cenidet Luis... · 2014-02-14 · Descripción de la secuencia de arranque I de la UTG ... Control...
115
S.E.P. S.E.I.T. D.G.I.T. CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOL~GICO cenidet “DESARROLLO DE UN CONTROL PI NEURODIFUSO NO LINEAL DE DOS GRADOS DE LIBERTAD APLICADO AL CONTROL DE VELOCIDAD DE UNA UNIDAD TURBOGAS” T S I PARA OBTENER EL GRADO DE: MAESTRO EN CIENCIAS EN INGENIERÍA ELECTR~NICA P R E S E N T A : LUIS CASTELO CUEVAS DIRECTOR DE TESIS: DR. RAÚL GARDUÑO m h z CO-DIRECTOR: DR. ENRIQUE Q. MÁRMOL M.&RQ~z CENIDET .. . NOVIEMBRE 2004 CUERNAVACA, MOR.
Transcript of cenidet Luis... · 2014-02-14 · Descripción de la secuencia de arranque I de la UTG ... Control...

S.E.P. S.E.I.T. D.G.I.T.
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOL~GICO
cenidet
“DESARROLLO DE UN CONTROL PI NEURODIFUSO NO LINEAL DE DOS GRADOS DE LIBERTAD APLICADO AL CONTROL DE
VELOCIDAD DE UNA UNIDAD TURBOGAS”
T S I PARA OBTENER EL GRADO DE:
M A E S T R O E N C I E N C I A S
EN INGENIERÍA ELECTR~NICA
P R E S E N T A :
LUIS CASTELO CUEVAS
DIRECTOR DE TESIS: DR. RAÚL GARDUÑO m h z CO-DIRECTOR: DR. ENRIQUE Q. MÁRMOL M.&RQ~z CENIDET
.. .
NOVIEMBRE 2004 CUERNAVACA, MOR.

cenidet Centro Nacional de Investigación~ Sistema Nacional de Institutos Tecnol6gicos y Desarrollo Tecnol6gico
ANEXO No.11
ACEPTACI~N DEL DOCUMENTO DE TESIS M10
Cuernavaca, Mor., a I3 de octubre del 2004
C. Dr. Enrique Quintero-Mármol Márquez Jefe del departamento de Electrónica Presen te.
At’n C. Dr. Gerard0 V. Guerrero Ramírez Presidente de la Academia de Electrónica
Nos es grato comunicarle, que conforme a los lineamientos para la obtención del grado de Maestro en Ciencias de este Centro, y después de haber sometido a revisión académica la tesis titulada: “Desarrollo de un Control PI Neurodifuso no Lineal de Dos Grados de Libertad Aplicado al Control de Velocidad de una Unidad Turbogas”, realizada por el C. Luis Castelo Cuevas, y dirigida por el Dr. Raúl Gardufío Ramírez y Co-director Enrique Quintero Mármol Márquez y habiendo realizado las correcciones que le fueron indicadas, acordamos ACEPTAR el documento final de tesis, así mismo le solicitamos tenga a bien extender el correspondiente oficio de autorización de impresión.
Nombre y firma
.-7 1’’ ‘6. E. P.
Revisor Revisor Revisor
C.C.P. Subdirección Académica Departamento de Servicios Escolares Directores de tesis Estudiante
2 ~ m g m m Aicd&mIco, Reglamemo y Pmcedlmlento?i Aciaemlco-Aami~nlnilvos dc los pmgnmaa de Mantr l i en ~lenslllf del CENlDEl

cenidet Centro Nacional de Investigacibn y Desarrollo Tecnol6gico Sistema Nacional de Institutos Tecnológicos
ANEXO No. 12 M11
AUTORIZACI~N DE IMPRESI~N DE TESIS
Cuemavaca, Mor., a 8 de noviembre del 20004
Ing. Luis Castelo Cuevas Candidato al grado de Maestro en Ciencias en Ingeniería Electrónica Presente.
Después de haber atendido las indicaciones sugeridas por la Comisión Revisora de la Academia de Electrónica en relación a su trabajo de tesis cuyo titulo es: “Desarrollo de un Control PI Neurodifuso no Lineal de Dos Grados de Libertad Aplicado al Control de Velocidad de una Unidad Turbogas”, me es grato comunicarle que conforme a los lineamientos establecidos para la obtención del grado de Maestro en Ciencias en este centro se le concede la autorización para que proceda con la impresión de su tesis.
Atentamente
[//@p. o C. Dr. Enriaue Ouidero-Mármol Márauez . . Jefe del Departamento de Electrónica
C.C.P. Subdirección Académica Presidente de la Academia de Electrónica Departamento de Servicios Escolares Expediente
3 programa Acldemlco, Rqiimenio y PmcMimlenfoi Acddemlco.AdminbimtlVDr delos prngrama.de Maidd. inciencliSdclCENlDE1

. .
' ' DEDICATORIAS
A mi esposa
por tu amor, apoyo y comprensión.
Verónica Sosa Sánchez
A mis hijos
Mi fuerza para luchar y seguir adelante
Luis y Daniel Castelo Sosa
A mis padres
Gracias por su amor y por estar siempre conmigo
Mario Castelo Erazo
Esperanza Cuevas Cuevas
A mis hermanos
Por su cariño y sus palabras de aliento Rosalía, Elizabeth y Mario.
,

. . . . . . . . .
. . . . . . .
AGRADECIMIENTOS
A Dios, por brindarme la paz, la salud y la fuerza.
A Verónica, por estar conmigo, por tenerme paciencia y or apoyarme ara lograr esta meta.
A mis niños Luis y Daniel, lo mas grande que.me ha dado Dios.
A mis Padres, por su amor y palabras de aliento.
A mis hermanos, por su apoyo y comprensión.
A mis sobrinos, por su cariño y respecto.
A mis asesores Dr. Raúl Garduño Ramírez y Dr. Enrique Quintero Mármol Márquez, por confiar en mi y darme todo el apoyo, conocimientos y consejos.
A mis revisores, M.I. Marino Sánchez Parra, Dr. Marco Oliver Salazax y Dr. Víctor Alvarado Martinez, por sus observaciones y tiempo dedicado a la revisión de esta tesis.
A mis amigos, Salvador de Lara y Guadalupe Madrigal por compartir sus conocimientos y apoyo en los momentos dificiles.
A mis amigos de la maestría por hacer un gran equipo, Miguel Martinez, Miguel Vázquez, Agustín Espíndola, Amulfo Rodriguez, Víctor Segura, Neftali Reyes, Javier Lagunas y Miguel Cristín.
Al IE, por darme las facilidades y apoyo para realizar este trabajo.
Al Cenidet, por darme la oportunidad para seguir superándome profesionalmente.
A mis profesores del Cenidet, por brindarme sus conocimientos y permitirme terminar esta maestría.
A mis familiares y amigos, gracias por contar con su cariño y amistad.

RESUMEN
El Instituto de investigaciones Eléctricas ha desarrollado e implantado sistemas de control en
centrales con Unidades Turbogás (UTGs) y centrales de ciclo combinado, en las cuales se ha
detectado varias necesidades y oportunidades de desarrollo tecnológico. Una de las más
importantes es el mejoramiento de las estrategiak de control de velocidad, potencia y temperatura
de las UTGs a fin de obtener una operación mas segura y rentable. La razón principal se debe a
que estas unidades demandan un mayor número y estrictos requerimientos de control, ya que
estas unidades se caracterizan por operar a temperaturas, presiones y velocidades más altas que
las de otro tipo de unidades. Una alternativa atractiva para mejorar las estrategias de control de
las unidades turbogás es el empleo de otras estructuras de control y el uso de técnicas de control
con lógica difusa, las cuales pueden superar las desventajas del control convencional.
En este trabajo de tesis, se presenta el diseño y desarrollo de un controlador tipo PI
neurodifuso de dos grados de libertad (PI-ND2GL), que combina las técnicas de redes neuronales
y lógica difusa para el control de velocidad de una UTG, el cual puede ser aplicado sin impactar
negativamente el desempeño y la respuesta del proceso. El controlador PI neurodifuso se diseñó
mediante aprendizaje neuronal supervisado a partir de un conjunto de patrones de entrada y salida
determinados por el control convencional.
La evaluación del desempeño del controlador PI neurodifuso se realizó mediante pruebas de
simulación utilizando un modelo representativo de una unidad GE-5001. Se evaluó la no
estabilidad con simulaciones del sistema de control comparando los resultados contra el PI
convencional. De acuerdo a los resultados obtenidos de este trabajo de tesis, se concluye que el controlador PI neurodifuso de dos grados de libertad, proporciona más recursos que mejoran el
seguimiento a cambios en la referencia y el rechazo a perturbaciones. Además, al utilizar una
estructura de dos grados de libertad, permite sintonizar de forma independiente los controladores
sin afectar el seguimiento y/o el rechazo a perturbaciones. Al ser difuso permite que el controlador sea sintonizado en todo el rango de operación de velocidad de la unidad turbogás.
i

. . : . .. ,. . . . . .
ABSTRACT
The institute of Electrical Research has developed and has put in operation control systems in
centrals with Turbogas Units (TGUs) and in centrals of combined cycle, in which it has been
detected several necessities and opportunities of technological development. One of the most
important is the improvement on the strategies of speed control, power and temperature in TGUs
in order to obtain a safer and more profitable operation. The main reason is due to that these units
demand a bigger number and strict control requirements, since these units are characterized to
operate at temperatures, pressures and at high speeds that those of another type of units. An
attractive alternative to improve the strategies of control of TGUs is the employment of other
control structures and the use of technical of control with fuzzy logic, which can overcome the
disadvantages of conventional control.
In this thesis, presents the design and a two degrees of freedom neurofuzzy PI controller
development that combines the techniques of neuronal networks and fuzzy logic for the control
of speed of an TGU, which can be applied without a negative impac on the performance and on
the answer of the process. The neurofuzzy PI controller was designed by means of supervised
neuronal leaming starting from a group of input and output patterns determined by the
conventional control.
The performance evaluation of the neurofuzzy PI controller was carried out by means of
simulation tests using a representative model of a GE-5001 unit. The stability was evaluated with
simulations of the control system by comparing the results against the conventional PI. According to the obtained results of this work, it can be concluded that the neurofuzzy PI controller with two grades of freedom, provides more resources that improve the tracking of
changes in the reference and the rejection to perturbances . Also, when using a structure of two
degrees of freedom, it allows to syntonize in an independent way the controllers without affecting
the tracking and/or the rejection to perturbances. Because it is fuzzy, it allows that the controller can be syntonized in the whole operation speed range of the turhogas unit.
.. 11

. . . . . . . . . . . . . .....
CONTENIDO
2.1. 2.2. 2.3. 2.4.
2.4.1. 2.4.2. 2.4.3.
2.5.
I Descripción de la secuencia de arranque de la UTG (GE-5001): .............................. 12 Control convencional PID en turbinas de gas ........................................................... 15 Estructura de un sistema de Control de un grado de libertad .................................... 18 Control PI de dos grados de libertad (un punto de operación) .................................. 20
Estructura del PI-2GL ............................................................................................. 20 Caso de estudio con planta de pnmer orden ........................................................... 21 Caso de estudio con modelo de la TG .............................................................. 23
Necesidad de un controlador de mejor desempeno ................................................... 25
I
I
. I
P "' . I
3 . SISTEMAS NEURODIFUSOS .......................................................................................... I 26
Representación de un sistema difuso como una red neuronal ................................... 33 Estructura ANFIS ...................................................................................................... I 27 3.1.
3.2. 3.3. . . Método de aprendizaje ............................................................................................... 36
3.3.1 .. Propagacion ............................................................................................................ 36 3.3.2. Retropropagacion .................................................................................................. 38
Método de diseño (aprendizaje) ................................................................................ 45 CONTROL PI NEURODIFUSO DE DOS GRADOS DE LIBERTAD ......................... 47
Eventos críticos de la UTG a corregir por el controlador PI-ND2GL ....................... 47 Controlador PI-ND2GL (modificad&, discreto, todo el rango de operación) ............ 50
Discretización y ubicación de los SND .................................................................. 50
Sistema neurodifuso de la trayectka prealimentada (discretización 1) ................ 56 Sistema neurodifuso de la trayectdna prealimentada (discretización 2) ................ 57
I I I .I
.. . .
. . 3.4. 4 .
4.1. 4.2.
4.2.1. 4.2.2. 4.2.3. 4.2.4.
Sistemas neurodifusos de la trayectoria retroalimentada ....................................... 54
4.3. Procedimiento de implantación del Pk-ND2GL ........................................................ 58
... 111

. . . . . . . . . . . . ..... . . . . t. ...
. . . . . 1 . . . . . . . . .
4.3.1. Procedimiento de sustituciÓn.y mejora del desempeño .......................................... 59
4.3.3. Procedimiento de ajuste fino (manual) ................................................................... 62 4.3.4. Procedimiento de verificación (ajuste fino Óptimo) ............................................... 63
EXPERIMENTOS Y ANÁLISIS DE RESULTADOS .................................................... 66 Ambiente de Simulación y Pruebas e? PC: ............................................................... 66 Pruebas de arranque de UTG con el.qI-1GL convencional ....................................... 69
. Pruebas de arranque de UTG con el P -ND2GL ....................................................... 72 PI-ND2GL inicial con 7 funciones de membresía ................................................. 72
Pruebas de arranque de UGT con el Pf-ND2GL modificado .................................... 73 . Pruebas de arranque con el PI-ND2GL modificado (sintonización manual) ......... 73 Pruebas de arranque con el PI-ND2GL modificado (sintonización óptima) .......... 74
4.3.2. Diseño del PI-ND2GL I 60 ............................................................................................ I L
I I
5 . 5.1. 5.2. 5.3.
5.4. 5.3.1.
5.4.1. 5.4.2.
r I
5.5. 5.6.
Controlador PI-ND2GL seleccionado I ...................................................................... 75 Comparación del PI-convencional vs . pI-ND2GL modificado ................................. 77
Pruebas de cambio de parámetros de planta ........................................................... 86 5.6.1. 5.6.2.
Evaluación de la estabilidad del PI-ND2GL .......................................................... 79
6 CONCLUSIONES 91
I
. ............................................................................................................... I Conclusiones .............................................................................................................. I 91 6.1.
6.2. 6.3.
Aportaciones ........................................ ! ............................ ~ ........................................ 92 Sugerencias para trabajos futuros .............................................................................. 93 I
APENDICE A I 96 . Función de optimización ............................................................................ RESUMI? ..................................................................................................................................... I 1 O0
I
iv

. . . I " . ' . ..
Figura 1-1 Figura 2-1 Figura 2-2 Figura 2-3 Figura 2-4 Figura 2-5
Figura 2-6 Figura 2-7 Figura 2-8 Figura 2-9
..................... Sistema de control PI-ND2GL ........
I
: ....................................................... 8 I Elementos de un turbogenerador de combustión ....................................................... 11
Etapas y permisivos en el arranque de la UTG .......................................................... 13
Algoritmo de Control PID .......................................................................................... 15
Estrategia de control de una UTG .......... .................................................................. 16 Esquema de control de velocidad y potencia eléctrica de una UTG ......................... 17 Estructura de 1 grado de libertad ............................................................................... 18
(a) Respuesta-r del PID-IGL, (b) Respuesta-d del PID-IGL .................................... 19 Sistema de control de 2 grados de libertad ................................................................ 20 (a) Respuesta -r, y (b) respuesta-d del PID-2GL ...................................................... 22
................................................... Figura 2-10 Respuestas realizables con PID-IGL y PID.2GL 22
Figura 2-1 1 Controlador PI-IGL 23 ................................................................................................. Figura 2-12 Controlador PI-2GL ................................................................................................. 24
Figura 2-13 (a) Arranque de la UTG con el PI-IGL, (b) Arranque de la UTG con el PI-2GL ... 24
Figiira 2-14 (a) Acercamiento en zona salida motor, (b) Zona de cierre válvulas sangrado ..... 25 Figura 2-1 5 Controlador PI-ND2GL propuesto .......... ~ ............................................................... 25
Figura 3-1 Red adaptiva prealimentada en representación por capas ......................................... 28 Figura 3-2 (a) Nodo simple, (b) Parámetro compartido .............................................................. 29
Figura 3-3 Red adaptiva recurrente ............................................................................................. 29 Figura 3-4 Modelo Difuso Sugeno de orden 1 con dos entradas y dos reglas ........ ; ................... 30
Figura 3-5 Arquitectura ANFIS equivalente al sistema difuso Sugeno de orden 1 .................... 30
Figura 3-6 Función de membresia tipo triangular con puntos a, b, c .......................................... 32 Figura 3-7 Representación del sistema difuso por medio de una red neuronal ........................... 34 Figura 3-8 Conjuntos difusos de las entradas e y Ae ................................................................... 34 Figura 3-9 Propagación de la red (4-4-4-4-1) .............................................................................. 36 Figura 3-10 Retropropagación de la red (4-4-4-4-1) ................................................................... 39 Figura 3-1 1 Relacion causal ........................................................................................................ 39 Figura 3-12 Denvada ordenada y derivada parcial ordinaria ...................................................... 40 Figura 3-13 Procedimiento de aprendizaje .................................................................................. 46 Figura 4-1 Secuencia de arranque de la turbogás GE-5001 ........................................................ 49
..
V

Figura 4-2
Figura 4-3
Figura 4-4 Figura 4-5
Figura 4-6
Figura 4-7
FiBIM Figura 4-9
Figura 4- I O Figura 4-1 1
Figura 4- 12 Figura 4- 1 3
Figura 4-14
Figura 4- 1 5 Figura 4-1 6
Figura 4-1 7
Figura 4-18
Figura 4-19
Figura 4-20
Figura 4-21
Figura 4-22
Figura 4-23
. . .. . Estructura de control propuesta .:, . .
50 51
........................ 52
...................... ........................................
discreta1 del PI-2GL'convencion?i ... .. .. . . . . . . . . . . . . . . . . . . . . , . . . . . . . . . . . . . . . . . . . . , . . , . , ., , . , . , P1-ND2GL con dimetización i ... : ................................
P1-m2GL con discretización 2 .,,l,,,,, Versión discreta2 mejorada del p 1 - 2 ~ ~
. . . . . . . . . . . . . . . . . . . . . . . . . . . . """""""""", \\ 11 \Ill .................................... ...:....... 54
....... i ......... !
I Red adaptiva de a re e......... 54
Sistema difuso K; con 5 FM triangulares ................................................................... 55
P , Q@ E, Y Capas ...... ... .:.. .. .... ... .... . . . . . . . . . . . . . . . . . . . . . . . . . , , , , , , ........................................................... 55 bistema difuso Ki ....................... ..... . ..... . .,,,,,,<,
Sistema difuso Kp.. ......................... .......................................................................... 56
Sistema difuso Kp con 5 FM triangulares ................................................................ 56
Sistema difuso Kff con 5 FM triangulares ................. ... ............ ....... ............. ... ...... ... 57
Sistema difuso Kff con 5 FM triangulares ................................................................ 57 Procedimiento de diseño del PI-ND2GL ................................................................. 58 Estructura del control PI-ND2GL en Sirnulink ....................................................... 59
(a) Sistema difuso Kff , (b) Sistemas difusos Ki y Kp .............................................. 59
(a) importación de patrones de datos, (b) Sistema entrenado .................................. 60
(a) Sistema difuso generado, (b) Activación de reglas del SD ................................ 61
(a) Mapeo del SD generado, (b) base de reglas del SD ........................................... 61
(a) Mapeo original del SD, o>) Mapeo modificado ................................................. 62
Procedimiento de alteración de mapeos de forma manual ............................... ....... 63
Sistema difuso K f f ........ ...:.. ... ...... ... ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . , , . . . , . , . . . , , . . . . , , . , , , , 5 6
Sistema difuso Kff- ... ... s..... ... .... : .... .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
, .
Figura 4-24 Procedimiento de optimización sin restricciones ..................................................... 64
Figura 4-25 Procedimiento de optimización con restricciones .... ............................................... 65
Figura 5-1 Figura 5-2 Figura 5-3 Figura 5-4
Figura 5-5
Figura 5-6
67 (a) Software de Matlab, (b) Software de Sirnulink. .................................................. Modelo de la UTG GE-5001 ..................................................................................... 68
68
(a) Sistema difuso Ke, (b) Sistemas difusos Ki y Kp ................................................ 69 70 71 71
Estructura del control PI-ND2GL .............................................................................. . .
Controlador PI-IGL convencional ............................................................. .. .... ......-.

...... . . . . . . . . . . . ....... I:: ~~ ~ - ..
Figura 5-34 (a) Acercamiento de la
Figura 5-10 (a) Arranque de UTG con PI-ND2 Figura 5-1 1 (a) Señal de control. (b) TGE.y P
Figura 5-12 (a) Arranque de UTG con PI-ND
odificado. (b) Error y cambio del error ... 74
.................................................................. 14
di.ficado, (b) Error y cambio del error ... 75 ............................................................... 75
.............................................................. 76
.............................................................. 76
.............................................................. 77
Figura 5-13 (a) Señal de control, (b) TGE y P
Figura 5-14 Sistema difuso Kp ....................... Figura 5-15 Sistema difuso Ki ........................ Figura 5-16 Sistema difuso Kff ................ : ...... Figura 5-17 (a) Comparación del desempeño Figura 5-18 (a) Acercamiento zona de moto Figura 5-19 (a) Comparación de señal de
Figura 5-20 (a) Comparación de la TGE, Figura 5-21 (a) Respuesta del PI vs . PI-
Figura 5-23 (a) Señal de control sin di
Figura 5-24 (a) Respuesta del PI vs . P
Figura 5-26 (a) Señal de control sin Figura 5-27 (a) Respuesta del PI vs . Figura 5-28 (a) Acercamiento de
1 PI-ND2GL, (b) Señal de control ....... 78 e, (b) Cierre válvulas de sangrado; .... 78
n de la PDC ...................................... 79 camiento de la zona del disturbio .... 80 o, @) TGE ...................................... 81 control con disturbio ..................... 81
amiento de la zona del disturbio .... 82
do, (b) TGE ................................. 82 ntrol con disturbio ..................... 83 iento de zona de disturbio ......... 83 o, (b) TGE ................................. 84
paración del cambio del error ........ 1 .. 79
Figura 5-22 (a) Acercamiento en zona
Figura 5-25 (a) Acercamiento en zo
Figura 5-29 (a) Señal de control trol con disturbio ..................... 84
Figura 5-30 (a) Respuesta del PI nto en zona de disturbio ......... 85 Figura 5-31 (a) Acercamiento d (b) TGE ................................. 85 Figura 5-32 (a) Señal de contro 1 con disturbio ..................... 86
de sangrado, (b) TGE .............................. 87

Figura 5-10 Figura 5-1 1 Figura 5-12 Figura 5-13 Figura 5-14 Figura 5-15 Figura 5-16 Figura 5-17 Figura 5-18 Figura 5-19
Figura 5-20 Figura 5-21 Figura 5-22 Figura 5-23 Figura 5-24 Figura 5-25
Figura 5-26
Figura 5-27 Figura 5-28
Figura 5-29 Figura 5-30 Figura 5-3 1 Figura 5-32 Figura 5-33 Figura 5-34 Figura 5-35 Figura 5-36 Figura 5-37 Figura 5-38
(a) Arranque de UTG con PI-ND2GL modificado. (b) Error y cambio del error ... 74 (a) Señal de control. (b) TGE y PDC ............. : ......................... 1 ............................... 74 (a) Arranque de UTG con PI-M2GL modificado. (b) Error y cambio del error ... 75 (a) Señal de control. (b) TGE y PDC ....................... I. .............................................. 75 Sistema difuso Kp ................................. ................................................................... 76 Sistema difuso Ki ............................... : ..................................................................... 76 Sistema difuso Kff .................................................................................................... 77 (a) Comparación del desempeño del PI y el PI-ND2GL, (b) Señal de control ....... 78 (a) Acercamiento zona de motor de arranque, (b) Cierre válvulas de sangrado ..... 78 (a) Comparación de señal de error, (b) Comparación del cambio del error ........... 79
(a) Comparación de la TGE, (b) Comparación de la PDC ...................................... 79 (a) Respuesta del PI vs . PI-ND2GL, (b) Acercamiento de la zona del disturbio .... 80 (a) Acercamiento en zona de válvulas sangrado, (b) TGÉ ...................................... 81
(a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 81 (a) Respuesta del PI vs . PI-ND2GL, (b) Acercamiento de la zona del disturbio .... 82
(a) Acercamiento en zona de válvulas de sangrado, (b) TGE ................................. 82 (a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 83 (a) Respuesta del PI vs . PI-ND2GL, (b) Acercamiento de zona de disturbio ......... 83 (a) Acercamiento de zona de válvulas'de sangrado, (b) TGE ................................. 84
(a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 84
(a) Acercamiento de zona de válvulas de sangrado, (b) TGE ................................. 85 (a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 86 (a) Respuesta del PI vs . PI-ND2GL, (b) Comparación de señales de control ......... 87 (a) Acercamiento de la zona de válvulas de sangrado, (b) TGE .............................. 87 (a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 88
(a) Respuesta del PI vs . PI-ND2GL, (b) Acercaniiento de la zona del disturbio .... 88 (a) Acercamiento en zona de válvulas de sangrado, (b) TGE ................................. 89 (a) Señal de control sin disturbio, (b) Señal de control con disturbio ..................... 89
(a) Respuesta del PI vs . PI-ND2GL, (b) Acercamiento en zona de disturbio ......... 85
vii
. .

