Lección 4: Dinámica de los sistemas de partículas y del ...
21
1 Lección 4: Dinámica de los sistemas de partículas y del sólido rígido 1.-Introducción. 2.- Movimiento del centro de masa de un sistema de partículas. 3.- Momento angular de un sistema de partículas. 4.- Momento angular de un sólido rígido. Momento de inercia. 5.- Ecuaciones del movimiento. 6.- Energía cinética. 7.- Energía propia, energía interna y energía total. 8.- Colisiones. Bibliografía: Bibliografía: .- Alonso Alonso-Finn Finn (1995), capítulos 13 y 14. (1995), capítulos 13 y 14. .- Tipler (1992), vol I, capítulos 7, 8 y 9. .- Burbano-Burbano-García (1993), capítulos X y XI. .- Sears-Zemansky-Young (1998), capítulos 8, 9 y 10. © Mercedes Pacheco Martínez Transparencias Fundamentos de Física. I.T. Diseño Industrial
Transcript of Lección 4: Dinámica de los sistemas de partículas y del ...
1
Lección 4: Dinámica de los sistemas de partículas y del sólido rígido
1.-Introducción.
2.- Movimiento del centro de masa de un sistema de partículas.
3.- Momento angular de un sistema de partículas.
4.- Momento angular de un sólido rígido. Momento de inercia.
5.- Ecuaciones del movimiento.
6.- Energía cinética.
7.- Energía propia, energía interna y energía total.
8.- Colisiones.
Bibliografía:Bibliografía:..-- AlonsoAlonso--FinnFinn (1995), capítulos 13 y 14.(1995), capítulos 13 y 14..- Tipler (1992), vol I, capítulos 7, 8 y 9.
.- Burbano-Burbano-García (1993), capítulos X y XI.
.- Sears-Zemansky-Young (1998), capítulos 8, 9 y 10.
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
2
L4:Dinámica de los sistemas de partícula y del sólido rígido 1.- Introducción
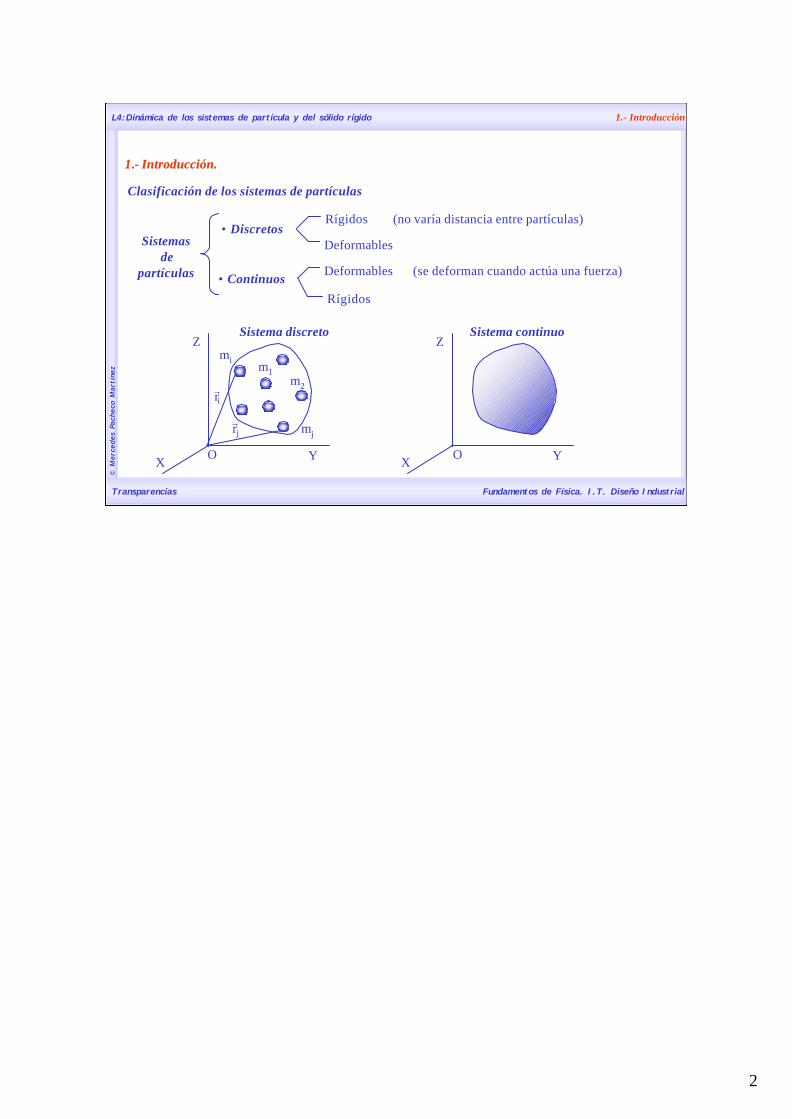
1.1.-- Introducción.Introducción.
