x)
)= ln
(f(x) · g(x)
)= ln(f(x)) + ln(g(x)).
Derivando respecto de x a ambos lados,
(f · g)′(x)
f(x)g(x)=f ′(x)
f(x)+g′(x)
g(x).
De donde obtenemos, despejando (f · g)′(x)
(f · g)′(x) = f(x)g(x)
(f ′(x)
f(x)+g′(x)
g(x)
)= f ′(x)g(x) + f(x)g′(x).
Ejemplo 4.6. Si f, g : A →]0,+∞[ son funciones derivables, determinar una expresion para elcalculo de la derivada de h(x) = f(x)ag(x)b, donde a y b son constantes reales.
Solucion. Tomamos el logaritmo natural a las expresiones, obteniendose ası
ln(h(x)
)= a ln
(f(x)
)+ b ln
(g(x)
),
y luego derivamos,h′(x)
h(x)= a · f
′(x)
f(x)+ b · g
′(x)
g(x),
de donde
h′(x) = h(x) ·(a · f
′(x)
f(x)+ b · g
′(x)
g(x)
)= f(x)ag(x)b ·
(a · f
′(x)
f(x)+ b · g
′(x)
g(x)
).
Observacion. Para obtener la derivada de y = f(x) mediante el metodo de derivacion logarıtmicadebemos seguir los siguientes pasos:
1. Tomar logaritmos naturales en ambos miembros de la expresion a derivar.
2. Utilizar las propiedades de los logaritmos para reducir los productos y potencias presentes.
3. Derivar ambos miembros respecto de la variable independiente.
4. Despejar la derivada y′.
5. Reemplazar la expresion de y y simplificar la expresion resultante.
Ejemplo 4.7. Derivar la siguiente funcion y = f (x) =x
12 (x+ 1)5
10 3√x2 − 3
.
27

Solucion. Tomamos logaritmos en ambos miembros de la expresion
ln y = ln
(x
12 (x+ 1)5
10 3√x2 − 3
).
Utilizamos las propiedades de logaritmo:
ln y = ln(x
12 (x+ 1)5
)− ln
(10(x2 − 3)1/3
),
=1
2ln(x) + 5 ln(x+ 1)− ln 10− 1
3ln(x2 − 3).
Derivamos ambos lados de la igualdad:
y′
y=
1
2x+
5
x+ 1− 1
3· 2x
x2 − 3.
Despejamos la derivada:
y′ = y
(1
2x+
5
x+ 1− 2x
3(x2 − 3)
).
Reemplazamos el valor de y:
y′ =
(x
12 (x+ 1)5
10 3√x2 − 3
)(1
2x+
5
x+ 1− 2x
3(x2 − 3)
).
Ejercicio 4.8. Derivar las siguientes funciones:
1. y =(x+ 1)2
(x+ 2)3(x− 1)4.
2. y =
√x− 1
3
√(x+ 2)2
√(x− 3)3
.
4.3. Derivadas de orden superiorSi f es una funcion derivable, f ′ tambien es una funcion y puede tener derivada que se repre-
senta como f ′′ y se llama segunda derivada de f . Tambien se utilizan las notaciones:
d
dx
(dy
dx
)=d2y
dx2= f ′′(x).
A su vez, si f ′′ es derivable, se obtiene la tercera derivada; y ası sucesivamente. Si la enesimaderivada existe, se representa como f (n) y se utilizan las notaciones:
d
dx
(dn−1y
d xn−1
)=dny
dxn= f (n) (x) .
28

Ejemplo 4.9. Determinar la segunda derivada de f (x) = x3 + 2x+ xex.
Solucion. Primero obtenemos la primera derivada de f :
f ′(x) = 3x2 + 2 + xex + ex,
luegof ′′(x) = 6x+ (xex + ex) + ex = 6x+ xex + 2ex.
Ejemplo 4.10. Determinar la enesima derivada de f(x) =1
x+ 2.
Solucion. Podemos reescribir f como funcion potencia f(x) = (x + 2)−1. Dado que el dominiode f es A = R \ {−2}, para todo elemento x ∈ A :
f ′(x) = (−1)(x+ 2)−2
f ′′(x) = (−1)(−2)(x+ 2)−3
f ′′′(x) = (−1)(−2)(−3)(x+ 2)−4
...
f (n)(x) = (−1)nn! (x+ 2)−(n+1) .
Ejemplo 4.11. Determinard2y
dx2en cada caso:
1. y = 3√x3 + a3, donde a es constante.
2. y = (3x− 7)6(x+ 1)4.
3. y = xn ln(x).
29
SEMANA 5
LA REGLA DE L’HOPITAL. DERIVADA DE
FUNCIONES IMPLICITAS
5.1. La regla de L’Hopital
En ocasiones nos vemos en la necesidad de evaluar un lımite de la forma lımx→x0
f(x)
g(x), donde
lımx→x0
f(x) = lımx→x0
g(x) = 0. Usualmente nos referimos a esta situacion como una forma indetermi-
nada “0
0”. Cuando las funciones son derivables alrededor del punto x0 podremos usar el siguiente
teorema.
Teorema 5.1 (Regla de L’Hopital). Sean f y g definidas en un intervalo abierto que contiene x0 yderivables en dicho intervalo excepto posiblemente en x0. Supongamos que
lımx→x0
f(x) = lımx→x0
g(x) = 0
y que tanto g(x) como g′(x) son diferentes de cero, para todo x 6= x0. Si lımx→x0
f ′(x)
g′(x)= L (donde
L puede ser un numero real o ±∞) entonces
lımx→x0
f(x)
g(x)= lım
x→x0
f ′(x)
g′(x)= L.
La prueba se sigue de generalizar adecuadamente el siguiente calculo de lımites
lımx→x0
f(x)
g(x)= lım
x→x0
f(x)− f(x0)
g(x)− g(x0)= lım
x→x0
f(x)− f(x0)
x− x0
· x− x0
g(x)− g(x0)=f ′(x0)
g′(x0).
Ejemplos.
30

1. lımx→0
x2
ex − 1= lım
x→0
2x
ex=
2 · 01
= 0,
2. lımx→0
2x2 − xx2 + 4x
= lımx→0
4x− 1
2x+ 4= −1
4.
Observacion. Un error comun es aplicar la Regla de L’Hopital a una expresion que no es indeter-
minada. Por ejemplo, es posible evaluar el lımite lımx→1
2x2 − xx
= 1 directamente, porque la funciones continua en 1. Sin embargo, si aplicamos la Regla de L’Hopital obtenemos
lımx→1
2x2 − xx
= lımx→1
4x− 1
1= 3.
Este ultimo calculo es incorrecto, porque en este caso no se tiene una forma indeterminada 0/0.
La Regla de L’Hopital se puede generalizar en dos sentidos. Primero, podemos reemplazar x0
por ±∞. Segundo, podemos considerar tambien las formas indeterminadas ±∞/±∞.
Ejemplos.
1. lımx→+∞
(1− 1
x
) 13 − 1
− 1x
= lımx→+∞
13
(1− 1
x
)− 23 1x2
1x2
=1
3.
2. lımx→0+
(1/x)
lnx= lım
x→0+
−1/x2
1/x= lım
x→0+−1
x= −∞.
3. lımx→−∞
3x2 + x− 1
x2 + 1= lım
x→−∞
6x+ 1
2x= lım
x→−∞
6
2= 3.
5.2. Derivacion implıcitaConsideremos las siguientes tres ecuaciones:
3x2 + 5y = −1,
x2 + y2 = 1,
ln(x+ y)− 5x+ y3 + y = 0.
Cada una de estas ecuaciones expresa una dependencia de la variable y respecto de la variable x.Por ejemplo, para la ecuacion 3x2 + 5y = −1, tal dependencia puede ser expresada explıcitamente
mediante y =−1 + 3x2
5, es decir, una ecuacion de la forma y = f(x). En el caso de la ecuacion
x2 + y2 = 1, aunque es posible obtener una dependencia explıcita (por ejemplo y =√
1− x2) taldependencia no es unica (podrıamos escoger tambien y = −
√1− x2) y no expresa por completo
la dependencia entre x e y. Por ultimo, en el caso de la ecuacion ln(x+ y)− 5x+ y3 + y = 0, noes posible obtener una ecuacion explıcita de la forma y = f(x).
31

Sin embargo, esto no nos impide obtener la derivada de tal dependencia. Una ecuacion implıcitaentre las variables x e y es una ecuacion de la forma
F (x, y) = 0.
Por ejemplo, para las ecuaciones dadas inicialmente, tenemos F (x, y) = 3x2 + 5y + 1, F (x, y) =x2 + y2 − 1 y F (x, y) = ln(x+ y)− 5x+ y3 + y, respectivamente. Cuando no es posible dar a laecuacion F (x, y) = 0 la forma y = f(x) para derivarla de la manera usual, aun es posible calculardy
dxmediante derivacion implıcita. La derivacion implıcita consiste en derivar ambos lados de la
ecuacion con respecto a x y despues resolver la ecuacion resultante para y′.A continuacion se dan algunos ejemplos de como aplicar el metodo.
Ejemplo 5.2. Consideremos la ecuacion x2 + y2 = 1. Hallardy
dxde manera implıcita.
Solucion. Como ya vimos, en este caso tenemos 0 = x2 + y2 − 1 = F (x, y). Luego, derivandoambos lados de la ecuacion respecto de x,
0 =d
dx0 =
d
dx(x2 + y2 − 1) = 2x+ 2y
dy
dx.
Tenemos ası entoncesdy
dx= −2x
2y= −x
y.
Ejemplo 5.3. Derivar implıcitamente las siguientes funciones:
1.d
dx(y4) =
d
dy(y4)
dy
dx= 4y3y′.
2.d
dx(ln y) =
d
dy(ln y)
dy
dx=
1
yy′ =
y′
y.
3.d
dx(x2 + y) = 2x+
d
dy(y)
dy
dx= 2x+ y′.
4.d
dx(x5y2) = 5x4y2 + x5 d
dx(y2) = 5x4y2 + x5 d
dy(y2)
dy
dx= 5x4y2 + 2x5y y′.
Ejemplo 5.4. Derivar implıcitamente xy2 + y3 = x2y.
32

Solucion. Derivando con respecto a x se obtiene
d
dx
(xy2 + y3
)=
d
dx(x2y),
d
dx
(xy2)
+d
dx
(y3)
=d
dx(x2y),((
d
dxx
)y2 + x
(d
dxy2
))+
d
dx
(y3)
=
(d
dxx2
)y + x2
(d
dxy
),
y2 + x
(2ydy
dx
)+ 3y2 dy
dx= 2xy + x2 dy
dx,(
2xy + 3y2 − x2) dydx
= 2xy − y2,
dy
dx=
2xy − y2
3y2 + 2xy − x2.
Ejemplo 5.5. Dada la ecuacion ln(x+ y) = yex, calcular dydx
.
Solucion. Al diferenciar implıcitamente con respecto a x se obtiene
d
dxln(x+ y) =
d
dx(yex) ,
1
x+ y
(1 +
dy
dx
)= y
d
dxex +
dy
dxex,
1
x+ y
(1 +
dy
dx
)= yex + ex
dy
dx,(
1
x+ y− ex
)dy
dx= yex − 1
x+ y,
dy
dx=
(x+ y)yex − 1
1− (x+ y)ex.
Ejemplo 5.6. Determinardy
dxsi, para alguna constante a, y = f (x) esta definida implıcitamente
por la ecuacion ax6 + 2x3y − xy7 = 100.
Solucion. Al derivar implıcitamente con respecto a x se obtiene
6ax5 +(6x2y + 2x3y′
)−(y7 + 7xy6y′
)= 0,(
2x3 − 7xy6)y′ = y7 − 6ax5 − 6x2y,
y′ =y7 − 6ax5 − 6x2y
2x3 − 7xy6.
Ejemplo 5.7. Mostrar que una funcion y = y(x) tal que
xy − ln(y) = 1,
33
satisface la relaciony2 + (xy − 1)
dy
dx= 0.
Solucion. En efecto, derivando implıcitamente respecto de x, obtenemos:
y + xy′ − y′
y= 0.
Multiplicando la expresion anterior por y, y reagrupando, tenemos
y2 + (xy − 1)y′ = 0.
5.3. Razon de cambio
Variacion o incrementoEn adelante, consideraremos funciones definidas sobre intervalos de la recta y la letra I deno-
tara a un intervalo cualquiera.
Definicion 5.8. Sea f : I → R con x0, x ∈ I , y = f(x), la variacion de x es
∆x = x− x0.
La variacion de la funcion f entre x0 y x, tambien llamada variacion de y, es
∆y = y − y0 = f(x)− f(x0).
Ejemplo 5.9. Suponga que el costo total, en dolares, de fabricar q unidades de cierto artıculo es
C(q) = 3q2 + 5q + 10.
Si el nivel actual de produccion es de 40 unidades, calcule la variacion del costo si se producen 41unidades.
Solucion. Vemos que q = 40 y ∆q = 1. Entonces, la variacion del costo entre 40 y 41 unidades es
∆C = C(q + ∆q)− C(q) = C(41)− C(40) = 5258− 5010 = 248.
Ejemplo 5.10. La funcion de ingreso de la empresa de cosmeticos ABC esta determinada porI(q) = q2 + 3q millones de soles, donde q esta dada en miles de unidades. Si actualmente se estanvendiendo 25 000 unidades ¿Cual sera la variacion en el ingreso cuando las ventas
1. aumenten en 5 000 unidades, y
2. disminuyan en 3 000 unidades?
34

Solucion. Como en la funcion de ingreso, la variable q esta en miles de unidades, entonces vender25 000 unidades se debe interpretar como q0 = 25. De la misma manera, un aumento de las ventasde 5 000 unidades se interpreta como ∆q = 5 y una disminucion de las ventas en 3 000 unidadesse interpreta como ∆q = −3.
Primero determinaremos la variacion del ingreso I entre q0 = 25 y q = q0 +∆q = 25+5 = 30.En este caso:
∆I = I(30)− I(25),
= (302 + 3 · 30)− (252 + 3 · 25),
= +290.
Es decir, cuando las ventas varien de 25 000 a 30 000 unidades, el ingreso de la empresa ABCaumentara en 290 millones de soles.
Ahora determinaremos la variacion del ingreso I entre q0 = 25 y q = q0 + ∆q = 25− 3 = 22.En este caso:
∆I = I(22)− I(25),
= (222 + 3 · 22)− (252 + 3 · 25),
= −150.
Es decir, cuando las ventas varien de 25 000 a 22 000 unidades, el ingreso de la empresa ABCdisminuira en 150 millones de soles.
Razon de cambio promedio e instantaneaDefinicion 5.11. Sea f : I → R y sean x0, x ∈ I . La razon de cambio promedio (r.c.p.) de f entrex0 y x es el numero
r.c.p. f =∆y
∆x=f(x)− f(x0)
x− x0
.
Definicion 5.12. Sea f : I → R, diferenciable en x0 ∈ I . La razon de cambio instantanea (r.c.i.)de f en el punto x0, es el lımite
r.c.i. f = f ′(x0) = lımx→x0
f(x)− f(x0)
x− x0
= lım∆x→0
f(x0 + ∆x)− f(x0)
∆x.
La razon de cambio promedio de f se interpreta geometricamente como la pendiente de la rectasecante que pasa por los puntos (x0, f(x0)) y (x, f(x)), y la razon de cambio instantanea de f seinterpreta geometricamente como la pendiente de la recta tangente a la grafica de f en el punto(x0, f(x0)). En este contexto podemos dar la siguiente definicion.
Definicion 5.13. Con las notaciones anteriores, la razon de cambio relativo (r.c.r.) de f en x0 es
r.c.r. f =f ′(x0)
f(x0).
35

Podemos interpretar la razon de cambio relativo de f como una proporcion que mide como esla razon de cambio instantanea de una funcion f en el punto x0 con respecto al valor de la funcionf en dicho punto x0.
Finalmente, tenemos la siguiente definicion que expresa lo mismo que la razon de cambiorelativo, pero en foma porcentual (recordar que 100 % = 1).
Definicion 5.14. La razon de cambio porcentual (r.c. %.) de f en x0 es
r.c.% f =f ′(x0)
f(x0)× 100 %.
Ejemplo 5.15. La utilidad U , en dolares, que un fabricante artesanal de juguetes obtiene con laventa de q unidades de su producto esta dada por
U (q) = 10q − 0, 01q2.
Determine y explique el significado de la razon de cambio promedio de la utilidad, en los siguientescasos:
1. la venta aumenta de 400 a 450 unidades,
2. la venta aumenta de 500 a 600 unidades.
Ademas, obtenga las razones de cambio instantanea, relativa y porcentual cuando se vendan 400unidades.
Solucion. Para un aumento de las ventas de 400 a 450 unidades, tenemos que q0 = 400 (ventainicial) y ∆q = 450− 400. En este caso ∆U = U(450)− U(400) y por tanto
r.c.p. U =∆U
∆q=U(450)− U(400)
450− 400,
=[10(450)− 0.01(450)2]− [10(400)− 0.01(400)2]
50,
=75
50= +1.5
$
unidad.
Ası, por cada aumento de una unidad en las ventas, entre las 400 y 450 unidades, la utilidad au-mentara aproximadamente en $1.5.
Por otro lado, para un aumento de las ventas de 500 a 600 unidades, tenemos q0 = 500,∆U = 100 y por lo tanto,
r.c.p. U =∆U
∆q=U(600)− U(500)
600− 500,
=[10(600)− 0.01(600)2]− [10(500)− 0.01(500)2]
100,
= −100
100= −1
$
unidad.
36

Esto significa que, por cada aumento de una unidad en las ventas, entre las 500 y 600 unidades, lautilidad disminuira en $1, aproximadamente.
Calculemos ahora las razones de cambio instantanea, relativa y porcentual de U . Como U(q) =10q − 0.01q2, tenemos que
U ′(q) = 10− 2(0.01)q = 10− 0.02q.
Luego, para q0 = 400, tenemos
r.c.i. U = 10− (0.02)(400) = 2,
r.c.r. U =2
10(400)− 0.01(400)2= 0.000833,
r.c.%. U = 0.000833× 100 % = 0.0833 %.
Ejemplo 5.16. De dos empresas competidoras M y P se conocen sus funciones de utilidad (enmiles de soles) respectivas UM(q) y UP (q), donde UM(20) = 20 y UP (20) = 15. Si se sabeque ambas empresas tienen la misma razon de cambio instantanea r.c.i. = 2 soles/unidad, ¿Queempresa fue mas eficiente en la obtencion de sus utilidades?
Solucion. Se sabe que ambas empresas tienen la misma razon de cambio instantanea, es decir
r.c.i.M = U ′M(20) = 2 = U ′P (20) = r.c.i. P
Obtengamos la razon de cambio relativo de cada empresa. En el caso de la empresa M :
r.c.r.M =U ′M(20)
UM(20)=
2
20= 0.1
y para la empresa P :
r.c.r. P =U ′P (20)
UP (20)=
2
15= 0.13333 . . .
Pese a que la empresa M tiene una mayor utilidad, como la razon de cambio relativo de la empresaP es mayor, entonces la empresa P fue mas eficiente en la obtencion de sus utilidades.
5.4. Variacion aproximadaDefinicion 5.17. Sea f : A→ R, una funcion derivable en el punto x0 ∈ A. El diferencial de f enel punto x0 es la funcion df(x0) : R→ R que a cada numero ∆x ∈ R asocia[
df(x0)](∆x) = f ′(x0)∆x.
Sobreentendido que el diferencial depende de los numeros x0 y ∆x, se escribe usualmente dy enlugar de
[df(x0)
]∆x; es decir
dy = f ′(x0)∆x.
El numero dy se denomina tambien variacion aproximada de y asociada a la variacion ∆x.
37

