INTRODUCCIÓN A LOS MODELOS MATEMÁTICOS EN MECÁNICA DE FLUIDOS³n a los modelos... · 2 L S Á S...
133
César A. Yépez INTRODUCCIÓN A LOS MODELOS MATEMÁTICOS EN MECÁNICA DE FLUIDOS
-
Upload
nguyentuyen -
Category
Documents
-
view
216 -
download
0
Transcript of INTRODUCCIÓN A LOS MODELOS MATEMÁTICOS EN MECÁNICA DE FLUIDOS³n a los modelos... · 2 L S Á S...

César A. Yépez
INTRODUCCIÓN A LOS MODELOS
MATEMÁTICOS EN MECÁNICA DE
FLUIDOS
2
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
s modelos matemáticos
en mecánica de fluidos
Introducción a los modelos matemáticos en mecánica de fluidos César Augusto Yépez Gómez 4.0, CC-BY-NC-ND Primera edición digital Número de registro IEPI: 040416 ISBN-978-9942-28-873-8
Esta obra ha sido creada bajo licencia Creative Commons 4.0, CC, BY, NC, ND: Reconocimiento –No Comercial-Sin derivar; la cual permite: copiar, distribuir y comunicar públicamente la obra, mientras se reconozca la autoría original, no se utilice con fines de lucro comerciales y no se permiten obras derivadas. https://creativecommons.org/licenses/by-nc-nd/4.0/deed.es Julio, 2017

3
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Presentación
El presente trabajo titulado “Introducción a los modelos matemáticos en mecánica
de fluidos”, es una investigación bibliográfica que pretende formar en el estudiante
y los lectores interesados, una visión general y superficial de un tema extenso, pero
a la vez interesante. Se aclara que algunos de los temas investigados comprenden
modelos matemáticos que requieren una formación matemática elevada, razón por
la cual en el primer capítulo se presentan las definiciones necesarias que se utilizan
en los próximos capítulos. En el segundo capítulo se consideran los conceptos
básicos en mecánica de fluidos, luego se analiza la presión de un fluido en reposo
y la variación de ésta con la altura. Se analiza el principio de Arquímedes y la fuerza
de flotación. Por último, se presentan algunas aplicaciones de la estática de fluidos.
El tercer capítulo trata de las formas de descripción cinemática de un fluido. Se
deduce el teorema de transporte de Reynolds, el cual permite cambiar de un enfoque
de sistema a un enfoque de volumen de control. Luego se trata el principio de la
conservación de la masa y la ecuación de continuidad. Se considera también los
modelos matemáticos de diferentes tipos de flujos y la importancia de los modelos
matemáticos. En el cuarto capítulo se deducen las ecuaciones de Euler, la ecuación
de conservación de energía, la ecuación de Bernoulli y las ecuaciones de Navier
Stokes. Por último, en el capítulo 5 se introducen definiciones importantes que se
utilizan en la metodología de la enseñanza. Luego se tratan ciertos tópicos en la
enseñanza de matemática como por ejemplo un análisis de la problemática en la
enseñanza de matemática, así como también algunas recomendaciones
metodológicas, además se toman en cuenta el uso de programas computacionales y
las calculadoras gráficas. Se considera el uso de dos programas computacionales
para la enseñanza de matemática: Matemáticas de Microsoft y MATLAB.
César A. Yépez
4
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CONTENIDO
1. RESULTADOS FUNDAMENTALES DEL ANÁLISIS VECTORIAL
1.1. Derivada de funciones reales. Algebra de derivadas. Resultados
importantes…………………………………………………………………...
1.2. Integral de Riemann de funciones reales. Resultados importantes …………..
1.3. Derivada direccional. Derivadas parciales. Gradiente. Divergencia.
Rotacional……………………………………………………………………
Funciones de varias variables ……………………………………………….
Derivadas parciales ………………………………………………………….
Diferenciabilidad ……………………………………………………………
Diferencial total ……………………………………………………………...
Regla de la cadena …………………………………………………………..
Derivada direccional ………………………………………………………...
Gradiente …………………………………………………………………….
Campos vectoriales ………………………………………………………….
Rotacional……………………………………………………………...........
Divergencia. ………………………………………………………………...
1.4. Integrales dobles triples ……………………………………………………..
1.5. Integrales de línea. Integrales de superficie………………………………….
Integrales de línea …………………………………………………………..
Integrales de línea en el espacio …………………………………………….
Integrales de línea de campos vectoriales …………………………………..
Integrales de superficie ……………………………………………………..
Superficies paramétricas…………………………………………………….
1.6. Teoremas de transporte de Reynolds………………………………………...
9
13
15
15
16
17
17
18
18
21
23
25
26
27
30
30
30
34
35
36
37
2. MODELOS MATEMÁTICOS EN ESTÁTICA DE FLUIDOS
2.1. Algunos conceptos básicos en mecánica de fluidos………………………….
2.2. Presión de un fluido en reposo……………………………………………….
2.3. Variación de la presión con la altura en un fluido compresible e
incompresible………………………………………………………………...
2.3.1. Variación de la presión con la elevación para un fluido estático
incompresible. …………………………………………………………...
2.3.2. Variación de la presión con la elevación para un fluido estático
compresible. …………………………………………………………...
2.3.2.1.Gas a temperatura constante……………………………………………..
2.3.2.2.Gas a temperatura variable ………………………………………………
2.4. Teorema de Arquímedes y cuerpos flotantes………………………………...
2.5. Algunas aplicaciones prácticas………………………………………………
2.5.1. Batiscafo…………………………………………………………………
2.5.2. Manómetros ……………………………………………………………..
2.5.3. Hidrómetro………………………………………………………………
2.5.4. Máquinas multiplicadoras de fuerzas…………………………………..
39
42
42
42
46 47
48
50
51
51
53
54
55

5
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 3. CINEMÁTICA DE FLUIDOS NO VISCOSOS
3.1. Descripción cinemática de un fluido…………………………………………
3.1.1. Descripción lagrangiana………………………………………………….
3.1.2. Descripción euleriana…………………………………………………….
3.1.3. Campo de aceleraciones…………………………………………………
3.1.4. Derivada material………………………………………………………...
3.1.5. El teorema de transporte de Reynolds……………………………………
3.2. Conservación de masa. Ecuación de continuidad……………………………
3.3. Diferentes tipos de flujos…………………………………………………….
3.4. Flujos estacionarios. Incompresibles. Irrotacionales 2d y 3d de un fluido no
viscoso………………………………………………………………………..
3.4.1. Flujo estacionario………………………………………………………...
3.4.2. Flujo incompresible………………………………………………………
3.4.3. Flujo irrotacional ………………………………………………………..
3.4.4. La función corriente……………………………………………………...
3.4.5. Potencial de la velocidad…………………………………………………
3.4.6. Relación entre la función corriente y el potencial de velocidad…………
3.4.7. Flujo uniforme……………………………………………………………
3.4.7.1. Flujo uniforme bidimensional…………………………………………...
3.4.7.2. Flujo uniforme tridimensional…………………………………………..
3.4.8. Fuentes y sumideros ……………………………………………………..
3.4.8.1.Fuentes y sumideros bidimensionales……………………………………
3.4.8.2.Fuentes y sumideros tridimensionales…………………………………...
3.4.9. Dobletes………………………………………………………………….
3.4.9.1.Doblete bidimensional…………………………………………………...
3.4.9.2.Doblete tridimensional…………………………………………………..
3.5. Flujo de un fluido alrededor de una esfera y de un obstáculo cilíndrico……
3.5.1. Flujo alrededor de un obstáculo cilíndrico………………………………
3.5.2. Flujo alrededor de una esfera……………………………………………
3.6. Importancia de los modelos matemáticos. …………………………………..
59
60
61
62
63
63
68
69
69
70
70
71
73
74
75
75
76
78
78
78
80
81
81
82
83
83
84
85
4. DINÁMICA DE FLUIDOS NO VISCOSOS
4.1. Ecuación de Euler …………………………………………………………..
4.2. Conservación de la energía. Ecuación de Bernoulli…………………………
4.3. Algunas aplicaciones de la ecuación de Bernoulli…………………………..
Minería……………………………………………………………………….
Aeronáutica y automóviles…………………………………………………..
Agua rociada en el aire……………………………………………………….
Cálculo de la velocidad de flujo que sale de un tanque………………………
4.4. Ecuación de Navier-Stokes…………………………………………………..
4.5. Algunas aplicaciones en la industria…………………………………………
Turbo máquina simple ………………………………………………………
Turborreactor…………………………………………………………………
4.6. Simplificación de algunos modelos……………………………………….....
Ecuación de la continuidad en un flujo estacionario y unidimensional……...
87
88
92
92
93
94
95
95
102
102
102
103
103
6
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Conservación de la energía en un flujo permanente, unidimensional y sin
fricción……………………………………………………………………….
104
5. PROPUESTA METODOLÓGICA EN LA ENSEÑANZA DE
MATEMÁTICA
5.1. Metodología de la enseñanza………………………………………………..
5.1.1. Definiciones generales…………………………………………………..
5.1.2. Metodología en la enseñanza de Matemática……………………………
Análisis de la problemática de la enseñanza de la matemática…………
Recomendaciones metodológicas……………………………………….
Uso de programas computacionales y calculadoras gráficas…………….
5.2. Fundamentos de Matemáticas de Microsoft. Prácticas de matemática con
Matemáticas de Microsoft……………………………………………………
Geometría, coordenada y recta………………………………………………
Graficas de ecuaciones de segundo grado……………………………………
5.3. Fundamentos de MATLAB. Prácticas de matemática con MATLAB.
Resolución de problemas aplicados en mecánica de fluidos………………...
107
107
110
110
111
115
116
118
120
121
LISTADO DE FIGURAS
Figura 1.1. Gráfica de una función real f y de rectas secantes que pasan por el
punto (𝑥0, 𝑓(𝑥0)).
Figura 1.2 Región S ubicada bajo la gráfica de f.
Figura 1.3 Cálculo del área bajo la gráfica de 𝑦 = 𝑓(𝑥).
Figura 1.4 Interpretación geométrica de la derivada direccional.
Figura 1.5 Campo vectorial 𝐹(𝑥, 𝑦, 𝑧) = 𝑦𝑗, (𝑥, 𝑦, 𝑧) ∈ ℝ3.
Figura 1.6. Campo vectorial de velocidades �⃗�(𝑥, 𝑦, 𝑧) = (16 − 𝑥2 − 𝑦2)𝑘.⃗⃗⃗ ⃗
Figura 1.7 Una rueda pequeña con paletas en la parte inferior no girará cuando se está
moviéndose en un fluido con un campo de velocidad �⃗⃗�(𝑥, 𝑦, 𝑧) =𝑦
𝑥2+𝑦2𝑖 −
𝑥
𝑥2+𝑦2𝑗 .
Figura 1.8 Interpretación de una integral doble.
Figura 1.9 Interpretación de una integral triple.
Figura 1.10 Interpretación de una integral en línea.
Figura 1.11 La partición de [a, b] que determina una partición en C .
Figura 1.12 Superficie S y su proyección R sobre el plano XY.
Figura 1.13 Superficie paramétrica S.

7
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Figura 2.1 Algunos esfuerzos aplicados en un elemento diferencial de volumen.
Figura 2.2 Fuerzas que actúan sobre un elemento de volumen.
Figura 2.3 Cuerpo sumergido en un fluido estático.
Figura 2.4 Fuerzas que actúan sobre un elemento de volumen.
Figura 2.5 Batiscafo Trieste Figura 2.6 Manómetro de tubo abierto
Figura 2.7 (a) Hidrómetro sencillo (b) Hidrómetro que mide la densidad del ácido
de una batería.
Figura 2.8 Principio de aplicación de la fuerza multiplicadora.
Figura 2.9 Ejemplo de aplicación de una fuerza multiplicadora.
Figura 2.10 a) Gato hidráulico. b) Máquina compactadora de autos. c) Máquina
para la construcción.
Figura 3.1 Línea de corriente para un flujo en dos dimensiones.
Figura 3.2 Descripción lagrangiana de tres partículas.
Figura 3.3. Un sistema en movimiento y un volumen de control fijo.
Figura 3.4 a) Superficie diferencial dA en la superficie de control en el tiempo
t b)Volumen diferencial dV en el tiempo t+∆t.
Figura 3.5 Rotación de un elemento de fluido.
Figura 3.6 Flujo uniforme bidimensional.
Figura 3.7 Fuente bidimensional.
Figura 3.8 Red de flujo para un doblete.
Figura 3.9 Idealización del flujo alrededor de un cilindro.
Figura 3.10 Idealización del flujo alrededor de una esfera.
Figura 4.1. Flujo permanente a lo largo de una línea de corriente.
Figura 4.2 Algunos esfuerzos normales y de deformación en la dirección del eje x.
Figura4.4 Turbo máquina.
Figura 4.5 Algunos tipos de turborreactores.
Figura 4.6 Volumen de control con una entrada y una salida de flujo estacionario y
unidimensional.
Figura 4.7 Volumen de control con flujo unidimensional.
Figura 5.1 Interfaz de Matemáticas de Microsoft.
Figura 5.2 Gráfica de la recta 𝑦 = 2𝑥 − 3.
8
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Figura 5.3 (a) Ecuaciones de distintas rectas. (b) Sección Controles de la gráfica. c)
Gráficas de las ecuaciones de distintas rectas.
Figura 5.4 Gráficas de la ecuación 𝑦 = 𝑎𝑥2 en 2D (izquierda) y en 3D (derecha).
Figura 5.6 Grafica de la ecuación 𝑦2 + 𝑥2 + 𝑧2 = 1 en 3D.
Figura 5.5 La gráfica de la ecuación 𝑦2 + 𝑥2 = 1 en 2D representa una
circunferencia (izquierda) y en 3D representa un cilindro (derecha).
Figura 5.7 Interfaz de MATLAB versión 7.8.0.347.
Figura 5.8 Gráfica de la función seno elaborada en MATLAB.
Figura 5.9. Variación de la presión para un gas a temperatura constante.
Figura 5.10 Variación de la presión para un gas a temperatura variable.
Figura 5.11 Campo de velocidades �⃗⃗� = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗.
Figura 5.12 Campo vectorial y líneas de corriente para el flujo �⃗⃗� = (0.5 + 0.8𝑥)𝑖 +
(1.5 − 0.8𝑦)𝑗.
Figura 5.13 Campo de aceleraciones �⃗� = (0.4 + 0.64𝑥)𝑖 + (−1.2 + 0.64𝑦)𝑗.
Figura 5.14 Grafica del campo de presión del campo de velocidad �⃗⃗� = (𝑢, 𝑣) =
(0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗.
LISTADO DE TABLAS
Tabla 4.1 Relaciones de Stokes para la viscosidad.
Tabla 5.1 Proceso didáctico para la enseñanza de la matemática.
Tabla 5.2 Método heurístico (buscar o descubrir la verdad o solucionar
problemas).
Tabla 5.3 Método inductivo.
Tabla 5.4 Método deductivo.
Tabla 5.5 Técnica de solución de problemas.
9
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CAPITULO 1
RESULTADOS FUNDAMENTALES DEL ANÁLISIS VECTORIAL
Resumen
En este capítulo se introducen los aspectos matemáticos necesarios para abordar el
estudio de la mecánica de fluidos que se tratan en los siguientes capítulos. Se inicia
con una revisión de la derivada de funciones reales, luego se analiza la integral de
Riemann, el cálculo en varias variables como: derivada direccional, gradiente,
divergencia, rotacional, cálculo vectorial, integrales dobles, integrales triples,
integrales de línea e integrales de superficie, y por último se introduce el teorema
de transporte de Reynolds.
En cada tema tratado se indica la bibliografía utilizada y los textos recomendados
para aclarar y profundizar el presente trabajo.
1.1.- Derivada de funciones reales. Algebra de derivadas. Resultados
importantes.
Derivada de funciones reales
El estudio de la derivada de funciones reales inicia con el cálculo del límite de una
función. La ampliación de los temas tratados se la puede encontrar en la siguiente
bibliografía: ([1] págs.379-395)
Sean 𝐴 ⊂ ℝ, f una función real definida en A y 𝑥0 ∈ 𝐴. El grafo de f se define como
𝐺(𝑓) = {(𝑥, 𝑓(𝑥))/𝑥 ∈ 𝐴} . Este conjunto se representa en el sistema de
coordenadas rectangulares XY (figura 1.1).
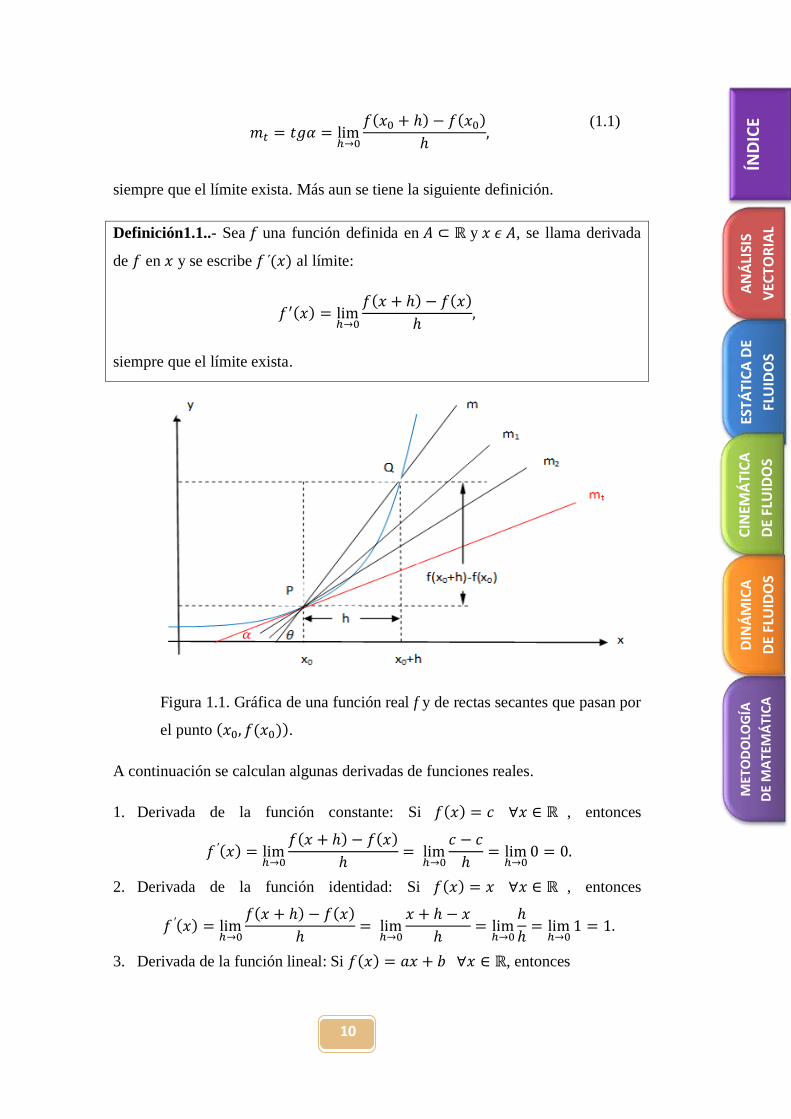
La pendiente entre dos puntos de la curva está definida como
𝑝𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 = 𝑚 = 𝑡𝑔(𝜃) =∆𝑦
∆𝑥=𝑓(𝑥0 + ℎ) − 𝑓(𝑥0)
ℎ.
La pendiente 𝑚𝑡 de la recta tangente a la gráfica de 𝑓 en el punto 𝑥0 se define
como:
10
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑚𝑡 = 𝑡𝑔𝛼 = limℎ→0
𝑓(𝑥0 + ℎ) − 𝑓(𝑥0)
ℎ,
(1.1)
siempre que el límite exista. Más aun se tiene la siguiente definición.
Definición1.1..- Sea 𝑓 una función definida en 𝐴 ⊂ ℝ y 𝑥 𝜖 𝐴, se llama derivada
de 𝑓 en 𝑥 y se escribe 𝑓´(𝑥) al límite:
𝑓′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ,
siempre que el límite exista.
Figura 1.1. Gráfica de una función real f y de rectas secantes que pasan por
el punto (𝑥0, 𝑓(𝑥0)).
A continuación se calculan algunas derivadas de funciones reales.
1. Derivada de la función constante: Si 𝑓(𝑥) = 𝑐 ∀𝑥 ∈ ℝ , entonces
𝑓 ′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ= lim
ℎ→0
𝑐 − 𝑐
ℎ= limℎ→0
0 = 0.
2. Derivada de la función identidad: Si 𝑓(𝑥) = 𝑥 ∀𝑥 ∈ ℝ , entonces
𝑓 ′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ= lim
ℎ→0
𝑥 + ℎ − 𝑥
ℎ= limℎ→0
ℎ
ℎ= limℎ→0
1 = 1.
3. Derivada de la función lineal: Si 𝑓(𝑥) = 𝑎𝑥 + 𝑏 ∀𝑥 ∈ ℝ, entonces

11
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑓′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ= lim
ℎ→0
𝑎(𝑥 + ℎ) + 𝑏 − (𝑎𝑥 + 𝑏)
ℎ= limℎ→0
𝑎ℎ
ℎ
= limℎ→0
𝑎 = 𝑎.
4. Derivada de la función potencia de exponente entero positivo: Sea f la función
definida por 𝑓(𝑥) = 𝑥𝑛 ∀𝑥 ∈ ℝ, 𝑛 ∈ 𝑍+ entonces por la definición de
derivada se tiene:
𝑓 ′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ= lim
ℎ→0
(𝑥 + ℎ)𝑛 − 𝑥𝑛
ℎ
= limℎ→0
[(𝑥 + ℎ) − 𝑥][(𝑥 + ℎ)𝑛−1𝑥0 + (𝑥 + ℎ)𝑛−2𝑥1 +⋯… + (𝑥 + ℎ)0𝑥𝑛−1]
ℎ
= limℎ→0
ℎ[(𝑥 + ℎ)𝑛−1 + (𝑥 + ℎ)𝑛−2𝑥1 +⋯… + (𝑥 + ℎ)1𝑥𝑛−2 + 𝑥𝑛−1]
ℎ
= limℎ→0[(𝑥 + ℎ)𝑛−1 + (𝑥 + ℎ)𝑛−2𝑥1 +⋯… + (𝑥 + ℎ)1𝑥𝑛−2 + 𝑥𝑛−1]
= (𝑥 + 0)𝑛−1 + (𝑥 + 0)𝑛−2𝑥1 +⋯… + (𝑥 + 0)1𝑥𝑛−2 + 𝑥𝑛−1
= 𝑥𝑛−1 + 𝑥𝑛−2𝑥1 +⋯… + 𝑥1𝑥𝑛−2 + 𝑥𝑛−1
= 𝑛𝑥𝑛−1.
A continuación se presentan las derivadas de algunas funciones, las cuales se
obtienen mediante el mismo procedimiento de las derivadas anteriores.
5. Derivada de la función seno: Sea f la función definida por 𝑓(𝑥) = sen 𝑥 𝑥 ∈
ℝ, entonces
𝑓 ′(𝑥) = cos 𝑥.
6. Derivada de la función coseno: Sea f la función definida por 𝑓(𝑥) = cos 𝑥
𝑥 ∈ ℝ, entonces
𝑓 ′(𝑥) = − sen 𝑥.
7. Derivada de la función logarítmica: Si 𝑓(𝑥) = log𝑎 𝑥 𝑥 > 0 entonces
𝑓 ′(𝑥) =1
𝑥 ln 𝑎 𝑥 > 0.
Notación: A la derivada 𝑓′(𝑥) la podemos escribir de diferentes formas y que
representan lo mismo, así:
Si 𝑦 = 𝑓(𝑥) entonces la derivada 𝑓′(𝑥) =𝑑𝑦
𝑑𝑥= 𝑦´.

12
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Algebra de derivadas
Una vez establecidas las definiciones elementales sobre derivadas, podemos ahora
establecer ciertas reglas de derivadas que se aplican en el estudio del cálculo más
avanzado. Presentaremos estas reglas como definiciones, aunque en realidad en la
mayoría de textos se presentan como teoremas, los cuales se los demuestra
utilizando la definición de derivada como el límite de una función. A continuación
se resumen algunas propiedades tomadas de ([1] págs. 379-395)
Sean f, 𝑔 funciones reales definidas en 𝐴 ⊂ ℝ y derivables en 𝑥 ∈ 𝐴, 𝑐 ∈ ℝ.
1. Si 𝐹 = 𝑐 𝑓 , entonces:
𝐹´(𝑥) = 𝑐𝑓´(𝑥).
2. Derivada de la suma de funciones: si 𝐺 = 𝑓 + 𝑔 , entonces:
𝐺´(𝑥) = 𝑓 ′(𝑥) + 𝑔′(𝑥).
3. Si G= 𝑓 − 𝑔, entonces:
𝐺´(𝑥) = 𝑓′(𝑥) − 𝑔′(𝑥).
4. Derivada del producto de funciones 𝐹 = 𝑓𝑔 , entonces:
𝐹′(𝑥) = 𝑓(𝑥)𝑔′(𝑥) + 𝑔(𝑥)𝑓 ′(𝑥).
5. Derivada del cociente de funciones: Si 𝐹 =𝑓
𝑔 con 𝑔 ≠ 0, entonces :
𝐹′(𝑥) =𝑔(𝑥)𝑓 ′(𝑥) − 𝑓(𝑥)𝑔′(𝑥)
(𝑔(𝑥))2 .
6. Derivada de la función compuesta: Si 𝐹 = 𝑓 ∘ 𝑔 es la función compuesta
definida por 𝐹(𝑥) = 𝑓(𝑔(𝑥)) y si 𝑔´(𝑥) y 𝑓´(𝑥) existen, entonces 𝐹´(𝑥) existe
y está definida como:
𝐹´(𝑥) = 𝑓´(𝑔(𝑥))𝑔´(𝑥).
Como ejemplo calcularemos la derivada de la función tangente. Si 𝑓(𝑥) = 𝑡𝑔(𝑥)
entonces 𝑓(𝑥) =𝑠𝑒𝑛(𝑥)
cos (𝑥) con cos (𝑥) ≠ 0, luego, aplicando la derivada del cociente
de funciones tenemos:
𝑓´(𝑥) =cos(𝑥) (cos(𝑥)) − 𝑠𝑒𝑛(𝑥)(−𝑠𝑒𝑛(𝑥))
(cos (𝑥))2=𝑐𝑜𝑠2(𝑥) + 𝑠𝑒𝑛2(𝑥)
𝑐𝑜𝑠2(𝑥)=
1
𝑐𝑜𝑠2(𝑥)= 𝑠𝑒𝑐2(𝑥).
13
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 1.2.- Integral de Riemann de funciones reales. Resultados importantes.
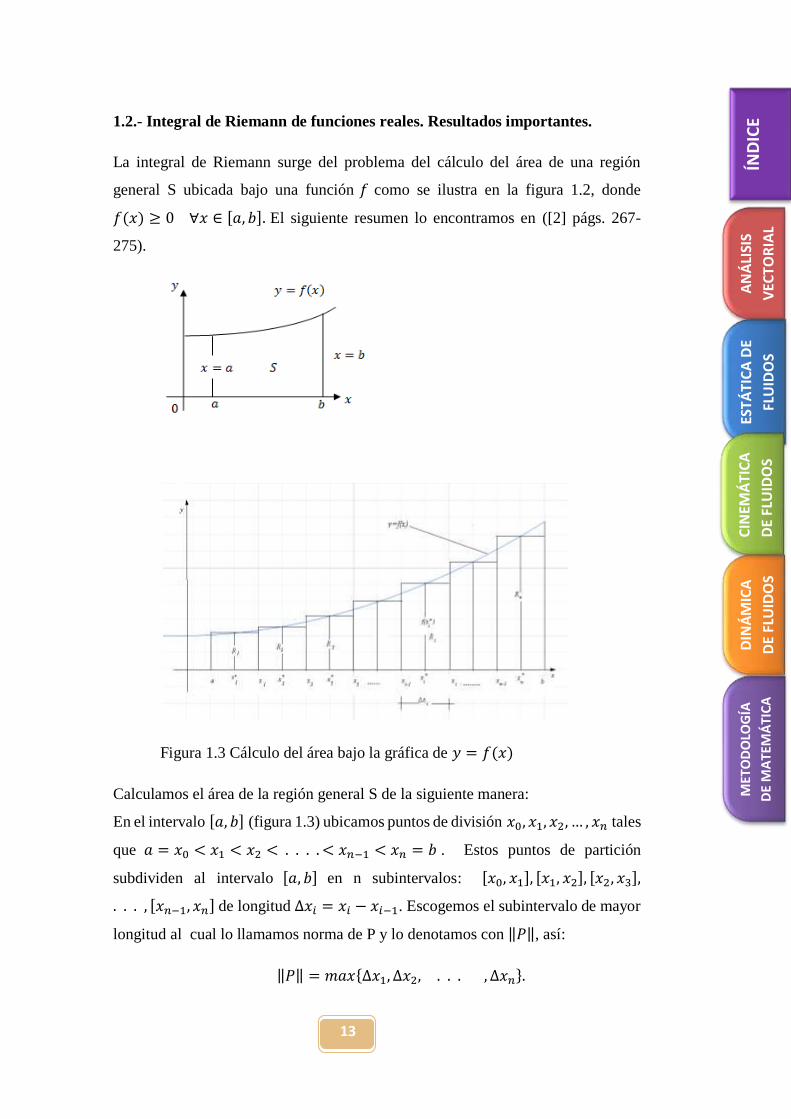
La integral de Riemann surge del problema del cálculo del área de una región
general S ubicada bajo una función 𝑓 como se ilustra en la figura 1.2, donde
𝑓(𝑥) ≥ 0 ∀𝑥 ∈ [𝑎, 𝑏]. El siguiente resumen lo encontramos en ([2] págs. 267-
275).
Figura 1.3 Cálculo del área bajo la gráfica de 𝑦 = 𝑓(𝑥)
Calculamos el área de la región general S de la siguiente manera:
En el intervalo [𝑎, 𝑏] (figura 1.3) ubicamos puntos de división 𝑥0, 𝑥1, 𝑥2, … , 𝑥𝑛 tales
que 𝑎 = 𝑥0 < 𝑥1 < 𝑥2 < . . . . < 𝑥𝑛−1 < 𝑥𝑛 = 𝑏 . Estos puntos de partición
subdividen al intervalo [𝑎, 𝑏] en n subintervalos: [𝑥0, 𝑥1], [𝑥1, 𝑥2], [𝑥2, 𝑥3],
. . . , [𝑥𝑛−1, 𝑥𝑛] de longitud ∆𝑥𝑖 = 𝑥𝑖 − 𝑥𝑖−1. Escogemos el subintervalo de mayor
longitud al cual lo llamamos norma de P y lo denotamos con ‖𝑃‖, así:
‖𝑃‖ = 𝑚𝑎𝑥{∆𝑥1, ∆𝑥2, . . . , ∆𝑥𝑛}.
14
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Escogemos números 𝑥𝑖∗ en cada subintervalo [𝑥𝑖−1, 𝑥𝑖] para construir rectángulos
𝑅𝑖 de base ∆𝑥𝑖 y altura 𝑓(𝑥𝑖∗), Obtenemos el área de 𝑅𝑖 mediante el producto
𝐴𝑖 = 𝑓(𝑥𝑖∗)∆𝑥𝑖 ,
luego, el área de S que se escribe 𝑎(𝑆) se aproxima mediante la suma:
∑𝐴𝑖
𝑛
𝑖=1
=∑𝑓(𝑥𝑖∗)∆𝑥𝑖
𝑛
𝑖=1
= 𝑓(𝑥1∗)∆𝑥1+. . . . +𝑓(𝑥𝑛
∗)∆𝑥𝑛,
finalmente, si tomamos un mayor número de particiones n, es decir cuando n tiende
al infinito, esto es cuando ‖𝑃‖ → 0 entonces llegaremos al límite de la suma de los
rectángulos de aproximación 𝑅𝑖 para calcular el área de la región S, es decir:
𝑎(𝑆) = lim‖𝑃‖→0
∑𝑓(𝑥𝑖∗)∆𝑥𝑖,
𝑛
𝑖=1
siempre que este exista.
(1.2)
Definición 1.2.- Sea f una función definida sobre un intervalo [𝑎, 𝑏] con puntos de
división 𝑥0 , 𝑥1, 𝑥2, … . , 𝑥𝑛 tales que 𝑎 = 𝑥0 < 𝑥1 < 𝑥2 < ⋯ < 𝑥𝑛 = 𝑏.
Sean 𝑥𝑖∗ ∈ [ 𝑥𝑖−1 − 𝑥𝑖] , ∆𝑥 = 𝑥𝑖 − 𝑥𝑖−1 y ‖𝑃‖ = 𝑚á𝑥{∆𝑥𝑖} . Si existe
lim‖𝑃‖→0
∑ 𝑓(𝑥𝑖∗)∆𝑥𝑖
𝑛𝑖=1 , se le llama integral definida de f desde 𝑎 hasta 𝑏 y se lo nota
con ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎. Es decir,
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎
= lim‖𝑃‖→0
∑𝑓(𝑥𝑖∗)∆𝑥𝑖
𝑛
𝑖=1
.
a la función f se le llama función integrable en [𝑎, 𝑏].
Propiedades de la integral definida
A continuación se presentan las propiedades básicas de la integral definida. Las
mismas que las encontramos en ([2] págs. 281-282).

15
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Sean 𝑐 ∈ ℝ, f, 𝑔 funciones reales integrables en [𝑎, 𝑏], entonces
1. ∫ 𝑐𝑏
𝑎𝑑𝑥 = 𝑐(𝑏 − 𝑎).
2. ∫ [𝑓(𝑥) + 𝑔(𝑥)]𝑏
𝑎𝑑𝑥 = ∫ 𝑓(𝑥)
𝑏
𝑎𝑑𝑥 + ∫ 𝑔(𝑥)
𝑏
𝑎𝑑𝑥.
3. ∫ 𝑐𝑓(𝑥)𝑏
𝑎𝑑𝑥 = 𝑐 ∫ 𝑓(𝑥)
𝑏
𝑎𝑑𝑥.
4. ∫ [𝑓(𝑥) − 𝑔(𝑥)]𝑏
𝑎𝑑𝑥 = ∫ 𝑓(𝑥)
𝑏
𝑎𝑑𝑥 − ∫ 𝑔(𝑥)
𝑏
𝑎𝑑𝑥.
5. ∫ 𝑓(𝑥)𝑏
𝑎𝑑𝑥 = ∫ 𝑓(𝑥)
𝑐
𝑎𝑑𝑥 + ∫ 𝑓(𝑥)𝑑𝑥.
𝑏
𝑐
Por ejemplo, para evaluar ∫ (𝑥 + 2 cos(𝑥))𝜋
0𝑑𝑥 aplicamos la propiedad 2:
∫ (𝑥 + 2 cos(𝑥))𝜋
0𝑑𝑥 = ∫ 𝑥𝑑𝑥
𝜋
0+ ∫ 2cos (𝑥)𝑑𝑥
𝜋
0, luego la propiedad 3:
∫ 𝑥𝑑𝑥𝜋
0+ ∫ 2cos (𝑥)𝑑𝑥
𝜋
0= ∫ 𝑥𝑑𝑥
𝜋
0+ 2∫ cos (𝑥)𝑑𝑥
𝜋
0.
A la integral definida se le llama también integral de Riemann.
1.3.- Derivada direccional. Derivadas parciales. Gradiente. Divergencia.
Rotacional.
Funciones de varias variables.
Una función de una variable, es aquella que tiene una variable independiente, así,
una función real definida en A, escribimos 𝑦 = 𝑓(𝑥), 𝑥 es la variable independiente
mientras que 𝑦 es la variable dependiente, la representación geométrica de ésta
función se la hace en el plano XY. Una función de dos variables es aquella que tiene
dos variables independientes, así, si Ω ⊂ ℝ2 y 𝑓 una función real de Ω en ℝ
escribimos 𝑧 = 𝑓(𝑥, 𝑦); 𝑥, 𝑦 son las variables independientes, su representación
geométrica se la hace en el espacio de las tres dimensiones 𝑥𝑦𝑧. Una función de
tres variables como 𝑧 = 𝑓(𝑥, 𝑦, 𝑡) tiene tres variables independientes; su
representación geométrica no es posible. Las funciones de varias variables tienen
mayor significado real, ya que las cantidades físicas por lo general, dependen de
dos o más variables.

16
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E A continuación se desarrollan algunos conceptos básicos del cálculo de funciones
de varias variables
Una ampliación de éste tema y los relacionados al mismo se la encuentra en la
siguiente bibliografía: ([3] págs. 125-209).
Derivadas parciales
Las derivadas parciales son la generalización de la derivada de la función de una
variable a una función de varias variables. Resumiremos una introducción a las
derivadas parciales del siguiente texto: ([3] págs. 147-148; 151).
Sean Ω ⊂ ℝ2, f una función de Ω en ℝ de dos variables x e y que escribimos 𝑧 =
𝑓(𝑥, 𝑦). Si 𝑦 es considerada como constante e igual a 𝑦0, entonces 𝑓(𝑥, 𝑦0) es una
función de una sola variable 𝑥; su derivada en 𝑥 = 𝑥0 es llamada la derivada parcial
de 𝑓(𝑥, 𝑦) con respecto a 𝑥, la cual se denota por 𝜕𝑓
𝜕𝑥(𝑥0, 𝑦0). Recordando que la
derivada de la función de una variable 𝑦 = 𝑓(𝑥) se expresa como el límite
𝑓′(𝑥) = limℎ→0
𝑓(𝑥 + ℎ) − 𝑓(𝑥)
ℎ,
acoplaremos esta definición a la función de dos variables 𝑧 = 𝑓(𝑥, 𝑦), entonces
tenemos los dos límites siguientes:
𝜕𝑓
𝜕𝑥(𝑥0, 𝑦0) = lim
ℎ→0
𝑓(𝑥0 + ℎ, 𝑦0) − 𝑓(𝑥0, 𝑦0)
ℎ,
𝜕𝑓
𝜕𝑦(𝑥0, 𝑦0) = lim
ℎ→0
𝑓(𝑥0 , 𝑦0 + ℎ) − 𝑓(𝑥0, 𝑦0)
ℎ,
siempre que los límites existan.
Si 𝑓 es una función de tres variables 𝑥, 𝑦, 𝑧 entonces para calcular la derivada
parcial de 𝑓 con respecto a 𝑥, consideramos a las variables 𝑦, 𝑧 como constantes,
en este caso se tiene el siguiente límite:
𝜕𝑓
𝜕𝑥(𝑥0, 𝑦0, 𝑧0) = lim
ℎ→0
𝑓(𝑥0 + ℎ, 𝑦0, 𝑧0) − 𝑓(𝑥0, 𝑦0, 𝑧0)
ℎ,
siempre que el límite exista.
17
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Para calcular la derivada parcial de 𝑓 con respecto a 𝑦 , consideramos constantes
las variables 𝑥,𝑧 , por lo tanto:
𝜕𝑓
𝜕𝑦(𝑥0, 𝑦0, 𝑧0) = lim
ℎ→0
𝑓(𝑥0 , 𝑦0 + ℎ, 𝑧0) − 𝑓(𝑥0, 𝑦0, 𝑧0)
ℎ,
siempre que el límite exista.
Para calcular la derivada parcial de 𝑓 con respecto a 𝑧 , consideramos a la variable
𝑥, y a la variable 𝑦 como constantes, por lo tanto:
𝜕𝑓
𝜕𝑧(𝑥0, 𝑦0, 𝑧0) = lim
ℎ→0
𝑓(𝑥0 , 𝑦0, 𝑧0 + ℎ) − 𝑓(𝑥0, 𝑦0, 𝑧0)
ℎ,
siempre que el límite exista.
Se recomienda una revisión sobre las derivadas parciales de orden superior en ([3]
págs.147-154).
Diferenciabilidad
Si f es una función de una variable tal que 𝑦 = 𝑓(𝑥) 𝑥 ∈ 𝐴 ⊂ ℝ, la diferencial de
de 𝑦 = 𝑓(𝑥) se define como 𝑑𝑦 = 𝑓´(𝑥)𝑑𝑥 , y 𝑑𝑦 se puede utilizar como una
aproximación del valor del incremento ∆𝑦 = 𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥) para ∆𝑥
pequeños. Una función de dos variables que admite una aproximación similar se
dice que es diferenciable.
Diferencial total
Si 𝑧 = 𝑓(𝑥, 𝑦) y ∆𝑥, ∆𝑦 son los incrementos de 𝑥 𝑒 𝑦 , las diferenciales de las
variables independientes de 𝑥 𝑒 𝑦 son 𝑑𝑥 = ∆𝑥 𝑑𝑦 = ∆𝑦 y la diferencial total de la
variable independiente 𝑧 es
𝑑𝑧 =𝜕𝑧
𝜕𝑥𝑑𝑥 +
𝜕𝑧
𝜕𝑦𝑑𝑦.
La definición de la diferencial total se encuentra en ([11] pág. 1136)

18
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Definición.- Una función f dada por 𝑧 = 𝑓(𝑥, 𝑦) es diferenciable en (𝑥0, 𝑦0) si ∆𝑧
puede expresarse como
∆𝑧 =𝜕𝑓
𝜕𝑥(𝑥0, 𝑦0) +
𝜕𝑓
𝜕𝑦(𝑥0, 𝑦0) + 휀1∆𝑥 + 휀2∆𝑦,
donde 휀1 y 휀2 tienden a cero cuando ∆𝑥 y ∆𝑦 tienden a cero. La función f se dice
diferenciable en una región R si es diferenciable en todo punto de R.
La definición precedente se la ha tomado de ([11] pág. 1136).
Regla de la cadena
La regla de la cadena proporciona una técnica para obtener la derivada de una
función compuesta, por ejemplo: si 𝑦 = 𝑓(𝑥) y 𝑥 = 𝑔(𝑡) , donde f y 𝑔 son
funciones diferenciables, entonces 𝑦 es indirectamente una función diferenciable
de 𝑡 y
𝑑𝑦
𝑑𝑡=𝑑𝑦
𝑑𝑥
𝑑𝑥
𝑑𝑡.
Una de las técnicas para obtener la derivada para funciones de más de una variable
se presenta a continuación:
Sea 𝑧 = 𝑓(𝑥, 𝑦) una función diferenciable de 𝑥 e 𝑦 en donde 𝑥 = 𝑔(𝑡) y 𝑦 = ℎ(𝑡)
son funciones diferenciables de 𝑡. Entonces 𝑧 es una función diferenciable de 𝑡 y
𝑑𝑧
𝑑𝑡=𝜕𝑧
𝜕𝑥
𝑑𝑥
𝑑𝑡+𝜕𝑧
𝜕𝑦
𝑑𝑦
𝑑𝑡.
Derivada direccional
Recuérdese a las derivadas parciales como razones de cambio, así, si 𝑧 = 𝑓(𝑥, 𝑦)
entonces 𝜕𝑧/𝜕𝑥 representa la razón de cambio de 𝑧 con respecto a 𝑥 considerando
a 𝑦 constante. De la misma forma 𝜕𝑧/𝜕𝑦 es la razón de cambio de 𝑧 con respecto
a 𝑦, cuando 𝑥 es fija (constante). La definición de derivada dirección la tomaremos
de ([2] págs. 775-776).