Clasificación de los sistemas de partículas
Sistemasde
partículas
• Discretos
• Continuos
Deformables
Rígidos ⇒ (no varía distancia entre partículas)
Deformables ⇒ (se deforman cuando actúa una fuerza)
Rígidos
X Y
Z
O
mi
mj
m1m2
irr
jrr
X Y
Z
O
Sistema discreto Sistema continuo
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
3
L4:Dinámica de los sistemas de partícula y del sólido rígido 2.- Movimiento del CM de un sistema de partículas
.- Centro de Masa (CM)
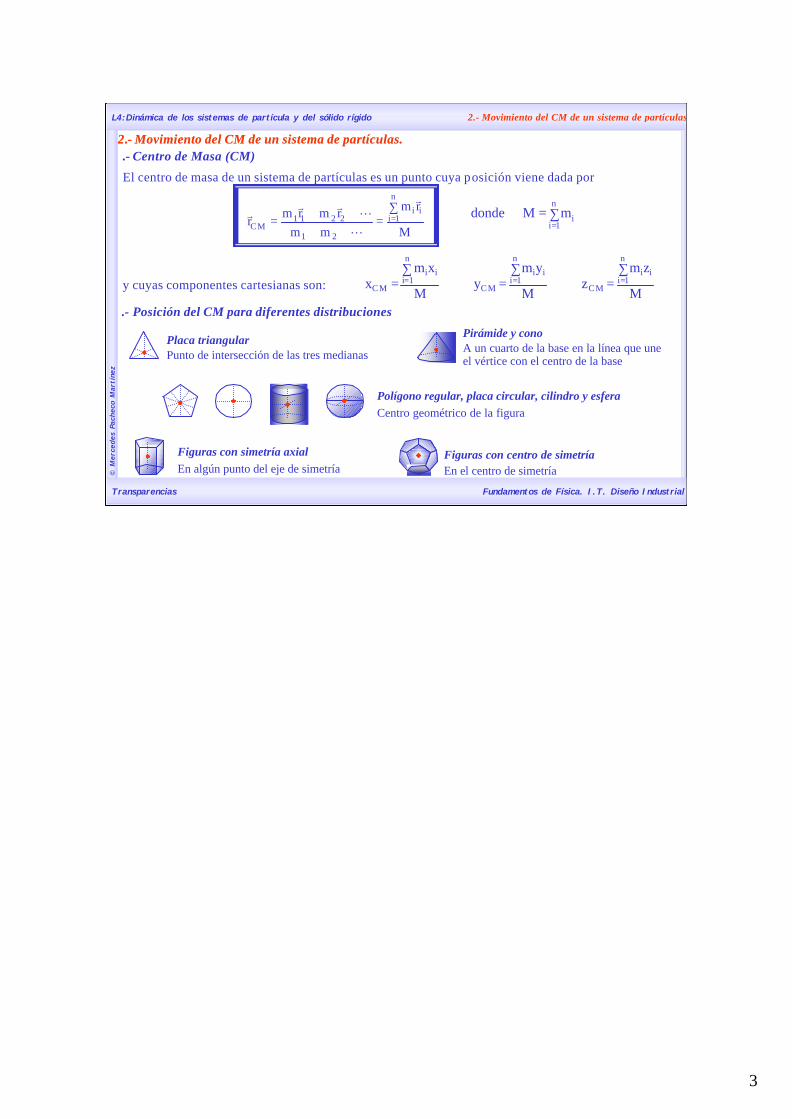
El centro de masa de un sistema de partículas es un punto cuya posición viene dada por
y cuyas componentes cartesianas son:
∑==
n
1iimM donde
M
rm
mm
rmrmr
n
1iii
21
2211CM
∑=
++++= =
r
L
Lrr
r
M
xmx
n
1iii
CM
∑= =
M
ymy
n
1iii
CM
∑= =
M
zmz
n
1iii
CM
∑= =
.- Posición del CM para diferentes distribuciones
Placa triangularPunto de intersección de las tres medianas
Polígono regular, placa circular, cilindro y esferaCentro geométrico de la figura
Pirámide y conoA un cuarto de la base en la línea que une el vértice con el centro de la base
Figuras con simetría axialEn algún punto del eje de simetría
Figuras con centro de simetríaEn el centro de simetría
2.2.-- Movimiento del CM de un sistema de partículas.Movimiento del CM de un sistema de partículas.