Sea f : A → R una funcion derivable en el punto x0 ∈ A ∩ A′. Entonces para un incrementopequeno ∆x, el diferencial dy = f ′(x0)∆x se aproxima al incremento ∆y = f(x + ∆x) − f(x).Es decir:
∆y ≈ dy.
Observacion. Consideremos la funcion identidad f : R → R, f(x) = x. Escribamos de maneraabreviada y = f(x) = x, entonces y′ = f ′(x) = 1 y
dx = f ′(x)∆x = ∆x.
Este es el llamado diferencial de la variable independiente x. Debido a esto, el diferencial de lavariable dependiente y se escribe como
dy = f ′(x)dx,
de donde, dividiendo entre dx, obtenemos la igualdad
dy
dx= f ′(x).
Ejemplo 5.18. El diferencial de la funcion f : R→ R, f(x) = x2 es[df(x)
](∆x) = 2x · dx.
Denotando y = x2, podemos escribir entonces dy = 2xdx.
Ejemplo 5.19. El costo total, en miles de dolares, de fabricar q cientos de unidades de ciertoartıculo es
C(q) = 0.01q2 + 2.5q − 50.
Siendo el nivel actual de produccion de 10000 unidades, se planea:
1. reducirlo en 500 unidades,
2. aumentarlo en 500 unidades.
Determine la variacion aproximada del costo debida a tal cambio y comparela con la variacionreal.
Solucion. El nivel actual de produccion es de q0 = 100 cientos de unidades. Observamos ademasque C ′(q) = 0.02q + 2.5 y por tanto C ′(q0) = 4.5.
1. Reducir el nivel de produccion en 500 unidades significa una variacion de ∆q = −5 (indi-cando el signo negativo la disminucion) cientos de unidades. Luego, la variacion aproximadadel costo asociada es
dC = C ′(q0)∆q = (4.5)(−5) = −22.5
y la variacion real del costo,
∆C = C(q0 + ∆q)− C(q0) = C(95)− C(100) = −22.25.
38

2. Por otro lado, un aumento de 500 unidades significa ∆q = 5 cientos de unidades, de dondela variacion aproximada del costo es
dC = C ′(q0)∆q = (4.5)(5) = 22.5,
mientras que la variacion real es
∆C = C(q0 + ∆q)− C(q0) = C(105)− C(100) = 22.75.
Definicion 5.20. Sean f : A → R, y = f(x) y x0 ∈ A. Con las condiciones y notacionesanteriores, siendo y0 = f(x0), definimos:
la variacion relativa (real) de y como∆y
y0
;
la variacion relativa aproximada de y comody
y0
;
la variacion porcentual (real) de y como ∆ %y =∆y
y0
· 100 %;
la variacion porcentual aproximada de y comody
y0
· 100 %.
Ejemplo 5.21. El PBI de cierto paıs esta medido por la expresion
N(t) = t2 + 5t+ 200,
donde N esta medida en miles de millones de dolares, y t es el tiempo medido en anos despues de1990. Determine la variacion porcentual aproximada del PBI durante el primer trimestre del 2008;ademas comparela con la variacion relativa.
Solucion. El inicio del primer trimestre del 2008 corresponde al tiempo t0 = 18, mientras que eltiempo transcurrido resulta ∆t = 1/4 de ano, o ∆t = 0.25. Vemos ademas que N ′(t) = 2t + 5.Luego, la variacion porcentual aproximada del PBI en el periodo es
dN
N0
· 100 % =N ′(t0)∆t
N(t0)· 100 % =
10.25
614· 100 % ≈ 1.67 %.
Por otro lado, la variacion porcentual (real) es
∆N
N0
· 100 % =N(t0 + ∆t)−N(t0)
N(t0)· 100 % =
10.313
614· 100 % ≈ 1.68 %;
de donde observamos que es bastante cercana al resultado anterior.
39

Ejemplo 5.22. En un paıs los ingresos nacionales brutos se comportan de acuerdo a la expresionI(t) = 1863 − 45e−0.08t, donde t es el tiempo transcurrido, en anos, despues del ano 1998 e I(t)son los ingresos medidos en millones de dolares. Calcule la variacion porcentual aproximada enlos ingresos durante el segundo trimestre del ano 2006.
Solucion. La formula para la variacion porcentual aproximada en los ingresos es
dI
I· 100 % =
I ′(t)∆t
I(t)· 100 %
para t+ ∆t = 8 + 0.5 se tiene que ∆t = 0.5 y t = 8, ademas
I ′(t) = 3.6e−0.08t
luegoI ′(8) = 3, 6e−0.08×8 ≈ 1.898
yI(8) = 1863− 45e−0.08×8 ≈ 1839.27
por tanto, la variacion porcentual aproximada pedida es
I ′(t)∆t
I(t)· 100 % =
1.898 · 0.51839.27
· 100 % ≈ 0.052 %.
Ası, durante el segundo trimestre de 2006, los ingresos nacionales brutos del paıs cambiaran a unatasa aproximada del 0.05 %.
40

SEMANA 6
VALOR APROXIMADO. APLICACIONES A LA
ECONOMIA. MONOTONICIDAD.
6.1. Valor aproximadoSea f : I → R una funcion, definida en un intervalo I , y sea x0 ∈ I . Si para cierto x ∈ I , sin
necesidad de calcular f(x), conocemos el valor de
∆f
∆x=f(x)− f(x0)
x− x0
,
entonces podemos calcular f(x) mediante
f(x) = f(x0) +∆f
∆x(x− x0) = f(x0) + ∆f.
Esto significa, que si de alguna manera podemos tener un valor aproximado de ∆f entonces po-demos calcular un valor aproximado de f(x). En ciertos casos, cuando ∆x es pequeno, podemosusar el diferencial de f para obtener un valor aproximado de f(x). En efecto, como ∆f ≈ df =f ′(x)∆x, entonces
f(x) = f(x0) + ∆f ≈ f(x0) + df = f(x0) + f ′(x)∆x.
Esto tiene una aplicacion interesante: si tanto la funcion f , como su derivada f ′, son faciles decalcular en el punto x0, entonces podemos calcular de manera aproximada f(x) para x suficiente-mente cercano a x0.
Ejemplo 6.1. Calcule un valor aproximado de√
65 usando el diferencial como una aproximacional incremento de la funcion.
41

Solucion. Dada f : [0,∞[→ R, f (x) =√x = x1/2, su derivada es f ′ (x) = 1
2x−1/2, x > 0.
Tomando x0 = 64 y ∆x = 1, podemos aproximar ∆y ≈ dy = f ′(x0)∆x = f ′(64) · 1 =1
16.
Entonces √65 = f (64 + 1) ≈ f (64) + ∆y = 8 +
1
16= 8.0625.
Si calculamos√
65 con una calculadora, obtenemos√
65 = 8.062257748 . . .. El error que obtene-mos de calcular
√65 usando el diferencial es de 0.000242252 . . ..
Ejemplo 6.2. El ingreso r (en dolares) que se obtiene con la venta de q unidades de un productoesta dada por:
r (q) = 250q + 45q2 − q3.
Determine la variacion aproximada en el ingreso si el numero de unidades se incrementa de q = 40a q = 41 unidades. Compare con la variacion real.
Solucion. Tenemos que el diferencial del ingreso r es
dr = r′ (q) dq =(250 + 90q − 3q2
)dq.
Cuando q = 40 y dq = 1,
dr =(250 + 90 (40)− 3 (40)2) = −950.
El cambio verdadero ∆r = r (41) − r (40) = −1026. En esta ocasion no se tiene una buenaaproximacion.
6.2. Aplicaciones a la economıa
Analisis marginalEn economıa, el uso de la derivada para aproximar el cambio producido en una funcion por un
cambio de una unidad en su variable se denomina analisis marginal.
Definicion 6.3. SiC(x) es el costo total de produccion en que incurre un fabricante cuando producex unidades e I(x) es el ingreso total obtenido de la venta de x unidades, entoncesCMg(x) = C ′(x)se denomina costo marginal y IMg(x) = I ′(x) se denomina ingreso marginal.
Si la produccion (o ventas) se incrementa en 1 unidad, entonces ∆x = 1 y la formula deaproximacion
∆C = C(x+ ∆x)− C(x) ≈ C ′(x)∆x
se convierte en∆C = C(x+ 1)− C(x) ≈ C ′(x),
de igual forma∆I = I(x+ 1)− I(x) ≈ I ′(x).
42

Es decir, el Costo Marginal CMg(x) es una aproximacion al costo adicional C(x+ 1)− C(x) deproducir la unidad adicional x+ 1; de igual forma, el Ingreso Marginal IMg(x) es una aproxima-cion del ingreso adicional obtenido al vender la unidad adicional x+ 1.
Ejemplo 6.4. Un fabricante estima que cuando se producen x unidades de determinado artıculo,
el costo total sera C(x) =x2
8+ 3x + 98 dolares y que p(x) =
75− x3
dolares por unidad es elprecio al cual se venderan las x unidades.
1. Determine el costo adicional aproximado y real de producir la novena unidad.
2. Determine el ingreso adicional aproximado y real de vender la novena unidad.
Solucion. Calculemos el costo y el ingreso marginal
C(x) =x2
8+ 3x+ 98 =⇒ C ′(x) =
x
4+ 3,
I(x) = p(x) · x =75x− x2
3=⇒ I ′(x) =
75− 2x
3.
1. El costo adicional aproximado de producir la novena unidad sera C ′(8) = $5 mientras queel costo real es ∆C = C(9)− C(8) = $5.125.
2. El ingreso adicional aproximado de vender la novena unidad sera I ′(8) = $19.67 mientrasque el ingreso real es ∆I = I(9)− I(8) = $19.33.
Definicion 6.5. Si C(x) es el costo total de producir x unidades e I(x) es el ingreso total obtenidode la venta de x unidades, entonces el costo medio por unidad es
CMe(x) =C(x)
x,
y el ingreso medio por unidad es
IMe(x) =I(x)
x.
Ejemplo 6.6. El costo medio CMe(x) (en dolares) de un fabricante esta dado por:
CMe(q) = 0.01q + 5 +500
q.
Encuentre la funcion de costo marginal y el costo marginal cuando se producen 50 unidades.Interprete el resultado obtenido.
Solucion. Tenemos en primer lugar que:
C(q) = CMe(q) · q
43

y por tanto tendrıamos que la funcion costo total es:
C(q) =
(0.01q + 5 +
500
q
)q = 0, 01q2 + 5q + 500.
Por consiguiente, el costo marginal es:
CMg(q) = C ′(q) = 0.02q + 5.
El costo marginal cuando q = 50 es C ′(50) = 6 dolares/unidad. Es decir, el costo adicional deproducir la unidad 51 es aproximadamente de 6 dolares.
Ejemplo 6.7. Un vendedor estima que el precio al cual se venderan las x unidades de determinadoartıculo sera p(x) = 5
4(4− x). Hallar el ingreso marginal.
Solucion. El ingreso total esta dado por I(x) = p(x) · x. Luego,
I(x) = p(x) · x = 5x− 5x2
4
y el ingreso marginal
I ′(x) = 5− 5x
2.
La funcion de utilidad, cuyo significado es el mismo de ganancia, es el beneficio que se obtienede producir algun bien o servicio. Si x son las unidades producidas y vendidas, en un caso ideal,entonces la funcion de utilidad se define como
U(x) = I(x)− C(x)
de esta relacion se concluye que si I(x) > C(x) la utilidad es positiva y hay ganancia; pero si losingresos son menores que los costos, hay perdida.
Definicion 6.8. La utilidad marginal se define como UMg(x) = U ′(x) y es una aproximacion ala ganancia adicional de producir y vender la unidad x+ 1.
Elasticidad de la demandaLa elasticidad de la demanda es un concepto que en economıa se utiliza para medir como un
cambio en el precio de un producto afecta la cantidad demandada. Esto es, se refiere a la respuestadel consumidor frente al cambio del precio. En estos terminos, la elasticidad de la demanda es larazon del cambio porcentual en la cantidad demandada que resulta en un cambio porcentual dadoen el precio:
variacion porcentual de la cantidad demandadavariacion porcentual del precio
.
44

Definicion 6.9. La elasticidad de la funcion demanda es el cociente entre la variacion porcentualde la demanda y la variacion porcentual en el precio, esto es
Ed =∆ %q
∆ %p=
∆qq0∆pp0
=∆q
∆p· p0
q0
.
Ademas,
1. cuando |Ed| > 1, la demanda es elastica (la variacion de la cantidad demandada es porcen-tualmente superior a la del precio);
2. cuando |Ed| = 1, la demanda tiene elasticidad unitaria (la variacion de la cantidad deman-dada es porcentualmente igual a la del precio);
3. cuando |Ed| < 1, la demanda es inelastica (la variacion de la cantidad demandada es por-centualmente inferior a la del precio).
Observacion. La elasticidad indica como varıa q (en terminos porcentuales) en respuesta a unavariacion porcentual de p. Algunos autores colocan un signo negativo en la formula, sin embargolo importante es el valor absoluto de la elasticidad Ed.
Ejemplo 6.10. Si para una disminucion de 20 % en el precio de un producto, la cantidad deman-dada crece 4 %, entonces la elasticidad de la demanda es:
Ed =∆ %q
∆ %p=
4100
− 20100
= −1
5.
Observe que en este caso, −20 % = ∆ %p =0.8p0 − p0
p0
× 100 %, donde p0 es el precio siendo
disminuido.Digamos ahora que se retira un impuesto del 20 % sobre el precio de un producto y que, en este
caso, la cantidad demandada crece 4 %. Tenemos que la variacion porcentual del precio esta dadapor
∆ %p =p0 − 1.2p0
1.2p0
× 100 % = −1
6× 100 %.
Este valor se debe a que si el precio sin impuesto es p0 entonces el precio con impuesto es 1.2p0.Luego, la elasticidad de la demanda es:
Ed =∆ %q
∆ %p=
4 %
−16× 100 %
=4
100−16
= − 24
100= − 6
25.
La definicion de elasticidad de la demanda depende del valor inicial de las cantidades. En elsegundo ejemplo la cantidad inicial era un precio incluyendo un impuesto, por lo tanto el resul-tado no coincide con el anterior ejemplo, a pesar que la cantidad demandada crece en el mismoporcentaje. Veremos una forma de resolver esta asimetrıa al definir una elasticidad por medio dederivadas, la cual no necesita especificar dos puntos (inicial y final).
Observe que Ed = pq.∆q∆p
, y como podemos expresar q en funcion de p, haciendo ∆p → 0,tenemos la siguiente definicion.
45

Definicion 6.11. Si q = f(p) es una funcion de demanda derivable, la elasticidad puntual de lademanda, denotada por la letra griega η, en (q, p) esta dada por
η =p
q· dqdp.
Ademas,
1. cuando |η| > 1, la demanda es elastica;
2. cuando |η| = 1, la demanda tiene elasticidad unitaria;
3. cuando |η| < 1, la demanda es inelastica.
Recordemos que∆q
q≈ dq
q=p
q· dqdp· dpp≈ η · ∆p
p,
es decir, la variacion relativa de q es aproximadamente igual al producto de la elasticidad η y la
variacion relativa de p. Si la variacion porcentual de p es del 1 %, entonces∆p
p= 1 % y por lo
tanto∆q
q≈ η.
Debido a esto, algunos autores definen la elasticidad como la variacion porcentual aproximada dela demanda asociada a una variacion del precio de 1 %.
Observacion. Si en lugar de tener q = f(p) se dispone de p = g(q), podemos utilizar la regla dederivacion de la funcion inversa
dq
dp=
1dpdq
.
Ejemplo 6.12. Dado la ecuacion de la demanda
p = 150− eq
100 .
Determine la elasticidad puntual de la ecuacion de la demanda cuando q = 100.
Solucion. Observe quedp
dq= − 1
100e
q100 . La elasticidad puntual es:
η =p
q· dqdp
=p
q· 1dpdq
=150− e q
100
q· 1
− 1100e
q100
.
Cuando q = 100 tenemos que
η =150−e
100100
100
− 1100e
100100
= −54.18.
Por lo que la demanda es elastica.
46
6.3. MonotonicidadDefinicion 6.13. Sea f : I → R una funcion definida en un intervalo. Decimos que f es cre-ciente si para todo par de puntos x1, x2 ∈ I , x1 < x2 implica f(x1) ≤ f(x2). Decimos que f esestrictamente creciente si para todo par de puntos x1, x2 ∈ I , x1 < x2 implica f(x1) < f(x2).
De manera analoga podemos definir funciones decrecientes y estrictamente decrecientes. Unafuncion de cualquiera de estos cuatro tipos se denomina monotona.
Ejemplos. Los siguientes son ejemplos de funciones monotonas.
1. La funcion f : R → R definida por f(x) = x es estrictamente creciente, porque x1 < x2
implica x1 < x2.
2. La funcion f :]−∞, 0]→ R definida por f(x) = x2 es estrictamente decreciente.
3. La funcion f : [0,+∞[→ R definida por f(x) = x2 es estrictamente creciente.
4. Toda funcion constante es creciente y decreciente a la vez.
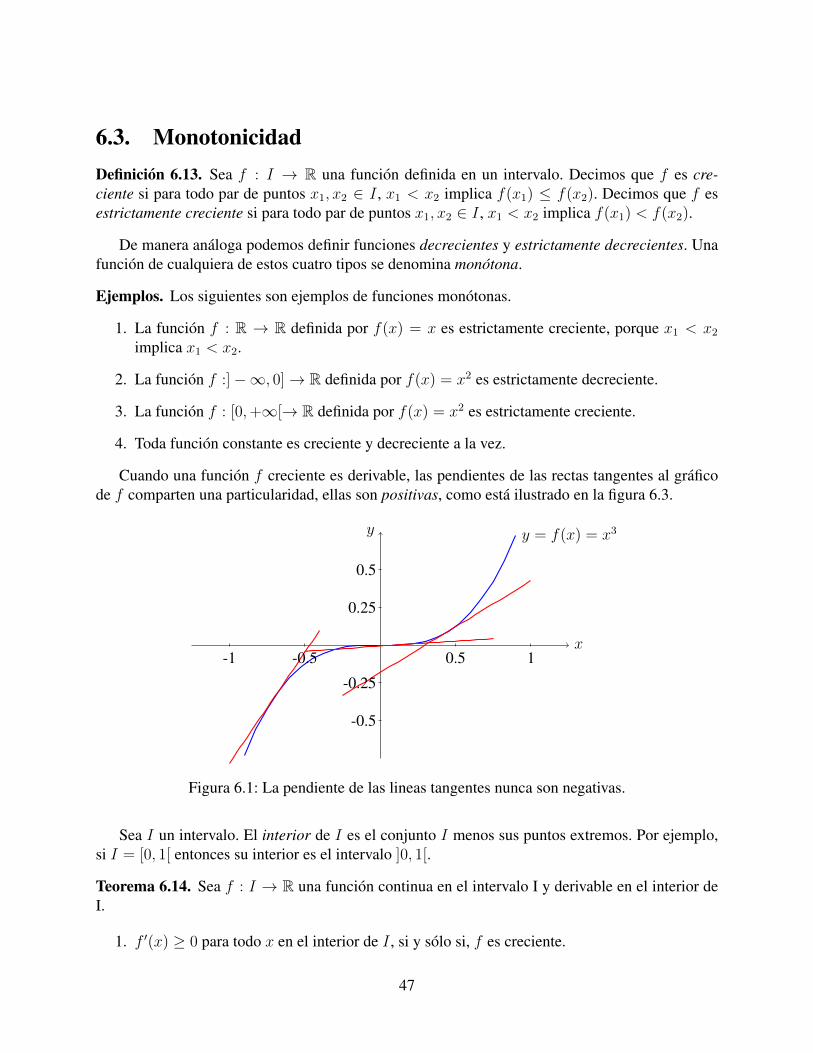
Cuando una funcion f creciente es derivable, las pendientes de las rectas tangentes al graficode f comparten una particularidad, ellas son positivas, como esta ilustrado en la figura 6.3.
x
y y = f(x) = x3
0.5 1-0.5-1
-0.5
-0.25
0.5
0.25
Figura 6.1: La pendiente de las lineas tangentes nunca son negativas.
Sea I un intervalo. El interior de I es el conjunto I menos sus puntos extremos. Por ejemplo,si I = [0, 1[ entonces su interior es el intervalo ]0, 1[.
Teorema 6.14. Sea f : I → R una funcion continua en el intervalo I y derivable en el interior deI.
1. f ′(x) ≥ 0 para todo x en el interior de I , si y solo si, f es creciente.
47