. . . . . . . . . . . .
LISTA ;E TABLAS
h . 49
i ........................................................................... Tabla 4-1
Tabla 4-2 Base de reglas del sistema difuso 1 Tabla 5-1 Resumen de pruebas de diseño del Tabla 5-2 Resumen de pruebas del PI convei Tabla 6-1 Opciones de optimización optims
Requerimientos de control ............
-iVD2GL .......................................................... 76 mal vs. el PI-ND2GL ...................................... 90 ] .................... ; ................................................... 99
viii

Cambio en el error índice del cuadrado del Función de membresía Función de transferencia Feed forward Feedback General Electric 5001
ANFIS
ccc c-error EC FM FT FF FB GE-5001 IHM IIE IAE KP K, Kf Mw Ii. PI-1GL PI-ND2GL PI-ND2GL-NL P PI PID PC PDC rps rpm ref sc SCD-DB SCD-GP SND SD Ti Td TGE TSK Uff Ufi UTG vel
esfuerzo de control acumulado
ix

Capítulo 1 Introducción
CAPÍTULO 1
En este capítulo se presenta un panorama general del contexto que motivó el tema de tesis.
Destaca el problema que liga una necesidad tecnológica, en la cual, se propone solucionarla por
medio del diseño de un controlador PI neurodifuso de dos grados de libertad. La Sección 1.1
describe el marco en el cual se desarrolla el trabajo de investigación, indicando los trabajos
anteriores que se relacionan con el trabajo de tesis. En la Sección 1.2 es identificado el problema
tecnológico por resolver, que consiste en desarrollar un controlador neurodifuso de dos grados de
libertad que mejore la calidad de control de velocidad en el manque de una unidad turbogás. En
la Sección 1.3 se define el objetivo y alcance del proyecto de investigación, con lo que se indica
el rumbo y la profundidad que se atacará para resolverlo. La Sección 1.4 indica el producto
obtenido que es un controlador neurodifuso de dos grados de libertad no lineal de alto desempeño
que combina técnicas de redes neuronales y lógica difusa.. La Sección 1.5 muestra la organización de la tesis desde el punto de vista de la metodología empleada para el desarrollo del
trabajo de investigación.
1. INTRODUCCI~N
1.1. Antecedentes
Desde el inicio de su desarrollo práctico a principios de los años ~ O ' S , las turbinas de gas han sido máquinas motrices básicas de la industria moderna, tanto para la generación de energía
eléctrica como en otras aplicaciones industriales. Por otra parte, la industria productora de turbinas de gas representa un núcleo avanzado dentro de las industrias mecánicas en cuanto al
estado de su tecnología, diseño, materiales y fabricación. La utilización de la turbina de gas se debe a su simplicidad operativa, su relación potencia-peso y su eficiencia, lo que ha permitido
1
Introducción Capítulo 1
rápidos desarrollos en varios campos como el del'transporte marítimo donde ha desplazado en
forma significativa a los grandes motores diesel; en el transporte aéreo donde prácticamente no
tiene competencia; y en la generación de energía eléctrica donde .forma parte importante de la
producción nacional y mundial. En la industria, la aplicación de las turbinas de gas está muy
extendida, por ejemplo existen aplicaciones como impulsores de bombas, compresores, y
generadores (comúnmente llamadas turbomáquinas) en la industria de refinación, química,
petroquímica, azúcar, papel y celulosa, además de plantas metalúrgicas y siderúrgicas.
Una tendencia tecnológica de creciente aceptación'intemacional durante la segunda mitad de
la década de los años 90's y el nuevo milenio es la generación de energía eléctrica basada en
centrales de ciclo combinado y de cogeneración para aumentar la rentabilidad en la
transformación de energía eléctrica. Las centrales de ciclo combinado (CCCs) basadas en
unidades turbogás (UTGs) se están convirtiendo en el modo dominante de la generación eléctrica.
Esto es atribuible al menor costo de instalación por kilowatt generado, programas de construcción
más cortos, bajos niveles de emisión, costos de operación competitivos y mejores eficiencias
térmicas de las unidades [Sánchez, et al., 20011. En el marco de la política del gobierno
Mexicano federal, la Secretaría de Energía informó la prospectiva para la generación eléctrica
para el periodo 2001-2010, en la cual se indican los proyectos de construcción, adjudicación,
licitación y concurso de nuevas plantas de generación, entre las que destacan las CCCs las cuales
contienen UTGs [Prospectiva del Sector Eléctrico, 20011.
Debido a lo anterior, los requerimientos de confiabilidad de las UTGs para entrar en servicio
sin falla cuando se necesitan, se han incrementando notablemente. La realización frecuente de
arranques, sincronizaciones, tomas de carga y paros de manera exitosa y en forma automática depende fuertemente de las capacidades del sistema de control. Durante el arranque la tarea
principal del sistema de control consiste en acelerar a la unidad desde la velocidad de tomaflecha
hasta la velocidad nominal conforme a un patrón de aceleración predefinido. La estrategia del
control de velocidad debe acelerar la unidad de una manera segura evitando la ocurrencia de inestabilidades del fluido de trabajo (surge), altas vibraciones y resonancia, altas temperaturas e inestabilidades de combustión, a fin de lograr arranques en el mínimo de tiempo, ahorro de
combustible y preservando la vida útil de la unidad [Castelo, et al., 20041.
2

Capítulo 1 Introducción
Los sistemas de control actuales para UTGs contienen lazos de control de velocidad
retroalimentados de una entrada y una salida basados en algoritmos de control convencionales del
tipo PI o PID, implementados con tecnología electrónica analógica o digital, tal es el caso del
control PACE 260 de Westinghouse [Uram, 19761, el control Speedtronic Mark V de GE [Miller,
et al., 20041. En la Gerencia de Control e Instrumentación del Instituto de Investigaciones
Eléctricas (IIE) se tiene una línea de desarrollo de tecnología de control para unidades
generadoras. En los Últimos años se han desarrollado y puesto en servicio varios sistemas de
control. Se cuenta con una plataforma de tipo industrial para el desarrollo experimental de
sistemas de control avanzados para UTGs [Castelo, et al., 20021.
La actual demanda de energía eléctrica obliga al sector eléctrico del país a estar en una
búsqueda constante de métodos y sistemas que entre otros objetivos mejoren la operación de
centrales generadoras. Como parte de su misión, el LIE promueve y apoya la investigación
aplicada y el desarrollo tecnológico a fin de mejorar la seguridad, disponibilidad, confiabilidad,
eficiencia y durabilidad de las unidades en las centrales generadoras. Uno de sus principales
cursos de acción ha sido el desarrollo e implementación de sistemas digitales de información y
control para elevar los niveles de automatización en la operación de centrales generadoras de
energía eléctrica.
La Gerencia de Control e instrumentación del IIE, se ha dedicado al desarrollo de proyectos de
modernización de sistemas de control en Centrales Generadoras en lo que destacan los Sistemas
de Control Distribuido de las Centrales de Ciclo Combinado de Dos Bocas Ver;(SCD-DB)
[Delgadillo, et al., 19901 y Gómez Palacio,Dgo; (SCD-GP). [Diaz, et al., 19931. La realización de estos proyectos fue motivada principalmente por los excesivos problemas de operación y
mantenimiento causados por el envejecimiento de componentes y la carencia de partes de
repuesto [Chávez, et al., 19951. Los sistemas desarrollados constituyen eventos pioneros en
México en cuanto a la creación de tecnología de sistemas de control para procesos de gran escala;
especialmente el SCD-GP que es un sistema completamente digital de alcance total, y de gran impacto económico para una de las zonas industriales más importantes y estratégicas en el norte
del país. Durante el desarrollo e implantación del SCD-GP, se detectaron varias necesidades y
3

Capitulo 1 introducción
oportunidades de desarrollo tecnológico. Entre las más importantes y apremiantes se tiene el
mejoramiento de las estrategias de control de potencia, velocidad y temperatura de las unidades
turbogás [Garduño, et al., 19951.
En 1993 se inició el desarrollo de controladores difusos para UTGs [Garcia, 19971, en donde
se rediseñó la programación del sistema de control de las UTGs del SCD-GP y se incorporó un
controlador difuso de velocidad en tiempo real para el arranque de la UTG [García, 19971
[Garcia, et al., 19971. Posteriormente, este trabajo fue continuado y extendido para abarcar el
control de potencia generada [Pat, et al., 19991 [Ramírez, 19961. En ambos casos los resultados
obtenidos fueron exitosos y constituyen una base sólida para la aplicación de controladores
difusos a una UTG real. Sin embargo, desde un principio fue patente la dificultad para obtener la
base de reglas y los parámetros de los diversos elementos del sistema de inferencia difuso
embebido en el controlador. Para solucionar esta problemática y automatizar lo mas posible el
diseño del sistema de inferencia difuso, se inició el desarrollo de un sistema de sintonización
basado en redes neuronales, el cual primeramente se aplicó a controladores PI convencionales
[Pat, et al., 19991, y en una segunda etapa a la sintonización de un controlador difuso [Sánchez, et
al., 19991. El enfoque de este último trabajo consistió en desarrollar un sistema que proporcionara
los parámetros que definen las variables lingüísticas del controlador usando un algoritmo de
aprendizaje de redes neuronales. El conjunto formado por la red neuronal y el sistema difuso del
controlador es un sistema de tipo cooperativo en donde ambos componentes son aplicaciones
independientes; la red neuronal le comunica los resultados del aprendizaje al sistema difuso.
Como trabajo de investigación más reciente se encuentra [Carretero, 20021 el cual desarrolló
un controlador prealimentado neurodifuso tipo ANFIS para una UTG, y [Villagrán, 20031 cuyo
trabajo consistió en el desarrollo de un controlador híbrido neurodífuso tipo PI para una UTG .
Con los resultados obtenidos hasta la fecha, aun no se cuenta con un método de sintonización
práctico y confiable que facilite la aplicación real de los controladores difusos. La solución de este problema es un tópico de investigación de gran interés que se justifica por los beneficios
técnicos y económicos que se obtendrían con su solución.
4

Capítulo 1 introducción
1.2. Necesidad Tecnológica.
Las UTGs se caracterizan por operar a temperaturas, presiones y velocidades relativamente
más altas que las de cualquier otro tipo de unidades, lo cual se traduce en mayores y mas estrictos
requerimientos para el sistema de control a fin de obtener una operación segura y rentable.
Actualmente, los sistemas de control de unidades turbogas están basados en algoritmos de control
convencionales del tipo proporcional e integral (PI).
Los lazos de control de las UTGs emplean algoritmos de control PI convencionales. La
idoneidad de estos controladores para tareas de regulación en un punto de operación determinado
ha sido ampliamente demostrada. Sin embargo, su 'uso para el control de velocidad durante el
arranque o para el control de potencia en todo el rango de generación es cuestionable, debido a
que el desempeño de la unidad puede ser afectado adversamente por los cambios en la dinámica
del proceso que varia en forma no lineal conforme cambia el punto de operación.
A pesar de esto, el uso de los controladores PI convencionales se ha prolongado por mucho
tiempo debido principalmente a su sencillez y a que estrictamente no se requiere de un modelo
matemático del proceso para diseñarlos y ajustarlos. La importancia de este último hecho no debe
menospreciarse, ya que la dificultad de contar con modelos matemáticos precisos es una de las
causas fundamentales para que no se haya generalizado la aplicación de estrategias de control
moderno, las cuales podrían satisfacer requerimientos de operación más sofisticados que con el control convencional.
Durante el arranque de la UTG, existen eventos que son vistos por el control como perturbaciones. Además la curva de referencia (aceleración) se compone de segmentos con varios
cambios de pendiente en la curva, por lo tanto, existen desviaciones de la velocidad hacia la referencia. Debido a esto, es necesario contar con controladores más eficientes que proporcionen mas recursos de desempeño para el seguimiento y rechazo a perturbaciones, para los cuales, el
controlador PI convencional tiene menor desempeño.
il 5

Introducción Capítulo 1
El control PI convencional de un grado de libertad (PI-1GL) no proporciona los recursos suficientes para resolver las necesidades de control en el arranque de la UTG. Este tipo de PI
convencional:
> No es sintonizable para seguimiento y rechazo a perturbaciones
> Es sintonizable para un solo punto del rango de operación del arranque de la UTG
> Es dificil de sintonizar óptimamente en la práctica
P No proporciona suficientes recursos de control
Debido a lo anterior, se propone un controlador tipo PI neurodifuso de dos grados de libertad
(PI-ND2GL) que proporcione más recursos para mejorar la calidad del control de velocidad de la
UTG. Este tipo de controlador proporciona:
o Una mejor sintonización para el seguimiento y rechazo de perturbaciones de manera
independiente
o Es más sencillo de sintonizar en la práctica
o Es sintonizable en todo el rango de operación del arranque de la UTG
o Una sintonización de forma manual garantizada cercana al óptimo
o Los diseños de los sistemas neurodifusos (SND) se pueden automatizar
1.3. Objetivo y alcance
El objetivo del trabajo de investigación consiste en desarrollar un controlador PI neurodifuso de dos grados de libertad que mejore la calidad del control de la velocidad de una unidad turbogás durante la fase de arranque, con respecto a la obtenida con un controlador PI convencional. El primer grado de libertad será proporcionado por un controlador neurodifuso que
implementa un lazo cerrado de control retroalimentado. El segundo grado de libertad será
proporcionado por un controlador neurodifuso que implementa un lazo abierto de control con prealimentación de la señal de referencia de velocidad.
6

. . ~. .
. -
Capítulo 1
Introducción :
' sintetizar en un solo dispositivo de control el esquema de control neurodifuso
retroprealimentado formado por dos trayectorias de control con un controlador
independiente en cada una de ellas.
Formular y realizar sistemas de inferencia difusos, lo más simple posibles, que faciliten la incorporación del conocimiento operacional experto para mejorar la
respuesta de la UTG durante la fase de arranque.
Implementar un método para modificar cuantitativamente la forma de los mapeos
estáticos de los sistemas de inferencia difusos.
Programar todo el desarrollo en el ambiente de MatlablSimulink en una plataforma de
computadora personal usando el modelo matemático de una unidad turbogás GE-5001.
O Evaluar y comparar el desempeño del controlador PI neurodifuso de dos grados de
libertad contra el PI convencional.
O Desarrollo en tiempo discreto para futura impiementación en sistema digital. I
\
$ ~ Los trabajos que no están incluidos en el alcance de esta tesis son:
9 0 El análisis de estabilidad en forma analítica, para validar esto, se realizarán pruebas de
simulación que mostrarán que el sistema es estable.
o El análisis de la robustez del desempeño del sistema.
n Generar y validar el modelo matemático de la unidad turbogás GE-5001.
O Evaluar diferentes paquetes o utilenas para el diseño de sistemas neurodifusos. Se
de los sistemas difusos del controlador. n Evaluar diferentes métodos de optimización para realizar los cambios a la superficie
(sábana) de control.
. .- ... . -. --- .. . .
Capítulo 1 Introducción
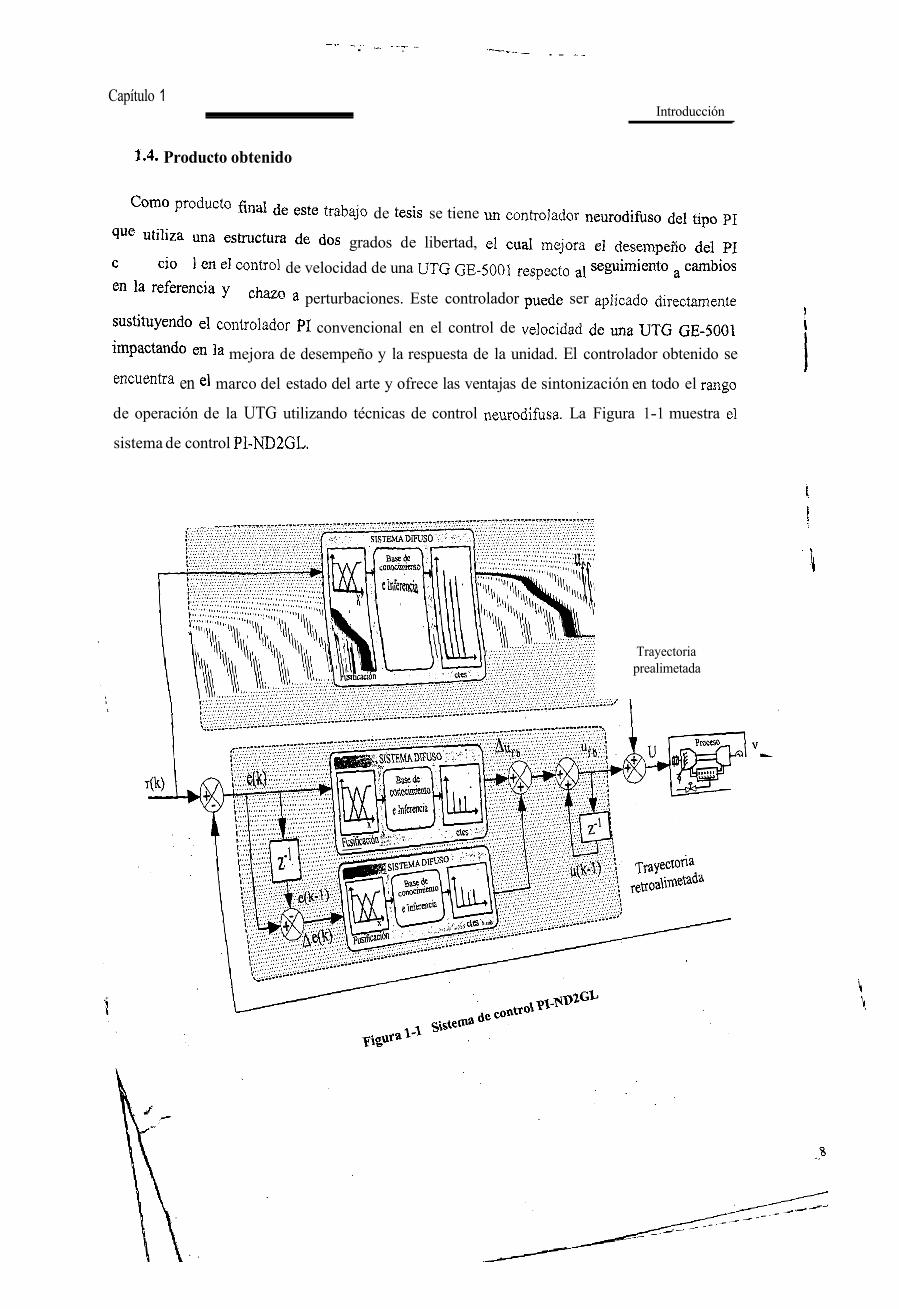
1.4. Producto obtenido
'Om0 Producto de este trabajo de tesis se tiene un controlador neurodifuso del tipo pI
una estnictura de dos grados de libertad, el cual mejora el desempeño del PI
en la referencia y a perturbaciones. Este controlador p u d e ser aplicado directamente
sustituyendo el controlador PI convencional en el control de velocidad de m a UTG GE-5001 impactando en la mejora de desempeño y la respuesta de la unidad. El controlador obtenido se
encuentra en el marco del estado del arte y ofrece las ventajas de sintonización en todo el rango
de operación de la UTG utilizando técnicas de control neurodifusa. La Figura 1-1 muestra el
sistema de control PI-ND2GL.
que
en el control de velocidad de una UTG GE-5001 respecto al a
i i 1 ' i
Trayectoria prealimetada
i 'i

Capítulo 1
1.5. Organización de la Tesis
La tesis está compuesta Por seis Capítulos, 10s cuales se componen cada uno de un encabezado
0 resumen Y SUS respectivos subcapítulos O contenido. Cada encabezado muestra un resumen de
10 que trata el correspondiente Capítulo. El Capítulo 1 introduce las generalidades relacionadas con el tema de tesis, la necesidad que motivó a abordar la investigación, el objetivo de la tesis
con SUS alcances correspondientes y las aportaciones que se generan para trabajos futuros. ~1 Capítulos 2, describe la secuencia o fases del arranque de una UTG GE-5001. Se muestra la
estratega de control convencional utilizando algoritmo del tipo PI en UTGs y las limitantes que
tiene la estructura de control de un grado de libertad. El Capítulo 3 presenta generalidades de
sistemas neurodifusos enfocando principalmente el modelo M I S , muestra la representación de
un sistema difuso como una red neuronal indicando análisis del método de aprendizaje como es la
propagación y retropropagación. El Capítulo 4, muestra el diseño del PI-ND2GL. indica los
eventos cnticos de la UTG que se presentan durante el arranque y que se traducen como
requerimientos a corregir por el sistema de control. Presenta las ventajas de utilizar la estructura
de dos grados de libertad mediante un caso de estudio de una planta de primer orden y la UTG.
Indica la discretización y generación de los SND en las trayectorias prealimentada Y
retroalimentada. Finalmente el procedimiento de implantación del PI-NJXGL que contiene un
procedimiento fino de sintonización manual y el correspondiente procedimiento de sintonización
fino automatizado, El Capítulo 5 , presenta la evaluación y COmpXaciÓn del desempeño (no
estabilidades) de 10s controladores PI convencional y PI-ND2GL. El Capítulo 6 las
conclusiones que aporta este trabajo de tesis.