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
4
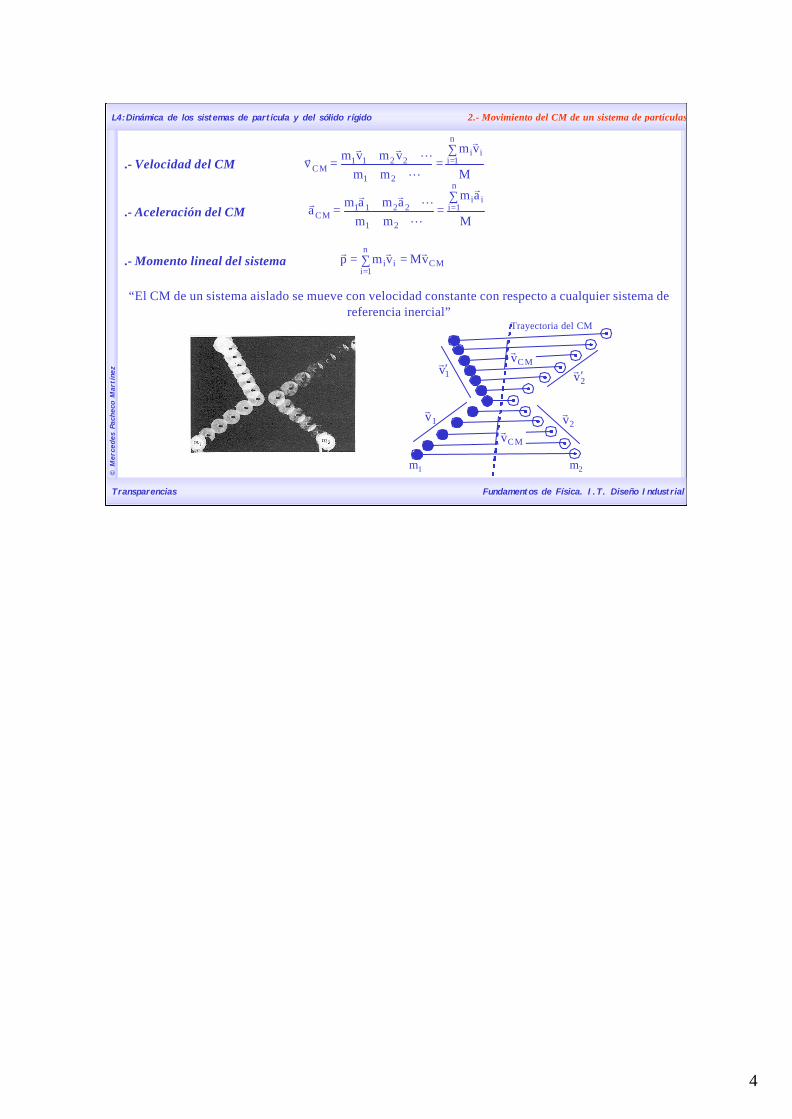
.- Velocidad del CM
.- Aceleración del CM
.- Momento lineal del sistema
“El CM de un sistema aislado se mueve con velocidad constante con respecto a cualquier sistema de referencia inercial”
M
vm
mm
vmvmv
n
1iii
21
2211CM
∑=
++++= =
r
L
Lrr
r
M
am
mm
amama
n
1iii
21
2211CM
∑=
++++= =
r
L
Lrr
r
CM
n
1iii vMvmp
rrr =∑==
m1 m2
Trayectoria del CM
CMvr
CMvr
1vr
1v′r
2vr
2v′r
L4:Dinámica de los sistemas de partícula y del sólido rígido 2.- Movimiento del CM de un sistema de partículas© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

5
.- Sistema Laboratorio (SL) y Sistema Centro de Masa (SCM)
Sistema Laboratorio (SL)
sistema de referencia inercial
Sistema Centro de Masa (SCM)
sistema de referencia “no” inercial
Relación entre las magnitudes cinemáticas de una partícula del sistema respecto a ambos sistemas de referencia
O
X
Y
Z
O’
X’
Y’
Z’
SCM
SL
CMirr
ir ′r
CMrr
CMii rrrrrr +′= CMii vvv
rrr +′= CMii aaarrr +′= 0pp
n
1ii
rrr =∑ ′=′=
L4:Dinámica de los sistemas de partícula y del sólido rígido 2.- Movimiento del CM de un sistema de partículas© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
6
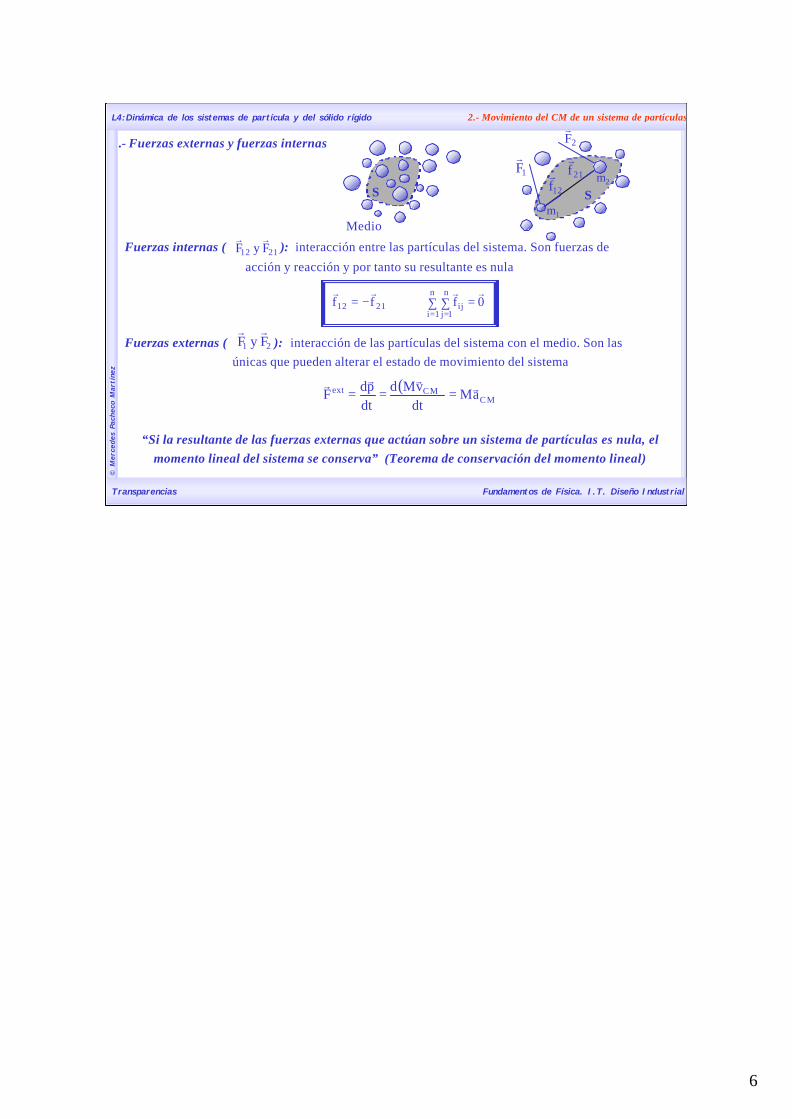