19
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La derivada direccional surge de analizar el comportamiento de 𝑧 en el punto
(𝑥0, 𝑦0) en la dirección de un vector unitario �⃗⃗� = (𝑎, 𝑏) ∈ ℝ2, es decir la razón de
cambio de la función 𝑧 = 𝑓(𝑥, 𝑦) en la dirección del vector unitario �⃗⃗�.
Considérese la figura 1.4 en el espacio tridimensional XYZ, una superficie S
definida por la ecuación 𝑧 = 𝑓(𝑥, 𝑦) , el punto 𝑃 = (𝑥0, 𝑦0, 𝑧0) en S y 𝑃′ su
proyección sobre el plano XY, la curva C intersección de S con el plano vertical
que pasa por P en la dirección de �⃗⃗�. Entonces la pendiente de la recta tangente T a
la curva C en el punto P es la razón de cambio de 𝑧 en la dirección de �⃗⃗�.
Figura 1.4 Interpretación geométrica de la derivada direccional.
Sea 𝑄 = (𝑥, 𝑦, 𝑧) otro punto de C y 𝑄′ su proyección sobre el plano XY. Las
proyecciones de P y Q sobre el plano XY forman el vector ℎ�⃗⃗� = (ℎ𝑎, ℎ𝑏), luego:
𝑥 − 𝑥0 = ℎ𝑎, entonces 𝑥 = 𝑥0 + ℎ𝑎,
𝑦 − 𝑦0 = ℎ𝑏, entonces 𝑦 = 𝑦0 + ℎ𝑏,
con estos resultados obtendremos la razón de cambio de 𝑧 con respecto a h así:
∆𝑧
ℎ=𝑧 − 𝑧0ℎ
=𝑓(𝑥, 𝑦) − 𝑓(𝑥0, 𝑦0)
ℎ=𝑓(𝑥0 + ℎ𝑎, 𝑦0 + ℎ𝑏) − 𝑓(𝑥0, 𝑦0)
ℎ,
luego tomando el límite cuando h tiende a cero,
limℎ→0
𝑓(𝑥0 + ℎ𝑎, 𝑦0 + ℎ𝑏) − 𝑓(𝑥0, 𝑦0)
ℎ,

20
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E es la razón de cambio de 𝑧 en la dirección de �⃗⃗� que la llamaremos derivada
direccional de 𝑓 en la dirección de �⃗⃗�.
Definición 1.3.-Sea f una función de dos variables 𝑥, 𝑦, sea �⃗⃗� = (𝑎, 𝑏) ∈ ℝ2 un
vector unitario. La derivada direccional de 𝑓 en el punto (𝑥0, 𝑦0) en la dirección de
�⃗⃗� que se denota 𝐷𝑢𝑓(𝑥0, 𝑦0), se define como
𝐷𝑢𝑓(𝑥0, 𝑦0) = limℎ→0
𝑓(𝑥0 + ℎ𝑎, 𝑦0 + ℎ𝑏) − 𝑓(𝑥0, 𝑦0)
ℎ,
siempre que el límite exista.
Definición tomada de ([2] pág. 776).
Teorema1.1.- Sea 𝑓 una función diferenciable de 𝑥 e 𝑦. La derivada direccional de
f en la dirección del vector unitario �⃗⃗� = (𝑎, 𝑏) es:
𝐷𝑢𝑓(𝑥, 𝑦) =𝜕
𝜕𝑥𝑓(𝑥, 𝑦)𝑎 +
𝜕
𝜕𝑦𝑓(𝑥, 𝑦)𝑏.
Demostración:
Sea la función 𝑔 de una variable h definida como:
𝑔(ℎ) = 𝑓(𝑥, 𝑦) = 𝑓(𝑥0 + ℎ𝑎, 𝑦0 + ℎ𝑏)
Se nota que 𝑥 = 𝑥0 + ℎ𝑎, 𝑦 = 𝑦0 + ℎ𝑏.
Además 𝑔(0) = 𝑓(𝑥0 − 0𝑎, 𝑦0 − 0𝑏) = 𝑓(𝑥0, 𝑦0).
(I) Calculamos la derivada de la función 𝑔 aplicando la definición
𝑔´(0) = limℎ→0
𝑔(0 + ℎ) − 𝑔(0)
ℎ= limℎ→0
𝑔(ℎ) − 𝑔(0)
ℎ
= limℎ→0
𝑓(𝑥0 + ℎ𝑎, 𝑦0 + ℎ𝑏) − 𝑓(𝑥0, 𝑦0)
ℎ= 𝐷𝑢𝑓(𝑥0, 𝑦0).
(II) calculamos 𝑔´(ℎ) utilizando la regla de la cadena
𝑔´(ℎ) =𝜕𝑓
𝜕𝑥
𝑑𝑥
𝑑ℎ+𝜕𝑓
𝜕𝑦
𝑑𝑦
𝑑ℎ=𝜕
𝜕𝑥𝑓(𝑥, 𝑦)𝑎 +
𝜕
𝜕𝑦𝑓(𝑥, 𝑦)𝑏.
Ahora, si ℎ = 0 se tiene

21
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑔´(0) =𝜕𝑓
𝜕𝑥
𝑑𝑥
𝑑ℎ+𝜕𝑓
𝜕𝑦
𝑑𝑦
𝑑ℎ=𝜕
𝜕𝑥𝑓(𝑥0, 𝑦0)𝑎 +
𝜕
𝜕𝑦𝑓(𝑥0, 𝑦0)𝑏.
Concluyendo, por los resultados de (I) y (II) tenemos:
𝐷𝑢𝑓(𝑥, 𝑦) =𝜕
𝜕𝑥𝑓(𝑥, 𝑦)𝑎 +
𝜕
𝜕𝑦𝑓(𝑥, 𝑦)𝑏.
La demostración precedente se la ha tomado de ([2] pág. 776)
Gradiente
La base canónica de ℝ2se designa con {𝑖, 𝑗}, donde 𝑖 = (1,0), 𝑗 = (0,1).
Sean �⃗� = (𝑎, 𝑏), �⃗� = (𝑐, 𝑑) ∈ ℝ2, el producto escalar en ℝ2 está definido como:
�⃗� ∙ �⃗� = 𝑎𝑐 + 𝑏𝑑,
y su norma se nota ‖∙‖ y se define como ‖�⃗�‖ = √𝑎2 + 𝑏2.
El ángulo entre los vectores �⃗� e �⃗� se define como 𝜃 ∈ [0, 𝜋] mediante
cos(𝜃) =�⃗� ∙ �⃗�
‖�⃗�‖‖�⃗�‖, �⃗� ≠ 0 , �⃗� ≠ 0,
entonces:
�⃗� ∙ �⃗� = ‖�⃗�‖‖�⃗�‖ cos(𝜃),
Si 0 ≤ 𝜃 ≤𝜋
2, 0 ≤ cos(𝜃) ≤ 1, luego �⃗� ∙ �⃗� ≥ 0.
Si 𝜋
2< 𝜃 ≤ 𝜋, −1 ≤ cos(𝜃) < 0, entonces �⃗� ∙ �⃗� < 0.
La base canónica de ℝ3se nota {𝑖, 𝑗, �⃗⃗�} con 𝑖 = (1,0,0), 𝑗 = (0,1,0), �⃗⃗� = (0,0,1).
Sean �⃗⃗� = (𝑥1, 𝑦1, 𝑧1), �⃗� = (𝑥2, 𝑦2, 𝑧2) ∈ ℝ3. El producto vectorial de �⃗⃗� por �⃗� se
nota �⃗⃗� × �⃗� y se define como:
�⃗⃗� × �⃗� = |𝑦1 𝑧1𝑦2 𝑧2
| 𝑖 − |𝑥1 𝑧1𝑥2 𝑧2
| 𝑗 + |𝑥1 𝑦1𝑥2 𝑦2
| 𝑧.

22
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Definición 1.4.- Sea 𝑧 = 𝑓(𝑥, 𝑦) una función de dos variables, entonces el
gradiente de 𝑓 denotado con ∇𝑓, es el vector ∇𝑓(𝑥, 𝑦) = (𝜕𝑓
𝜕𝑥,𝜕𝑓
𝜕𝑦) =
𝜕𝑓
𝜕𝑥𝑖 +
𝜕𝑓
𝜕𝑦𝑗.⃗⃗⃗
El operador gradiente en dimensión 2 se nota y define como:
∇=𝜕
𝜕𝑥𝑖 +
𝜕
𝜕𝑦𝑗,
mientras que en dimensión 3 se tiene:
∇=𝜕
𝜕𝑥𝑖 +
𝜕
𝜕𝑦𝑗 +
𝜕
𝜕𝑧𝑧.
Combinando la definición de derivada direccional y vector gradiente de una función
𝑓, obtenemos la fórmula de la derivada direccional 𝐷𝑢𝑓(𝑥, 𝑦) como el producto
escalar de dos vectores
𝐷𝑢𝑓(𝑥, 𝑦) =𝜕𝑓
𝜕𝑥𝑎 +
𝜕𝑓
𝜕𝑦𝑏 = (
𝜕𝑓
𝜕𝑥,𝜕𝑓
𝜕𝑦) ∙ (𝑎, 𝑏) = ∇𝑓(𝑥, 𝑦) ∙ �⃗⃗�.
Una propiedad muy importante del vector gradiente la presentamos en el siguiente
teorema.
Teorema 1.2.- Sea 𝑓 una función diferenciable en el punto (𝑥, 𝑦), el valor máximo
de la derivada direccional 𝐷𝑢𝑓(𝑥, 𝑦) es ‖∇𝑓(𝑥, 𝑦)‖ y se presenta cuando �⃗⃗� y el
vector gradiente ∇𝑓(𝑥, 𝑦) tienen la misma dirección.
Demostración
De la definición de derivada direccional tenemos:
𝐷𝑢𝑓(𝑥, 𝑦) = ∇𝑓(𝑥, 𝑦) ∙ �⃗⃗�.
De la definición de producto escalar de dos vectores tenemos
𝐷𝑢𝑓(𝑥, 𝑦) = ‖∇𝑓(𝑥, 𝑦)‖‖�⃗⃗�‖ cos 𝜃.
Sabemos que la norma de �⃗⃗� es 1, por lo tanto
𝐷𝑢𝑓(𝑥, 𝑦) = ‖∇𝑓(𝑥, 𝑦)‖ cos 𝜃.
El máximo valor de cos 𝜃 es 1, esto ocurre cuando 𝜃 = 0 , es decir cuando
�⃗⃗� tiene la misma dirección de ∇𝑓(𝑥, 𝑦) y en consecuencia:
𝐷𝑢𝑓(𝑥, 𝑦) = ‖∇𝑓(𝑥, 𝑦)‖.
La demostración del teorema 1.2 se la encuentra en ([2] pág. 780).
23
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Campos Vectoriales
Los campos vectoriales constituyen funciones de importante aplicación en la física.
Se recomienda revisar éste tema en el siguiente texto: ([2] págs. 872-903).
Sea Ω ⊂ ℝ3, F una función de Ω en ℝ3. Para cada (𝑥, 𝑦, 𝑧) ∈ Ω, 𝐹(𝑥, 𝑦, 𝑧) ∈ ℝ3,
luego, existen M, N, P funciones reales definidas en Ω (campos escalares) tales que:
𝐹(𝑥, 𝑦, 𝑧) = (𝑀(𝑥, 𝑦, 𝑧), 𝑁(𝑥, 𝑦, 𝑧), 𝑃(𝑥, 𝑦, 𝑧)) (𝑥, 𝑦, 𝑧) ∈ Ω.
El campo vectorial 𝐹(𝑥, 𝑦, 𝑧) se puede escribir simplemente como
𝐹 = 𝑀𝑖 + 𝑁𝑗 + 𝑃𝑘.⃗⃗⃗ ⃗
Son ejemplos de campos vectoriales, los campos de velocidades, los campos
electromagnéticos y los campos gravitatorios
Los campos vectoriales constan de una cantidad infinita de vectores, por lo tanto se
dibujan vectores representativos que ayudan a visualizar el campo.
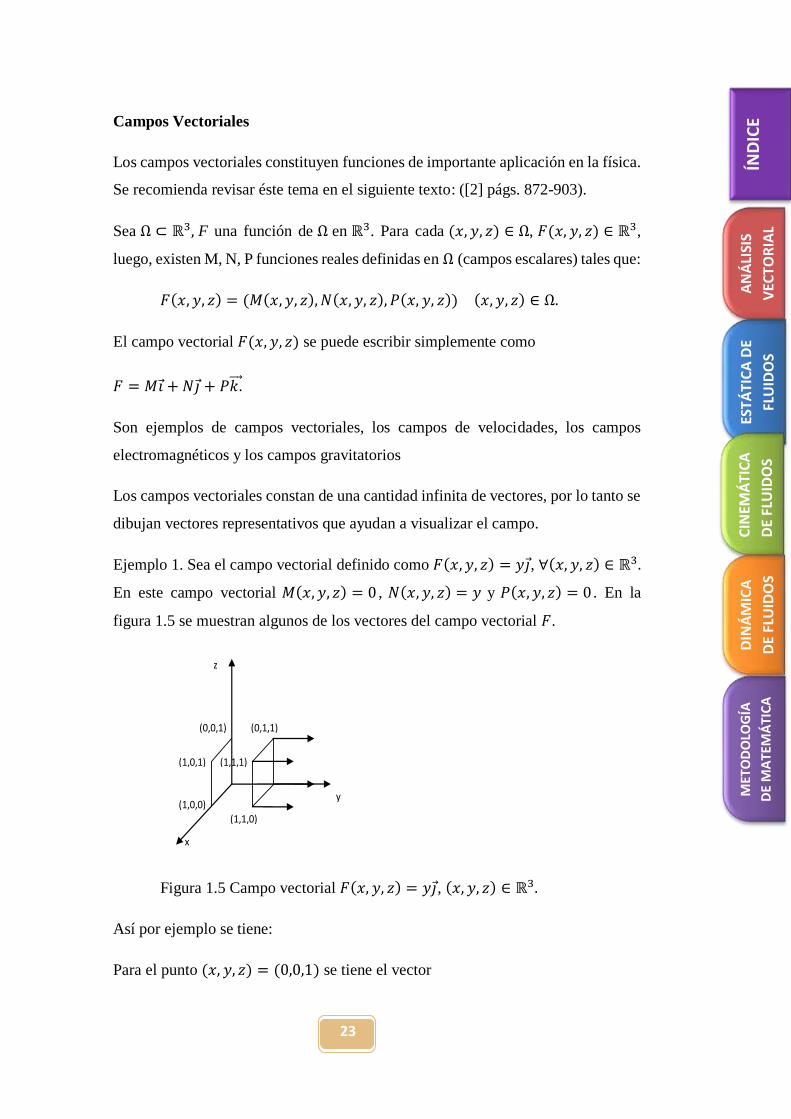
Ejemplo 1. Sea el campo vectorial definido como 𝐹(𝑥, 𝑦, 𝑧) = 𝑦𝑗, ∀(𝑥, 𝑦, 𝑧) ∈ ℝ3.
En este campo vectorial 𝑀(𝑥, 𝑦, 𝑧) = 0 , 𝑁(𝑥, 𝑦, 𝑧) = 𝑦 y 𝑃(𝑥, 𝑦, 𝑧) = 0 . En la
figura 1.5 se muestran algunos de los vectores del campo vectorial 𝐹.
z
y
x
(0,0,1)
(1,0,1)
(1,0,0)
(0,1,1)
(1,1,1)
(1,1,0)
Figura 1.5 Campo vectorial 𝐹(𝑥, 𝑦, 𝑧) = 𝑦𝑗, (𝑥, 𝑦, 𝑧) ∈ ℝ3.
Así por ejemplo se tiene:
Para el punto (𝑥, 𝑦, 𝑧) = (0,0,1) se tiene el vector
24
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝐹(𝑥, 𝑦, 𝑧) = 𝐹(0,0,1) = 𝑦𝑗 = 0𝑗.
Para el punto (𝑥, 𝑦, 𝑧) = (0,1,1) se tiene el vector
𝐹(𝑥, 𝑦, 𝑧) = 𝐹(0,1,1) = 𝑦𝑗 = 𝑗.⃗⃗⃗
Para el punto (𝑥, 𝑦, 𝑧) = (1,1,0) se tiene el vector
𝐹(𝑥, 𝑦, 𝑧) = 𝐹(1,1,0) = 𝑦𝑗 = 𝑗.⃗⃗⃗
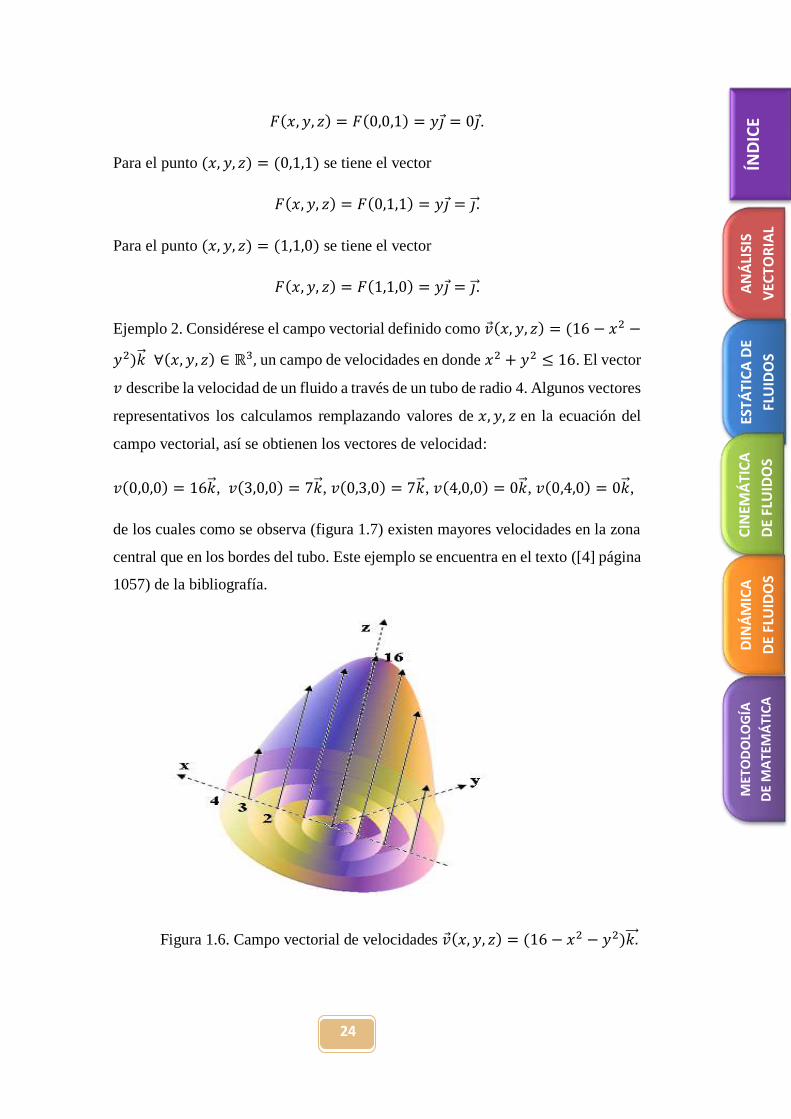
Ejemplo 2. Considérese el campo vectorial definido como �⃗�(𝑥, 𝑦, 𝑧) = (16 − 𝑥2 −
𝑦2)�⃗⃗� ∀(𝑥, 𝑦, 𝑧) ∈ ℝ3, un campo de velocidades en donde 𝑥2 + 𝑦2 ≤ 16. El vector
𝑣 describe la velocidad de un fluido a través de un tubo de radio 4. Algunos vectores
representativos los calculamos remplazando valores de 𝑥, 𝑦, 𝑧 en la ecuación del
campo vectorial, así se obtienen los vectores de velocidad:
𝑣(0,0,0) = 16�⃗⃗�, 𝑣(3,0,0) = 7�⃗⃗�, 𝑣(0,3,0) = 7�⃗⃗�, 𝑣(4,0,0) = 0�⃗⃗�, 𝑣(0,4,0) = 0�⃗⃗�,
de los cuales como se observa (figura 1.7) existen mayores velocidades en la zona
central que en los bordes del tubo. Este ejemplo se encuentra en el texto ([4] página
1057) de la bibliografía.
Figura 1.6. Campo vectorial de velocidades �⃗�(𝑥, 𝑦, 𝑧) = (16 − 𝑥2 − 𝑦2)𝑘.⃗⃗⃗ ⃗

25
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Rotacional
Tanto el rotacional y la divergencia son generalizaciones de la derivada que se
aplican a campos vectoriales. Para abordar éste tema tomaremos en cuenta el
siguiente texto: ([4] pág.1060).
Definición 1.5.- Sea 𝐹 = 𝑀𝑖 + 𝑁𝑗 + 𝑃�⃗⃗� un campo vectorial definido en Ω ⊂ ℝ3,
El rotacional del campo vectorial 𝐹 = 𝑀𝑖 + 𝑁𝑗 + 𝑃𝑘 se define como:
𝑟𝑜𝑡𝐹(𝑥, 𝑦, 𝑧) = ∇ × 𝐹(𝑥, 𝑦, 𝑧) = (𝜕𝑃
𝜕𝑦−𝜕𝑁
𝜕𝑧) 𝑖 − (
𝜕𝑃
𝜕𝑥−𝜕𝑀
𝜕𝑧) 𝑗 + (
𝜕𝑁
𝜕𝑥−𝜕𝑀
𝜕𝑦)𝑘,⃗⃗⃗ ⃗
(𝑥, 𝑦, 𝑧) ∈ Ω.
El símbolo ∇ es un operador diferencial definido como ∇= 𝑖𝜕
𝜕𝑥+ 𝑗
𝜕
𝜕𝑦+ �⃗⃗�
𝜕
𝜕𝑧 , el
cual tiene sentido cuando se aplica a una función escalar 𝑓 para producir el vector
gradiente de 𝑓
∇𝑓 = 𝑖𝜕𝑓
𝜕𝑥+ 𝑗
𝜕𝑓
𝜕𝑦+ �⃗⃗�
𝜕𝑓
𝜕𝑧=𝜕𝑓
𝜕𝑥𝑖 +
𝜕𝑓
𝜕𝑦𝑗 +
𝜕𝑓
𝜕𝑧�⃗⃗�.
Si F es un campo vectorial que representa el flujo de un fluido entonces 𝑟𝑜𝑡𝐹 = 0
significa que el fluido está libre de rotaciones o es irrotacional.
Ejemplo
Figura 1.7 Una rueda pequeña con paletas en la parte inferior no girará cuando se
está moviéndose en un fluido con un campo de velocidad �⃗⃗�(𝑥, 𝑦, 𝑧) =𝑦
𝑥2+𝑦2𝑖 −
𝑥
𝑥2+𝑦2𝑗 ( [5] página 163).
Sea el campo vectorial �⃗⃗�(𝑥, 𝑦, 𝑧) =𝑦
𝑥2+𝑦2𝑖 −
𝑥
𝑥2+𝑦2𝑗, (𝑥, 𝑦, 𝑧) ∈ ℝ3 que representa
el campo de velocidad del agua en movimiento circular. Algunos de los vectores de

26
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E velocidad se dibujan en el plano (figura 1.7), este campo vectorial es irrotacional
ya que 𝑟𝑜𝑡 �⃗⃗� = 0 como se comprueba a continuación.
Si �⃗⃗�(𝑥, 𝑦, 𝑧) = (𝑀𝑖 + 𝑁𝑗 + 𝑃�⃗⃗�) =𝑦
𝑥2+𝑦2𝑖 −
𝑥
𝑥2+𝑦2𝑗 entonces
𝑀 =𝑦
𝑥2+𝑦2 , 𝑁 = −
𝑥
𝑥2+𝑦2 , 𝑃 = 0,
por la definición de rotacional se tiene:
𝑟𝑜𝑡�⃗⃗�(𝑥, 𝑦, 𝑧) = ∇ × �⃗⃗�(𝑥, 𝑦, 𝑧)
= (𝑖𝜕
𝜕𝑥+ 𝑗
𝜕
𝜕𝑦+ �⃗⃗�
𝜕
𝜕𝑧) × (𝑀𝑖 + 𝑁𝑗 + 𝑃�⃗⃗�)
= (𝜕𝑃
𝜕𝑦−𝜕𝑁
𝜕𝑧) 𝑖 − (
𝜕𝑃
𝜕𝑥−𝜕𝑀
𝜕𝑧) 𝑗 + (
𝜕𝑁
𝜕𝑥−𝜕𝑀
𝜕𝑦)𝑘,
reemplazando M,N, y P tenemos:
𝑟𝑜𝑡�⃗⃗�(𝑥, 𝑦, 𝑧) = (𝜕0
𝜕𝑦−𝜕
𝜕𝑧(−
𝑥
𝑥2 + 𝑦2)) 𝑖 − (
𝜕0
𝜕𝑥−𝜕
𝜕𝑧(
𝑦
𝑥2 + 𝑦2)) 𝑗
+ (𝜕
𝜕𝑥(−
𝑥
𝑥2 + 𝑦2) −
𝜕
𝜕𝑦(
𝑦
𝑥2 + 𝑦2))𝑘.
calculando las derivadas parciales resulta:
𝑟𝑜𝑡�⃗⃗�(𝑥, 𝑦, 𝑧) = (0 − 0)𝑖 − (0 − 0)𝑗
+ (−(𝑥2 + 𝑦2) + 2𝑥2
(𝑥2 + 𝑦2)2+−(𝑥2 + 𝑦2) + 2𝑦2
(𝑥2 + 𝑦2)2)𝑘
= 0𝑖 − 0𝑗 + (𝑥2 − 𝑦2 − 𝑥2 + 𝑦2
(𝑥2 + 𝑦2)2)𝑘 = 0.
Divergencia
El rotacional de un campo vectorial F es un campo vectorial, mientras que la
divergencia es una función escalar.

27
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Definición 1.6.- Sean Ω ⊂ ℝ3, F un campo vectorial de Ω en ℝ3. La divergencia de
𝐹 = 𝑀𝑖 + 𝑁𝑗 + 𝑃𝑘 se define como
𝑑𝑖𝑣𝐹(𝑥, 𝑦, 𝑧) = ∇ ∙ 𝐹(𝑥, 𝑦) = [(𝜕
𝜕𝑥) 𝑖 + (
𝜕
𝜕𝑦) 𝑗 + (
𝜕
𝜕𝑧) 𝑘] ∙ (𝑀𝑖 + 𝑁𝑗 + 𝑃𝑘)
=𝜕𝑀
𝜕𝑥+𝜕𝑁
𝜕𝑦+𝜕𝑃
𝜕𝑧.
Si 𝑑𝑖𝑣 𝐹 = 0, entonces se dice que el campo vectorial F es de divergencia nula.
La divergencia es un tipo de derivadas del campo F, por ejemplo, para campos de
velocidades de partículas, la divergencia mide el flujo de partículas por unidad de
volumen en un punto. En hidrodinámica si un campo de velocidades tiene
divergencia nula, entonces se le llama flujo incompresible. Para profundizar sobre
éste tema se recomienda revisar el texto ([4]pág. 1062) de la bibliografía.
1.4.- Integrales dobles, triples.
Figura 1.8 Interpretación de una integral doble ( [2] pág. 809).
Integrales dobles.
Comprenderemos la definición de la integral doble, mediante una idea intuitiva que
surge del problema de hallar el volumen V de una región en el espacio ([4] pág.
990), acotada por una función de dos variables 𝑓(𝑥, 𝑦), su dominio: un rectángulo
R, y los cuatro planos verticales 𝑥 = 𝑎, 𝑥 = 𝑏, 𝑦 = 𝑐, 𝑦 = 𝑑 (figura 1.8), de la
misma manera que para la integral de Riemman, haremos una partición P del
rectángulo R cuyos lados son los intervalos [𝑎, 𝑏] y [𝑐, 𝑑] de manera que:

28
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝑎 = 𝑥0 < 𝑥1 < 𝑥2 < . . . . < 𝑥𝑛−1 < 𝑥𝑛 = 𝑏
y c= 𝑦0 < 𝑦1 < 𝑦2 < . . . . < 𝑦𝑛−1 < 𝑦𝑛 = 𝑑 . Luego, la región rectangular R
queda subdivida en nxn rectángulos de área ∆𝑥∆𝑦 = ∆𝐴𝑖.
Definiremos a la norma de P que se denota ‖𝑃‖ como la longitud de la diagonal
más larga de los n rectángulos. Escogemos un punto (𝑥𝑖 , 𝑦𝑖) en cada rectángulo y
se forma un prisma rectangular de altura 𝑓(𝑥𝑖 , 𝑦𝑖) y volumen 𝑉𝑖 = 𝑓(𝑥𝑖 , 𝑦𝑖)∆𝐴𝑖.
Luego, el volumen de la región sólida se puede aproximar por la suma de Riemann
de todos los n-prismas mediante:
∑𝑓(𝑥𝑖 , 𝑦𝑖)∆𝐴𝑖 .
𝑛
𝑖=1
Concluimos observando que si tomamos particiones más finas, se obtendrán
mejores aproximaciones del volumen y, el volumen exacto se obtendrá tomando el
límite cuando‖𝑃‖ → 0, es decir,
𝑉 = lim‖𝑃‖→0
∑𝑓(𝑥𝑖 , 𝑦𝑖)∆𝐴𝑖,
𝑛
𝑖=1
siempre que el límite exista.
Definición 1.7.- Sea f una función definida sobre una región cerrada y acotada R
del plano XY, entonces la integral doble de f sobre R se define como:
∬𝑓(𝑥, 𝑦)𝑑𝐴 =
𝑅
lim‖𝑃‖→0
∑𝑓(𝑥𝑖 , 𝑦𝑖)∆𝐴𝑖
𝑛
𝑖=1
,
siempre que el límite exista, en tal caso se dice que f es integrable en R
La definición 1.7 se encuentra en ([4] pág. 992).
Integrales triples
Para dar una definición de la integral triple utilizaremos el mismo procedimiento
que para la integral doble, como se indica en el siguiente texto: ([4] pág. 1024).
Trataremos de evaluar la integral sobre una región sólida Q (figura 1.9).
29
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
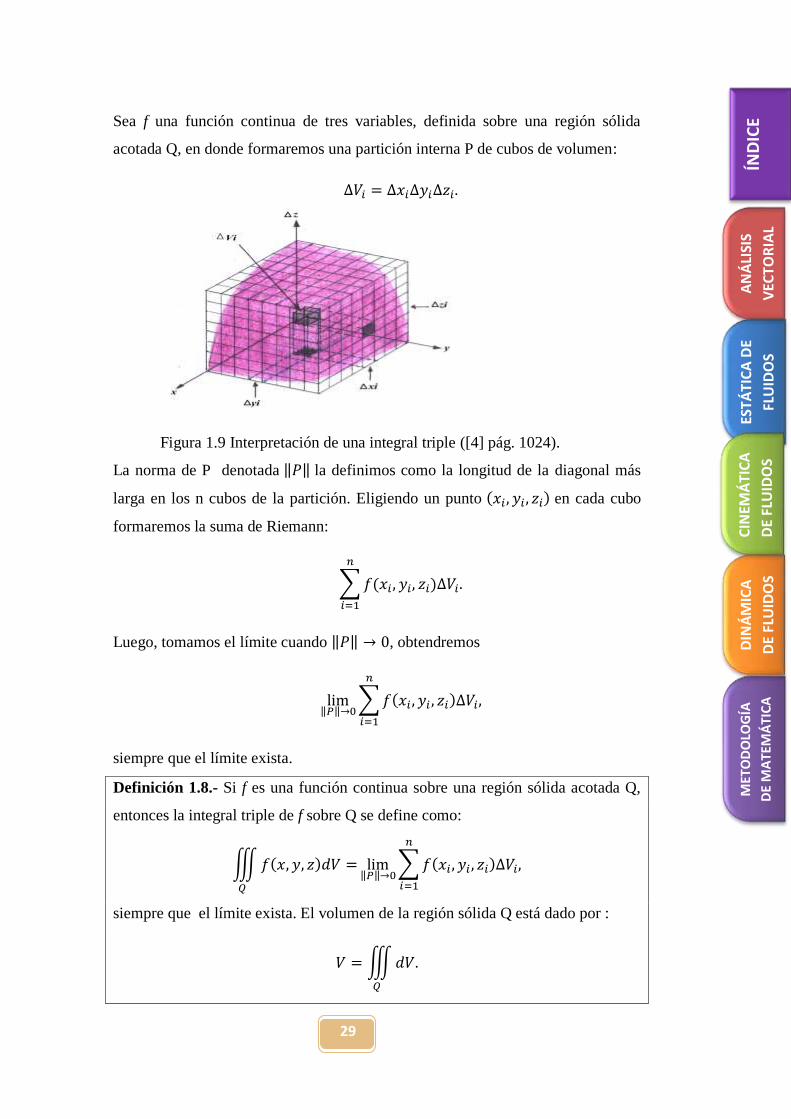
E Sea f una función continua de tres variables, definida sobre una región sólida
acotada Q, en donde formaremos una partición interna P de cubos de volumen:
∆𝑉𝑖 = ∆𝑥𝑖∆𝑦𝑖∆𝑧𝑖.
Figura 1.9 Interpretación de una integral triple ([4] pág. 1024).
La norma de P denotada ‖𝑃‖ la definimos como la longitud de la diagonal más
larga en los n cubos de la partición. Eligiendo un punto (𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖) en cada cubo
formaremos la suma de Riemann:
∑𝑓(𝑥𝑖 , 𝑦𝑖, 𝑧𝑖)∆𝑉𝑖
𝑛
𝑖=1
.
Luego, tomamos el límite cuando ‖𝑃‖ → 0, obtendremos
lim‖𝑃‖→0
∑𝑓(𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖)∆𝑉𝑖,
𝑛
𝑖=1
siempre que el límite exista.
Definición 1.8.- Si f es una función continua sobre una región sólida acotada Q,
entonces la integral triple de f sobre Q se define como:
∭𝑓(𝑥, 𝑦, 𝑧)𝑑𝑉 =
𝑄
lim‖𝑃‖→0
∑𝑓(𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖)∆𝑉𝑖,
𝑛
𝑖=1
siempre que el límite exista. El volumen de la región sólida Q está dado por :
𝑉 =∭𝑑𝑉.
𝑄
30
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 1.5.- Integrales de línea. Integrales de superficie
Integral de línea.
Una integral de línea es aquella que se integra en una curva C, a diferencia de la
integral sencilla que se integra en un intervalo [𝑎, 𝑏].
Sean 𝐼 ⊂ ℝ, �⃗� una función de I en ℝ2, �⃗� se llama función vectorial. Escribiremos
�⃗� = (𝛼1, 𝛼2), y para 𝑡 ∈ 𝐼, �⃗�(𝑡) = (𝛼1(𝑡), 𝛼2(𝑡)) = 𝛼1(𝑡)𝑖 + 𝛼2(𝑡)𝑗.
El conjunto Γ = {�⃗�(𝑡) ∈ ℝ2/𝑡 ∈ 𝐼} se llama camino o curva generada por la
función vectorial �⃗�
Si �⃗� es continua, el camino Γ se dice camino continuo.
En el caso en que 𝐼 = [𝑎, 𝑏] y �⃗� es continua tal que �⃗�(𝑎) = �⃗�(𝑏) = 0, el camino Γ
se llama camino cerrado continuo.
Ejemplos
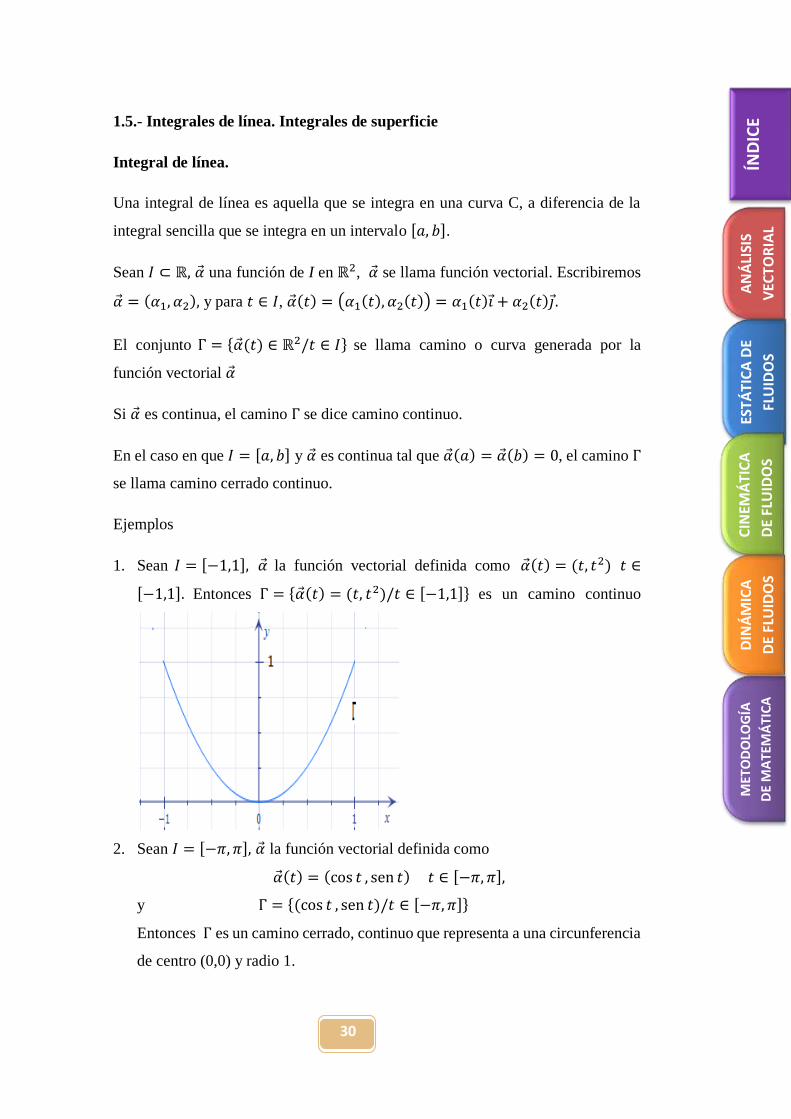
1. Sean 𝐼 = [−1,1], �⃗� la función vectorial definida como �⃗�(𝑡) = (𝑡, 𝑡2) 𝑡 ∈
[−1,1]. Entonces Γ = {�⃗�(𝑡) = (𝑡, 𝑡2)/𝑡 ∈ [−1,1]} es un camino continuo
2. Sean 𝐼 = [−𝜋, 𝜋], �⃗� la función vectorial definida como
�⃗�(𝑡) = (cos 𝑡 , sen 𝑡) 𝑡 ∈ [−𝜋, 𝜋],
y Γ = {(cos 𝑡 , sen 𝑡)/𝑡 ∈ [−𝜋, 𝜋]}
Entonces Γ es un camino cerrado, continuo que representa a una circunferencia
de centro (0,0) y radio 1.

31
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Sean 𝐼 ⊂ ℝ, �⃗� una función de I en ℝ3, �⃗� se llama función vectorial. Escribiremos
�⃗� = (𝛼1, 𝛼2, 𝛼2), y para 𝑡 ∈ 𝐼:
�⃗�(𝑡) = (𝛼1(𝑡), 𝛼2(𝑡), 𝛼3(𝑡)) = 𝛼1(𝑡)𝑖 + 𝛼2(𝑡)𝑗+𝛼3(𝑡)�⃗⃗�.
El conjunto Γ = {�⃗�(𝑡) ∈ ℝ3/𝑡 ∈ 𝐼} se llama camino o curva generada por la
función vectorial �⃗�.
Si �⃗� es continua, el camino Γ se dice camino continuo.
En el caso en que 𝐼 = [𝑎, 𝑏] y �⃗� es continua tal que �⃗�(𝑎) = �⃗�(𝑏) = 0, el camino Γ
se llama camino cerrado continuo.
Ejemplo
Sean 𝐼 = [0,∞[, �⃗� la función vectorial definida como �⃗�(𝑡) = (cos 𝑡 , 𝑠𝑒𝑛 𝑡, 𝑘𝑡)
𝑡 ≥ 0. Entonces Γ = {�⃗�(𝑡)/𝑡 ≥ 0} describe una curva en el espacio (tornillo).
A continuación se resumen las definiciones de integral de línea del texto ([2]
págs.876-877).
32
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
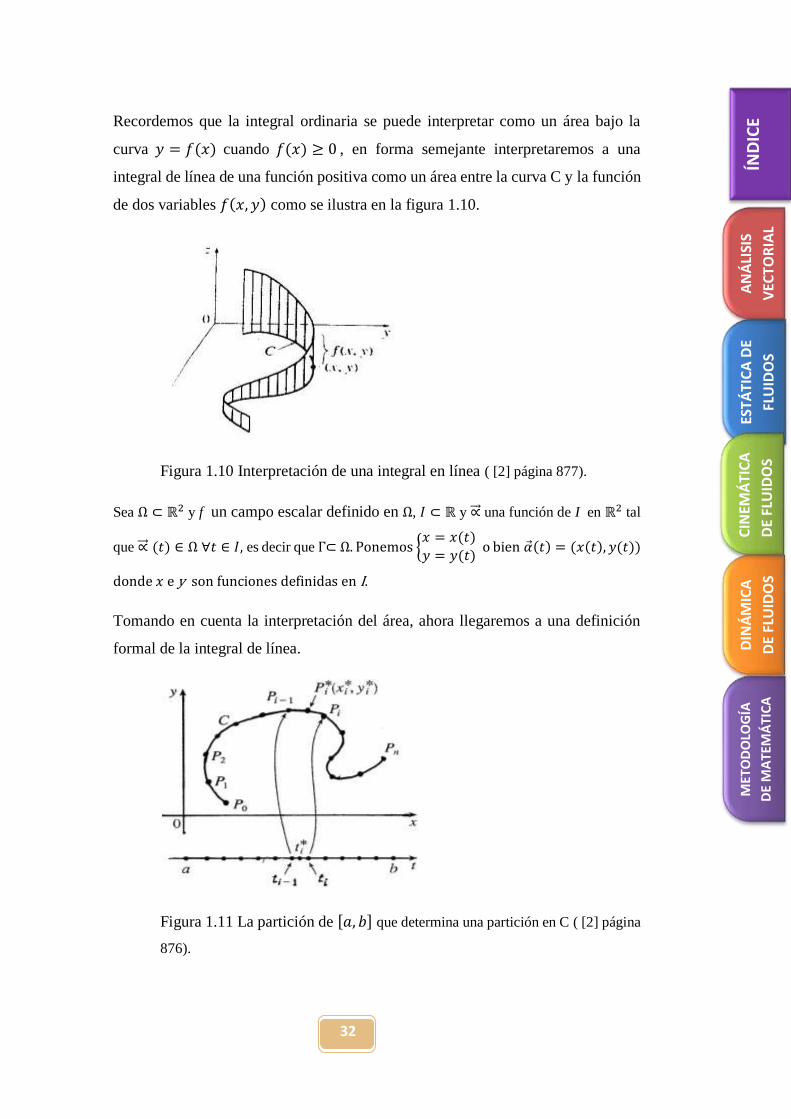
E Recordemos que la integral ordinaria se puede interpretar como un área bajo la
curva 𝑦 = 𝑓(𝑥) cuando 𝑓(𝑥) ≥ 0 , en forma semejante interpretaremos a una
integral de línea de una función positiva como un área entre la curva C y la función
de dos variables 𝑓(𝑥, 𝑦) como se ilustra en la figura 1.10.
Figura 1.10 Interpretación de una integral en línea ( [2] página 877).
Sea Ω ⊂ ℝ2 y f un campo escalar definido en Ω, 𝐼 ⊂ ℝ y ∝⃗⃗⃗ una función de I en ℝ2 tal
que ∝⃗⃗⃗ (𝑡) ∈ Ω ∀𝑡 ∈ 𝐼, es decir que Γ⊂ Ω. Ponemos {𝑥 = 𝑥(𝑡)
𝑦 = 𝑦(𝑡) o bien �⃗�(𝑡) = (𝑥(𝑡), 𝑦(𝑡))
donde 𝑥 e y son funciones definidas en I.
Tomando en cuenta la interpretación del área, ahora llegaremos a una definición
formal de la integral de línea.
Figura 1.11 La partición de [𝑎, 𝑏] que determina una partición en C ( [2] página
876).