Capítulo 2 Control convencional de UTG’s
CAPÍTULO 2
CONTROL CONVENCIONAL DE UTG’S
En este capítulo se presentan las características relevantes de sistemas de control de unidades
turbogas, además, describe de forma detallada las etapas en la secuencia de arranque de una UTG incluyendo una descripción del control de velocidad que se basa en un algoritmo PI
convencional. La Sección 2.1 detalla los eventos críticos que intervienen en la etapa de
aceleración de la UTG y que son vistos por el control como perturbaciones. La Sección 2.2
describe la estrategia general de control convencional simplificada que utilizan las UTG’s. La
Sección 2.3 muestra las características de desempeño de la estructura de control de un grado de
libertad utilizando un caso de estudio de una planta de primer orden. La Sección 2.4 presenta la
estructura de control de dos grados de libertad, se presenta un caso de estudio de una planta de
primer orden y el modelo de la UTG. La Sección 2.5 plantea la necesidad de un mejor
controlador de acuerdo a la justificación con el caso de estudio de primer orden mostrado en las
Secciones 2.3 y 2.4 que mejore el desempeño en el arranque de la UTG.
2. CONTROL CONVENCIONAL. DE UTG’s
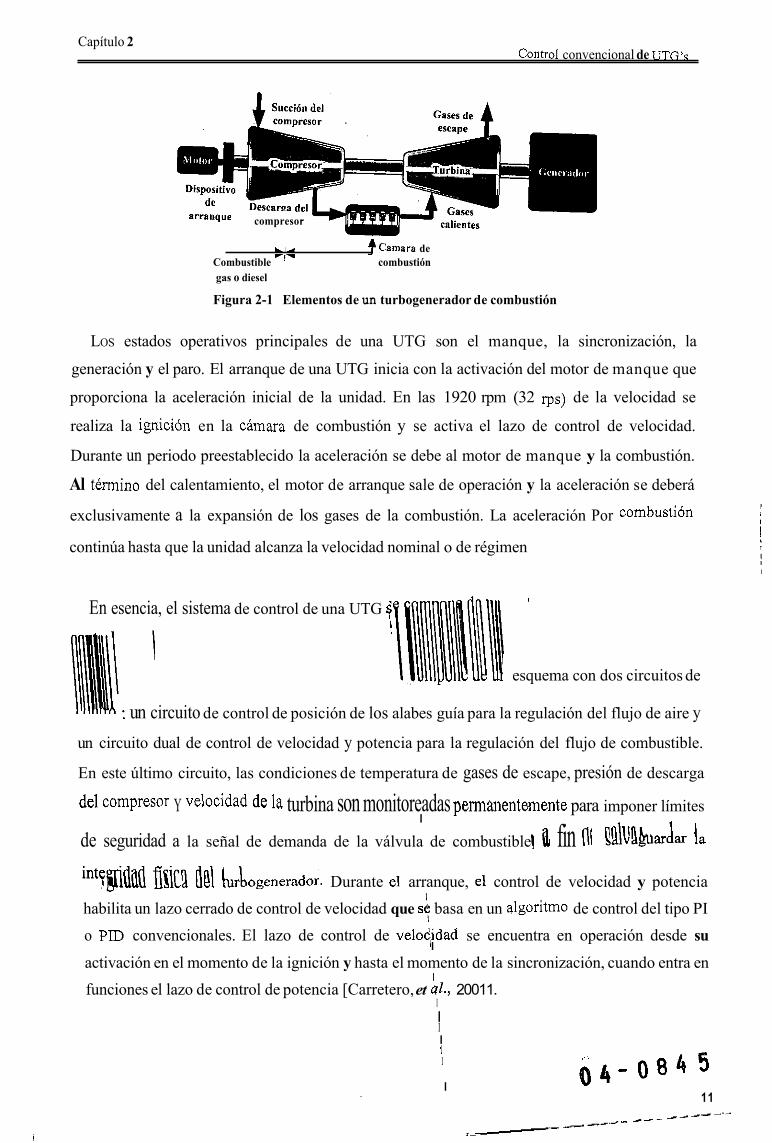
Una UTG consta de cinco componentes principales que operan de manera simultánea y
continua para producir energía eléctrica (Figura 2-1). El dispositivo de arranque es un motor
eléctrico que proporciona la energía inicial para mover la UTG, el compresor succiona el aire atmosférico y lo comprime para luego dirigirlo a la cámara de combustión. En la cámara, el aire a
presión se mezcla con el combustible y se queman para producir los gases calientes que pasan a través de las tobera donde se expanden y producen trabajo sobre la turbina. Finalmente, los
gases de la combustión salen a la atmósfera. La energía mecánica rotatoria producida se transmite ai generador eléctrico que la transforma en energía eléctrica y la suministra a la red eléctrica.
10
Capítulo 2 Control convencional de UTG's
arranque compresor
L 1 t c a m a r a de c . w
Combustible ~ combustión gas o diesel
Figura 2-1 Elementos de un turbogenerador de combustión
LOS estados operativos principales de una UTG son el manque, la sincronización, la
generación y el paro. El arranque de una UTG inicia con la activación del motor de manque que
proporciona la aceleración inicial de la unidad. En las 1920 rpm (32 rps) de la velocidad se
realiza la ignición en la cámara de combustión y se activa el lazo de control de velocidad.
Durante un periodo preestablecido la aceleración se debe al motor de manque y la combustión.
Al termino del calentamiento, el motor de arranque sale de operación y la aceleración se deberá
exclusivamente a la expansión de los gases de la combustión. La aceleración Por combustión
continúa hasta que la unidad alcanza la velocidad nominal o de régimen
En esencia, el sistema de control de una UTG 7
esquema con dos circuitos de
: un circuito de control de posición de los alabes guía para la regulación del flujo de aire y un circuito dual de control de velocidad y potencia para la regulación del flujo de combustible.
En este último circuito, las condiciones de temperatura de gases de escape, presión de descarga
del compresor Y velocidad de la turbina son monitoreadas permanentemente para imponer límites I
de seguridad a la señal de demanda de la válvula de combustible J 4 fin !!iu!hdw la interndid fisic! del LLogenerador. Durante el arranque, el control de velocidad y potencia habilita un lazo cerrado de control de velocidad que s i basa en un algonmio de control del tipo PI
o PID convencionales. El lazo de control de velocjdad se encuentra en operación desde su
activación en el momento de la ignición y hasta el momento de la sincronización, cuando entra en funciones el lazo de control de potencia [Carretero, et Al., I 20011.
I
I I I I 1 I
I 0 4 - 0 8 4 5
11
i

Capítulo 2 control convencional de UTG's
I 2.1. Descripción de la secuencia de arranque de ]a UTG (GE-5001)
El objetivo de la secuencia de arranque e& el de conducir y supervisar a la unidad desde la
velocidad cero hasta la velocidad de sincrodismo cumpliendo estrictamente con una sene de
permisivos y estados necesarios. El sistema ide control establece un penodo de purga de una
I I
1
duración suficiente para eliminar cualquier residuo I . modo automático o manual el arranque. Para I llevar a cabo un arranque normal de la UTG se
deben realizar automáticamente una sene de eventos I
I 1
de combustible antes de poder realizar en
que se requieren antes de que la unidad I
alcance la velocidad de sincronismo. Estos kventos se deben cumplir cada uno de forma I satisfactoria y son los siguientes:
I 1. Restablecimiento de disparos
2. Selección y suministro de combustible 1 I
3. Encendido de motor o dispositivo de arranque I
I I
4. Ignición I 5. Generación de flama e inicio de rampa de aceleración 1920 rpm (32 rps)
6. Combustión
7. Salida del motor de arranque 2160 rpm (361~s)
8. Aceleración de la turbina hasta la velocidad de 4920 rpm (82 rps), cierre de válvulas de
I I
I
sangrado y apertura de alabes guía. t
9. Aceleración de la turbina hasta la velocidad'de sincronismo 5100 rpm (85 ips)
Durante la secuencia de arranque normal, el¡ control debe fijar un flujo y presión de
combustible adecuado para la cámara de combustión y evitar una aceleración rápida y una fatiga
térmica de la turbina. El arranque inicia cuando el operador oprime el botón de arranque, entonces la UTG es impulsada por el trabajo del motor eléctrico hasta que alcanza la velocidad mínima de ignición, entonces, se lleva a cabo la ignición por medio de las bujías en la cámara de
combustión y se establece la demanda a la válvu? de combustible. De resultar exitosa la ignición, se establece flama en la cámara y el controllgenera la demanda mínima de la válvula de
combustible para un periodo de calentamiento típico1 de (60 seg. aproximadamente). Al término
del penodo de calentamiento, el motor de arranque s$e de operación y la aceleración de la UTG
I
i I I I
!
I
I iI !
I
I
i
12 -C_c-
-

control convencional de UTG's Capítulo 2
se deberá exclusivamente a los gases producto de la combustión y a la curva de aceleración hasta
principales eventos se presentan con más detaile en la Figura 2-2.
alcanzar la velocidad de sincronismo. Las etlpas I del arranque de la UTG en donde ocurren los
I 1
Bomb!! de aceite de lubneacidn encendida NO ha$ flama Di~parns restablecidos
Seiectdrde combustible pas ETAPA Alabes'& -dos
Regulador de voltaje y rincnmizadar en aunm6tico Lndicacibn de Lim para arrancar Lndiaejbn de wdiares operando
I hdicacih de lislo para arrancar apagada lndiecibn de arranque encendido
Indidci6n de vdDOdad c m (16 rpm)
m-1 Embraga Anahca m o m meda de dentada arranque de arranque
l"dicaci60 de flama premie ai caman de combuli6n Peado de calentamiento (60 rep) aprox. inicia CUM de hfelmeibn
I
I
I
Valwlar de ranmado cenadas 4920 rorn 1 I
Alabe gula abienOd (50%) 4920 rpm hdicacidn de secuencia Completa
I LndicaciOn de ueloci'dad de sincronismo de UTG (4945 rpm) Cierre automitico del intmupnr de ampo del generador
I I
Figura 2-2 Etapas y permisivos en el arranque de la UTG I 1
I Si la secuencia ha sido completada satisfactonhente se activa el selector en el estado
operativo de sincronización y una vez sincronizada Ila unidad genera una potencia mínima de I
MW. I

, .
Capítulo 2 control convencional de UTG‘s
I El arranque automático de la UTG se debe efectuar desde la estación de operación de la IHM al presionar el botón de arranque localizado en el panel principal de operación. La secuencia de
arranque consiste de sene de eventos sucesivos necesarios para el arranque automático de la
unidad. Cuando el operador acciona el botón de restablecimiento de disparos se inicializan todas
las señales y variables involucradas en el sistema para asegurar la condición de arranque. De esta
manera, cuando se genera la indicación de “Turbina lista para arrancar” el operador puede
I
I I I I
I
oprimir el botón para iniciar el rodado automátiqo I de la UTG.
El control recibe la solicitud de arranque y cuando I los permisivos están presentes, se acepta la solicitud de rodado. AI mismo tiempo que el co!~trol lógico genera las demandas para activar la
I rueda dentada hidráulica y el embrague para acthar el motor de arranque y rodar la turbina. En
I tanto el control, establece una apertura mínima (20%) a la válvula de combustible. Por otra parte,
I
el secuenciador genera la acción de encender las /ujías de ignición durante un periodo de tiempo
(5 seg) para generar la chispa eléctrica e iniciar lb combustión. Cuando los detectores detectan
flama en la cámara, se genera una indicación en el panel de operación, mientras tanto, el control
reduce la apemira minima (10%) durante un periodo de tiempo de 60 segundos aproximadamente
para permitir el calentamiento suave y uniforme.
I
I
I
I I I
La aceleración de la UTG en esta etapa se calcula de acuerdo a la curva de aceleración
predefinida la cual establece el punto de ajuste de velocidad (referencia). Cuando la velocidad de
la UTG es de 2160 rpm se desactiva el motor de arrhque y se continua con la aceleración de la unidad. En las 4920 rpm, el secuenciador genera el domando I de cierre de válvulas de sangrado y
apertura de alabes guía de entrada de aire al c o m p r v . Así mismo, genera. la indicación en el panel de operación de “Secuencia completa” de arranque I exitoso y termina la rampa de aceleración. A partir de este punto previo a la sincronización 1 (manuaUautomática), la velocidad
de la UTG cambiara (5100 rpm) para ajustarse al val$ correspondiente de fase del generador de
la UTG con la fase del sistema eléctrico en lined, y finalmente el comando de cierre del interruptor del generador para enlazar la potencia generada mínima de MW al sistema general de
i
I
I
I energía eléctrica. !
I
14 __...I._I -
y- - -

Capitulo 2 Control convencional de UTG’s
2.2. Control convencional PID en turbinas de gas I
El lazo de control de de una entrada y una salida que se
(ver Figura 2-3). Los retos de basa en un algoritmo de control desempeño de control que debe satisfacer este1 I lazo de control para la UTG son: la capacidad de
seguimiento a cambios en la referencia o setpoint y la capacidad de rechazo a perturbaciones que I
se presentan durante las etapas en el arranque. I I
En donde: kp es la ganancia proporcional I I . . q el tiempo integral o tiempo de restablecimiento
cd el tiempo derivativo o tiempo de/cambio I I I haciendo:
En donde: k, es la ganancia proporcional I 1 k, es la ganancia integral
I I kd es la ganancia denvativa . I
I Figura 2-3 Algoritmo de Control PID
I
15
Capitulo 2 Control convencional de UTG's
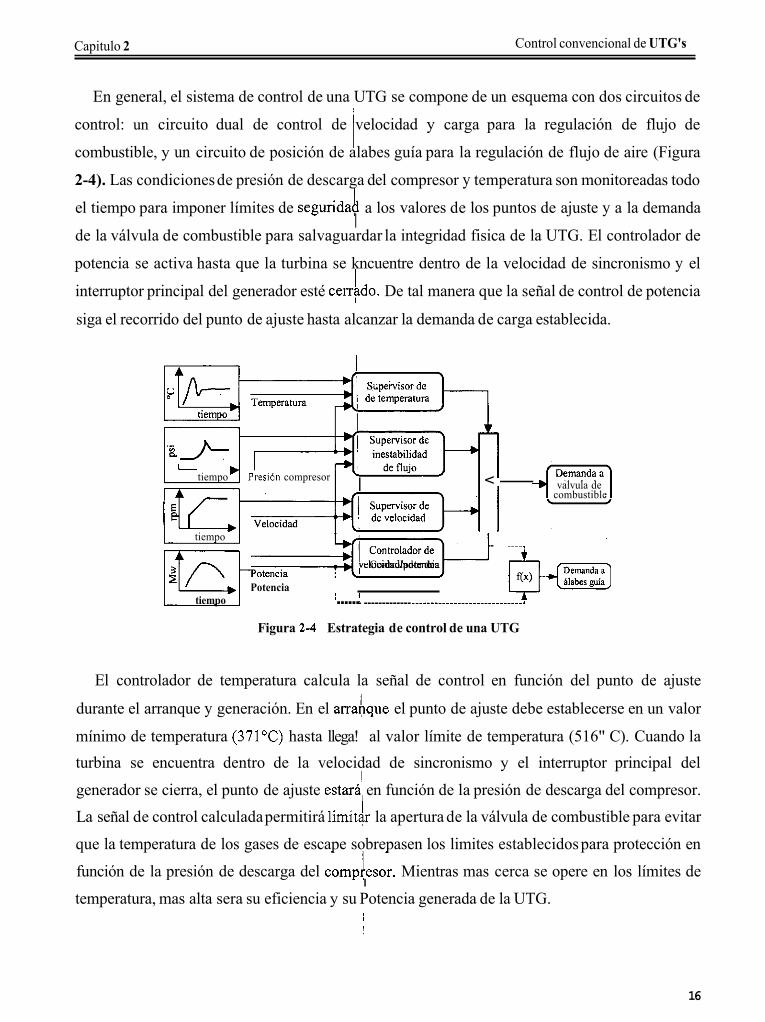
En general, el sistema de control de una UTG se compone de un esquema con dos circuitos de
control: un circuito dual de control de velocidad y carga para la regulación de flujo de
combustible, y un circuito de posición de alabes guía para la regulación de flujo de aire (Figura
2-4). Las condiciones de presión de descarga del compresor y temperatura son monitoreadas todo
el tiempo para imponer límites de seguridak a los valores de los puntos de ajuste y a la demanda
de la válvula de combustible para salvaguardar la integridad fisica de la UTG. El controlador de
potencia se activa hasta que la turbina se kncuentre dentro de la velocidad de sincronismo y el
interruptor principal del generador esté cerrydo. De tal manera que la señal de control de potencia
siga el recorrido del punto de ajuste hasta alcanzar la demanda de carga establecida.
I I
1
db-, tiempo
.% J- <- I tiempo ' Presián compresor
tiempo ................................................
valvula de combustible
- ~ \ e i o c i d a d / p o t m c i a ~ Controlador de
Potencia : I tiempo ...... i ............. ..............................
Figura 2-4 Estrategia de control de una UTG
El controlador de temperatura calcula la señal de control en función del punto de ajuste
durante el arranque y generación. En el arrdque el punto de ajuste debe establecerse en un valor
mínimo de temperatura (371OC) hasta llega! al valor límite de temperatura (516" C). Cuando la turbina se encuentra dentro de la velocidad de sincronismo y el interruptor principal del
generador se cierra, el punto de ajuste estard en función de la presión de descarga del compresor. La señal de control calculada permitirá limit+ la apertura de la válvula de combustible para evitar
que la temperatura de los gases de escape sobrepasen los limites establecidos para protección en
función de la presión de descarga del comp!esor. Mientras mas cerca se opere en los límites de
temperatura, mas alta sera su eficiencia y su Potencia generada de la UTG.
I
I
I 16

Capitulo 2 Control convencional de UTG’s
Es muy importante la variable temperatura ya que es la que protege a la unidad de
sobrecalentamientos y esfuerzos térmicok en sus1 partes metálicas (alabes). En control de
velocidad, el control por temperatura protege a la unidad de sobrecalentamientos activando la
protección llamada “retroceso por temperatura” limitando la válvula de combustible que se
traduce en la disminución de la velocidad de la unidad hasta que se restablezca ésta protección.
1
I
En control de carga, el control por temperatura tiene mayor importancia debido a que a mayor
generación mayor será la apertura de la válvula de combustible y por lo tanto una alta
temperatura en la unidad. Entonces la unidad generará la mayor potencia eléctrica de acuerdo al
I
límite de temperatura. Si este límite de, I temperatura es rebasado, entonces se activará la
protección de retroceso por temperatura disminuyendo la generación hasta que la temperatura sea
menor a la variable límite de temperatura, entonces se restablecerá la protección de retroceso. En
caso de seguir aumentando la temperatura existe la última protección de disparo por alta
temperatura (565.5 “C) La Figura 2-5 muestra un diagrama general esquemático del control de
velocidadcarga de una UTG [Sáncbez, et al., 20021.
I
I
Figura 2-5 Esquema de control de velocidad y potencia eléctrica de una UTG
17

Capítulo 2 Control convencional de UTG’s
2.3. Estructura de un sistema de Control de un grado de libertad
Considerando el sistema de control de un de libertad de la Figura 2-6.
Figura 2 4 Estructura de 1 grado de libertad
t cuyas funciones de transferencia (FT) en lazo cerrado son: !
(2.4)
En donde R(s)es la entrada, D(s) es una perturbación, Y(s) es la salida, C(s) el controlador, P(s) es
la planta, G,&) es la FT de Y(s)/R(s), Gy&) es la FT de Y(s)/D(s). Las definiciones anteriores
se relacionan como:
Esto significa que dado P(s), G&) es Únicamente determinado si Gyd/(S) es dado, y
viceversa. Este heiho causa dificultad para encontrar los parámetros de sintonización, es decir, si
la respuesta al disturbio es mejorada, la respuesta al setpoint es afectada y viceversa [Taguchi, et
al., 20001. Esto se demuestra introduciendo una entrada y una perturbación del tipo escalón unitario a una planta de primer orden con retardo, utilizando un control PID convencional con
una estructura de un grado de libertad (PID-IGL). I <
e 4 . Z ”
P(s) = ~ 1 s+ l (2.7)
18

Capítulo 2 Control convencional de UTG's
, .
El controlador PID es sintonizado'(un punto de operación) para obtener la mejor respuesta a
rechazo a perturbación (respuesta-d) y mejor respuesta a cambios en la referencia (respuesta-r).
La línea continua indica la respuesta-d con parámetros básicos de sintonización del PID de
(Kp=6.0, Ti=0.40, TpO.084) (Figura 2-7a) y la linea punteada es la respuesta-r con parámetros de
sintonización (Kp=4.75, Tt=1.35, T80.094j (Figura 2-¡b).
Figura 2-7 (a) Respuesta-r del PID-IGL, (b) Respuesta-d del PID-1GL
Claramente se observa que al sintonizar el controlador PID para mejorar la respuesta-r se
afecta el desempeño de la respuesta-d y viceversa. Esto se debe a que el esquema de control
convencional no tiene la libertad para sintonizar la respuesta a cambios en la referencia y rechazo
a perturbaciones de manera independiente. Además, este tipo de controlador se sintoniza para un solo punto de operación.
19

Control convencional de UTG's Capítulo 2
2.4. Control PI de dos grados de libertad (un punto de operación)
2.4.1. Estructura del PI-2GL I Considerando el sistema de control de dos grados de libertad de la Figura 2-8.
I
I Figura 2-8 Sistema de control de 2 grados de libertad
Las funciones de transferencia en lazo'cerrido son:
en donde R(s) es la entrada, D(s) es una perturbación, Y(s) es la salida, C(s) es el controlador
retroalimentado, CAS) es el controlador prealimentado, P(s) es la planta, Gyr&)=Y(s)/R(s) y
Gydi(s)=Y(s)/D(s).
I . De acuerdo a (2.8), la respuesta a los cambios en la referencia difiere con respecto a un PI- 1GL por el segundo término, cuya intervención puede ser definida por CAS) en el sistema de control con dos grados de libertad. En consecuencia, la gran ventaja del sistema de control con dos grados de libertad se debe a que su estructura provee los medios necesarios para sintonizar de
manera independiente la respuesta a cambios en la referencia y la respuesta de rechazo a
perturbaciones. Para mostrar esto, se considera el controlador PID-2GL presentado en [Taguchi, et al., 20001, en el cual C(s) es un controlador PID denominado compensador serial:
I
20

Capítulo 2 Control convencional de UTG'~
(2.10) donde KP es la ganancia PrOporCiOnal, es'el I tiempo integral Td es el tiempo denvativo y D&)
controlador PD con dos parámetros a 9 I f l de sintonización denominado compensador es una aproximación a la derivada de la señal de error D,(s)=s/(n+l). Además, CAS) es un
prealimentado: I 1 I
i 2.4.2. Caso de estudio con planta de p&ner orden I I
e-o.z, P(s) = +
s + 1
(2.1 1)
(2.12)
para mostrar las del PD-2GL, se evalua con el sistema de primer orden en (2.]2), un escalón para cambios en la referencia R(s) y un escalón en la perturbación D(s). De
acuerdo a [Taguchi, et al., 20001, para el PID-2GL presentado en (2.10) y (2.11), los parámetros
del compensador serial para una respuesta d-óptima y una respuesta r-óptima son (Kp=6.0,
T,=0.40 y Tfi0.084). Los valores de los parámetros del compensador prealimentado son ~ 0 . 6 0 y
p0.63. La Figura 2-9a muestra la respuesta-r del PID-2GL aplicando un cambio en la referencia
y la Figura 2-9b presenta la respuesta-d aplicando una perturbación. Como puede observarse, el
PID-2GL permite obtener las mejores respuestas de seguimiento de referencia y de rechazo a pemrbaciones (ver mismo caso de estudio con PI-1GL'en Sección 2.3).
I
La Figura 2-10 muestra la relación que existe entre el desempeño de seguimiento y rechazo a
perturbaciones para una estructura de 1GL y una de 2GL. Para el PID-1GL sólo puede establecer
un compromiso que no siempre es satisfactorio [Taguchi, et al., 20001. El área sombreada es
realizable uor el control PID-1GL. Esto significa que no se pueden tener las repuestas r-Óptima Y
d-Óp~ma a la vez y se debe establecer un compromiso de desempeño [cualquier punto en la línea
-esa entre A y B). Por otro lado, el PID-2GL puede proporcionar las mejores respuestas i sin que
1' ,* _ _ - --