2. f ′(x) > 0 para todo x en el interior de I implica que f es estrictamente creciente.
3. f ′(x) ≤ 0 para todo x en el interior de I , si y solo si, f es decreciente.
4. f ′(x) < 0 para todo x en el interior de I implica que f es estrictamente decreciente.
Ejemplos. Para las siguientes funciones monotonas usamos el teorema anterior.
1. La funcion f : R → R definida por f(x) = x3 es estrictamente creciente, porque f ′(x) =3x2 la cual siempre es positiva excepto en cero. Pero en cero se puede verificar que tambiencumple la definicion, entonces sera estrictamente creciente.
2. La funcion exponencial es estrictamente creciente, porque su derivada (ex)′ = ex es siemprepositiva. Lo mismo ocurre con el logaritmo natural.
3. La funcion f :]−∞, 0[→ R definida por f(x) = x4 es estrictamente decreciente, porque suderivada f ′(x) = 4x3 es negativa en su dominio.
Ejemplo 6.15. Se tiene que la funcion de ingreso esta dada por I(x) = −2x3 + 9x2 − 12x+ 100.¿En que rango de ventas obtenemos un ingreso creciente? Por el teorema anterior es suficienteencontrar los puntos x donde f ′(x) ≥ 0. Como f ′(x) = −6x2 + 18x − 12 = −6(x − 1)(x − 2),entonces −6(x− 1)(x− 2) ≥ 0 implica x ∈ [1, 2].
Como hemos visto antes, si una funcion es constante su derivada es cero. ¿Que podemos decirsobre el recıproco? La respuesta la damos en el siguiente corolario.
Corolario 6.16. Sea f : I → R continua en su dominio y derivable en el interior de I . Si f ′(x) = 0para todo x, entonces f(x) = c donde c es una constante.
En efecto, del teorema anterior tenemos que f es creciente y decreciente al mismo tiempo, esdecir, f(x1) ≤ f(x2) y f(x1) ≥ f(x2) para todo par de puntos en I . Esto implica que la funciones constante.
48
SEMANA 7
MAXIMOS Y MINIMOS. CONVEXIDAD.
7.1. Maximos y mınimosDefinicion 7.1. Dada una funcion f : I → R decimos que x0 ∈ I es un punto maximo (absoluto)de f si f(x0) ≥ f(x) para todo x ∈ I . En este caso decimos que f(x0) es el valor maximo(absoluto) de f . De forma similar podemos definir un punto mınimo y el valor mınimo de f .
Observacion. Los puntos maximos absolutos no son unicos en general, pero el valor maximo silo es. Por ejemplo, la funcion coseno definida en todos los reales tiene un unico valor maximoabsoluto: 1. Este valor maximo se obtiene en cualquier punto en el dominio de la forma 2πk dondek es un numero entero.
Definicion 7.2. Sea f : I → R una funcion definida en un intervalo I . Decimos que x0 ∈ I es unpunto maximo local de f si existe δ > 0 tal que f(x0) ≥ f(x) para todo x ∈ ]x0 − δ, x0 + δ[∩ I .El numero real f(x0) se denomina valor maximo local. De manera analoga podemos definir puntomınimo local y valor mınimo local de f .
Observacion. Claramente, el maximo (mınimo) absoluto es en particular un maximo (mınimo)local. La recıproca no es cierta en general.
Teorema 7.3. (Teorema de Fermat) Si f : I → R tiene un maximo o mınimo local en un punto x0
en el interior de I y f es derivable en ese punto, entonces f ′(x0) = 0.
Observacion. La afirmacion recıproca no es cierta en general. Por ejemplo f(x) = x3 es unafuncion creciente para todo x ∈ R. Sin embargo f ′(x) = 3x2 implica que f ′(0) = 0 pero el cerono es un punto maximo o mınimo local como vemos en la figura 6.3.
Teorema 7.4. (Criterio de la primera derivada) Sea f : I → R una funcion continua en I yderivable en el interior de I − {x0}.
1. Si f ′(x) ≥ 0 para x < x0 y f ′(x) ≤ 0 para x > x0, entonces x0 es el maximo de f .
49

x
y
a
b
Figura 7.1: Valores maximos y mınimos locales.
2. Si f ′(x) ≤ 0 para x < x0 y f ′(x) ≥ 0 para x > x0, entonces x0 es el mınimo de f .
Restringiendo f a subintervalos de I encontramos un criterio similar para maximos y mınimoslocales.
Ejemplo 7.5. Para la funcion f(x) = |x| tenemos que f ′(x) = −1 < 0 para x < 0 y f ′(x) = 1 > 0para x > 0. Por el criterio de la primera derivada el punto x0 = 0 es el mınimo de f .
Definicion 7.6. Sea f : I → R una funcion continua. Un punto crıtico de f es un punto x0 en elinterior de I donde la funcion no es derivable, o la funcion es derivable y f ′(x0) = 0.
Teorema 7.7. (Criterio de la segunda derivada) Sean f : I → R una funcion que se puede derivardos veces en el interior de I y x0 un punto crıtico en dicho interior (por ende, f ′(x0) = 0).
1. Si f ′′(x0) < 0, entonces x0 es un maximo local.
2. Si f ′′(x0) > 0, entonces x0 es un mınimo local.
Damos una idea de la prueba de la primera parte y dejamos la segunda como ejercicio. Como
f ′′(x0) = lımx→x0
f ′(x)− f ′(x0)
x− x0
= lımx→x0
f ′(x)
x− x0
< 0,
entonces para x suficientemente cerca de x0 tenemos quef ′(x)
x− x0
< 0. Esto implica que f ′(x) > 0
cuando x < x0 y f ′(x) < 0 cuando x > x0. Por el criterio de la primera derivada, x0 debe sermaximo local.
Observacion. Si f ′′(x0) = 0 en general no podemos decidir si el punto crıtico x0 es un maximolocal, mınimo local o ninguno de los dos. Por ejemplo, la funciones definidas por f(x) = −x4,g(x) = x4 y h(x) = x3 tienen un punto crıtico en x0 = 0 y segunda derivada nula en x0. Sinembargo x0 = 0 es un maximo de f , un mınimo de g, y ninguna de las anteriores para h. En estoscasos es mejor usar el criterio de la primera derivada.
50

Ejemplo 7.8. La funcion f(x) = 6x − x2 tiene como derivada f ′(x) = 6 − 2x, entonces x0 = 3es el unico punto crıtico de la funcion. Como f ′′(x) = −2 < 0 esto nos dice que x0 es un maximolocal. De hecho x0 es el maximo absoluto de f porque f ′(x) > 0 para x < x0 y f ′(x) < 0 parax > x0.
Ahora volvemos al problema original: ¿Como calcular los maximos y mınimos de una funcioncontinua definida en un intervalo cerrado? Como vimos antes, el Teorema de Weierstrass nos diceque dichos puntos deben existir.
Teorema 7.9. Sea f : I → R una funcion continua definida en un intervalo cerrado. Para encontrarel maximo (o mınimo) absoluto evaluamos f en los extremos de I y en los puntos crıticos. Si f(x0)es el maximo de dichos valores, entonces el punto x0 es un maximo absoluto de f .
Ejemplo 7.10. La funcion de costo de una empresa esta definida por C(x) = −2x4 + 25x3 −98x2 + 129x miles de dolares, donde x representa cientos de unidades producidas en una fabricacon una capacidad maxima de produccion de 400 unidades diarias. Encuentre el maximo costo yel mınimo costo de produccion.
El dominio de la funcion en este caso es el intervalo cerrado [0, 4]. La funcion es derivableen todo punto ası que es necesario evaluarla solo en los extremos y en los puntos crıticos. En losextremos tenemos que C(0) = 0 y C(4) = 36. Como C ′(x) = −8x3 +75x2−196x+129 haciendoC ′(x) = 0 obtenemos dos puntos crıticos: x1 = 1 y x2 = 3. Entonces C(1) = 54 y C(3) = 18implican que 0 soles es el costo mınimo y 54 000 soles es el maximo costo de produccion.
Observacion. En caso sea necesario clasificar los puntos como maximos o mınimos locales pode-mos usar el criterio de la primera o segunda derivada.
7.2. Concavidad y ConvexidadHemos visto como encontrar el maximo y mınimo de una funcion. De la misma forma es a
veces util hacer lo mismo con la derivada de la funcion. En este caso nos vemos en la necesidad deanalizar la segunda derivada.
Definicion 7.11. Una funcion f : I → R se dice convexa si para todo par de puntos x1, x2 ∈ I ypara cualquier 0 ≤ t ≤ 1 se cumple
f(tx1 + (1− t)x2) ≤ tf(x1) + (1− t)f(x2).
Teorema 7.12. Una funcion f : I → R derivable dos veces en el interior de I es convexa, si ysolo si, f ′′(x) ≥ 0 para todo x en dicho interior. De la misma forma, f es concava, si y solo si,f ′′(x) ≤ 0.
Funcion convexa Funcion concava
51

Ejemplos. En los siguientes ejemplos f : R→ R
1. La funcion f(x) = x2 es convexa en su dominio, porque f ′′(x) = 2 > 0.
2. La funcion f(x) = −x2 es concava en su dominio, porque f ′′(x) = −2 < 0.
3. La funcion f(x) = x3 no es concava ni convexa en su dominio. Sin embargo podemoscomprobar que es concava para x < 0 y convexa para x > 0.
4. Toda funcion lineal y = f(x) = mx+ b es concava y convexa en su dominio.
Definicion 7.13. Sea f : I → R una funcion continua y x0 un punto en el interior de I . Diremosque x0 es un punto de inflexion de f , si en x0 hay un “cambio de curvatura” de f , es decir existeδ > 0 tal que f es convexa en ]x0 − δ, x0[ y no convexa en ]x0, x0 + δ[; o viceversa.
Ejemplos.
1. En los dos primeros ejemplos dados enteriormente, f no tiene puntos de inflexion, pues f esconvexa en el primer ejemplo y concava en el segundo ejemplo.
2. La funcion f(x) = x3 tiene un punto de inflexion en x0 = 0, porque como vimos anterior-mente en x0 cambia de concava a convexa.
3. La funcion lineal f(x) = mx + b no posee puntos de inflexion, dado que en ningun puntode su dominio ocurre un cambio de curvatura.
Teorema 7.14. Sea f : I → R una funcion dos veces derivable y x0 un punto en el interior de I .Si x0 es un punto de inflexion, entonces f ′′(x0) = 0.
El teorema se sigue de la definicion, porque si f se puede derivar dos veces en x0, entoncesf ′′(x0) ≥ 0 y f ′′(x0) ≤ 0 implican f ′′(x0) = 0. El recıproco en general no es cierto. Por ejemplo,si f(x) = x4 entonces f ′′(0) = 0 pero x0 = 0 no es punto de inflexion, porque la funcion esconvexa a los dos lados del cero.
Este teorema nos da un criterio para encontrar puntos de inflexion. Si f : I → R es derivabledos veces en el interior de I primero buscamos todos los puntos crıticos de f ′ y de esta listaescogemos los que satisfacen la definicion.
Observacion. Podemos demostrar que para funciones dos veces derivables, un punto crıtico queno es maximo o mınimo local sera necesariamente un punto de inflexion.
7.3. Trazado de curvas planasEl estudio de la primera y segunda derivada nos ayudan a describir el crecimiento, decreci-
miento, maximos, mınimos, concavidad, convexidad y puntos de inflexion de una funcion. Estadescripcion nos permite esbozar en mayor detalle la grafica de la funcion. Ilustramos este procesocon el siguiente ejemplo.
52

Ejemplo 7.15. Considere la funcion B : [0, 10]→ R, dada por B(t) = 10− (t− 1)2e1−t.
1. Encuentre los periodos de crecimiento y decrecimiento de B.
2. Halle los puntos maximos y mınimos locales y absolutos.
3. Encuentre los periodos en los cuales B es convexo y concavo.
4. Esbozar el grafico de B.
Solucion. Notemos primero que B tiene como dominio el intervalo cerrado [0, 10].
1. Como B′(t) = (t − 1)(t − 3)e1−t vemos que entre 0 y 1 B′(t) > 0, es decir, la funciones estrictamente creciente. Entre 1 y 3 B′(t) < 0 y entonces la funcion es estrictamentedecreciente. Finalmente, entre 3 y 10 B′(t) > 0 y entonces la funcion es estrictamentecreciente.
2. De la parte anterior vemos que lo puntos crıticos son t1 = 1, t2 = 3. Por el criterio de laprimera derivada 1 es un maximo local y 3 es un mınimo local. De la parte anterior tenemostambien que 0 es un mınimo local y 10 es maximo local. Como B(0) ≈ 7.28, B(1) = 10,B(3) ≈ 9.8, y B(10) ≈ 9.99 concluimos que 1 es el punto maximo absoluto y 0 es el puntomınimo absoluto.
3. De B′′(t) = −(x2 − 6x + 7)e1−t obtenemos que B′′(t) < 0 entre 0 y 3 −√
2, B′′(t) > 0entre 3−
√2 y 3 +
√2, y B′′(t) < 0 entre 3 +
√2 y 10. Esto nos dice que B es concava en
el primer y tercer intervalo y convexa en el segundo.
4. Mostramos a continuacion una forma de resumir la informacion obtenida y con ella esbozarB. Para ello introducimos la siguiente notacion. Usaremos el sımbolo ↗ para senalar queuna funcion es creciente y↘ para las decrecientes. El sımbolo ∪ representa que la funcion esconvexa y ∩ que es concava. Si la funcion es creciente y convexa usaremos el sımbolo ^. Dela misma manera podemos definir ^ , _, y _ . En la base de la siguiente tabla tenemos losextremos del dominio y los puntos crıticos de la funcion y su derivada. Las columnas indicanlos sub-intervalos generados por los puntos dados. La primera fila nos da el crecimiento ydecrecimiento de la funcion. En la segunda indicamos la concavidad y convexidad. En latercera fila combinamos la informacion de la primera y segunda fila. La grafica resultante semuestra en la derecha.
0 1 1.59 3 4.41 10
⋂ ⋃ ⋂
2.5 5
10
53

SEMANA 9
FUNCIONES DE VARIAS VARIABLES.DERIVADAS PARCIALES
9.1. El espacio Rn
El conjunto formado por todas las n-uplas ordenadas
P = (x1, x2, · · · , xn)
donde x1, x2, · · · , xn ∈ R, es llamado espacio euclidiano n-dimensional y sera denotado por Rn.Luego, un subconjunto de Rn es simplemente un conjunto de n-uplas contenido en Rn.
Ejemplos. Consideremos
1. A = {(x1, x2) ∈ R2 : x21 + x2
2 < 1} es un subconjunto de R2.
2. B = {(x1, x2) ∈ R2 : x21 + x2
2 < 4 y x21 + x2
2 ≥ 1} es un subconjunto de R2.
3. C = {(x1, x2, x3) ∈ R3 : x1 > 0, x2 > 0} es un subconjunto de R3. En este caso, C estaformado por las ternas ordenadas que tienen sus primeras dos coordenadas positivas.
Como bien sabemos, el conjunto R puede representarse geometricamente como una recta. Aho-ra, en el caso de R2, es natural representarlo geometricamente como un plano, conocido comoplano cartesiano. Del mismo modo, R3 tambien tiene una representacion geometrica conocidacomo espacio tridimensional (vea la figura 9.1). Sin embargo, no es posible obtener una represen-tacion geometrica para Rn, con n ≥ 4.
Definiremos ahora la nocion de funcion de varias variables.
Definicion 9.1. Toda funcion f : A ⊆ Rn → R, cuyo dominio A es un subconjunto de Rn, n ≥ 2,sera llamada funcion de n variables.
Esto significa que a cada punto (x1, x2, · · · , xn) ∈ A la funcion f le asigna un unico numeroreal z = f(x1, x2, · · · , xn). En este caso consideramos z como la variable dependiente.
54

y
z
x
(x1, x2, x3)
x3
x1
x2
Figura 9.1: Representacion geometrica de R3.
Ejemplos. Consideremos
1. A = {(x1, x2) ∈ R2 : x21 +x2
2 < 1} y f : A→ R definida por f(x1, x2) = ln(1−x12−x2
2).
2. A = {(x1, x2) ∈ R2 : x21 + x2
2 < 4 y x21 + x2
2 ≥ 1} y f : A→ R definida por
f(x1, x2) =√x2
1 + x22 − 1 + ln(4− x2
1 − x22).
3. A = R3 y f : A→ R definida por f(x1, x2, x3) = x31 + x2
2 + x3 + x1x2x3 + x2x23.
Ejemplo 9.2. Supongase que en una fabrica, la produccion esta dada por una funcion de produc-cion del tipo Cobb-Douglas
Q(K,L) = 60K13L
23
donde K es el capital invertido medido en miles de dolares y L es el tamano de la fuerza laboralmedido en trabajadores-hora. Por ejemplo si se invierte un capital de $512000 y se tiene 1000trabajadores-hora de fuerza laboral, se tendra una produccion de
Q(512, 1000) = 60 · 51213 · 1000
23 = 48000
unidades producidas.
En la mayorıa de ejemplos que veremos, tendremos una expresion f(x1, . . . , xn) de variasvariables, para la cual no tendremos a priori su “dominio”. En este caso, bajo ciertas condiciones,podemos obtener su “dominio maximo” ya sea inspeccionando la formula o deduciendolo delcontexto.
Ejemplo 9.3. Considerando la formula f(x, y) = ln(1−x2−y2), podemos determinar su maximodominio haciendo x2 + y2 < 1, pues de otra manera el logaritmo esta indefinido. Ası el dominioseria el interior del cırculo de radio 1 y centro en el origen.
55

x
y
(1, 0)
(0, 1)
Ejemplo 9.4. La expresion f(x, y) =√x2 + y2 − 1 + ln(4 − x2 − y2), tiene dominio maximo
cuando x2 + y2 ≥ 1 con el objetivo de que la raız cuadrada sea real, mientras que se debera tenerx2 + y2 < 4 para que este definido el logaritmo.
x
y
Ejemplo 9.5. Sea U(x, y) = 2x2y3 una funcion de utilidad, donde x e y representan cantidades dedos bienes. En este caso, como x e y representan cantidades, el dominio maximo de U es dado porD = {(x, y) : x ≥ 0, y ≥ 0}, el primer cuadrante de R2.
9.2. Representacion grafica de funciones de dos variablesDefinicion 9.6. La grafica de una funcion de dos variables f : A ⊆ R2 → R, denotada Gr(f), esel conjunto de todas las ternas (3-uplas) (x, y, z) tales que (x, y) ∈ A y z = f(x, y); es decir
Gr(f) = {(x, y, z) ∈ R3 : (x, y) ∈ A, z = f(x, y)}.
Ejemplo 9.7. Sea la funcion f(x, y) = x2 + y2. Las variables independientes pueden tomar cual-quier valor real. En este caso podemos graficar los valores que toma f(x, y) usando este valorcomo la tercera coordenada de R3. Esto quiere decir que a cada par de valores x e y le correspondeun valor z dado por la funcion f .
56