.- Fuerzas externas y fuerzas internas
Medio
Sm1
m21F
r2F
r
12fr 21f
r
S
21 Fy Frr
Fuerzas externas ( ): interacción de las partículas del sistema con el medio. Son las
únicas que pueden alterar el estado de movimiento del sistema
“Si la resultante de las fuerzas externas que actúan sobre un sistema de partículas es nula, el momento lineal del sistema se conserva” (Teorema de conservación del momento lineal)
2112 Fy Frr
Fuerzas internas ( ): interacción entre las partículas del sistema. Son fuerzas de
acción y reacción y por tanto su resultante es nula
( )CM
CMext aMdtvMd
dtpd
Fr
rrr===
0fffn
1i
n
1jij2112
rrrr=∑ ∑⇒−=
= =
L4:Dinámica de los sistemas de partícula y del sólido rígido 2.- Movimiento del CM de un sistema de partículas© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
7
CM
Pr
Trayectoria del CM
CM
Trayectoria del CM de la Tierra
CM
Trayectoria del CM de la bomba
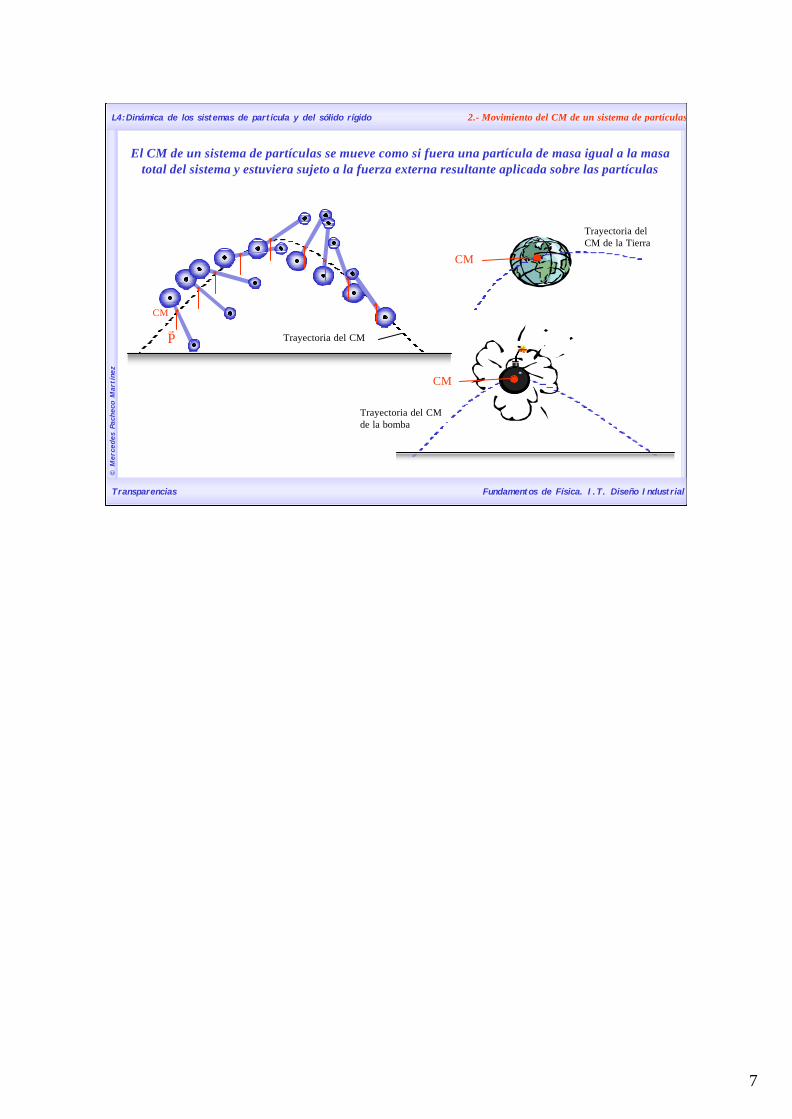
El CM de un sistema de partículas se mueve como si fuera una partícula de masa igual a la masa total del sistema y estuviera sujeto a la fuerza externa resultante aplicada sobre las partículas
L4:Dinámica de los sistemas de partícula y del sólido rígido 2.- Movimiento del CM de un sistema de partículas© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