, . - . . , > I I
. , . , . . ,
Capítulo 2 1. Control convencional de UTG's
PID.2GL (respuesta-r) - d-optuna I .
2
.................................................................................... 4
O' / I 1 I I I O 0 5 2 2 5
PID-2GL (respuesta-d)
I I I I
O 0.5 tianpo(seg) 1.5 2 2.5 -0.05
@) Figura 2-9 (a) Respuesta -r, y (b) respuesta-d del PID-2GL
6 I I//,, Controlador IGL
A Set-point optimo
C: Realizable para el
perturbaciones B: Perturbación optima
controlador de 2GL I
B u e n o 0 e Ma? set-point
Figura 2-10 Respuestas realizables con PID-1GL y PID-ZGL. ? '
22

Capitulo 2 Control convencional de UTG’s
2.4.3. Caso de estudio con modelo de la UTG
Un índice de comportamiento es un númerwque indica la “bondad” del funcionamiento de un sistema. Se puede considerar óptimo a un sistema de control si los valores de los parámetros están
elegidos de forma tal que el índice es mínimo o máximo [Ogata, 19741. Existen índices que
permiten evaluar criterios de control [Atrom, et al., 19951
Para el análisis de las pruebas de simulación se utilizará el índice del error absoluto acumulado
(IAE), debido a que es sencilla su implementación en computadora y calcula un valor de error
acumulado desde el inicio y fin de la simuiación. Proporciona un valor indicativo del desempeño
del controlador en el seguimiento de la velocidad a la curva de referencia. También se utilizará el
índice de la señal de control ai cuadrado acumulada (EC) para medir el esfuerzo de control al
elemento final para todo el rango de simulación de la UTG. Una característica de éste índice es
que le da mayor peso a valores grandes y menor peso a valores pequeños de la señal de control.
Estos índices se definen como:
IAE = 11 e(t) I dt O
m
EC = 1u2(t)dt O
(2.13)
(2.14)
La Figura 2-11 y la Figura 2-12 muestran la estructura de un controlador PI-1GL y PI-2GL
respectivamente integrado al proceso :de la UTG. Se realizan simulaciones de velocidad de la
UTG utilizando un controlador PI-1GL y un controlador PI-2GL convencionales en versión discreta y sintonizados lo mejor posible en un punto de operación del rango de arranque de la
UTG [Castelo, et al., 20041.
I Figura 2-1 1 Controlador PI-1GL
23

~~ - .I I ~. .~ .- ~ .~
. .
Cone01 convencional de UTG’s capítulo 2 . ,
I I Figura 2-12 Controlador PI3GL
En la Figura 2-13a se muestra la respuesta de la UTG con el PI-1GL con parhetros KP=3.5 y K,=0.7. Se indican cuatro eventos importantes de la secuencia de arranque: I) en t=70 seg, inicia
la curva de aceleración y se activa el control de velocidad, 2) en e 9 0 sale el motor de arranque,
3) en F195 se produce el cierre de las válvulas de sangrado y apertura de alabes guía, y 4) en
F205 se tiene un cambio de pendiente en la curva de aceleración. Es importante notar que en los
eventos 1 y 4 se tienen cambios de la pendiente en la cuma de referencia, mientras que en los
puntos 2 y 3 son eventos programados de operación y son vistos como perturbaciones externas
por el lazo de control de velocidad. En la Figura 2-13b se muestra la respuesta de la UTG con el PI-2GL. Los parámetros del compensador serial tienen los mismos valores (Kfi=3.5 y Kz=0.7) que
en el PI-IGL. Para el compensador prealimentado se tiene K ~ 0 . 0 3 .
I
(4 (b) Figura 2-13 (a) Arranque de la UTG con el PI-lGL, @) Arranque de la UTG con el PI-2GL
Aunque a simple vista se observan muy similares los desempeños de los dos controladores, la diferencia se detalla con el iAE=2968.8 para el PI-1GL y el iAE=2512.8 para el PI-2GL. La
Figura 2-14a muestra un acercamiento de la zona en que sale de operación el motor de arranque.
24

Capítulo 2 Control convencional de UTG’s
La Figura 2-14b presenta un acercamiento de la zona del evento de cierre de válvulas de sangrado
y apertura de alabes guía. Es evidente queiel PI-2GL tiene un mejor seguimiento respecto a la
curva de referencia que respecto al PI-1GL.
!i
PLlGL VS. PUGL PClGL VS. PUGL
M m 90 im ~ i i o 1x1 ,iompo beg) tiemi>(> (38s)
(a) (b)
Figura 2-14 (a) Acercamiento en zona salida motor, (b) Zona de cierre válvulas sangrado
2.5. Necesidad de un controlador de mejor desempeño
De acuerdo a la Sección 2.3 y Sección 2.4, es necesario contar con controladores que
proporcionen mayores recursos de control para seguimiento y rechazo a perturbaciones. La
propuesta de solución con este trabajo de tesis es el de diseñar un controlador PI neurodifuso con
una estructura de control de dos grados de libertad. AI ser el controlador de dos grados de libertad
se puede sintonizar de manera independiente para el seguimiento y rechazo a perturbaciones a la
vez [Taguchi, et al., 20001. También al tener la característica de ser neurodifuso, el controlador se
sintoniza para todo el rango de operación de la UTG. La Figura 2-15 presenta el esquema
propuesto del controlador PI-ND2GL.
Traycctona prea1imenlada
myectona remiallmsntada
I Figura 2-15 Controlador PI-ND2GL propuesto
1/ 25

Capítulo 3 I Sistemas Neurodifusos
CAPÍTULO 3
SISTEMAS NEURODIFUSOS
En este capítulo se presentan las características de un sistema neurodifuso. De la lógica difusa,
se explota el conocimiento aproximado y de las redes neuronales la capacidad de aprendizaje y
optimización. Se analiza el modelo ANFIS para la generación de los sistemas difusos a partir de
patrones de entrenamiento. La Sección 3.1 describe las características del modelo ANFIS de
Matlab. La Sección 3.2 ejemplifica la representación de un sistema difuso comd una red neuronal
de acuerdo a la estructura ANFIS. La Sección 3.3 detalla el método de aprendizaje (propagación
y retropropagación) que utiliza el modelo ANFlS y la Sección 3.4 muestra el método de diseño
de los sistemas neurodifusos.
3. SISTEMAS NEURODIFUSOS
Los sistemas neurodifusos pueden ser empleados en la corrección de errores, clasificación de
datos, predicción de valores, etc. En este trabajo,de tesis, un sistema neurodifuso (SND) permitirá
automatizar el diseño de inferencia difuso. En un SND se fusionan conceptos de sistemas difusos
y redes neuronales para obtener un solo sistema'que presente las ventajas de ambas técnicas. De
las redes neuronales el interés es contar con la..capacidad de aprendizaje y optimización, y una
estructura que garantice una degradación paulatina del desempeño del sistema en caso de falla. De los sistemas difusos, el interés es contar con la capacidad de operar bajo incertidumbre con conocimiento aproximado, procesar información con reglas de inferencia del tipo si-entonces, y tener la facilidad para incorporar e interpretar el conocimiento de operadores, expertos para el
control de procesos. En la literatura se encuenb.an varios paradigmas de sistemas neurodifusos
entre los que se encuentran FALCON (Fuzzy Adaptive Learning Control Network) propuesto para,estudiar estrategias de aprendizaje de estructura de parámetros [Naucke, et al., 19971; ARIC
(Aproximate Reasoning based Intelligent Control) utiliza varias redes neuronales prealimentadas
. .
I I 26

Capitulo 3 Sistemas Neurodifusos
[Naucke, et al., 19971; GARIC (Generalized ARIC) mejora al método I ARIC [Naucke, et
a1.,1997]; NEFCON (Neuro Fuzzy Control) capaz de aprender y optimizar las reglas básicas de
un sistema difuso Mamdani [Sugeno, 19851; " D F R (Neural Network Driven Fuzzy Reasoning)
basada en redes neuronales comunes estructuradas con técnicas de sistemas difusos [Takagi, et
al., 19911; FuNe (Fuzzy Network) basado en la arquitectura de una red neuronal prealimentada
de cinco capas [Halgamuge, et al., 19931 y ANFIS (Adaptive Network-based Fuzzy Inference
System) propuesto para aproximar funciones usando sistemas difusos tipo sugeno [Jang, et al.,
19971.
Para este trabajo se utilizó el modelo ANFIS debido a que es un software comercial,
disponible y utilizado. Además, tiene las características adecuadas en sus algoritmos matemáticos
de aprendizaje que ayudan puntualmente a resolver las necesidades del proyecto de tesis.
3.1. Estructura ANFIS
Una red adaptiva, como su nombre io indica, es una estructura de red consistente de un
número de nodos conectados con ligas y dirección. Cada nodo representa una unidad de proceso
y la liga entre nodos especifica la relación causal entre los nodos conectados. Todo o parte de los
nodos son adaptivos, lo cual significa que la salida de estos nodos depende de modificación de
parámetros relacionados a estos nodos. La regla de aprendizaje especifica cómo estos parámetros
deben ser actualizados para minimizar una medida de error preescrita, la cual es una expresión
matemática que mide la discrepancia entre la salida actual de la red y una salida deseada. En otras
palabras, una red adaptiva es usada para identificación de sistemas y nuestra tarea es encontrar
una apropiada arquitectura de red y un conjunto de parámetroc el cual pueda mejorar el modelo a
un sistema desconocido que es descrito por un conjunto de pares de datos de entrada y salida.
1: I
La regla de aprendizaje básico de una red adaptiva es conocido como método de paso
descendente, en el cual el vector gradiente es derivado por invocación sucesiva de la regla de la
cadena. También es usado el mismo procedimiento para encontrar el gradiente descendente en redes neuronales multicapa. El procedimiento es llamado regia de aprendizaje de
retropropagación [Jang, et al., 19971
27

. .- .. . . . . / I l l . 1 I
Capítulo 3 Sistemas Neurodifusos
Una red adaptiva se muestra en la Figura 3-1 es una estructura de red cuyo comportamiento
global de entradas y salidas es determinado por una colección de parámetros modificables. La
configuración de una red adaptiva está compuesta de un conjunto de nodos conectados por ligas
directas, donde cada nodo desempeña una función estática, en ésta entran señales para generar un
nodo de salida simple y cada liga especifica la dirección del flujo de señal desde un nodo a otro.
Los parámetros de una red adaptiva son distribuidos dentro de estos nodos, entonces cada
nodo tiene un conjunto de parámetros locales. La unión de estos conjuntos de parámetros locales
son globalmente los parámetros de la red."Si un conjunto de parámetros de un nodo no está
vacante, entonces esta función nodo depende de los valores de parámetros; se utiliza un cuadro
para representar este tipo de nodo adaptivo. En otras palabras, si un nodo tiene un conjunto de
paráme.tros vacantes entonces esta función es fija o nodo fijo. Un círculo denota este tipo de
nodos fijos. Cada nodo adaptivo puede ser ... descompuesto . dentro de un nodo fijo (nodo extra) o varios parámetros de nodos.
:: /.
Figura 3-1 Red adaptiva prealimentada en representación por capas
La Figura 3-2a muestra una red adaptiva con solo un nodo, la cual puede ser representada como y=f(x,a), donde x e y son la entrada y salida respectivamente y a es un parámetro del nodo. Una representación equivalente consiste en mover el parámetro del nodo de salida y poner dentro
el parámetro a.
La Figura 3-2b muestra dos nodos adaptivos u=g(x,a) y v=h(y,a) que comparten el mismo
parámetro a, como se muestra entre la línea punteada entre estos dos nodos. Si se pone el
28
ii jj

Capítulo 3 Sistemas Neurodifusos
parámetro a, dentro de un nodo, queda embebido compartiendo los requerimientos dentro de la
arquitectura, esto simplifica la representación de la red y el software para su implementación.
. (a) x u
a ; : + ': y " (b)
Figura 3-2 (a) Nodo simple, (b) Parámetro compartido
Las redes adaptivas son generalmente clasificadas en dos categorías en base al tipo de
conexión que tienen: las tipo prealimentadas y tipo recurrentes. La red adaptiva prealimentada se
presentó en la Figura 3-1, la entrada es propagada a través de cada nodo hasta la salida (izquierda
a derecha). Si existe una liga retroalimentada en la red, entonces se le llama recurrente. La Figura
3-3 muestra este tipo de red.
x, x*
x, x,
4 4 4 4 Capa2 Capa3 de salida Capade Capa 1 entrada
Figura 3-3 Red adaptiva recurrente
En el presente trabajo se propone una clase de redes adaptivas que son funcionaimente
equivalentes a un sistema de inferencia difuso, Se describe como descomponer los parámetros
para facilitar el aprendizaje híbrido de reglas para una arquitectura ANFIS representado por el
modelo difuso Sugeno [Jang, et al., 19971. Se.asume que el sistema de inferencia difuso bajo consideración tiene dos entradas x e y, y una salida z. Para un modelo difuso Sugeno de primer
orden, comúnmente el conjunto .de reglas coniidos reglas difusas del tipo si-entonces es como sigue:
r ' ,
29

. __ .- . . . . . .
Cauítulo 3 Sistemas Neurodifusos
Regla 1: Six es Al yy es B,, Entonces fl= P I X f qly + rl
Regla 2: Six es A2 y y es Bz, Entonces f2= pix + qiy + rz
La Figura 3-4 ilustra el mecanismo de razonamiento para este modelo Sugeno. La
correspondiente arquitectura ANFIS equivalente se muestra en la Figura 3-5 en donde los nodos
de la misma capa tienen funciones similares. Se denota como la salida del i-ésimo nodo en la
capa 1 como 01,~. La aportación de cada regla se define como wl y w2 respectivamente.
i x Y x Y
Figura 3-4 Modelo Difuso Sugeno de orden con dos entradas y dos reglas
Capa 1 Capa 2 Capa 3 Capa 4 C.ps 5
x
1
Y
Figura 3-5 Arquitectura ANFIS equivalente al sistema difuso Sugeno de orden 1
A continuación se describen cada una de las cinco capas que conforman el modelo básico de
ANFIS de un sistema de orden 1 [Jang, et al., 19971.
30

Capitulo 3 Sistemas Neurodifusos
CAPA 1: Cada nodo i en esta capa es un nodo adaptivo con una función donde x Ó y es la
entrada al nodo i, y A, o B, son niveles lingüísticos (“pequeño”, “grande”)”asociado con este
nodo.
En otras palabras, O),! es el grado de membresía del conjunto difuso A que puede ser (AI, A2,
BI o Bz) y esto especifica el grado para que dadas las entradas x ó y se satisfaga el cuantificador
A. Aquí la función de membresía para A puede ser una apropiada función de membresía
parametrizada tal como la función bell generalizada:
donde a,, b,, c, son el conjunto de parámetros. Los parámetros en esta capa son llamados como
premisa de parámetros.
Si se tienen conjuntos difusos del tipo triangular Figura 3-6, una primera forma de poder
representar a la salida OI,, de la capa 1 de ANFIS es por medio de la pendiente de los dos
segmentos del triángulo obteniendo las siguientes relaciones:
A, = Trianplo(x;a,,b,,c,) parai = 1,2
B, = Triangulo(y; a,, b, , c, ) para i = 3,4
(3.4)
(3.5)
31

Capítulo 3 Sistemas Neurodifusos
Y
.......
i
O s i x á a X - U
~ s i a < x á b b - a c - x
~ s i b < x < c
O s i x > c c - b
Figura 3-6 Función de membresía tipo triangular con puntos a, b, c
Una segunda forma de representar la capa 1 de M I S sería trazando los tres segmentos del
triángulo y realizar las comparaciones de acuerdo a la definición siguiente:
x - a c - x p ( x ) = max O, min ~ __ ( ( b - a ’ c - b ) )
Luego entonces para funciones tipo triangulares, se puede definir las salidas de cada nodo de la
capa 1 del modelo ANFIS, por ejemplo:
O,,, = pn,(x) = max ( O, min ’ [‘-al ~ , ~ c t - x ] ) parai=1,2 b, -a, C, - b,
I I \ \
(3.7)
CAPA 2: Cada nodo en esta capa, es un nodo fijo etiquetado Il cuya salida es el producto de
todas las señales de entrada:
= w, = run, ( X ) r u B , ( Y ) para 2 = 1,2 (3.9)
Cada salida del nodo representa la fuerza de disparo de la regla. En general, algún otro operador de la norma-T que desempeñe un difuso AND, puede ser usado como el nodo de la función en
esta capa.
32

Capítulo 3 Sistemas Neurodifusos
CAPA 3: Cada nodo en esta capa es un nodo fijo etiquetado N. El i-ésimo nodo calcula la
aportación de la i-ésima fuerza de disparo de la regla para la suma de todas las aportaciones de
cada una de las reglas: 'I
(3.10)
Por conveniencia, las salidas de estas capas son llamadas fuerzas de disparo normalizadas.
CAPA 4: Cada nodo i en esta capa es un nodo adaptivo con una función nodo:
. . o,,i = k h =$pix + q iy + r i ) (3.1 1)
Donde w, es una fuerza de disparo normalizada desde la capa 3 y (pl, q,, r,) son el conjunto de
parámetros de este nodo. Los parámetros de esta capa son llamados, parámetros consecuentes.
CAPA 5: Esta capa simple, es un nodo fijo etiquetado con
como la sumatoria de las señales entrantes:
el cual calcula el total de la salida I
(3.12)
3.2. Representación de un sistema difuso como una red neuronal.
La Figura 3-7 muestra la estructura de un sistema neurodifuso representado por medio de una red neuronal con dos entradas y tres conjuntos difusos (tipo triangular) para cada una de éstas y una salida (combinación lineal). Las capas se describen de acuerdo al modelo ANFIS.
33

Capítulo 3 Sistemas Neurodifusos
Figura 3-7 Representación del sistema difuso por medio de una red neuronal
CAPA 1
Se tienen dos entradas, el error (e) y la derivada del error (Ae). Para cada una de las entradas
se proponen tres conjuntos difusos de f o i a triangular (funciones de membresía) con valores
lingüísticos de (N-negativo, C-cero, P-positivo). La Figura 3-8 muestra estos conjuntos difusos
para las entradas e y Ae.
Figura 3-8 Conjuntos difusos de las entradas e y Ae.
Cada neurona fusifica la señal de entrada por medio de funciones de membresia tipo
triangular. De igual forma definimos como O!,, la salida de cada nodo de la capa 1, en donde 1
indica la capa e i el numero de nodo. La fusificación consiste en convertir un valor numérico
especifico x* de una variable numérica real X, a un conjunto difuso A'. Con este cálculo se obtiene el grado de pertenencia y puede usarse por el sistema de inferencia (base de reglas). El
grado de pertenencia queda definido como:
34

Sistemas Neurodifusos Capitulo 3
O,,; = ,u(Ae) = max [ O, min ,' [ ~ , e)) j = 4,5,6 .bi - a , cj -b,
(3.13)
(3.14)
CAPA 2
Cada nodo en esta capa es un nodo fijo y es etiquetado con x debido a que no tiene parhetros
que ajustar. Existe un nodo por cada regla. En esta capa se calcula el peso o fuerza de disparo de
los antecedentes de cada regla, se utiliza el producto algebraic0 de la norma T.
O 2.1 = w, = ,uci (e) ,uAe, (Ae) para i = 1 a 9 (3.15)
CAPA 3
En esta capa se calcula la normalización de los pesos de cada una de las reglas con respecto a
la suma de los pesos de las demás.
(3.16) parai = l a 9 wi w, + w2 + w3 + w4 + ws + w, + w, + w, + w,
- o = w . = 3.1 '
CAPA 4
En esta capa se calculan los consecuentes normalizados por medio de h a función que es la
combinación lineal de las entradas. El número de neuronas o nodos es igual al numero de reglas.
Estas reglas son del tipo si-entonces y con consecuentes del tipo TSK.
Reglas:
1. Si e es N y Ae es N, entonces fi=Pie+q,Ae+rl 2. Si e es N y Ae es C, entonces fiLPp2e+qzAe+rZ 3. Si e es N y Ae es P, entonces f3=P3e+q3Ae+r3 4. Si e es C y Ae es N, entonces f4=P4e+qeA&rd 5. Si e es C y Ae es C, entonces fs=Pse+qsAe+rS 6. Si e es C y Ae es P, entonces f&P&q,&+r6 7. Si e es P y Ae es N, entonces f7=P7e+q7Ae+r7
35

Sistemas Neurodifusos Capítulo 3
8. Si e es P y Ae es C, entonces fg=Pge+qgAe+r8 9. Si e es P y Ae es P, entonces f9=P&q9Ae+r9
O,¡ =FA. =F(p,e+q,Ae+G) para i = l a 9 (3.17)
CAPA 5 Es una neurona única y calcula la salida total del sistema difuso (suma de consecuentes)
3.3. Método de aprendizaje
(3.18)
3.3.1. Propagación
La propagación es una parte del aprendizaje que consiste en propagar todos los patrones de
entrada a través de todas las neuronas de la red. Para una mejor explicación del procedimiento, se
propone un ejemplo de la siguiente red'de dos entradas y una salida (Figura 3-9).
Procedimiento
1. Diseñar la red neuronal.
X Y
Figura 3-9 Propagación de la red (4-4-4-4-1)
36

Sistemas Neurodihisos Capitulo 3
2. Definir el rango de acuerdo al valor de los patrones de entrada.
3. Definir los conjuntos difusos, (para este ejemplo se proponen funciones triangulares), e
inicializar los parámetros de las funciones de membresía (a,, b,, c,).
4. Propagar (izquierda a derecha) todos los patrones de entrada x, y
5 . Por medio del método de mínimos cuadrados, se encuentran los parámetros de los
consecuentes pi, q,, r,.
De acuerdo a la relación de las entradas con las reglas TSK se tiene de forma general:
4
z = C W . ( p , x + q,y + r,) como son cuatro reglas:
z1 = hi ( p i x + q,y + YI) z2 = WZ(P2X + q,Y + r2)
z3 = G ( p 3 x + q3y + r3) z4 = W4(p4x+ q4y+ )%)
reacomodando de forma matricial para las,cuatro reglas se tiene:
. Pi 41 ri
P2 42 r2
P3 41 r3
P4 44
. '4
(3.19)
(3.20)
(3.21)
37

Sistemas Neurodifusos Capítulo 3
La matriz queda representada como: [Z] = [XI [C]
donde: Z = salida deseada
X =patrones de entrenamiento afectado por los antecedentes
C = consecuentes
Aplicando la definición de mínimos cuadrados y con la ayuda de matlab se obtiene e1 vector de
los consecuentes:
c =[x.x]-’ X T z (3.22)
6 . Injcializar los consecuentes pi, q,, rl con los valores que se obtienen con mínimos cuadrados.
7. Realizar la retropopagación (derecha a izquierda) del error para encontrar~los valores de los
antecedentes (parámetros a,. b,, c,).
8. Actualizar los parámetros antecedentes (a,, b,, c,) y propagar de nuevo los patrones de entrada.
El termino de este procedimiento de propagar, retropropagar y actualización de parámetros se le
conoce como época.
3.3.2. Retropropagación
Al hablar de redes de retropropagación o redes de propagación hacia atrás hacemos referencia
a un algoritmo de aprendizaje más que a una arquitectura determinada. La retropropagación consiste en propagar el error hacia atrás, es decir, de la capa de salida hacia la capa de entrada, pasando por las capas ocultas intermedias y ajustando los pesos de las conexiones con el fin de
reducir dicho error. Hay distintas versiones o regias del algoritmo de retropropagación y distintas
arquitecturas a las que pueden ser aplicados.
El método de retropropagación, también conocido como Regla Delta generalizada consiste en la minimización, mediante un método de mínimo descenso, de una función costo que recoge la
I! .. .. .¡I
38