33
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Particionamos el intervalo [𝑎, 𝑏] (figura 1.11) con puntos 𝑡𝑖 que determinan en la
curva C una partición P con puntos 𝑃𝑖(𝑥𝑖 , 𝑦𝑖), los cuales dividen a la curva C en n
subarcos de longitud ∆𝑠𝑖. Ubicamos un punto 𝑡𝑖∗ perteneciente al intervalo [𝑡𝑖−1, 𝑡𝑖]
que determina en la curva C el punto 𝑃𝑖∗(𝑥𝑖
∗, 𝑦𝑖∗). Luego evaluamos f en cada punto
(𝑥𝑖∗, 𝑦𝑖
∗) y multiplicando por cada longitud ∆𝑠𝑖 se obtiene la sumatoria
∑𝑓(𝑥𝑖∗, 𝑦𝑖
∗)∆𝑠𝑖.
𝑛
𝑖=1
Definición 1.9.- Sea Ω ⊂ ℝ2 y f un campo escalar definido en Ω, Γ un camino
contenido en Ω generado por la función vectorial ∝⃗⃗⃗ definida en 𝐼 ⊂ ℝ . Ponemos
�⃗�(𝑡) = (𝑥(𝑡), 𝑦(𝑡)).
Entonces la integral de línea de f a lo largo de la curva C= Γ es
∫ 𝑓(𝑥, 𝑦)𝑑𝑠𝐶
= lim‖𝑃‖→0
∑𝑓(𝑥𝑖∗, 𝑦𝑖
∗)∆𝑠𝑖
𝑛
𝑖=1
.
siempre que el límite exista.
Expresando las variables en función de t y aplicando la fórmula de la longitud de
arco, la integral de línea se evalúa y se expresa en la forma:
∫ 𝑓(𝑥, 𝑦)𝑑𝑠𝐶
= ∫ 𝑓(𝑥(𝑡), 𝑦(𝑡))√(𝑑𝑥
𝑑𝑡)2
+ (𝑑𝑦
𝑑𝑡)2𝑏
𝑎
𝑑𝑡.
En forma vectorial tenemos:
∫ 𝑓(𝑥, 𝑦)𝑑𝑠𝐶
= ∫ 𝑓(�⃗�(𝑡))|�⃗�´(𝑡)|𝑏
𝑎
𝑑𝑡.
Integrales de línea en el espacio
Las integrales de línea en el espacio las resumiremos de ([2] pág. 881). Sea f una
función de Ω ⊂ ℝ3 en ℝ, ∝⃗⃗⃗ una función vectorial de 𝐼 ⊂ ℝ en ℝ3 tal que Γ = {�⃗�(𝑡)/𝑡 ∈
𝐼} ⊂ Ω. Ponemos �⃗�(𝑡) = (𝑥(𝑡), 𝑦(𝑡), 𝑧(𝑡)).
La integral en línea de f a lo largo de Γ se define como:

34
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
∫ 𝑓(𝑥, 𝑦, 𝑧)𝑑𝑠Γ
= lim‖𝑃‖→0
∑𝑓(𝑥𝑖∗, 𝑦𝑖
∗, 𝑧𝑖∗)∆𝑠𝑖.
𝑛
𝑖=1
siempre que el límite exista.
Esta integral se evalúa en forma similar a la integral sobre la curva C cuando f es
función de dos variables, así:
∫ 𝑓(𝑥, 𝑦, 𝑧)𝑑𝑠𝐶
= ∫ 𝑓(𝑥(𝑡), 𝑦(𝑡), 𝑧(𝑦))√(𝑑𝑥
𝑑𝑡)2
+ (𝑑𝑦
𝑑𝑡)2
+ (𝑑𝑧
𝑑𝑡)2𝑏
𝑎
𝑑𝑡.
mientras que en forma vectorial se tiene
∫ 𝑓(𝑥, 𝑦, 𝑧)𝑑𝑠𝐶
= ∫ 𝑓(�⃗�(𝑡))|�⃗�´(𝑡)|𝑏
𝑎
𝑑𝑡.
Integral en línea de campos vectoriales
Se ha revisado las integrales en línea de un campo escalar f definido en Ω ⊂ ℝ2 y en
Ω ⊂ ℝ3. En esta sección se extiende la definición de la integral en línea para un
campo vectorial
Definición 1.10.- Sea F un campo vectorial continuo definido en una curva suave
C descrita mediante una función vectorial 𝑟(𝑡), 𝑎 ≤ 𝑡 ≤ 𝑏. Entonces la integral de
línea del campo vectorial F a lo largo de la curva C es:
∫ 𝐹 ∙ 𝑑𝑟 = ∫𝐹(𝑟(𝑡)) ∙ 𝑟´(𝑡)𝑑𝑡
𝑏
𝑎
=𝐶
∫ 𝐹 ∙ 𝑇𝑑𝑠𝐶
,
donde T representa los vectores unitarios tangentes a la curva C.
Las integrales en línea se han resumido de: ([2] págs. 876-877).
35
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Integral de superficie
Mientras la integral en línea extiende la integral simple sobre un intervalo a una
curva en dos o tres dimensiones, la integral de superficie extiende la integral doble
sobre una región plana a una integral sobre una superficie en dos dimensiones.
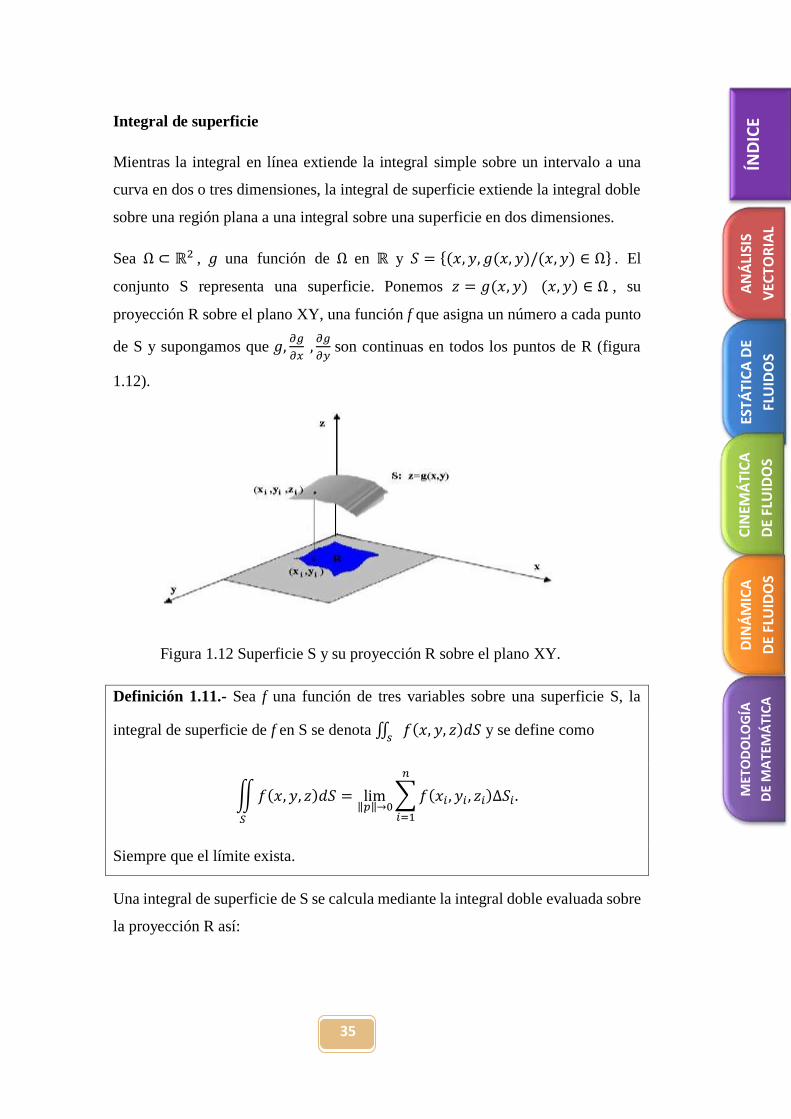
Sea Ω ⊂ ℝ2 , 𝑔 una función de Ω en ℝ y 𝑆 = {(𝑥, 𝑦, 𝑔(𝑥, 𝑦)/(𝑥, 𝑦) ∈ Ω} . El
conjunto S representa una superficie. Ponemos 𝑧 = 𝑔(𝑥, 𝑦) (𝑥, 𝑦) ∈ Ω , su
proyección R sobre el plano XY, una función f que asigna un número a cada punto
de S y supongamos que 𝑔,𝜕𝑔
𝜕𝑥 ,𝜕𝑔
𝜕𝑦 son continuas en todos los puntos de R (figura
1.12).
Figura 1.12 Superficie S y su proyección R sobre el plano XY.
Definición 1.11.- Sea f una función de tres variables sobre una superficie S, la
integral de superficie de f en S se denota ∬ 𝑓(𝑥, 𝑦, 𝑧)𝑑𝑆𝑠
y se define como
∬𝑓(𝑥, 𝑦, 𝑧)𝑑𝑆
𝑆
= lim‖𝑝‖→0
∑𝑓(𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖)∆𝑆𝑖 .
𝑛
𝑖=1
Siempre que el límite exista.
Una integral de superficie de S se calcula mediante la integral doble evaluada sobre
la proyección R así:

36
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
∬𝑓(𝑥, 𝑦, 𝑧)𝑑𝑆
𝑆
=∬𝑓(𝑥, 𝑦, 𝑔(𝑥, 𝑦))√1 + (𝜕𝑧
𝜕𝑥)2
+ (𝜕𝑧
𝜕𝑦)2
𝑅
𝑑𝐴
El tema desarrollado se ha resumido de ([4] pág. 1108).
Superficies paramétricas
Una superficie S se puede describir mediante la función vectorial 𝑟(𝑢, 𝑣) =
𝑥(𝑢, 𝑣)𝑖 + 𝑦(𝑢, 𝑣)𝑗 + 𝑧(𝑢, 𝑣)�⃗⃗� definida en una región D del plano uv. Todos los
puntos (𝑥, 𝑦, 𝑧) en el espacio definidos mediante las ecuaciones paramétricas 𝑥 =
𝑥(𝑢, 𝑣), 𝑦 = 𝑦(𝑢, 𝑣), 𝑧 = 𝑧(𝑢, 𝑣) forman la superficie paramétrica S (figura 1.13)
Figura 1.13 Superficie paramétrica S ([2],página 910).
Definición 1.12.- Sea S una superficie paramétrica con dominio en todo punto
(𝑢, 𝑣) ∈ 𝐷 , definida por la ecuación vectorial 𝑟(𝑢, 𝑣) = 𝑥(𝑢, 𝑣)𝑖 + 𝑦(𝑢, 𝑣)𝑗 +
𝑧(𝑢, 𝑣)�⃗⃗� entonces la integral
∬|𝑟𝑢 × 𝑟𝑣|𝑑𝐴
𝐷
= 𝐴(𝑆),
es el área de superficie de S, donde 𝑟𝑢 =𝜕𝑥
𝜕𝑢𝑖 +
𝜕𝑦
𝜕𝑢𝑗 +
𝜕𝑧
𝜕𝑢�⃗⃗�, 𝑟𝑣 =
𝜕𝑥
𝜕𝑣𝑖 +
𝜕𝑦
𝜕𝑣𝑗 +
𝜕𝑧
𝜕�⃗⃗�
La definición 1.12 se la ha tomado de [2] pág. 91.
37
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 1.6.- Teoremas de transporte de Reynolds.
En mecánica de fluidos se estudia el movimiento de fluidos sin analizar las fuerzas
que lo producen. El movimiento de fluidos se describe mediante dos formas; la
descripción lagrangiana que sigue la trayectoria de la partícula o grupo de partículas
del fluido, y, la descripción euleriana en la cual se define un volumen de control
(VC) a través del cual el fluido entra o sale.
El teorema de transporte de Reynolds (TTR) se utiliza para transformar las
ecuaciones del movimiento de la descripción lagrangiana a la descripción euleriana
de un volumen de control, así la ecuación:
𝑑𝑁𝑠𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶𝑑𝑡
+ 𝑁𝑠𝑎𝑙 −𝑁𝑒𝑛𝑡,
indica que: la razón de cambio con respecto al tiempo de la propiedad N del
sistema(st) es igual a la razón de cambio con respecto al tiempo de N en el volumen
de control más el flujo neto de N hacia afuera del volumen de control debido a la
masa que cruza la superficie de control(SC).
La propiedad N, llamada también propiedad extensiva como la masa, la energía, el
volumen, la cantidad de movimiento, pueden transformarse en propiedades
intensivas ,mediante mediciones distributivas como por ejemplo el volumen por
unidad de masa 𝑉
𝑚 o la energía por unidad de masa
𝐸
𝑚. La distribución de la
propiedad N por unidad de masa se la llamará 𝜂, es decir 𝜂 =𝑁
𝑚, luego la cantidad
total de N dentro del volumen de control será 𝑁 =∭𝜌𝜂𝑑𝑉 donde 𝑑𝑉 representa
un elemento de volumen. Con estas consideraciones la ecuación anterior, como se
probará en el capítulo 3 conduce al TTR para un volumen de control fijo:
𝑑𝑁𝑠𝑡𝑑𝑡
=𝑑
𝑑𝑡∭𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴.
𝑆𝐶
Si la derivada respecto al tiempo 𝑑
𝑑𝑡 de la integral triple, se la introduce dentro de
la integral, debido a que el volumen de control no varía con el tiempo, ésta se
transforma en una derivada parcial 𝜕
𝜕𝑡 ya que tanto la densidad (ρ) como la

38
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E propiedad (𝜂) pueden depender de la posición dentro del volumen de control,
entonces se tiene una forma alternativa del TTR para un volumen de control fijo:
𝑑𝑁𝑠𝑡𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴.
𝑆𝐶
Luego si el volumen de control esta en movimiento o sufre deformación, la
velocidad absoluta (�⃗�) se reemplaza por la velocidad relativa �⃗�𝑟 = �⃗� − �⃗�𝑆𝐶 , así se
obtiene el TTR para un volumen de control no fijo:
𝑑𝑁𝑠𝑡𝑑𝑡
=𝑑
𝑑𝑡∭𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌𝑣𝑟⃗⃗ ⃗⃗ ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
y su forma alternativa
𝑑𝑁𝑠𝑡𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌𝑣𝑟⃗⃗ ⃗⃗ ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
.
Por último, si la propiedad N dentro del volumen de control permanece constante,
su razón de cambio respecto al tiempo es cero, este es un tipo de flujo se llama
permanente o estacionario, entonces se tiene el TTR para un flujo estacionario:
𝑑𝑁𝑠𝑡𝑑𝑡
=∬𝜂𝜌𝑣𝑟⃗⃗ ⃗⃗ ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
.
Una explicación más detallada del TTR la encontraremos en ([6] pág. 121-127; [7]
pág. 148-156).
39
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CAPITULO 2
MODELOS MATEMÁTICOS EN ESTÁTICA DE FLUIDOS.
Resumen
Se inicia este capítulo considerando los conceptos básicos en mecánica de fluidos
con las definiciones de fluido, estática de fluidos, el continuo, la densidad, el
esfuerzo en un punto, luego se analiza la presión de un fluido en reposo y la
variación de ésta con la altura. Se analiza el principio de Arquímedes y la fuerza de
flotación. Por último se presentan algunas aplicaciones de la estática de fluidos
como son el batiscafo, el manómetro, el hidrómetro y las máquinas multiplicadoras
de fuerzas.
En cada tema tratado se indica la bibliografía utilizada y los textos recomendados
para aclarar y profundizar el presente trabajo.
2.1.- Algunos conceptos básicos en mecánica de fluidos.
Fluido.- Un fluido es toda aquella sustancia que se deforma constantemente cuando
se le aplica un esfuerzo cortante. Son ejemplos de fluidos, los líquidos y gases,
pero otros materiales como el vidrio también se consideran fluidos aunque su
deformación es tan lenta que no es práctico considerarlo como un fluido.
Estática de fluidos.- Es el estudio de fluidos en reposo o en situaciones de
equilibrio. Se basa en la primera y tercera leyes de Newton.
Dinámica de fluidos.- Estudia los fluidos en movimiento. Es una de las ramas más
complejas de la mecánica
Continuo.- El “continuo” es un fluido considerado como una distribución continua
de materia. Esta consideración se la hace de acuerdo al caso de estudio y siempre
que el volumen de fluido contenga un número suficiente de moléculas como para
realizar cálculos estadísticos.
Densidad en un punto.- La densidad de un fluido es la cantidad de masa por unidad
de volumen, entonces la densidad en un punto se define como:

40
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝜌 = lim∆𝑉→𝛿𝑉
∆𝑚
∆𝑉,
(2.1)
donde:
∆𝑚 = cantidad de masa (en kg).
∆𝑉= volumen (en 𝑚3).
𝛿𝑉= mínimo volumen para el cual tienen sentido los promedios estadísticos.
Se asume que la densidad 𝜌 es una función definida en Ω ⊂ ℝ3 al igual que la
masa m.
Fluido compresible e incompresible.- Los fluidos cuya densidad permanece
constante cuando la presión y la temperatura varían como el agua, se les llama
incompresibles, el aire no cumple esta propiedad, por lo tanto se considera un fluido
compresible.
Esfuerzo en un punto.- La componente normal de una fuerza que actúa sobre una
superficie, por unidad de área se llama esfuerzo normal, y la componente
tangencial de una fuerza que actúa sobre una superficie, por unidad de área se llama
esfuerzo cortante. . Se supone que 𝐹 es una función definida en Ω ⊂ ℝ3, es decir
𝐹 = 𝐹(𝑥, 𝑦, 𝑧) (𝑥, 𝑦, 𝑧) ⊂ Ω.
Se define al esfuerzo en un punto como:
lim∆𝐴→𝛿𝐴
∆𝐹
∆𝐴,
donde:
∆𝐹 = fuerza aplicada sobre una superficie (en néwtones N).
∆𝐴= Área considerada (en 𝑚2).
𝛿𝐴= Mínimo valor del área para el cual tienen sentido los promedios estadísticos.
Si el esfuerzo es perpendicular a la superficie, se tiene un esfuerzo normal (𝜎𝑖𝑖).

41
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Si el esfuerzo es paralelo a la superficie del fluido, entonces se tiene un esfuerzo
cortante ( 𝜏𝑖𝑗), así, tenemos los siguientes límites:
Esfuerzo normal lim∆𝐴→𝛿𝐴
∆𝐹𝑛∆𝐴
= 𝜎𝑖𝑖 𝑖 = 𝑥, 𝑦, 𝑧 2.2a
Esfuerzo cortante lim∆𝐴→𝛿𝐴
∆𝐹
∆𝐴= 𝜏𝑖𝑗 𝑖, 𝑗 = 𝑥, 𝑦, 𝑧
2.2b
Las ecuaciones del esfuerzo normal y cortante se proponen en: ([8]págs. 23-25)
Figura 2.1 Algunos esfuerzos aplicados en un elemento diferencial de
volumen.
Se utilizan dos subíndices, el primero indica la dirección de la normal al plano
asociado con el esfuerzo, el segundo indica la dirección del eje del esfuerzo mismo.
Por ejemplo en la figura 2.1 se grafican algunos de los esfuerzos correspondientes
a un elemento diferencial de volumen, así, 𝜎𝑥𝑥 es el esfuerzo normal al plano 𝑦𝑧
(primer subindice) en la dirección del eje x (segundo subindice); 𝜎𝑦𝑦 es el esfuerzo
normal al plano 𝑥𝑧 (primer subindice) en la dirección y (segundo subindice); 𝜏𝑦𝑥
es el esfuerzo aplicado en el plano 𝑥𝑧, que tiene la dirección del eje x. El esfuerzo
cortante 𝜏𝑦𝑥|𝑦 está aplicado en la posición y, mientras que 𝜏𝑦𝑥|𝑦+∆𝑦 está aplicado
en la posición y+∆y.
Se supondrá que 𝜎𝑖𝑖 y 𝜏𝑖𝑗 𝑖, 𝑗 = 𝑥, 𝑦, 𝑧 son funciones definidas en el conjunto
Ω ⊂ ℝ3.
42
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
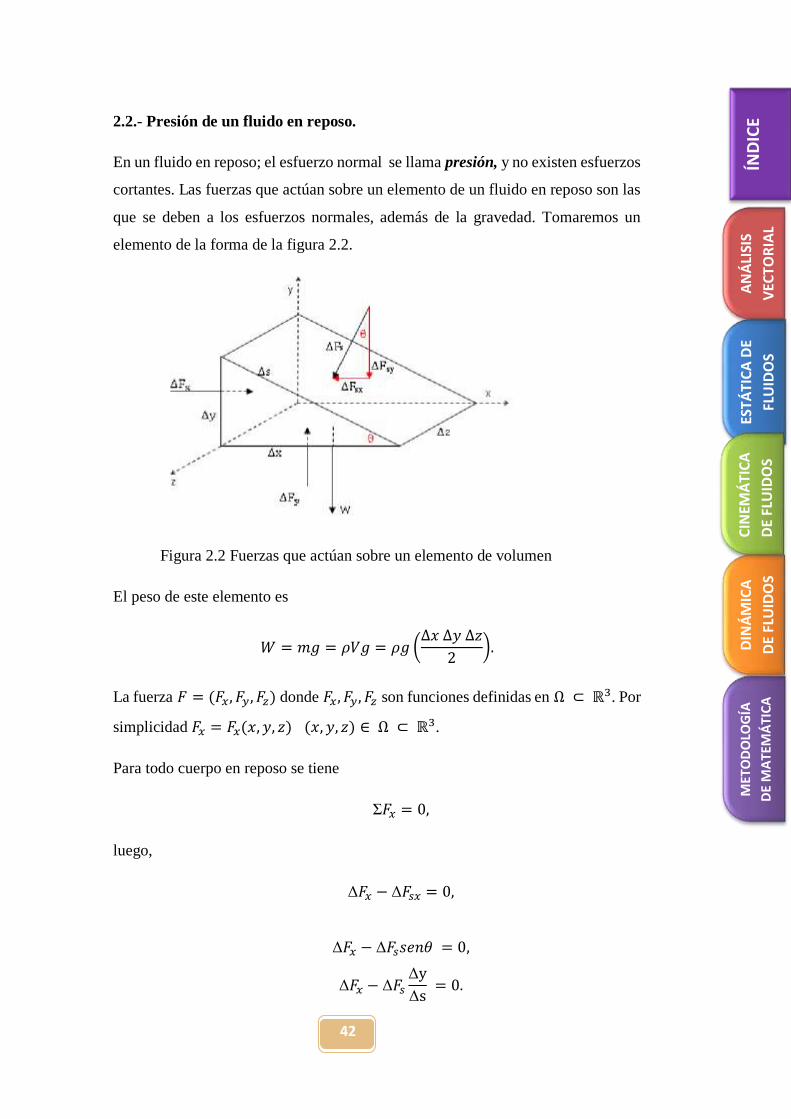
E 2.2.- Presión de un fluido en reposo.
En un fluido en reposo; el esfuerzo normal se llama presión, y no existen esfuerzos
cortantes. Las fuerzas que actúan sobre un elemento de un fluido en reposo son las
que se deben a los esfuerzos normales, además de la gravedad. Tomaremos un
elemento de la forma de la figura 2.2.
Figura 2.2 Fuerzas que actúan sobre un elemento de volumen
El peso de este elemento es
𝑊 = 𝑚𝑔 = 𝜌𝑉𝑔 = 𝜌𝑔 (∆𝑥 ∆𝑦 ∆𝑧
2).
La fuerza 𝐹 = (𝐹𝑥, 𝐹𝑦 , 𝐹𝑧) donde 𝐹𝑥, 𝐹𝑦 , 𝐹𝑧 son funciones definidas en Ω ⊂ ℝ3. Por
simplicidad 𝐹𝑥 = 𝐹𝑥(𝑥, 𝑦, 𝑧) (𝑥, 𝑦, 𝑧) ∈ Ω ⊂ ℝ3.
Para todo cuerpo en reposo se tiene
Σ𝐹𝑥 = 0,
luego,
Δ𝐹𝑥 − Δ𝐹𝑠𝑥 = 0,
Δ𝐹𝑥 − Δ𝐹𝑠𝑠𝑒𝑛𝜃 = 0,
Δ𝐹𝑥 − Δ𝐹𝑠Δy
Δs = 0.

43
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Nos interesa calcular la presión en un punto, lo cual implica tener el mínimo
volumen posible, para conseguir esto tomaremos el límite cuando el volumen del
elemento tiende a cero, previamente dividiremos la ecuación anterior para 𝛥𝑦 𝛥𝑧,
tenemos:
Δ𝐹𝑥Δy Δz
− Δ𝐹𝑠Δy
Δy ΔzΔs = 0,
lim∆𝑉→0
[Δ𝐹𝑥
Δy Δz−
Δ𝐹𝑠 ΔzΔs
] = 0,
lim∆𝑉→0
Δ𝐹𝑥Δy Δz
− lim∆𝑉→0
Δ𝐹𝑠 ΔzΔs
= 0,
𝜎𝑥𝑥 − 𝜎𝑠𝑠 = 0,
por último resulta
𝜎𝑥𝑥 = 𝜎𝑠𝑠.
De la misma forma tenemos:
Σ𝐹𝑦 = 0,
Δ𝐹𝑦 − Δ𝐹𝑠𝑦 − 𝜌𝑔 (∆𝑥 ∆𝑦 ∆𝑧
2) = 0,
Δ𝐹𝑦 − Δ𝐹𝑠𝑐𝑜𝑠𝜃 − 𝜌𝑔 (∆𝑥 ∆𝑦 ∆𝑧
2) = 0,
Δ𝐹𝑦 − Δ𝐹𝑠𝛥𝑥
𝛥𝑠− 𝜌𝑔 (
∆𝑥 ∆𝑦 ∆𝑧
2) = 0,
dividiendo por 𝛥𝑥 𝛥𝑧 resulta
𝛥𝐹𝑦
𝛥𝑥 𝛥𝑧− Δ𝐹𝑠
𝛥𝑥
𝛥𝑠 𝛥𝑥 𝛥𝑧−
𝜌𝑔
Δx Δz(∆𝑥 ∆𝑦 ∆𝑧
2) = 0,
𝛥𝐹𝑦
𝛥𝑥 𝛥𝑧−𝛥𝐹𝑠𝛥𝑠 𝛥𝑧
− 𝜌𝑔∆𝑦
2 = 0,
tomamos el límite cuando el volumen del elemento tiende a cero:

44
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
lim∆𝑉→0
𝛥𝐹𝑦
𝛥𝑥 𝛥𝑧− lim∆𝑉→0
Δ𝐹𝑠 𝛥𝑠𝛥𝑧
− lim∆𝑉→0
𝜌𝑔∆𝑦
2= 0,
𝜎𝑦𝑦 − 𝜎𝑠𝑠 − 𝜌𝑔(0)
2= 0,
𝜎𝑦𝑦 = 𝜎𝑠𝑠.
Se observa que el esfuerzo normal en un punto no depende de la dirección, pues el
ángulo 𝜃 no forma parte de estos resultados 𝜎𝑦𝑦 = 𝜎𝑠𝑠 = 𝜎𝑥𝑥 . Concluiremos que
el esfuerzo normal en un punto es una cantidad escalar, esta cantidad escalar es la
presión la misma que es una función definida en Ω ⊂ ℝ3 .
La deducción anterior se encuentra en ([8] págs. 25-26).
2.3.- Variación de la presión con la altura en un fluido compresible e
incompresible.
2.3.1.- Variación de la presión con la elevación para un fluido estático
incompresible
Consideremos un cuerpo sumergido en un fluido estático (figura 2.3), las fuerzas
que actúan sobre éste se deben a la presión del medio circundante: -(∇𝑝)∆𝑉 y, a la
fuerza de gravedad: 𝛾∆𝑉, donde 𝛾 es el peso específico. En la dirección y del
elemento de volumen considerado actúan la presión p en la cara inferior y, 𝑝 +
𝜕𝑝
𝜕𝑦∆𝑦 en la cara superior, de esta manera, la fuerza resultante sería 𝑑𝐹𝑦 =
∆𝑝(∆𝑥∆𝑧) = −𝜕𝑝
𝜕𝑦𝑑𝑦(𝑑𝑥𝑑𝑧), de la misma forma calculamos las componentes de
la fuerza 𝑑𝐹𝑥 y 𝑑𝐹𝑧 , luego la fuerza resultante tiene la forma:
𝑑𝐹 = 𝑑𝐹𝑥𝑖 + 𝑑𝐹𝑦𝑗 + 𝑑𝐹𝑧�⃗⃗� = − (𝜕𝑝
𝜕𝑥𝑖 +𝜕𝑝
𝜕𝑦𝑗 +𝜕𝑝
𝜕𝑧�⃗⃗�) 𝑑𝑦𝑑𝑥𝑑𝑧,
así, por la definición del gradiente tenemos:
𝑑𝐹 = (−∇𝑝)𝑑𝑦𝑑𝑥𝑑𝑧 = −(∇𝑝)∆𝑉. (2.3)
El gradiente es el vector que indica la máxima rapidez de cambio de la variable
dependiente con respecto a la distancia, entonces en la dirección del eje y, la
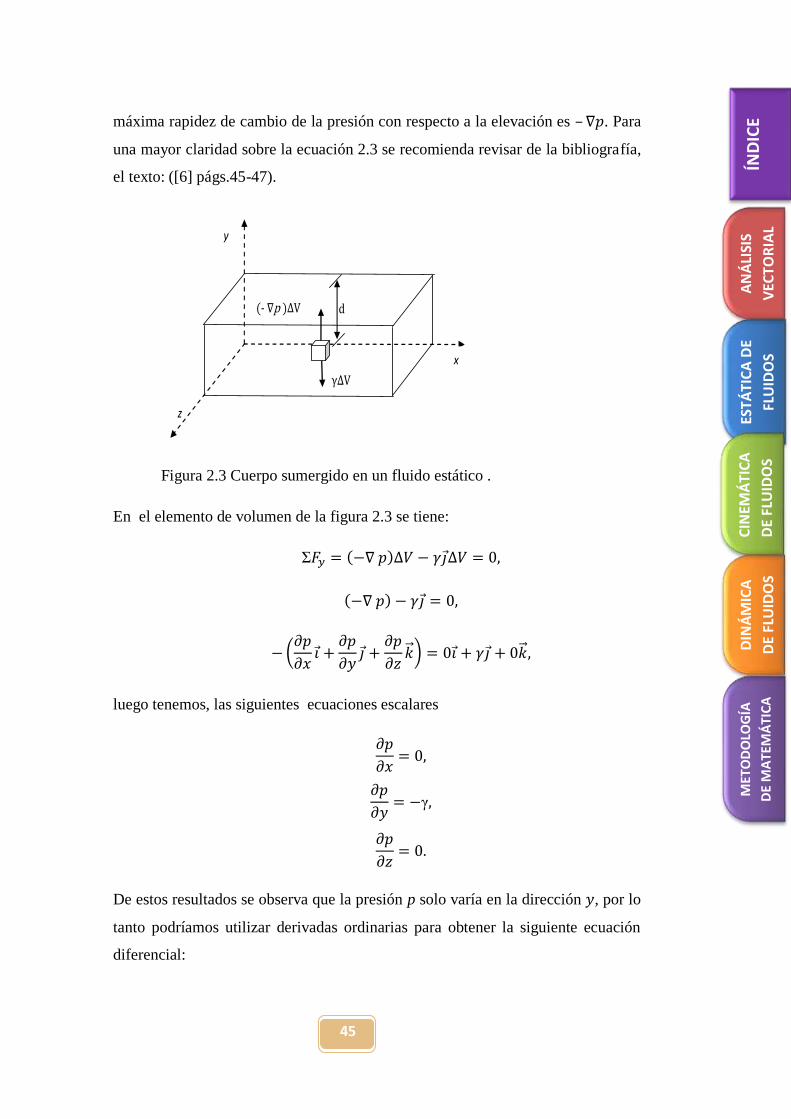
45
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E máxima rapidez de cambio de la presión con respecto a la elevación es – ∇𝑝. Para
una mayor claridad sobre la ecuación 2.3 se recomienda revisar de la bibliografía,
el texto: ([6] págs.45-47).
Figura 2.3 Cuerpo sumergido en un fluido estático .
En el elemento de volumen de la figura 2.3 se tiene:
Σ𝐹𝑦 = (−∇ 𝑝)∆𝑉 − 𝛾𝑗∆𝑉 = 0,
(−∇ 𝑝) − 𝛾𝑗 = 0,
−(𝜕𝑝
𝜕𝑥𝑖 +𝜕𝑝
𝜕𝑦𝑗 +𝜕𝑝
𝜕𝑧�⃗⃗�) = 0𝑖 + 𝛾𝑗 + 0�⃗⃗�,
luego tenemos, las siguientes ecuaciones escalares
𝜕𝑝
𝜕𝑥= 0,
𝜕𝑝
𝜕𝑦= −γ,
𝜕𝑝
𝜕𝑧= 0.
De estos resultados se observa que la presión p solo varía en la dirección 𝑦, por lo
tanto podríamos utilizar derivadas ordinarias para obtener la siguiente ecuación
diferencial:
d
z
γ∆V
(- ∇p )∆V
y
x

46
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝑑𝑝
𝑑𝑦= −γ,
(2.4)
estableciendo límites de integración tendremos:
∫ 𝑑𝑝 = ∫ −𝛾𝑑𝑦,𝑦0
𝑦
𝑝𝑎𝑡𝑚
𝑝
donde:
patm es la presión atmosférica en la superficie libre en una posición y0
p es la presión buscada en cualquier posición y.
La gravedad es constante y el líquido es incompresible, por lo tanto podemos tomar
el peso específico 𝛾 como constante, luego integrando tenemos:
𝑝𝑎𝑡𝑚 − 𝑝 = −𝛾(𝑦0 − 𝑦), (2.5)
reemplazando 𝑦0 − 𝑦 = 𝑑 y 𝑝 − 𝑝𝑎𝑡𝑚 = 𝑝𝑚𝑎𝑛 en la ecuación 2.5 se obtiene la
siguiente ecuación
𝑝𝑚𝑎𝑛 = 𝛾𝑑. (2.6)
Las ecuaciones resultantes se las encuentra en el siguiente texto: ([6] págs.53-55).
2.3.2.- Variación de la presión con la elevación para un fluido estático
compresible.
Un fluido sería compresible si consideramos el peso específico como variable en
la ecuación diferencial:
𝑑𝑝
𝑑𝑦= −γ.
En los resultados previos se lo consideró constante, ya que se analizó para
distancias pequeñas, pero ahora se estudiará la presión afectada por distancias
grandes como por ejemplo la atmósfera, en la cual se presentan dos casos, el
primero cuando la temperatura del fluido permanece constante y cuando la
temperatura del fluido varía linealmente con la elevación.
47
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 2.3.2.1.- Gas a temperatura constante
En un gas a temperatura T constante, se cumple la ecuación de estado de la
siguiente forma:
𝑝𝑉 = 𝑅𝑇 = 𝐶 = 𝑝0𝑉0, (2.7)
donde V es el volumen específico que es el inverso de la densidad, R es la constante
del gas que depende sólo del peso molecular del fluido. Por lo tanto la ecuación
anterior se transforma así:
𝑝𝑉 = 𝑝1
𝜌= 𝑝
1𝛾𝑔
= 𝑝𝑔
𝛾= 𝐶,
𝑝0𝑉0 = 𝑝01
𝜌0= 𝑝0
1𝛾0𝑔0
= 𝑝0𝑔0𝛾0= 𝐶,
luego,
𝑝𝑔
𝛾= 𝐶 = 𝑝0
𝑔0𝛾0,
si suponemos que la elevación no es muy grande consideraremos a 𝑔 y 𝑔0 del
mismo valor entonces obtenemos las ecuaciones siguientes:
𝑝
𝛾= 𝐶1 =
𝑝0𝛾0,
resolviendo 𝛾 y 𝛾0 en la ecuación anterior tenemos,
𝛾 =𝑝
𝐶1 , 𝛾0 =
𝑝0𝐶1.
Conocemos la ecuación diferencial de la presión con relación a la altura (ecuación
2.4), en la cual reemplazamos 𝛾 de la siguiente forma:
𝑑𝑝
𝑑𝑦= −γ = −
𝑝
𝐶1,
𝑑𝑝
𝑝= −
𝑑𝑦
𝐶1,
para resolver esta ecuación diferencial, tomamos como límites de integración las
presiones 𝑝0, 𝑝 y las posiciones 𝑦0, 𝑦 , se obtiene
∫𝑑𝑝
𝑝= −∫
𝑑𝑦
𝐶1
𝑦
𝑦0
,𝑝
𝑝0

48
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E integrando resulta,
ln 𝑝 |𝑝0𝑝= −
𝑦
𝐶1|𝑦0𝑦,
ln 𝑝 − ln 𝑝0 = −1
𝐶1(𝑦 − 𝑦0),
aplicando las propiedades de los logaritmos y reemplazando 𝐶1 =𝑝0
𝛾0:
ln𝑝
𝑝0=−
𝛾0𝑝0(𝑦 − 𝑦0),
por último resolvemos la ecuación anterior para p y se obtiene
𝑝 = 𝑝0𝑒[−𝛾0𝑝0(𝑦−𝑦0)].
(2.8)
Este último resultado indica la presión en función de una presión conocida 𝑝0 para
un fluido con un peso específico 𝛾0 y una elevación 𝑦0.
2.3.2.2.- Gas a temperatura variable
Recordando la ecuación diferencial 𝑑𝑝
𝑑𝑦= −γ que nos dice que la presión varía solo
en la dirección 𝑦 , además la ecuación de estado, que relaciona la presión, el
volumen y la temperatura absoluta 𝑝𝑉 = 𝑅𝑇; tomaremos en cuenta la variación
de la temperatura T con la elevación y de la siguiente forma:
𝑇 = 𝑇0 + 𝐾𝑦.
Asumimos que T es una función definida en Ω ⊂ ℝ3
En la ecuación anterior calculamos el diferencial 𝑑𝑦
𝑑𝑇 = 𝑑𝑇0 + 𝑑𝐾𝑦,
luego obtenemos:
𝑑𝑦 =𝑑𝑇
𝐾,

49
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E reemplazamos en 𝑑𝑝
𝑑𝑦= −γ obteniendo:
𝑑𝑝
𝑑𝑇𝐾
= −γ,
pero 𝑝𝑉 = 𝑝𝑉 = 𝑝1
𝜌= 𝑝
1𝛾
𝑔
= 𝑝𝑔
𝛾= 𝑅𝑇 de donde 𝛾 =
𝑝𝑔
𝑅𝑇 , ecuación que la
podemos reemplazar en el resultado anterior así,
𝑑𝑝
𝑑𝑇𝐾
= −γ = −𝑝𝑔
𝑅𝑇.
Se nota que resultado es una ecuación diferencial de variables separables, además
los valores K, R y 𝑔 son constantes lo cual escribiremos
𝑑𝑝
𝑝= −
𝑔
𝐾𝑅 𝑑𝑇
𝑇.
Plantearemos la solución integral de la ecuación precedente tomando en cuenta los
límites de integración de 𝑝0 a 𝑝 y de 𝑇0 a 𝑇 , donde 𝑝0 y 𝑇0 son valores conocidos
en la elevación 𝑦 = 0. Así tenemos:
∫𝑑𝑝
𝑝
𝑝
𝑝0
= −𝑔
𝐾𝑅∫
𝑑𝑇
𝑇,
𝑇
𝑇0
resulta ln (𝑝) − 𝑙𝑛(𝑝0) = −𝑔
𝐾𝑅(ln (𝑇) − ln (𝑇0)),
tomando en cuenta las propiedades de los logaritmos se obtiene la siguiente
ecuación
𝑙𝑛𝑝
𝑝0= ln (
T0T)
gKR,
resolvemos la ecuación anterior para 𝑝 y obtenemos:
𝑝 = 𝑝0 (T0T)
gKR,
luego, reemplazando 𝑇 = 𝑇0 + 𝐾𝑦 se tiene
𝑝 = 𝑝0 (T0
T0 + Ky)
gKR.
(2.9)
La última ecuación determina la presión, conociendo los valores iníciales 𝑝0 y 𝑇0
en una elevación y.