y
z
x
Ejemplo 9.8. Sea la funcion f(x, y) =√x2 + y2. Las variables independientes pueden tomar
cualquier valor real. En este caso podemos graficar los valores que toma f(x, y) usando este valorcomo la tercera coordenada de R3. Esto quiere decir que a cada par de valores x e y le correspondeun valor z dado por la funcion f .
y
z
x
Ejemplo 9.9. Sea la funcion f(x, y) = 5. Las variables independientes pueden tomar cualquiervalor real. En este caso podemos graficar los valores que toma f(x, y) usando este valor como latercera coordenada de R3. Esto quiere decir que a cada par de valores x e y le corresponde un valorz dado por la funcion f .
57
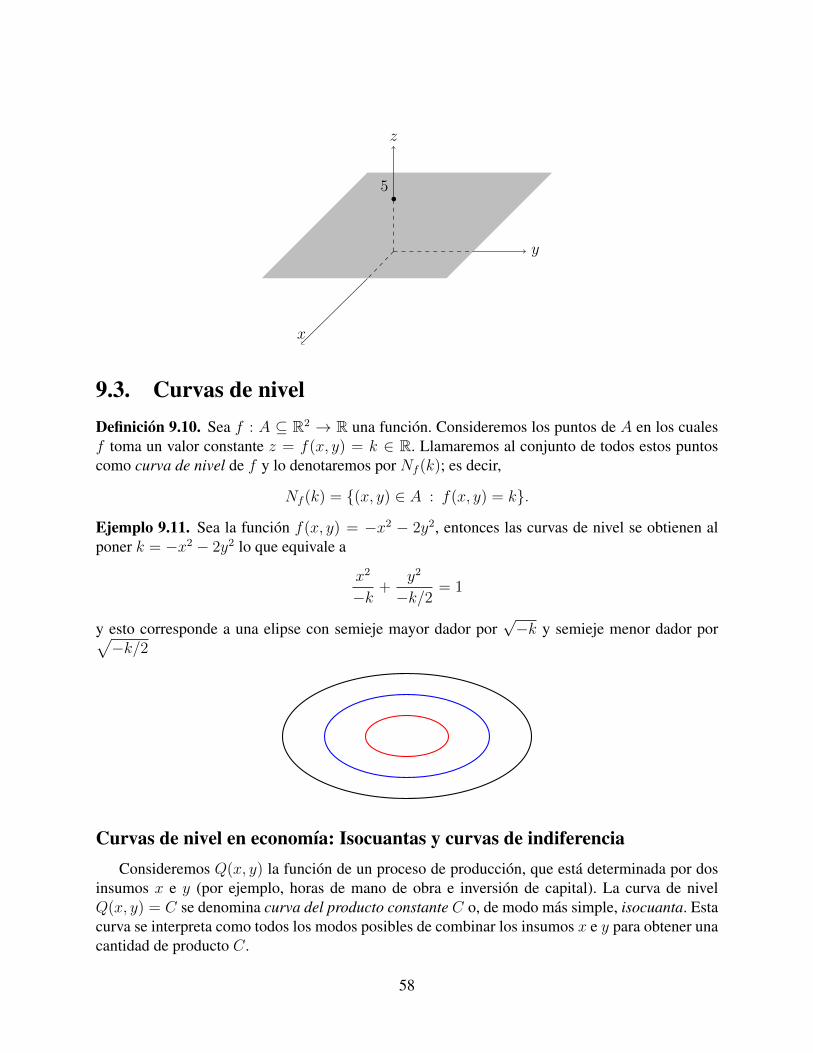
y
z
x
5
9.3. Curvas de nivelDefinicion 9.10. Sea f : A ⊆ R2 → R una funcion. Consideremos los puntos de A en los cualesf toma un valor constante z = f(x, y) = k ∈ R. Llamaremos al conjunto de todos estos puntoscomo curva de nivel de f y lo denotaremos por Nf (k); es decir,
Nf (k) = {(x, y) ∈ A : f(x, y) = k}.
Ejemplo 9.11. Sea la funcion f(x, y) = −x2 − 2y2, entonces las curvas de nivel se obtienen alponer k = −x2 − 2y2 lo que equivale a
x2
−k+
y2
−k/2= 1
y esto corresponde a una elipse con semieje mayor dador por√−k y semieje menor dador por√
−k/2
Curvas de nivel en economıa: Isocuantas y curvas de indiferenciaConsideremos Q(x, y) la funcion de un proceso de produccion, que esta determinada por dos
insumos x e y (por ejemplo, horas de mano de obra e inversion de capital). La curva de nivelQ(x, y) = C se denomina curva del producto constante C o, de modo mas simple, isocuanta. Estacurva se interpreta como todos los modos posibles de combinar los insumos x e y para obtener unacantidad de producto C.
58
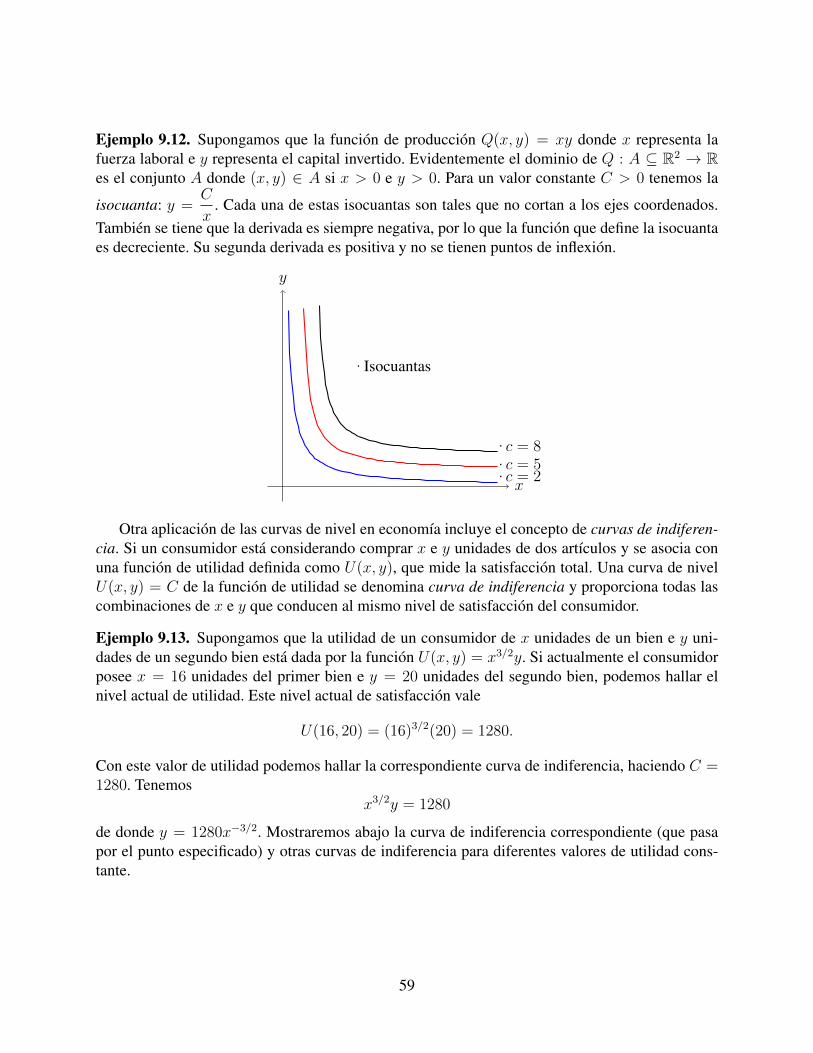
Ejemplo 9.12. Supongamos que la funcion de produccion Q(x, y) = xy donde x representa lafuerza laboral e y representa el capital invertido. Evidentemente el dominio de Q : A ⊆ R2 → Res el conjunto A donde (x, y) ∈ A si x > 0 e y > 0. Para un valor constante C > 0 tenemos la
isocuanta: y =C
x. Cada una de estas isocuantas son tales que no cortan a los ejes coordenados.
Tambien se tiene que la derivada es siempre negativa, por lo que la funcion que define la isocuantaes decreciente. Su segunda derivada es positiva y no se tienen puntos de inflexion.
x
y
Isocuantas
c = 2c = 5c = 8
Otra aplicacion de las curvas de nivel en economıa incluye el concepto de curvas de indiferen-cia. Si un consumidor esta considerando comprar x e y unidades de dos artıculos y se asocia conuna funcion de utilidad definida como U(x, y), que mide la satisfaccion total. Una curva de nivelU(x, y) = C de la funcion de utilidad se denomina curva de indiferencia y proporciona todas lascombinaciones de x e y que conducen al mismo nivel de satisfaccion del consumidor.
Ejemplo 9.13. Supongamos que la utilidad de un consumidor de x unidades de un bien e y uni-dades de un segundo bien esta dada por la funcion U(x, y) = x3/2y. Si actualmente el consumidorposee x = 16 unidades del primer bien e y = 20 unidades del segundo bien, podemos hallar elnivel actual de utilidad. Este nivel actual de satisfaccion vale
U(16, 20) = (16)3/2(20) = 1280.
Con este valor de utilidad podemos hallar la correspondiente curva de indiferencia, haciendo C =1280. Tenemos
x3/2y = 1280
de donde y = 1280x−3/2. Mostraremos abajo la curva de indiferencia correspondiente (que pasapor el punto especificado) y otras curvas de indiferencia para diferentes valores de utilidad cons-tante.
59
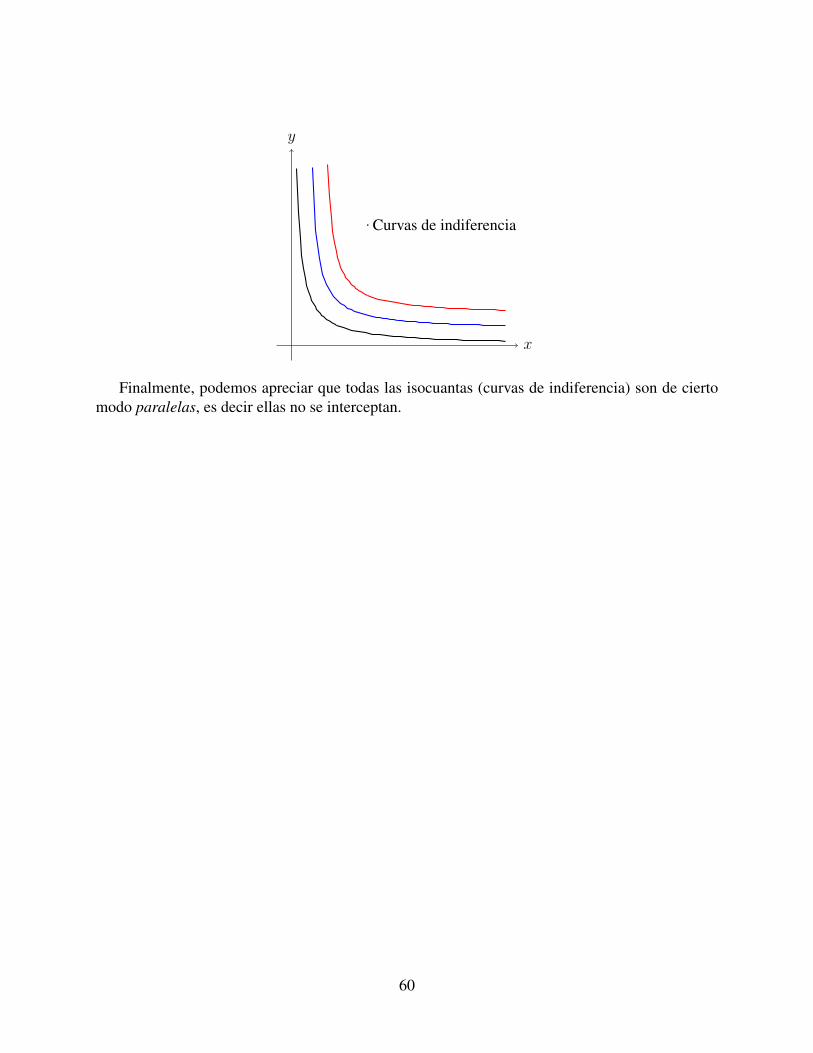
x
y
Curvas de indiferencia
Finalmente, podemos apreciar que todas las isocuantas (curvas de indiferencia) son de ciertomodo paralelas, es decir ellas no se interceptan.
60
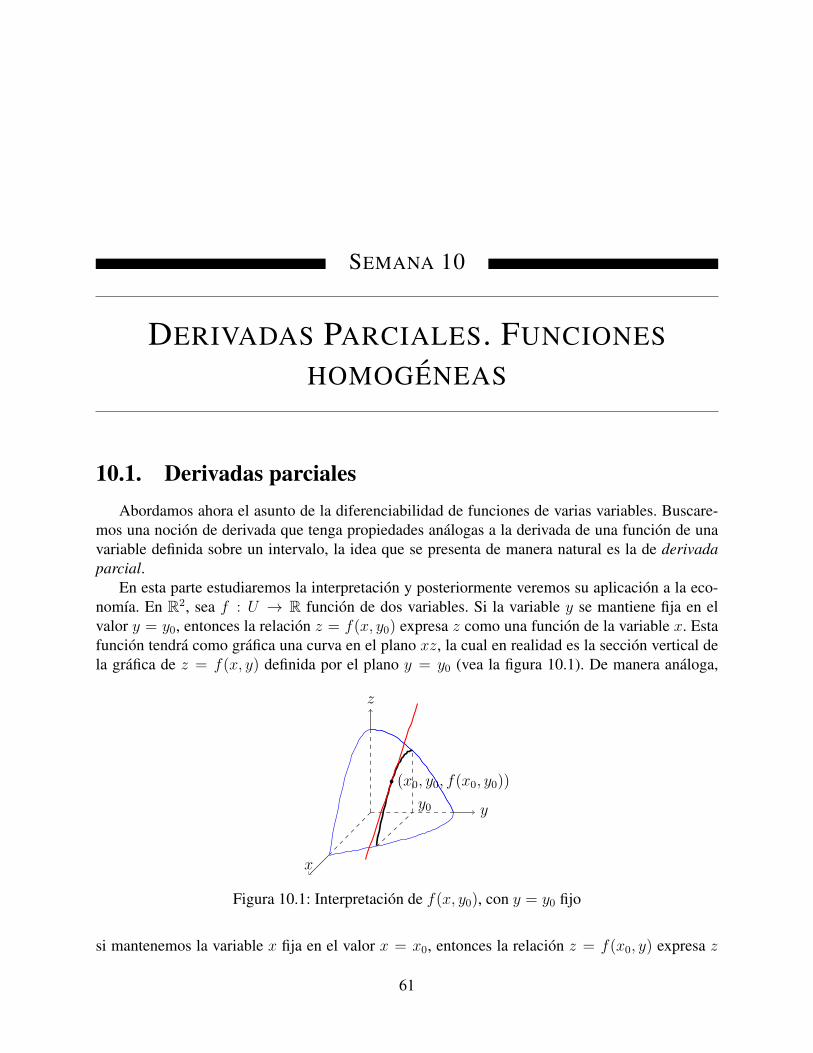
SEMANA 10
DERIVADAS PARCIALES. FUNCIONES
HOMOGENEAS
10.1. Derivadas parcialesAbordamos ahora el asunto de la diferenciabilidad de funciones de varias variables. Buscare-
mos una nocion de derivada que tenga propiedades analogas a la derivada de una funcion de unavariable definida sobre un intervalo, la idea que se presenta de manera natural es la de derivadaparcial.
En esta parte estudiaremos la interpretacion y posteriormente veremos su aplicacion a la eco-nomıa. En R2, sea f : U → R funcion de dos variables. Si la variable y se mantiene fija en elvalor y = y0, entonces la relacion z = f(x, y0) expresa z como una funcion de la variable x. Estafuncion tendra como grafica una curva en el plano xz, la cual en realidad es la seccion vertical dela grafica de z = f(x, y) definida por el plano y = y0 (vea la figura 10.1). De manera analoga,
y
z
x
(x0, y0, f(x0, y0))
y0
Figura 10.1: Interpretacion de f(x, y0), con y = y0 fijo
si mantenemos la variable x fija en el valor x = x0, entonces la relacion z = f(x0, y) expresa z
61
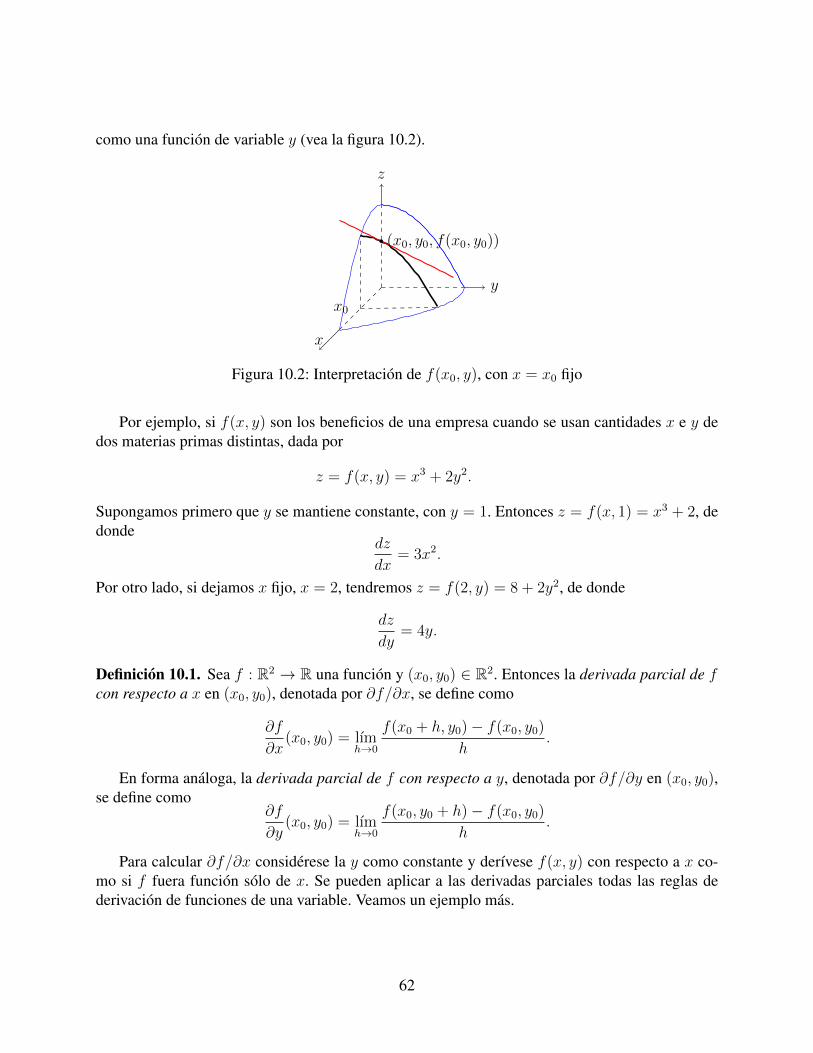
como una funcion de variable y (vea la figura 10.2).
y
z
x
(x0, y0, f(x0, y0))
x0
Figura 10.2: Interpretacion de f(x0, y), con x = x0 fijo
Por ejemplo, si f(x, y) son los beneficios de una empresa cuando se usan cantidades x e y dedos materias primas distintas, dada por
z = f(x, y) = x3 + 2y2.
Supongamos primero que y se mantiene constante, con y = 1. Entonces z = f(x, 1) = x3 + 2, dedonde
dz
dx= 3x2.
Por otro lado, si dejamos x fijo, x = 2, tendremos z = f(2, y) = 8 + 2y2, de donde
dz
dy= 4y.
Definicion 10.1. Sea f : R2 → R una funcion y (x0, y0) ∈ R2. Entonces la derivada parcial de fcon respecto a x en (x0, y0), denotada por ∂f/∂x, se define como
∂f
∂x(x0, y0) = lım
h→0
f(x0 + h, y0)− f(x0, y0)
h.
En forma analoga, la derivada parcial de f con respecto a y, denotada por ∂f/∂y en (x0, y0),se define como
∂f
∂y(x0, y0) = lım
h→0
f(x0, y0 + h)− f(x0, y0)
h.
Para calcular ∂f/∂x considerese la y como constante y derıvese f(x, y) con respecto a x co-mo si f fuera funcion solo de x. Se pueden aplicar a las derivadas parciales todas las reglas dederivacion de funciones de una variable. Veamos un ejemplo mas.
62