Capítulo 3 Sistemas Neurodifusos
suma de desviaciones de las respuestas de la red frente a las respuestas deseadas para cada uno de
los patrones de entrada. Las respuestas de la red se obtienen mediante la composición de las
funciones a lo largo de los diferentes niveles que forman la red (Figura 3-10).
X Y
Figura 3-10 Retropropagación de la red (4-4-4-4-1)
El gradiente descendente trata de encontrar los pesos que mejor se ajustan a los patrones y es
la base del algoritmo de retropropagación. Se trata de una regla de aprendizaje supervisado (es
preciso presentar a la red todos los casos de pares entrada-salida que se desea que la red aprenda,
y que el maestro modifique los pesos de las conexiones para corregir los errores en las salidas). Se denomina “regla delta” porque en esencia el procedimiento consiste en modificar los pesos de
las conexiones (por 10 tanto, favorecer el aprendizaje de la red) a partir del cálculo de la
diferencia (o delta) entre las salidas efectivas de la red y las salidas deseadas.
Para el uso del paso descendente para minimizar la medición del error, primero se debe
obtener un vector gradiente. Antes de calcular el vector gradiente se debe observar la siguiente
relación causal [Jang, et al., 1997 ] como se muestra en la Figura 3-1 1.
[FJ - [T] - [YJ+ [y) salidas de la medicion del nodos que
contienen ff
Figura 3-11 Relación causal
i‘ I( ’ II
39

Capítulo 3 Sistemas Neurodifusos
Se define la señal de error El,, como la derivada del error medido Ep con respecto a la salida del
nodo i en la capa I , tomando en consideración ambas trayectorias directas o indirectas que
permita hacer una relación causal.
(3.23)
Esta expresión es llamada como derivada ordenada [Jang, et al., 19971. Considerando la red
adaptiva de la Figura 3-12 sirve para indicar la diferencia entre una derivada ordenada y una
derivada parcial ordinaria.
Figura 3-12 Derivada ordenada y derivada parcial ordinaria
En la derivada parcial ordinaria se asume que todas las otras variables de entrada, en este caso y,
es constante:
(3.24)
En la derivada ordenada toma en consideración ambas trayectorias directa o indirecta y se deriva
de acuerdo a la regla de la cadena:
La señal de error para la salida del nodo i en la capa l se representará como:
Para el nodo interno:
(3.25)
(3.26)
40

Sistemas Neurodifusos Capitulo 3
(3.27)
La señal de error de un nodo interno en la capa 1 puede ser expresada como una combinación
lineal de la señal de error de los nodos en la capa 1+1 (retropropagación).
Calculando el vector gradiente para cada parámetro (a) de las FM se tiene:
ah,¡ para un dato a+E a+E a f i
- E l + l , m - aa ax,,, aa aa P - P 9 1 - -
a+E aEp -P==j- para todos los datos aa p=l aa
(3.28)
(3.29)
De acuerdo al paso descendente de minimización, la (3.26) se puede generalizar para un
parámetro a como:
a+E P - aE da aa
(3.30)
Para cualquier parámetro del nodo i en la capa 1 de forma genérica la razón de cambio para un
parámetro; después de un patrón de datos propagado es [Jang, et al., 1997 3:
k “=,I‘m (3.31)
suponiendo que a sea cualquiera de los parámetros a,, b, ó c, de cualquier función de membresia
p, y que E sea la medida del error dada por el cuadrado de la diferencia entre la salida deseada
Au* y la salida actual Au.
1 2
, E = -(A.* - A ~ ) Z (3.32)
‘I 41

Capítulo 3 Sistemas Neurodifusos
Para cualquier parámetro del nodo i en la capa 1 de forma genérica la razón de cambio para un
parámetro después de un patrón de datos propagado es:
(3.33) aE A u = -n- Regla delta au
De acuerdo a la regla delta en (3.33) y aplicando sucesivamente la regla de la cadena se tiene:
- dE - - dE dAu d i , hi, apt da ~ A U a;, aw, dp, au
De acuerdo a la red de la Figura 3-10, definimos las siguientes relaciones:
E = -(AU* 1 -AU)Z - aE = (AU* -Aux-l> 2 dAU
. (3.34)
(3.35)
(3.36)
- wi 1
como: -=- , de (3.37) se tiene: wi 1%
(3.38)
de acuerdo ai producto de los antecedentes de las FM se tiene:
42

Capítulo 3 Sistemas Neurodfusos
sustituyendo las relaciones de (3.39, (3.36), (3.38) y (3.39) se tiene: -
-=(Au' aE -Au)(-l)Aur3(l-")p,% aa Y
(3.39)
(3.40)
(3.41)
(3.42)
(3.43)
Para encontrar el nuevo parámetro a,, b, ó c, de las funciones de membresía se tiene de acuerdo a
(3.33):
aE A a = -n- da
aE a ,- a =-n- aa P
dE a(k +l)= a ( k ) - n- aa
(3.44)
sustituyendo (3.43) en (3.44) se tiene:
Para encontrar las derivadas parciales ,de - "' , definimos la siguiente relación de acuerdo a la
función de membresía dada y se tiene: aa
43

Capitulo 3 Sistemas Neurodifusos
si x s a x - a si a < x s b
c - x - si b < x < c c - b
aa a a L b - a J (b-a)” (b-a)’ (b-,a)’ %=-[ - ] -O a ( c - X ) - s i b < x l c . aa aa c - b
-- a~ ¡ - O s i x s a
ab a - x
(b - a)’ (b - a)” a (c-bXo)-(c-x)(-i) c - x ”=-[-I= =-
ab ab c - b (c - b)” (c - b)Z
- - O s ix>c ab aPi -
aPi - ac - - O s i x s a
si a< x 5 b
sib< x I c
a ( c- x ) (c-b)(l)-(c-xXl) c - b- c + x x - b si b<x I c - - - -
(c - b)” (C-b)” (C-b)’ A, - [ ’ ’j- - ac ac c - b
De acuerdo a [Jang, et al., 1997 1, el programa en Matlab ANFIS (Adaptive Network-based Fuzzy Inference System), puede utilizar un método de retropropagación simple utilizando el paso
44 ’ lj

Sistemas Neurodifusos Capitulo 3
descendente. Pero también puede utilizar el método híbrido de retropropagación que es una
combinación del paso descendente (obtiene parámetros de las FM) y mínimos cuadrados (obtiene
parámetros consecuentes) obteniéndose mejores resultados (convergencia) con el método híbrido
de aprendizaje.
3.4. Método de diseño (aprendizaje)
El procedimiento de aprendizaje consiste en la propagación de los patrones de entrenamiento
(entrada y salida) y por medio de una red neuronal equivalente a un modelo ANFIS, se obtengan
los parámetros pi, q,, r, para los consecuentes y a,, b,, c, para los antecedentes de las reglas.
Para aplicaciones prácticas el proceso de aprendizaje se puede resumir en tres etapas.
Etapa 1. Un conjunto de datos de entrada y salida para usarse como patrones de entrenamiento
necesita ser generado u obtenido directamente del proceso. Otro conjunto opcional de datos entre
el mismo rango puede usarse como datos de validación del entrenamiento para evaluar el proceso
de aprendizaje.
Etapa 2. Es necesario crear estructuras iniciales para el sistema difuso. Para cada entrada, el dominio de la variable, tipo y número de funciones de membresía (FM) deben definirse.
EtaDa 3. El proceso de aprendizaje se lleva a cabo usando el conjunto de datos (patrones de
entrenamiento) para ajustar los parámetros de los consecuentes y los parámetros de las funciones
de membresía (antecedentes). El sistema difuso resultante se valida usando otros datos por medio de la herramienta fuzzy logic de Matlab.
La Figura 3-13 muestra el procedimiento de aprendizaje de forma particular:
45

Sistemas Neurodifusos Capítulo 3
1. Definir e l dominio de las variables de entrada para las funciones de membresia (FM).
, <
2. Proponer e l tipo y número de FM.
3. Inicializar los parámetros de las FM.
4. Propagar todos Ips patrones de entrada por la red.
* 1 Por el metodo de minimos cuadrados, encontrar los valores
de los.consecuentes pi, qi, ri.
6. Actualizar los valores de los parámetros consecuentes encontrados en los nodos correspondientes.
I . 1. Propagar uno por uno los patrones de entrenamiento para
encontrar un error a la salida de la red.
t
v S. Realizar la retropopagacibn por medio de la regla Delta
(gradiente descendente) para encontrar los nuevos parámetros de las FiM.
9. Actualizar los nuevos parámetros de los FM. Durante este paso los consecuentes permanecen fijos
t
t
~
10. Realizar la propagación del siguiente patrón de datos y repetir el paso 8
11. Verificar iomo se comporta el error de medición y detener s i éste es lo bastante pequeño. *
(Fin) Figura 3-13 Procedimiento de aprendizaje
46 I( .t

Control PI neurodifuso de dos grados de libertad Capitulo 4
CAPÍTULO 4
CONTROL PI NEURODIFUSO DE DOS GRADOS DE LIBERTAD
En este capítulo se presenta el diseño del controlador PI neurodifuso de dos grados de libertad
para el control de velocidad de una UTG, la generación de los sistemas neurodifusos, la
estructura de control utilizada en su versión discreta y el método de alteración de los mapeos. La
Sección 4.1 muestra los eventos más importantes que se presentan en la fase de arranque de la
UTG y que son vistos por el control como perturbaciones. La Sección 4.2 presenta el diseño del
controlador PI neurodifuso de dos grados de libertad, la discretización de la estructura de control
de dos grados de libertad y la generación de los sistemas neurodifusos para las trayectorias
prealimentada y retroalimentada. La Sección 4.3 indica el procedimiento de implantación del
controlador PI neurodifuso de dos grados de libertad, el procedimiento de sustitución y mejora
del desempeño y finalmente el procedimiento de ajuste fino de forma manual @rueba y error) y automático (computadora).
4. CONTROL PI NEURODIFUSO DE DOS GRADOS DE LIBERTAD
4.1. Eventos críticos de la UTG a corregir por el controlador PI-ND2GL
El objetivo del sistema de control para la UTG en la etapa de aceleración es el de mantener la velocidad de la turbina lo más próxima con la curva de referencia de diseño de ésta (seguimiento), también durante el proceso de arranque existen eventos que son vistos por el
control como perturbaciones y deben ser rechazados para así lograr un arranque de la UTG exitoso hasta alcanzar la velocidad de sincronismo.
Primeramente se deben satisfacer las condiciones iniciales del proceso para el comando de arranque continuando con la aceleración y la generación de potencia eléctrica de la turbina
47

Capitulo 4 Control PI neurodifuso de dos grados de libertad
[Delgadillo, 19921. En la etapa de arranque de la UTG, existen permkivos lógicos de control y estados lógicos de equipos y auxiliares los cuales en conjunto forman la secuencia de arranque
de la UTG. La secuencia de arranque está dividida en etapas o eventos que transcurren a partir de
la activación del motor de arranque hasta el estado de velocidad de sincronismo. Durante estas
etapas se cumplen estados lógicos que son evaluados por el control y eventos críticos que son
vistos por el control como perturbaciones en el proceso de arranque.
Por lo tanto, el objetivo del control de una UTG es el de acelerar la unidad desde la velocidad
de tomaflecha hasta la velocidad nominal conforme a un patrón de aceleración predefinido, la
sincronización, toma de carga y paro de manera automática.
Los siguientes eventos son críticos en la etapa de arranque en la UTG.
1. Activación motor de arranque. Después de ser verificados todos los permisivos se da el
comando de inicio de arranque.[De Lara, et al., 20011.
2. Imición. Al llegar a la velocidad de 1020 rpm (17 rps), se realiza la ignición (flama) en la
cámara de combustión y el control mantiene un calentamiento de la cámara durante 60 segundos aproximadamente.
3. Inicio de ramua de arranque. Al término del periodo de calentamiento en la cámara de
combustión, el control realiza el inicio de rampa de aceleración a las 1920 rpm (32 rps).
4. Cambio de uendiente en la curva de arranque. Velocidad de 1920 rpm (32 rps.)
5. Salida de motor de arranque. A una velocidad de 2160 rpm (36 rps).
6. Cierre de válvulas de sangrado Y auertura de alabes mía. Velocidad de 4920 rpm (82 rps).
7. Cambio de uendiente en la curva de arranque. Velocidad de 5100 rprn (85 rps).
" I( i/
48

Capítulo 4 Control PI neurodifuso de dos grados de libertad
La Tabla 4-1, muestra cada uno de los eventos críticos de forma ordenada y el respectivo
requerimiento de control, estos pueden ser de seguimiento y/o rechazo a perturbaciones.
Tabla 4-1 Requerimientos de control
I 1 sincronismo I I I prealimentado I
La Figura 4-1 muestra la secuencia de eventos en el arranque de la General Electric GE-5001
respectivamente [De Lara, et ~ l . , 20011.
Figura 4-1 Secuencia de arranque de la turbogás GE-5001
1 !I
49

Capítulo 4 Control PI neurodifuso de dos grados de libertad
4.2. Controlador PI-ND2GL (modificado, discreto, todo el rango de operación)
4.2.1. Discretización y ubicación de los SND
El controlador PI-ND2GL se compone de tres sistemas difusos:
1. Ka La ganancia del compensador prealimentado.
2. I<p La ganancia proporcional de la línea retroalimentada.
3. Ki La ganancia integral de la línea retroalimentada.
I
Para el diseño del PI-ND2GL es necesario obtener una versión discreta para su iznplementación en equipo digital, y para obtener los mapeos (patrones de entrenamiento) de la
entrada y salida para ser utilizados junto con la herramienta ANFIS en el diseño neurodifuso. La
Figura 4-2 muestra la estructura de control de dos grados de libertad propuesta, la cual se
compone en la parte prealimentada por un controlador tipo P (compensador) y en la línea directa un controlador tipo PI (serial).
Figura 4-2 ,Estructura de control propuesta
Discretización 1
De acuerdo a la estructura de control de la Figura 4-2 se tiene que:
u = ufl turo
I 'I 50

Capítulo 4 Control PI neurodifuso de dos grados de libertad
Utilizando las siguientes aproximaciones:
sustituyendo en (4.2) y considerando:
Aun(k) = u#(k) -uü(k - 1) AUfi(k) = ~ f i ( k ) - ufi(k-1)
(4.3)
(4.4)
obtenemos:
k-' ] (4.5) [ ,=I
k
,=I A+) = k n r ( k ) + k , e ( k ) + k , T C e ( j ) - kn ' (k - l )+k ,e (k - l )+k ,TCe( j )
Au(k) = k#[r(k) - r(k -l)]+ k,[e(k) -e(k - l)]+ k,Te(k) (4.6)
Au(k) = k n b ( k ) +k,Ae(k) +k,Te(k) (4.7)
De acuerdo a (4.7), la Figura 4-3 muestra la estructura de control PI-2GL en su versión discreta.
................. \ Trayectoria
.........................................
, ..................... :.<..x ...................................................
Figura 4-3 Versión diseretal del PI-ZGL convencional
5 1

Capitulo 4 Control PI neurodifuso de dos grados de libertad
Las ganancias de los controladores Kn, K,T y Kp de la Figura 4-3 pueden ser reemplazados por
sistemas difusos como se muestran en la Figura 4-4.
Figura 4-4 Controlador PI-NDZGL con discretización 1
Discretización 2.
De acuerdo a resultados iniciales obtenidos en las pruebas de desempeño del PI-ND2GL, se
procedió a mejorar la discretización 1 del control PI-2GL para mejorar los resultados.
De acuerdo a la estructura de control de la Figura 4-2 se tiene que:
u = un +ufi
Un'=Kni
U f i = K p e + K, j e dt O
Utilizando las siguientes aproximaciones: .
(4.10)
52

Capitulo 4 Control PI neurodifuso de dos grados de libertad
sustituyendo en (4.9) y (4.10) y considerando:
A u f i ( k ) = u f i ( k ) - u f i ( k -1) u f i ( k ) = u f i ( k -1) + A ~ f i ( k )
obtenemos:
(4.1 1)
(4.12)
(4.13)
Aujb(k) = k,[e(k) -e(k -l)]+k,Te(k) (4.14)
h f i ( k ) =k,Ae(k)+k,Te(k) (4.15)
Uf = Kf r (k) (4.16)
De acuerdo a (4.15) y (4.16), la Figura 4-5 muestra la estructura de control PI-2GL en su versión
discreta2 mejorada. .
) Trayectona j predimetada
:
:
Figura 4-5 Versión discreta2 mejorada del PI-2GL
Las ganancias de los controladores Kff, K,T y Kp de la Figura 4-5 pueden ser reemplazados por
sistemas difusos como se muestran en la Figura 4-6.
!i 53

Capítulo 4 C O ~ ~ I PI neurodifuso de dos grados de libertad
Figura 4-6 Co&olador PI-NDZGL con discretización 2
4.2.2. Sistemas neurodifusos de la trayectoria retroalimentada
Para el diseño de los sistemas neurodifusos del PI-ND2GL se realizaron entrenamientos con 5 y 7 funciones de membresía (FM) tipo triangulares. Para ilustrar la generación de los SND del controlador PI-ND2GL sólo se presentará el caso con 5 FM.
Para la generación de los sistemas neurodifusos se utiliza la herramienta ANFIS (Adaptive
network based fuzzy inference system) de Matlab. Para el aprendizaje, ANFIS utiliza una red
adaptiva con una entrada una salida y 5 capas de neuronas como se muestra en la Figura 4-7. Una
vez que se realiza el entrenamiento (aprendizaje) con la red neuronal, M I S genera los sistemas
difusos (SD) K,, Kp y Kff correspondientes, indicando la configuración de éstos.
R%iar E n i d N I
Frcfor dr nomluaubn
Figura 4-7 Red adaptiva de aprendizaje con 5 capas
54

Capítulo 4 Control PI neurodifuso de dos grados de libemd
Sistema difuso K,. La trayectoria retroalimentada del controlador Pi-ND2GL se compone de dos
sistemas difusos, etiquetados como K, y Kp estos se observan en la Figura 4-6. La Figura 4-8
muestra el SD K,. El cual se compone de una entrada e(k) y una salida AUK,.
Figura 4-8 Sistema difuso &
El SD K,, contiene 5 FM del tipo triangular y 5 salidas del tipo constante (Sugeno orden cero)
ubicados como se muestran en la Figura 4-9. Este sistema es el inicial que calcula M I S , para la
alteración o modificación de los mapeos sólo se afectarán las salidas constantes.
salidas out1 -0.00083 out2 -0.00027
0.0013
10 -5 O S IO I S em) x l O J
Figura 4-9 Sistema difuso & con 5 FM triangulares
La Tabla 4-2 muestra el sistema de inferencia (base de reglas) del tipo si-entonces, con salidas o
consecuentes del tipo constante para el SD K,.
Tabla 4-2 Base de reglas del sistema difuso K, No.R Is
IFENTT'- . IF ENTl IF ENTl
4 IF ENTRADD 5 IF ENTRADA1
__ NAVAL ESFM. II.LvI.-I_I
RADAI ES FM2 ENTONCES SAL1 U D A I ES FM3 ENTONCES SAL1
ES FM4 ENTONCES SAL1 ES FlM5 ENTONCES SAL1
Sistema difuso K, El siguiente SD de la trayectoria retroalimentada del controlador PI-ND2GL es el etiquetado como Kp, este se observa en la Figura 4-6. La Figura 4-10 muestra el SD Kp. El
cual se compone de una entrada Ae(k) y una salida

Capítulo 4 Control PI neurodifuso de dos grados de l ibedd
Figura 4-10 Sistema difuso K,
El SD Kp contiene 5 FM del tipo triangular y 5 salidas del tipo constante como se muestran en la
Figura 4-1 1. Este SD es el inicial que calcula ANFIS por medio de la red de la Figura 4-7.
I P
O !
O M -8 -6 4 -2 o 2 4 6 Aefi)
salidas
-0.00051 0.001 1 0.0028
1 IO 4
Figura 4-11 Sistema difuso K, con 5 FM triangulares
La base de reglas del sistema difuso Kp es igual al que se presentó en la Tabla 4-2.
4.2.3. Sistema neurodifuso de la trayectoria preaiimentada (discretizaeión 1)
Para la generación del sistema neurodifuso Kff se utiliza la herramienta M I S de Matlab,
para el aprendizaje, ANFIS utiliza la misma red neuronal equivalente a la de la Figura 4-7.
Sistema difuso Kn. ídiscretización 1) El siguiente SD de la trayectoria prealimentada del
controlador PI-ND2GL es el etiquetado como Kff, es generado a partir de la discretización 1 que
se muestra en la Figura 4-4. La Figura 4-12 muestra el SD Kff. El cual se compone de una entrada
Ar(k) y una salida A&.
Figura 4-12 Sistema difuso Krr
56

0.5 out3 out4
O
o 0.05 0 1 o15 0 2 0 2 5 o 3 Ar@)
Figura 4-13 Sistema difuso KN con 5 FM triangulares
0.5 out3 out4
O
8 0'0s 8 i 01s 0 2 825 0 3 Ar@)
Figura 4-13 Sistema difuso KN con 5 FM triangulares
La base de reglas del sistema difuso Kff es igual al que se presentó en la Tabla 4-2.
4.2.4. Sistema neurodifuso de la trayectoria prealimentada (discretización 2)
Sistema difuso KR. (discretización 2) El siguiente SD de la trayectoria prealimentada del
controlador PI-ND2GL es el etiquetado como Kff, es generado a partir de la discretización 2 que
se muestra en la Figura 4-6. La Figura 4-14 muestra el SD Ke. El cual se compone de una entrada
r&) y una salida Ue. I'SISTEMA DIFUSO qc
Fuliñcanb"
Figura 4-14 Sistema difuso KR
El SD Kff contiene 5 FM del tipo triangular y 5 salidas del tipo constante como se muestran en la
Figura 4-15. Este SD inicial es el que genera ANFIS por medio de la red de la Figura 4-7.
salidas out1 0.W97 aut2 0.0136
o 5 out3 0.0176 out4 0.0215 out5 0.0255
o O .33 .4 ~ 4 5 .5 .JS .6 .65 .7 . I S .8 .ü5 r(k)
Figura 4-15 Sistema difuso K ~ c o n 5 FM triangulares
La base de reglas del sistema difuso Ke es igual al que se presentó en la Tabla 4-2.