8
O
X
Y
Z
X’
Y’Z’
SL
CMrr
intLr
orbLr
L4:Dinámica de los sistemas de partícula y del sólido rígido 3.- Momento angular de un sistema de partículas
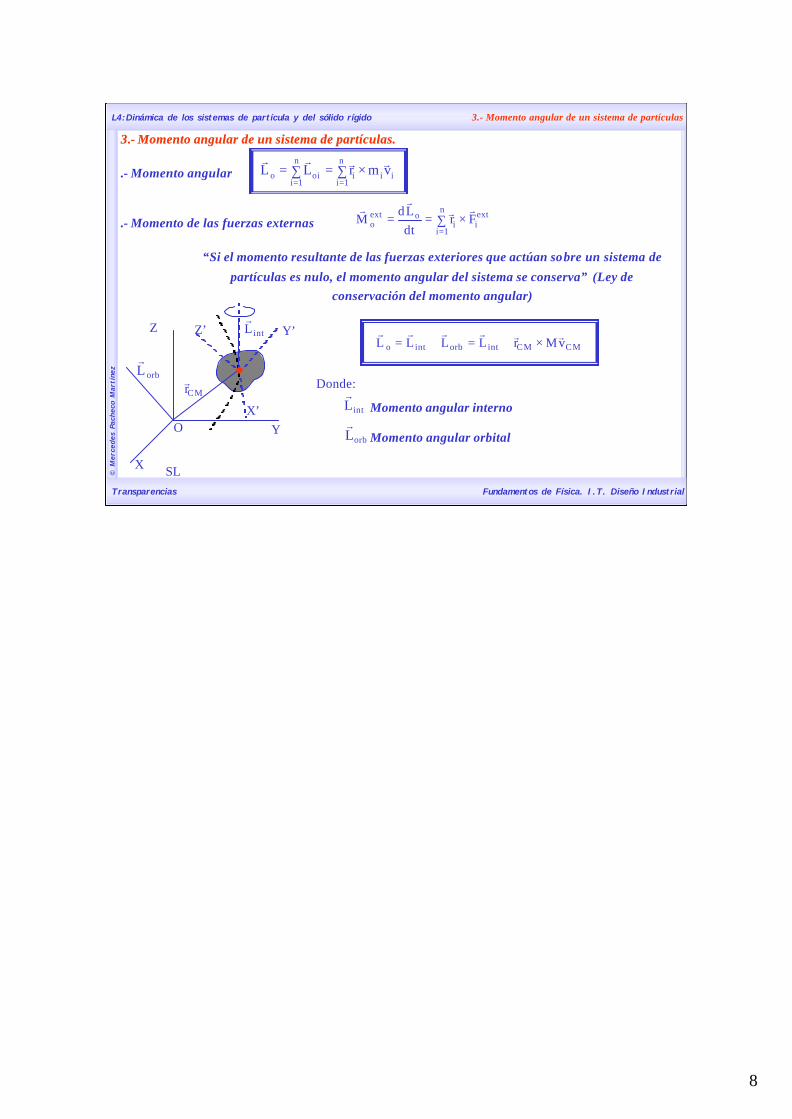
3.3.-- Momento angular de un sistema de partículas.Momento angular de un sistema de partículas.
.- Momento angular
.- Momento de las fuerzas externas
“Si el momento resultante de las fuerzas exteriores que actúan sobre un sistema de partículas es nulo, el momento angular del sistema se conserva” (Ley de
conservación del momento angular)
intLr
orbLr
Donde:
Momento angular interno
Momento angular orbital
∑ ×=∑===
n
1iiii
n
1ioio vmrLL
rrrr
∑ ×===
n
1i
extii
oexto Fr
dt
LdM
rrr
r
CMCMintorbinto vMrLLLLrrrrrr
×+=+=
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
9
L4:Dinámica de los sistemas de partícula y del sólido rígido 4.- Momento angular de un sólido rígido.Momento de inercia
4.4.-- Momento angular de un sólido rígido. Momento de InerciaMomento angular de un sólido rígido. Momento de Inercia
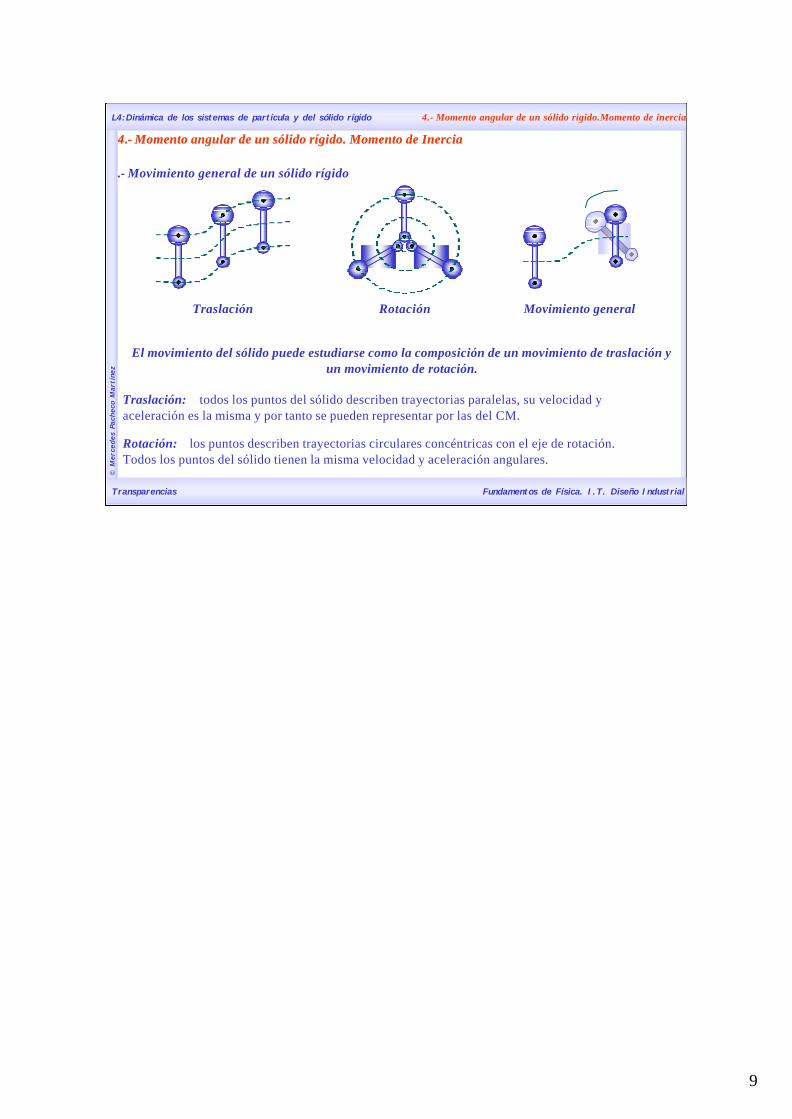
.- Movimiento general de un sólido rígido
Traslación Rotación Movimiento general
El movimiento del sólido puede estudiarse como la composición de un movimiento de traslación y un movimiento de rotación.