Ejemplo 10.2. Considerando la funcion siguiente:
f(x, y) =xy
x2 + y2.
Tenemos, usando la regla de derivacion de un cociente, que sus derivadas parciales son:
∂f
∂x=
y3 − x2y
(x2 + y2)2y
∂f
∂y=
x3 − y2x
(x2 + y2)2.
10.2. Regla de la CadenaLa regla de la cadena para la derivacion de funciones de una variable, puede extenderse a
funciones de dos o mas variables.
Teorema 10.3 (Regla de la cadena). Sean u y v funciones definidas por u = u(x, y) y v = v(x, y),tales que u y v son continuas y tienen derivadas parciales en (x, y). Sea, ademas, F una funcion deu y v que tiene derivadas parciales continuas en (u, v) = (u(x, y), v(x, y)). Entonces
∂F
∂x=∂F
∂u
∂u
∂x+∂F
∂v
∂v
∂x
y∂F
∂y=∂F
∂u
∂u
∂y+∂F
∂v
∂v
∂y.
F
ux
y
vx
y
Veamos unos ejemplos
Ejemplo 10.4. Considerando f(x, y) = exy y x = 2rt e y = 3r2t. Usando la regla de la cadena,Teorema 10.3, se tiene que
∂f
∂r= 18e6r3t2r2t2 y
∂f
∂θ= 12e6r3t2r3t.
En algunos casos las funciones con dos, tres o mas variables, cumplen que todas las variablesestan en funcion de un solo parametro, como en el siguiente ejemplo, supongamos queDA(x, y) =300− 20x2 + 30y representa la funcion demanda de un bien de marca A cuando se vende al precio
63

x dolares por unidad de dicho bien y el precio de la marca B es y. Ademas, a partir de t mesesdesde ahora, el precio de la marca A y de la marca B son
x(t) = 2 + 0.05t2 y y(t) = 2 + 0.1t.
Ahora, si quisieramos calcular la razon de cambio instantanea de la demanda con respecto del
tiempo. Ası tendriamos que DA(x(t), y(t)) = DA(t) entonces nos piden hallardDA
dt(t). Seguido
daremos un resultado que tambien extiende la regla de la cadena de funciones reales de variablereal, para poder manejar este tipo de situaciones
Teorema 10.5. Sean x y y funciones definidas por x = x(t) y y = y(t), tales que x e y soncontinuas y derivables en t. Sea, ademas, F una funcion de x e y que tiene derivadas parcialescontinuas en (x, y) = (x(t), y(t)). Entonces
dF
dt=∂F
∂x
dx
dt+∂F
∂y
dy
dt
F
x t
y t
Ejemplo 10.6. En el caso anterior tenemos que
dx
dt= 0.1t y
dy
dt= 0.1
luegodDA
dt= −40(2 + 0.05t2)0.1t+ 30(0.1).
10.3. Funciones HomogeneasDefinicion 10.7. Una funcion f : C ⊂ Rn → R, se dice que es homogenea de grado r ∈ R si estadefinida en su dominio maximo y se verifica que:
f(tx) = trf(x), para x ∈ C y t > 0.
Ejemplo 10.8. Consideremos la siguiente funcion f(x, y) =√
2x+ y, cuyo dominio es {(x, y) ∈R2; 2x + y ≥ 0} = {(x, y) ∈ R2; y ≥ −2x}. Observe que para todo (x, y) en el dominio de f ytodo t > 0 se tiene que
f(tx, ty) =√
2tx+ ty =√t√
2x+ y = t1/2f(x, y)
lo que nos dice que esta funcion es homogenea de grado 1/2.
64

Ejemplo 10.9. La funcion definida por f(x, y) =1
x2 + y2tiene por dominio al cono R2 \{(0, 0)}.
Seguido, para todo (x, y) en el dominio de f y todo t > 0 se tiene que
f(tx, ty) =1
(tx)2 + (ty)2=
1
t2(x2 + y2)= t−2 1
x2 + y2= t−2f(x, y).
Esto implica que f es una funcion homogenea de grado −2.
A continuacion presentamos un ejemplo de funcion no homogenea.
Ejemplo 10.10. Sea f : R2 → R una funcion definida por f(x, y) = x + y2. Supongamosque esta funcion es homogenea de grado r, entonces para cualquier t > 0 se debe cumplir quef(t(1, 0)) = trf((1, 0)) es decir t = tr de donde r = 1. Pero, tambien se debe cumplir quef(t(0, 1)) = trf((0, 1)) es decir t2 = tr de donde r = 2, lo cual es absurdo. Concluyendo que estafuncion no es homogenea.
Dada f : C ⊆ Rn → R una funcion homogenea de grado r y x ∈ C tenemos que para t = 1+hcon h > 0 f(tx) = f((1 + h)x) = (1 + h)rf(x). Ası f((1 + h)x) − f(x) = [(1 + h)r − 1]f(x)deduciendo que
∆f ≈ rhf(x)
lo cual podemos interpretar de la siguiente manera: si x aumenta en proporcion h entonces faumenta en proporcion rh.
La nocion de funcion homogenea esta relacionada con la idea de los, ası llamados en las cien-cias economicas, rendimientos a escala. En el caso de una funcion de produccion, diremos quehay unos rendimientos a escala constante si un incremento proporcional de K y de L tiene comoresultado un incremento de igual proporcionalidad en Q(K,L); esto es, si Q es una funcion ho-mogenea de grado 1, es decir Q(tK, tL) = tQ(K,L). Esto significa que, por ejemplo, doblandotanto el capital como la fuerza de trabajo se dobla la produccion. Si la funcion de produccion Qfuera homogenea de grado r > 1, entonces diremos que hay rendimientos a escala creciente. Porotra parte, si la funcion de produccion Q fuera de grado r < 1, diremos que hay rendimientos aescala decreciente.
Ejemplo 10.11. La funcion de produccion de Cobb-Douglas es definida por
Q(K,L) = AKαLβ
donde A es una constante positiva, es decir A > 0, L y K son las unidades de factor trabajo yfactor capital empleadas, α, β ∈ R, α, β > 0. El dominio de la funcion produccion es :
{(K,L) ∈ R2;K ≥ 0, L ≥ 0}.
que resulta ser un cono. Ademas, podemos probar que
Q(tK, tL) = tα+βQ(K,L).
Ası la funcion de produccion de Cobb-Douglas es homogenea de grado α + β. En particular siα + β = 1, dicha funcion tendra rendimientos a escala constante.
65

Teorema 10.12. Sean f y g son funciones homogeneas definidas en un mismo cono C ⊂ Rn.
1. Si f y g tienen el mismo grado r, entonces cualquier combinacion lineal de ambas es tambienuna funcion homogenea de grado r.
2. Si f tiene grado r y g tiene grado s, entonces el producto de ambas es una funcion homogeneade grado r + s.
3. Si f tiene grado r y g tiene grado s, entonces el cociente de ambas, cuando esta definido, esuna funcion homogenea de grado r − s.
Demostracion. Probaremos 1., dejando los otros dos ıtems como ejercicio. Sean x ∈ C y t > 0.Por ser f y g homogeneas de grado r, f(tx) = trf(x) y g(tx) = trg(x). Sean a, b ∈ R, luego
(af + bg)(tx) = af(tx) + bg(tx) = atrf(x) + btrg(x) = tr(af + bg)(x).
Ası, af + bg es una funcion homogenea de grado r.
Ejercicio 10.13. Estudiar la homogeneidad de las siguientes funciones
1. f(x, y) =x2(x+ y)
x2 + y2. 2. g(x, y) = (x+ y)ex/y.
Teorema 10.14. Sea f : A ⊂ R2 → R una funcion homogenea. Si f posee derivadas parciales entodo punto de A, entonces estas son funciones homogeneas de grado r − 1.
Demostracion. Como f es homogenea de grado r, tenemos que para todo (x, y) ∈ A y t > 0
f(tx, ty) = trf(x, y).
Derivando respecto de x ambos lados de la igualdad anterior, se tiene
t∂f
∂x(tx, ty) = tr
∂f
∂x(x, y).
Luego∂f
∂x(tx, ty) = tr−1∂f
∂x(x, y), es decir,
∂f
∂xes homogenea de grado r− 1. De manera analoga
se prueba para∂f
∂y.
10.4. El teorema de EulerPara las funciones homogeneas que admiten derivadas parciales continuas en su dominio se
puede obtener un importante resultado conocido con el nombre de Teorema de Euler (ası llamadapor el matematico suizo Leonard Euler (1707-1783)).
66

Teorema 10.15 (Teorema de Euler). Sea f : C ⊂ Rn → R una funcion, con derivadas parcialescontinuas. Entonces f es homogenea de grado r si, y solamente si,
rf(x) = x1∂f
∂x1
(x) + · · ·+ xn∂f
∂xn(x)
donde x = (x1, · · · , xn) ∈ C.
Demostracion. Por simplicidad, veamos la prueba para el caso de dos variables. Supongamos quef es homogenea de grado r y fijemos (x, y) ∈ C. Como f es homogenea de grado r entonces
0 = f(tx, ty)− trf(x, y), ∀ t > 0.
Por otro lado, como las derivadas parciales de f existen, podemos derivar respecto de t el ladoderecho de la ecuacion anterior y obtener
0 = x∂f
∂x(tx, ty) + y
∂f
∂y(tx, ty)− rtr−1f(x, y),
para todo t > 0. En particular, haciendo t = 1 en la ecuacion anterior, tenemos
0 = x∂f
∂x(x, y) + y
∂f
∂y(x, y)− rf(x, y),
es decir,
rf(x, y) = x∂f
∂x(x, y) + y
∂f
∂y(x, y).
Notemos que el caso n = 2, por el teorema de Euler, toda funcion homogenea de grado rcumple que:
rf(x, y) = x∂f
∂x(x, y) + y
∂f
∂y(x, y).
Ejemplo 10.16. Sea f : R2 → R una funcion homogenea de grado 3. Si se cumple que
∂f
∂x(x, y) = 6xy y
∂f
∂y(x, y) = 3x2,
usando el Teorema de Euler, Teorema 10.15 se tiene:
3f(x, y) = 6x2y + 3x2y.
Luego f(x, y) = 2x2y + x2y.
Ejercicio 10.17. Sea f : R2 → R una funcion homogenea de grado 2. Sabiendo f(1, 2) = 3 y∂f
∂x(1, 2) = 3, halle f(1/2, 1),
∂f
∂x(2, 4) y 2
∂f
∂x(2, 4) + 4
∂f
∂y(1, 2). (Sugerencia: use el teorema de
Euler).
67

SEMANA 11
MAXIMOS Y MINIMOS DE FUNCIONES DE
VARIAS VARIABLES
11.1. Derivadas parciales de segundo ordenSi f es una funcion de dos variables, entonces sus derivadas parciales fx y fy, cuando existen,
tambien son funciones de dos variables. Luego podemos considerar sus derivadas parciales
(fx)x, (fx)y, (fy)x, (fy)y,
las cuales se denominan segundas derivadas parciales de f . Por supuesto, esto no es algo exclusivode las funciones de dos variables, por ejemplo, para una funcion f de tres variables, podemosconsiderar, cuando existen,
(fx)x, (fx)y, (fx)z, (fy)x, (fy)y, (fy)z, (fz)x, (fz)y, (fz)z.
En general, si f es una funcion de n variables, utilizaremos la siguiente notacion
(fxi)xj = fxixj =∂
∂xj
(∂f
∂xi
)=
∂2f
∂xj∂xi,
donde xi y xj son las variables i-esima y j-esima de f . En particular, para n = 2,
(fx)x = fxx =∂
∂x
(∂f
∂x
)=∂2f
∂x2,
(fx)y = fxy =∂
∂y
(∂f
∂x
)=
∂2f
∂y∂x,
(fy)x = fyx =∂
∂x
(∂f
∂y
)=
∂2f
∂x∂y,
(fy)y = fyy =∂
∂y
(∂f
∂y
)=∂2f
∂y2.
68

Con esta notacion, fxy =∂2f
∂y∂xsignifica que primero derivamos f respecto de la variable x y
luego respecto de la variable y. Del mismo modo, fyx =∂2f
∂x∂ysignifica que primero derivamos f
respecto de la variable y y luego respecto de la variable x.
Ejemplo 11.1. Consideremos f : R2 → R, f(x, y) = x2 + 3y2 + 4x − 9y + 3. Calculemos susderivadas parciales de segundo orden, para esto, tenemos que sus derivadas parciales son
fx = 2x+ 4, fy = 6y − 9.
Luego, tenemosfxx = 2, fxy = 0, fyx = 0, fyy = 6.
Ejemplo 11.2. Consideremos f : R2 → R, f(x, y) = x ln(y) + yex. Tenemos que sus derivadasparciales son
∂f
∂x= ln(y) + yex,
∂f
∂y=x
y+ ex.
Luego,∂2f
∂x2= yex,
∂2f
∂x∂y=
1
y+ ex,
∂2f
∂y∂x=
1
y+ ex,
∂2f
∂y2= − x
y2.
Observe las derivadas parciales cruzadas, fxy y fyx, en los ejemplos anteriores. El hecho queambas sean iguales no es una coincidencia.
Teorema 11.3 (Schwarz). Sea f : A → R una funcion real de n variables, definida en A ⊂ Rn,para la cual existen sus derivadas parciales de segundo orden y estas son continuas. Entonces, paracualquier par de variables xi, xj de f , se cumple
∂2f
∂xi∂xj=
∂2f
∂xj∂xi.
En particular, para una funcion de dos variables f , el teorema de Schwarz establece que fxy =fyx, siempre y cuando estas sean continuas.
Observacion importante. En adelante, todas las funciones con las que trabajaremos cumpliran,por default, las condiciones del teorema de Schwarz. Por lo tanto, ya no haremos mencion de talescondiciones.
11.2. Maximos y mınimos globales y locales. Puntos crıticosLas definiciones de maximos y mınimos globales y locales son analogas a las definiciones para
el caso de funciones de una variable.
Definicion 11.4. Sea A ⊂ Rn y f : A→ R un funcion real de n variables. Diremos que P ∈ A esun maximo global de f , si f(P ) ≥ f(Q), para todo Q ∈ A. Del mismo modo, diremos que P esun mınimo global de f , si f(P ) ≤ f(Q), para todo Q ∈ A.
69

Figura 11.1: Maximos y mınimos locales para funciones de dos variables
Definicion 11.5. Sea A ⊂ Rn y f : A→ R un funcion real de n variables. Diremos que P ∈ A esun maximo local de f ,
f(P ) ≥ f(Q),
para todo Q “cercano” a P . Analogamente, P ∈ A es un mınimo local de f , si
f(P ) ≤ f(Q),
para todo Q “cercano” a P .
Comparemos las definiciones 11.4 y 11.5 con las definiciones 7.1 y 7.2, que son para el casode una variable.
Ejemplo 11.6. Sea f : R2 → R, f(x, y) = x2 + y2. Es claro que f(x, y) = x2 + y2 ≥ 0 = f(0, 0),luego, (0, 0) es un mınimo global de f .
En el caso de dos variables, los maximos y mınimos locales se comportan graficamente comoen la figura 11.1.
Recordemos que en el caso de una variable, un punto crıtico era aquel donde la derivada noexistıa o de existir, era nula. Sin embargo, la naturaleza de las funciones de varias variables com-plica el estudio de la “no existencia” de derivadas parciales. Por lo tanto, en adelante, estudiaremosunicamente funciones para las cuales existen todas sus derivadas parciales. Mas aun, restringire-mos aun mas las funciones objeto de nuestro estudio luego de ver el teorema de Schwarz.
Definicion 11.7. Sea f : A→ R una funcion para la cual existen sus derivadas parciales. Diremosque P es un punto crıtico de f si todas sus derivadas parciales son cero en P , es decir,
∂f
∂xi(P ) = 0, ∀i = 1, . . . , n.
70

Ejemplo 11.8. Cuando f : A → R, A ⊂ R2, es una funcion de dos variables, (a, b) ∈ A es unpunto crıtico cuando
∂f
∂x(a, b) =
∂f
∂y(a, b) = 0.
De manera analoga, para una funcion f de tres variables, (a, b, c) en el dominio de f es un puntocrıtico si
∂f
∂x(a, b, c) =
∂f
∂y(a, b, c) =
∂f
∂y(a, b, c) = 0.
Teorema 11.9. Sea f : A→ R una funcion para la cual existen sus derivadas parciales. Si f tieneun maximo o mınimo local en P = (a1, . . . , an) ∈ A, entonces P es un punto crıtico.
En adelante, por simplicidad, denotaremos fx y fy a las derivadas parciales de f , respecto de xy y, respectivamente. Del mismo modo, denotara la derivada parcial de f respecto de z en caso fsea de tres variables.
Ejemplo 11.10. Consideremos la funcion f : R2 → R, f(x, y) = x2 + y2. Por el ejemplo 11.6,(0, 0) es un mınimo global, luego es un punto crıtico por el teorema de Fermat. Por otro lado, lasderivadas parciales de f son
fx(x, y) = 2x, fy(x, y) = 2y.
De aquı, tenemos que un punto crıtico de f debe cumplir 2x = 0 y 2y = 0. Luego, (0, 0) es elunico punto crıtico de f .
Ejemplo 11.11. Consideremos la funcion f(x, y) = 2x2 + 4xy + 5y2 + 2x − y definida en todoR2. Derivando parcialmente y planteando las ecuaciones fx = 0 e fy = 0, tenemos
fx(x, y) = 4x+ 4y + 2 = 0 fy(x, y) = 4x+ 10y − 1 = 0.
De aquı, tenemos que el unico punto crıtico de f es (−1, 12).
Ejemplo 11.12. Consideremos la funcion f(x, y, z) = 4x2 + 4xz+ 5y2z2 + 3− z definida en todoR3. Derivando parcialmente y planteando las ecuaciones fx = 0, fy = 0 y fz = 0, tenemos
fx(x, y, z) = 8x+ 4z = 0, (11.1)fy(x, y, z) = 10yz2 = 0, (11.2)fz(x, y, z) = 4x+ 10y2z − 1 = 0. (11.3)
Dejamos al lector como ejercicio comprobar que(
14, 0,−1
2
)es el unico punto crıtico de f .
Ejercicio 11.13. Encuentre los puntos crıticos de f : R2 → R, f(x, y) = x2− 4x+ 2y2 + 4y+ 7.
Ejercicio 11.14. Verifique que f : R2 → R, f(x, y) = x2, posee una infinidad de puntos crıticos.
Ejercicio 11.15. Considere f : R2 → R, f(x, y) = x2 − y2. Verifique que (0, 0) es el unico puntocritico. ¿Es (0, 0) un maximo o mınimo local?
71

11.3. Optimizacion sin restriccionesRecordemos que en el caso de funciones de una variable, el hecho de que un punto sea un
punto crıtico no implicaba necesariamente que sea un mınimo o maximo relativo. En el caso defunciones de dos, o mas variables, tenemos este mismo comportamiento, es decir, un punto crıticono necesariamente es un maximo o mınimo relativo.
Ejemplo 11.16. Consideremos la funcion f : R2 → R, f(x, y) = x2 − y2. Como sus derivadasparciales son fx = 2x y fy = −2y, entonces el unico punto crıtico de f es (0, 0). Ahora, (0, 0) noes un punto maximo relativo pues, para todo x ∈ R, x 6= 0,
0 = f(0, 0) < f(x, 0) = x2.
Esto indica que (0, 0) podrıa ser un mınimo relativo, pero tampoco es el caso pues, para todoy ∈ R, y 6= 0,
0 = f(0, 0) > f(0, y) = −y2.
Este comportamiento lo tenemos en la figura 11.2.
En esta clase daremos un analogo a los criterios que vimos en el capıtulo 5 para determinarcuando un punto crıtico es un maximo o mınimo relativo. Comenzaremos dandole nombre a lospuntos que tienen un comportamiento similar al visto en el ejemplo anterior.
Definicion 11.17. Sea f : A → R una funcion real de n variables definida en A ⊂ Rn y seaP ∈ Rn un punto crıtico de f . Diremos que P es un punto de silla (o punto de ensilladura) si, paracualquier r > 0, existen Q1, Q2 ∈ A, con d(Q1.P ) < r y d(Q2, P ) < r, tales que
f(Q1) < f(P ) < f(Q2).
Ejercicio 11.18. Escriba la definicion 11.17 para funciones de dos y tres variables.
No siempre es simple detectar cuando un punto crıtico es maximo o mınimo relativo, o unpunto silla. Por ejemplo, consideremos f : R2 → R, f(x, y) = 4x− x2 − 2y2 − 4y − 7. Tenemosque fx = 4− 2x y fy = −4y− 4, luego, el unico punto crıtico de f es (2,−1). Por otro lado, paracualquier (x, y) ∈ R2,
f(x, y) = −(x2 − 4x+ 4)− 2(y2 + 2y + 1)− 1
= −(x− 2)2 − 2(y + 1)2 − 1
≤ −1 = f(2,−1),
es decir, (2,−1) es un maximo absoluto de f .Consideraremos por separado los casos de funciones de dos y tres variables, y daremos resulta-
dos analogos a los del capıtulo 5 para detectar cuando un punto crıtico es maximo, mınimo o puntode silla.
72