Capítulo 4 Control PI neurodifuso de dos grados de libertad
4.3. Procedimiento de implantación del PI-ND2GL
El nombre Neurodifuso se define como Neuro (que utiliza una red neuronal para el
aprendizaje y optimización de acuerdo a los patrones de entrenamiento) y Difuso (conocimiento
aproximado basado en reglas de inferencia). La Figura 4-16 muestra el procedimiento general de
diseño del controlador PI-ND2GL. Indica los datos de entrada y salida obtenidos del PI
convencional, que en conjunto forman los patrones de entrenamiento. Estos patrones son
importados al modelo automatizado de ANFIS (red neuronal) de Matlab para ser entrenados y
obtener un sistema neurodifuso equivalente al desempeño del PI convencional. Después para
mejorar el desempeño, el sistema difuso, es ajustado finamente de forma manual (consecuentes
de las reglas) para así obtener un controlador neurodifuso modificado de alto desempeño.
Finalmente, por medio de una función de optimización fina, también es posible generar un
sistema difuso modificado para poder verificar el ajuste realizado de forma manual.
deenirada I
Patrones
inmnarioito
Modificado
Modificado
Figura 4-16 Procedimiento de diseño del PI-ND2GL
58

Capítulo 4 Control PI neurodifuso de dos @dos de libertad
4.3.1. Procedimiento de sustitución y mejora del desempeño
Una vez generados los sistemas difusos, se procede a programarlos en Matlab/simulink
utilizando el bloque Fuzzy logic controller. En este bloque se configuran los SD (K,, &, Kfi) que
son archivos con extensión *.fis. La Figura 4-17 muestra el módulo del controlador PI-ND2GL.
Debe de quedar claro que el módulo del PI-ND2GL ya está integrado con el modelo de la UTG
Figura 4-17 Estructura del control PI-NDZGL en Simulink
La Figura 4-18a muestra el sub-bloque de la trayectoria prealimentada, el cual contiene
configurado el SD KR,. La Figura 4-18b presenta el sub-bloque de la trayectoria retroalimentada
que contiene los sistemas difusos Ki y Kp.
Figura 4-18 (a) Sistema difuso KN. (b) Sistemas difusos Ki y K,
59

Capitulo 4 Control PI neurodifuso de dos grados de libertad
4.3.2. Diseño del PI-ND2GL
Para generar los sistemas difusos es necesario obtener patrones (datos) de entrada y salida.
Estos patrones son las entradas a la red neuronal que utiliza la herramienta de Matlab ANFIS. El
siguiente procedimiento es para la generación de los SND utilizando la herramienta ANFIS:
1. Realizar una simulación de la UTG para obtener los patrones de entrenamiento para Kfi,
Kp Y K,. 2. Con los datos de entrenamiento obtenidos, proceder a realizar el entrenamiento para cada
uno ellos por medio de ANFIS.
3. En la interfaz (IHM) ANFIS, importar los datos de entrenamiento.
4. Generar el sistema fis, numero y tipo de FM, y tipo de salida consecuentes.
5. Indicar el número de épocas para el entrenamiento.
6 . Dar el botón de inicio de entrenamiento (Train Now).
7. Verificar por medio de la opción de Test Now, como resultó el entrenamiento.
La Figura 4-19a muestra la curva de la relación de patrones de una entrada y una salida que
han sido cargados previamente a la herramienta de ANFIS. La Figura 4-19b presenta las curvas
de los patrones originales y la curva entrenada, adicionalmente, indica el error de aprendizaje.
!I
(a) (b)
Figura 4-19 (a) Importación de patrones de datos, (b) Sistema entrenado
60

Capitulo 4 Control PI neurodifuso de dos grados de libertad
La Figura 4-20a presenta la configuraciÓn.de las 5 funciones de membresia tipo triangulares
que de acuerdo al rango y valores de los patrones, la herramienta de ANFIS calcula este sistema
difuso. La Figura 4-20b muestra el grado de activación para las cinco reglas y valor de salida
dependiendo del valor de la entrada. Se utiliza defusificación tipo singleton para las salidas.
(a) @) Figura 4-20 (a) Sistema difuso generado, (b) Activación de reglas del SD
La Figura 4-21a indica el mapeo estático producto del resultado del entrenamiento de los patrones de entrada y salida. Finalmente la Figura 4-21b muestra la configuración de las reglas
del tipo si-entonces, con el antecedente y el consecuente respectivamente. Este sistema difuso se
guarda con la extensión *.lis; el cual contiene la configuración del SD en una variable tipo
61

Capítulo 4 Control PI neurodifuso de dos grados de libertad
4.3.3. Procedimiento de ajuste fino (manual)
Los mapeos pueden ser alterados directamente de forma manual o utilizando métodos
matemáticos de optimización. Para la sintonización manual del sistema difusos se realiza
modificando el valor de los consecuentes. 'Esta alteración de los mapeos debe ser realizada por
personal que tenga amplia experiencia en el proceso y control de UTG's. Mediante simulaciones,
poco a poco pueden modificarse los mapeos de los sistemas difusos y automáticamente tener un mejor desempeño del controlador PI neurodifuso no-lineal. La Figura 4-22a muestra el mapeo
original que se obtuvo del entrenamiento para el sistema difuso &f. La Figura 4-22b presenta los
mapeos alterados del mismo sistema difuso, en el cual se modificó el valor de dos consecuentes
de las reglas.
(a) (b)
Figura 4-22 (a) Mapeo original del SD, (b) Mapeo modificado
La Figura 4-23 muestra el procedimiento para la modificación de los mapeos de forma fina
manual. Los mapeos a modificar son los parámetros consecuentes que se localizan en el archivo
*As, por lo tanto se edita el archivo en cuestión, se localiza las salidas consecuentes y se van
modificando estos valores de acuerdo al procedimiento.
62

Capítulo 4 Control PI neurodifuso de dos grados de libertad
Paso 1
valores de IAE y
ver respuesta y valmes de IAE y
Arranca modelo e3
r - 5 Armnea modelo
Figura 4-23 Procedimiento de alteración de mapeos de forma manual
4.3.4. Procedimiento de verificación (ajuste fino Óptimo)
Una característica importante de todo controlador son los parámetros de sintonización.
Normalmente si el proceso es crítico, el controlador se sintoniza fuera de línea. Existen muchos
métodos de optimización para la sintonización de los lazos de control de un proceso que en la
mayoría de los casos, también se realiza fuera de línea. Estos métodos matemáticos arrojan
excelentes resultados, pero debido a la complejidad como se diseñaron tardan horas para terminar
su tarea. También durante la ejecución de estos métodos ocurren puntos singulares que tienden a
desestabilizar el sistema, debido a esto, no son muy utilizados en línea sobre los procesos.
Para el trabajo de tesis se implemento un programa matemático para modificar los mapeos,
específicamente los consecuentes de las reglas utilizando una función de optimización llamada
lsqnonlino del toolbox de optimización de Matlab. Esta fidción se basa en el método de mínimos cuadrados y es multiobjetivo. El programa principal se compone de Tunepi.m y
F-costo.m. En el programa Tunepi se declaran las variables globales del modelo de la UTG, se
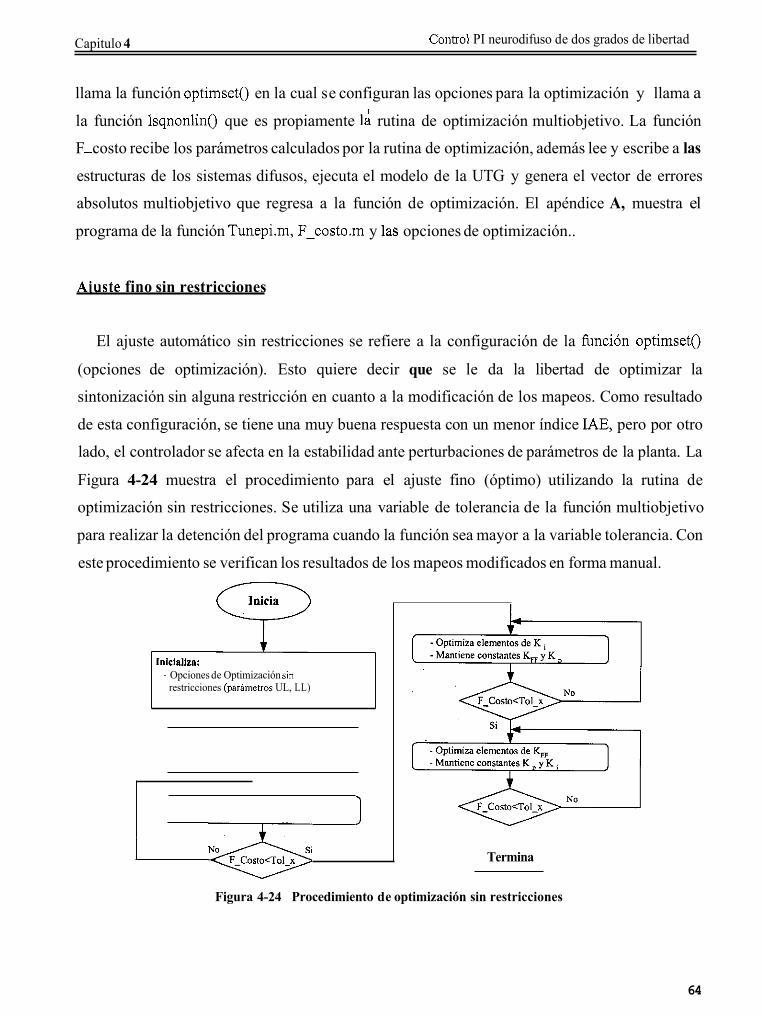
Capitulo 4 Canto1 PI neurodifuso de dos grados de libertad
llama la función optimseto en la cual se configuran las opciones para la optimización y llama a la función lsqnonlin() que es propiamente 1: rutina de optimización multiobjetivo. La función
F - costo recibe los parámetros calculados por la rutina de optimización, además lee y escribe a las
estructuras de los sistemas difusos, ejecuta el modelo de la UTG y genera el vector de errores
absolutos multiobjetivo que regresa a la función de optimización. El apéndice A, muestra el
programa de la función Tunepim, F-cost0.m y 1 s opciones de optimización..
1 " i C i d i U X - Opciones de Optimización sin
restricciones (parimetroi UL, LL)
Aiuste fino sin restricciones
El ajuste automático sin restricciones se refiere a la configuración de la función optirnset()
(opciones de optimización). Esto quiere decir que se le da la libertad de optimizar la
sintonización sin alguna restricción en cuanto a la modificación de los mapeos. Como resultado
de esta configuración, se tiene una muy buena respuesta con un menor índice ME, pero por otro
lado, el controlador se afecta en la estabilidad ante perturbaciones de parámetros de la planta. La
Figura 4-24 muestra el procedimiento para el ajuste fino (óptimo) utilizando la rutina de
optimización sin restricciones. Se utiliza una variable de tolerancia de la función multiobjetivo
para realizar la detención del programa cuando la función sea mayor a la variable tolerancia. Con
este procedimiento se verifican los resultados de los mapeos modificados en forma manual.
Termina
Figura 4-24 Procedimiento de optimización sin restricciones
64

1 Capitulo 4 .I ~ . . ~
..' I
El ajuste automático con restricciones sé refiere a configurar la función optimset() (opciones
de optimización) en los parámetros de nive1,alto (UL) y bajo (LL). Esto. quiere decir que el vector
de salida que calcula la función 1sqnoniinO ehmitado para el cálculo de alteración de mapeos de
los sistema difusos. Con esta restricción, se g+rantizan mapeos positivos (rectas positivas) y con
esto se obtiene buena respuesta en el que.de la UTG con índices IAE aceptables y se
incrementa la capacidad de seguimiento y re haz0 a perturbaciones.
!:,
utilizando la rutina de
función multiobjetivo
para realizar la detención del programa cuan \la función sea mayor a la variable de tolerancia.
~- Control PI neurodifuso de dos grados de libertad
' ' ides de Modelo
Figura 4-25 Procedimiento d optimización con restricciones 1;:
.. I ' 65 _ -

Expenmentos y análisis de resultados Capitulo 5 I I
CAPÍTULO 5 I 1 i I I[
EXPERIMENTOS Y ANÁLISIS DE'RESULTADOS 1 l. '
I I"
l 1 . p En este capítulo se presenta el resymerj de las pruebas realizadas a nivel simulación para la
evaluación del desempeño y estabilidad dei:controlador PI-ND2GL en la fase de arranque de una
UTG, comparándolo con el PI convencional. La Sección 5.1 describe la plataforma y ambiente de
simulación de pruebas en PC. La Seccion:: 5.2 presenta las pruebas de simulación del PI
convencional con el modelo de la UTG resaltando los eventos críticos que suceden durante la
etapa de arranque. La Sección 5.3 rnuestia las pruebas de arranque de la UTG utilizando el
control PI-ND2GL. La Sección 5.4 preseihalas pruebas utilizando el controlador PI-ND2GL
modificado. La Sección 5.5 muestra el PI-ND2GL seleccionado paia pruebas comparativas con el
PI convencional. La Sección 5.6 indica1 la comparación de resultados de estabilidad y desempeño
mediante simulaciones de arranque de la UTG, utilizando el PI convencional y el PI-ND2GL.
I. '
1 : I
1 ' ! I
I , ; I ;
' 1 1 .
1 '(
.,
1 , "i 61 , ,
0 I ' . , I
1 1 ' 1
I I '
5. EXPERIMENTOS Y ANALISIS DE RESULTADOS I
1 I ¡ , I : 5.1. Ambiente de Simulación y Pruebas en PC.
La plataforma utilizada para la realización de las pruebas es una computadora personal con las
1 ' I 'i j ,,
siguientes características: I . I , ' ' i
> Procesador Intel Pentium I 4 :I: I
9 Disco duro de 40 GB 1 f i 1 / > Velocidad de 2.0 GHz ' h
I ' b 9 Memonade256Ml3 i
I f ' 1 t ' , El ambiente de simulación utilizado 'es el software de Matlab versión 6.0 y respectivas
herramientas: 1 '
66

Expenmentos y análisis de resultados 1
Capítulo 5 1 I
> Sirnulink I '! i
> Tolbox Optimización 1 l j l
1 :I;;: que conforman el PI-ND2GL se utilizó el I programa ANFIS de Matlab. Para la sintonización del
en un progrba de línea de comandos de
k Tolbox Fuzzy Logic (ANFIS) ' :! / ; :
El modelo de la UTG-5001 y la integración'del control, PI-ND2GL están programados en el
ambiente gráfico de Simulink. Para el diseño'de los sistemas difusos (entrenamiento de datos) I !
PI-ND2GL (alteración de los mapeos) de iforma . , áutomática, se utilizó la función 1sqnonlin.m del
I , ! I
I I .I :I.
'l.
toolbox de optimización, siendo ésta
Matlab.
q I : I i ! j : i
La Figura 5-la muestra el medio ambiente de Matlab y la Figura 5-lb, el ambiente gráfico de
simulación Simulink. I "
Figura 5-1 (a) Software.de I ' Matlab, (b) Software de Sirnulink I ', . I ' I ) I:
1 i r I ; / ! I
I L . :. 1 I I ;
i ,i La Figura 5-2 indica la programación 'del modelo de la UTG GE-5001 en Sirnulink. Se
localizan los bloques principales como son < el bloque de control, el cual contiene embebido el
bloque del control de velocidad, control de:,carga y control de temperatura. El bloque de
secuenciador contiene los permisivos y1 condiciones para la secuencia de arranque de la UTG. El bloque de proceso que contiene progrpmadas. las ecuaciones que representan al proceso de la
I /
I '.
UTG. I ;i
61

Experimentos y análisis de resultados Capitulo 5 I
Figura 5-2 Model; de la UTG GE-5001 1 ' ' I!,
También para,ejecutar las simulacion's , de . laUTG, ., se localizan los botones de activación de la
simulación: arranque en i30 (condiciones iniciales de modelo), Fuzzy (configura PI-ND2GL),
encendido de motor y menú de fallas ((pembaciones). En el bloque de control se encuentra
integrado el PI-ND2GL, el cual se compone de un controlador llamado feedforward (FF) en la
trayectoria prealimentada y un controlador llamado feedback (FB) en la trayectoria , , .~ .
I ' 111
retroalimentada (Figura 5-3). I
Figura 5-3 Estructura del control PI-ND2GL I ?: 68

I : :
Experimentos y análisis de resultados Capitulo 5 i
Dentro de estos bloques FF y FB se encue4tran embebidos los sistemas difusos Kff, (Figura 5-4a)
y los sistemas difusos K,, y Kp (Figura 5-4b) en versión discreta. I / /
Kff
Controllei
Figura 5-4 (a) Sistema difuso Km, (b) Sistemas difusos K, y I<p I ' t: I : :!:
I ' I
I - : I ;
I ! I ' - 1 ; :
5.2. Pruebas de arranque de UTG con el RI-1GL convencional
Para realizar las pruebas de simulaión del arranque de la UTG utilizando el control PI
convencional de un grado de libertad ' (PI 1 GL), es necesario una versión discreta para ser
implementado en equipo digital. La Figura 5-5 muestra el PI-1GL discreto.
~
Para las pruebas de simulación con el PI 1GL en el arranque de la UTG se graficaron las
variables de referencia y velocidad. Con; la ayuda gráfica se analiza el desempeño del controlador
para el buen seguimiento de la variable velocidad hacia la curva de referencia y el rechazo a perturbaciones. Además del analisis.grdico, siutilizaron índices de IAE y EC. Con la ayuda del
IAE, se mide el comportamiento del error acumulado entre la variable referencia y la velocidad
(seguimiento) en todo el rango de tiempo de~;la simulación. Con el índice del EC se tiene el
comportamiento del esfuerzo de la se511 de control que se le aplica al elemento final de control durante todo el rango de arranque de la UTG. ,
/I:
I 11
~ I '
1 ' , /I,
!
69

Experimentos y análisis de resultados Capítulo 5 I ,
IH
_ _ !
jj. !Irqr Re*- I I-',: l i IlOCi"/. 11 IL ' i ' '
Figura 5-5 Controlador PI-1GL convencional
! La Figura 5-6a muestra el arran
con parámetros de sintonización en
seguimiento de la velocidad a la c
controlador. El punto 1 indica la a
rampa de aceleración 1920 rpm (
control como una perturbación en
zando el controlador PI-1GL configurado
ación de O a 300 segundos. Se observa el
ia y 'el rechazo a perturbaciones por éste
or de arranque, el punto 2 el inicio de la
pendiente, este evento es tomado por el
/ I I
: I El punto 3 indica la salida de sedicio ¿Iel motor de arranque 2160 rpm(36 rps). Este evento
también es visto por el control comb y a pe<urbación, también como en el punto anterior, el
control debe tener la capacidad de rechazar esta perturbación y mantener el buen seguimiento
evitando las desviaciones de la velocidad y la referencia en lo posible.
' I I / ' 'i
I !/ I I j
El punto 4, es el cierre de las válvulas de sangrado y apertura de alabes guía 4920 rpm (82
rps). Físicamente al momento de estajacción, toda la masa de aire del compresor entra a la cámara
de combustión y a la turbina manifestánd0se;tal efecto en un descenso de la temperatura y un incremento en la velocidad de la unidad. Este efecto es crítico debido a que puede rebasar los
límites de disparo por sobrevelocidad, entonces el control debe rechazar esta perturbación y regresar la velocidad de la unidad d aherho al valor correspondiente a la curva de referencia en
ese momento. El punto 5, es un evento de cambio de la pendiente 5100 rpm (85 rps) de la curva
I I . d ! I , r
I' I : I
I
. I " , I '
70 ' I
I ,

de referencia conocido como velocidad d) sincronismo, por lo tanto el, control debe tener la
capacidad de un buen seguimiento de la Lelocidad a la referencia. I ' ' I También presenta los valores obtenidos de los índices del controlador PI-IGL. Un IAE =
2968.8 y un EC = 611.1. Estos valoied servirán de referencia para ser comparados con el
controlador PI-ND2GL. La Figura 5-6b pr,,senta la señal de error y cambio del error. I
4s
(a) 1 1 . ' (b) Figura 5-6 (a) Arranque d l la UTG con PI-IGL, (b) Error y cambio del error 1 1
, 1 ' : '
I i ]
La Figura 5-7a muestra la señal de control~PI convencional, y la Figura 5-7b el comportamiento
de la temperatura de gases de escape (TGE) y presión de descarga del compresor (PDC). Se
observa que la TGE queda por debajo @i límite de disparo por alta temperatura de la UTG que es
de (565.5OC).
I I
I 1
: ; j 'I ; ........... ; ........... : ........... : ........... :
, , , . . /
(b) ' I
I
(4 Figura 5-7 1 (a) Señal de control, @) TGE y PDC
71

Experimentos y análisis de resultados Capítulo 5 I
I
I , i 5.3. Pruebas de arranque de UTG con el PI-ND2GL
1
Cuando nos referimos al controlador PI-ND2GL, significa que está formado por tres sistemas
difusos iniciales Kr, K, y K p respectivamekte. Estos sistemas difusos fueron diseñados a partir de
los patrones de entrenamiento del PI-lG/ convencional realizando el entrenamiento por medio
de la herramienta ANFIS. Al tener dichos sistemas difusos iniciales es posible modificarlos para
tener sistemas difusos que mejoren aún más la respuesta en el arranque de la UTG.
I
1 I /
Las pruebas que se realizaron del PI-hl2GL fueron con SD que dieron mejores resultados
con 5 y 7 FM tipo triangular, reglas dell tipo (si-entonces) y salidas constantes tipo singletons.
Para la comparación con el PI-1GL solamente se presenta el mejor que fue con 7 FM. El PI-
ND2GL por estar compuesto con una estructura de control de dos grados de libertad y ser
neurodifuso, puede ser sintonizado para tldo el rango de operación del arranque de la UTG.
1
5.3.1. PI-ND2GL inicial con 7 funciones de membresía I
La Figura M a , muestra el arranqie de la UTG con el controlador PI-ND2GL inicial
configurado con 7 FM y 30 épocas de ebtrenamiento. En la respuesta del controlador se obtiene
un IAE=2512.8 y un esfuerzo de control EC=620.1, y tiene mejor desempeño que el PI
convencional. La Figura 5-8b presenta la señal de error y cambio en el error. I
Sanal de m o i y cambio del emr 2
PLNDGL (7 FM]
g o E
-2
tiempo LSSS)
co) Figura 5-8 (a) Controlador PI-NDZGL con 7 FM, (b) Error y cambio del error
I
PLNDGL (7 FM]
Figura 5-8 (a) Controlador PI-NDZGL I
Sanal de m o i y cambio del emr 2
g o E
-2
tiempo LSSS)
co) I con 7 FM, (b) Error y cambio del error
I , : '
I i / / 12

Capítulo 5 I Experimentos y análisis de resultados
I
La Figura 5-9a muestra la respuesta de la señal de control y la Figura 5-9b muestra el
comportamiento de la TGE y PDC. Se observa.que la TGE queda por debajo del límite de disparo
por alta temperatura de la UTG que es de (565.5"C)
I I , '
Ssfisl ds c ~ n t d I . , 2 Tsmpsrstura de gises de 16capey Pisaibn daacricga mmprsior
IDO is0 200 250 Irn k m p 0 [*es) tiempo (ssg)
( 4 . I CD) Figura 5-9 (a) Señal de control, (b) TGE y PDC
I / 1
5.4. Pruebas de arranque de UGT con el PI-ND2GL modificado
Se define como controlador F'I-N!32dL modificado al controlador que se obtiene de alterar los
sistemas difusos en sus salidas consecuentes de las reglas (mapeos) a partir de un PI-ND2GL
inicial. Estas modificaciones en los map,eos I se les llama sintonización del controlador, puede ser realizada de dos formas: la pnmera es alterando los mapeos de forma fina manualmente y la
segunda con un programa en computadora de forma automatizada. I
5.4.1. Pruebas de arranque cdn el PI;ND2GL modificado (sintonización manual) I
PI-ND2GL modificado con 7 FM I
i La Figura 5-loa muestra la respuesta del PI-ND2GL sintonizado finamente en los mapeos de forma manual (a prueba y error) con 7 IFM. Se obtiene un índice de IAE=2136. La Figura 5-lob presenta la señal de error y cambio dellerror. La Figura 5-1 l a presenta el desempeño en la señal
de control con un EC=612.6 y la Figufa 5-1 Ib el comportamiento en la señal de TGE y la PDC. I
73 , I I
I