50
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El desarrollo de las ecuaciones anteriores se lo ha tomado de ([6] págs.56-59).
2.4.- Teorema de Arquímedes y cuerpos flotantes.
Un cuerpo sumergido en el agua parece pesar menos que en el aire, si el cuerpo es
menos denso que el agua, flota.
Figura 2.4 Fuerzas que actúan sobre un elemento de volumen.
Según el principio de Arquímedes: “Si un cuerpo está parcial o totalmente
sumergido en un fluido, este ejerce una fuerza hacia arriba sobre el cuerpo
igual al peso del fluido desplazado por el cuerpo.” A ésta fuerza hacia arriba la
llamaremos fuerza de flotación y para demostrar el principio de Arquímedes
deberemos analizar antes, las fuerzas en general, sobre las superficies sumergidas,
las cuales se deben a la presión y a su variación de un punto a otro.
Para determinar la fuerza de flotación analizaremos la parte pertinente del siguiente
texto citado en la bibliografía: ([8]págs.44,45)
Determinaremos la fuerza neta de flotación considerando una columna infinitesimal
en el cuerpo con áreas de sección transversal 𝑑𝐴𝑦 (figura 2.4)
𝑑𝐹 = 𝐹𝑢𝑒𝑟𝑧𝑎 𝑑𝑒𝑏𝑖𝑑𝑎 𝑎 𝑙𝑎 𝑝𝑟𝑒𝑠𝑖ó𝑛 − 𝑝𝑒𝑠𝑜,
𝑑𝐹 = 𝑝1𝑑𝐴𝑗 − 𝑝2𝑑𝐴𝑗 − 𝑚�⃗�,
= (𝑝1 − 𝑝2)𝑑𝐴𝑗 − 𝜌𝑐𝑉�⃗�.

51
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Sabemos que la diferencia de presiones 𝑝1 − 𝑝2 = 𝜌𝑔ℎ (Ecuación 2.6), además el
volumen V del cuerpo se puede expresar como ℎ𝑑𝐴𝑦, se obtiene.
𝑑𝐹 = ( 𝜌𝑔ℎ)𝑑𝐴𝑗 − 𝜌𝑐(ℎ𝑑𝐴)𝑔𝑗,
= (𝜌 − 𝜌𝑐)𝑔ℎ𝑑𝐴𝑗,
luego,
∫𝑑𝐹 = ∫(𝜌 − 𝜌𝑐)𝑔ℎ𝑑𝐴𝑗 = (𝜌 − 𝜌𝑐)𝑔ℎ∫𝑑𝐴𝑗,
consecuentemente,
𝐹 = (𝜌 − 𝜌𝑐)𝑔𝑉𝑗. 2.10
Esta es la fuerza hacia arriba igual al peso del fluido desplazado (principio de
Arquímedes).
Con este resultado se observa que la fuerza resultante 𝐹 = 𝜌𝑔𝑉𝑗 − 𝜌𝑐𝑔𝑉𝑗 está
formada por la fuerza de flotación 𝜌𝑔𝑉𝑗 y el peso del cuerpo −𝜌𝑐𝑔𝑉𝑗, además,
si la densidad del líquido es mayor que la densidad del cuerpo, esto es 𝜌 > 𝜌𝑐, éste
flotará en la superficie, entonces,
𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 𝑓𝑙𝑜𝑡𝑎𝑐𝑖ó𝑛 = 𝜌𝑔𝑉𝑠𝑗, 2.11
donde 𝑉𝑠 es el volumen sumergido.
2.5.- Algunas aplicaciones prácticas.
2.5.1.- Batiscafo
Un batiscafo es un pequeño vehículo de inmersión profunda sumergible,
especialmente diseñado para llegar a grandes profundidades bajo el océano,
soportando la enorme presión del agua. Son pequeños submarinos tripulados con
propulsión autónoma que permiten alcanzar grandes profundidades en el mar con
fines militares o científicos.
El batiscafo Trieste fue desarrollado por el físico suizo Piccard y fue construido en
Italia en 1959 ; estaba basado en el principio de que hay unos elementos más ligeros
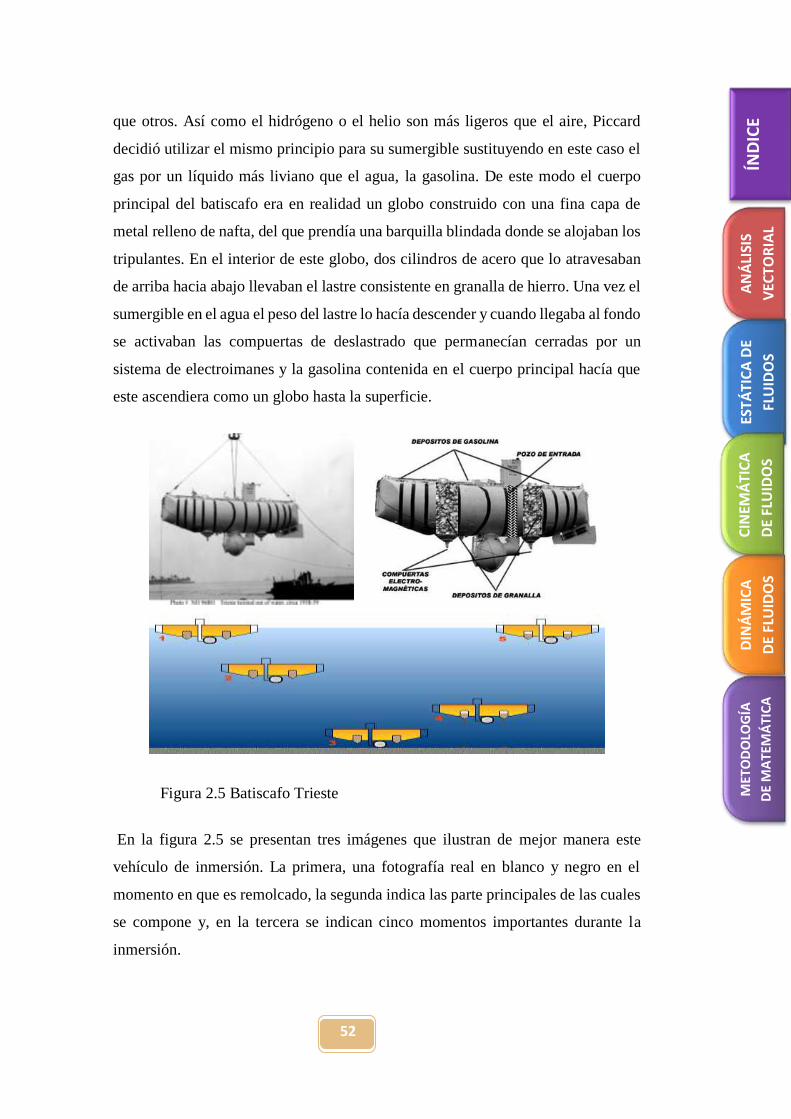
52
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E que otros. Así como el hidrógeno o el helio son más ligeros que el aire, Piccard
decidió utilizar el mismo principio para su sumergible sustituyendo en este caso el
gas por un líquido más liviano que el agua, la gasolina. De este modo el cuerpo
principal del batiscafo era en realidad un globo construido con una fina capa de
metal relleno de nafta, del que prendía una barquilla blindada donde se alojaban los
tripulantes. En el interior de este globo, dos cilindros de acero que lo atravesaban
de arriba hacia abajo llevaban el lastre consistente en granalla de hierro. Una vez el
sumergible en el agua el peso del lastre lo hacía descender y cuando llegaba al fondo
se activaban las compuertas de deslastrado que permanecían cerradas por un
sistema de electroimanes y la gasolina contenida en el cuerpo principal hacía que
este ascendiera como un globo hasta la superficie.
Figura 2.5 Batiscafo Trieste
En la figura 2.5 se presentan tres imágenes que ilustran de mejor manera este
vehículo de inmersión. La primera, una fotografía real en blanco y negro en el
momento en que es remolcado, la segunda indica las parte principales de las cuales
se compone y, en la tercera se indican cinco momentos importantes durante la
inmersión.

53
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 2.5.2.- Manómetros
La manometría es una técnica utilizada en la medición de presiones, el medidor de
presión más sencillo es el manómetro de tubo abierto, el tubo en u contiene un
líquido de densidad ρ, con frecuencia mercurio o agua.
Figura 2.6 Manómetro de tubo abierto
En la figura 2.6 se desea medir la presión en el punto C, el fluido del tanque llega
al manómetro en el punto A, la misma altura del punto A’, sabemos por resultados
anteriores que la máxima rapidez de cambio de la presión ocurre en la dirección
del vector gravitación es decir,
𝑑𝑝
𝑑𝑦= −𝜌𝑔 = −γ,
integrando esta ecuación entre los puntos B y A’ se obtiene:
∫ 𝑑𝑝 = ∫ −𝜌𝑔𝑑𝑦𝐵
𝐴′
𝑝𝑎𝑡𝑚
𝑝𝐴′
,
es decir,
𝑝𝑎𝑡𝑚 − 𝑝𝐴′ = −𝜌2 𝑔(𝐵 − 𝐴
′) = −𝜌2 𝑔𝑑2,
donde ρ2 es la densidad del fluido que se encuentra en el tubo.

54
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E De la misma forma integramos la ecuación 𝑑𝑝
𝑑𝑦= 𝜌𝑔 = −γ, ahora entre los puntos
A y C, tenemos:
∫ 𝑑𝑝 = ∫ −𝜌𝑔𝑑𝑦,𝐶
𝐴
𝑝𝐶
𝑝𝐴
se obtiene:
𝑝𝐶 − 𝑝𝐴 = −𝜌1 𝑔(𝐶 − 𝐴) = −𝜌1 𝑔𝑑1,
donde ρ1 es la densidad del fluido que se encuentra en el recipiente. Luego, la
presión en un fluido en reposo es la misma en todos los puntos que tengan la misma
elevación, estos son los puntos A y A’ por lo tanto 𝑝𝐴 = 𝑝𝐴′.
El resultado final de combinar las ecuaciones anteriores será:
𝑝𝐶 − 𝑝𝑎𝑡𝑚 = 𝜌2𝑔𝑑2 − 𝜌1𝑔𝑑1.
De esta forma se obtiene la presión manométrica que es la diferencia entre la presión
absoluta y la presión atmosférica. Por ejemplo si la presión dentro de un neumático
es igual a la presión atmosférica, el neumático está desinflado, la presión dentro del
neumático debe ser mayor para sostener el vehículo, ésta es la presión absoluta,
mientras que el exceso de presión por encima de la atmósfera se llama presión
manométrica.
2.5.3.- Hidrómetro

55
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Figura 2.7 (a) Hidrómetro sencillo (b) Hidrómetro que mide la densidad
del ácido de una batería.( [9] página 433).
Es un aparato útil para medir la densidad de los líquidos, un hidrómetro sencillo
(figura 2.7a) consiste en un flotador calibrado que se unde hasta que el peso del
fluido que desplaza es igual a su propio peso, de esta manera se undirá menos en
líquidos más densos.
El hidrómetro de la figura 2.7b sirve para medir la densidad del líquido de la batería
o anticongelante de un automóvil, se introduce el líquido en el tubo que contiene el
hidrómetro, expulsando aire al apretar la perilla de la parte superior, la densidad se
la lee directamente mediante la escala del hidrómetro, la cual da una lectura de 1,0
en agua pura.
2.5.4. Maquinas multiplicadoras de fuerzas
La hidráulica es la rama de la física que estudia el comportamiento de los líquidos
en reposo o en movimiento. La hidrodinámica estudia los líquidos en movimiento.
Los ingenieros civiles utilizan este tipo de sistemas hidráulicos en las plantas de
energía hidroeléctrica al manipular el flujo de un líquido para impulsar las turbinas.
Estas plantas de energía abastecen de electricidad a más de mil millones de personas
en el mundo.
En el siglo diecisiete el francés Blas Pascal hizo un descubrimiento sin precedentes.
Al multiplicar la profundidad de un fluido por su peso inherente. Pascal creó la
fórmula para determinar la presión de un fluido, esto conllevo al aspecto más
importante de la hidrostática, la multiplicación de la fuerza. El principio de Pascal
constituye la base de todo lo que hacemos con la hidráulica.
De la ecuación 2.4 𝑑𝑝
𝑑𝑦= −𝛾, la cual indica que si y aumenta, p disminuye; es decir,
la presión disminuye cuando se sube en el fluido. Si 𝑝1 y 𝑝2 son las presiones en las
alturas 𝑦1, 𝑦2, y el peso específico es constante entonces:
𝑝2 − 𝑝1 = −𝛾(𝑦2 − 𝑦1),
es la ecuación de la presión en un fluido de densidad constante.
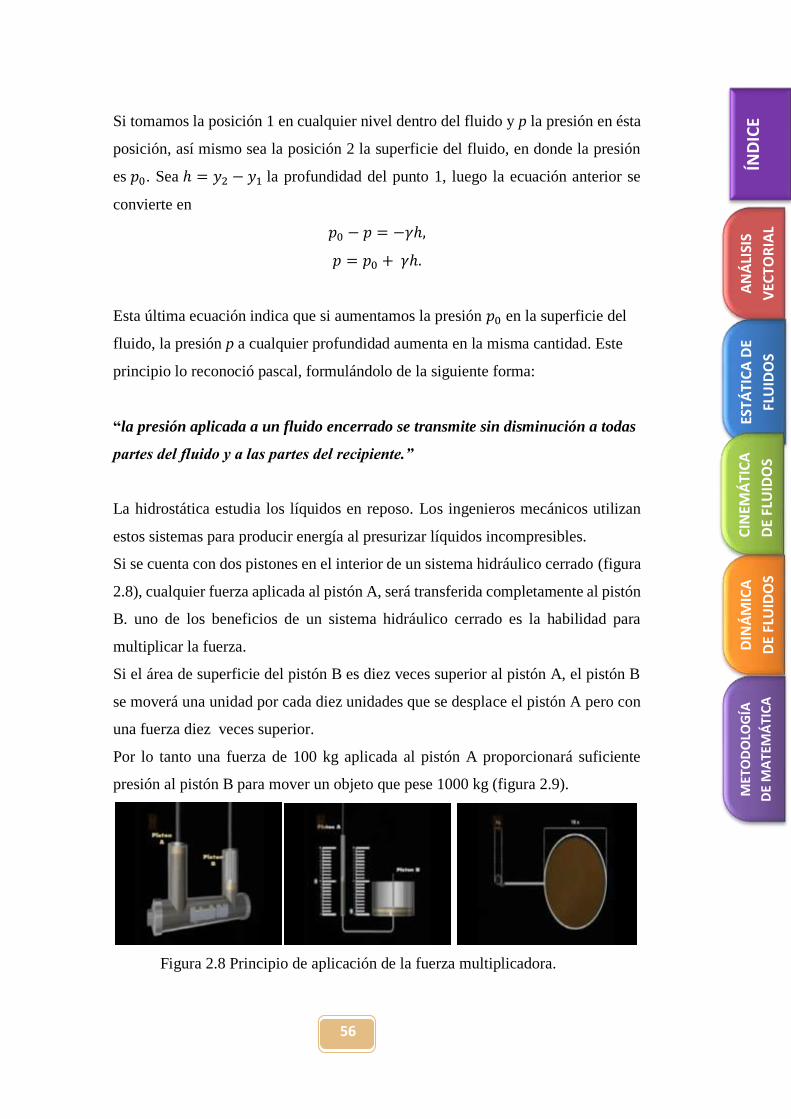
56
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Si tomamos la posición 1 en cualquier nivel dentro del fluido y p la presión en ésta
posición, así mismo sea la posición 2 la superficie del fluido, en donde la presión
es 𝑝0. Sea ℎ = 𝑦2 − 𝑦1 la profundidad del punto 1, luego la ecuación anterior se
convierte en
𝑝0 − 𝑝 = −𝛾ℎ,
𝑝 = 𝑝0 + 𝛾ℎ.
Esta última ecuación indica que si aumentamos la presión 𝑝0 en la superficie del
fluido, la presión p a cualquier profundidad aumenta en la misma cantidad. Este
principio lo reconoció pascal, formulándolo de la siguiente forma:
“la presión aplicada a un fluido encerrado se transmite sin disminución a todas
partes del fluido y a las partes del recipiente.”
La hidrostática estudia los líquidos en reposo. Los ingenieros mecánicos utilizan
estos sistemas para producir energía al presurizar líquidos incompresibles.
Si se cuenta con dos pistones en el interior de un sistema hidráulico cerrado (figura
2.8), cualquier fuerza aplicada al pistón A, será transferida completamente al pistón
B. uno de los beneficios de un sistema hidráulico cerrado es la habilidad para
multiplicar la fuerza.
Si el área de superficie del pistón B es diez veces superior al pistón A, el pistón B
se moverá una unidad por cada diez unidades que se desplace el pistón A pero con
una fuerza diez veces superior.
Por lo tanto una fuerza de 100 kg aplicada al pistón A proporcionará suficiente
presión al pistón B para mover un objeto que pese 1000 kg (figura 2.9).
Figura 2.8 Principio de aplicación de la fuerza multiplicadora.
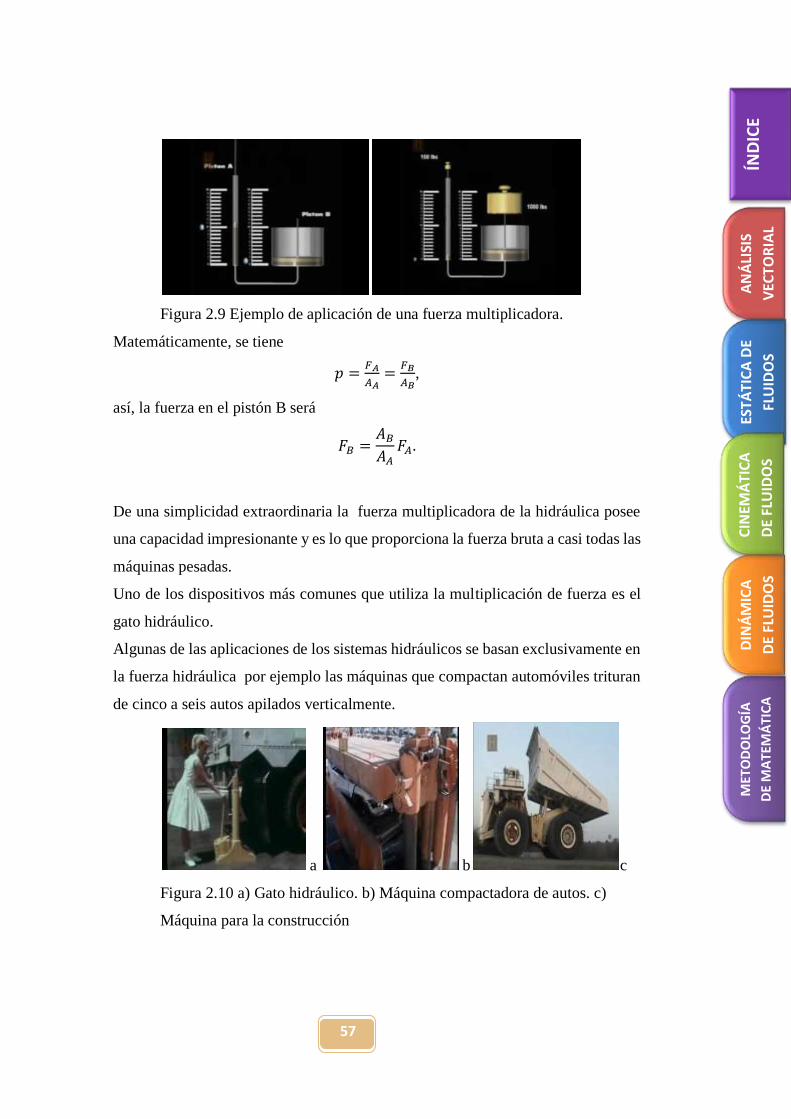
57
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 2.9 Ejemplo de aplicación de una fuerza multiplicadora.
Matemáticamente, se tiene
𝑝 =𝐹𝐴
𝐴𝐴=𝐹𝐵
𝐴𝐵,
así, la fuerza en el pistón B será
𝐹𝐵 =𝐴𝐵𝐴𝐴𝐹𝐴.
De una simplicidad extraordinaria la fuerza multiplicadora de la hidráulica posee
una capacidad impresionante y es lo que proporciona la fuerza bruta a casi todas las
máquinas pesadas.
Uno de los dispositivos más comunes que utiliza la multiplicación de fuerza es el
gato hidráulico.
Algunas de las aplicaciones de los sistemas hidráulicos se basan exclusivamente en
la fuerza hidráulica por ejemplo las máquinas que compactan automóviles trituran
de cinco a seis autos apilados verticalmente.
a b c
Figura 2.10 a) Gato hidráulico. b) Máquina compactadora de autos. c)
Máquina para la construcción
58
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El impacto de la hidráulica en la industria de la construcción, literalmente cambio
la faz de la tierra, el mejor ejemplo de la fuerza bruta que proporciona la hidráulica
puede encontrarse en la industria de la construcción. A lo largo de los años, las
excavadoras, grúas y camiones que han construido nuestro mundo, han crecido
exponencialmente en tamaño alcanzando una eficiencia y poder sin igual
El desarrollo de la industria automotriz se bebe en gran parte a los sistemas
hidráulicos en los frenos, la dirección y la suspensión.

59
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CAPÍTULO 3
CINEMÁTICA DE FLUIDOS NO VISCOSOS.
Resumen
En éste capítulo se consideran las formas de descripción cinemática de un fluido; la
descripción lagrangiana y euleriana. Se deduce el teorema de transporte de
Reynolds, el cual permite cambiar de un enfoque de sistema a un enfoque de
volumen de control. Luego se trata el principio de la conservación de la masa y la
ecuación de continuidad. Se considera también los modelos matemáticos de
diferentes tipos de flujos como son: flujos estacionarios, incompresibles,
irrotacionales 2d y 3d de un fluido no viscoso, flujo de un fluido alrededor de una
esfera y de un obstáculo cilíndrico. Por último se habla de la importancia de los
modelos matemáticos.
En cada tema tratado se indica la bibliografía utilizada y los textos recomendados
para aclarar y profundizar el presente trabajo.
3.1.- Descripción cinemática de un fluido.
La cinemática de fluidos, explica como fluyen los fluidos y cómo describir su
movimiento. Existen dos maneras de describir un fluido en movimiento, la
descripción lagrangiana y la descripción euleriana, la diferencia entre ambos
enfoques está en la forma de identificar la posición en el campo, lo cual se refiere
a una cantidad física definida como función.
En el movimiento de fluidos existen patrones de flujo que se pueden visualizar,
entre ellos se tiene una línea de corriente que es una curva que, en toda su
trayectoria, es tangente a la velocidad local instantánea.
La trayectoria real recorrida por una partícula de fluido se llama línea de
trayectoria; un tubo de corriente es un conducto hecho de todas las líneas de
corriente que pasan por una curva cerrada pequeña.

60
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 3.1 Línea de corriente para un flujo en dos dimensiones.
Obtenemos una ecuación para una línea de corriente, considerando una longitud de
arco infinitesimal 𝑑𝑟 a lo largo de una línea de corriente (figura 3.1), por la
definición de línea de corriente, 𝑑𝑟 es paralelo al vector velocidad instantánea, así
por semejanza de triángulos obtenemos la siguiente relación:
𝑑𝑟
𝑣=𝑑𝑥
𝑣𝑥=𝑑𝑦
𝑣𝑦,
(3.1)
de la cual se puede obtener la ecuación diferencial para una línea de corriente en el
plano:
(𝑑𝑦
𝑑𝑥) =
𝑣𝑦
𝑣𝑥.
(3.2)
De la solución de la ecuación 3.2 se obtiene la familia de curvas que representa las
líneas de corriente del campo de flujo. Se propone un ejemplo en la página 117.
La deducción precedente, así como las ecuaciones de una línea de corriente se las
ha resumido de: ([7] págs.129-130)
3.1.1.- Descripción lagrangiana
Se utiliza este procedimiento para estudiar cualquier partícula en el flujo indicando
su posición en algún instante, así, en el campo de velocidad �⃗⃗�(𝑥, 𝑦, 𝑧, 𝑡) 𝑥, 𝑦, 𝑧
deben variar continuamente, por ejemplo, consideremos el movimiento de las
𝑦
𝑥
𝑑𝑟
𝑑𝑥
𝑑𝑦
𝑣𝑥
𝑣𝑦
�⃗�
Línea de corriente
(𝑥, 𝑦)
(𝑥 + 𝑑𝑥, 𝑦 + 𝑑𝑦)
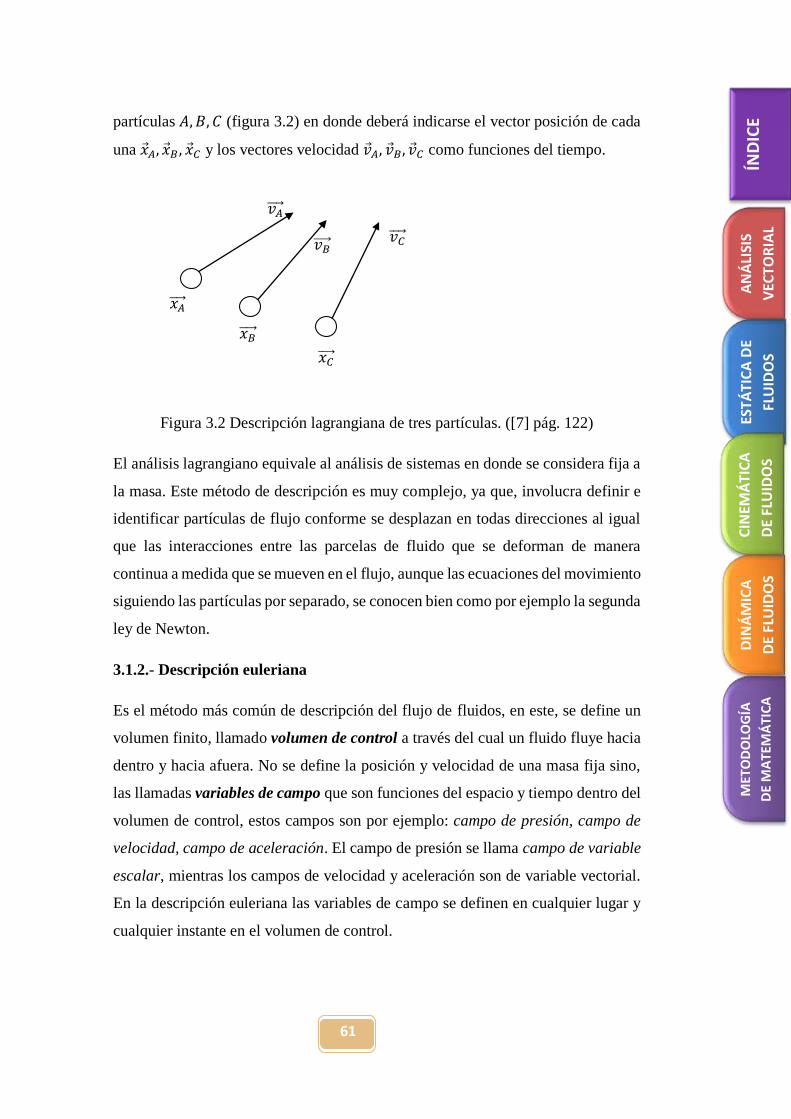
61
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E partículas 𝐴, 𝐵, 𝐶 (figura 3.2) en donde deberá indicarse el vector posición de cada
una �⃗�𝐴, �⃗�𝐵 , �⃗�𝐶 y los vectores velocidad �⃗�𝐴, �⃗�𝐵, �⃗�𝐶 como funciones del tiempo.
Figura 3.2 Descripción lagrangiana de tres partículas. ([7] pág. 122)
El análisis lagrangiano equivale al análisis de sistemas en donde se considera fija a
la masa. Este método de descripción es muy complejo, ya que, involucra definir e
identificar partículas de flujo conforme se desplazan en todas direcciones al igual
que las interacciones entre las parcelas de fluido que se deforman de manera
continua a medida que se mueven en el flujo, aunque las ecuaciones del movimiento
siguiendo las partículas por separado, se conocen bien como por ejemplo la segunda
ley de Newton.
3.1.2.- Descripción euleriana
Es el método más común de descripción del flujo de fluidos, en este, se define un
volumen finito, llamado volumen de control a través del cual un fluido fluye hacia
dentro y hacia afuera. No se define la posición y velocidad de una masa fija sino,
las llamadas variables de campo que son funciones del espacio y tiempo dentro del
volumen de control, estos campos son por ejemplo: campo de presión, campo de
velocidad, campo de aceleración. El campo de presión se llama campo de variable
escalar, mientras los campos de velocidad y aceleración son de variable vectorial.
En la descripción euleriana las variables de campo se definen en cualquier lugar y
cualquier instante en el volumen de control.
𝑣𝐵⃗⃗⃗⃗⃗
𝑣𝐴⃗⃗⃗⃗⃗
𝑥𝐴⃗⃗⃗⃗⃗
𝑥𝐵⃗⃗⃗⃗⃗
𝑥𝐶⃗⃗⃗⃗⃗
𝑣𝐶⃗⃗⃗⃗⃗

62
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 3.1.3.- Campo de aceleraciones
Describiremos el movimiento de una partícula de fluido mediante un enfoque
lagrangiano, para luego, mediante alguna manipulación matemática, expresarlo en
el enfoque euleriano. Por definición, la aceleración �⃑� de una partícula de fluido es
la derivada de la velocidad �⃗� con respecto al tiempo 𝑡, así:
�⃑� =𝑑�⃗�
𝑑𝑡.
Se asume ahora que la velocidad es una función definida en Ω ⊂ ℝ4 en ℝ3 donde
�⃗�(𝑥, 𝑦, 𝑧, 𝑡) es el vector velocidad de la partícula en el punto (𝑥, 𝑦, 𝑧) del espacio
en el tiempo t. Luego, la velocidad de la partícula en un tiempo t es la misma que
la del campo de velocidad �⃗⃗� en la posición (𝑥, 𝑦, 𝑧), además, sabemos que las
coordenadas 𝑥, 𝑦, 𝑧 son dependientes del tiempo t, por lo tanto en la ecuación
anterior utilizamos el valor del campo de velocidad y por la regla de la cadena
tenemos:
�⃑� =𝑑�⃗�
𝑑𝑡=𝑑�⃗⃗�(𝑥, 𝑦, 𝑧, 𝑡)
𝑑𝑡=𝜕�⃗⃗�
𝜕𝑥
𝑑𝑥
𝑑𝑡+𝜕�⃗⃗�
𝜕𝑦
𝑑𝑦
𝑑𝑡+𝜕�⃗⃗�
𝜕𝑧
𝑑𝑧
𝑑𝑡+𝜕�⃗⃗�
𝜕𝑡
𝑑𝑡
𝑑𝑡.
La derivada de la posición con respecto al tiempo representa la velocidad, entonces
las derivadas 𝑑𝑥
𝑑𝑡,𝑑𝑦
𝑑𝑡,𝑑𝑧
𝑑𝑡 son las componentes escalares de la velocidad en las
coordenadas 𝑥, 𝑦, 𝑧, a las cuales las notaremos como, 𝑉𝑥, 𝑉𝑦, 𝑉𝑧 , luego,
�⃑� =𝑑�⃗�
𝑑𝑡=𝑑�⃗⃗�(𝑥, 𝑦, 𝑧, 𝑡)
𝑑𝑡= (𝑉𝑥
𝜕�⃗⃗�
𝜕𝑥+ 𝑉𝑦
𝜕�⃗⃗�
𝜕𝑦+ 𝑉𝑧
𝜕�⃗⃗�
𝜕𝑧) +
𝜕�⃗⃗�
𝜕𝑡 .
Como �⃗⃗� es una variable de campo en función de 𝑥, 𝑦, 𝑧 y t, también la aceleración
está en función de estas coordenadas y del tiempo, por lo tanto, es una variable de
campo que expresada en forma vectorial se escribe de la siguiente manera:
�⃗�(𝑥, 𝑦, 𝑧, 𝑡) =𝑑�⃗⃗�
𝑑𝑡= (�⃗⃗� ∙ ∇)�⃗⃗� +
𝜕�⃗⃗�
𝜕𝑡 .
(3.3)
Al igual que la velocidad de una partícula y el campo de velocidad, se concluye que
la aceleración es una función definida en Ω ⊂ ℝ4 en ℝ3.

63
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El campo de aceleraciones descrito se lo encuentra en ([6] págs. 110-111; [7] pág.
124-126)
3.1.4.- Derivada material
Cuando se quiere seguir a una partícula de fluido que se mueve por un campo de
flujo, se utiliza la llamada derivada material.
𝐷
𝐷𝑡=𝑑
𝑑𝑡= (�⃗⃗� ∙ ∇) +
𝜕
𝜕𝑡 ,
(3.4)
que es un operador que se aplica a algunas propiedades escalares o vectoriales de
los fluidos, así, para cualquier campo vectorial �⃗⃗⃗� de Ω ⊂ ℝ4 en ℝ3, asociado con
un flujo se tiene:
𝐷�⃗⃗⃗�
𝐷𝑡=𝑑�⃗⃗⃗�
𝑑𝑡= (�⃗⃗� ∙ ∇)�⃗⃗⃗� +
𝜕�⃗⃗⃗�
𝜕𝑡.
(3.5)
Si reemplazamos �⃗⃗� (campo de velocidad) y P (campo de presión) por �⃗⃗⃗� en la
ecuación 3.5 resultan: la derivada material de la velocidad o aceleración material
𝐷�⃗⃗�
𝐷𝑡=𝑑�⃗⃗�
𝑑𝑡= (�⃗⃗� ∙ ∇)�⃗⃗� +
𝜕�⃗⃗�
𝜕𝑡= �⃗�(𝑥, 𝑦, 𝑧, 𝑡),
(3.6)
y la derivada material del campo escalar de la presión:
𝐷𝑃
𝐷𝑡=𝑑𝑃
𝑑𝑡= (�⃗⃗� ∙ ∇)𝑃 +
𝜕𝑃
𝜕𝑡.
(3.7)
Podemos verificar las ecuaciones anteriores en las páginas siguientes: ([6]
págs.111; [7] pág. 127,128)
3.1.5.- El teorema de transporte de Reynolds
El teorema de transporte de Reynolds (TTR) permite cambiar de un enfoque de
sistema a un enfoque de volumen de control. Consideremos un campo de flujo
arbitrario (figura 3.3) en el cual se observa un sistema de masa finita en los tiempos
𝑡 y 𝑡 + ∆𝑡, el volumen del espacio ocupado por el sistema en el tiempo 𝑡 es un
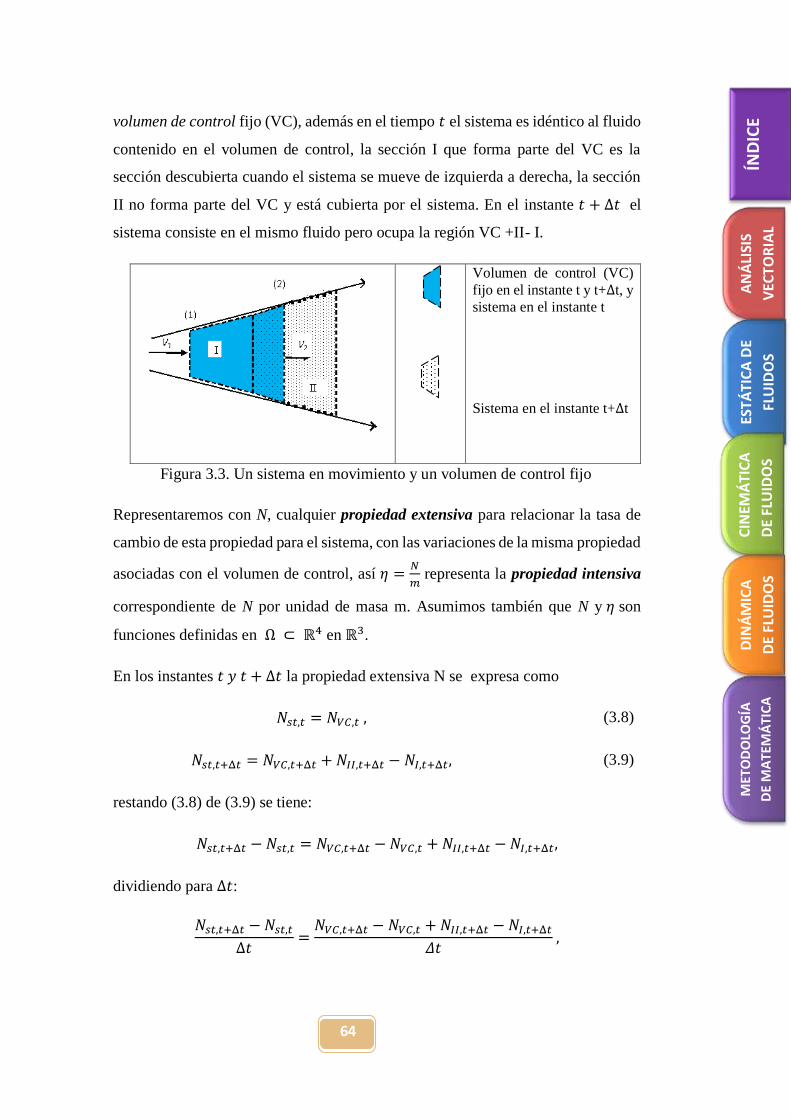
64
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E volumen de control fijo (VC), además en el tiempo 𝑡 el sistema es idéntico al fluido
contenido en el volumen de control, la sección I que forma parte del VC es la
sección descubierta cuando el sistema se mueve de izquierda a derecha, la sección
II no forma parte del VC y está cubierta por el sistema. En el instante 𝑡 + ∆𝑡 el
sistema consiste en el mismo fluido pero ocupa la región VC +II- I.
Volumen de control (VC)
fijo en el instante t y t+∆t, y
sistema en el instante t
Sistema en el instante t+∆t
Figura 3.3. Un sistema en movimiento y un volumen de control fijo
Representaremos con N, cualquier propiedad extensiva para relacionar la tasa de
cambio de esta propiedad para el sistema, con las variaciones de la misma propiedad
asociadas con el volumen de control, así 𝜂 =𝑁
𝑚 representa la propiedad intensiva
correspondiente de N por unidad de masa m. Asumimos también que N y 𝜂 son
funciones definidas en Ω ⊂ ℝ4 en ℝ3.
En los instantes 𝑡 𝑦 𝑡 + Δ𝑡 la propiedad extensiva N se expresa como
𝑁𝑠𝑡,𝑡 = 𝑁𝑉𝐶,𝑡 , (3.8)
𝑁𝑠𝑡,𝑡+Δ𝑡 = 𝑁𝑉𝐶,𝑡+Δ𝑡 +𝑁𝐼𝐼,𝑡+Δ𝑡 − 𝑁𝐼,𝑡+Δ𝑡, (3.9)
restando (3.8) de (3.9) se tiene:
𝑁𝑠𝑡,𝑡+Δ𝑡 − 𝑁𝑠𝑡,𝑡 = 𝑁𝑉𝐶,𝑡+Δ𝑡 −𝑁𝑉𝐶,𝑡 +𝑁𝐼𝐼,𝑡+Δ𝑡 −𝑁𝐼,𝑡+Δ𝑡,
dividiendo para Δ𝑡:
𝑁𝑠𝑡,𝑡+Δ𝑡 −𝑁𝑠𝑡,𝑡Δ𝑡
=𝑁𝑉𝐶,𝑡+Δ𝑡 − 𝑁𝑉𝐶,𝑡 +𝑁𝐼𝐼,𝑡+Δ𝑡 −𝑁𝐼,𝑡+Δ𝑡
𝛥𝑡 ,