Figura 11.2: (0, 0) es un punto de silla de f(x, y) = x2 − y2
Optimizacion de funciones de dos variablesDada una funcion f : R2 → R para la cual existen sus derivadas parciales de segundo orden.
Dado (a, b) ∈ R2, definimos la matriz Hessiana H(a, b) como
H(a, b) =
[fxx(a, b) fxy(a, b)fyx(a, b) fyy(a, b)
],
y el Hessiano de f en (a, b) como
∆(a, b) = detH(a, b) = fxx(a, b)fyy(a, b)− fxy(a, b)fyx(a, b).
El siguiente teorema es el analogo para funciones de dos variables del criterio de la segunda deri-vada.
Teorema 11.19 (Criterio de la segunda derivada). Sea f : R2 → R una funcion cuyas segundasderivadas parciales existen y son continuas. Sea (a, b) un punto crıtico de f ,
1. Si ∆(a, b) > 0, entonces
a) si fxx(a, b) > 0, entonces (a, b) es un mınimo relativo de f ,
b) si fxx(a, b) < 0, entonces (a, b) es un maximo relativo de f .
2. Si ∆(a, b) < 0, entonces (a, b) es un punto de silla de f .
En cualquier otro caso, el criterio no es concluyente.
Intepretamos el criterio de la segunda derivada de la siguiente manera: si el Hessiano ∆(a, b)es positivo, entonces la superficie se curva de la misma forma en todas las direcciones:
73

hacia abajo si fxx(a, b) < 0, lo que da lugar a un maximo relativo;
hacia arriba si fxx(a, b) > 0, lo que da lugar a un mınimo relativo.
Por otro lado, si el Hessiano ∆(a, b) es negativo, entonces la superficie se curva hacia arriba enalgunas direcciones y hacia abajo en otras, de modo que tenemos un punto de silla en (a, b).
Ejemplo 11.20. Consideremos f : R2 → R, f(x, y) = x2 + y2. Sabemos que (0, 0) es el unicopunto crıtico. Tenemos que la matriz Hessiana de f en (0, 0) es
H(0, 0) =
[fxx(0, 0) fxy(0, 0)fyx(0, 0) fyy(0, 0)
]=
[2 00 2
],
y, por lo tanto, ∆(0, 0) = 4 > 0. Como fxx(0, 0) = 2 > 0, entonces por el criterio de la segundaderivada, (0, 0) es un mınimo relativo de f .
Ejercicio 11.21. Determine los valores extremos relativos de la funcion f(x, y) = xy− x2− y2−2x− 2y + 4, (x, y) ∈ R2.
Solucion. Calculamos las derivadas parciales de f para obtener sus puntos crıticos. Tenemos
fx = y − 2x− 2 y fy = x− 2y − 2,
luego, (−2,−2) es el unico punto crıtico de f . Calculamos ahora la matriz Hessiana de f ,
H(−2,−2) =
[−2 11 −2
],
y, por lo tanto ∆(−2,−2) = (−2)(−2)− (1)2 = 3 > 0. Como fxx(−2,−2) = −2 < 0, entoncespor el criterio de la segunda derivada, f tiene un maximo relativo en (−2,−2). El valor de f eneste punto es f(−2,−2) = 8. Vea la figura 11.3 para el grafico de f .
Ejemplo 11.22. Consideremos f : R2 → R, f(x, y) = x2 − y2. Sabemos que el unico puntocrıtico de f es (0, 0). Ası,
H(0, 0) =
[fxx(0, 0) fxy(0, 0)fyx(0, 0) fyy(0, 0)
]=
[2 00 −2
],
y, por lo tanto, ∆(0, 0) = −4 < 0. Por el criterio de la segunda derivada, (0, 0) es un punto de sillade f .
Ejercicio 11.23. Una fabrica utiliza los insumos A y B en su produccion. Cada unidad de Acuesta $ 4, mientras que cada unidad de B cuesta $ 3. Se ha determinado que ademas del gasto enla compra de los insumos A y B, se gasta y3 + x2− 6xy+ 600 dolares si se utilizan x unidades deA y y unidades de B.
1. Modele la funcion costo total y determine las cantidades de cada insumo de modo que seminimice este costo. Justifique su respuesta por medio del uso del Hessiano.
74

Figura 11.3:
2. Considerando la funcion de ingreso I(x, y) = −6xy+24x+y3−y2 +15y+1464, determinelas cantidades de cada insumo de modo que se maximice la utilidad. Justifique su respuestadebidamente.
Solucion. El costo total esta dado por
C(x, y) = 4x+ 3y + (y3 + x2 − 6xy + 600) = x2 − 6xy + 4x+ y3 + 3y + 600.
Derivando parcialmente tenemos Cx = 2x− 6y + 4, Cy = −6x+ 3y2 + 3, luego, un punto crıtico(x, y) de C debe satisfacer
Cx = 2x− 6y + 4 = 0, Cy = −6x+ 3y2 + 3 = 0.
Despejando x en Cx = 0 tenemos x = 3y − 2 y reemplazando en Cy = 0 obtenemos
y2 − 2(3y − 2) + 1 = y2 − 6y + 5 = 0,
que tiene y = 1 y y = 5 como soluciones. Ası, los puntos crıticos de C son (1, 1) y (13, 5). Ahora,la matriz Hessiana de C es
H(x, y) =
[Cxx CxyCxy Cyy
]=
[2 −6−6 6y
]y el Hessiano es ∆(x, y) =
∣∣H(x, y)∣∣ = 12y − 36 = 12(y − 3). Para el primer punto crıtico
∆(1, 1) = 12(−2) < 0 que implica que (1, 1) es un punto silla. Para el segundoCxx(13, 5) = 2 > 0y ∆(13, 5) = 12(2) > 0, luego (13, 5) es un mınimo relativo del costo.
75

La utilidad se determina por
U(x, y) = I(x, y)− C(x, y)
= (−6xy + 24x+ y3 − y2 + 15y + 1464)− (x2 − 6xy + 4x+ y3 + 3y + 600)
= 20x− y2 + 12y + 864− x2.
Derivando parcialmente tenemos Ux = 20− 2x = 2(10− x) y Uy = 12− 2y = 2(6− y). De lasecuacionesUx = Uy = 0 obtenemos x = 10, y = 6, esto es, un unico punto crıtico (x, y) = (10, 6).La matriz Hessiana de U es ahora
H(x, y) =
[Uxx UxyUxy Uyy
]=
[−2 00 −2
]y el Hessiano ∆(x, y) = 4. Luego Uxx(10, 6) = −2 < 0 y ∆(10, 6) > 0, lo que corresponde a unmaximo relativo.
Optimizacion de funciones de tres variablesProcedemos de manera similar que el caso de dos variables. Dada una funcion f : R3 → R,
para la cual existen sus derivadas parciales de segundo orden, y (a, b, c) ∈ R3, la matriz Hessianade f se define como
H(a, b, c) =
fxx(a, b, c) fxy(a, b, c) fxz(a, b, c)fyx(a, b, c) fyy(a, b, c) fyz(a, b, c)fzx(a, b, c) fzy(a, b, c) fzz(a, b, c)
,y el Hessiano de f en (a, b, c) como
∆(a, b, c) = detH(a, b, c).
La matriz Hessiana es la matriz de segundas derivadas parciales de f , y de esta, podemos extraer3 sub-matrices: [[fxx] fxy
fyx fyy
]fxzfyz
fzx fzy fzz
,de la siguiente manera
H1 =[fxx], H2 =
[fxx fxyfyx fyy
], H3 =
fxx fxy fxzfyx fyy fyzfzx fzy fzz
.Las matricesH1,H2 yH3 se denominan menores principales de la matriz Hessiana de f . Si ademasdenotamos
D1 = detH1 = fxx, D2 = detH2 = fxxfyy − fxyfyx, D3 = detH3,
tenemos el criterio de la segunda derivada para funciones de tres variables.
76

Teorema 11.24 (Criterio de la segunda derivada). Sea f : R3 → R una funcion cuyas segundasderivadas parciales existen y son continuas. Sea (a, b, c) un punto crıtico de f ,
1. si D1(a, b, c) > 0, D2(a, b, c) > 0 y D3(a, b, c) > 0 entonces (a, b, c) es un mınimo relativode f ,
2. si D1(a, b, c) < 0, D2(a, b, c) > 0 y D3(a, b, c) < 0 entonces (a, b, c) es un maximo relativode f ,
3. si D1(a, b, c) 6= 0, D2(a, b, c) 6= 0, D3(a, b, c) 6= 0 y no se cumplen los dos casos anteriores,entonces (a, b, c) es un punto de silla de f .
En cualquier otro caso, el criterio no es concluyente.
Ejercicio 11.25. Encuentre y clasifique los puntos crıticos de
f(x, y, z) = x2 + y2 + 7z2 − xy − 3yz.
Solucion. Derivando e igualando a cero las derivadas parciales de f , tenemos
fx = 2x− y = 0, fy = 2y − x− 3z = 0, fz = 14z − 3y = 0.
De aquı, tenemos que (0, 0, 0) es el unico punto crıtico de f . Ahora, calculando la matriz Hessianade f nos da
H(x, y, z) =
2 −1 0−1 2 −30 −3 14
,de donde D1(0, 0, 0) = 2 > 0, D2(0, 0, 0) = 3 > 0 y D3(0, 0, 0) = 24 > 0. Por el criterio de lasegunda derivada, (0, 0, 0) es un mınimo relativo de f .
77
SEMANA 12
OPTIMIZACION CON RESTRICCIONES
Sea U(x, y) la funcion de utilidad de una empresa, que depende de la cantidad de dos insumos,x, y, que esta utiliza. Serıa ideal considerar el maximo sobre todas las posibles elecciones de x e y,sin embargo, lo usual es estar sujeto a una restriccion presupuestaria, de la forma p1x+ p2y = P0,donde p1, p2 son los precios de los insumos x e y, respectivamente, y P0 es el presupuesto total dela empresa. Estamos interesados por tanto en encontrar el maximo de la funcion U , pero no sobretodo su dominio, sino solamente sobre los pares (x, y) que satisfacen la restriccion presupuestaria.En esta clase, abordaremos este problema en general, y estudiaremos metodos para resolverlo. Co-menzaremos definiendo de manera precisa el problema para el caso de funciones de dos variables.
Consideremos f : A ⊂ R2 → R. Dado B ⊂ R2, queremos determinar el maximo o elmınimo de los valores f(x, y), sujetos a la restriccion de tener (x, y) ∈ B. Luego, diremos que(x0, y0) ∈ A ∩B es un maximo de f restringido a B, si para cualquier (x, y) ∈ A ∩B,
f(x0, y0) ≥ f(x, y).
Del mismo modo, (x0, y0) ∈ A ∩ B es un mınimo de f restringido a B, si para cualquier (x, y) ∈A ∩B,
f(x0, y0) ≤ f(x, y).
Existen definiciones analogas para maximo y mınimo relativo de f restringido a B.En general, el mınimo o maximo restringido no es el mismo que el mınimo o maximo de unafuncion.
Ejemplo 12.1. Sea f : R2 → R, f(x, y) = x2 + y2, sujeto a la restriccion de (x, y) ∈ B, dondeB = {(x, y) ∈ R2 : x+y = 1}. Deseamos hallar el mınimo de f restringido aB. Dado (x, y) ∈ B,x+ y = 1 y, por tanto, y = 1− x. Luego podemos reemplazar en la definicion de f , teniendo
f(x, y) = f(x, 1− x) = x2 + (1− x)2 = 2x2 − 2x+ 1 = g(x),
donde g es una funcion de una variable. Aplicando los metodos vistos en el capıtulo 5, tenemosque x0 = 1
2es el unico punto crıtico de g el cual es un mınimo. Luego y0 = 1
2y (x0, y0) = (1
2, 1
2)
78

es el mınimo de f restringido a B = {(x, y) : x+ y = 1}. En este caso f(x0, y0) = 12.
Por otro lado, el mınimo global (sin restricciones) de f esta en el punto (x1, y1) = (0, 0) yf(x1, y1) = 0.
Observe que tanto el ejemplo anterior, como el ejemplo dado al inicio de la clase, tuvimosuna restriccion de la forma φ(x, y) = 0. Este tipo de restricciones se denominan restricciones deigualdad y enfocaremos nuestro esfuerzo en resolver este tipo de problemas restringidos.
Comenzaremos definiendo la herramienta principal para esto.
Definicion 12.2. Sea f : A → R y φ : A → R funciones de dos variables. Definimos la funcionde Lagrange, asociada al problema de maximizar o minimizar f restringida a la condicion φ = 0,como
L(λ, x, y) = f(x, y) + λφ(x, y).
donde λ ∈ R y (x, y) ∈ A. Observe que comoA ⊂ R2, entonces L es una funcion de tres variables.
La importancia de la funcion de Lagrange queda en evidencia en el siguiente teorema.
Teorema 12.3. Sea (λ0, x0, y0) un maximo (respectivamente, mınimo) relativo de L, entonces(x0, y0) es un maximo (respectivamente, mınimo) relativo de f restringido a φ = 0.
Demostracion. Consideraremos el caso cuando (λ0, x0, y0) es un mınimo (absoluto) de L, el casogeneral es analogo. Para cualquier (λ, x, y) ∈ R× A tenemos
L(λ0, x0, y0) ≤ L(λ, x, y). (12.1)
En particular, para cualquier t ∈ R, tenemos
L(λ0, x0, y0) ≤ L(λ0 + t, x0, y0) = L(λ0, x0, y0) + tφ(x0, y0),
es decir, 0 ≤ tφ(x0, y0), para cualquier t ∈ R. Esto implica que φ(x0, y0) = 0, es decir, (x0, y0)satisface la restriccion φ = 0.
Luego, la ecuacion (12.1) adquiere la forma
f(x0, y0) = L(λ0, x0, y0) ≤ L(λ, x, y) = f(x, y) + λφ(x, y),
para cualquier (x, y) ∈ A y λ ∈ R. En particular, para cualquier (x, y) ∈ A que satisface φ(x, y) =0, tenemos
f(x0, y0) ≤ f(x, y) + λφ(x, y) = f(x, y).
Es decir, (x0, y0) es un mınimo del problema restringido.
Ejemplo 12.4. Sea U : A → R una funcion de utilidad, donde A = {(x, y) ∈ R2 : x >0, y > 0}. Consideremos Ux(x, y) > 0 y Uy(x, y) > 0, para todo (x, y) ∈ A, y p1 > 0, p2 > 0 yP0 > 0 constantes positivas. Buscamos maximizar U(x, y), sujeto a la restriccion presupuestariap1x+ p2y = P0, es decir, φ(x, y) = P0− (p1x+ p2y) = 0. Observe que φ no tiene puntos crıticos.
79

Supongamos que (x0, y0) ∈ A sea un maximo de U restringido a φ = 0. Luego, por el teore-ma ??, existe un unico multiplicador de Lagrange λ0, de modo que (λ0, x0, y0) es un punto crıticode L, es decir,
Lλ(λ0, x0, y0) = φ(x0, y0) = 0, (12.2)Lx(λ0, x0, y0) = Ux(x0, y0) + λ0φx(x0, y0) = Ux(x0, y0)− λ0p1 = 0, (12.3)Ly(λ0, x0, y0) = Uy(x0, y0) + λ0φy(x0, y0) = Uy(x0, y0)− λ0p2 = 0. (12.4)
La ecuacion (12.2) establece que (x0, y0) cumple la restriccion presupuestaria. Juntando lasecuaciones (12.3) y (12.4), tenemos
λ0 =Ux(x0, y0)
p1
=Uy(x0, y0)
p2
.
Observe queUx(x0, y0)
p1
yUy(x0, y0)
p2
son las utilidades marginales por unidad monetaria de ambos
bienes. Luego, hemos probado que el optimo de la utilidad se da cuando las utilidades marginalespor unidad monetaria de cada bien son iguales. Cuando esto ocurre, se dice que el consumidor estaen equilibrio.
Para detectar que puntos crıticos de L son maximos o mınimos relativos del problema restrin-gido, usaremos matriz Hessiana de L.
Definicion 12.5. La matriz Hessiana de la funcion de Lagrange L(λ, x, y) = f(x, y) + λφ(x, y)tiene la forma 0 φx φy
φx Lxx Lxyφy Lxy Lyy
.Llamaremos al Hessiano de la funcion de Lagrange L como Hessiano orlado, y lo denotaremospor
∆(λ, x, y) = det
0 φx φyφx Lxx Lxyφy Lxy Lyy
.Ası, tenemos el criterio de la segunda derivada para el problema restringido.
Teorema 12.6. Sea (λ0, x0, y0) un punto crıtico de la funcion de Lagrange asociada al problemade optimizar f restringido a φ = 0. Luego,
1. si ∆(λ0, x0, y0) > 0, entonces (x0, y0) es un maximo relativo de f sujeto a la restriccionφ = 0;
2. si ∆(λ0, x0, y0) < 0, entonces (x0, y0) es un mınimo relativo de f sujeto a la restriccionφ = 0.
Ejemplo 12.7. Determine el mınimo o maximo de: f(x, y) = 3x2 +xy+4y2, sujeto a la condicionφ(x, y) = 3x+ y − 6 = 0.
80

Solucion. La funcion de Lagrange es L(λ, x, y) = 3x2 + xy + 4y2 + λ(3x+ y − 6). Para obtenerlos puntos crıticos de L, derivamos y consideramos el sistema
Lλ = 3x+ y − 6 = 0,
Lx = 6x+ y + 3λ = 0,
Ly = x+ 8y + λ = 0,
que nos da el punto crıtico (λ0, x0, y0) =
(−47
12,23
12,1
4
). Por otro lado, el Hessiano orlado es
∆(λ0, x0, y0) = det
0 3 13 6 11 1 8
= −72 < 0,
lo que nos indica que(
23
12,1
4
)es un mınimo relativo.
Ejemplo 12.8. La funcion de produccion de una empresa esta dada por
P (x, y) = 260x+ 150y + 2xy − 2x2 + y2,
donde x e y son las cantidades de artıculos de los productos A y B. Suponiendo que los gastos parafabricar dichos productos son $2 y $3, respectivamente, y que la empresa puede gastar unicamente$450; determine la produccion maxima.
Solucion. Construyendo la funcion de Lagrange, tenemos
L(λ, x, y) = 260x+ 150y + 2xy − 2x2 + y2 + λ(450− 2x− 3y).
Luego, derivando e igualando a cero, tenemos el sistema
Lλ = 450− 2x− 3y = 0,
Lx = 260 + 2y − 4x− 2λ = 0,
Ly = 150 + 2x+ 2y − 3λ = 0,
de donde obtenemos el punto crıtico (160, 45, 120). Por otro lado, el Hessiano orlado es
∆(λ0, x0, y0) = det
0 −2 −3−2 −4 2−3 2 2
= 52 > 0,
Luego, (45, 120) es maximo relativo del problema restringido.
81