Traslación: todos los puntos del sólido describen trayectorias paralelas, su velocidad y aceleración es la misma y por tanto se pueden representar por las del CM.
Rotación: los puntos describen trayectorias circulares concéntricas con el eje de rotación. Todos los puntos del sólido tienen la misma velocidad y aceleración angulares.
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
10
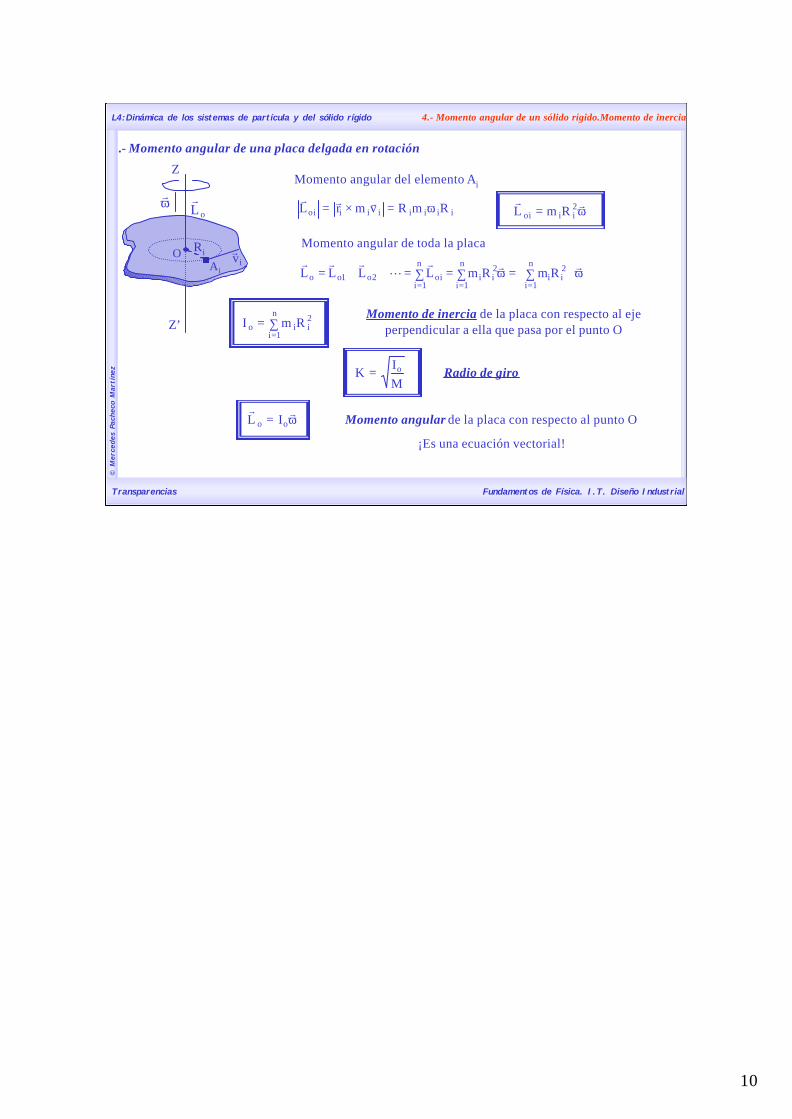
.- Momento angular de una placa delgada en rotación
⇒ω=×= iiiiiiioi RmRvmrL rrr
Momento angular del elemento Ai
ω
∑=∑ ω=∑=++=
===
rrrL
rrr n
1i
2ii
n
1i
2ii
n
1ioi2o1oo RmRmLLLL
Momento angular de toda la placa
∑==
n
1i
2iio RmI
Momento de inercia de la placa con respecto al eje perpendicular a ella que pasa por el punto O
ω= rroo IL Momento angular de la placa con respecto al punto O
¡Es una ecuación vectorial!
Z
Z’
O Riiv
r
ωr
oLr
Ai
M
IK o= Radio de giro
ω= rr 2iioi RmL
L4:Dinámica de los sistemas de partícula y del sólido rígido 4.- Momento angular de un sólido rígido.Momento de inercia© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

11
.- Momento angular de un sólido rígido de forma arbitraria
Momento angular del elemento Ai
Z’
O
Ri
ivr
ωr
oiLr
irr
Z
Ai
Es un vector perpendicular al plano formado por y iv
rirr
El momento angular resultante tendrá una dirección distinta a la de la velocidad angular pero lo que se cumplirá siempre para la componente del momento angular en el eje de rotación es que:
ω= zoz IL¡Ecuación escalar!
Es válida para cualquier sólido
Para cualquier cuerpo existen al menos tres direcciones perpendiculares para las que el momento angular es paralelo al eje de rotación. Estos son los tres ejes principales de inercia y sus
correspondientes momentos de inercia se conocen como momentos principales de inercia
iiioi vmrLrrr
×=
L4:Dinámica de los sistemas de partícula y del sólido rígido 4.- Momento angular de un sólido rígido.Momento de inercia© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

12
Xo
Yo
Zo
Xo
Yo
Zo
Xo
Yo
Zo.- Ejes principales de inercia
Si el eje de rotación es uneje principal de inercia
Si el eje de rotación no es un eje principal de inerciaω=
rroo IL ω= zoz IL
.- Teorema de Steiner .- Teorema de los ejes perpendiculares
2CMe MdII +=
YXZ III +=
X
Z
O Y
Z’
dX
Z
OY
X’ CMY’d
xCMyCM
L4:Dinámica de los sistemas de partícula y del sólido rígido 4.- Momento angular de un sólido rígido.Momento de inercia© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

13
Cilindro
R
L
RL
2o MR
21
I =
( )22o LR3M
121
I +=
a b
c ( )22o baM
121
I +=
Paralelepípedo
ab
ab
( )22o baM
121
I +=
2o Mb
121
I =
Placa rectangular
Varilla delgada
L 2o ML
121
I =
Disco
R
R
2o MR
21
I =
2o MR
41
I =
R
Esfera
2o MR
52
I =R 2
o MRI =
Anillo
L4:Dinámica de los sistemas de partícula y del sólido rígido 4.- Momento angular de un sólido rígido.Momento de inercia© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

14
L4:Dinámica de los sistemas de partícula y del sólido rígido 5.- Ecuaciones del movimiento
5.5.-- Ecuaciones del movimientoEcuaciones del movimiento
.- Traslación Todas las partículas del sólido tienen trayectorias paralelas y la misma velocidad
y aceleración, igual a las de su CM.
Dinámica de traslación
.- Rotación Todas las partículas del sólido giran en torno al mismo eje y tienen la misma
velocidad y aceleración angulares.
Dinámica de rotaciónωr
CMvr
α= rro
exto IM
CMext aMF
rr=
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

15
.- Rodadura El sólido rueda sin deslizar sobre la superficie.
CM CM
P
Pϕ
R
S CM
SCM
Si existe fuerza de rozamiento ésta es estática (no realiza trabajo)
RsCM ϕ= RvCM ω= Ra CM α=
.- Condiciones de equilibrio
Traslación
Rotación
.- Estática (además de las anteriores)
Traslación Rotación
constantev0a0F CMCMext =⇒=⇒= rrrrr
constante00M exto =ω⇒=α⇒= rrrrr
0vCM
rr = 0CM
rr=ω
L4:Dinámica de los sistemas de partícula y del sólido rígido 5.- Ecuaciones del movimiento© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

16
L4:Dinámica de los sistemas de partícula y del sólido rígido 6.- Energía cinética
6.6.-- Energía cinéticaEnergía cinética
.- Teorema de Köening
.- Energía cinética de un sólido rígido
.- Teorema del trabajo y la energía cinética
∑=
=++=n
1i
2ii
222
211 vm
21
vm21
vm21
Ec L
EcWWW extint ∆=+=““La La variación de la energía cinéticavariación de la energía cinética de un sistema de de un sistema de
partículas es igual al partículas es igual al trabajo realizadotrabajo realizado sobre el sistema sobre el sistema por por las fuerzas externas y por las fuerzas internaslas fuerzas externas y por las fuerzas internas””
int2CMintorb EcMv
21
EcEcEc +=+=
Energía cinética de un sistema de partículas
2o
2CMrottras I
21
Mv21
EcEcEc ω+=+=
La Ec de un sistema de partículas es la suma de la Ec orbital (del CM) y la Ec interna (respecto al CM)
Donde:
Ectras es la energía cinética de traslaciónEcrot es la energía cinética de rotación
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

17
L4:Dinámica de los sistemas de partícula y del sólido rígido 7.- Energía propia, energía interna y energía total
7.7.-- Energía propia, energía interna y energía totalEnergía propia, energía interna y energía total
.- Energía propia
Sí las fuerzas internas son conservativas ⇒ existe una energía potencial interna , Epint , que depende de la posición relativa entre las part ículas y por tanto es independiente del sistema de
referencia. El trabajo realizado por las fuerzas internas será:
intint EpW ∆−=
intEpEcU +=Se define la energía propia de un sistema de partículas como:
.- Conservación de la energía
Sí las fuerzas internas son conservativas: intextintext EpWWWEc ∆−=+=∆
( ) ⇒+∆=∆+∆= intintext EpEcEpEcW UWext ∆=
La energía propia de un sistema de partículas aislado permanece constante con respecto a un observador inercial. ¡¡ Principio de validez general !!
Sí el sistema está aislado: cteU0U0Wext =⇒=∆⇒=
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

18
.- Energía interna
Energía potencial interna :
L4:Dinámica de los sistemas de partícula y del sólido rígido 7.- Energía propia, energía interna y energía total
Energía cinética interna:
Energía interna:
⇒++=+= int2CMintint EpMv
21
EcEpEcU
También se puede expresar la energía propia como:
Y el trabajo de las fuerzas externas como:
⇒∆+
∆+∆=∆+∆= int
2CMintintext EpMv
21
EcEpEcW
intextCMext UWconstantev0F Sí ∆=⇒=⇒=• rrr
∆=⇒=• 2
CMextint Mv21
WconstanteU Sí
2CMint Mv
21
UU +=
∆+∆= 2
CMintext Mv21
UW
∑=ij pares
ijint EpEp ∑=∑===
n
1i
2ii
n
1iiint 'vm
21
'EcEc
intintint EpEcU +=
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

19
.- Energía total
L4:Dinámica de los sistemas de partícula y del sólido rígido 7.- Energía propia, energía interna y energía total
Sí las y las son conservativas :extFr intf
r
constanteEpU0EpUEpUUW
EpWextextext
ext
extext =+⇒=∆+∆⇒∆−=∆⇒
∆=∆−=
extEpUE += Energía total
Sí las fuerzas externas e internas que realizan trabajo sobre un sistema de partículas son conservativas, la energía total del sistema se conserva
En un sólido rígido, la distancia relativa entre las partículas no varía y por tanto su energía potencial interna es constante , luego
⇒∆+∆+∆=∆+∆=∆ extintext EpEpEcEpUE
La energía total del sólido rígido se conserva sí las fuerzas externas que realizan trabajo son conservativas
extEpEcE ∆+∆=∆
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial

20
L4:Dinámica de los sistemas de partícula y del sólido rígido 8.- Colisiones
8.8.-- ColisionesColisiones
Colisión: interacción mutua entre partículas que intercambian momento y energía
Durante la colisión:
( ) despuésantesext pp0FI
rrrrr=⇒=
Es decir, el momento lineal justo antes de la colisión es igual al momento lineal justo después de la colisión. Esto no quiere decir que se conserve el momento lineal
( ) ( )despuésintantesintext EpEcEpEc0W +=+⇒=
Es decir, la energía propia justo antes de la colisión es igual a la energía propia justo después de la colisión. Esto no quiere decir que la energía propia sea constante
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial
21
L4:Dinámica de los sistemas de partícula y del sólido rígido 8.- Colisiones
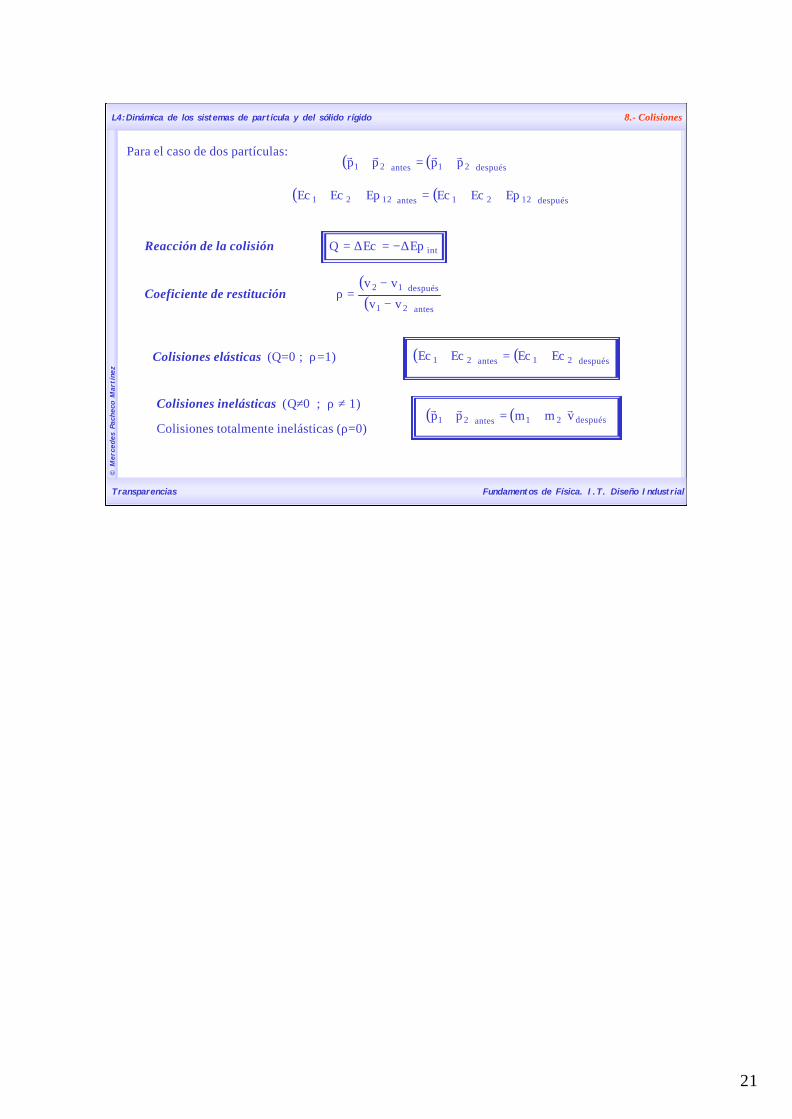
Coeficiente de restitución
Colisiones elásticas (Q=0 ; ρ=1)
Reacción de la colisión intEpEcQ ∆−=∆=
( )( )antes21
después12
vv
vv
−
−=ρ
( ) ( )después21antes21 EcEcEcEc +=+
Colisiones inelásticas (Q≠0 ; ρ ≠ 1)
Colisiones totalmente inelásticas (ρ=0)( ) ( ) después21antes21 vmmpp
rrr +=+
Para el caso de dos partículas:( ) ( )después21antes21 pppp
rrrr +=+
( ) ( )después1221antes1221 EpEcEcEpEcEc ++=++
© M
erce
des
Pach
eco
Mar
tíne
z
Transparencias Fundamentos de Física. I.T. Diseño Industrial