65
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝑁𝑠𝑡,𝑡+Δ𝑡 −𝑁𝑠𝑡,𝑡Δ𝑡
=𝑁𝑉𝐶,𝑡+Δ𝑡 − 𝑁𝑉𝐶,𝑡
𝛥𝑡+𝑁𝐼𝐼,𝑡+Δ𝑡Δt
−𝑁𝐼,𝑡+Δ𝑡Δ𝑡
,
luego,
limΔ𝑡→0
𝑁𝑠𝑡,𝑡+Δ𝑡 −𝑁𝑠𝑡,𝑡Δ𝑡
= lim∆𝑡→0
𝑁𝑉𝐶,𝑡+Δ𝑡 −𝑁𝑉𝐶,𝑡𝛥𝑡
+ lim∆𝑡→0
𝑁𝐼𝐼,𝑡+Δ𝑡Δt
− lim∆𝑡→0
𝑁𝐼,𝑡+Δ𝑡Δ𝑡
.
Por la definición de derivada tenemos:
𝑑𝑁𝑠𝑡,𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶,𝑡𝑑𝑡
+ lim∆𝑡→0
𝑁𝐼𝐼,𝑡+Δ𝑡Δt
− lim∆𝑡→0
𝑁𝐼,𝑡+Δ𝑡Δ𝑡
,
reemplazando los valores de 𝑁 = 𝜂.𝑚 = 𝜂(𝜌. 𝑉) en las regiones I y II en el
instante 𝑡 + ∆𝑡:
𝑑𝑁𝑠𝑡,𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶,𝑡𝑑𝑡
+ lim∆𝑡→0
𝜂2𝜌2𝑉𝐼𝐼,𝑡+Δ𝑡Δt
− lim∆𝑡→0
𝜂1𝜌1𝑉𝐼,𝑡+Δ𝑡Δ𝑡
.
El volumen 𝑉 en las regiones I y II en el instante 𝑡 + Δ𝑡 se reemplaza con la
fórmula del volumen de fluido que atraviesa la sección A con velocidad v, así 𝑉 =
(𝑣. Δ𝑡)𝐴, reemplazando en la ecuación anterior resulta
𝑑𝑁𝑠𝑡,𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶,𝑡𝑑𝑡
+ lim∆𝑡→0
𝜂2𝜌2(𝑣2Δ𝑡𝐴2)
Δt− lim∆𝑡→0
𝜂1𝜌1(𝑣1Δ𝑡𝐴1)
Δ𝑡,
aplicando el límite se tiene
𝑑𝑁𝑠𝑡,𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶,𝑡𝑑𝑡
+ 𝜂2𝜌2𝑣2𝐴2 − 𝜂1𝜌1𝑣1𝐴1 .
Los términos 𝜂1𝜌1𝑣1𝐴1 y 𝜂2𝜌2𝑣2𝐴2 representan el flujo de entrada y de salida
respectivamente de la propiedad N en el volumen de control de la figura 3.3, por lo
tanto:
𝑑𝑁𝑠𝑡,𝑡𝑑𝑡
=𝑑𝑁𝑉𝐶,𝑡𝑑𝑡
+ 𝑁𝑠𝑎𝑙 −𝑁𝑒𝑛𝑡, (3.10)
indica que: “la razón de cambio con respecto al tiempo de la propiedad N del
sistema es igual a la razón de cambio con respecto al tiempo de N en el volumen
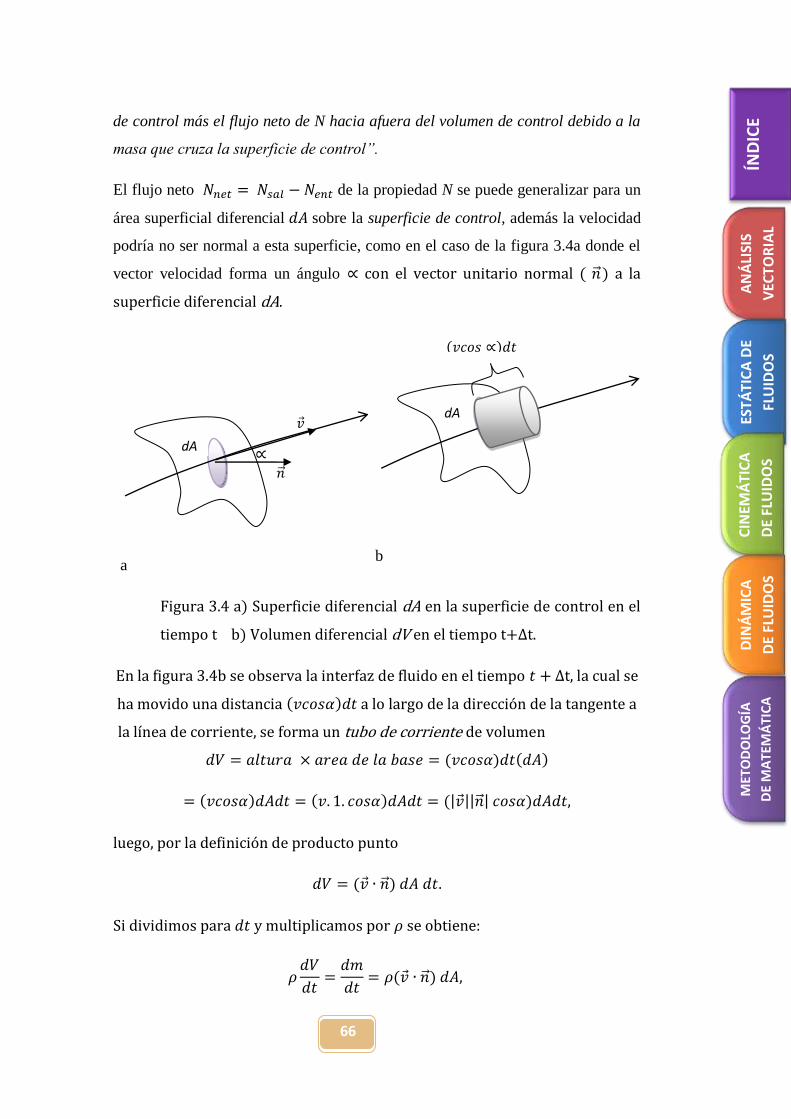
66
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E de control más el flujo neto de N hacia afuera del volumen de control debido a la
masa que cruza la superficie de control”.
El flujo neto 𝑁𝑛𝑒𝑡 = 𝑁𝑠𝑎𝑙 −𝑁𝑒𝑛𝑡 de la propiedad N se puede generalizar para un
área superficial diferencial 𝑑𝐴 sobre la superficie de control, además la velocidad
podría no ser normal a esta superficie, como en el caso de la figura 3.4a donde el
vector velocidad forma un ángulo ∝ con el vector unitario normal ( �⃗⃗�) a la
superficie diferencial dA.
a
b
Figura 3.4 a) Superficie diferencial dA en la superficie de control en el
tiempo t b) Volumen diferencial dV en el tiempo t+∆t.
En la figura 3.4b se observa la interfaz de fluido en el tiempo 𝑡 + ∆t, la cual se
ha movido una distancia (𝑣𝑐𝑜𝑠𝛼)𝑑𝑡 a lo largo de la dirección de la tangente a
la línea de corriente, se forma un tubo de corriente de volumen
𝑑𝑉 = 𝑎𝑙𝑡𝑢𝑟𝑎 × 𝑎𝑟𝑒𝑎 𝑑𝑒 𝑙𝑎 𝑏𝑎𝑠𝑒 = (𝑣𝑐𝑜𝑠𝛼)𝑑𝑡(𝑑𝐴)
= (𝑣𝑐𝑜𝑠𝛼)𝑑𝐴𝑑𝑡 = (𝑣. 1. 𝑐𝑜𝑠𝛼)𝑑𝐴𝑑𝑡 = (|�⃗�||�⃗⃗�| 𝑐𝑜𝑠𝛼)𝑑𝐴𝑑𝑡,
luego, por la definición de producto punto
𝑑𝑉 = (�⃗� ∙ �⃗⃗�) 𝑑𝐴 𝑑𝑡.
Si dividimos para 𝑑𝑡 y multiplicamos por 𝜌 se obtiene:
𝜌𝑑𝑉
𝑑𝑡=𝑑𝑚
𝑑𝑡= 𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴,
∝
�⃗⃗�
�⃗�
dA
dA
(𝑣𝑐𝑜𝑠 ∝)𝑑𝑡

67
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E la tasa instantánea de flujo de masa de fluido, que sale del volumen de control a
través del área 𝑑𝐴.
La tasa de salida de flujo de la propiedad N a través del área 𝑑𝐴, considerando que
𝑁 = 𝑚𝜂 será:
𝜂𝑑𝑚
𝑑𝑡= 𝜂𝜌(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑑𝑁
𝑑𝑡= 𝜂𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴.
Finalmente, por integración se determina la razón de flujo de salida a través de toda
la superficie de control mediante una integral doble.
𝑁𝑛𝑒𝑡 = 𝑁𝑠𝑎𝑙 − 𝑁𝑒𝑛𝑡 =∬𝜂𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑠𝑐
.
(3.11)
La cantidad total de la propiedad 𝑁 dentro del volumen de control la determinamos
mediante integración; utilizando la definición de una integral de volumen o integral
triple, así:
𝑁𝑉𝐶 =∭𝜌𝜂𝑑𝑉
𝑉𝐶
.
3.12
Luego, en la ecuación (3.10) el término 𝑑𝑁𝑉𝐶
𝑑𝑡 , la razón de cambio de la propiedad
𝑁 con respecto al tiempo en el volumen de control, será:
𝑑𝑁𝑉𝐶𝑑𝑡
=𝑑
𝑑𝑡∭𝜌𝜂𝑑𝑉
𝑉𝐶
=𝜕
𝜕𝑡∭𝜌𝜂𝑑𝑉
𝑉𝐶
=∭𝜕
𝜕𝑡𝜌𝜂𝑑𝑉,
𝑉𝐶
(3.13)
donde se reemplazó 𝑑
𝑑𝑡 por
𝜕
𝜕𝑡 porque la cantidad η y la densidad ρ podrían depender
de la posición, además se introdujo dentro de la integral porque el dominio de
integración no cambia en el tiempo.
El teorema de transporte de Reynolds para un volumen de control fijo, se obtiene
de la ecuación (3.10) y las integrales de las ecuaciones (3.11) y (3.13)

68
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑑𝑁𝑠𝑡𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
.
(3.14)
Se ha tomado un resumen del teorema de transporte de Reynolds de la siguiente
bibliografía ([6] págs.121-127; [7] pág. 148-153)
3.2.- Conservación de masa. Ecuación de continuidad.
Un sistema por definición, conserva la misma cantidad de materia, en un volumen
de control la materia no está identificada y no es sencillo probar que la masa se
conserva. La conservación de la masa de un sistema y el teorema de transporte de
Reynolds sirven al pasar de un enfoque de sistemas al de volumen de control
cuando consideramos a la masa M como la propiedad extensiva N, de esta forma la
propiedad intensiva η es la unidad ya que 𝜂 =𝑁
𝑚=𝑀
𝑚= 1 .
A partir del teorema de transporte de Reynolds
𝑑𝑁𝑠𝑡𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝜂𝑑𝑉
𝑉𝐶
+∬𝜂𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
= 0,
como la masa M de cualquier sistema es constante, entonces su razón de cambio en
el tiempo será cero 𝐷𝑀
𝐷𝑡=𝑑𝑀
𝑑𝑡= 0 , así tenemos:
𝑑𝑀𝑠𝑡𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝑑𝑉
𝑉𝐶
+∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
= 0,
luego,
∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
= −∭𝜕
𝜕𝑡𝜌𝑑𝑉.
𝑉𝐶
(3.15)
Es la ecuación de continuidad que se puede expresar como: “la razón neta de flujo
de salida de masa a través de la superficie de control es igual la razón de
disminución con respecto al tiempo de masa dentro del volumen de control”.
69
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La ecuación de la continuidad se expresó en la forma más general, más adelante se
simplificará esta ecuación para diferentes tipos de flujo.
Se puede profundizar en el estudio de la ecuación de continuidad en las siguientes
páginas: ([6] págs.137-141; [7] pág. 175-177)
3.3.- Diferentes tipos de flujos.
El movimiento de fluidos se puede clasificar de diferentes maneras, según sus
características, los flujos pueden ser: permanentes o no permanentes, laminares o
turbulentos, uniformes o no uniformes, rotacionales o irrotacionales, reales o
ideales, etc.
Un flujo es permanente o estacionario cuando las condiciones en todos los puntos
del fluido no cambian o son independientes del tiempo. En un flujo permanente no
existen cambios en el tiempo de: velocidad, densidad, presión, temperatura, es
decir:
𝜕�⃗�
𝜕𝑡= 0,
𝜕𝜌
𝜕𝑡= 0 ,
𝜕𝑃
𝜕𝑡= 0 ,
𝜕𝑇
𝜕𝑡= 0.
Se tiene un flujo no permanente cuando las condiciones del flujo en cualquier punto
cambian con el tiempo, así en algún punto 𝜕�⃗⃗�
𝜕𝑡≠ 0.
Un flujo es laminar cuando las partículas de fluido describen trayectorias regulares
formando aparentemente láminas o capas paralelas que se deslizan suavemente
unas sobre otras.
Un flujo turbulento se presenta cuando un flujo laminar resulta inestable debido
condiciones de baja viscosidad, alta velocidad o conductos de gran dimensión.
Un flujo es rotacional cuando las partículas de fluido dentro de una región de
interés poseen rotación respecto a un eje cualquiera. Se entiende por rotación al
promedio de la velocidad angular de dos elementos infinitesimales de línea fijos en
la partícula, que formen un ángulo recto y sean perpendiculares al eje.
Un flujo es irrotacional cuando no posee rotación.
70
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Un flujo unidimensional es una simplificación en la cual todas las propiedades y
características del flujo se suponen como funciones de una sola variable y el tiempo,
así, se desprecian los cambios de velocidad, presión, etc., transversales a la
dirección del flujo, el flujo a través de un tubo se considera unidimensional
En un flujo bidimensional, todas las propiedades y características del flujo son
funciones de dos coordenadas cartesianas y el tiempo. Si por ejemplo alguna
propiedad del flujo está en función además del tiempo, de las coordenadas 𝑥, 𝑦,
entonces ésta propiedad no cambia a lo largo de la dirección 𝑧 en un instante dado.
El caso más general es el flujo tridimensional en donde las tres componentes
perpendiculares de la velocidad son funciones de las coordenadas x, y, z, y del
tiempo t.
3.4.- Flujos estacionarios. Incompresibles. Irrotacionales 2d y 3d de un fluido
no viscoso.
3.4.1.- Flujo estacionario
Si el flujo es estacionario o también llamado permanente en relación a las
coordenadas fijadas al volumen de control, en la ecuación de continuidad (3.15), se
tiene ∭𝜕
𝜕𝑡𝜌𝑑𝑉
𝑉𝐶= 0 , debido a que las propiedades de un campo de flujo
permanente, incluida la densidad, no varían con el tiempo, así la derivada parcial
con respecto al tiempo es cero. Entonces resulta:
∬𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
= 0.
(3.16)
Se recomienda revisar ([6] pág. 138).
3.4.2.- Flujo incompresible
En el flujo incompresible en un volumen de control lleno de fluido, la densidad es
constante, entonces en la ecuación de continuidad ∭𝜕
𝜕𝑡𝜌𝑑𝑉
𝑉𝐶= 0, luego:
71
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
∬𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
= 0,
y, cancelando la densidad tenemos:
∬(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
= 0,
(3.17)
lo que indica que para cualquier flujo incompresible, la conservación de la masa
se reduce a la conservación de volumen.
Se ha realizado un resumen de los flujos permanente e incompresible de: ([6] pág.
138, 139).
3.4.3.- Flujo irrotacional
Analizando el movimiento en el plano XY (figura 3.5) de un elemento de fluido en
el tiempo 𝑡 y luego en el incremento de tiempo ∆𝑡, se observa que además de
trasladarse, el elemento de fluido se deforma y gira. Los ángulos son positivos, el
ángulo promedio de rotación es: 𝛼+𝛽
2, y la razón de rotación o velocidad angular en
el plano XY es la derivada respecto al tiempo del ángulo promedio de rotación 𝛼+𝛽
2:
𝜔𝑧 =𝑑
𝑑𝑡(𝛼 + 𝛽
2) ,
𝜔𝑧 =1
2(𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥𝜕𝑦).
(3.18)
De la misma forma se tiene la razón de rotación en el plano YZ
𝜔𝑥 =1
2(𝜕𝑣𝑧𝜕𝑦−𝜕𝑣𝑦
𝜕𝑧).
(3.19)
Y la razón de rotación en el plano XZ
𝜔𝑦 =1
2(𝜕𝑣𝑥𝜕𝑧−𝜕𝑣𝑧𝜕𝑥).
(3.20)

72
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 3.5 Rotación de un elemento de fluido ([8] página173).
Luego, en tres dimensiones se define el vector de razón de rotación en un punto en
el flujo como:
�⃗⃗⃗� = 𝜔𝑥⃗⃗⃗⃗⃗⃗ + 𝜔𝑦⃗⃗⃗⃗⃗⃗ + 𝜔𝑧⃗⃗ ⃗⃗ ⃗,
�⃗⃗⃗� =1
2(𝜕𝑣𝑧𝜕𝑦−𝜕𝑣𝑦
𝜕𝑧) 𝑖 +
1
2(𝜕𝑣𝑥𝜕𝑧−𝜕𝑣𝑧𝜕𝑥) 𝑗 +
1
2(𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥𝜕𝑦) �⃗⃗�.
(3.21)
La ecuación anterior se la puede expresar mediante el producto vectorial ∇⃗⃗⃗ × 𝑣 ⃗⃗⃗ ⃗,
así: ∇⃗⃗⃗ × 𝑣 ⃗⃗⃗ ⃗ = |
𝑖 𝑗 �⃗⃗�𝜕
𝜕𝑥
𝜕
𝜕𝑦
𝜕
𝜕𝑧
𝑣𝑥 𝑣𝑦 𝑣𝑧
| = (𝜕𝑣𝑧
𝜕𝑦−𝜕𝑣𝑦
𝜕𝑧) 𝑖 + (
𝜕𝑣𝑥
𝜕𝑧−𝜕𝑣𝑧
𝜕𝑥) 𝑗 + (
𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥
𝜕𝑦) �⃗⃗� ,
entonces :
�⃗⃗⃗� =1
2∇ × 𝑣 ⃗⃗⃗ ⃗ =
1
2𝑟𝑜𝑡(𝑣),
(3.21)
o también
∇ × 𝑣 ⃗⃗⃗ ⃗ = 𝑟𝑜𝑡(𝑣) = 2�⃗⃗⃗�. (3.22)
Al vector ∇⃗⃗⃗ × 𝑣 ⃗⃗⃗ ⃗ se conoce como vorticidad la cual indica la medida de la rotación
de una partícula de fluido. Si la vorticidad en punto es cero, esto es, si
∇⃗⃗⃗ × 𝑣 ⃗⃗⃗ ⃗ = 0,
entonces el flujo es irrotacional, luego se tiene que para un flujo irrotacional se
requiere que:
𝜕𝑣𝑧𝜕𝑦−𝜕𝑣𝑦
𝜕𝑧= 0,
𝜕𝑣𝑥𝜕𝑧−𝜕𝑣𝑧𝜕𝑥= 0,
𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥𝜕𝑦
= 0. (3.23)

73
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Así mismo, si la vorticidad en un punto en un campo de flujo es diferente de cero,
la partícula de fluido que llegue a ocupar ese punto en el espacio, está girando, se
dice que el flujo en esa región es rotacional.
Para el resumen del flujo irrotacional se ha revisado el siguiente texto: ([8] págs.
173-174)
3.4.4.- La función corriente
La ecuación de continuidad para un flujo bidimensional incompresible es:
∇ ∙ 𝑣 ⃗⃗⃗ ⃗ = 𝜕𝑣𝑥𝜕𝑥+𝜕𝑣𝑦
𝜕𝑦= 0.
(3.33)
Lo que significa que 𝜕𝑣𝑦
𝜕𝑦= −
𝜕𝑣𝑥
𝜕𝑥 ; luego si 𝑣𝑥 = 𝐹(𝑥, 𝑦) = (
𝜕
𝜕𝑦𝜓(𝑥, 𝑦)) entonces:
𝑣𝑦 = −∫𝜕𝐹
𝜕𝑥𝑑𝑦,
luego,
𝜕𝑣𝑦
𝜕𝑦= −
𝜕
𝜕𝑥(𝜕𝜓
𝜕𝑦),
𝜕
𝜕𝑦(𝑣𝑦 +
𝜕𝜓
𝜕𝑥) = 0.
La condición para la ecuación anterior es que es que:
𝑣𝑦 +𝜕𝜓
𝜕𝑥= 0, o también
𝑣𝑦 = −𝜕𝜓
𝜕𝑥 .
(3.34a)
Así mismo se obtiene:
𝑣𝑥 =𝜕𝜓
𝜕𝑦.
(3.34b)
La función 𝜓 = 𝜓(𝑥, 𝑦) se le llama función de corriente, la cual representa a las
líneas de corriente. La derivada total de 𝜓(𝑥, 𝑦) es:

74
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑑𝜓 =𝜕𝜓
𝜕𝑥𝑑𝑥 +
𝜕𝜓
𝜕𝑦𝑑𝑦,
luego con 𝑣𝑥 =𝜕𝜓
𝜕𝑦 y 𝑣𝑦 = −
𝜕𝜓
𝜕𝑥 tenemos:
𝑑𝜓 = −𝑣𝑥𝑑𝑥 + 𝑣𝑦𝑑𝑦. (3.35)
Si reemplazamos 𝑣𝑥 y 𝑣𝑦 en la ecuación de la velocidad angular en la rotación de
un flujo bidimensional se obtiene:
𝜔𝑧 =1
2(𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥𝜕𝑦) =
1
2(𝜕
𝜕𝑥(−𝜕𝜓
𝜕𝑥) −
𝜕
𝜕𝑦
𝜕𝜓
𝜕𝑦) = −
1
2(𝜕2𝜓
𝜕𝑥2+𝜕2𝜓
𝜕𝑦2),
o también.
−2𝜔 =𝜕2𝜓
𝜕𝑥2+𝜕2𝜓
𝜕𝑦2= ∇2𝜓,
(3.36)
luego, para un flujo irrotacional:
∇2𝜓 =𝜕2𝜓
𝜕𝑥2+𝜕2𝜓
𝜕𝑦2= 0.
(3.37)
La función corriente y las ecuaciones precedentes se las puede revisar en: ([8]
págs.175-176)
3.4.5.- Potencial de la velocidad
De la condición de irrotacionalidad (ecuación 3.23) 𝜕𝑣𝑦
𝜕𝑥−𝜕𝑣𝑥
𝜕𝑦= 0,
se observa que es la condición para que la ecuación 𝑣𝑥𝑑𝑥 + 𝑣𝑦𝑑𝑦 = 0 sea exacta,
es decir, esta ecuación debe ser la derivada total de una función que la denotaremos
como ∅, entonces:
𝑣𝑥𝑑𝑥 + 𝑣𝑦𝑑𝑦 = 𝑑∅ =𝜕∅
𝜕𝑥𝑑𝑥 +
𝜕∅
𝜕𝑦𝑑𝑦 = 0.
Una función escalar 𝜙 se conoce como potencial de velocidad, si las componentes
de la velocidad en todos los puntos de una región del flujo expresadas como:

75
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑣𝑥 =𝜕𝜙
𝜕𝑥,
3.38a
𝑣𝑦 =𝜕𝜙
𝜕𝑦,
3.38b
𝑣𝑧 =𝜕𝜙
𝜕𝑧,
3.38c
representan un flujo irrotacional. Luego, en forma vectorial, la velocidad de flujo
es:
�⃗� = 𝑣𝑥𝑖 + 𝑣𝑦𝑗 + 𝑣𝑧�⃗⃗�,
�⃗� =𝜕𝜙
𝜕𝑥𝑖 +𝜕𝜙
𝜕𝑦𝑗 +𝜕𝜙
𝜕𝑧�⃗⃗�,
o también
�⃗� = ∇𝜙. (3.38)
Reemplazando las ecuaciones anteriores en la condición de irrotacionalidad
(ecuaciones 3.23), se tiene:
𝜕2𝜙
𝜕𝑦𝜕𝑧−𝜕2𝜙
𝜕𝑧𝜕𝑦𝑧= 0,
(3.39a)
𝜕2𝜙
𝜕𝑧𝜕𝑥−𝜕2𝜙
𝜕𝑥𝜕𝑧= 0,
(3.39b)
𝜕2𝜙
𝜕𝑥𝜕𝑦−𝜕2𝜙
𝜕𝑦𝜕𝑥= 0.
(3.39c)
Las ecuaciones del potencial de la velocidad se encuentran en: ([6] págs. 505-506)
3.4.6. Relación entre la función de corriente y el potencial de velocidad
Para un flujo irrotacional se estableció las velocidades relacionadas con la función
de corriente como:
𝑣𝑥 =𝜕𝜓
𝜕𝑦 y 𝑣𝑦 = −
𝜕𝜓
𝜕𝑥 ,
además, para el flujo bidimensional, el potencial de la velocidad se definió como:
𝑣𝑥 =𝜕𝜙
𝜕𝑥 y 𝑣𝑦 =
𝜕𝜙
𝜕𝑦 .
Comparando éstos resultados podemos concluir lo siguiente:
𝜕𝜓
𝜕𝑦=𝜕𝜙
𝜕𝑥 ,
(3.40a)
𝜕𝜓
𝜕𝑥= −
𝜕𝜙
𝜕𝑦.
(3.40b)
76
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Integrando las ecuaciones anteriores resultan:
∫𝜕𝜓
𝜕𝑦= ∫
𝜕𝜙
𝜕𝑥 ⇒ 𝜓 = ∫
𝜕𝜙
𝜕𝑥𝑑𝑦 + 𝑓(𝑥) ,
(3.41a)
∫𝜕𝜓
𝜕𝑥= −∫
𝜕𝜙
𝜕𝑦 ⇒ 𝜓 = −∫
𝜕𝜙
𝜕𝑦𝑑𝑥 + 𝑔(𝑦).
(3.41b)
Ecuaciones que permiten encontrar la función de corriente, si se conoce el
potencial de la velocidad. Estás ecuaciones se encuentran en: ([6] págs. 511).
En coordenadas polares se tienen las siguientes relaciones entre la función de
corriente y el potencial de velocidades.
𝜕∅
𝜕𝑟=𝜕𝜓
𝑟𝜕𝜃 ,
(3.42a)
𝜕∅
𝑟𝜕𝜃= −
𝜕𝜓
𝜕𝑟 .
(3.42b)
La demostración formal de de las relaciones de la función corriente y el potencial
de velocidades en coordenadas polares se encuentran en: ([6] págs. 516-518).
3.4.7. Flujo uniforme
3.4.7.1. Flujo uniforme bidimensional
Cuando la velocidad de flujo es constante, se tiene un flujo uniforme. El potencial
de velocidad (definido en Ω ⊂ ℝ2) para un flujo uniforme bidimensional es de la
forma:
La representación del flujo uniforme se tiene en la figura 3.6, las líneas verticales
son las de potencial constante.
∅ = 𝑣0 𝑥. (3.43)
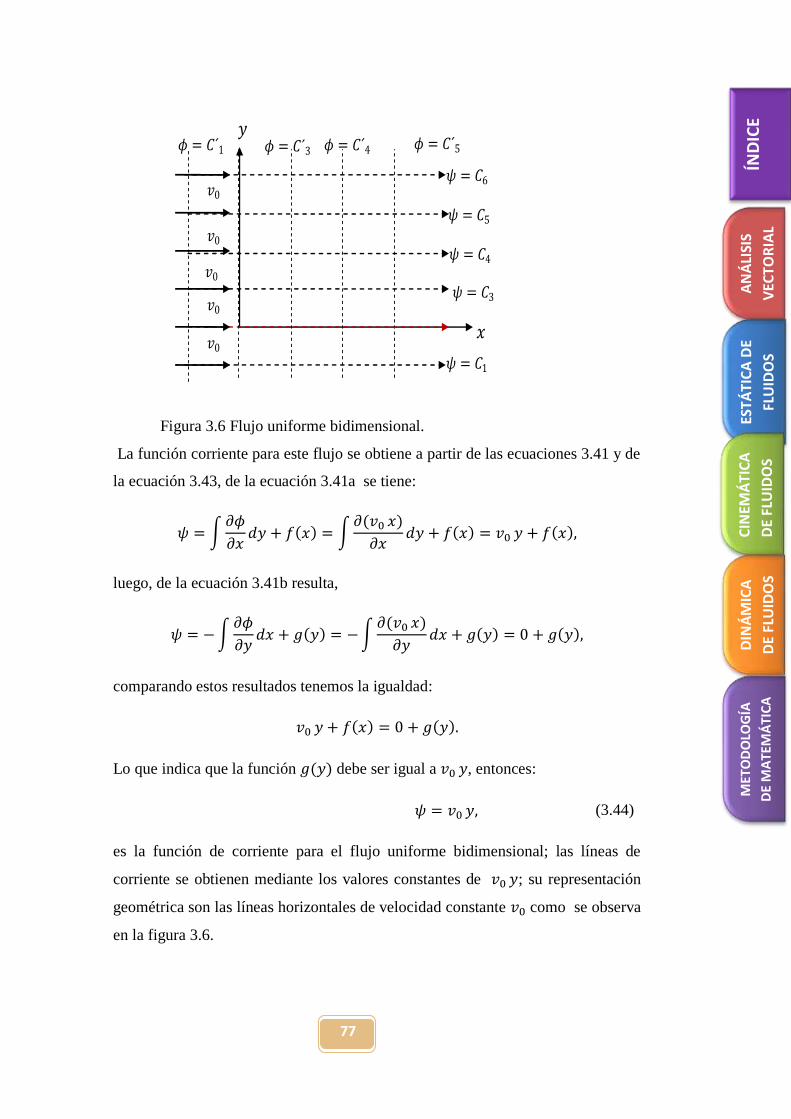
77
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 3.6 Flujo uniforme bidimensional.
La función corriente para este flujo se obtiene a partir de las ecuaciones 3.41 y de
la ecuación 3.43, de la ecuación 3.41a se tiene:
𝜓 = ∫𝜕𝜙
𝜕𝑥𝑑𝑦 + 𝑓(𝑥) = ∫
𝜕(𝑣0 𝑥)
𝜕𝑥𝑑𝑦 + 𝑓(𝑥) = 𝑣0 𝑦 + 𝑓(𝑥),
luego, de la ecuación 3.41b resulta,
𝜓 = −∫𝜕𝜙
𝜕𝑦𝑑𝑥 + 𝑔(𝑦) = −∫
𝜕(𝑣0 𝑥)
𝜕𝑦𝑑𝑥 + 𝑔(𝑦) = 0 + 𝑔(𝑦),
comparando estos resultados tenemos la igualdad:
𝑣0 𝑦 + 𝑓(𝑥) = 0 + 𝑔(𝑦).
Lo que indica que la función 𝑔(𝑦) debe ser igual a 𝑣0 𝑦, entonces:
𝜓 = 𝑣0 𝑦, (3.44)
es la función de corriente para el flujo uniforme bidimensional; las líneas de
corriente se obtienen mediante los valores constantes de 𝑣0 𝑦; su representación
geométrica son las líneas horizontales de velocidad constante 𝑣0 como se observa
en la figura 3.6.
𝜙 = 𝐶´1
𝜓 = 𝐶6
𝜓 = 𝐶1
𝑣0
𝑣0
𝑣0
𝜙 = 𝐶´5
𝑣0
𝑣0
𝜙 = 𝐶´4 𝜙 = 𝐶´3
𝜓 = 𝐶5
𝜓 = 𝐶4
𝜓 = 𝐶3
𝑥
𝑦
78
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 3.4.7.2. Flujo uniforme tridimensional
Un flujo uniforme tridimensional en coordenadas esféricas con velocidad 𝑣0 tiene
como ecuaciones de velocidad:
𝑣𝑅 = 𝑣0𝑐𝑜𝑠𝛽, 3.45a
𝑣𝛽 = −𝑣0𝑠𝑒𝑛𝛽. 3.45b
La función de potencial y la función de corriente son respectivamente:
𝜙 = 𝑅𝑣0𝑐𝑜𝑠𝛽, 3.46a
𝜓 =𝑣0𝑅
2𝑠𝑒𝑛2𝛽
2.
3.46b
Se recomienda verificar las ecuaciones anteriores en: ([6] págs. 550).
3.4.8. Fuentes y sumideros
3.4.8.1. Fuentes y sumideros bidimensionales
Se considera una fuente bidimensional a un patrón de líneas de corriente
representado en la figura 3.7, donde emana fluido desde el origen y se dirige al
infinito, si el flujo es hacia el origen entonces se considera un sumidero. La
intensidad I de la fuente es el gasto o caudal de fluido a través de la circunferencia
de radio r, entonces la velocidad en un punto a una distancia radial r será igual a la
intensidad del caudal, dividida entre la longitud de la circunferencia que la
atraviesa, es decir:
𝑣 =𝐼
2𝜋𝑟 ,
3.47
luego, la velocidad en cualquier dirección es la derivada de la función potencial con
respecto a esa dirección así se tiene:
𝑣𝑟 =𝜕∅
𝜕𝑟=
𝐼
2𝜋𝑟,
3.48a
𝑣𝜃 =𝜕∅
𝜕𝜃= 0.
3.48b

79
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Integrando la ecuación 3.48a se obtiene la función potencial
∅ =𝐼
2𝜋ln 𝑟,
(3.49)
donde 𝐼 es la intensidad de la fuente o sumidero, entonces I es el caudal que entra
o sale a través de una superficie de control asociada a cualquier banda circular con
centro en el origen.
Los valores de potencial constante, es decir
∅ =𝐼
2𝜋ln 𝑟 = 𝐶´,
representan círculos concéntricos como se observa en la figura 3.7; así como
también los valores constantes de la función corriente están representados por la
familia de rectas que salen del origen.
Figura 3.7 Fuente bidimensional
La función de corriente la obtenemos a partir de la ecuación 3.34 junto con las
ecuaciones que relacionan la función de potencial y de corriente en coordenadas
polares; al integrar las ecuaciones 3.42 se tiene:
∫𝜕𝜓
𝑟𝜕𝜃= ∫
𝜕∅
𝜕𝑟 ⇒ 𝜓 = ∫𝑟
𝜕∅
𝜕𝑟𝑑𝜃 + 𝑔(𝑟),

80
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
∫−𝜕𝜓
𝜕𝑟= ∫
𝜕∅
𝑟𝜕𝜃 ⇒ 𝜓 = −∫
1
𝑟
𝜕∅
𝜕𝜃𝑑𝑟 + ℎ(𝜃).
Entonces de obtiene:
𝜓 = ∫𝑟𝜕∅
𝜕𝑟𝑑𝜃 + 𝑔(𝑟) = ∫𝑟
𝜕(𝐼2𝜋 ln 𝑟)
𝜕𝑟𝑑𝜃 + 𝑔(𝑟)
⇒ 𝜓 =
𝐼
2𝜋𝜃 + 𝑔(𝑟),
𝜓 = −∫1
𝑟
𝜕∅
𝜕𝜃𝑑𝑟 + ℎ(𝜃) = −∫
1
𝑟
𝜕(𝐼2𝜋 ln 𝑟)
𝜕𝜃𝑑𝑟 + ℎ(𝜃)
⇒ 𝜓 = 0 + ℎ(𝜃).
Al igualar estos resultados tenemos:
𝐼
2𝜋𝜃 + 𝑔(𝑟) = 0 + ℎ(𝜃),
o también
𝐼
2𝜋𝜃 = ℎ(𝜃),
Lo que indica que la función ℎ debe ser la función de corriente buscada, luego:
𝜓 =𝐼
2𝜋𝜃.
3.50
De la función de corriente se obtienen las líneas de corriente dadas por las
ecuaciones:
𝜓 =𝐼
2𝜋𝜃 = 𝐶.
El resumen precedente se ha tomado de:([6] págs. 524-525;[10]págs.146-148).
3.4.8.2. Fuentes y sumideros tridimensionales
Una fuente tridimensional se constituye en un punto a través del cual emana fluido
en todas direcciones, si el gasto es uniforme a través de la superficie que encierra a
la fuente, entonces la velocidad en un punto situado a una distancia R será igual a
81
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E la intensidad m del gasto dividida para el área de una esfera con su centro ubicado
en la fuente, entonces:
𝑣𝑅 =𝑚
4𝜋𝑅2. 3.51
Ya que la única componente de velocidad esférica que es diferente de cero es 𝑣𝑅.
Analizando el campo de velocidades se concluye que el flujo sigue radialmente
hacia afuera desde el origen, entonces se tiene un flujo desde una fuente
tridimensional.
Al igual que en el flujo bidimensional, la velocidad en cualquier dirección es la
derivada de la función potencial en esa dirección, entonces la velocidad en la
dirección radial será:
𝜕∅
𝜕𝑅=
𝑚
4𝜋𝑅2,
3.52
de donde al integrar resulta la función de potencial para una fuente tridimensional:
𝜙 = −𝑚
4𝜋𝑅. 3.53
La función de corriente correspondiente a una fuente tridimensional es:
𝜓 = −𝑚
4𝜋 𝑐𝑜𝑠𝛽, 3.54
donde 𝑚 es el caudal o intensidad de la fuente o del sumidero tridimensional.
Las ecuaciones de las fuentes y sumideros tridimensionales se las ha tomado de:
([6] págs. 551; [10] págs.146-148).
3.4.9. Dobletes
3.4.9.1. Doblete bidimensional
Cuando combinamos o superponemos una fuente y un sumidero bidimensionales,
se obtiene un doblete bidimensional; la función de potencial y las líneas de potencial
constante, tienen como ecuaciones respectivamente:
∅ =𝑋𝑐𝑜𝑠𝜃
𝑟,
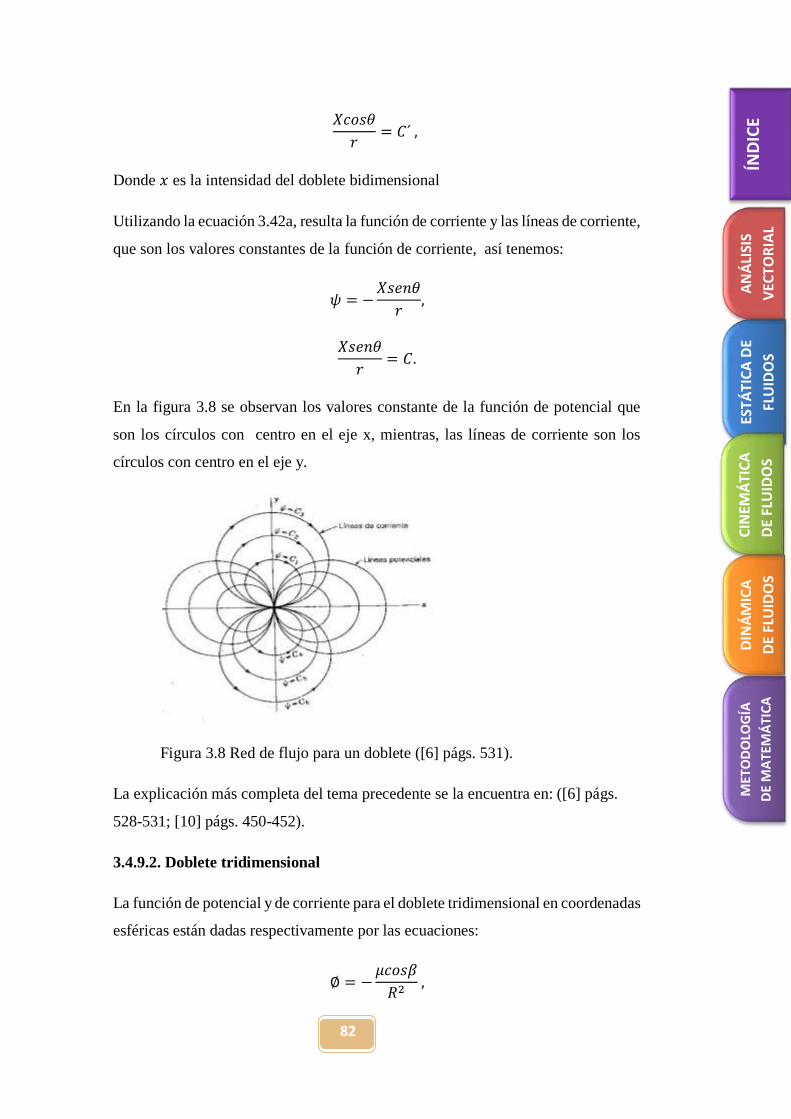
82
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝑋𝑐𝑜𝑠𝜃
𝑟= 𝐶´ ,
Donde 𝑥 es la intensidad del doblete bidimensional
Utilizando la ecuación 3.42a, resulta la función de corriente y las líneas de corriente,
que son los valores constantes de la función de corriente, así tenemos:
𝜓 = −𝑋𝑠𝑒𝑛𝜃
𝑟,
𝑋𝑠𝑒𝑛𝜃
𝑟= 𝐶.
En la figura 3.8 se observan los valores constante de la función de potencial que
son los círculos con centro en el eje x, mientras, las líneas de corriente son los
círculos con centro en el eje y.
Figura 3.8 Red de flujo para un doblete ([6] págs. 531).
La explicación más completa del tema precedente se la encuentra en: ([6] págs.
528-531; [10] págs. 450-452).
3.4.9.2. Doblete tridimensional
La función de potencial y de corriente para el doblete tridimensional en coordenadas
esféricas están dadas respectivamente por las ecuaciones:
∅ = −𝜇𝑐𝑜𝑠𝛽
𝑅2 ,

83
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝜓 =𝜇𝑠𝑒𝑛2𝛽
𝑅,
donde 𝜇 es la intensidad o caudal del doblete.
La explicación detallada de éstas ecuaciones se la encuentra en: ([6] páginas. 552-
553).
3.5.- Flujo de un fluido alrededor de una esfera y de un obstáculo cilíndrico.
El estudio del flujo alrededor de una esfera y de un obstáculo cilíndrico constituye
una idealización matemática que requiere el análisis previo de otros flujos más
simples como son: el flujo uniforme, fuentes, sumideros, doblete.
3.5.1.-Flujo alrededor de un obstáculo cilíndrico
Se obtiene un modelo matemático del flujo alrededor de un cilindro, cuando
combinamos el flujo uniforme y un doblete bidimensionales de la forma indicada
en la figura 3.9
El potencial y la función de corriente combinados resultan:
∅ = 𝑣0 𝑥 +𝑋𝑐𝑜𝑠𝜃
𝑟,
𝜓 = 𝑣0 𝑦 −𝑋𝑠𝑒𝑛𝜃
𝑟.
Si analizamos la línea de corriente cuyo valor es cero, es decir:
𝜓 = 𝑣0 𝑦 −𝑋𝑠𝑒𝑛𝜃
𝑟= 𝑣0𝑟𝑠𝑒𝑛𝜃 −
𝑋𝑠𝑒𝑛𝜃
𝑟= 𝑠𝑒𝑛𝜃 (𝑣0𝑟 −
𝑋
𝑟) = 0.
Se obtienen valores para 𝜃 y 𝑟 que satisfacen esta condición, así, para 𝑠𝑒𝑛𝜃 = 0
se tiene, 𝜃 = 0 o también 𝜃 = 𝜋, luego, para (𝑣0𝑟 −𝑋
𝑟) = 0 se tiene 𝑟 = √𝑋/𝑣0.
Esto indica que 𝜓 = 0 cuando la línea de corriente tiene una dirección de 0 grados
y de 180 grados con respecto al eje x, además cuando describe un círculo de radio
𝑟 = √𝑋/𝑣0 como se indica en la figura 3.9 . Esta sería la frontera de un cilindro

84
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E cuyo eje coincide con el eje z, con un flujo representado por los valores constantes
de la función corriente.
Figura 3.9 Idealización del flujo alrededor de un cilindro ([6] pág. 536).
Las velocidades radial y tangencial en coordenadas polares se obtiene mediante las
ecuaciones:
𝑣𝑟 =𝜕∅
𝜕𝑟,
𝑣𝜃 =𝜕∅
𝑟𝜕𝜃,
luego, la velocidad radial y tangencial para un flujo alrededor de un cilindro son
respectivamente:
𝑣𝑟 = 𝑣0𝑐𝑜𝑠𝜃 −𝑋𝑐𝑜𝑠𝜃
𝑟2,
𝑣𝜃 = −𝑣0𝑠𝑒𝑛𝜃 −𝑋𝑠𝑒𝑛𝜃
𝑟2 .
El resumen anterior se encuentra en: ([6] págs. 535-536).
3.5.2.- Flujo alrededor de una esfera
Mediante la combinación de un flujo uniforme con velocidad 𝑣0 y un doblete
tridimensional se obtiene un flujo alrededor de una esfera, entonces, la función de
corriente combinada será:

85
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝜓 =𝑣0𝑅
2𝑠𝑒𝑛2𝛽
2+𝜇𝑠𝑒𝑛2𝛽
𝑅.
A partir de ésta ecuación establecemos las condiciones para las cuales la función de
corriente forma una superficie en forma de una esfera, sabemos que la frontera de
esta esfera tendrá como condición inicial 𝜓 = 0, entonces, si 𝜇 = 𝑣0𝑏3/2 se tiene:
𝜓 =𝑣0𝑅
2𝑠𝑒𝑛2𝛽
2+𝑣0𝑏
3𝑠𝑒𝑛2𝛽
2𝑅= 0,
𝑣0𝑠𝑒𝑛2𝛽
2(𝑅2 −
𝑏3
𝑅) = 0.
Esta ecuación indica que 𝜓 = 0 cuando 𝛽 = 0 o también cuando 𝛽 = 𝜋, o cuando
𝑏 = 𝑅, y, precisamente, estas condiciones hacen que la línea de corriente forme una
esfera cuando 𝜓 = 0, situación que se indica en la figura 3.10.
Figura 3.10 Idealización del flujo alrededor de una esfera ([6] pág. 554).
Se han resumido las ecuaciones del flujo alrededor de una esfera de ([6] pág. 553).
3.6.- Importancia de los modelos matemáticos.
La descripción matemática de un sistema o fenómeno de la vida real se llama
modelo matemático. Los fenómenos descritos pueden ser físicos, como por ejemplo
los modelos matemáticos en mecánica de fluidos, estudiados en este trabajo;
sociales como el crecimiento de la población; o económicos como la capitalización
continua del interés.
El modelado de muchos de los sistemas físicos comprende la obtención de
ecuaciones que relacionan los cambios entre las variables que intervienen en el
86
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E sistema; estas tazas o razones de cambio de una o más variables son las hipótesis
expresadas como derivadas, entonces el modelo matemático es una ecuación o
sistema de ecuaciones diferenciales, funcionales lineales o no lineales en dimensión
finita o infinita.
Cuando en un sistema físico se obtiene un modelo matemático que involucra una
tasa de cambio, es decir las variables, dependen del tiempo 𝑡, la solución del modelo
expresa el estado del sistema, así, se puede establecer la condición del sistema en
el pasado, presente y futuro, haciendo posible predecir un suceso antes de que este
ocurra. Es posible también mediante formulación de un modelo matemático,
estudiar varios aspectos de un sistema físico, sin llevar a cabo experimentos reales
o a escala que resultan caros y demoran demasiado.
El enfoque experimental de un fenómeno, es decir tomando mediciones y haciendo
pruebas tiene la ventaja de ser real, pero además de ser caro y tardado, como se
mencionó, es poco práctico en comparación con el enfoque analítico, el cual además
de lo mencionado, tiene la ventaja de que no es caro y es mucho más rápido, aunque
los resultados dependen de las hipótesis, idealizaciones y aproximaciones
establecidas en el análisis.

87
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CAPÍTULO 4
DINÁMICA DE FLUIDOS NO VISCOSOS
Resumen
En este capítulo se deducen las ecuaciones de Euler, la ecuación de conservación
de energía, la ecuación de Bernoulli y las ecuaciones de Navier-Stokes. La ecuación
de Euler se deduce a partir de la segunda ley de Newton, la ecuación de energía es
el enunciado del principio de conservación de la energía, la ecuación de Bernoulli
se refiere a la conservación de la energía cinética, potencial y energía de flujo de un
fluido a lo largo de una línea de corriente, además se muestran algunas aplicaciones.
Las ecuaciones de Navier-Stokes son las formas diferenciales de la segunda ley de
Newton.
En cada tema tratado se indica la bibliografía utilizada y los textos recomendados
para aclarar y profundizar el presente trabajo.
4.1.- Ecuación de Euler
Se define el momento lineal de una masa dm al producto vectorial 𝑑𝑚�⃗� . La
segunda ley de Newton relacionada al momento lineal queda determinada como:
𝑑𝐹 =𝐷
𝐷𝑡(𝑑𝑚�⃗�).
(4.1)
Esta ecuación puede escribirse como:
𝑑𝐹 =𝐷
𝐷𝑡(𝑑𝑚�⃗�) = 𝑑𝑚
𝐷�⃗�
𝐷𝑡= 𝑑𝑚(𝑢
𝜕�⃗�
𝜕𝑥+ 𝑣
𝜕�⃗�
𝜕𝑦+ 𝑤
𝜕�⃗�
𝜕𝑧+𝜕�⃗�
𝜕𝑡),
cuando �⃗� representa un campo vectorial de velocidades �⃗�(𝑥, 𝑦, 𝑧, 𝑡).
Luego, dividiendo para dm se obtiene:
𝑑𝐹
𝑑𝑚= (𝑢
𝜕�⃗�
𝜕𝑥+ 𝑣
𝜕�⃗�
𝜕𝑦+ 𝑤
𝜕�⃗�
𝜕𝑧) +
𝜕�⃗�
𝜕𝑡.
(4.2)
Las fuerzas que actúan sobre un elemento infinitesimal de masa dm son las fuerzas
debido a la presión (fuerza superficial=−(∇𝑝)𝑑𝑉) y la fuerza debida a la gravedad
(peso=−(𝑑𝑚)𝑔𝑗 = −(𝜌𝑑𝑉)𝑔(∇y). Luego se tiene
𝑑𝐹 = −(∇𝑝)𝑑𝑉 − (𝜌𝑑𝑉)𝑔(∇y),
88
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Así tenemos
𝑑𝐹
𝑑𝑚=−(∇𝑝)𝑑𝑉 − (𝜌𝑑𝑉)𝑔(∇y)
𝜌𝑑𝑉
= −1
𝜌∇𝑝 − 𝑔∇y.
(4.3)
Con los resultados anteriores; igualando las ecuaciones 4.2 y 4.3, se establece la
ecuación de Euler:
−1
𝜌∇𝑝 − 𝑔∇𝑦 = (𝑢
𝜕�⃗�
𝜕𝑥+ 𝑣
𝜕�⃗�
𝜕𝑦+ 𝑤
𝜕�⃗�
𝜕𝑧) +
𝜕�⃗�
𝜕𝑡
=𝐷�⃗�
𝐷𝑡.
(4.4)
Esta ecuación se la puede escribir como:
−1
𝜌∇𝑝 − 𝑔∇y = (�⃗� ∙ ∇)�⃗� +
𝜕�⃗�
𝜕𝑡
(4.5)
ya que
(�⃗� ∙ ∇)�⃗� = ((𝑢, 𝑣, 𝑤) ∙ (𝜕
𝜕𝑥,𝜕
𝜕𝑦,𝜕
𝜕𝑧)) �⃗� = 𝑢
𝜕�⃗⃗�
𝜕𝑥+ 𝑣
𝜕�⃗⃗�
𝜕𝑦+𝑤
𝜕�⃗⃗�
𝜕𝑧.
La ecuación de Euler se ha tomado de ([6] págs. 240,241).
4.2.- Conservación de la energía. Ecuación de Bernoulli
El principio de conservación de energía o balance de energía se expresa como:
𝐸𝑒𝑛𝑡 − 𝐸𝑠𝑎𝑙 = ∆𝐸, (4.6)
ecuación que indica que la energía neta transferida a un sistema, o extraída de él
durante un proceso, es igual al cambio en el contenido de energía de ese sistema.
Se extrae o transfiere energía por medio de calor o trabajo, en la ecuación anterior,
𝐸𝑒𝑛𝑡 es la razón de transferencia de energía hacía dentro y 𝐸𝑠𝑎𝑙 es la razón de
transferencia hacia afuera del sistema, E representa la energía total.
La primera ley de la termodinámica establece que el calor agregado Q a un sistema,
menos el trabajo W realizado por éste depende sólo de los estados inicial y final del
sistema.
La primera ley de la termodinámica quedará expresada como:
𝑄 −𝑊 = 𝐸𝑒𝑛𝑡 − 𝐸𝑠𝑎𝑙 = ∆𝐸 ,

89
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E ecuación que en forma diferencial se expresa mediante 𝑑𝑄 − 𝑑𝑊 = 𝑑𝐸 , luego,
como se trata de un sistema, utilizamos la derivada sustancial así:
𝐷𝐸
𝐷𝑡=𝑑𝑄
𝑑𝑡−𝑑𝑊
𝑑𝑡.
(4.7)
Para obtener una relación de la conservación de la energía para un volumen de
control, se aplica el teorema de transporte de Reynolds (ecuación 3.14)
𝐷𝑁𝑠𝑡
𝐷𝑡=∭
𝜕
𝜕𝑡𝜌𝜂𝑑𝑉
𝑉𝐶+∬ 𝜂𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶,
según el cual “la razón de cambio con respecto al tiempo de la propiedad N del
sistema es igual a la razón de cambio con respecto al tiempo de N en el volumen
de control más el flujo neto de N hacia afuera del volumen de control debido a la
masa que cruza la superficie de control”.
Se reemplaza N con la energía E y 𝜂 con la energía por unidad de masa e.
𝐷𝐸𝑠𝑡𝐷𝑡
=∭𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶
+∬𝑒𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
,
(4.8)
luego resulta:
𝑑𝑄
𝑑𝑡−𝑑𝑊
𝑑𝑡=∭
𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶
+∬𝑒𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴.
𝑆𝐶
(4.9)
Ecuación que indica que “la tasa neta de energía transferida hacia el volumen
de control por calor y trabajo, es igual a la tasa de incremento de energía en
el volumen de control más la tasa de flujo de salida de energía desde el
volumen de control”. ([6] pág. 203).
El trabajo desarrollado por el sistema sobre sus alrededores se puede descomponer
en el trabajo efectuado por las fuerzas de presión sobre las fronteras móviles 𝑊𝑝 y
el trabajo de las fuerzas cortantes 𝑊𝑠 , o sea 𝑊 =𝑊𝑝 +𝑊𝑠 . El trabajo en principio
es fuerza multiplicada por una distancia (𝑊 = 𝐹. 𝑠 = 𝑝. 𝐴. 𝑠), además la distancia
recorrida por unidad de tiempo es velocidad, con esto se establece que la razón del
trabajo respecto al tiempo de las fuerzas de presión sobre un área infinitesimal 𝑑𝐴
es:
90
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 𝑑𝑊𝑝
𝑑𝑡= 𝑝𝑑𝐴
𝑑𝑆
𝑑𝑡= 𝑝(�⃗� ∙ �⃗⃗�)𝑑𝐴,
(4.10)
luego, aplicando la última ecuación a toda la superficie del volumen de control se
tiene:
𝑑𝑊𝑝
𝑑𝑡= ∬𝑝(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑆𝐶
=∬𝑝𝜌
𝜌(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑆𝐶
.
(4.11)
Desarrollando el miembro izquierdo de la ecuación 4.9 y reemplazando la ecuación
anterior (4.11) tenemos:
𝑑𝑄
𝑑𝑡−𝑑𝑊
𝑑𝑡=𝑑𝑄
𝑑𝑡−𝑑𝑊𝑝
𝑑𝑡−𝑑𝑊𝑠𝑑𝑡
=𝑑𝑄
𝑑𝑡−∬𝑝
𝜌
𝜌(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑆𝐶
−𝑑𝑊𝑠𝑑𝑡,
igualando este resultado con la parte derecha de la ecuación 4.9 resulta:
𝑑𝑄
𝑑𝑡−∬𝑝
𝜌
𝜌(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑆𝐶
−𝑑𝑊𝑠𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶
+∬𝑒𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
,
𝑑𝑄
𝑑𝑡−𝑑𝑊𝑠𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶
+∬𝑒𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
+∬𝑝𝜌
𝜌(�⃗� ∙ �⃗⃗�)𝑑𝐴
𝑆𝐶
,
luego,
𝑑𝑄
𝑑𝑡−𝑑𝑊𝑠𝑑𝑡
=∭𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶
+∬(𝑝
𝜌+ 𝑒)𝜌(�⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
.
(4.12)
Las ecuaciones de la conservación de la energía se las ha resumido de los siguientes
textos: ([6] págs. 203-205; [7] págs. 202-206; [10] págs.126-227).
A continuación resumimos la ecuación de Bernoulli del siguiente texto [7] págs.
185-188).
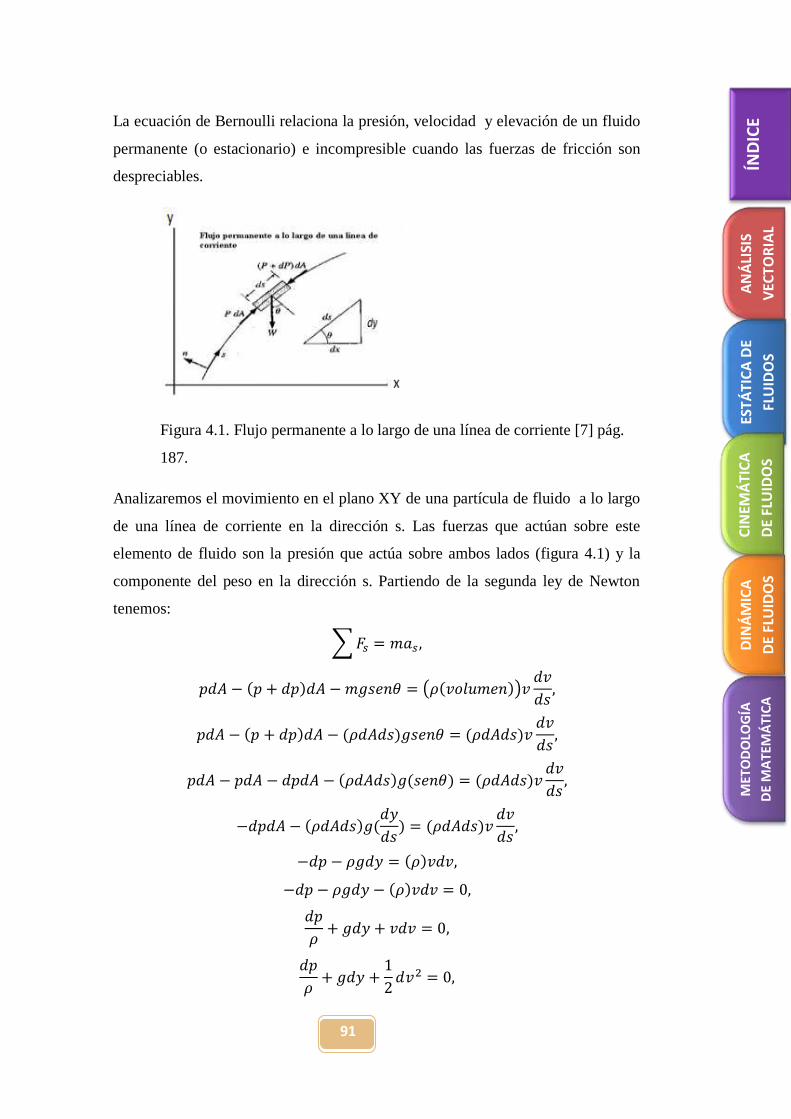
91
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La ecuación de Bernoulli relaciona la presión, velocidad y elevación de un fluido
permanente (o estacionario) e incompresible cuando las fuerzas de fricción son
despreciables.
Figura 4.1. Flujo permanente a lo largo de una línea de corriente [7] pág.
187.
Analizaremos el movimiento en el plano XY de una partícula de fluido a lo largo
de una línea de corriente en la dirección s. Las fuerzas que actúan sobre este
elemento de fluido son la presión que actúa sobre ambos lados (figura 4.1) y la
componente del peso en la dirección s. Partiendo de la segunda ley de Newton
tenemos:
∑𝐹𝑠 = 𝑚𝑎𝑠 ,
𝑝𝑑𝐴 − (𝑝 + 𝑑𝑝)𝑑𝐴 −𝑚𝑔𝑠𝑒𝑛𝜃 = (𝜌(𝑣𝑜𝑙𝑢𝑚𝑒𝑛))𝑣𝑑𝑣
𝑑𝑠,
𝑝𝑑𝐴 − (𝑝 + 𝑑𝑝)𝑑𝐴 − (𝜌𝑑𝐴𝑑𝑠)𝑔𝑠𝑒𝑛𝜃 = (𝜌𝑑𝐴𝑑𝑠)𝑣𝑑𝑣
𝑑𝑠,
𝑝𝑑𝐴 − 𝑝𝑑𝐴 − 𝑑𝑝𝑑𝐴 − (𝜌𝑑𝐴𝑑𝑠)𝑔(𝑠𝑒𝑛𝜃) = (𝜌𝑑𝐴𝑑𝑠)𝑣𝑑𝑣
𝑑𝑠,
−𝑑𝑝𝑑𝐴 − (𝜌𝑑𝐴𝑑𝑠)𝑔(𝑑𝑦
𝑑𝑠) = (𝜌𝑑𝐴𝑑𝑠)𝑣
𝑑𝑣
𝑑𝑠,
−𝑑𝑝 − 𝜌𝑔𝑑𝑦 = (𝜌)𝑣𝑑𝑣,
−𝑑𝑝 − 𝜌𝑔𝑑𝑦 − (𝜌)𝑣𝑑𝑣 = 0,
𝑑𝑝
𝜌+ 𝑔𝑑𝑦 + 𝑣𝑑𝑣 = 0,
𝑑𝑝
𝜌+ 𝑔𝑑𝑦 +
1
2𝑑𝑣2 = 0,

92
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E integrando la última ecuación tenemos:
∫𝑑𝑝
𝜌+ 𝑔∫𝑑𝑦 +
1
2∫𝑑𝑣2 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒,
∫𝑑𝑝
𝜌+1
2𝑣2 + 𝑔𝑦 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒.
(4.13)
Esta es la ecuación de Bernoulli para un flujo permanente, luego, si el flujo es
además incompresible (𝜌=constante) se tiene:
𝑝
𝜌+1
2𝑣2 + 𝑔𝑦 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒.
(4.14)
En términos de energía, la ecuación de Bernoulli indica que en un flujo permanente,
la suma de la energía de flujo (𝑝
𝜌), la energía cinética (
1
2𝑣2) y la energía potencial
(𝑔𝑦) de una partícula de flujo es constante a lo largo de una línea de corriente.
El valor de la constante se puede calcular en cualquier punto de la línea de corriente,
si se conocen la presión, densidad, velocidad y elevación, luego, entre dos puntos
se tiene la siguiente ecuación:
𝑝1𝜌+1
2𝑣12 + 𝑔𝑦1 =
𝑝2𝜌+1
2𝑣22 + 𝑔𝑦2.
(4.15)
4.3.- Algunas aplicaciones de la ecuación de Bernoulli.
Minería
La minería hidráulica se desarrollo en Estados Unidos debido al descubrimiento de
que la energía del agua podía ser enorme. Al tener acceso a fuentes de agua muy
elevadas Los mineros construían tuberías de madera y conectaban boquillas a sus
extremos, creando mangueras que podían lanzar agua a altas velocidades hacia las
laderas, las cuales se desintegraban dejando el oro al descubierto.
93
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El principio científico para extraer oro fue establecido por el matemático suizo
Daniel Bernoulli en 1738. Bernoulli descubrió que si se hace pasar una cantidad de
de agua a través de una pequeña abertura como una boquilla, la presión que se
genera detrás de ésta abertura aumentará la velocidad del agua creando un chorro
a propulsión.
Aeronáutica
El principio de Bernoulli postula que la suma de la energía potencial más la cinética
de un fluido es constante, lo que conduce a obtener la ecuación
𝑝 +1
2𝜌𝑣2 = 𝑘,
lo que indica que cuando la rapidez de un fluido aumenta, su presión disminuye .
Gracias a la forma de los perfiles aerodinámicos, el ala es curva en su cara superior
y está angulada respecto a las líneas de corriente incidentes. El fluido que circula
por arriba recorre más distancia que el de abajo en el mismo tiempo: tiene mayor
velocidad por lo tanto menor presión. Hay una fuerza neta hacia arriba: la
sustentación
Automóviles
En el auto de formula 1 el perfil del ala es invertido. El fluido inferior circula más
rápido. El superior más lento. Hay una fuerza neta hacia abajo.
En un carburador de automóvil, la presión del aire que pasa a través del cuerpo del
carburador, disminuye cuando pasa por un estrangulamiento. Al disminuir la
presión, la gasolina fluye, se vaporiza y se mezcla con la corriente.

94
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Chimeneas
Las chimeneas son altas para aprovechar que la velocidad del viento es más
constante y elevada a mayores alturas.
Agua rociada en el aire
Si fluye agua de una manguera conectada a una tubería principal que está a 400kPa
de presión manométrica. Un niño coloca su dedo pulgar para cubrir la mayor parte
de la salida de la manguera, haciendo que salga un chorro delgado de agua a alta
velocidad y hacia arriba. ¿A qué altura máxima podría llegar el chorro?
Solución: Tomamos dos puntos de referencia, el primero a la salida del chorro de
agua y el segundo el nivel más alto al cual llega el agua. De esta forma se tiene la
ecuación de Bernoulli como sigue:
𝑝1
𝜌+1
2𝑣12 + 𝑔𝑦1 =
𝑝2
𝜌+1
2𝑣22 + 𝑔𝑦2
donde:
𝑝1 es la presión absoluta en el punto 1 y 𝑝2 = 𝑝𝑎𝑡𝑚 es la presión atmosférica,
𝜌 = 1000𝑘𝑔
𝑚3 es la densidad del agua,
𝑣1 ≅ 0 es el valor de la velocidad dentro de la manguera y 𝑣2 = 0,
𝑦1 = 0 y 𝑦2 es la incógnita, representa la altura.
Reemplazando tenemos:
𝑝1
𝜌+ 0 + 0 =
𝑝2
𝜌+ 0 + 𝑔𝑦2,
𝑦2 =𝑝1 − 𝑝𝑎𝑡𝑚𝜌𝑔
=𝑝𝑚𝑎𝑛𝜌𝑔
=400𝑘𝑃𝑎
1000𝑘𝑔𝑚3(9,8
𝑚𝑠2)= 40,8 𝑚.
Ejercicio tomado de [7]pág. 194-195.

95
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Cálculo de la velocidad de flujo que sale de un tanque
En el tanque representado en la figura entra flujo por la parte superior, y sale por
un conducto en la parte de abajo, determinar la velocidad de flujo que sale del
tanque.
Solución
Se tiene un flujo permanente, incompresible, con fuerzas de fricción despreciables,
aplicamos la ecuación de Bernoulli para este caso:
𝑝1𝜌+1
2𝑣12 + 𝑔𝑦1 =
𝑝2𝜌+1
2𝑣22 + 𝑔𝑦2.
Se tiene los siguientes valores 𝑣1 = 0, 𝑦2 = 0 , 𝑝1 = 𝑝2 = 𝑝𝑎𝑡𝑚, así reemplazando
en la ecuación de Bernoulli resulta:
𝑝𝑎𝑡𝑚
𝜌+ 0 + 𝑔𝑦1 =
𝑝𝑎𝑡𝑚
𝜌+1
2𝑣22 + 0 ,
de donde se obtiene la velocidad de salida del fluido:
𝑣 = √2𝑔𝑦1.
4.4.- Ecuación de Navier-Stokes.
A continuación se deducen las ecuaciones de Navier-Stokes, tomadas del texto: ([8]
págs. 157- 163), el mismo que se menciona en la bibliografía.
Las ecuaciones de Navier-Stokes son las expresiones diferenciales de la segunda
ley de Newton del movimiento correspondientes a un fluido newtoniano, tanto para
fluidos compresibles como para incompresibles.
96
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La segunda ley de newton correspondiente a un volumen de control establece que
“la suma de las fuerzas externas que actúan sobre el volumen de control es igual a
la rapidez neta de flujo de momento, hacia afuera del volumen de control más la
rapidez de cambio de momento dentro del volumen de control”; en la forma integral
se tiene.
∑𝐹 =∭𝜕
𝜕𝑡𝜌�⃗�𝑑𝑉
𝑉𝐶
+∬𝜌�⃗�( �⃗� ∙ �⃗⃗�) 𝑑𝐴
𝑆𝐶
.
(4.16)
Para hallar las formas diferenciales de esta última ecuación supondremos un
volumen de control en forma cúbica como indica la figura 4.2, dividiendo la
ecuación 4.16 entre el volumen de control Δ𝑥Δ𝑦Δ𝑧 y llevando al límite cuando sus
dimensiones tienden a cero Δ𝑥Δ𝑦Δ𝑧 → 0 se tiene:
lim∆𝑥∆𝑦∆𝑧→0
∑𝐹
∆𝑥∆𝑦∆𝑧= lim∆𝑥∆𝑦∆𝑧→0
∭𝜕𝜕𝑡 𝜌𝑣𝑑𝑉𝑉𝐶
∆𝑥∆𝑦∆𝑧+ lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌𝑣( 𝑣 ∙ �⃗⃗�)𝑑𝐴𝑆𝐶
∆𝑥∆𝑦∆𝑧.
(4.17)
Figura 4.2 Algunos esfuerzos normales y de deformación en la dirección del
eje x.
Resolviendo el miembro izquierdo de la ecuación 4.17 se obtiene la suma de límites:
lim∆𝑥∆𝑦∆𝑧→0
Σ𝐹
∆𝑥∆𝑦∆𝑧= lim∆𝑥∆𝑦∆𝑧→0
ΣFx∆𝑥∆𝑦∆𝑧
+ lim∆𝑥∆𝑦∆𝑧→0
Σ𝐹𝑦
∆𝑥∆𝑦∆𝑧+ lim∆𝑥∆𝑦∆𝑧→0
ΣFz∆𝑥∆𝑦∆𝑧
.
Para hallar lim∆𝑥∆𝑦∆𝑧→0
ΣFx
∆𝑥∆𝑦∆𝑧 consideramos además de la fuerza gravitatoria, las
fuerzas que actúan en la dirección x, que se deben a los esfuerzos normales y
cortantes (figura 4.2), luego:
𝜏𝑦𝑥|𝑦+∆𝑦
𝑧
𝑥
𝜏𝑧𝑥|𝑧+Δ𝑧
𝜏𝑦𝑥|𝑦
𝜎𝑥𝑥|𝑥 𝜎𝑥𝑥|𝑥+∆𝑥
𝜏𝑧𝑥|𝑧
𝑦
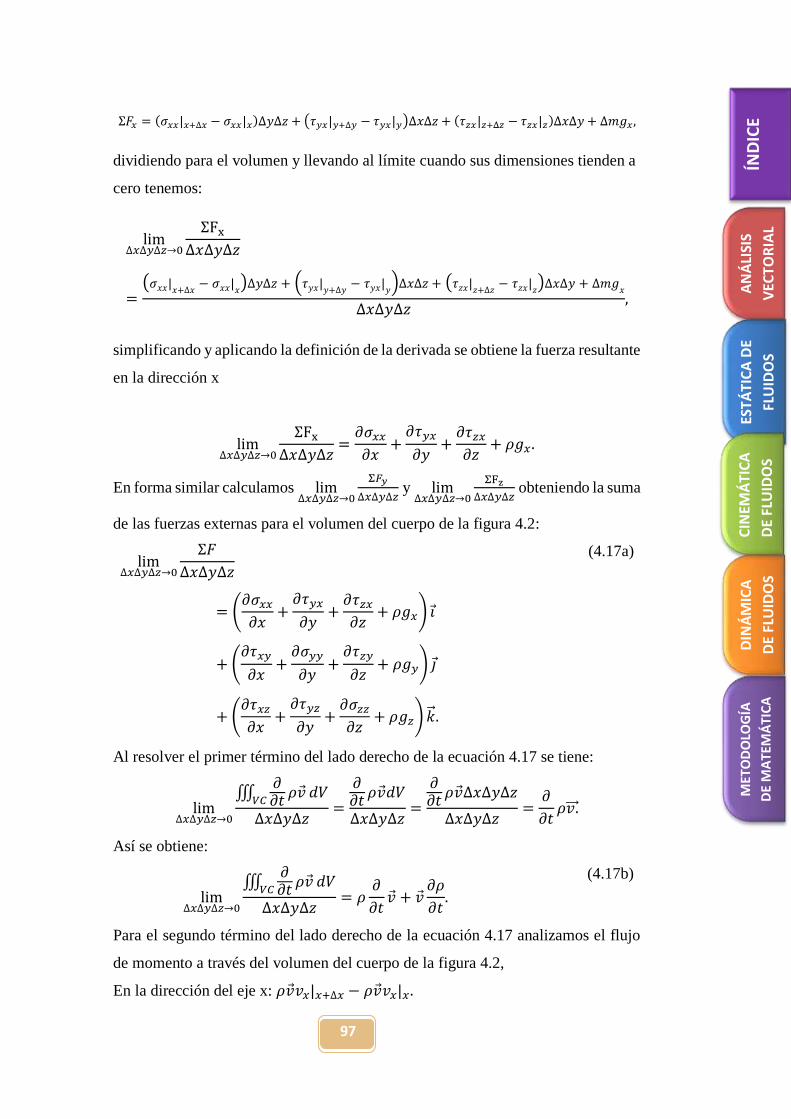
97
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Σ𝐹𝑥 = (𝜎𝑥𝑥|𝑥+∆𝑥 − 𝜎𝑥𝑥|𝑥)Δ𝑦Δ𝑧 + (𝜏𝑦𝑥|𝑦+∆𝑦 − 𝜏𝑦𝑥|𝑦)Δ𝑥Δ𝑧 + (𝜏𝑧𝑥|𝑧+Δ𝑧 − 𝜏𝑧𝑥|𝑧)Δ𝑥Δ𝑦 + Δ𝑚𝑔𝑥 ,
dividiendo para el volumen y llevando al límite cuando sus dimensiones tienden a
cero tenemos:
lim∆𝑥∆𝑦∆𝑧→0
ΣFx∆𝑥∆𝑦∆𝑧
=(𝜎𝑥𝑥|𝑥+∆𝑥 − 𝜎𝑥𝑥|𝑥)Δ𝑦Δ𝑧 + (𝜏𝑦𝑥|𝑦+∆𝑦 − 𝜏𝑦𝑥|𝑦)Δ𝑥Δ𝑧 + (𝜏𝑧𝑥|𝑧+Δ𝑧 − 𝜏𝑧𝑥|𝑧)Δ𝑥Δ𝑦 + Δ𝑚𝑔𝑥
∆𝑥∆𝑦∆𝑧,
simplificando y aplicando la definición de la derivada se obtiene la fuerza resultante
en la dirección x
lim∆𝑥∆𝑦∆𝑧→0
ΣFx∆𝑥∆𝑦∆𝑧
=𝜕𝜎𝑥𝑥𝜕𝑥
+𝜕𝜏𝑦𝑥
𝜕𝑦+𝜕𝜏𝑧𝑥𝜕𝑧
+ 𝜌𝑔𝑥.
En forma similar calculamos lim∆𝑥∆𝑦∆𝑧→0
Σ𝐹𝑦
∆𝑥∆𝑦∆𝑧 y lim∆𝑥∆𝑦∆𝑧→0
ΣFz
∆𝑥∆𝑦∆𝑧 obteniendo la suma
de las fuerzas externas para el volumen del cuerpo de la figura 4.2:
lim∆𝑥∆𝑦∆𝑧→0
Σ𝐹
∆𝑥∆𝑦∆𝑧
= (𝜕𝜎𝑥𝑥𝜕𝑥
+𝜕𝜏𝑦𝑥
𝜕𝑦+𝜕𝜏𝑧𝑥𝜕𝑧
+ 𝜌𝑔𝑥) 𝑖
+ (𝜕𝜏𝑥𝑦
𝜕𝑥+𝜕𝜎𝑦𝑦
𝜕𝑦+𝜕𝜏𝑧𝑦
𝜕𝑧+ 𝜌𝑔𝑦) 𝑗
+ (𝜕𝜏𝑥𝑧𝜕𝑥
+𝜕𝜏𝑦𝑧
𝜕𝑦+𝜕𝜎𝑧𝑧𝜕𝑧
+ 𝜌𝑔𝑧) �⃗⃗�.
(4.17a)
Al resolver el primer término del lado derecho de la ecuación 4.17 se tiene:
lim∆𝑥∆𝑦∆𝑧→0
∭𝜕𝜕𝑡𝜌�⃗�
𝑉𝐶𝑑𝑉
∆𝑥∆𝑦∆𝑧=
𝜕𝜕𝑡𝜌�⃗�𝑑𝑉
∆𝑥∆𝑦∆𝑧=
𝜕𝜕𝑡𝜌�⃗�∆𝑥∆𝑦∆𝑧
∆𝑥∆𝑦∆𝑧=𝜕
𝜕𝑡𝜌𝑣.⃗⃗⃗ ⃗
Así se obtiene:
lim∆𝑥∆𝑦∆𝑧→0
∭𝜕𝜕𝑡𝜌�⃗�
𝑉𝐶𝑑𝑉
∆𝑥∆𝑦∆𝑧= 𝜌
𝜕
𝜕𝑡�⃗� + �⃗�
𝜕𝜌
𝜕𝑡.
(4.17b)
Para el segundo término del lado derecho de la ecuación 4.17 analizamos el flujo
de momento a través del volumen del cuerpo de la figura 4.2,
En la dirección del eje x: 𝜌�⃗�𝑣𝑥|𝑥+∆𝑥 − 𝜌�⃗�𝑣𝑥|𝑥.

98
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E En la dirección del eje y: 𝜌�⃗�𝑣𝑦|𝑦+∆𝑦 − 𝜌�⃗�𝑣𝑦|𝑦 .
En la dirección del eje z: 𝜌�⃗�𝑣𝑧|𝑧+∆𝑧 − 𝜌�⃗�𝑣𝑧|𝑧.
Luego:
lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑆𝐶
𝑑𝐴
∆𝑥∆𝑦∆𝑧= lim∆𝑥∆𝑦∆𝑧→0
(𝜌�⃗�𝑣𝑥|𝑥+∆𝑥 − 𝜌�⃗�𝑣𝑥|𝑥)∆𝑦∆𝑧
∆𝑥∆𝑦∆𝑧
+ lim∆𝑥∆𝑦∆𝑧→0
(𝜌�⃗�𝑣𝑦|𝑦+∆𝑦 − 𝜌�⃗�𝑣𝑦|𝑦)∆𝑥∆𝑧
∆𝑥∆𝑦∆𝑧
+ lim∆𝑥∆𝑦∆𝑧→0
(𝜌�⃗�𝑣𝑧|𝑧+∆𝑧 − 𝜌�⃗�𝑣𝑧|𝑧)∆𝑥∆𝑦
∆𝑥∆𝑦∆𝑧,
aplicando la definición de derivada se tiene:
lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑑𝐴𝑆𝐶
∆𝑥∆𝑦∆𝑧=𝜕
𝜕𝑥(𝜌�⃗�𝑣𝑥)+
𝜕
𝜕𝑦(𝜌�⃗�𝑣𝑦)+
𝜕
𝜕𝑧(𝜌�⃗�𝑣𝑧),
calculando las derivadas parciales:
lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑆𝐶
𝑑𝐴
∆𝑥∆𝑦∆𝑧= (�⃗�
𝜕
𝜕𝑥(𝜌𝑣𝑥)+ (𝜌𝑣𝑥)
𝜕
𝜕𝑥�⃗�)
+ (�⃗�𝜕
𝜕𝑦(𝜌𝑣𝑦)+ (𝜌𝑣𝑦)
𝜕
𝜕𝑦�⃗�)+ (�⃗�
𝜕
𝜕𝑦(𝜌𝑣𝑦)+ (𝜌𝑣𝑧)
𝜕
𝜕𝑧�⃗�),
agrupando convenientemente se obtiene:
lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑑𝐴𝑆𝐶
∆𝑥∆𝑦∆𝑧= �⃗� [
𝜕
𝜕𝑥(𝜌𝑣𝑥)+
𝜕
𝜕𝑦(𝜌𝑣𝑦)+
𝜕
𝜕𝑧(𝜌𝑣𝑧)]
+ 𝜌 [𝑣𝑥𝜕
𝜕𝑥�⃗� + 𝑣𝑦
𝜕
𝜕𝑦�⃗� + 𝑣𝑧
𝜕
𝜕𝑧�⃗�],
mediante la forma diferencial de la ecuación de la continuidad (que se indica màs
adelante) se llega al siguiente resultado:
lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑆𝐶
𝑑𝐴
∆𝑥∆𝑦∆𝑧
= −�⃗�𝜕𝜌
𝜕𝑡+ 𝜌 [𝑣𝑥
𝜕
𝜕𝑥�⃗� + 𝑣𝑦
𝜕
𝜕𝑦�⃗� + 𝑣𝑧
𝜕
𝜕𝑧�⃗�].
(4.17c)
Forma diferencial de la ecuación de la continuidad:
𝜕
𝜕𝑥(𝜌𝑣𝑥) +
𝜕
𝜕𝑦(𝜌𝑣𝑦) +
𝜕
𝜕𝑧(𝜌𝑣𝑧) +
𝜕𝜌
𝜕𝑡= 0.
99
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La deducción de ésta ecuación se encuentra en [6] pág238.
Sumando las ecuaciones 4.17b y 4.17c
lim∆𝑥∆𝑦∆𝑧→0
∭𝜕𝜕𝑡𝜌�⃗�
𝑉𝐶𝑑𝑉
∆𝑥∆𝑦∆𝑧+ lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗⃗�(�⃗⃗� ∙ �⃗⃗�)𝑆𝐶
𝑑𝐴
∆𝑥∆𝑦∆𝑧
= 𝜌𝜕
𝜕𝑡�⃗� + �⃗�
𝜕𝜌
𝜕𝑡− �⃗⃗�
𝜕𝜌
𝜕𝑡+ 𝜌 [𝑣𝑥
𝜕
𝜕𝑥�⃗⃗� + 𝑣𝑦
𝜕
𝜕𝑦�⃗⃗� + 𝑣𝑧
𝜕
𝜕𝑧�⃗⃗�],
de donde se obtiene:
lim∆𝑥∆𝑦∆𝑧→0
∭𝜕
𝜕𝑡𝜌�⃗⃗�
𝑉𝐶𝑑𝑉
∆𝑥∆𝑦∆𝑧+ lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗⃗�(�⃗⃗�∙�⃗⃗�)𝑆𝐶
𝑑𝐴
∆𝑥∆𝑦∆𝑧= 𝜌 [
𝜕�⃗⃗�
𝜕𝑡+ 𝑣𝑥
𝜕�⃗⃗�
𝜕𝑥+ 𝑣𝑦
𝜕�⃗⃗�
𝜕𝑦+ 𝑣𝑧
𝜕�⃗⃗�
𝜕𝑧].
Expresando este resultado mediante componentes vectoriales tenemos:
lim∆𝑥∆𝑦∆𝑧→0
∭𝜕𝜕𝑡𝜌�⃗�
𝑉𝐶𝑑𝑉
∆𝑥∆𝑦∆𝑧+ lim∆𝑥∆𝑦∆𝑧→0
∬ 𝜌�⃗�(�⃗� ∙ �⃗⃗�)𝑑𝐴𝑆𝐶
∆𝑥∆𝑦∆𝑧
= 𝜌 (𝜕𝑣𝑥𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑥𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑥𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑥𝜕𝑧) 𝑖
+ 𝜌 (𝜕𝑣𝑦
𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑦
𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑦
𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑦
𝜕𝑧) 𝑗
+ 𝜌 (𝜕𝑣𝑧𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑧𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑧𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑧𝜕𝑧) �⃗⃗�
(4.17d)
Reemplazando las ecuaciones 4.17a y 4.17d en la ecuación 4.17 tenemos:
(𝜕𝜎𝑥𝑥𝜕𝑥
+𝜕𝜏𝑦𝑥
𝜕𝑦+𝜕𝜏𝑧𝑥𝜕𝑧
+ 𝜌𝑔𝑥) 𝑖 + (𝜕𝜏𝑥𝑦
𝜕𝑥+𝜕𝜎𝑦𝑦
𝜕𝑦+𝜕𝜏𝑧𝑦
𝜕𝑧+ 𝜌𝑔𝑦) 𝑗
+ (𝜕𝜏𝑥𝑧𝜕𝑥
+𝜕𝜏𝑦𝑧
𝜕𝑦+𝜕𝜎𝑧𝑧𝜕𝑧
+ 𝜌𝑔𝑧) �⃗⃗�
= 𝜌 (𝜕𝑣𝑥𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑥𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑥𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑥𝜕𝑧) 𝑖
+ 𝜌(𝜕𝑣𝑦
𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑦
𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑦
𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑧𝜕𝑧) 𝑗
+ 𝜌 (𝜕𝑣𝑧𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑧𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑧𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑧𝜕𝑧) �⃗⃗�,
aplicando las propiedades de igualdad de vectores obtienen las tres igualdades
siguientes

100
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝜌 (𝜕𝑣𝑥𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑥𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑥𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑥𝜕𝑧) =
𝜕𝜎𝑥𝑥𝜕𝑥
+𝜕𝜏𝑦𝑥
𝜕𝑦+𝜕𝜏𝑧𝑥𝜕𝑧
+ 𝜌𝑔𝑥,
(4.18a)
𝜌(𝜕𝑣𝑦
𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑦
𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑦
𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑧𝜕𝑧) =
𝜕𝜏𝑥𝑦
𝜕𝑥+𝜕𝜎𝑦𝑦
𝜕𝑦+𝜕𝜏𝑧𝑦
𝜕𝑧+ 𝜌𝑔𝑦,
(4.18b)
𝜌 (𝜕𝑣𝑧𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑧𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑧𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑧𝜕𝑧) =
𝜕𝜏𝑥𝑧𝜕𝑥
+𝜕𝜏𝑦𝑧
𝜕𝑦+𝜕𝜎𝑧𝑧𝜕𝑧
+ 𝜌𝑔𝑧,
(4.18c)
Aplicando la definición de la derivada sustancial:
𝐷𝑣𝑥𝐷𝑡
=𝜕𝑣𝑥𝜕𝑡+ 𝑣𝑥
𝜕𝑣𝑥𝜕𝑥+ 𝑣𝑦
𝜕𝑣𝑥𝜕𝑦+ 𝑣𝑧
𝜕𝑣𝑥𝜕𝑧
en las ecuaciones 4.18 resultan las siguientes ecuaciones:
𝜌𝐷𝑣𝑥𝐷𝑡
=𝜕𝜎𝑥𝑥𝜕𝑥
+𝜕𝜏𝑦𝑥
𝜕𝑦+𝜕𝜏𝑧𝑥𝜕𝑧
+ 𝜌𝑔𝑥, (4.19a)
𝜌𝐷𝑣𝑥𝐷𝑡
=𝜕𝜏𝑥𝑦
𝜕𝑥+𝜕𝜎𝑦𝑦
𝜕𝑦+𝜕𝜏𝑧𝑦
𝜕𝑧+ 𝜌𝑔𝑦,
(4.19b)
𝜌𝐷𝑣𝑥𝐷𝑡
=𝜕𝜏𝑥𝑧𝜕𝑥
+𝜕𝜏𝑦𝑧
𝜕𝑦+𝜕𝜎𝑧𝑧𝜕𝑧
+ 𝜌𝑔𝑧. (4.19c)
Reemplazando los esfuerzos normales y de deformación por las relaciones de
Stokes para la viscosidad (tabla4.1), calculando las derivadas, simplificando
convenientemente al utilizar las propiedades y definiciones vectoriales , las
ecuaciones 4.19 se transforman en las ecuaciones de Navier-Stokes para un fluido
newtoniano, tanto para fluidos compresibles como para incompresibles :
𝜌𝐷𝑣𝑥𝐷𝑡
= −𝜕𝑝
𝜕𝑥−𝜕
𝜕𝑥(2
3𝜇∇ ∙ �⃗�) + ∇ ∙ (𝜇
𝜕�⃗�
𝜕𝑥) + ∇ ∙ (𝜇∇𝑣𝑥) + 𝜌𝑔𝑥,
(4.20a)
𝜌𝐷𝑣𝑦
𝐷𝑡= −
𝜕𝑝
𝜕𝑦−𝜕
𝜕𝑦(2
3𝜇∇ ∙ �⃗�) + ∇ ∙ (𝜇
𝜕�⃗�
𝜕𝑦) + ∇ ∙ (𝜇∇𝑣𝑦) + 𝜌𝑔𝑦 ,
(4.20b)
𝜌𝐷𝑣𝑧𝐷𝑡
= −𝜕𝑝
𝜕𝑧−𝜕
𝜕𝑧(2
3𝜇∇ ∙ �⃗�) + ∇ ∙ (𝜇
𝜕�⃗�
𝜕𝑧) + ∇ ∙ (𝜇∇𝑣𝑧) + 𝜌𝑔𝑧.
(4.20c)

101
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Tabla 4.1 Relaciones de Stokes para la viscosidad:
𝜏𝑥𝑦 = 𝜏𝑦𝑥 = 𝜇 (𝜕𝑣𝑥𝜕𝑦+𝜕𝑣𝑦
𝜕𝑥)
𝜏𝑦𝑧 = 𝜏𝑧𝑦 = 𝜇 (𝜕𝑣𝑦
𝜕𝑧+𝜕𝑣𝑧𝜕𝑦)
𝜏𝑥𝑧 = 𝜏𝑧𝑥 = 𝜇 (𝜕𝑣𝑧𝜕𝑥+𝜕𝑣𝑥𝜕𝑧)
𝜎𝑥𝑥 = 𝜇 (2𝜕𝑣𝑥𝜕𝑥−2
3∇ ∙ �⃗�) − 𝑝
𝜎𝑦𝑦 = 𝜇 (2𝜕𝑣𝑦
𝜕𝑦−2
3∇ ∙ �⃗�) − 𝑝
𝜎𝑧𝑧 = 𝜇 (2𝜕𝑣𝑧𝜕𝑧−2
3∇ ∙ �⃗�) − 𝑝
Las relaciones de Stokes para la viscosidad se encuentran en [8] pág. 139
Cuando un flujo de fluido es incompresible, el producto escalar ∇ ∙ �⃗� = 0, además
se puede probar que el producto escalar ∇ ∙ (𝜇𝜕�⃗⃗�
𝜕𝑥) = 𝜇
𝜕
𝜕𝑥(∇ ∙ �⃗�) , entonces las
ecuaciones de Navier-Stokes para un flujo incompresible resultan:
𝜌𝐷𝑣𝑥𝐷𝑡
= −𝜕𝑝
𝜕𝑥+ ∇ ∙ (𝜇∇𝑣𝑥) + 𝜌𝑔𝑥,
(4.21a)
𝜌𝐷𝑣𝑦
𝐷𝑡= −
𝜕𝑝
𝜕𝑦− +∇ ∙ (𝜇∇𝑣𝑦) + 𝜌𝑔𝑦,
(4.21b)
𝜌𝐷𝑣𝑧𝐷𝑡
= −𝜕𝑝
𝜕𝑧+ ∇ ∙ (𝜇∇𝑣𝑧) + 𝜌𝑔𝑧.
(4.21c)
Aplicando las definiciones del algebra vectorial en la ecuación 4.21a tenemos el
siguiente resultado:
∇ ∙ (𝜇∇𝑣𝑥) = (𝜕
𝜕𝑥,𝜕
𝜕𝑦,𝜕
𝜕𝑧) ∙ 𝜇 (
𝜕𝑣𝑥
𝜕𝑥,𝜕𝑣𝑥
𝜕𝑦,𝜕𝑣𝑥
𝜕𝑧) = 𝜇 (
𝜕
𝜕𝑥
𝜕𝑣𝑥
𝜕𝑥+
𝜕
𝜕𝑦
𝜕𝑣𝑥
𝜕𝑦+𝜕
𝜕𝑧
𝜕𝑣𝑥
𝜕𝑧) =
𝜇(𝜕2𝑣𝑥
𝜕𝑥2 +
𝜕2𝑣𝑥
𝜕𝑦2 +
𝜕2𝑣𝑥
𝜕𝑧2 ),
luego, mediante un procedimiento similar para las ecuaciones 4.21b y 4.21c se
tiene:
𝜌𝐷𝑣𝑥𝐷𝑡
= −𝜕𝑝
𝜕𝑥+ 𝜇 (
𝜕2𝑣𝑥
𝜕𝑥2 +
𝜕2𝑣𝑥
𝜕𝑦2 +
𝜕2𝑣𝑥
𝜕𝑧2 ) + 𝜌𝑔𝑥,
(4.22a)
𝜌𝐷𝑣𝑦
𝐷𝑡= −
𝜕𝑝
𝜕𝑦+ 𝜇 (
𝜕2𝑣𝑦
𝜕𝑥2 +
𝜕2𝑣𝑦
𝜕𝑦2 +
𝜕2𝑣𝑦
𝜕𝑧2 ) + 𝜌𝑔𝑦,
(4.22b)
𝜌𝐷𝑣𝑧𝐷𝑡
= −𝜕𝑝
𝜕𝑧+ 𝜇 (
𝜕2𝑣𝑧
𝜕𝑥2 +
𝜕2𝑣𝑧
𝜕𝑦2 +
𝜕2𝑣𝑧
𝜕𝑧2 ) + 𝜌𝑔𝑧,
(4.22c)
102
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Por último expresamos las ecuaciones 4.22 como un solo vector para obtener las
ecuaciones 4.23 y 4.24.
Ecuación de Navier-Stokes para un flujo incompresible de viscosidad constante
𝜌𝐷�⃗�
𝐷𝑡= −∇𝑝 + 𝜇∇2�⃗� + 𝜌�⃗�.
(4.23)
Ecuación de Navier-Stokes para un flujo no viscoso (𝜇 = 0 ) e incompresible
(Ecuación de Euler)
𝜌𝐷�⃗�
𝐷𝑡= −∇𝑝 + 𝜌�⃗�.
(4.24)
4.5.- Algunas aplicaciones en la industria
Turbo máquina simple.- Es un aparato en el cual, el movimiento un fluido no
confinado, se modifica de tal forma que, crea un empuje propulsor sobre el aparato
Figura4.4Turbomáquina
(http://web.educastur.princast.es/proyectos/grupotecne/archivos/investiga/105trbfan.jpg)
Turborreactor.- Es una máquina en la cual se induce a que un fluido experimente
un patrón de flujo que produce empuje. El flujo se mantiene mediante la energía
que se proporciona al quemar combustible
103
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 4.5 Algunos tipos de turborreactores
(http://html.rincondelvago.com/000158360.png).
Un turborreactor está formado por un compresor, una cámara de combustión, una
turbina y una tobera de descarga; el empuje se produce de la siguiente forma:
1. Grandes cantidades de aire ingresan al motor y se comprime.
2. El aire comprimido se mezcla con el combustible.
3. Los gases producidos pasan por una turbina de gas, que mueve el compresor.
4. Se produce la propulsión.
4.6.- Simplificación de algunos modelos.
1. Ecuación de la continuidad en un flujo estacionario y unidimensional:
Considérese un volumen de control con una entrada y una salida de flujo de
masa estacionario y unidimensional como se observa en la figura 4.6
Figura 4.6 Volumen de control con una entrada y una salida de flujo
estacionario y unidimensional

104
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La ecuación de la continuidad para este caso se reduce a la rapidez de flujo de
masa en la superficie de control en las posiciones 1 y 2, así:
∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
=∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝐴1
+∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝐴2
= 0.
En la sección 1, el vector normal a la superficie y la velocidad tienen la misma
dirección pero sentidos opuestos, por lo tanto el producto �⃗� ∙ �⃗⃗� es negativo,
mientras que en la sección 2 es positivo; además �⃗� ∙ �⃗⃗� representa la magnitud
de la velocidad en cada integral, entonces:
∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝐴1
+∬𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝐴2
= −∬𝜌𝑣𝑑𝐴
𝐴1
+∬𝜌𝑣𝑑𝐴
𝐴2
= 0,
integrando las expresiones escalares se tiene:
−∬𝜌𝑣𝑑𝐴
𝐴1
+∬𝜌𝑣𝑑𝐴
𝐴2
= −𝜌1𝑣1𝐴1 + 𝜌2𝑣2𝐴2 = 0,
luego, se obtiene la simplificación para el modelo propuesto:
𝜌1𝑣1𝐴1 = 𝜌2𝑣2𝐴2. (4.25)
El modelo precedente se ha simplificado de [6] págs. 139-140.
2. Conservación de la energía en un flujo permanente, unidimensional con
fricción:
Considérese el volumen de control con una entrada y una salida de un flujo de
fluido estacionario, unidimensional y sin pérdidas debidas a las fuerzas de
fricción como en el caso de la figura 4.7. De la expresión de la energía (ecuación
4.12)
𝑑𝑄
𝑑𝑡−𝑑𝑊𝑠
𝑑𝑡=∭
𝜕
𝜕𝑡𝜌𝑒𝑑𝑉
𝑉𝐶+∬ (
𝑝
𝜌+ 𝑒)𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶;
el primer término del lado derecho es cero debido que en un flujo permanente
la energía almacenada dentro de un volumen de control permanece constante
con el tiempo, luego, la energía total para este caso será:
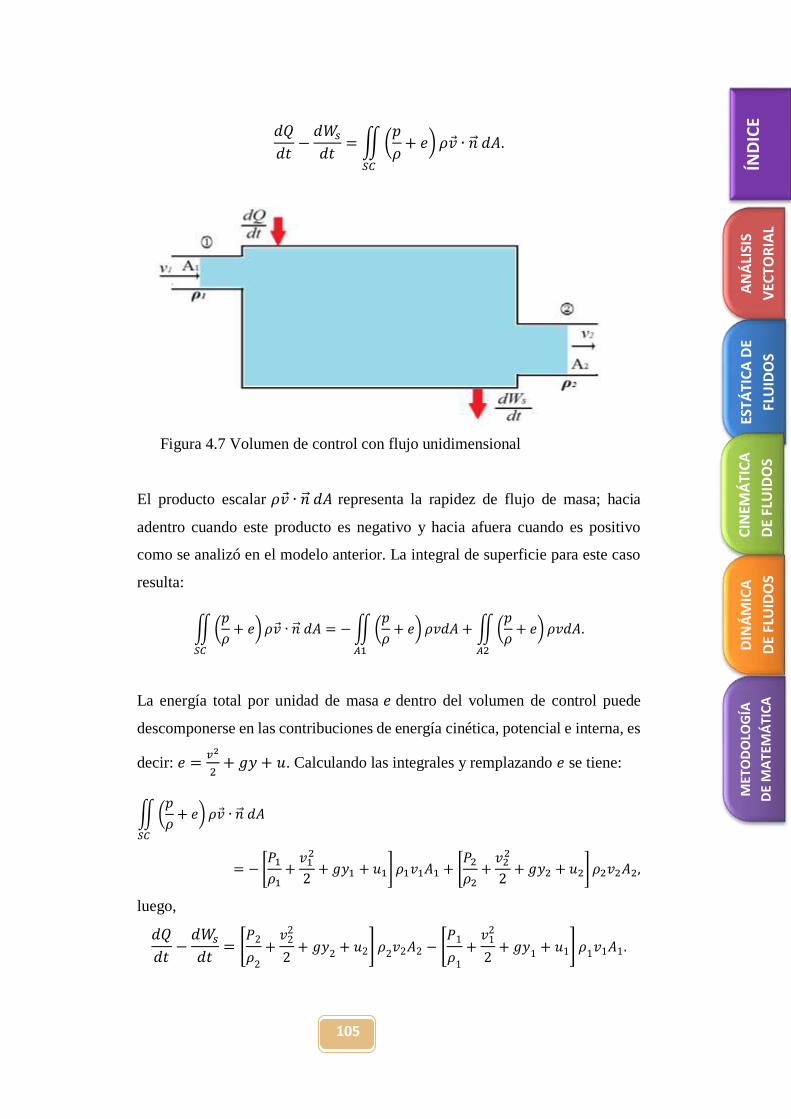
105
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
𝑑𝑄
𝑑𝑡−𝑑𝑊𝑠𝑑𝑡
= ∬(𝑝
𝜌+ 𝑒) 𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
.
Figura 4.7 Volumen de control con flujo unidimensional
El producto escalar 𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴 representa la rapidez de flujo de masa; hacia
adentro cuando este producto es negativo y hacia afuera cuando es positivo
como se analizó en el modelo anterior. La integral de superficie para este caso
resulta:
∬(𝑝
𝜌+ 𝑒)𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
= −∬(𝑝
𝜌+ 𝑒) 𝜌𝑣𝑑𝐴
𝐴1
+∬(𝑝
𝜌+ 𝑒) 𝜌𝑣𝑑𝐴
𝐴2
.
La energía total por unidad de masa 𝑒 dentro del volumen de control puede
descomponerse en las contribuciones de energía cinética, potencial e interna, es
decir: 𝑒 =𝑣2
2+ 𝑔𝑦 + 𝑢. Calculando las integrales y remplazando 𝑒 se tiene:
∬(𝑝
𝜌+ 𝑒) 𝜌�⃗� ∙ �⃗⃗� 𝑑𝐴
𝑆𝐶
= − [𝑃1𝜌1+𝑣12
2+ 𝑔𝑦1 + 𝑢1] 𝜌1𝑣1𝐴1 + [
𝑃2𝜌2+𝑣22
2+ 𝑔𝑦2 + 𝑢2] 𝜌2𝑣2𝐴2,
luego,
𝑑𝑄
𝑑𝑡−𝑑𝑊𝑠𝑑𝑡
= [𝑃2
𝜌2
+𝑣22
2+ 𝑔𝑦
2+ 𝑢2] 𝜌2𝑣2𝐴2 − [
𝑃1
𝜌1
+𝑣12
2+ 𝑔𝑦
1+ 𝑢1] 𝜌1𝑣1𝐴1.

106
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E La suma de la energía interna 𝑢 y el flujo de energía 𝑃
𝜌 forman la propiedad llamada
entalpia, así: ℎ = 𝑢 +𝑃
𝜌. Reemplazando ℎ y reorganizando la ecuación se tiene:
[𝑣12
2+ 𝑔𝑦1 + ℎ1] 𝜌1𝑣1𝐴1 +
𝑑𝑄
𝑑𝑡= [𝑣22
2+ 𝑔𝑦2 + ℎ2] 𝜌2𝑣2𝐴2 +
𝑑𝑊𝑠
𝑑𝑡.
La ecuación de continuidad para el volumen de control establece que la rapidez de flujo
de masa es constante es decir:
𝜌1𝑣1𝐴1 = 𝜌2𝑣2𝐴2 =𝑑𝑚
𝑑𝑡,
dividiendo la ecuación para 𝑑𝑚
𝑑𝑡 se obtiene la ecuación:
[𝑣12
2+ 𝑔𝑦1 + ℎ1] +
𝑑𝑄
𝑑𝑚= [𝑣22
2+ 𝑔𝑦2 + ℎ2] +
𝑑𝑊𝑠
𝑑𝑚,
(4.26)
donde 𝑑𝑄
𝑑𝑚 es el calor neto por unidad de masa y
𝑑𝑊𝑠
𝑑𝑚 es el trabajo neto por unidad
de masa.
La simplificación para éste modelo se ha tomado de [8] págs. 109-110.

107
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E CAPITULO 5
PROPUESTA METODOLÓGICA EN LA ENSEÑANZA DE
MATEMÁTICA
Resumen
En éste capítulo se introducen definiciones importantes que se utilizan en la
metodología de la enseñanza, donde se abordan entre otras cosas los modelos
educativos, los procedimientos, estrategias y técnicas didácticas. A continuación se
tratan ciertos tópicos en la enseñanza de matemática como por ejemplo un análisis
de la problemática en la enseñanza de matemática, así como también algunas
recomendaciones metodológicas, además se toman en cuenta el uso de programas
computacionales y las calculadoras gráficas. Se considera el uso de dos programas
computacionales para la enseñanza de matemática: Matemáticas de Microsoft y
MATLAB.
5.1.- Metodología de la enseñanza.
5.1.1.- Definiciones generales
Las siguientes definiciones y algunos elementos pedagógicos que se presentan, se
encuentran en los documentos pedagógicos elaborados por la Comisión de
Investigación y Experimentación del Colegio Experimental “Simón Bolívar” y se
mencionan el numeral [13] de la bibliografía.
Un modelo educativo es una representación organizada coherentemente por un
cúmulo de intangibles, arreglados en un esquema teórico que funciona como
arquetipo y ejemplar. El modelo brinda la unidad e identidad de todo el sistema,
y se constituye en una guía para los planeadores, directivos, maestros y
alumnos.
En el Modelo de enseñanza histórico cultural, el estudiante aprende contenidos,
conceptos, explicaciones de fenómenos físicos o sociales, procedimientos para
resolver problemas valores y normas de actuación, partiendo de lo cognitivo en
la interacción con la realidad social y natural
108
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E En el modelo de enseñanza tradicional se propende a una escolaridad corta, lo
que induce a adquirir los conocimientos matemáticos a la brevedad posible y
orientada a resolver problemas matemáticos de la vida cotidiana. Su objetivo
es que el estudiante adquiera algunas destrezas y habilidades que le sean útiles.
El profesor imparte los conocimientos, es el emisor, el proporciona y selecciona
los contenidos la evaluación se limita a los contenidos impartidos en forma
mecánica y memorística. El estudiante es el receptor en un rol pasivo, no se
consideran los intereses ni capacidades y el estudiante se limita a aprender de
memoria.
En el Modelo de enseñanza activa se da importancia a la participación del
estudiante, el profesor busca despertar el interés del estudiante y orientar las
actividades y tareas, se planifica, organiza y sistematizan los contenidos, los
cuales se integran por estructuras bien definidas como son la lógica matemática,
la teoría de conjuntos, el sistema de los números reales y la teoría de funciones.
En el Modelo de enseñanza creativa se busca el desarrollo de la personalidad,
de la inteligencia y, en general, el desarrollo integral del alumno mediante
procesos lógicos y de modelación como resultado de la elaboración de
conceptos matemáticos con la realidad.
Los Modelos matemáticos son un conjunto de relaciones matemáticas,
ecuaciones y relaciones lógicas que representan aproximaciones de
interacciones entre los elementos de un sistema dinámico. Estos modelos
describen un intercambio de información entre las variables dependientes e
independientes de diferente naturaleza, así tenemos por ejemplo modelos
económicos, modelos de biomatemática, modelos en mecánica de fluidos, etc.
Los sistemas dinámicos comprenden un conjunto de elementos, objetos o
componentes en interacción dinámica, organizada en función de un objetivo.
Los sistemas pueden ser de diferentes tipos: vivientes como por ejemplo una
colonia de hongos o bacterias, materiales como por ejemplo el sistema de

109
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E transporte de una ciudad, abstractos como un modelo matemático. Los
elementos que componen un sistema son:
- Un límite o fronteras del sistema.
- Los componentes del sistema, los cuales pueden ser enlistados por
categorías.
- Reservorios, fuentes o acumuladores en los cuales se agrupan o almacenan
los elementos del sistema.
Un sistema puede ser influenciado por un aporte de energía, materia o
información, así se tienen las entradas, salidas y perturbaciones del sistema. Las
variables de estado son todas las magnitudes internas, las cuales pueden
evolucionar en el transcurso del tiempo debido al aporte de energía, materia o
información.
El sistema educativo es un sistema dinámico que se ajusta a las definiciones
anteriores y en donde los procesos educativos se organizan, se planifican, se
ejecutan y evalúan de acuerdo a los objetivos y metas propuestos, siguiendo una
metodología apropiada. Por ejemplo en el sistema universitario encontramos
tres tipos de componentes: vivientes (autoridades, profesores, empleados,
estudiantes), materiales (edificios, aulas, laboratorios, etc.) y abstractos (leyes,
reglamentos, planes y programas, métodos de enseñanza, etc.
Competencia es el resultado de la interacción de un conjunto de conocimientos,
habilidades y valores que se manifiestan a través de un desempeño eficiente en
la búsqueda, identificación y solución de problemas, pudiendo incluso resolver
aquellos no determinados.
Metodología es el conjunto de métodos, procedimientos, técnicas y estrategias
didácticas para desarrollar el proceso de inter aprendizaje de manera efectiva y
que cumple con el modelo educativo. En matemática se pueden aplicar los
métodos heurístico, inductivo, deductivo, etc.
Procedimientos didácticos son las de acciones sistemáticas que indican la
técnica o el método para alcanzar los objetivos planteados, constituyen los pasos
a seguir para implementar el método y se deben considerar en un proceso de
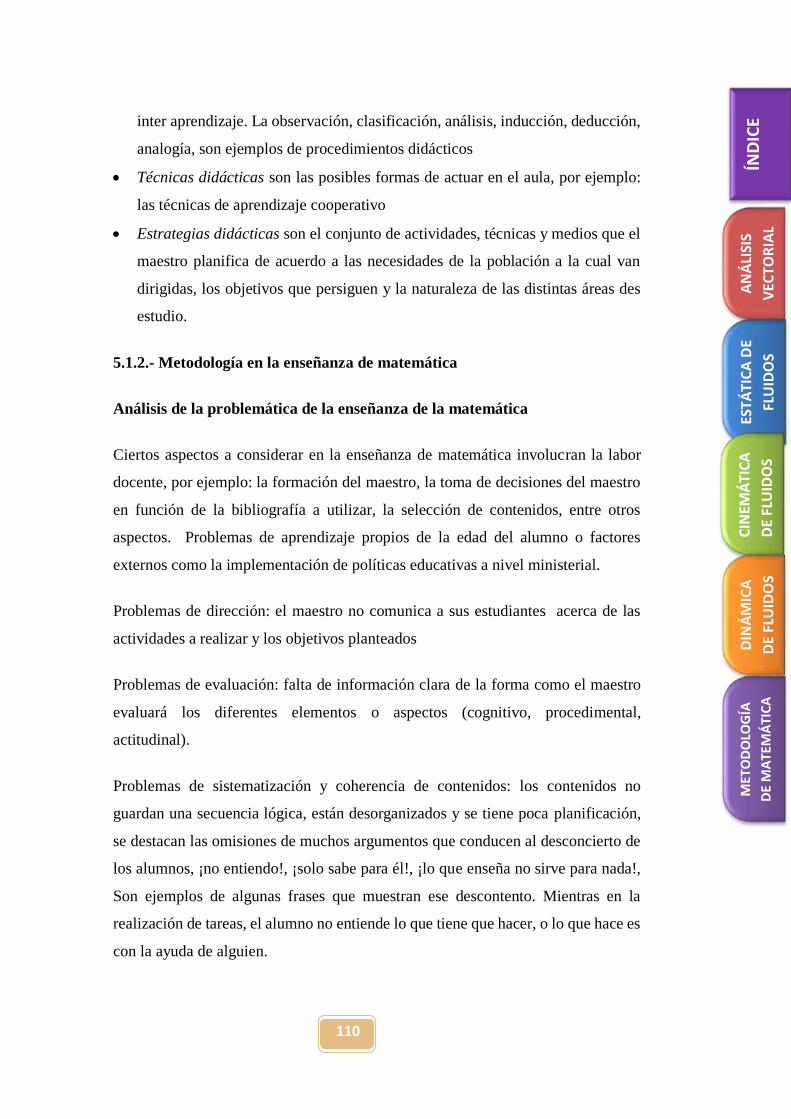
110
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E inter aprendizaje. La observación, clasificación, análisis, inducción, deducción,
analogía, son ejemplos de procedimientos didácticos
Técnicas didácticas son las posibles formas de actuar en el aula, por ejemplo:
las técnicas de aprendizaje cooperativo
Estrategias didácticas son el conjunto de actividades, técnicas y medios que el
maestro planifica de acuerdo a las necesidades de la población a la cual van
dirigidas, los objetivos que persiguen y la naturaleza de las distintas áreas des
estudio.
5.1.2.- Metodología en la enseñanza de matemática
Análisis de la problemática de la enseñanza de la matemática
Ciertos aspectos a considerar en la enseñanza de matemática involucran la labor
docente, por ejemplo: la formación del maestro, la toma de decisiones del maestro
en función de la bibliografía a utilizar, la selección de contenidos, entre otros
aspectos. Problemas de aprendizaje propios de la edad del alumno o factores
externos como la implementación de políticas educativas a nivel ministerial.
Problemas de dirección: el maestro no comunica a sus estudiantes acerca de las
actividades a realizar y los objetivos planteados
Problemas de evaluación: falta de información clara de la forma como el maestro
evaluará los diferentes elementos o aspectos (cognitivo, procedimental,
actitudinal).
Problemas de sistematización y coherencia de contenidos: los contenidos no
guardan una secuencia lógica, están desorganizados y se tiene poca planificación,
se destacan las omisiones de muchos argumentos que conducen al desconcierto de
los alumnos, ¡no entiendo!, ¡solo sabe para él!, ¡lo que enseña no sirve para nada!,
Son ejemplos de algunas frases que muestran ese descontento. Mientras en la
realización de tareas, el alumno no entiende lo que tiene que hacer, o lo que hace es
con la ayuda de alguien.

111
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
No se observan correctamente los requisitos y los procesos de retroalimentación
son casi nulos. No se construye la teoría y se limita al ejemplo y la resolución de
ejercicios tipo, sin el debido fundamento. Las aplicaciones son inexistentes y la
participación del estudiante es casi nula, limitándose a ser un espectador.
Problemas de método: son los que tienen que ver con la motivación, la promoción
del aprendizaje, las acciones que realizará el profesor para hacer agradables sus
clases. Los problemas de método se observan con las actitudes de los estudiantes,
el poco interés, la inasistencia, incumplimiento de tareas, malestar de los
estudiantes en la clase. Como resultado de los problemas de método, los alumnos
simplemente no aprenden de en forma adecuada.
Problemas de recursos: Los recursos disponibles, como textos de estudio,
biblioteca, laboratorios, etc., no se utilizan en forma óptima. No se consideran o no
se aprovechan las habilidades y capacidades del maestro y de los estudiantes
Recomendaciones metodológicas
La lógica matemática, la teoría de conjuntos, la teoría de funciones y los sistemas
numéricos son los pilares o estructuras en los cuales se basa la matemática. El
núcleo de la matemática lo constituyen las definiciones, teoremas, demostraciones,
las cuales se complementan con las aplicaciones, las cuales deben estar orientadas
de manera que el estudiante se desarrolle en forma integral como individuo dentro
de un enfoque socio cultural que entiende el lenguaje de las ingenierías.
Los instrumentos de evaluación deben reflejar de manera global estos cuatro pilares
de la matemática, el núcleo, las aplicaciones y su respectiva orientación. Así se
muestran algunos ejemplos de la forma de plantear ejercicios:
Forma incorrecta Forma correcta
Resolver la siguiente ecuación
(𝑎𝑥 + 1)2 = −𝑎2𝑥2 − 3
Dado 𝑎 ∈ ℝ+ . hallar si es posible 𝑥 ∈[0, +∞] tal que (𝑎𝑥 + 1)2 = −𝑎2𝑥2 − 3

112
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Forma incorrecta Forma correcta
Resolver la siguiente ecuación
3𝑥 + 5 = 𝑎
Dado 𝑎, 𝑏 ∈ ℝ . Resolver en ℝ
3𝑥 + 𝑎 = 𝑏
Forma incorrecta Forma correcta
(𝑎 + 𝑏)2 = 𝑎2 + 2𝑎𝑏 + 𝑏2 𝑎2 − 𝑏2 = (𝑎 − 𝑏)(𝑎 + 𝑏)
Sean 𝑎, 𝑏 ∈ ℤ, se verifica:
(𝑎 + 𝑏)2 = 𝑎2 + 2𝑎𝑏 + 𝑏2
𝑎2 − 𝑏2 = (𝑎 − 𝑏)(𝑎 + 𝑏)
A continuación se presentan los métodos, estrategias, técnicas que se recomiendan
en la enseñanza de matemática, tomados del documento de apoyo número 7 del
Colegio Experimental “Simón Bolívar”, titulado “Estrategias y técnicas para
explorar, conceptuar y evaluar el aprendizaje”.
Tabla 5.1 Proceso didáctico para la enseñanza de la matemática
Etapas Estrategias
1. Preparación
2. Exploración y
descubrimiento
3. Abstracción y organización
4. Fijación de
habilidades
5. Aplicación
Examen formal o informal de las habilidades o
vocabularios previos.
Presentación de un problema interesante que exija
improvisación del proceso, del concepto (u operación) a
modo de solución.
Elaboración de generalizaciones acerca de la operación y sus interrelaciones con otras.
Memorización de hechos.
Organización y memorización de tablas.
Práctica de repetición de la operación.
Experiencia en la aplicación de una variedad de
situaciones.
Problemas reales y simulados.
Reconocer las características que exige el empleo de la
operación.
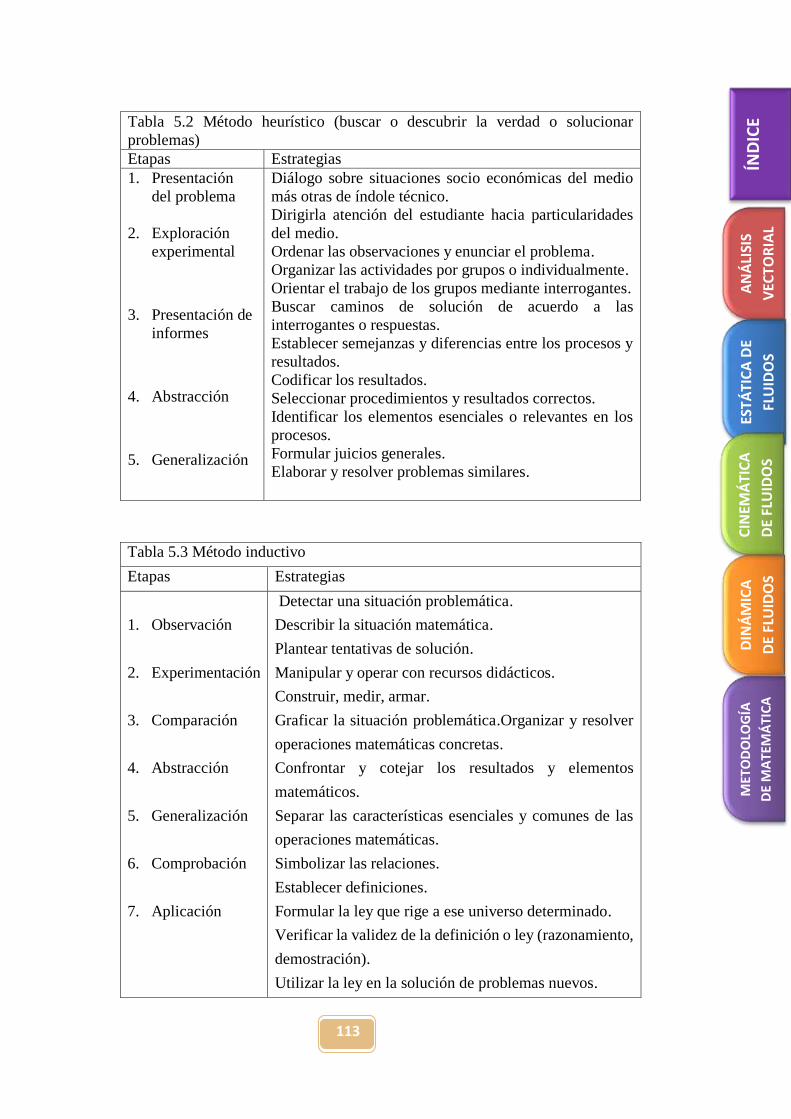
113
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Tabla 5.2 Método heurístico (buscar o descubrir la verdad o solucionar
problemas)
Etapas Estrategias
1. Presentación
del problema
2. Exploración
experimental
3. Presentación de
informes
4. Abstracción
5. Generalización
Diálogo sobre situaciones socio económicas del medio
más otras de índole técnico.
Dirigirla atención del estudiante hacia particularidades
del medio.
Ordenar las observaciones y enunciar el problema.
Organizar las actividades por grupos o individualmente.
Orientar el trabajo de los grupos mediante interrogantes.
Buscar caminos de solución de acuerdo a las
interrogantes o respuestas.
Establecer semejanzas y diferencias entre los procesos y
resultados.
Codificar los resultados.
Seleccionar procedimientos y resultados correctos.
Identificar los elementos esenciales o relevantes en los
procesos.
Formular juicios generales.
Elaborar y resolver problemas similares.
Tabla 5.3 Método inductivo
Etapas Estrategias
1. Observación
2. Experimentación
3. Comparación
4. Abstracción
5. Generalización
6. Comprobación
7. Aplicación
Detectar una situación problemática.
Describir la situación matemática.
Plantear tentativas de solución.
Manipular y operar con recursos didácticos.
Construir, medir, armar.
Graficar la situación problemática.Organizar y resolver
operaciones matemáticas concretas.
Confrontar y cotejar los resultados y elementos
matemáticos.
Separar las características esenciales y comunes de las
operaciones matemáticas.
Simbolizar las relaciones.
Establecer definiciones.
Formular la ley que rige a ese universo determinado.
Verificar la validez de la definición o ley (razonamiento,
demostración).
Utilizar la ley en la solución de problemas nuevos.
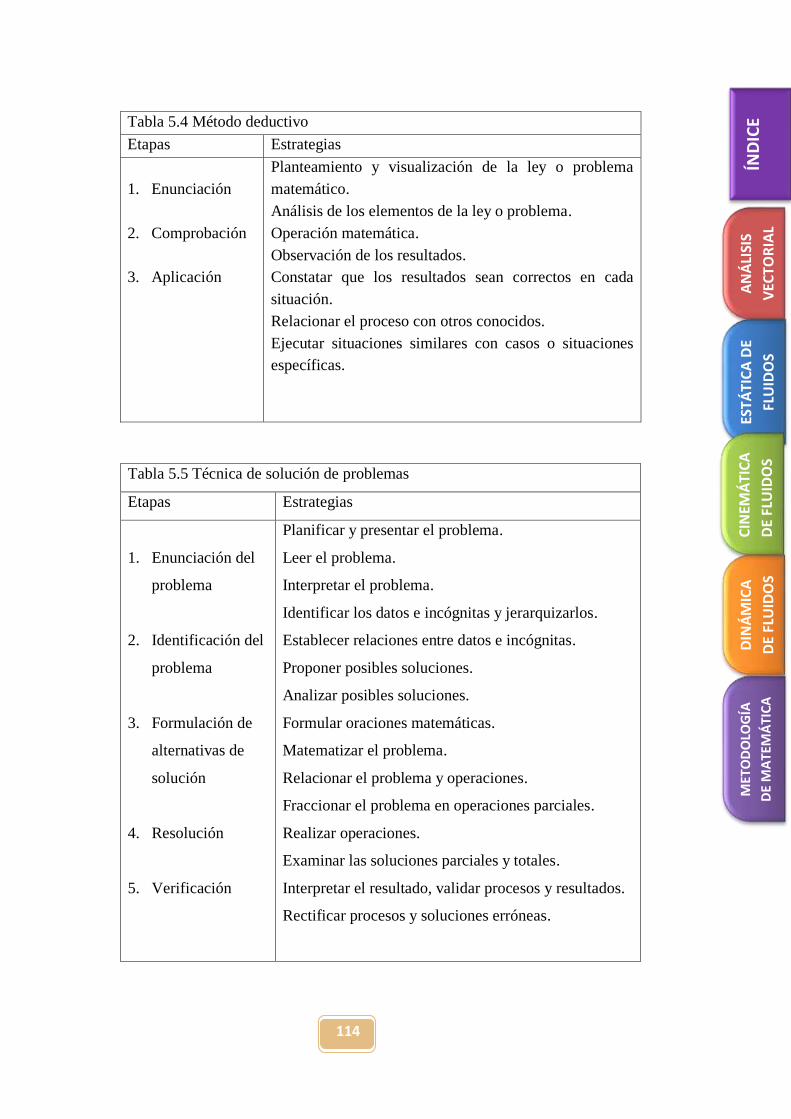
114
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Tabla 5.4 Método deductivo
Etapas Estrategias
1. Enunciación
2. Comprobación
3. Aplicación
Planteamiento y visualización de la ley o problema
matemático.
Análisis de los elementos de la ley o problema.
Operación matemática.
Observación de los resultados.
Constatar que los resultados sean correctos en cada
situación.
Relacionar el proceso con otros conocidos.
Ejecutar situaciones similares con casos o situaciones
específicas.
Tabla 5.5 Técnica de solución de problemas
Etapas Estrategias
1. Enunciación del
problema
2. Identificación del
problema
3. Formulación de
alternativas de
solución
4. Resolución
5. Verificación
Planificar y presentar el problema.
Leer el problema.
Interpretar el problema.
Identificar los datos e incógnitas y jerarquizarlos.
Establecer relaciones entre datos e incógnitas.
Proponer posibles soluciones.
Analizar posibles soluciones.
Formular oraciones matemáticas.
Matematizar el problema.
Relacionar el problema y operaciones.
Fraccionar el problema en operaciones parciales.
Realizar operaciones.
Examinar las soluciones parciales y totales.
Interpretar el resultado, validar procesos y resultados.
Rectificar procesos y soluciones erróneas.

115
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Uso de programas computacionales y calculadoras gráficas
Entre algunos aspectos a considerar cuando se usan programas computacionales y
calculadoras gráficas en la enseñanza de matemática podemos mencionar que
algunas calculadoras producen “automáticamente” la gráfica de una función, ante
lo cual el estudiante no tiene la oportunidad de aprender las técnicas que permiten
producir con papel y lápiz estas gráficas, aspecto que se traduce en un efecto
negativo en su conocimiento matemático.
En la actualidad el uso de estos programas ha venido extendiéndose, lo que ha dado
como resultado que los estudiantes se vuelven cada vez más dependientes y llegan
a utilizar las calculadoras para hacer operaciones que para muchos de nosotros
serían claramente elementales. Sin embargo, podemos aprovechar la potencialidad
de éstos como apoyo en el proceso de enseñanza y aprendizaje de la matemática.
Se sugiere presentar los conceptos matemáticos y utilizar la calculadora gráfica para
reforzarlos y avanzar más allá en el conocimiento, recordando que la tecnología
complementa el curso, pero no es la base del mismo. Los cambios se deben producir
incorporando la calculadora gráfica dentro del proceso de aprendizaje y se deben
integrar sin sacrificar la profundidad de los conceptos matemáticos. Las
calculadoras gráficas facilitan la exploración y el descubrimiento, favoreciendo una
activa aproximación al aprendizaje y, aunque se podría pensar que ellas sólo
permiten el trabajo individual, las investigaciones indican que promueven la
interacción entre estudiantes y maestros y entre el conjunto de estudiantes. Con la
incorporación de la tecnología queda libre el tiempo dedicado a cálculos a mano, es
decir, se genera un espacio que puede dedicarse a la resolución de problemas con
datos reales y al desarrollo de la comprensión conceptual.
El análisis de las distintas investigaciones desde diversas perspectivas realizado en
este trabajo, permite concluir que el desempeño de los alumnos en el aprendizaje
de la matemática mejora con el uso de las calculadoras gráficas. Esto sugiere la
necesidad de incorporarlas cada vez más en la enseñanza y aprendizaje de la
matemática durante el último ciclo de la secundaria y el primer ciclo universitario.
No obstante, se debe tener en cuenta que los efectos de su uso no son producto de
su mera presencia en el salón de clase. Estos efectos dependen del papel que se le
asigne a la tecnología dentro del sistema curricular. Además, el comportamiento de
116
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E este sistema depende de muchos factores que interactúan de manera dinámica entre
ellos. La calculadora gráfica es un elemento potenciador del cambio en el sistema,
que produce mejoras en la formación matemática del estudiante.
5.2.- Fundamentos de Matemáticas de Microsoft. Prácticas de matemática con
Matemáticas de Microsoft
Un excelente programa de matemática y muy sencillo de utilizar es Matemáticas de
Microsoft, cuando se ingresa al programa podemos observar el menú Ayuda donde
encontraremos las utilidades de Matemáticas de Microsoft :
“Matemáticas de Microsoft es un conjunto de herramientas matemáticas que puede
ayudarle a que su trabajo sea más rápido y sencillo. Lo más destacado de
Matemáticas de Microsoft es una compleja calculadora científica con amplias
capacidades de representación gráfica y de resolución de ecuaciones. Puede
utilizarla como una calculadora de mano, pulsando sus botones, o también puede
usar su teclado para escribir aquellas expresiones matemáticas que quiera que la
calculadora evalúe. Otras herramientas adicionales le ayudarán a evaluar triángulos
o a convertir cantidades de un sistema de unidades a otro.”
Podrá usar Matemáticas de Microsoft para las siguientes tareas:
1. Cálculos matemáticos estándar, tales como funciones, raíces y logaritmos.
2. Resolución de triángulos.
3. Convertir medidas de una unidad a otra.
4. Calcular funciones trigonométricas como el seno y el coseno.
5. Interpretar matrices y vectores, inversas y productos cruzados.
6. Calcular datos estadísticos, como media y desviación estándar.
7. Interpretar operaciones con números complejos.
8. Representar gráficas 2D y 3D en coordenadas cartesianas, polares, cilíndricas y
esféricas.
9. Ejecutar operaciones de cálculo de funciones, incluyendo el cálculo de
derivadas, integrales y límites, así como sumas y productos de sucesiones.