Ejemplo 12.9. Sean C,Q : R2+ → R, donde R2
+ = {(x, y) ∈ R2 : x ≥ 0, y ≥ 0} (note que esteconjunto no es abierto) funciones de costo y produccion de un fabricante, de las formas
C(x, y) = Pxx+ Pyy, Q(x, y) = kxαyβ, x ≥ 0, y ≥ 0
(una funcion de presupuesto y una funcion de tipo Cobb-Douglas), con
1. Px > 0, Py > 0 constantes que definen C;
2. k > 0, 0 < α < 1, 0 < β < 1 constantes que definen Q.
Minimizamos entonces los costos del fabricante sujetos a una restriccion de produccion
mınC(x, y) sujeto a x ≥ 0, y ≥ 0, Q(x, y) = Q0 > 0.
El optimo no puede darse en un punto (x, y) con x = 0 o y = 0; el problema se reduce a
mınC(x, y) sujeto a x > 0, y > 0, Q(x, y) = Q0.
Para resolver este problema, formamos el lagrangiano
L(λ, x, y) = C(x, y) + λ(Q(x, y)−Q0).
Las condiciones de primer orden son
Lλ = Q(x, y)−Q0,
Lx = Cx + λQx, Ly = Cy + λQy.
Esto nos daCxQx
=CyQy
= −λ.
En particular, esto implica que λ < 0. Este sistema nos da
kxαyβ = Q0,Px
kαxα−1yβ=
Pykβxαyβ−1
= −λ.
Introduciendo la primera ecuacion en la segunda igualdad
PxαQ0
x =PyβQ0
y,
de donde x =αPyβPx
y = µ−1y, donde µ =βPxαPy
. Reemplazando en la primera ecuacion
kµ−αyα+β = k(µ−1y)αyβ = Q0,
82

de donde
y =(Q0
kµα) 1α+β
=(Q0
k
) 1α+β
µα
α+β , x =(Q0
k
) 1α+β
µα
α+β−1 =
(Q0
k
) 1α+β
µ−β
α+β
y λ0 < 0. Resumiendo, obtenemos el candidato a optimo en el punto (x0, y0) con
x0 =(Q0
k
) 1α+β(αPyβPx
) βα+β
, y0 =(Q0
k
) 1α+β(βPxαPy
) αα+β
.
Formamos ahora el hessiano orlado
H(λ, x, y) =
∣∣∣∣∣∣0 Qx Qy
Qx Lxx LxyQy Lyx Lyy
∣∣∣∣∣∣ =
∣∣∣∣∣∣0 Qx Qy
Qx λQxx λQxy
Qy λQxy λQyy
∣∣∣∣∣∣(esto pues Cxx = Cxy = Cyx = Cyy = 0). Entonces
H(λ, x, y) = −λ(Q2xQyy − 2QxQyQxy +Q2
yQxx
).
AhoraQx = αxα−1yβ > 0, Qy = βxαyβ−1 > 0
yQxx = α(α− 1)xα−2yβ < 0, Qxy = αβxα−1yβ−1 > 0,
Qyy = β(β − 1)xαyβ−2 < 0,
entoncesH(λ0, x0, y0) < 0,
lo que implica que tenemos un mınimo en el punto (x0, y0) (aquı solo usamos que (x0, y0) ∈ U yλ0 < 0).
83

SEMANA 13
LA INTEGRAL INDEFINIDA
En adelante, I denotara un intervalo en R.
Definicion 13.1. Dada una funcion f : I → R definida en un intervalo, decimos que F : I → Res una primitiva o antiderivada de f si F es derivable en I y para todo x ∈ I , F ′(x) = f(x).
Ejemplos. .
1. Sea f : R→ R, f(x) = x. La funcion F : R→ R, F (x) = 12x2 es una primitiva de f , pues
F ′(x) =1
2· 2x = f(x).
2. Sea f : R → R, f(x) = x2 + 1. Una primitiva de f es F0 : R → R, F0(x) =x3
3+ x.
Otras primitivas son por ejemplo: F1 : R → R, F1(x) =x3
3+ x + 1; F2 : R → R,
F2(x) =x3
3+ x+ 2, etc.
3. Sea f : R → R, f(x) = 3√x+ 5. La funcion F : R → R, F (x) = 2(x + 5)
32 es una
primitiva de f , pues
F ′(x) = 2 · 3
2(x+ 5)
12 = f(x).
Observacion. A veces la primitiva no esta definida en todo el dominio de la funcion original, perorestringiendo la funcion a un subintervalo es a veces posible definir la primitiva. Por ejemplo, sif : R→ R se define por f(x) = 1/x para x 6= 0 y f(0) = 0, entonces f no tiene una primitiva entodo R. Sin embargo, para los subintervalos x > 0 la primitiva es lnx y para x < 0 la primitiva esln(−x).
84

Esta claro que si F1 es una primitiva de f en I , esto es F ′1(x) = f(x) para x ∈ I , entonces paracualquier constante C, la funcion F2(x) = F1(x) + C es tambien primitiva de f , pues
F ′2(x) = F ′1(x) + C ′ = F ′1(x) = f(x)
para todo x ∈ I . El siguiente resultado nos dice que esta es la unica forma de fabricar otrasprimitivas de una funcion dada.
Teorema 13.2. Si F1 y F2 son dos primitivas de f : I → R, entonces F1 = F2 + C donde C esuna constante.
Demostracion. Vemos que (F1 − F2)′(x) = F ′1(x) − F ′2(x) = f(x) − f(x) = 0, para x ∈ I .Eentonces F1 − F2 es una funcion cuya derivada se anula, de donde F1 − F2 = C donde C esconstante. Concluimos que F1 = F2 + C.
Por lo anterior, si F es una primitiva de f , la integral indefinida de f se denota por∫f(x) y se
escribe ∫f(x) dx = F (x) + C,
donde C es una constante arbitraria.Del teorema anterior tenemos que la definicion no depende de la funcion F que escojamos,
siempre y cuando F sea una primitiva. En efecto, si∫f(x) dx = F1(x) + C1 y
∫f(x) dx =
F2(x) +C2 como F ′1(x) = F ′2(x) = f(x) obtenemos F1(x) = F2(x) +C3 por el teorema anterior.Entonces
F1(x) + C1 = F2(x) + C3 + C1︸ ︷︷ ︸constante
= F2(x) + C2
porque la suma de constantes arbitrarias es constante.
Proposicion 13.3. Si f es una funcion derivable en I , entonces f ′ admite primitiva y∫f ′(x)dx = f(x) + C.
Observacion. La constante C puede ser calculada si se imponen condiciones a la primitiva. Porejemplo, si f(x) = x y exigimos que la primitiva F cumpla que F (0) = 1, entonces F (x) =x2/2 + 1.
13.1. Primeras integrales. Propiedades algebraicasEjemplo 13.4. Sabemos que para todo α
(xα)′ = αxα−1,
por lo que ∫αxα−1dx = xα + C,
85

donde C es constante. Dado α 6= −1, como( xα+1
α + 1
)′=
1
α + 1
(xα+1
)′= xα
escribimos ∫xαdx =
xα+1
α + 1+ C,
donde C es constante.
Ejemplo 13.5. Dado x en un intervalo que no contiene al cero, como(ln |x|
)′=
1
x, entonces∫
dx
x= ln |x|+ C.
Esto corresponde al caso α = −1 del ejemplo anterior.
Ejemplo 13.6. Como(3
5x5 − x3 − 5x
)′= 3x4 − 3x2 − 5 para todo x ∈ R, entonces∫
(3x4 − 3x2 − 5)dx =3
5x5 − x3 − 5x+ C.
donde C es constante.
Del mismo modo que construimos una tabla de derivadas, ahora tenemos una tabla de integralesindefinidas.
f(x)
∫f(x)dx Restricciones
0 C1 x+ C
xαxα+1
α + 1+ C α 6= −1
1
xln |x|+ C
ex ex + C
axax
ln a+ C a > 0, a 6= 1
cos(x) sen(x) + Csen(x) − cos(x) + C
1
x2 + 1arctanx+ C
Teorema 13.7. Si f, g : I → R poseen primitivas y k ∈ R es constante, entonces
1.∫
(f(x) + g(x)) dx =
∫f(x) dx+
∫g(x) dx
86

2.∫k · f(x) dx = k ·
∫f(x) dx
Demostracion. Probaremos solo la primera igualdad. Si F es una primitiva de f y G una primitivade g entonces (F (x) +G(x))′ = F ′(x) +G′(x) = f(x) + g(x), lo que implica que F +G es unaprimitiva de f + g. Esto prueba que∫
(f(x) + g(x)) dx = F (x) +G(x) + C =
∫f(x) dx+
∫g(x) dx.
La constante C que deberıa hacer diferir las formulas, la obviamos para recien colocarla al final dela integracion que realizamos.
Ejemplo 13.8. Si el ritmo de produccion en una empresa es de R(t) = −3t2 + 18t+ 12 cientos deunidades por hora, donde 0 ≤ t ≤ 4, siendo t el numero de horas desde el inicio de la producciondel dıa, determine la produccion Q(t) si se inicia la jornada con produccion cero.
Solucion. De la tabla de integrales y el teorema anterior obtenemos
Q(t) =
∫R(t) dt =
∫(−3t2 + 18t+ 12)dt =
∫−3t2 dt+
∫18t dt+
∫12 dt
= −3
∫t2 dt+ 18
∫t dt+ 12
∫1 dt = −3
t3
3+ 18
t2
2+ 12t+ C
= −t3 + 9t2 + 12t+ C.
Como Q(0) = C = 0 concluimos que Q(t) = −t3 + 9t2 + 12t para 0 ≤ t ≤ 4.
Ejemplo 13.9. Se sabe que el costo marginal de manufactura de x metros cuadrados de tela encierta fabrica viene dado por CMg(x) = 3 + 2x− 3
2
√x (en dolares por metro cuadrado). Modele
la funcion costo de produccion si se sabe que el costo de manufacturar un metro cuadrado de telaes de 10 dolares.
Solucion. Sabemos que CMg(x) = C ′(x), de donde
C(x) =
∫ (3 + 2x− 3
2
√x
)dx
=
∫3dx+
∫2xdx− 3
2
∫ √xdx
= 3x+ x2 − x3/2 +K,
siendo K constante. De la condicion inicial C(1) = 10 se tiene que C(1) = 3 +K = 10, de dondeK = 7. Por lo tanto la funcion costo es C(x) = 3x+ x2 − x3/2 + 7.
87

13.2. Metodos de integracion: sustitucionTeorema 13.10 (Regla de sustitucion o cambio de variable). Sean I, J intervalos, g : I → Rderivable, f : J → R continua tal que g(I) ⊂ J y F una primitiva de f , entonces∫
f(g(x))g′(x) dx = F (g(x)) + C.
Demostracion. De la regla de la cadena se tiene que
d
dxF (g(x)) = F ′(g(x))g′(x) = f(g(x))g′(x)
quiere decir que F (g(x)) es una primitiva de f(g(x))g′(x). Por lo tanto∫f(g(x))g′(x) dx = F (g(x)) + C.
Observacion. Para abreviar la regla de sustitucion es costumbre realizar lo siguiente: denotamosu = g(x) y entonces du = g′(x) dx. Introduciendo estos cambios en la integral vemos que∫
f(g(x)
)g′(x) dx =
∫f(u) du = F (u) + C = F
(g(x)
)+ C.
Ejemplo 13.11. Muestre que∫eax dx =
1
aeax + C donde a 6= 0.
Solucion. Haciendo u = ax vemos que du = adx y reemplazando en la integral obtenemos∫eax dx =
1
a
∫eaxa dx =
1
a
∫eu du =
1
aeu + C =
1
aeax + C
Ejemplo 13.12. Calcule∫
(x2 − 1)32x dx.
Solucion. Primero reconocemos (x2 − 1)′ = 2x. Por ello, definiendo u = x2 − 1, tenemos quedu = 2x dx y luego∫
(x2 − 1)32x dx =
∫u3 du =
u4
4+ C =
(x2 − 1)4
4+ C,
donde C es constante.
Ejemplo 13.13. Determine la regla de correspondencia de la funcion f : R → R cuya rectatangente tiene pendiente igual a xex2 − e2x para todo x ∈ R, y cuyo grafico pasa por el punto(0, 1).
88

Solucion. Como la pendiente de la tangente es la derivada entonces f ′(x) = xex2 − e2x, luego
f(x) =
∫(xex
2 − e2x) dx =
∫xex
2
dx−∫e2x dx,
=1
2
∫ex
2
2x dx− 1
2
∫e2x2 dx =
1
2ex
2 − 1
2e2x + C.
Luego, de la condicion f(0) = 1 verificamos que 1 = f(0) = 1/2− 1/2 + C lo cual implica queC = 1. Por lo tanto
f(x) =1
2ex
2 − 1
2e2x + 1.
13.3. Integracion por partesTeorema 13.14. (Integracion por Partes) Si F y G son primitivas de f, g : I → R, entonces∫
F (x)g(x) dx = F (x)G(x)−∫f(x)G(x) dx
Demostracion. Esta es una consecuencia de la regla del producto para derivadas.
Observacion. Si denotamos por u = F (x) y v = G(x) obtenemos diferenciales du = F ′(x)dx =f(x)dx y dv = G′(x)dx = g(x)dx. En esta notacion podemos expresar la regla de integracion porpartes como ∫
u dv = uv −∫v du.
Ejemplos. Encuentre las siguientes integrales indefinidas.
1.∫
10te−5tdt = −2te−5t − 2
5e−5t+ C., tomando u = 2t y dv = 5e−5tdt.
2.∫
lnx dx = x lnx− x+ C haciendo u = lnx y dv = dx.
3.∫x√x+ 5 dx =
2
3x(x+ 5)3/2 − 4
15(x+ 5)5/2 + C haciendo u = x y dv = (x+ 5)1/2 dx.
4.∫t2et dt = t2et − 2tet + 2et + C haciendo u = t2 y dv = et dt la primera vez y u = t y
dv = et dt la segunda.
89
SEMANA 14
DESCOMPOSICION EN FRACCIONES
PARCIALES. LA INTEGRAL DEFINIDA.
14.1. Integracion de funciones racionales por desarrollo enfracciones parciales
Las funciones racionales son aquellas que pueden expresarse como cociente de dos funciones
polinomicas, es decir, como una expresion de la formaf(x)
g(x), donde f(x) y g(x) son polinomios. Si
el grado de f(x) es menor que el grado de g(x), se dice que la fraccion es propia, en caso contrariola fraccion se dice impropia.
El metodo que presentamos a continuacion nos permite integrar ciertas fracciones racionalespropias, mediante su descomposicion en fracciones parciales. En caso queramos integrar una frac-cion impropia, dividimos el numerador entre el denominador para obtener un residuo de menorgrado que el denominador. Por ejemplo
x5 + 2x3 − x+ 1
x3 + 5x= x2 − 3 +
14x+ 1
x3 + 5x.
Supongamos ahora que tenemos una fraccion racional propiaf(x)
g(x)de modo que todos los
factores reales irreductibles de g(x) son lineales. Es posible demostrar que a cada factor (ax+ b)r
de g(x), donde r es un entero positivo, le corresponden r sumandos en la descomposicion en
fracciones parciales def(x)
g(x)y que estos sumandos son de la forma
Ar(ax+ b)r
+Ar−1
(ax+ b)r−1+
Ar−2
(ax+ b)r−2+ · · ·+ A1
ax+ b,
90

donde A,B,C, · · · , K son constantes. Las siguiente proposicion nos permite saber como integrarcada sumando.
Proposicion 14.1. Sean a y b numeros reales con a 6= 0. Entonces∫1
ax+ bdx =
1
aln |ax+ b|+ C
y, para r 6= 1, ∫1
(ax+ b)rdx =
1
a(1− r)1
(ax+ b)r−1+ C.
Ejemplo 14.2. Descomponga en fracciones parciales e integre la siguiente fraccion racional
8x+ 12
x2 + 2x− 3.
Solucion. Note que x2 + 2x− 3 = (x+ 3)(x− 1). Luego podemos escribir
8x+ 12
x2 + 2x− 3=
A
x+ 3+
B
x− 1(14.1)
donde A y B son constantes que han de determinarse. Quitando denominadores transformamosesta expresion en
8x+ 12 = Ax− A+Bx+ 3B, (14.2)
luego, reagrupando la parte derecha de la ecuacion (14.2)
8x+ 12 = (A+B)x+ 3B − A. (14.3)
Si igualamos los coeficientes de las correspondientes potencias de x en (14.3), obtenemos
A+B = 8,
3B − A = 12.
Resolviendo simultaneamente estas ecuaciones encontramos A = 3, B = 5. Sustituyendo en laecuacion (14.1) estos valores de A y B obtenemos
8x+ 12
x2 + 2x− 3=
3
x+ 3+
5
x− 1. (14.4)
Finalmente, usando la proposicion 14.1, tenemos∫8x+ 12
x2 + 2x− 3dx =
∫3
x+ 3dx+
∫5
x− 1dx
= 3 ln |x+ 3|+ 5 ln |x− 1|+ C.
91

Ejemplo 14.3. La fraccion racional
x6 + 1
(x+ 1)(x− 2)2(x− 1)3(x− 3),
puede descomponerse como
x6 + 1
(x+ 1)(x− 2)2(x− 1)3(x− 3)=
A
x+ 1+
B
(x− 2)2+
C
x− 2+
D
(x− 1)3+
E
(x− 1)2+
F
x− 1+
G
x− 3.
14.2. La integral definidaLa integral definida de una funcion tiene una definicion formal en matematicas que esta rela-
cionada con el calculo del area encerrada por el grafico de una funcion. Dicha definicion se expresaen terminos de un lımite de sumas. Sin embargo, la manera practica de calcular la integral definidaes mediante el segundo teorema fundamental del calculo.
Definicion 14.4 (Segundo teorema fundamental del calculo). Sea f continua sobre un intervalo[a, b]. Si F es una primitiva de f sobre [a, b], entonces∫ b
a
f(x)dx = F (b)− F (a) = F (x)
∣∣∣∣ba
.
Cuando f(x) ≥ 0, para todo x ∈ [a, b], la integral∫ b
a
f(x)dx representa el area encerrada por
la grafica de f , el eje x y las rectas verticales x = a y x = b.
Ejemplo 14.5. Determine el area bajo la grafica de f(x) = 3x2 + 2x y las rectas x = 1 y x = 4 yel eje x.
Solucion. Una primitiva de f es F (x) = x3 + x2 +C con C constante. Como f(x) ≥ 0 para todo
x ∈ [1, 4], entonces A =
∫ 4
1
f(x)dx y por el segundo teorema fundamental
A =
∫ 4
1
f(x)dx = F (4)− F (1) = 43 + 42 + C − (13 + 12 + C) = 78.
Observe que no es necesario considerar la constante al momento de evaluar F (b)− F (a).
Ejemplo 14.6. Calcule las integrales definidas para las siguientes funciones y en los respectivosintervalos:
1. f1(x) =1
(x+ 1)2en [0, 5];
92

2. f2(x) = x3 en [−1, 1] y en [−2, 3];
3. f3(x) = ex en [0, 2];
4. f4(x) = ln(x) en [1, e].
Solucion.
1. Recordemos que una primitiva de f1 es F1(x) = − 1
x+ 1. Luego∫ 5
0
1
(x+ 1)2dx = F1(5)− F1(0) = −1
6− (−1) =
5
6.
2. Una primitiva para f2 es F2(x) =x4
4de donde∫ 1
−1
x3dx = F2(1)− F2(−1) =14
4− (−1)4
4= 0;
y ∫ 3
−2
x3dx = F2(3)− F2(−2) =34
4− (−2)4
4=
34 − 24
4=
65
4.
3. Una primitiva de f3 es F3(x) = ex. Ası,∫ 2
0
exdx = F3(2)− F3(0) = e2 − e0 = e2 − 1.
4. Finalmente una primitiva de f4 es F4(x) = x ln(x)− x. Por tanto∫ e
1
ln(x)dx = F4(e)− F4(1) = e ln(e)− e− (1 ln(1)− 1) = 1.
14.3. Propiedades de la integral definidaVeamos algunas propiedades de la integral definida.
Teorema 14.7. Sean f, g : [a, b]→ R funciones integrables en [a, b], y sea c ∈ R, entonces
1. f ± g son integrables en [a, b] y∫ b
a
[f ± g](x)dx =
∫ b
a
f(x)dx±∫ b
a
g(x)dx,
2. cf es integrable y ∫ b
a
cf(x)dx = c
∫ b
a
f(x)dx.
93

Teorema 14.8. Sea f : [a, b]→ R una funcion y c ∈]a, b[. Entonces f es integrable, si y solo si, fes integrable tanto en [a, c] como en [c, b]. En este caso, se tiene∫ b
a
f(x)dx =
∫ c
a
f(x)dx+
∫ b
c
f(x)dx.
Veamos los siguientes ejemplos:
Ejemplo 14.9. Calcule el area entre la grafica de la funcion f : R→ R definida por
f(x) =
{1 si x ≤ 3,
2, si x > 3,
las rectas x = 1 y x = 5 y el eje x.
x
y
1 3 4
Solucion. El area viene expresada por∫ 5
1
f(x)dx, y del Teorema 14.8 tenemos que
∫ 5
1
f(x)dx =
∫ 3
1
f(x)dx+
∫ 5
3
f(x)dx = 2 + 4 = 6.
Sea f : I → R una funcion. Si a, b ∈ I , con a < b, entonces ya sabemos calcular∫ b
a
f(x)dx.
En el caso que a ≥ b, podemos denotar la integral definida de f , por convencion, de la siguientemanera ∫ b
a
f(x)dx = −∫ a
b
f(x)dx.
En particular∫ a
a
f(x)dx = 0.
Ejemplo 14.10. Calcule la siguiente integral definida∫ 1
4
[(x+ 1)ex + ln(x)]dx.
94
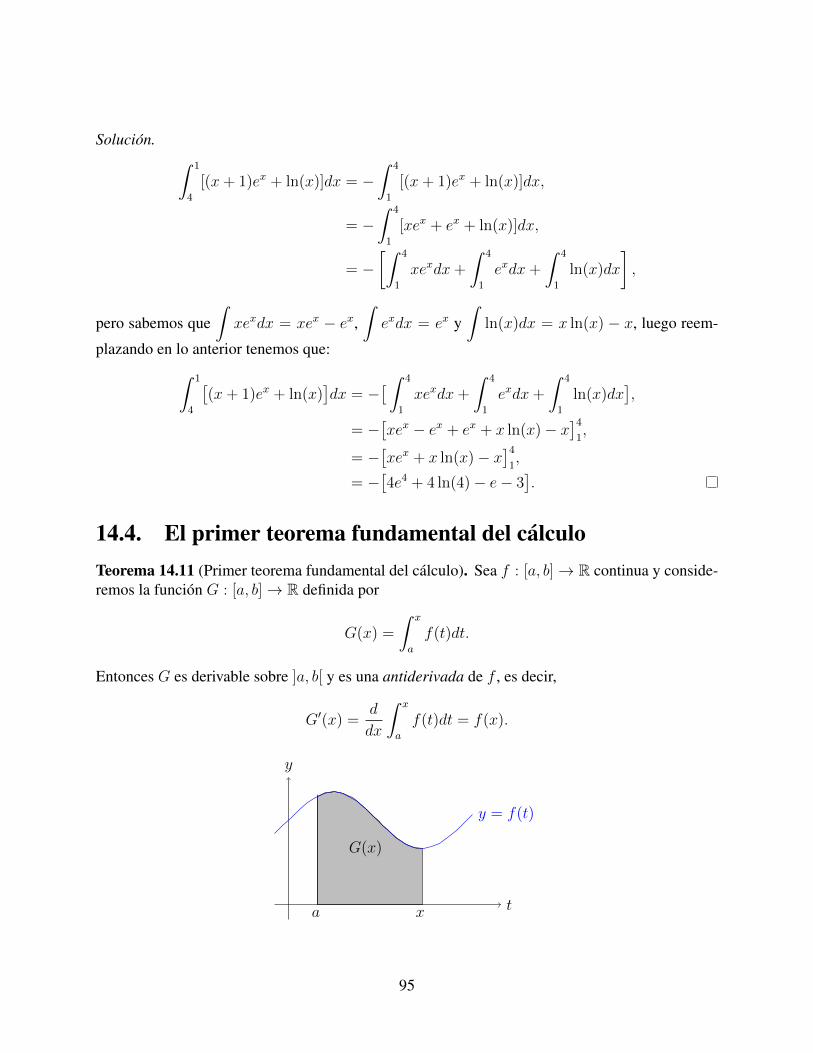
Solucion. ∫ 1
4
[(x+ 1)ex + ln(x)]dx = −∫ 4
1
[(x+ 1)ex + ln(x)]dx,
= −∫ 4
1
[xex + ex + ln(x)]dx,
= −[∫ 4
1
xexdx+
∫ 4
1
exdx+
∫ 4
1
ln(x)dx
],
pero sabemos que∫xexdx = xex − ex,
∫exdx = ex y
∫ln(x)dx = x ln(x) − x, luego reem-
plazando en lo anterior tenemos que:∫ 1
4
[(x+ 1)ex + ln(x)
]dx = −
[ ∫ 4
1
xexdx+
∫ 4
1
exdx+
∫ 4
1
ln(x)dx],
= −[xex − ex + ex + x ln(x)− x
]41,
= −[xex + x ln(x)− x
]41,
= −[4e4 + 4 ln(4)− e− 3
].
14.4. El primer teorema fundamental del calculoTeorema 14.11 (Primer teorema fundamental del calculo). Sea f : [a, b]→ R continua y conside-remos la funcion G : [a, b]→ R definida por
G(x) =
∫ x
a
f(t)dt.
Entonces G es derivable sobre ]a, b[ y es una antiderivada de f , es decir,
G′(x) =d
dx
∫ x
a
f(t)dt = f(x).
t
y
y = f(t)
a x
G(x)
95

SEMANA 15
AREA ENTRE CURVAS Y APLICACIONES DE
LA INTEGRAL DEFINIDA
15.1. Area entre curvasEl ejemplo ∫ 1
−1
x dx = 0,
nos muestra que la integral no corresponde exactamente a la nocion de area “bajo un curva”.
x
y
y = x
Esto porque al definir la integral, consideramos areas de rectangulos con altura f(x), siendo fla funcion considerada. Si f(x) < 0, las aproximaciones consideradas tienen altura negativa, porlo que en el ejemplo anterior tenemos una “compensacion” de areas. Sin embargo, esto se reparafacilmente considerando ∫ 1
−1
|x| dx = 1.
96

Hacemos la siguiente observacion inmediata.
Proposicion 15.1. Si f : [a, b]→ R es integrable sobre [a, b] y f(x) ≥ 0 para x ∈ [a, b], entonces∫ b
a
f(x)dx ≥ 0.
En cualquier caso, entonces una definicion mas apropiada de area es la siguiente.
Definicion 15.2. Si f : [a, b]→ R es una funcion integrable sobre [a, b], definimos el area entre lagrafica de y = f(x), el eje X y las rectas x = a, x = b mediante∫ b
a
∣∣f(x)∣∣dx.
Si f(x) ≥ 0 para x ∈ [a, b], esta definicion se reduce a∫ b
a
f(x)dx.
Definicion 15.3. Si f, g : [a, b] → R son integrables sobre [a, b], definimos el area entre lasgraficas de y = f(x), y = g(x) y las rectas x = a, x = b mediante∫ b
a
∣∣∣f(x)− g(x)∣∣∣dx.
Si f(x) ≥ g(x) para x ∈ [a, b], esta definicion se reduce a∫ b
a
(f(x)− g(x))dx.
x
y
y = f(x)
y = g(x)
a b
Observamos entretando que ∫ b
a
g(x)dx ≤∫ b
a
f(x)dx.
97
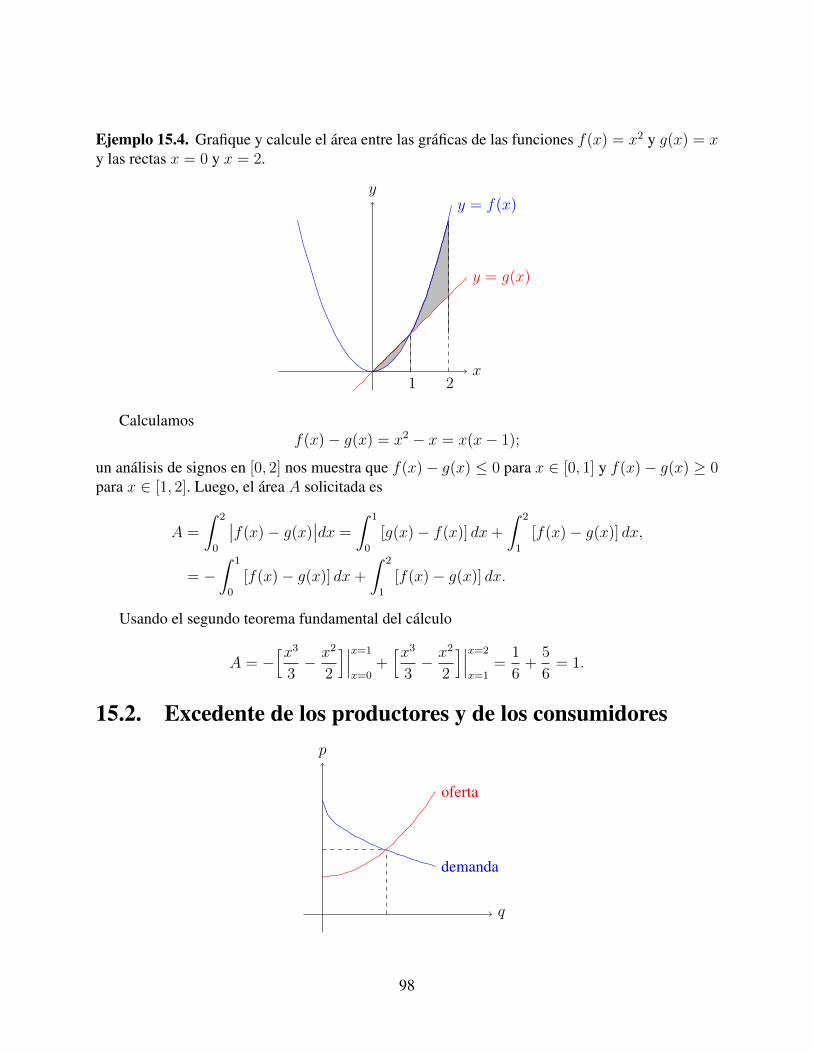
Ejemplo 15.4. Grafique y calcule el area entre las graficas de las funciones f(x) = x2 y g(x) = xy las rectas x = 0 y x = 2.
x
yy = f(x)
y = g(x)
1 2
Calculamosf(x)− g(x) = x2 − x = x(x− 1);
un analisis de signos en [0, 2] nos muestra que f(x)− g(x) ≤ 0 para x ∈ [0, 1] y f(x)− g(x) ≥ 0para x ∈ [1, 2]. Luego, el area A solicitada es
A =
∫ 2
0
∣∣f(x)− g(x)∣∣dx =
∫ 1
0
[g(x)− f(x)] dx+
∫ 2
1
[f(x)− g(x)] dx,
= −∫ 1
0
[f(x)− g(x)] dx+
∫ 2
1
[f(x)− g(x)] dx.
Usando el segundo teorema fundamental del calculo
A = −[x3
3− x2
2
]∣∣∣x=1
x=0+[x3
3− x2
2
]∣∣∣x=2
x=1=
1
6+
5
6= 1.
15.2. Excedente de los productores y de los consumidores
q
p
demanda
oferta
98

El grafico precedente muestra las curvas de oferta y demanda, explicitando el precio p de unproducto en funcion de la cantidad q (a suministrar o a comprar, respectivamente). La curva deoferta indica el precio al que el fabricante esta dispuesto a vender q unidades de producto. Lacurva de demanda muestra el precio al que los consumidores compraran q unidades. El punto deinterseccion de ambas curvas, el punto de equilibrio indica el precio al cual los consumidorescompraran la misma cantidad de producto que los fabricantes desean vender a dicho precio.
La funcion demanda de los consumidores p = g(q) tambien se puede considerar como latasa de cambio con respecto a q de la cantidad total T (q) que los consumidores estan dispuestos a
gastar por q unidades; es decir;dT
dq. Luego, la cantidad total que los consumidores estan dispuestos
a pagar por q0 unidades del artıculo esta dada por (teniendo en cuenta que T (0) = 0)
T (q0) =
∫ q0
0
dT
dq(q)dq =
∫ q0
0
g(q)dq.
En este contexto T (q) es la disposicion total al gasto y g(q) = T ′(q) la disposicion marginal algasto. En terminos geometricos, la disposicion total a gastar por q0 unidades es el area de la curvade la demanda p = g(q) entre q = 0 y q = q0.
q
p
Demanda
q0
Ejemplo 15.5. La funcion de demanda de los consumidores para cierto artıculo es g(q) = 4(25−q2) soles por unidad. Determine la cantidad total de dinero que los consumidores estan dispuestosa gastar para obtener 3 unidades del artıculo.
Solucion.
T (3) =
∫ 3
0
g(q)dq = 4
∫ 3
0
(25− q2)dq = 4
[25q − 1
3q3
]3
0
= 264.
99
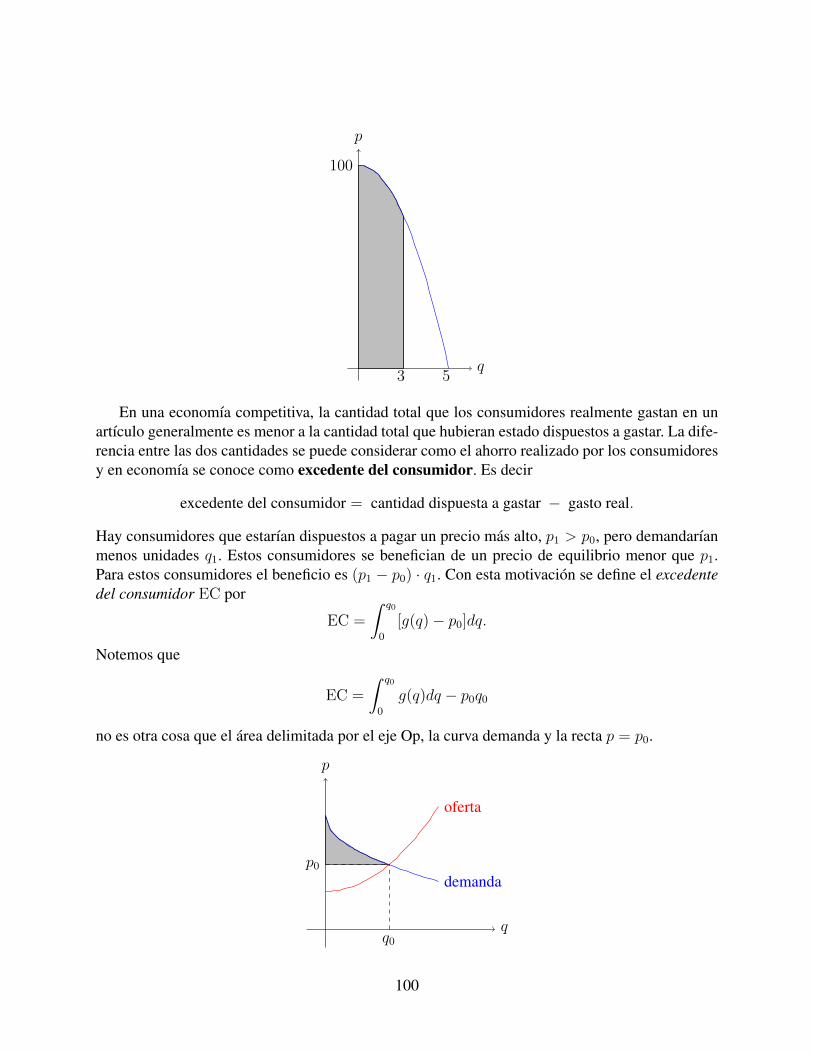
q
p
3 5
100
En una economıa competitiva, la cantidad total que los consumidores realmente gastan en unartıculo generalmente es menor a la cantidad total que hubieran estado dispuestos a gastar. La dife-rencia entre las dos cantidades se puede considerar como el ahorro realizado por los consumidoresy en economıa se conoce como excedente del consumidor. Es decir
excedente del consumidor = cantidad dispuesta a gastar − gasto real.
Hay consumidores que estarıan dispuestos a pagar un precio mas alto, p1 > p0, pero demandarıanmenos unidades q1. Estos consumidores se benefician de un precio de equilibrio menor que p1.Para estos consumidores el beneficio es (p1 − p0) · q1. Con esta motivacion se define el excedentedel consumidor EC por
EC =
∫ q0
0
[g(q)− p0]dq.
Notemos que
EC =
∫ q0
0
g(q)dq − p0q0
no es otra cosa que el area delimitada por el eje Op, la curva demanda y la recta p = p0.
q
p
demanda
oferta
q0
p0
100

Por otro lado, una funcion oferta p = f(q) da el precio unitario que los productores estan dispuestosa aceptar por ofertar q unidades en el mercado. Sin embargo, cualquier productor que este dispuestoa aceptar menos que p0 = f(q0) dolares por q0 unidades tiene ganancia por que el precio esp0. Entonces el excedente de los productores es la diferencia entre lo que los productores estandispuestos a aceptar para ofertar q0 unidades y el precio que en realidad reciben. Esto motiva ladefinicion del excedente del productor (EP) por
EP =
∫ q0
0
[p0 − f(q)]dq.
En este casoEP = p0q0 −
∫ q0
0
f(q)dq
representa el area delimitada por el eje Op, la curva oferta y la recta p = p0.
q
p
demanda
oferta
q0
p0
Ejemplo 15.6. Sean f y g las funciones de oferta y demanda respectivamente, especıficamentese demandaran o venderan q miles de unidades de un artıculo a un precio p = g(q) dolares porunidad, en tanto que los productores ofertaran q miles de unidades cuando el precio sea p = f(q)dolares por unidad, con las siguientes reglas de correspondencia:
f(q) = 0, 1q2 + q + 20 y g(q) = −0, 3q2 + 70.
Determine el punto de equilibrio y el excedente del consumidor y productor en el punto de equili-brio.
Solucion.
Igualando las curvas de demanda y oferta tenemos el punto de equilibrio; es decir
−0, 3q2 + 70 = 0, 1q2 + q + 20
de donde obtenemos que q = − 5
0, 4o q = 10, la produccion de equilibrio, q0, es 10, y luego de
reemplazar se tiene que p0, el precio de equilibrio, es 40, ası el punto de equilibrio es (10, 40).
101
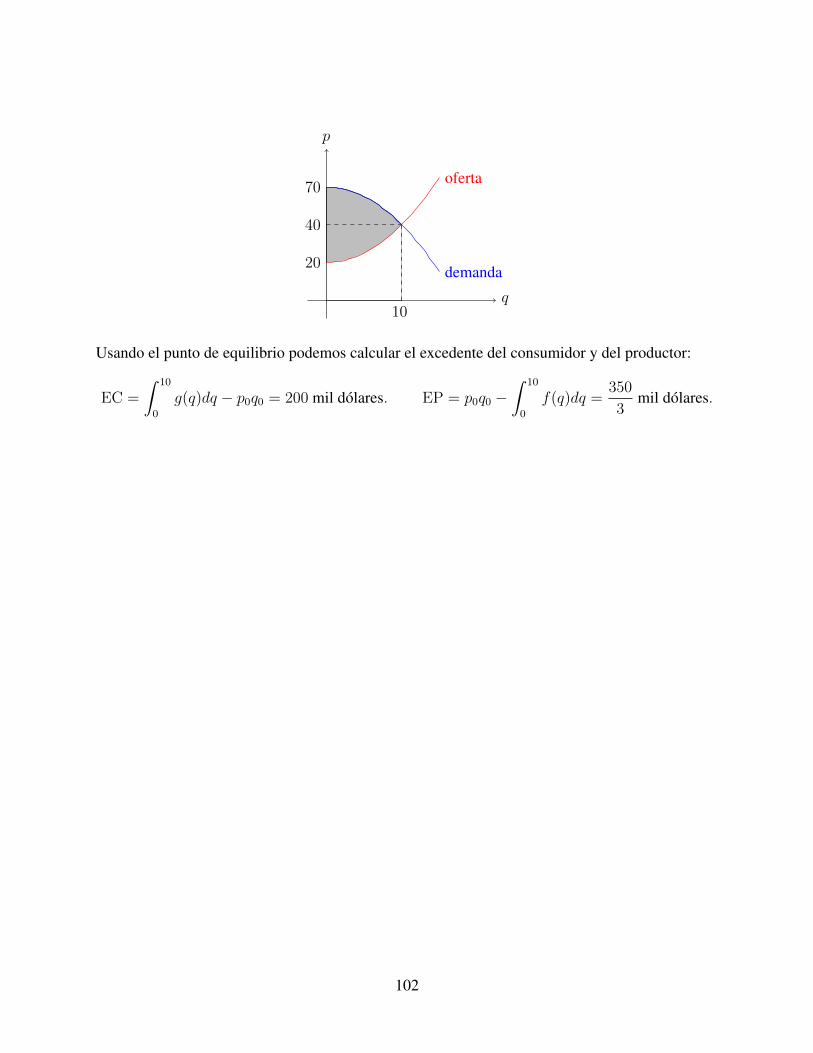
q
p
demanda
oferta70
20
10
40
Usando el punto de equilibrio podemos calcular el excedente del consumidor y del productor:
EC =
∫ 10
0
g(q)dq − p0q0 = 200 mil dolares. EP = p0q0 −∫ 10
0
f(q)dq =350
3mil dolares.
102

