Capítulo 5 I Experimentos y análisis de resultados
I Se observa que la TGE queda por debajo idel límite de disparo por alta temperatura de la UTG que es de (565.5OC)
I I PWü2GL rnodhrldo (I FM. rimoniisii6n minus0
gm .......... ; ........... ; ...... ~ _ . . ~ i _ . ~ ........ . .......... i .......... !
PWü2GL rnodhrldo (I FM. rimoniisii6n minus0 Sd.1 da e m r y rimbio di1 error
,iernpo (q)
(b) LNDZGL modificado, (b) Error y cambio del error
I
I ,ismpo (SP8)
I I
Figura 5-10 (a) Arranque de UTG con PILN
,iempo (q)
(b) 'DZGL modificado, (b) Error y cambio del error
5.4.2. Pruebas de arranque cdu el PI-ND2GL modificado (sintonización Óptima) I
PI-ND2GL modificado con 7 FM 1
I La Figura 5-12a muestra la respuesta del PI-ND2GL sintonizado finamente en los mapeos de
forma automática (programa en codputadora). Con este controlador se obtiene un índice
IAE=1662.6. La Figura 5-12b presenla la señal de error y cambio del error. La Figura 5-13a I
74

Experimentos y análisis de resultados Capitulo 5 I
presenta el desempeño en la señal del control con un EC=615.9 y la Figura 5-13b el
comportamiento en la señal de TGE y lalPDC. Se observa que la TGE queda por debajo del
límite de disparo por alta temperatura de ia/UTG que es de (565.5"C).
I
I / 1 : . . ,
.__ ~ ._._ 1 ................................... .....................
' ....... ; ...................... 1 4ooot. .......... : ...................... ; #-
Figura 5-12 (a) Arranque de UTG d n PI-ND2GL modificado, (b) Error y cambio del error I
Figura 5-13 (a) Señal de control, (b) TGE y PDC
5.5. Controlador PI-ND2GL seleccionado !
I La Tabla 5-1 muestra los resultados obtenidos de pruebas del PI convencional y de los
controladores neurodifusos iniciales diseñados, sintonizados de forma manual y de forma
automática. Se observa que los diseños iniciales, presentan los mismos valores de ME debido a
I . I . . .
I 75 . , . 'I . . I ,

Experimentos y análisis de resultados Capitulo 5 1
I El mejor diseño de PI-ND2GL modificado con (7 FM, 7 salidas de consecuentes constantes y 7
reglas del tipo si-entonces), será el utilizddo en las pruebas de simulación y comparación con el
PI convencional. Quedó configurado en sus sistemas difusos Kp, K, y Kff como se muestra en la
Fibra 5-14, Figura 5-15 y Figura 5-16 respectivamente. I .
! Sistema difuso I(p:
-10 -8 -6 -4 -2 o 2 4 6 8 10 A@)
Sistema difuso K:
Figura 5 14 Sistema difuso K, I - '
1
0.5
O
-.O1 -.O08 -.O06 -.OM -.O02 O ,002 .O04 .O06 1008 .O1 'e(k)
I Figura 5-15 Sistema difuso K, I

Capítulo 5 Experimentos y análisis de resultados
I
I Sistema difuso Krr:
4 I I FMZ FM3 FM4 FM5 FM6
1
0.5
O
O .35 .4 .45 .5 .55 .6 .65 .7 .75 .E 3 5
Base de reglar del SD í, No. I Regla
Figura 5-?6 Sistema difuso K,, I
5.6. Comparación del PI-convencional vsi PI-ND2GL modificado I
Como se indicó en la sección 5.5, el PI-f(lD2GL modificado con 7FM, será el utilizado en las
pruebas de simulación para evaluación del'control de velocidad de la UTG. Además, este mismo
controlador neurodifuso se comparará con el PI convencional mediante pruebas de simulación
con la UTG. I
Para la comparación en la evaluación de la respuesta en el arranque de la UTG con los
controladores PI convencional y el PI-T2CiL modificado, además de la figura principal de
arranque, se presentan acercamientos en las zonas de la salida de servicio del motor de arranque a
las 2160 rpm y en la zona de cierre de vál+ulas de sangrado y apertura de alabes guía en las 4920
rpm, los cuales se consideran las perturbaciones mas críticas en el arranque de la UTG.
I
I I
La Figura 5-17a muestra la comparación de la respuesta en el arranque de la UTG con los controladores PI convencional y PI-NDZGL. A simple vista no se observan las diferencias en las curvas, para facilitar esto, se utilizan los índices iAE yEC. Para el PI convencional se tiene un
IAE=2968.8 y un EC=611.1. Para el PI-ND2GL se tiene un iAE=1662.6 y un EC=615.9, es
evidente que el PI-ND2GL tiene una mejor respuesta al seguimiento y al rechazo a I
perturbaciones. La Figura 5-17b presenta la comparación de las señales de control. I
I 77

Capítulo 5 Experimentos y análisis de resultados
I 1
La Figura 5-18a muestra un acercamiento de la zona de salida del motor de arranque, se
observa que el PI-ND2GL tiene mejor seguimiento a la referencia de velocidad respecto al PI. La
Figura 5-18b presenta la zona de cierre de/ vilvulas de sangrado, se observa también que el PI-
ND2GL responde mejor ai seguimiento y a/ rechazo a perturbaciones respecto al PI. I
SC PI ~ o w i n ~ i o n s l 4 . SC PLNCRGL
liPrnP0 beg)
(b)
O n im tn an 2yi tiempo [se@
(a) Figura 5-17 (a) Comparación del desempeño'del PI y el PI-NDZGL, (b) Señal de control
70 80 90 IM 110 im 1% 200 x15 210 215 220 m 230 liimpa ee8) I tiempo @reg1
(4 íb) Figura 5-18 (a) Acercamiento zona de motor de arranque, (b) Cierre válvulas de sangrado
La Figura 5-19a muestra la comparadión, de la señal del error de los controladores PI convencional y PI-ND2GL, se observa'que son muy similares. La Figura 5-19b presenta la comparación con la señal de cambio del error entre los dos controladores. I
78

Capítulo 5 . I ..! Experimentos y análisis de resultados
I Cambia m o l enor
o YI im 150 H I 250 300 uimpo (519) 1
o>) o
tiempo (reo)
(a) Figura 5-19 (a) Comparación de señal de error, (b) Comparación del cambio del error
I ' .
La Figura 5-20a muestra la comparación l e la temperatura de gases de escape (TGE) entre los
controladores PI convencional y PI-ND2GL. La TGE queda por debajo del límite de disparo
(565.5 "C). La Figura 5-20b presenta la comparación de la presión de descarga del compresor
I
i ( P W . I
@) I (a) Figura 5-20 (a) Comparación de la TGE, (b) Comparación de la PDC
j I
~
5.6.1. Evaluación de la estabilidad ,del PI-NDZGL
Para evaluar la estabilidad del PI-ND2GL se realizan simulaciones de arranque de la UTG. Se
adicionan perturbaciones simuladas en un,rango de tiempo del arranque con el fin de comprobar
que el controlador responde exitosamente! y rechaza estos disturbios. Esta perturbación se mide
I9 I
, ' i
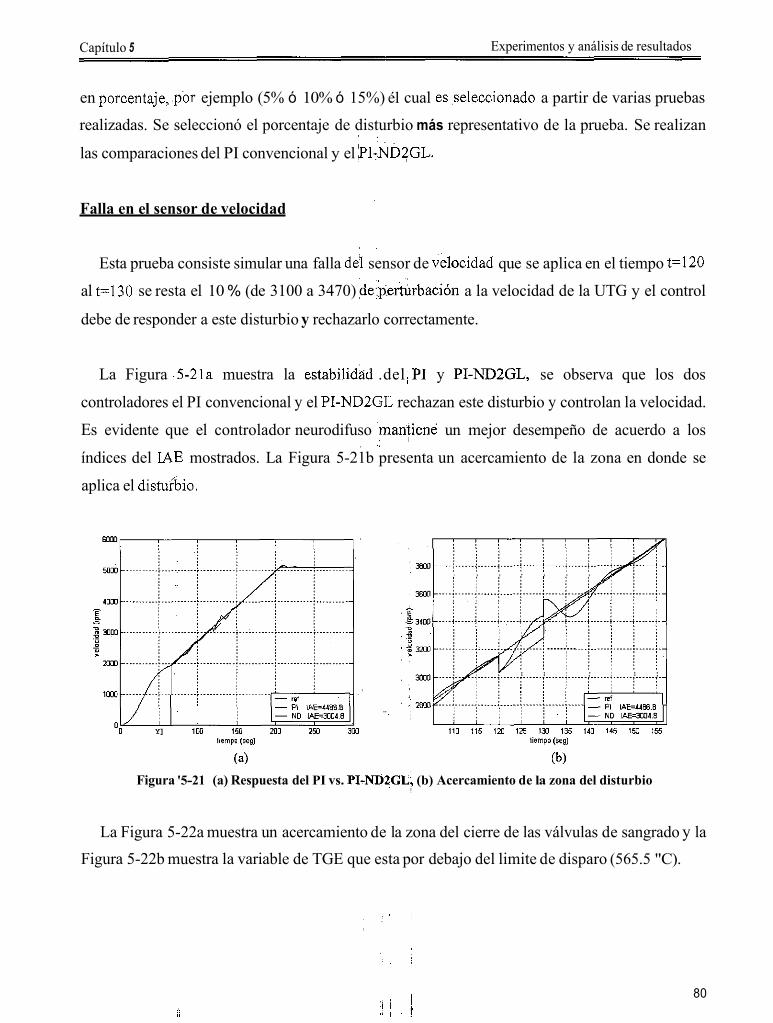
Capítulo 5 Experimentos y análisis de resultados
en porcentaje,.por ejemplo (5% ó 10% ó 15%) él cual es.seleccionado a partir de varias pruebas
realizadas. Se seleccionó el porcentaje de disturbio más representativo de la prueba. Se realizan
las comparaciones del PI convencional y el pI-ND2GL. , .
, . Falla en el sensor de velocidad
, .
Esta prueba consiste simular una falla del sensor de vc..cidad que se aplica en el tiempo t=120
al t=130 se resta el 10 % (de 3100 a 3470) de.pe&bación . . a la velocidad de la UTG y el control
debe de responder a este disturbio y rechazarlo correctamente.
La Figura .5-21a muestra la estabilidid .del ¡PI y PI-ND2GL, se observa que los dos
controladores el PI convencional y el PI-ND2GL rechazan este disturbio y controlan la velocidad.
Es evidente que el controlador neurodifuso 'manTiene un mejor desempeño de acuerdo a los
índices del IAE mostrados. La Figura 5-21b presenta un acercamiento de la zona en donde se
aplica el disdbio.
, .,
, , , . , , , , , . . I < ,
, , , , < , ,
, , , ,
, , . . . , I . . .
......... ~.~ ........................ , , , , , , , . . , , , . ,
, . . , . < , , . . .
,
' ..
Y] im 150 mo 2y1 301, 110 $15 120 125 ia 1% 140 146 is0 in Iiernpo ('09) 1iernpo (6W)
(4 (b) Figura '5-21 (a) Respuesta del PI vs. PI-NDZGL, (b) Acercamiento de la zona del disturbio
!
La Figura 5-22a muestra un acercamiento de la zona del cierre de las válvulas de sangrado y la Figura 5-22b muestra la variable de TGE que esta por debajo del limite de disparo (565.5 "C).
80

Capítulo 5
I I "
Figura 5-22 (a) Acercamiento en zona de válvulas sangrado, (b) TGE
Experimentos y análisis de resultados
I La Figura 5-23a presenta la comparación de la señal de control del PI y el PI-ND2GL SUI la
perturbación, y la Figura 5-23b muestra la comparación de la misma señal de control de los dos
controladores pero con la perturbación a la velocidad. Es evidente de acuerdo al índice del
esfuerzo de control que el PI-ND2GL tiene (m menor esfuerzo respecto al PI. I
SC PI c~meocioOd SC PWD2GL
im 150 200 xo m
Figura 5-23 (a) Señal de control sin dislurbio, (b) Señal de control con disturbio
Ruido en la medición de velocidad I Esta prueba consiste simular un ruido bastante grande del 2% en la medición de velocidad que
se aplica en todo el rango de simulación de la UTG y el control debe de responder a este disturbio y rechazarlo correctamente. La Figura 5-2ba muestra la estabilidad del PI y PI-ND2GL, se
. . 81

Capítulo 5 Experimentos y análisis de resultados
. i
observa que los dos controladores el PI convencional y el PI-ND2GL rechazan este ruido en la
medición y controlan la velocidad. Es controlador neurodifuso mantiene un mejor desempeño de
acuerdo a los índice de IAE. La Figura 5-2. presenta un acercamiento del arranque de la UTG,
se observa la oscilación representativa del dido1
i '
1 :
I gm ' I
, . . . , . . . .
. . , , , , , , . , , , . . , . , , , . , , ! I !
,___.__ > ..... < ...... :.,- , . , . , I , . , . . . , , . . , < . .
, , , , , , , , . , , , , ,
o 91 im i w 20) EO mi IO 80 SI im i i o im iza 110 im im ir0 l iPrnQ0 (IBQI
~
tiempo (sed
( 4 I o>) Figura 5-24 (a) Respuesta del PI vs. PIINDZGL, @) Acercamiento de la zona del disturbio
I
i La Figura 5-25a muestra un acercamiento &e la zona del cierre de las válvulas de sangrado, se
observa que el ruido afecta a los dos controladores. La Figura 5-25b muestra la variable
temperatura de gases de escape que esta por debajo del limite de disparo 565.5 "C.
1
(a) l (b) Figura 5-25 (a) Acercamiento Ln zona de válvulas de sangrado, (b) TGE
La Figura 5-26a presenta la comparación de la señal de control del PI y el PI-ND2GL sin el
ruido, y la Figura 5-26b muestra la comparación de la misma señal de control de los dos
controladores pero con el ruido en la medición de velocidad.
82

Capítulo 5 I Experimentos y análisis de resultados
Falla de baia presión del gas combustible
SC PI romnrionrl m. SC PLND2GL 50 1
Esta prueba consiste en simular una falla del sensor de presión del gas aplicado en el tiempo
t=130 al t=160, se resta el lo.% (de 11 14 a 1080) de perturbación a la presión del gas a la UTG y
el control debe de responder a este disturbio y rechazarlo correctamente. La Figura 5-27a muestra
la estabilidad del PI y PI-ND2GL, se observa claramente que los dos controladores rechazan este
disturbio y controlan la velocidad de manera satisfactoria. Se observa de acuerdo al índice del
ME que el PI-ND2GL es mejor respecto al PI para rechazar este evento. La Figura 5-2713
presenta un acercamiento de la zona del disturbio.
I
I I I
m
. .
im 110 120 111 140 150
(b) I I
Y] 1M 150 ñ10 250 M1 ,ismpo (se$
(a)
Figura 5-27 (a) Respuesta del PI vs. PI-NDZGL, (b) Acercamiento de zona de disturbio
83
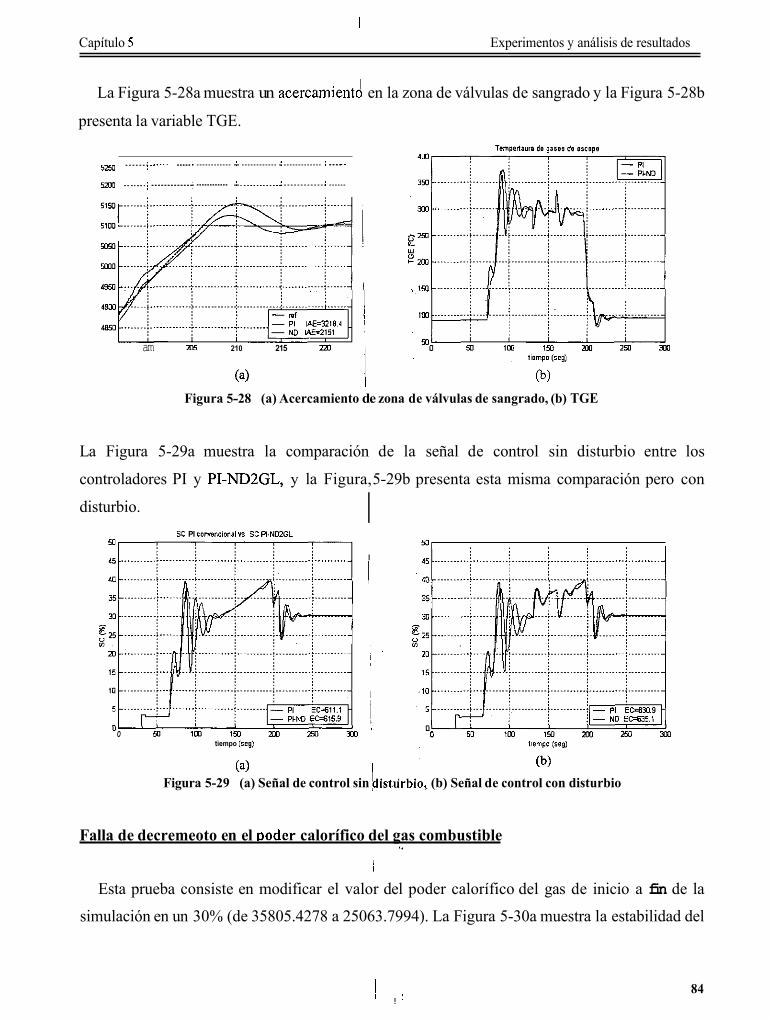
I Capítulo 5 Experimentos y análisis de resultados
La Figura 5-28a muestra un acercamientd en la zona de válvulas de sangrado y la Figura 5-28b
presenta la variable TGE.
5250 ....... j _..... ~~ ..... ; ............ I ............ < ............. : .... ~~
.......; ............. 1 ............ I .__.______.. 2 ............. : ......
am 210 215
(a) co) Figura 5-28 (a) Acercamiento de zona de válvulas de sangrado, (b) TGE
La Figura 5-29a muestra la comparación de la señal de control sin disturbio entre los
controladores PI y PI-ND2GL, y la Figura, 5-29b presenta esta misma comparación pero con
disturbio. I SC PI comsnciond *s SC PI-ND2GL
I
I
1 . [
O ~ 1 i m i s o m 2 5 0 m tiempo (reg)
6 ) l
50,
Figura 5-29 (a) Señal de control sin !disturbio, (b) Señal de control con disturbio
Falla de decremeoto en el Doder calorífico del gas combustible I I*
1 Esta prueba consiste en modificar el valor del poder calorífico del gas de inicio a fin de la
simulación en un 30% (de 35805.4278 a 25063.7994). La Figura 5-30a muestra la estabilidad del
I 84 1 , , '

Capítulo 5 Experimentos y análisis de resultados I
PI y PI-ND2GL, los dos controladores rechqan .el 'disturbio y controlan la velocidad
correctamente. La Figura 5-30b presenta un Lcerbamiento de la respuesta de velocidad. !
, , , , , , , ,
. . , , , , , . . . . . . . . . . . . . . . . . . , , . I , ,
. . . . , , . , , . , , . , . . , < . , . .
.............I ......,... , < . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . , < . , < . , < .
.....................
- PI lAEiCU926
m 70 80 90 100 110 i m im 140 is^
@) Figura 5-30 (a) Respuesta del PI vs. PI@GL, (b) Acercamiento en zona de disturbio
La Figura 5-31a muestra un acercamiento de la zona de válvulas de sangrado y la Figura 5-31b
muestra la TGE. 1
XO aB5 210 215 Zü M
(a) @) Figura 5-31 (a) Acercamiento de, zona de válvulas de sangrado, (b) TGE
La Figura 5-32a muestra la comparacid del comportamiento de la señal de control sin
disturbio entre los controladores PI y PI-ND2GL. La Figura 5-32b presenta la señal de control con disturbio, esta es mayor debido a que se disminuyó el poder calorífico del gas y por lo tanto,
se demanda más flujo de combustible para poder mantener el seguimiento de la velocidad.
85

! Experimentos y análisis de resultados Capítulo 5 ,
. , , SC PI romenrionsl w. SC PI-ND2GL
oi) Figura 5-32 (a) Señal de control sinldistiirbio, (b) Señal de control con disturbio
5.6.2. Pruebas de cambio de parámetros de planta
Para evaluar la no inestabilidad del P I - h 2 G L se realizan simulaciones de arranque de la
UTG. Se modifican parámetros de la planta, Con 10 cual se puede considerar que ha cambiado la
dinámica del proceso pudiendo considerarse que es otra planta. Estas pruebas de simulación son
con el fin de comprobar que el controlador no presente singularidades ante cambios en los parámetros del proceso. 1
Alteración del parámetro Eficiencia de la UTG
Esta prueba consiste en modificar la variable eficiencia de la UTG de principio a fin de la
simulación. Se decrementa en un 10% (de 0.6108 a 0.5108) y el control debe de responder a este
cambio de parámetro del proceso. !
La Figura 5-33a muestra la no inestabilidad del PI y PI-ND2GL, es claro que los dos
controladores tienen buen desempeño y controlan la velocidad. La Figura 5-33b presenta un
acercamiento de la velocidad ante el disturbio generado. 1 I
86

Experimentos y análisis de resultados Capítulo 5 I
1, ' >
. . < , . .
, . . , . . , . . .......,....... < .......(....... . . . .
co) Figura 5-33 (a) Respuesta del PI vs. PI;,NDZGL, (b) Comparación de seiiales de control
La Figura 5-34a muestra un acercamiento de ia zona de cierre de válvulas de sangrado y la Figura
5-34b presenta la vanable de temperatura de gases de escape. Puede observarse que el valor de la
temperatura se encuentra por debajo del límite de disparo por alta temperatura que es de 565.5 "C.
5250 ....... : ............ : .......... ~. : . .~~ .... ~ . . . L .......... : .........
....... ; ............ : ............ : ............ : ............ : .........
Figura 5-34 (a) Acercamiento de 1; zona de válvu as de sangrado, @) TGE
La Figura 5-35a muestra el comportamiento de 1 las señales d 1 control de los dos controladores sin I
disturbio. La Figura 5-35b presenta la señal de control co disturbio, se observa que es mayor manda de combustible es mayor. debido a que tiene una eficiencia mas baja y pol! lo tanto la
1
87
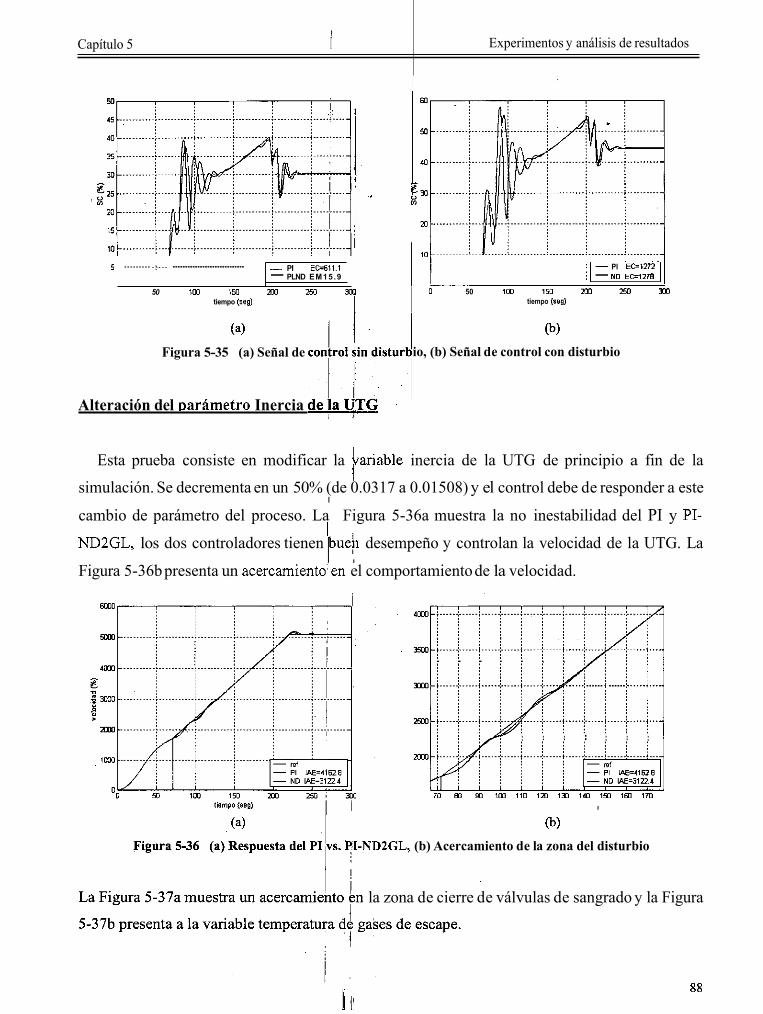
! Capítulo 5 I Experimentos y análisis de resultados
(4 @) Figura 5-35 (a) Señal de io, (b) Señal de control con disturbio
Alteración del Darámetro Inercia
5 ......... ~ : . ~ ~ .............................
Esta prueba consiste en modificar la bariable inercia de la UTG de principio a fin de la
simulación. Se decrementa en un 50% (de 0.0317 a 0.01508) y el control debe de responder a este
cambio de parámetro del proceso. La Figura 5-36a muestra la no inestabilidad del PI y PI-
ND2GL, los dos controladores tienen bueb desempeño y controlan la velocidad de la UTG. La
Figura 5-36b presenta un acercamiento'en el comportamiento de la velocidad.
I I
I I :
, . . I . . . .
. . . . . , ,
_._; ...... 8 ...... : ___.__/.__ , , . , , , . , , , . . , , , < . . I , . . , . . , . . . , . , . . . , . . . . .
, , , . , , , , . . . , . ,
< , . .
@) -NDZGL, (b) Acercamiento de la zona del disturbio
la zona de cierre de válvulas de sangrado y la Figura
~ - PI EC=1271 j - ND E(F1178
PI E M 1 1 . 1 - PLND EM15.9 -
I I 11 il
i 50 im iw am 250 tiempo (sed
88
o 50 im IYI m 250 xa tiempo (Beg)