117
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 10. Resolución numérica y simbólica de ecuaciones.
Cuando abrimos Matemáticas de Microsoft, se observa su interfaz (figura 5.1), en
donde podemos ver desplegados los siguientes elementos:
- El teclado de la calculadora está dividido en diferentes grupos: Números
complejos, Estadísticas, Trigonometría, Álgebra lineal, Cálculo, Estándar y
Botones favoritos.
- La ficha Hoja de cálculo se muestra por defecto, en esta ficha se realizarán la
mayoría de los cálculos numéricos. Esta ficha incluye un campo de entrada de datos
y otro de salida. Cuando haga clic en los botones de la calculadora, estará
construyendo una expresión matemática en el campo de entrada. Cuando haga clic
en ENTER, Matemáticas de Microsoft evaluará la expresión de forma simbólica y
numérica (si procede), y a continuación mostrará los resultados en el campo de
salida de datos. En algunos casos, la salida de datos podrá incluir Resoluciones paso
a paso o información adicional acerca de la solución.
- La ficha Gráficas se utiliza para crear la mayoría de las gráficas matemáticas. Esta
ficha incluye un campo de entrada de datos para introducir las funciones,
ecuaciones, inecuaciones, conjuntos de datos o ecuaciones paramétricas que quiera
representar. Para trabajar con la gráfica después de haber sido representada, la ficha
Gráficas incluye una ventana que describe la gráfica representada y una ventana
donde se visualiza la gráfica.
Figura 5.1 Interfaz de Matemáticas de Microsoft
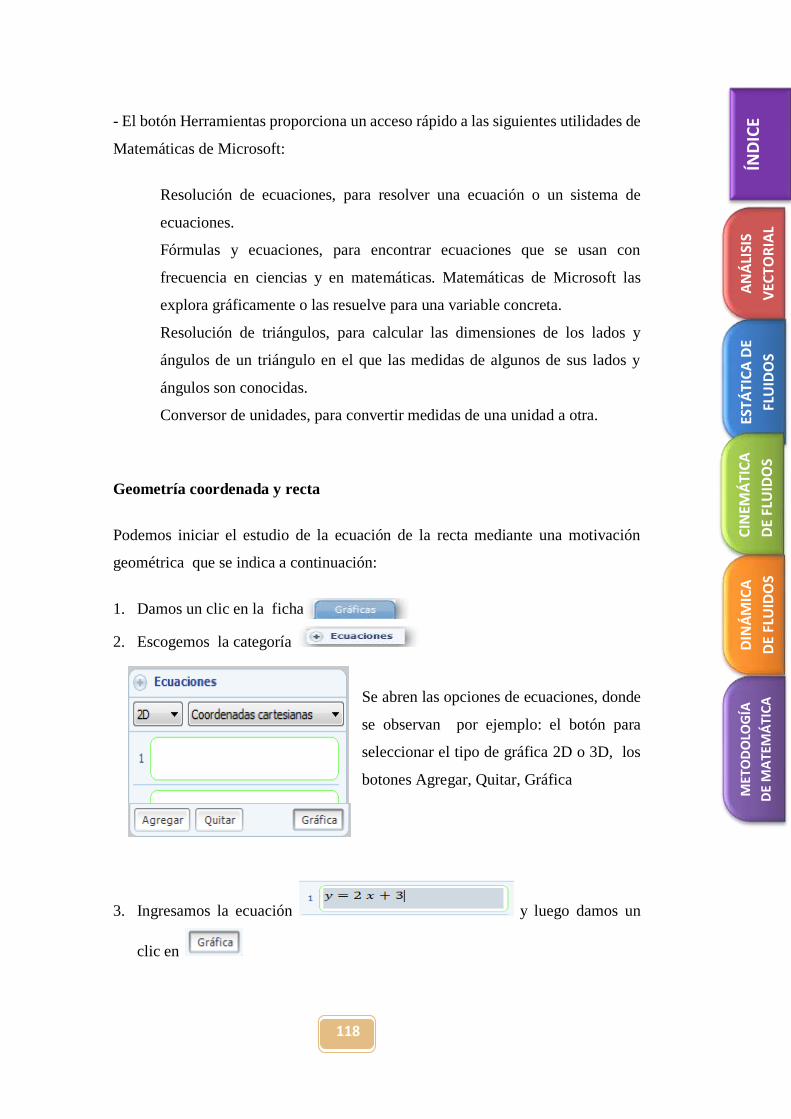
118
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E - El botón Herramientas proporciona un acceso rápido a las siguientes utilidades de
Matemáticas de Microsoft:
Resolución de ecuaciones, para resolver una ecuación o un sistema de
ecuaciones.
Fórmulas y ecuaciones, para encontrar ecuaciones que se usan con
frecuencia en ciencias y en matemáticas. Matemáticas de Microsoft las
explora gráficamente o las resuelve para una variable concreta.
Resolución de triángulos, para calcular las dimensiones de los lados y
ángulos de un triángulo en el que las medidas de algunos de sus lados y
ángulos son conocidas.
Conversor de unidades, para convertir medidas de una unidad a otra.
Geometría coordenada y recta
Podemos iniciar el estudio de la ecuación de la recta mediante una motivación
geométrica que se indica a continuación:
1. Damos un clic en la ficha
2. Escogemos la categoría
Se abren las opciones de ecuaciones, donde
se observan por ejemplo: el botón para
seleccionar el tipo de gráfica 2D o 3D, los
botones Agregar, Quitar, Gráfica
3. Ingresamos la ecuación y luego damos un
clic en
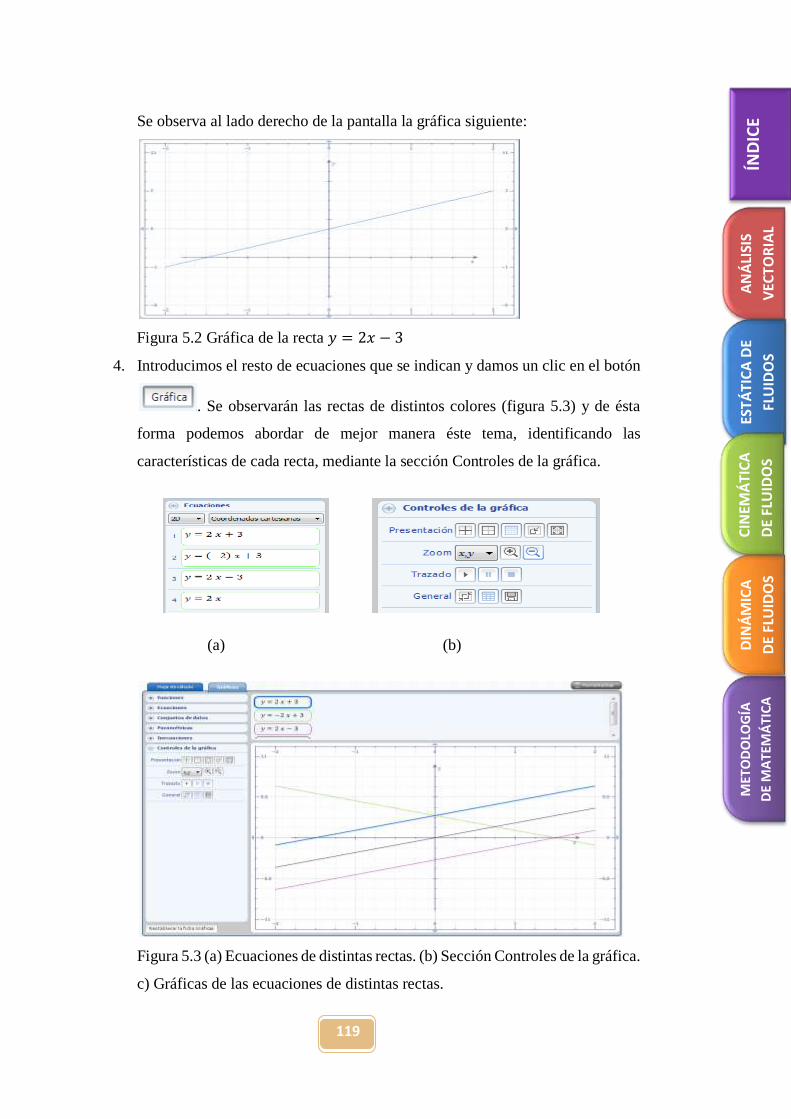
119
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Se observa al lado derecho de la pantalla la gráfica siguiente:
Figura 5.2 Gráfica de la recta 𝑦 = 2𝑥 − 3
4. Introducimos el resto de ecuaciones que se indican y damos un clic en el botón
. Se observarán las rectas de distintos colores (figura 5.3) y de ésta
forma podemos abordar de mejor manera éste tema, identificando las
características de cada recta, mediante la sección Controles de la gráfica.
(a) (b)
Figura 5.3 (a) Ecuaciones de distintas rectas. (b) Sección Controles de la gráfica.
c) Gráficas de las ecuaciones de distintas rectas.
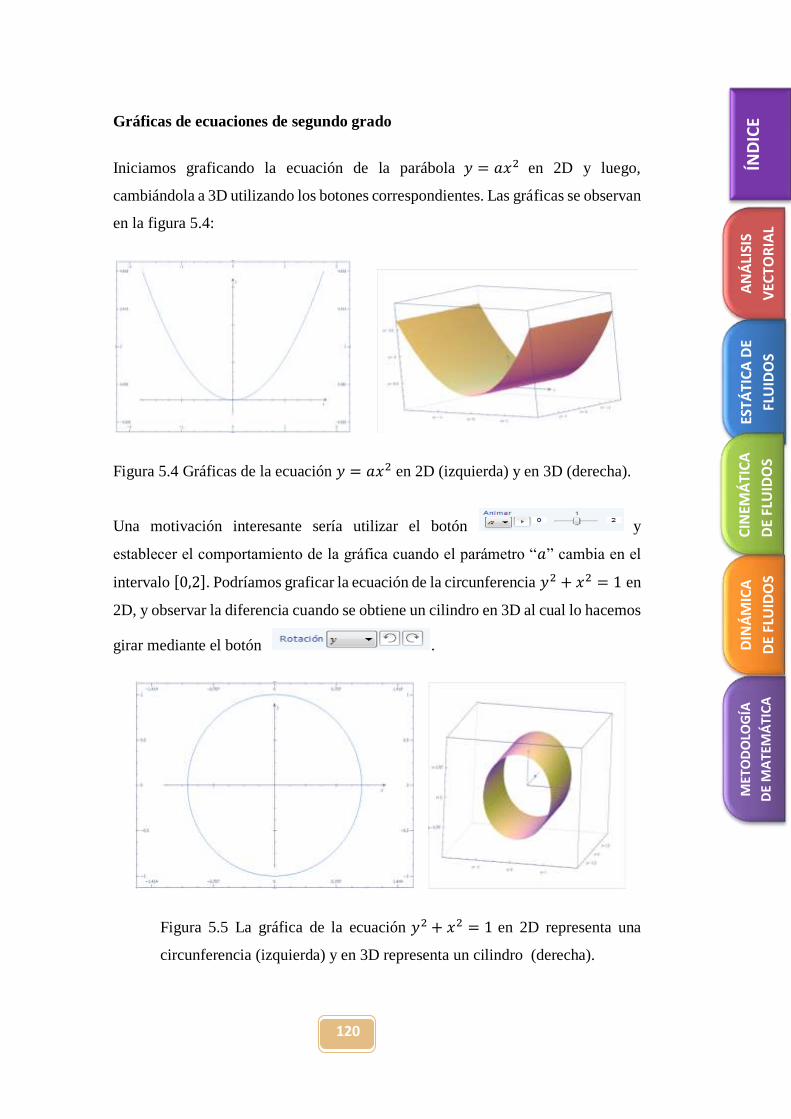
120
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Gráficas de ecuaciones de segundo grado
Iniciamos graficando la ecuación de la parábola 𝑦 = 𝑎𝑥2 en 2D y luego,
cambiándola a 3D utilizando los botones correspondientes. Las gráficas se observan
en la figura 5.4:
Figura 5.4 Gráficas de la ecuación 𝑦 = 𝑎𝑥2 en 2D (izquierda) y en 3D (derecha).
Una motivación interesante sería utilizar el botón y
establecer el comportamiento de la gráfica cuando el parámetro “𝑎” cambia en el
intervalo [0,2]. Podríamos graficar la ecuación de la circunferencia 𝑦2 + 𝑥2 = 1 en
2D, y observar la diferencia cuando se obtiene un cilindro en 3D al cual lo hacemos
girar mediante el botón .
Figura 5.5 La gráfica de la ecuación 𝑦2 + 𝑥2 = 1 en 2D representa una
circunferencia (izquierda) y en 3D representa un cilindro (derecha).
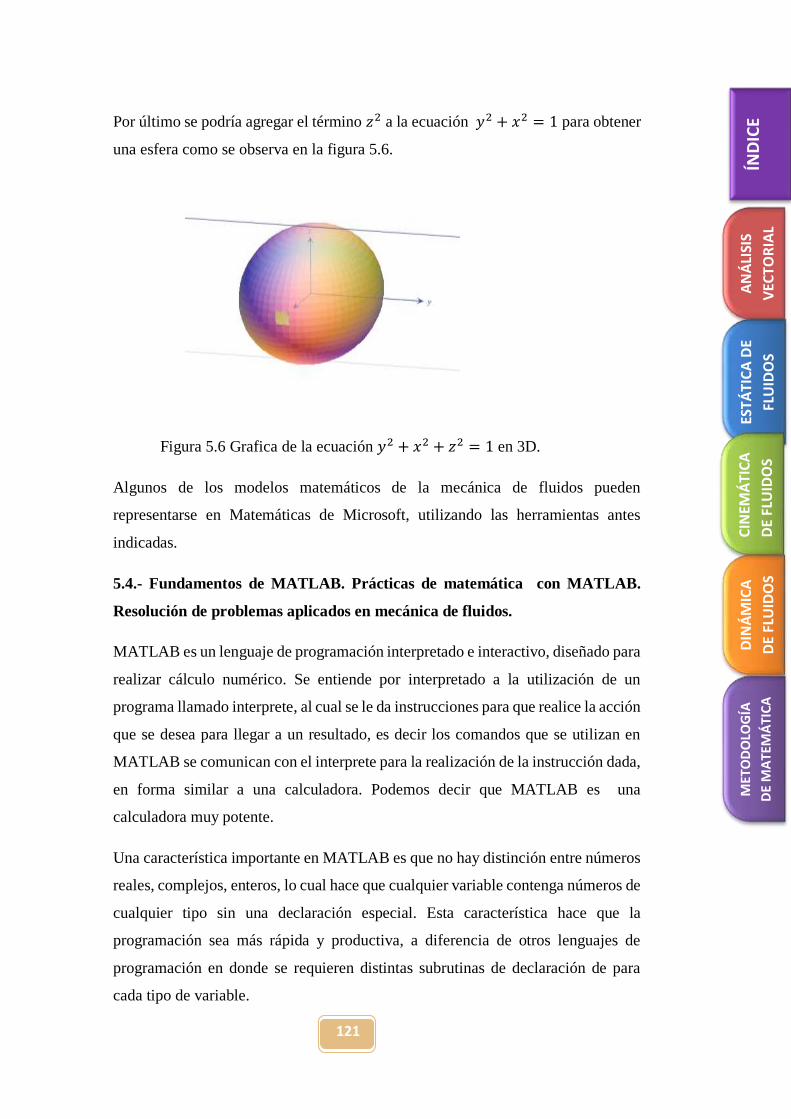
121
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Por último se podría agregar el término 𝑧2 a la ecuación 𝑦2 + 𝑥2 = 1 para obtener
una esfera como se observa en la figura 5.6.
Figura 5.6 Grafica de la ecuación 𝑦2 + 𝑥2 + 𝑧2 = 1 en 3D.
Algunos de los modelos matemáticos de la mecánica de fluidos pueden
representarse en Matemáticas de Microsoft, utilizando las herramientas antes
indicadas.
5.4.- Fundamentos de MATLAB. Prácticas de matemática con MATLAB.
Resolución de problemas aplicados en mecánica de fluidos.
MATLAB es un lenguaje de programación interpretado e interactivo, diseñado para
realizar cálculo numérico. Se entiende por interpretado a la utilización de un
programa llamado interprete, al cual se le da instrucciones para que realice la acción
que se desea para llegar a un resultado, es decir los comandos que se utilizan en
MATLAB se comunican con el interprete para la realización de la instrucción dada,
en forma similar a una calculadora. Podemos decir que MATLAB es una
calculadora muy potente.
Una característica importante en MATLAB es que no hay distinción entre números
reales, complejos, enteros, lo cual hace que cualquier variable contenga números de
cualquier tipo sin una declaración especial. Esta característica hace que la
programación sea más rápida y productiva, a diferencia de otros lenguajes de
programación en donde se requieren distintas subrutinas de declaración de para
cada tipo de variable.

122
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El análisis visual de los problemas matemáticos ayuda a comprender las
matemáticas, en MATLAB, mediante la utilización de unos pocos comandos se
puede presentar resultados matemáticos gráficos y objetos gráficos de carácter
científico que motivan el aprendizaje de los estudiantes.
Cuando se ingresa a MATLAB se observa la siguiente ventana (figura 5.7)
Figura 5.7 Interfaz de MATLAB versión 7.8.0.347.
La vista que se observa en la figura 5.7 puede ser diferente, dependiendo de la
versión del programa, y puede ser cambiada por el usuario mediante el menú
Desktop. Las componentes individuales orientadas a tareas concretas más
importantes del entorno de trabajo de MATLAB son las siguientes:
1. La ventana de comandos (Command Window): es la ventana en la que se
ejecutan interactivamente las instrucciones de MATLAB y en donde se
muestran los resultados correspondientes. En cierta forma es la ventana más
importante.
2. La ventana histórica de comandos (Command History) ofrece acceso a las
sentencias que se han ejecutado anteriormente en la ventana de comandos. A
éstas sentencias también se accede por medio de las teclas ↑ y ↓.
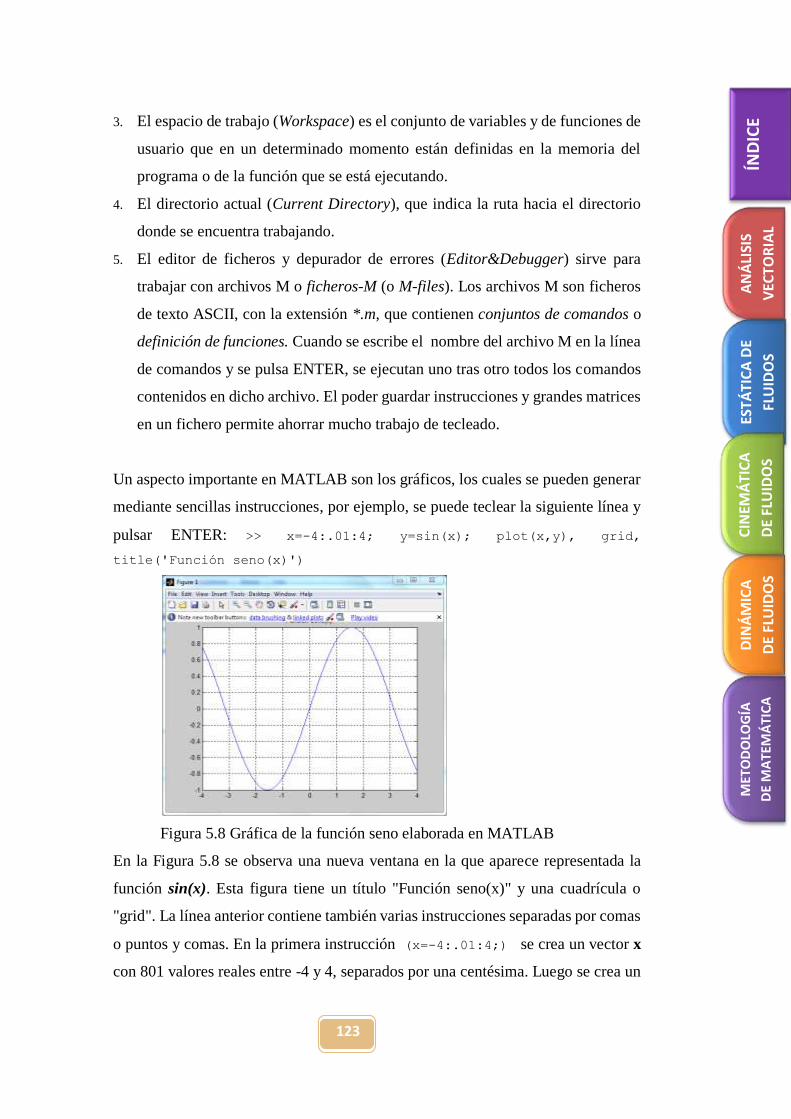
123
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 3. El espacio de trabajo (Workspace) es el conjunto de variables y de funciones de
usuario que en un determinado momento están definidas en la memoria del
programa o de la función que se está ejecutando.
4. El directorio actual (Current Directory), que indica la ruta hacia el directorio
donde se encuentra trabajando.
5. El editor de ficheros y depurador de errores (Editor&Debugger) sirve para
trabajar con archivos M o ficheros-M (o M-files). Los archivos M son ficheros
de texto ASCII, con la extensión *.m, que contienen conjuntos de comandos o
definición de funciones. Cuando se escribe el nombre del archivo M en la línea
de comandos y se pulsa ENTER, se ejecutan uno tras otro todos los comandos
contenidos en dicho archivo. El poder guardar instrucciones y grandes matrices
en un fichero permite ahorrar mucho trabajo de tecleado.
Un aspecto importante en MATLAB son los gráficos, los cuales se pueden generar
mediante sencillas instrucciones, por ejemplo, se puede teclear la siguiente línea y
pulsar ENTER: >> x=-4:.01:4; y=sin(x); plot(x,y), grid,
title('Función seno(x)')
Figura 5.8 Gráfica de la función seno elaborada en MATLAB
En la Figura 5.8 se observa una nueva ventana en la que aparece representada la
función sin(x). Esta figura tiene un título "Función seno(x)" y una cuadrícula o
"grid". La línea anterior contiene también varias instrucciones separadas por comas
o puntos y comas. En la primera instrucción (x=-4:.01:4;) se crea un vector x
con 801 valores reales entre -4 y 4, separados por una centésima. Luego se crea un

124
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E vector y, cada uno de cuyos elementos es el seno del correspondiente elemento del
vector x (y=sin(x);). Con la instrucción plot(x,y),se dibujan los valores de x e
y. Con la instrucción grid se establece la cuadrícula y con title('Función
seno(x)')se escribe el título.
Se pueden realizar cálculos sencillos de una sola variable, por ejemplo, para calcular
el volumen de una esfera de radio 4, escribimos las siguientes instrucciones en la
ventana de comandos.
>> r=4; vol=(4/3)*pi*r^3; vol
Luego al pulsar ENTER se observará el resultado:
vol =
268.0826
Para una explicación más detallada de la utilidad y manejo de MATLAB se
recomienda el texto número [12] que se menciona en la bibliografía, así como
también el uso de un buscador en internet, en el cual se encuentran disponibles
manuales gratuitos y videos que pueden descargarse fácilmente.
A continuación se presentan los códigos que deben escribirse en MATLAB para
analizar algunos modelos matemáticos que se revisaron en capítulos anteriores.
1. Modelo de la variación de la presión con la elevación para un gas a temperatura
constante.
En el editor de MATLAB se escriben las siguientes instrucciones y luego lo
podemos guardar como un archivo M
% DATOS DE ENTRADA % -p0 La presión inicial (a nivel del mar es 101.235kPa) % -pe peso especifico (a nivel del mar es 11.99N/m^3) % -y0 elevación inicial (a nivel del mar es 0m)
% DATOS DE SALIDA % p es la presión resultante % y es la elevación que varia.
clc; p0=input('Ingrese la presión inicial: '); pe=input('Ingrese el peso especifico:'); y0=input('Ingrese la elevación inicial: '); y=0:2:100; p=p0*exp(-(pe/p0)*(y-y0)); plot(y,p); grid on; xlabel('Elevación'); ylabel('Presión'); title('Modelo de presión de un gas a temperatura constante');

125
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E Cuando se ejecuta el archivo M que contiene las instrucciones señaladas se
obtiene la gráfica que se indica en la figura 5.9. Se observa que la presión
disminuye exponencialmente con la elevación.
Figura 5.9. Variación de la presión para un gas a temperatura constante
2. Modelo de la variación de la presión con la elevación para un gas a temperatura
variable.
Obtendremos la gráfica de la relación entre la elevación y la presión para un gas a
temperatura variable escribiendo en el editor de MATLAB, las siguientes
instrucciones y guardándolas en un archivo M.
% DATOS DE ENTRADA % -p0 La presión inicial % -T0 La temperatura inicial % -k constante o tasa de lapso que se obtiene de T=T0+ky, para
casos % terrestres es negativa % -R constante del gas
% DATOS DE SALIDA % p es la presión resultante % y es la elevación que varia. clc; p0=input('Ingrese la presión inicial, a nivel del mar es
101.325Kpa: '); T0=input('Ingrese la temperatura inicial, a nivel del mar es
15ºC=288K:'); k=input('Ingrese la constante K o tasa de lapso, para casos
terrestres es negativa: '); R=input('Ingrese la constante del gas R: '); y=0:10:500; p=p0*(T0./(T0+k*y)).^(9.8/(k*R)); plot(y,p); grid on; xlabel('Elevación'); ylabel('Presión'); title('Modelo de presión de un gas a temperatura variable');

126
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
La ejecución del archivo M que contiene las instrucciones anteriores genera la
gráfica que se indica en la figura 5.10. Se observa la disminución de la presión
con relación a la elevación.
Figura 5.10 Variación de la presión para un gas a temperatura variable.
3. Modelo de un campo de velocidad bidimensional, estacionario e incompresible
Si se tiene un campo estacionario, bidimensional e incompresible de velocidad
representado por la ecuación �⃗⃗� = (𝑢, 𝑣) = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗 .
Podemos observar el campo de velocidades en MATLAB ingresando las siguientes
instrucciones:
xmin=0; xmax=5; ymin=-2; ymax=6; [X,Y] = meshgrid(xmin:0.5:xmax,ymin:0.5:ymax); U = 0.5+0.8*X; V=1.5-0.8*Y; quiver(X,Y,U,V) title('Campo Vectorial de Velocidad'); xlabel('x'); ylabel('y'); grid on
Ejecutando el archivo M con las instrucciones anteriores se obtiene la gráfica del
campo de velocidades mostrado en la figura 5.11
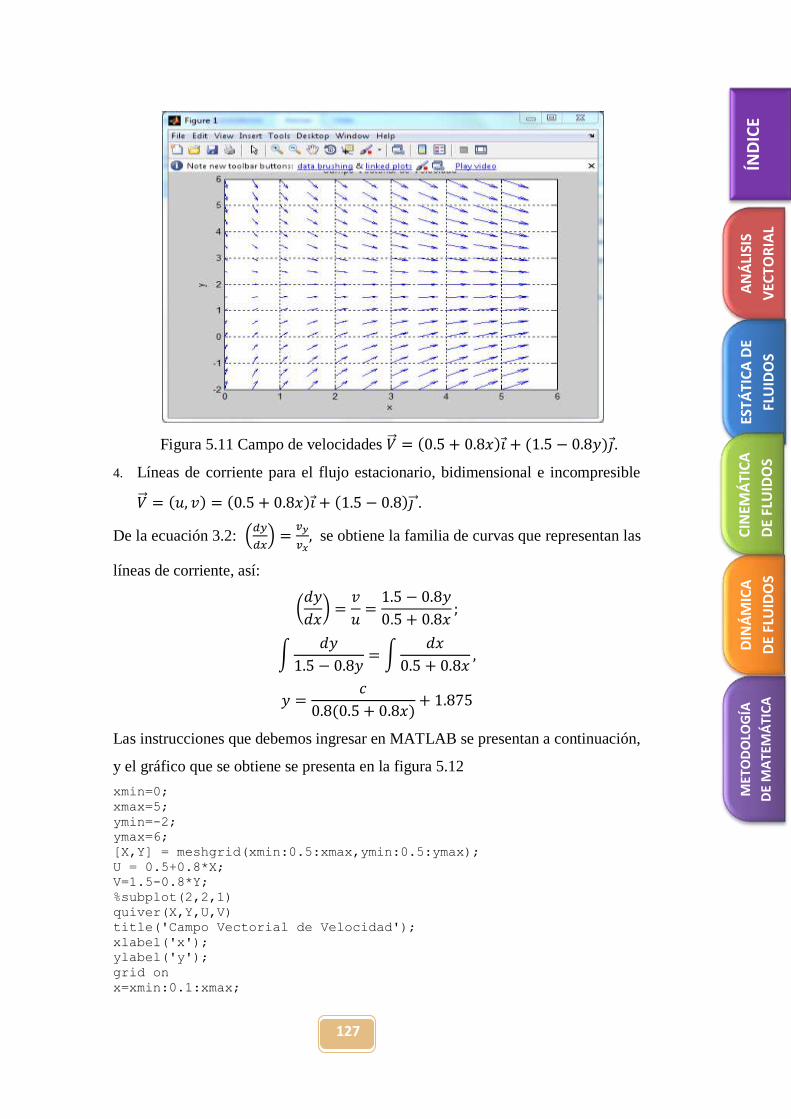
127
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
Figura 5.11 Campo de velocidades �⃗⃗� = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗.
4. Líneas de corriente para el flujo estacionario, bidimensional e incompresible
�⃗⃗� = (𝑢, 𝑣) = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8)𝑗 ⃗⃗⃗ .
De la ecuación 3.2: (𝑑𝑦
𝑑𝑥) =
𝑣𝑦
𝑣𝑥, se obtiene la familia de curvas que representan las
líneas de corriente, así:
(𝑑𝑦
𝑑𝑥) =
𝑣
𝑢=1.5 − 0.8𝑦
0.5 + 0.8𝑥;
∫𝑑𝑦
1.5 − 0.8𝑦= ∫
𝑑𝑥
0.5 + 0.8𝑥,
𝑦 =𝑐
0.8(0.5 + 0.8𝑥)+ 1.875
Las instrucciones que debemos ingresar en MATLAB se presentan a continuación,
y el gráfico que se obtiene se presenta en la figura 5.12
xmin=0; xmax=5; ymin=-2; ymax=6; [X,Y] = meshgrid(xmin:0.5:xmax,ymin:0.5:ymax); U = 0.5+0.8*X; V=1.5-0.8*Y; %subplot(2,2,1) quiver(X,Y,U,V) title('Campo Vectorial de Velocidad'); xlabel('x'); ylabel('y'); grid on x=xmin:0.1:xmax;
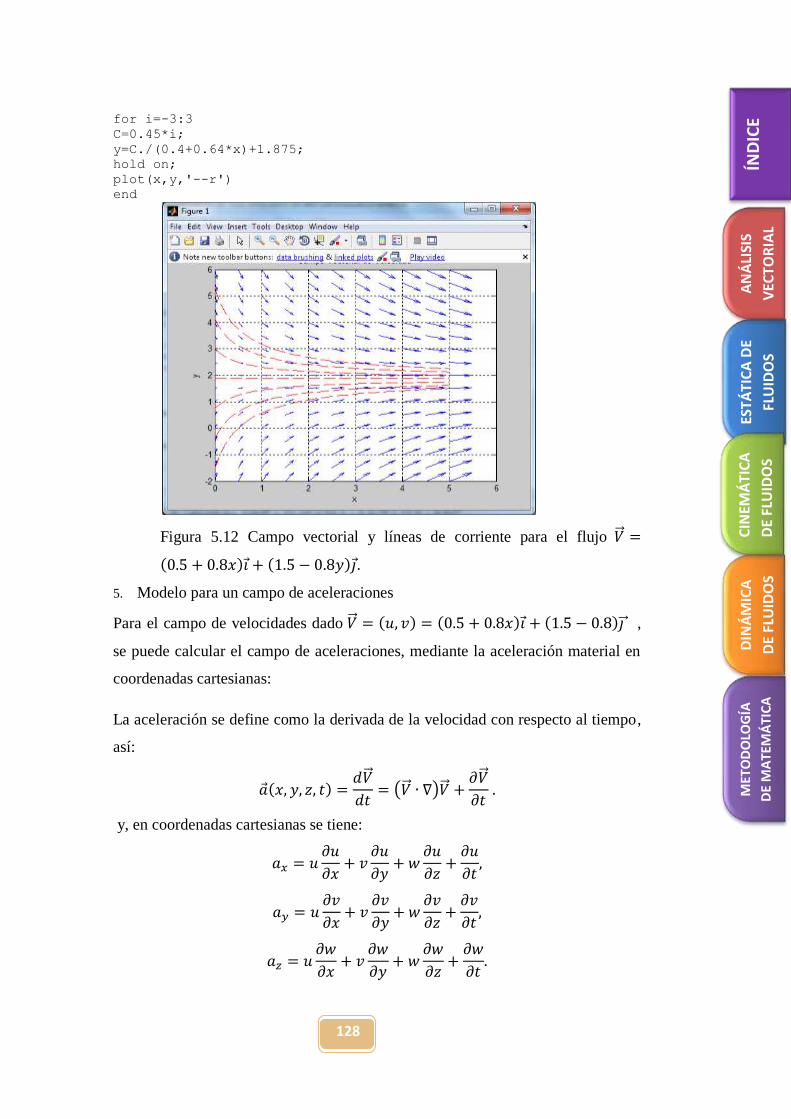
128
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E for i=-3:3 C=0.45*i; y=C./(0.4+0.64*x)+1.875; hold on; plot(x,y,'--r') end
Figura 5.12 Campo vectorial y líneas de corriente para el flujo �⃗⃗� =
(0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗.
5. Modelo para un campo de aceleraciones
Para el campo de velocidades dado �⃗⃗� = (𝑢, 𝑣) = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8)𝑗 ⃗⃗⃗ ,
se puede calcular el campo de aceleraciones, mediante la aceleración material en
coordenadas cartesianas:
La aceleración se define como la derivada de la velocidad con respecto al tiempo,
así:
�⃗�(𝑥, 𝑦, 𝑧, 𝑡) =𝑑�⃗⃗�
𝑑𝑡= (�⃗⃗� ∙ ∇)�⃗⃗� +
𝜕�⃗⃗�
𝜕𝑡 .
y, en coordenadas cartesianas se tiene:
𝑎𝑥 = 𝑢𝜕𝑢
𝜕𝑥+ 𝑣
𝜕𝑢
𝜕𝑦+ 𝑤
𝜕𝑢
𝜕𝑧+𝜕𝑢
𝜕𝑡,
𝑎𝑦 = 𝑢𝜕𝑣
𝜕𝑥+ 𝑣
𝜕𝑣
𝜕𝑦+ 𝑤
𝜕𝑣
𝜕𝑧+𝜕𝑣
𝜕𝑡,
𝑎𝑧 = 𝑢𝜕𝑤
𝜕𝑥+ 𝑣
𝜕𝑤
𝜕𝑦+ 𝑤
𝜕𝑤
𝜕𝑧+𝜕𝑤
𝜕𝑡.
129
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E El flujo es estacionario, por lo tanto 𝜕𝑢
𝜕𝑡=𝜕𝑣
𝜕𝑡=𝜕𝑤
𝜕𝑡= 0 , además el flujo es
bidimensional, por lo cual no existe velocidad en el eje z, es decir 𝑤 = 0
luego,
𝑎𝑥 = (0.5 + 0.8𝑥)(0.8) + (1.5 − 0.8𝑦)(0) + 0 + 0 = (0.4 + 0.64𝑥)𝑚/𝑠2
𝑎𝑦 = (0.5 + 0.8𝑥)(0) + (1.5 − 0.8𝑦)(−0.8) + 0 + 0 = (−1.2 + 0.64𝑦)𝑚/𝑠2
En MATLAB se escriben las instrucciones que se muestran a continuación. En la
figura 5.13 se muestra la gráfica del campo de aceleraciones obtenido
xmin=0; xmax=5; ymin=-2; ymax=6; [X,Y] = meshgrid(xmin:0.5:xmax,ymin:0.5:ymax); AX=0.4+0.64*X; AY=-1.2+0.64*Y; quiver(X,Y,AX,AY); title('Campo Vectorial de Aceleración'); xlabel('x'); ylabel('y'); grid on
Figura 5.13 Campo de aceleraciones �⃗� = (0.4 + 0.64𝑥)𝑖 + (−1.2 +
0.64𝑦)𝑗.

130
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E 6. Cálculo del campo de presión para un campo de velocidad conocido.
Se requiere calcular el campo de presión para el campo de velocidad:
�⃗⃗� = (𝑢, 𝑣) = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗 el cual es bidimensional
incompresible y estacionario.
En primer lugar verificamos si el campo de velocidad satisface la ecuación de
continuidad, así:
𝜕𝑢
𝜕𝑥+𝜕𝑣
𝜕𝑦+𝜕𝑤
𝜕𝑧= 0.8 − 0.8 + 0 = 0.
El campo de velocidad dad satisface la ecuación de continuidad, de no ser así el
campo propuesto no sería físicamente posible, y en consecuencia no sería posible
el cálculo del campo de presión.
Calculamos la componente en y de la cantidad de movimiento mediante la ecuación
de Navier-Stokes:
𝜌𝐷�⃗�
𝐷𝑡= −∇𝑝 + 𝜇∇2�⃗� + 𝜌�⃗�,
𝜌 (𝜕𝑣
𝜕𝑡+ 𝑢
𝜕𝑣
𝜕𝑥+ 𝑣
𝜕𝑣
𝜕𝑦+ 𝑤
𝜕𝑣
𝜕𝑧) = −
𝜕𝑝
𝜕𝑦+ 𝜇 (
𝜕2𝑣
𝜕𝑥2 +
𝜕2𝑣
𝜕𝑦2 +
𝜕2𝑣
𝜕𝑧2) + 𝜌𝑔𝑦,
𝜌(0 + 0 + (1.5 − 0.8𝑦)(−0.8) + 0) = −𝜕𝑝
𝜕𝑦+ 𝜇(0 + 0 + 0) + 0,
𝜕𝑝
𝜕𝑦= 𝜌(1.2 − 0.64𝑦).
(5.1)
Integrando la ecuación 5.1 se obtiene la ecuación del campo de presión:
𝑝 = 𝜌(1.2𝑦 − 0.32𝑦2) + 𝐶(𝑥). (5.2)
Se requiere ahora calcular la función 𝐶(𝑥). Calculamos la derivada parcial con
respecto a x de la ecuación 5.2 obteniéndose
𝜕𝑝
𝜕𝑥= 𝐶´(𝑥).
(5.3)

131
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E De la misma forma calculamos la componente en x de la cantidad de movimiento,
mediante la ecuación de Navier-Stokes así se tiene:
𝜕𝑝
𝜕𝑥= 𝜌(−0.4 − 0.64𝑥).
(5.4)
Comparando las ecuaciones 5.3 y 5.4 se obtiene la igualdad:
𝜕𝑝
𝜕𝑥= 𝐶´(𝑥) = 𝜌(−0.4 − 0.64𝑥)
(5.5)
Integramos la ecuación 5.5 para obtener C(x)
𝐶(𝑥) = 𝜌(−0.4𝑥 − 0.32𝑥2) + 𝐶
Reemplazando 𝐶(𝑥) en la ecuación de la presión 5.2 se tiene:
𝑝 = 𝜌(1.2𝑦 − 0.32𝑦2) + 𝜌(−0.4𝑥 − 0.32𝑥2) + 𝐶,
𝑝 = 𝜌(1.2𝑦 − 0.32𝑦2 − 0.4𝑥 − 0.32𝑥2) + 𝐶.
Por último podemos graficar el campo de presión en algún programa de
computación, por ejemplo en Matemáticas de Microsoft se obtiene la figura 5.14
Figura 5.14 Grafica del campo de presión del campo de velocidad �⃗⃗� =
(𝑢, 𝑣) = (0.5 + 0.8𝑥)𝑖 + (1.5 − 0.8𝑦)𝑗.
132
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E
BIBLIOGRAFIA
[1] J. Lara, J. Arroba, Análisis Matemático, Tercera edición, Centro de
Matemática de la U.C.E., Quito, 1998.
[2] James Stewart, Cálculo, Grupo Editorial Iberoamérica s. a. México. 1994.
[3] Jorge Lara, Cálculo en Varias Variables, Segunda edición, Centro de
Matemática de la U.C.E., Quito, 2006.
[4] Larson- Hosteller-Edwards, Calculo II de Varias Variables, Octava
edición, Editorial McGraw-Hill, México, 2006.
[5] Jerrold E. Mariden, Anthony J. Tromba. Cálculo vectorial, Editorial Fondo
Educativo Interamericano, S.A. , Bogotá , 1981.
[6] Irving H. Shames, Mecánica de Fluidos, Tercera edición, Editorial
McGraw-Hill, Bogotá, 1995.
[7] Yunus A. Çengel, John M. Cimbala, Mecánica de Fluidos-Fundamentos y
Aplicaciones, Editorial McGraw-Hill, México, 2006.
[8] James R, Welty, Fundamentos de transferencia de momento, calor y masa,
Editorial Limusa, México, 1993.
[9] Sears, Zemansky, Young, Freedman, Física Universitaria, Novena edición,
Editorial Addison Wesley, México, 1999.
[10] V. Streter – E. Wylie, Mecánica de fluidos, Editorial McGraw-Hill, Sexta
Edición, Bogotá,1975.
[11] Larson- Hosteller, Cálculo y Geometría Analítica, Sexta Edición,
Volumen 2, Editorial McGraw-Hill, Madrid 1999.
[12] Shoichiro Nakamura, Análisis Numérico y Visualización Gráfica con
MATLAB, Primera edición, Editorial Prentice-Hall Hispanoamericana
S.A., México, 1997.
[13] Colegio Experimental “Simón Bolívar”, Documentos pedagógicos de la
Comisión de Investigación y Experimentación Nº 1, 2, 3, 4, 5, 6, y 7,
Quito, 2005, 2006, 2007, 2008, 2009.

133
AN
ÁLI
SIS
VEC
TOR
IAL
ESTÁ
TIC
A D
E
FLU
IDO
S
CIN
EMÁ
TIC
A
DE
FLU
IDO
S
DIN
ÁM
ICA
DE
FLU
IDO
S
MET
OD
OLO
GÍA
DE
MA
TEM
ÁTI
CA
ÍN
DIC
E