Capítulo 5 Experimentos y análisis de resultados
I ! I 52yI ... : ............ : ............ L ........... L ........... : ............ :.. t i i i j
..; ............ ; ............ ............ ~ ............................
215 120 225 230 235 240
Figura 5-37 (a) Acercamiento en zona de válvulas de sangrado, (b) TGE
La Figura 5-38a muestra el comportamiento de las señales de control de los dos controladores sin
disturbio. La Figura 5-38b presenta la señal.de control con disturbio, se observa que es mayor
debido a que tiene una inercia mas baja y por lo tanto la demanda de combustible es mayor. SC Plmmnrionals. SCPLND2GL
o 50 100 1 5 0 2 u 1 2 5 0 1 0 LiemQD (sen) LiomQo ( O W )
( 4 @) Figura 5-38 (a) Señal de control sin disturbio, (b) Señal de control con disturbio
RESUMEN DE RESULTADOS
La Tabla 5-2 presenta el resumen de resultados de la evaluación del PI convencional vs. el PI- ND2GL. Se observa que en la mayona de las pruebas realizadas el PI-ND2GL tiene mejor desempeño respecto al PI convencional. En la prueba 1, representa un arranque normal de la
89 _-.- - -
- --

CaDítUlo 5 Exuerimentos v análisis de resultados
UTG en el cual de acuerdo al IAE, el controlador PI-ND2GL es mejor que el PI convencional.
Las pruebas siguientes, resumen la adición de perturbaciones externas en los sensores y en
parámetros críticos de la planta. Se observa que el arranque de la UTG se afecta de forma
considerable, pero de igual forma, los dos controladores se comportan de forma satisfactoria
rechazando dichas perturbaciones.
Tabla 5-2 Resumen de pruebas del PI convencional VS. el PI-NDZGL

- - - - - - I . . . . ___
Capíiulo 6 Conclusiones
CAPÍTULO 6
CONCLUSIONES
6. CONCLUSIONES
En la Sección 6.1 se presentan las conclusiones y sumario de este trabajo de investigación. En
la Sección 6.2 se numeran las aportaciones del trabajo de tesis. En la sección 6.3 se enlistan las
sugerencias para trabajos futuros de investigación.
6.1. Conclusiones
En este trabajo de tesis se presentó el diseño de un controlador PI neurodifuso de dos grados
de libertad para el control de velocidad en la etapa de manque de una UTG. El controlador
neurodifuso se propuso como una opción de solución a la necesidad de contar con un controlador
que proporciona mas recursos (seguimiento y rechazo a perturbaciones) en el arranque de una
UTG. Todas las pruebas realizadas de evaluación de desempeño y sintonización del controlador
PI-ND2GL se realizaron a nivel simulación.
La investigación inició con el conocimiento del proceso de la UTG GE-5001, la etapa de
arranque y la estrategia de control basada en un algoritmo PI convencional. Posteriormente se
definió la estructura de dos grados de libertad con un control P en la trayectoria prealimentada y un control PI en la trayectoria retroalimentada. Una vez definida la configuración del controlador, se realizó la discretización para su implementación en equipo digital, seguido de la generación de los patrones de entrenamiento para así continuar con el diseño de los sistemas neurodifusos
mediante la herramienta ANFIS de Matlab. Después, se evaluó el controlador PI neurodifuso para
observar la factibilidad y desempeño equivalente con respecto al PI convencional. Una vez
generado el PI neurodifuso inicial, se configuró y sintonizó de forma manual y automática obteniendose un PI neurodifuso modificado para mejorar más el desempeño respecto al PI

Cauítulo 6 Conclusiones
convencional. Finalmente, se realizó la comparación del desempeño del PI y el PI-ND2GL
modificado analizando la respuesta de seguimiento y rechazo a Perturbaciones por medio de
simulaciones (gráficas de arranque) y cálculo de índices de IAE y EC.
No se incluyó el análisis de estabilidad en forma analítica, para validar esto, se realizaron
pruebas de simulación que demostraron que el sistema es estable. Se simularon perturbaciones y
cambio de parámetros de planta, comparando el desempeño de los controladores PI y PI-ND2GL.
Queda demostrado que el PI neurodifuso proporciona más recursos en el control de velocidad
de una UTG. Tiene un mejor seguimiento a cambios en la referencia y un mejor rechazo a
perturbaciones respecto al PI convencional. Es más fácil de sintonizar y por ser difuso, se
sintoniza para todo el rango de operación de la UTG.
Con base en el trabajo desarrollado y en los resultados obtenidos se concluye que se cumplió
con el objetivo de la tesis, debido a que se generó como producto final un controlador de
velocidad del tipo PI neurodifuso que puede ser aplicado directamente en sustitución de un
controlador PI convencional, en el control de velocidad de una Unidad Turbogás GE-5001 sin
impactar negativamente el desempeño y la respuesta de la unidad.
El trabajo y metodología de diseño desarrollada en el trabajo de tesis, proporciona un soporte
base para la continuación de futuras investigaciones de diseño de sistemas de control que utilizan
técnicas de control neurodifusa.
6.2. Aportaciones
Las aportación de este trabajo de investigación y desarrollo constituye una solución a la necesidad tecnológica planteada en la Sección 1.2, describiéndose en los siguientes puntos:
i Se obtiene un controlador PI neurodifuso de dos grados de libertad con mayores
recursos en comparación con el controlador PI convencional. Esto se considera como una aportación debido a que el controlador PI-ND2GL es un diseño original con
92

Capítulo 6 Conclusiones
caractensticas propias inéditas, el cual resuelve la problemática planteada en esta tesis
de manera satisfactoria.
9 Un procedimiento de diseño del controlador PI-ND2GL, el cual se considera una
aportación debido a que permite automatizar el diseño de los sistemas difusos,
evitando errores por diseño manual (ensayo y error). k Procedimiento de sintonización manual que permite incorporar el conocimiento o
experiencia directamente para el ajuste de parámetros del controlador, aplicable en la
práctica.
k La formulación del problema de mejoramiento del desempeño como un problema de
optimización. De esta manera el problema puede ser resuelto por una computadora y la
solución permite mejorar caractensticas especificas de la operación durante el
arranque de la UTG, lo cual es prácticamente imposible de resolver en forma analítica.
P Al ser el controlador neurodifuso, permite ser sintonizado en todo el rango de
operación en el arranque de la UTG.
P Se difundieron los primeros resultados de la tesis en un evento nacional [Castelo, et
al., 20041.
6.3. Sugerencias para trabajos futuros
Con base a la experiencia obtenida durante el desarrollo del trabajo, se sugiere seguir
explorando lo siguiente:
Comparar el controlador PI-ND2GL con otros tipos de controladores, empleando métodos
altemativos de control, por ejemplo: control PID autosintonizable, control PID de ganancias programadas, control predictivo basado en modelos, etc.
Explorar otros métodos de optimización para mejorar el desempeño del controlador, por
ejemplo, algoritmos genéticos.
93

Referencias I I I I
REFERENCIAS
Astrom, K and Hagglund, T.(1995).”PID Controllers: Theory, Design and Tuning”. Segunda edición, editorial ISA. 1995 USA.
Carretero, M., De Lara, S., Garduño, R., y Libreros D. (2001) “Sistema para desarrollo y validación de algoritmos de control para turbinas de gas”. 14a. RVP-AV2001 del IEEE, Acapulco, México, julio 2001.
Carretero, M. (2002)’;r)esarrollo de un controlador prealimentado neuro-dif..o tipo ANFIS para una unidad turbogás”. Tesis maestría, E”-ESIME, México, D.F, 2002.
Castelo, L., Garduño, R., Quintero, E. (2004) “Control de Dos Grados de Libertad para el Arranque de un Turbogenerador“ 17a. RVP-AIí2004 IEEE. Julio 2004. Acapulco Gro. México
Castelo, L., De Lara, S., Garduño, R., Sánchez, M. (2002) “Plataforma Experimental para el Desarrollo de Nuevas Tecnologias de Control con Calidad Industrial” 15a. RVP-AV2002 IEEE. Julio 2002. Acapulco, Gro. México
Chávez, R. y Gómez, O. (1995) “Sistemas de control distribuido en plantas de ciclo combinado”. Boletín IiE. Vol. 19, No. 2, págs. 51 (1995).
De Lara, S., Carretero, M. (2001) “Ambientepara desarrollo y validación de algoritmos de control para turbinas de gas ”. Documento interno iIE/11983/I002/P/DC/AXNX (2001).
Delgadillo, M., y Chávez, R. (1990) “Modernization of a computer control system in a combined cyclepower plant ’I. Octubre 1990. Proceedings ISA International Conference N. Orleáns. USA.
Delgadillo, M. (1992) “Guía de operación del control automático de las turbinas degas”, CCC, Dos Bocas Veracruz. Documento interno IIE, 1992
Díaz, R., y Chávez, R. (1993) “Upgrading of a computer control system in a combined cycle powerplant”. Proceedings Power-Gen Americas ’93. Vol. 12-13, pags. 55-62. Noviembre, 1993.
García,, C.D. (1997) “Control Digital de Unidades Turbogás”. Tesis de Maestría. Centro Nacional de Investigación y Desarrollo Tecnológico, Cuemavaca. 1997.
I
I García, C., y Garduiío, R. (1997) “Gas turbinefizzy speed control”. 1997, Proceedings tnd Joint Mexico-USA International Conference on Neural Networks and Neurocontrol. Sianka’an.
Garduño, R., y Sánchez, M. (1995) “Control system modernization: Turbogás unit case study”. Diciembre 1995. Proceedings IFAC Symposium on Control of Power Plants and Power Systems. Vol. 2, págs. 245-250. Cancún, México..
Halgamuge and Glesner, M. (1993) “The fuzzy neural controller FuNe II with a new adaptive defuzzziJication strategy based on CBAD distributions”. In European Congress on Fuzzy and I

Referencias
intelligent Technologies’93. aachen alemania. Vol 2. págs. 852-867 (1993).
Jang, R., and Sun, T. and Mizutani, E. (1997) “Neuro Fuzzy and Soft Computing”, Prentice Hall.
Miller, Ashley y Johnson (2004) “Controlador MARK V” General Electric Power http://www.gepower.com/prod~serv/products/tech~docs/e~do~loads/ger3658d.pdf
Naucke, D, y Klawonn, F. (1997) “Fundations of neurofuzzy systems”. Ed. John Wiley, Francia.
Ogata Katsuhiko. (1 974) “Ingeniería de control moderna ”. Primera edición, Prentice Hall 1974
’Pat, M., y De Lara, S. (1999) “Sintonización con redes neuronales de un controlador PID. Aplicación a una unidad turbogás”. información Tecnológica. Vol. 10, No. 6, pags. 25-32
“Prospectiva del Sector Eléctrico 2001 -201 O ”. Dirección General de Formulación de Política Energética Secretaría de Energía, primera edición 2001.
Ramírez, G. M. (1996) “Modernización del control de velocidad, potencia y temperatura de una unidad turbogás”. Tesis de Licenciatura, IPN, D.F, México (1996).
Sánchez, M., Garduno, R., y Chávez R. (2001) “Centrales de Ciclo Combinado”. Boletín IIE, Volumen 25, No. 6, noviembre-diciembre 2001.
Sánchez, M., Bahamaca, L. (1999) “Realización de controladores lógicos difusos para el control de procesos en tiempo real”: 2” Encuentro Nacional de Computación. Pachuca, México.
Sánchez, M., De Lara, S., Bahamaca, L. (2002) “A Fuzzy-Logic Rule Based Speed and Load Controller For Combustion Turbines in Power Generation”. Proceedings of American Control Conference (ACC). Mayo 2002. Anchorage, Alaska
Sugeno, M. (1985) “An introduction survey offuzzy control. Inform”. Sci. Vol 36, No 1.(59-83).
Taguchi, H., And kaki , M. (2000) “Two Degree of Freedom PID Controllers (Their Functions and optimal tuning)” IFAC digital control, Past, present and future of PID control, Terrassa, Spain 2000 (91-96).
Takagi, H., and Hayashi, I. (1991) ‘“A-driven fuzzy reasoning”. Int. Approximate Reasoning Vol. 5,N0.3 págs. 191-212 (1991).
Uram, R. (1976) “Computer Control in a Combined Cycle Power Plant part II. The Digital Gas Turbine System ”. IEEE power generation committee. November 1976.
Villagán, Y. (2003) ”Desarrollo de un controlador hibrido neurodifuso del tipo PIpara el control de una unidad turbogás”, Tesis maestría, IPN-ESIME, México, D.F, 2003
95

Apéndice B Función de optimización
APENDICE A. Función de optimización
Función Tunepim
%SUBPROYECTO: CAPITULO 4 %NOMBRE DE ARCHIVO: Tunepim
% % %AUTOR LUIS CASTELO CUEVAS % CENIDET-IIE
%DESCRIPCION: EJECUTA RUTINA DE OPTIMIZACI~N, CALCULA LOS PARAMETROS DE SINTONIZACION DE LQS'MAPEOS DEL SND. REClBE EL VECTOR DE DATOS DE LA FUNCIÓN OBJETIVO F-costom
%REVISION: 1 (JUN10/04) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
fprintf(?nhhW); fprintf('Cargando Datos de sirnulacion'); itera=l: X-IAE=[]; X-EC=[]; C_KP2=[]; C_Ki=[]; c-KPI=[];
%Paramems optimos calculados par mtina de optimizacion
Kpl=readfis(kp 1 .fis'); Yodifuso prealimentado Kp2=readfis(l<p2.fis'); %difuso retroalimentado Ki=readfis('ki.fis'); Yodifuso retroalimentado
% margenes de paramems
%limites ! a l ~~~~~~ ~ ~~
% uL=[o.óio.o8 0.1 0.11 0.21; % LL=[ O 0.01 0.07 0.08 O.OS]; %Limites kp2 y ki
UL=[-0.0007 O 0.00080.005 0.009 -0.0002 O 0.W1 0.0018 0.003 0.060.08 0.1 0.11 0.21; LL=[-0.03 4.01 -0.0008 O 0.003 4.002 -0.001 4.0003 O 0.001 O 0.01 0.07 0.08 0.081;
PA-INI=[Kp2.output(l).mf(l).paiams Kp2,autput(i).mf(2).params Kp2.output(l).mf(3).params Kp2.output(I).mf(4).params Kpi.output(l ).mf(S).patams ,... Ki.output(l).mf(l).params Ki.output(l ).mf(2).params Ki.output(l).mf(3).params Ki.output(1 ).mf(4).params &.output( I).mf(S).params, ... Kpl .output(i).mi(i).params Kpl .output(l).mf(2).params Kpl .output(i).mf(3).param Kpl .output(l).mf(4).pa~ams Kpl .output(l).mf(S).params];
oplims = optimset('largeScale',",'Displa~~it~';TolX,l .Oe-9,'TolFun',l .Oe-9,.. 'Levenber~arquardt','on');
parametro = Isqnonlin(@F~COSTO.PA-INI,LL,UL,oprions); %cm reshcciones
fprintf('D0NE'); fprintfc\nW); fprintf(lSimulacion en prog~eso ..... ..please wait');
Valgrol-3; SC-OMTO I =O.O; cem0.0; M_mr>--l;
. .
uno=l.O; ENT-ANT4.O; disri?C.l.>>>>Motor de Arranque');
96
-------.

Apéndice B Función de optimización
~~
fp?in;f(?nuiinui'); fprintf('L0S PARAMETROS OPTIMOS DEL CONTROLADOR PI SON.....');
Función F costom
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . %PROYECTO : TESIS MAESTRIA %SUBPROYECTO: CAPITULO 4 %NnMRRF nF ARCHIVO. F enBom ." ~ ~ - . . ..... ... ?JDtS.CRiPC.i6U FJF.CU1A 6. MODEI.0 DE L A CTG COS I OS SUF.\'OS VALORES DE % I~ARiMETR0SQI:li G\I.CCIA IJ\ tLNCIOh 1I.SCPI M,COSl'ltKE I i % VECTOR DE F S C I Ó N COSTO OUE ES EL ERROR MULTIOBJETNO %AUTOR: LUIS CASTELO CUEVAS % CENIDET-IIE
Va-prol-3; SC OMTOl4.0; - cerF0.0; M-uno=-l; ""Fl.0; ENT-ANT4.0; disp('C.l.»»Motor de Arranaue'): ARR=I.O; ValPro-Fio-lv3;
assignin('base','kp2c1',Kp2.output(l).mf(l).params); assignin('base'.l<p2c2',Kp2.output(l).mf(2).params); assignin(hase',l<p2c3',Kp2.output(l ).mf(3).params); assignin('base'.kp2c4',Kp2.output(l).mf(4).params); assignin('base',lcp2c5',Kp2output(l).mf(5).params);
assignin('base',locl ',Ki.output(l).mf(l).params); assignin('base'.l<ic2',Ki.autput(l).mf(2).p~ram~); assignin('base'.'kic3',Ki.o"tp"t(l).mf(3).params); assignin('base'.lowi',Ki .autput(i).mf(4).params); assignin('base'.lokS,Ki.autput(l ).mf(5).params);
assignin(base',l<plcI',Kpl .output(i).mf(i).params); assignin~base',l<plc2',Kpl .output(i).mf(2).params); assignin('base'.'kple3',Kpl .output(l).mf(3).params); assignin('base',l<plc4',Kpl .output(i).mf(4).params); assignin(%ase'.l<pl cS',Kpl .output(i ).mf(5).params);
Kp2=readfis(l<p2,fis'); %difuso remoalimentada Kp2 Ki-readfis(l<i.fis'); %difusa remoalimentado Ki Kpl=readfis(Xpl .es'); %difuso prealimentado Kpl
Kp2.autput(l).mf(l).pa~ams=paramema(l); KpZ.autput(l ).mf(2).params=parametro(2); Kp2.autput( I).mf(3).params=parame~~(3); Kp2.oufput( I).mf(4).params=parameh-a(4); Kp2.autput( I).mf(5).params=parameüo(5);
Ki.output(l).mf(l).params=paramemo(6); Ki.output(l).mf(2).params=parametro(7); Ki.output(1 ).mf(3).params=parametro(8); K¡.output(l) .mf(4) .pams=p~~~m~U~(9); Ki.autput( I).mf(5).params=paramebo(IO);

NOI3VZlurILdO aa SliNOI3dO
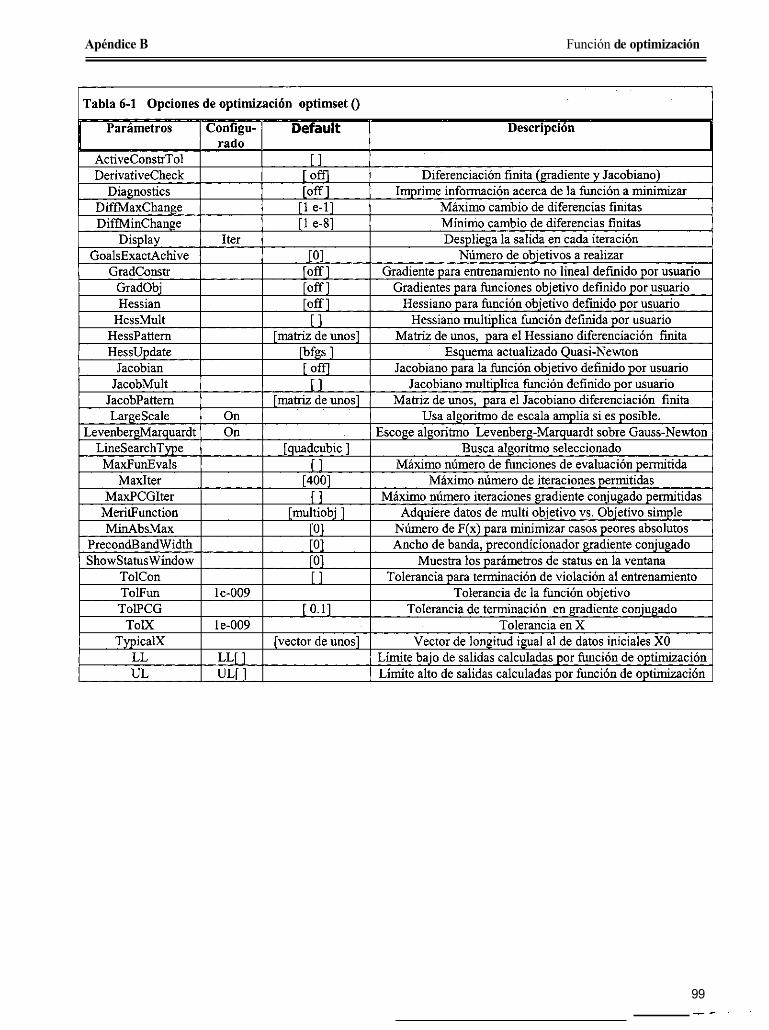
Apéndice B Función de optimización
99 -

RESUMÉ
Luis'casteio Cuevas.
Nació en Cuemavaca Morelos, México; el 20 de septiembre de 1968. Ingeniero mecánico
egresado de la Facultad de Ciencias Químicas e Ingeniería por la Universidad del Estado de
Morelos (UAEM). En 1993 ingresó al IIE. Actualmente se desempeña como investigador de la
Gerencia de Control e Instrumentación. Tiene amplia expenencia en la modernización y diseño
de sistemas de control en centrales de generación eléctrica de CFE. Ha participado en la
especificación de paquetes de licitación para la modernización de plantas de proceso en refinerías
de PEMEX. Su interés se centra en el estudio y desarrollo de estrategias de control moderno
(Neurodifuso) implementados en plataformas comerciales (PLC's) y en la integración de sistemas
digitales. Ha publicado artículos en revistas y congresos nacionales e internacionales. Mail: