Máquinas CC
21
Máquinas CC •Corrente eléctrica alternada •Electromagnetismo •Transformadores •Máquinas corrente contínua •Máquinas corrente alternada •Outras máquinas
-
Upload
fletcher-hampton -
Category
Documents
-
view
33 -
download
0
description
Máquinas CC. Corrente eléctrica alternada Electromagnetismo Transformadores Máquinas corrente contínua Máquinas corrente alternada Outras máquinas. 1,5 V +. V B. R. 1,5 V +. V B. V B. R. R. I ≈ 0. fem i ≈ V B. V B. fem i. I. V B. R. Para V B constante :. I ≈ 0. - PowerPoint PPT Presentation
Transcript of Máquinas CC

Máquinas
CC
•Corrente eléctrica alternada
•Electromagnetismo
•Transformadores
•Máquinas corrente contínua
•Máquinas corrente alternada
•Outras máquinas
VB
R
1,5
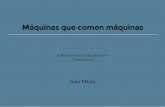
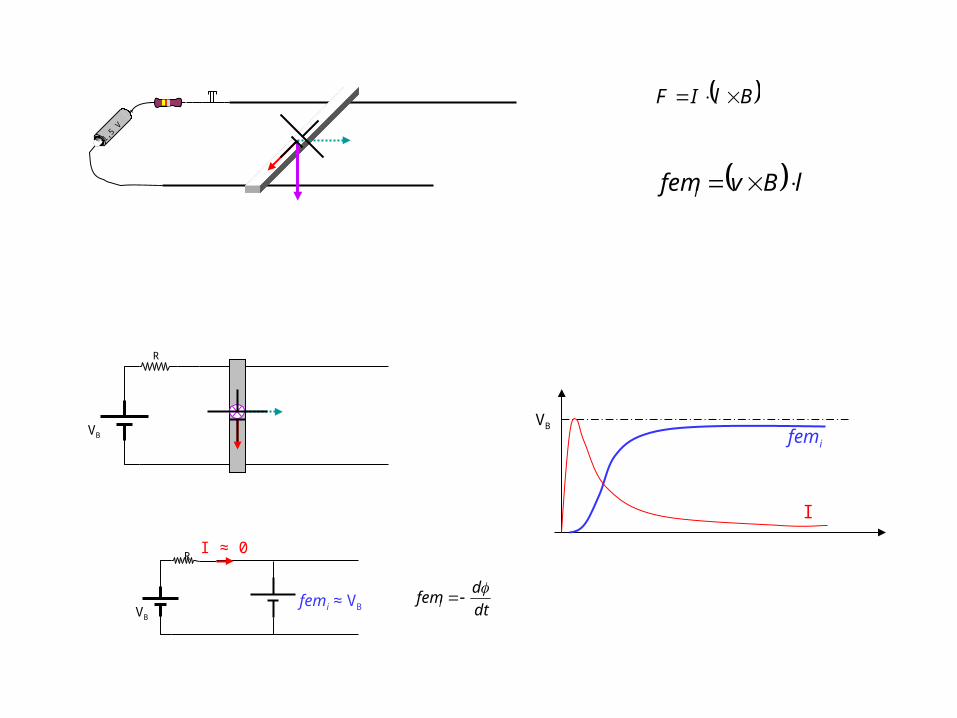
V + BlIF
VB
R
1,5
V +
BlIF
lBvfemi
VB
femi
I
VB
R
femi ≈ VB
I ≈ 0
dt
dfemi

R
femVi
femRiV
iB
iB
femi ii
femi = VB i = 0
0v
0ifem
R
Vi B
ilBF
existe F
0v
vBlfemi
Para VB constante :Bl
Vv B
lBvfemi )(
R
femVi iB
dt
dvmamF ..
0ifem
(a barra está inicialmente parada)
VB
R
femi ≈ VB
I ≈ 0
femi com v

v
FcargaFindFind
v
Find
v
Máquina CC, com variação de carga (Motor)
Fresultante = Find - Fcarga
amF . v
lBvfemi .. femi
B iV femI
R
I
BliF .. F
O sistema volta a uma situação de repouso (Fresult = Find) mas com uma velocidade menor
v
Find
v
Find
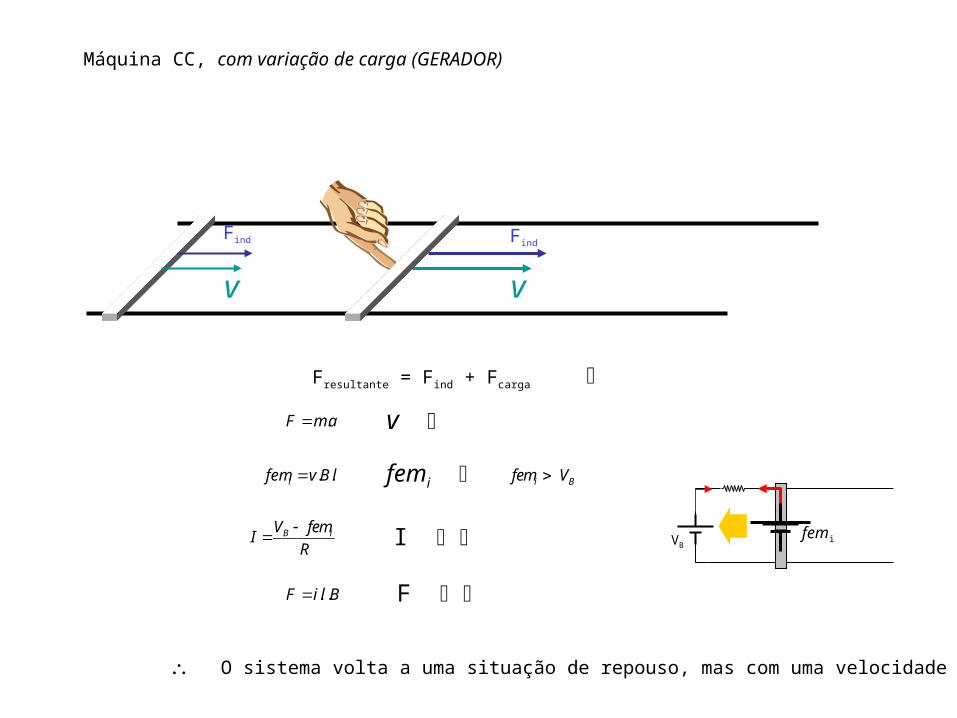
Fresultante = Find + Fcarga
Máquina CC, com variação de carga (GERADOR)
amF . v
lBvfemi .. femi
B iV femI
R
I
BliF .. F
i Bfem V
O sistema volta a uma situação de repouso, mas com uma velocidade maior
femiVB

1,5
V +
Motores de deslocamento linear não são de fácil construção / aplicação
F
F

a
c
b
d
vcd
vab
m
B
v
l
+
_
a
b
B
l
v
_
+
Colocando uma espira num tambor e girando este (GERADOR)
2.v.B.l (face ao fio) = 0 (resto)
lBvfemi )(

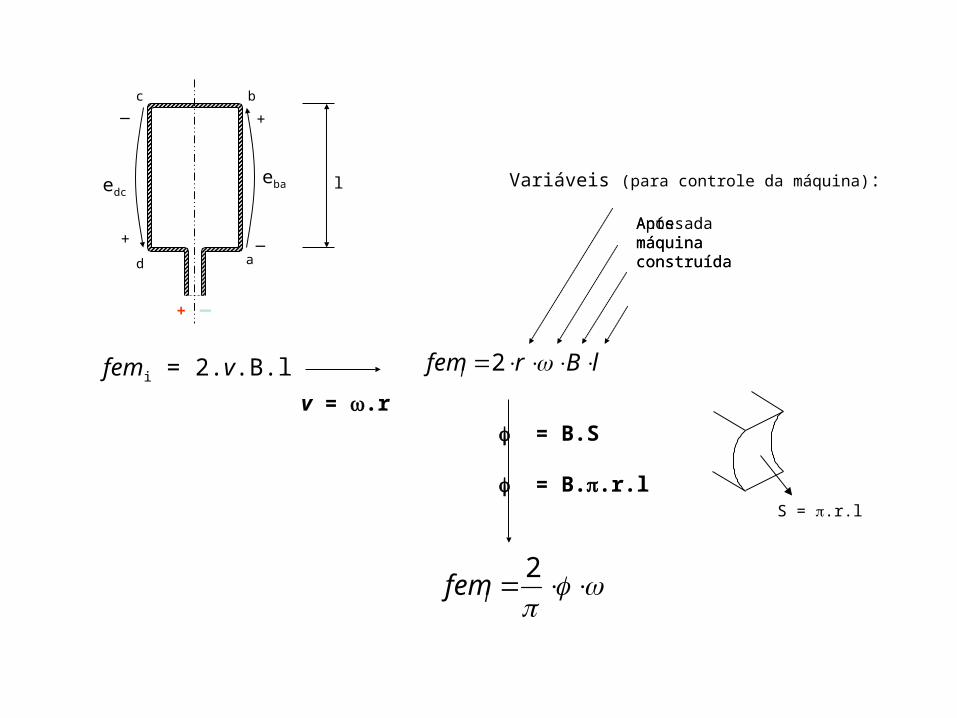
S = .r.l
femi = 2.v.B.l
v = .r
= B.S
= B..r.l
lBrfemi 2
2
ifem
edceba
a
c b
d
+
+_
_
+ _
l
Após amáquinaconstruída
Antes damáquinaconstruída
Variáveis (para controle da máquina):

rotaçãocarga
Escovas[estacionárias)
Anéis
espira
femi
t
+ femi
– femi
Transformação de algo móvel em algo fixo
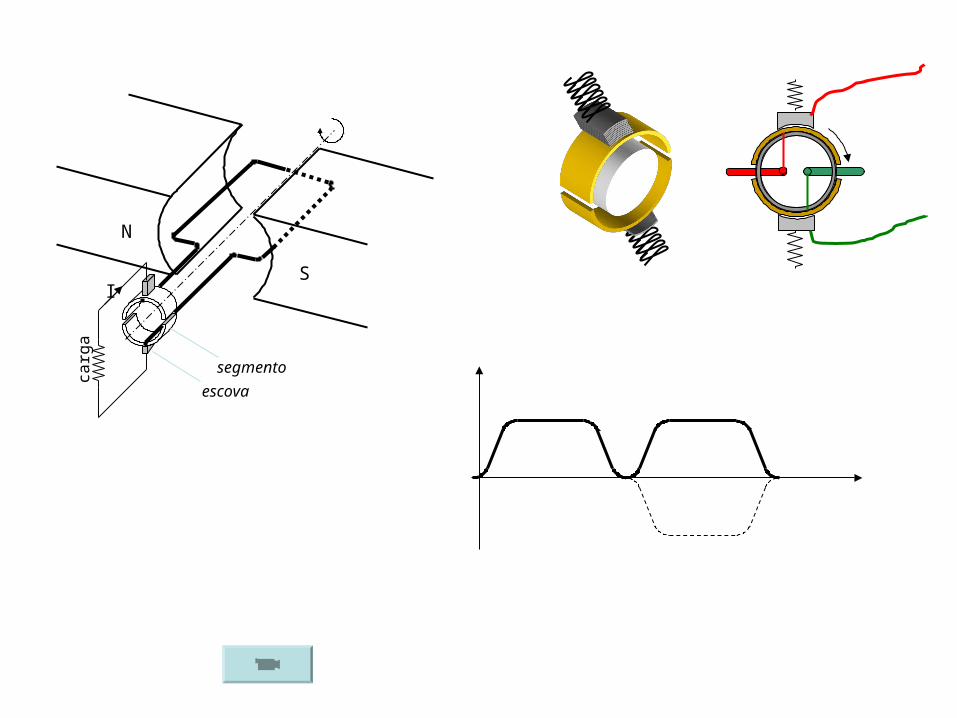
N
SI
carg
a
segmento
escova
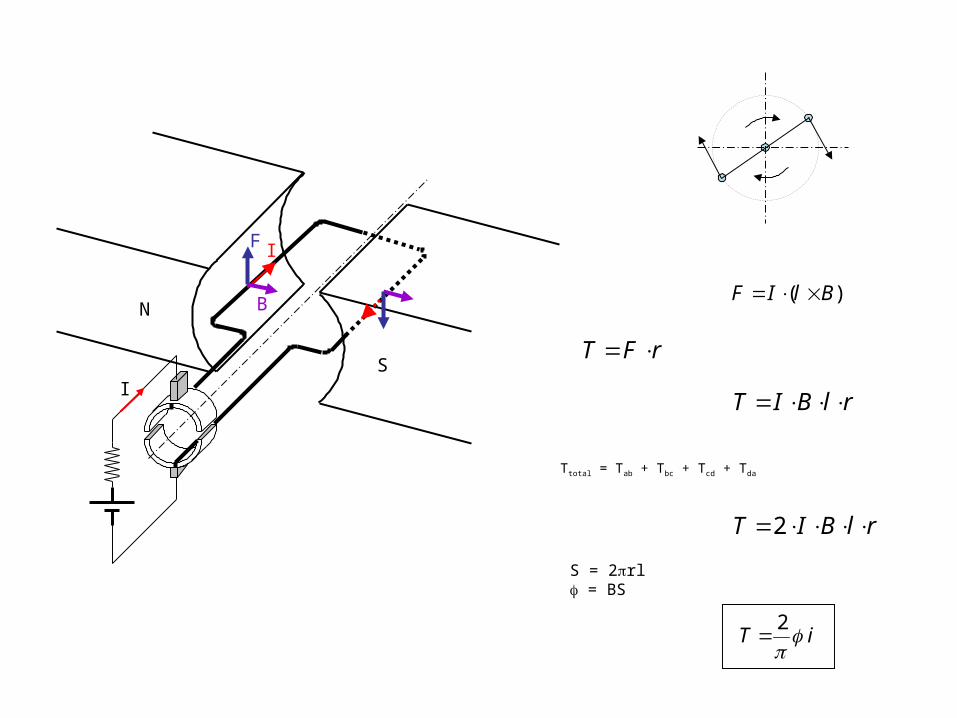
N
SI
F I
B
rFT
rlBIT
Ttotal = Tab + Tbc + Tcd + Tda
)( BlIF
rlBIT 2
S = 2rl = BS
iT 2
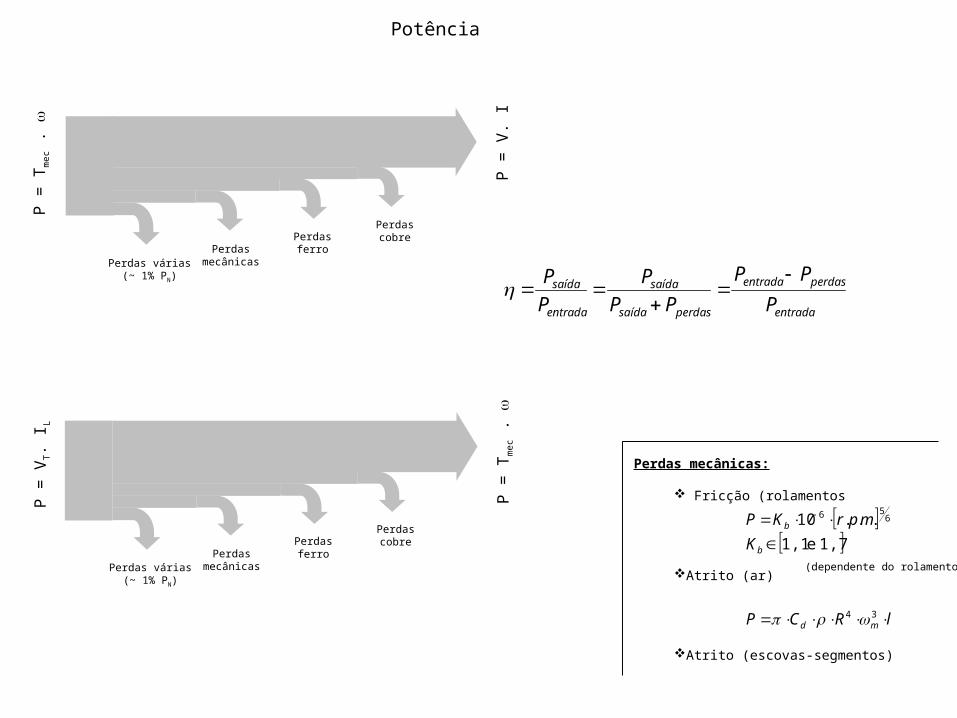
Perdas várias(~ 1% PN)
Perdasmecânicas
Perdasferro
Perdascobre
P =
Tm
ec .
P =
V. I
Perdas várias(~ 1% PN)
Perdasmecânicas
Perdasferro
Perdascobre
P =
Tm
ec .
P =
VT. I
L
entrada
perdasentrada
perdassaída
saída
entrada
saída
P
PP
PP
P
P
P
Perdas mecânicas:
Fricção (rolamentos
Atrito (ar)
Atrito (escovas-segmentos)
1,7 e 1,1
...10 656
b
b
K
mprKP
(dependente do rolamento)
lRCP md 34
Potência
• Excitação separada
• Shunt
• Série
• Composto
• Magneto permanente
Tipos de máquinas CC
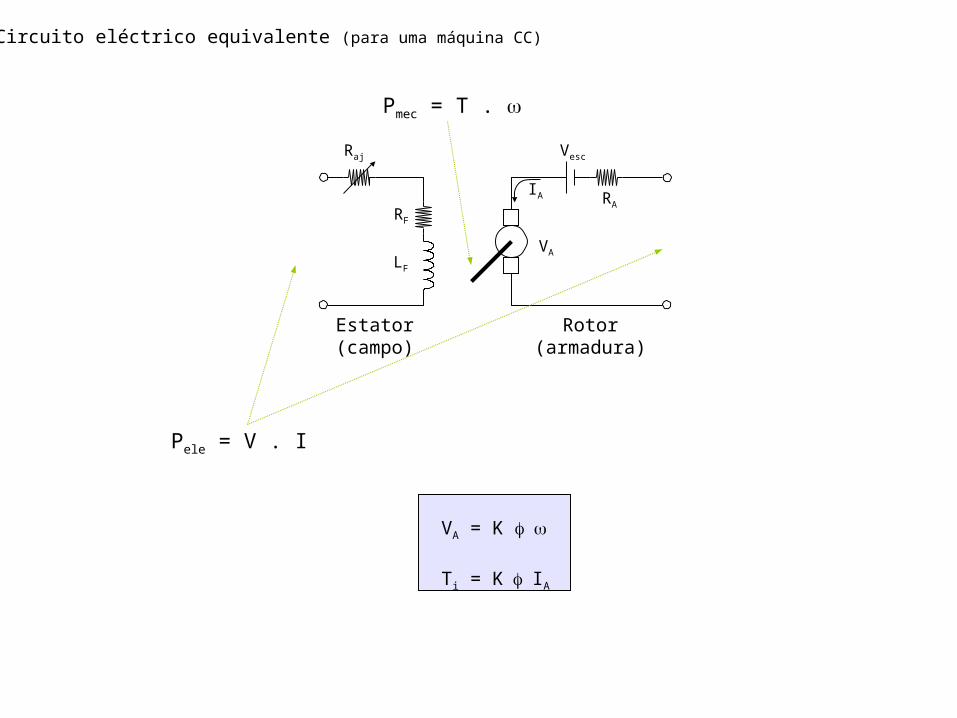
Estator(campo)
Rotor(armadura)
Pmec = T .
Pele = V . I
Circuito eléctrico equivalente (para uma máquina CC)
VA = K
Ti = KIA
Raj
RF
LF
VA
Vesc
RA
IA
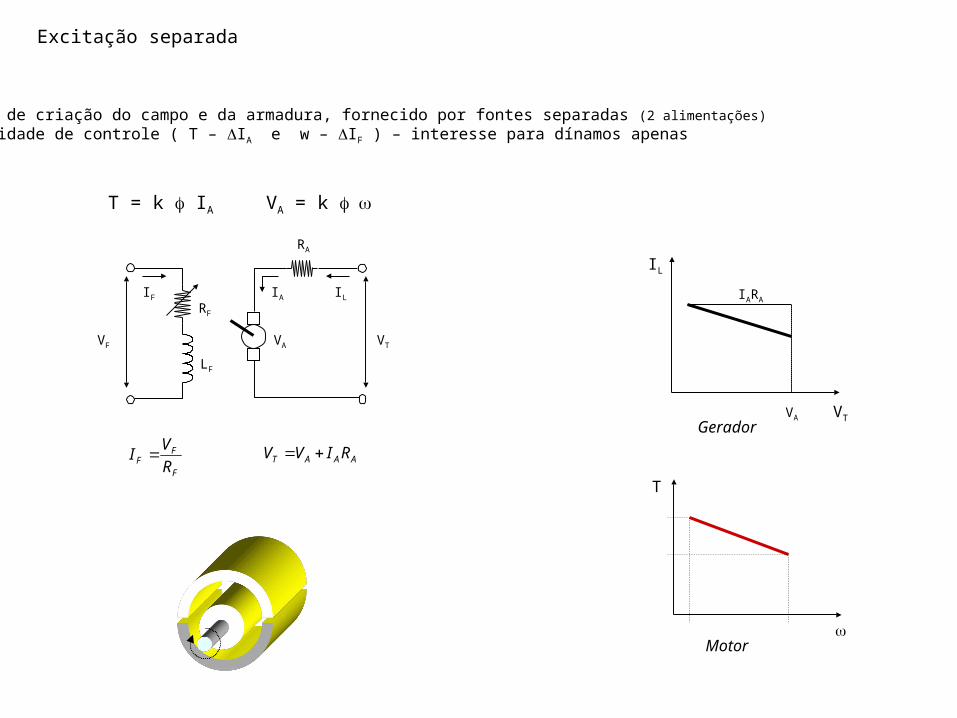
Excitação separada
circuito de criação do campo e da armadura, fornecido por fontes separadas (2 alimentações) flexibilidade de controle ( T – IA e w – IF ) – interesse para dínamos apenas
T = k IA VA = k
VF
IF
RF
LF
F
FF R
VI AAAT RIVV
VT
IL
VA
IARA
Gerador
VTVA
RA
IA IL
T
Motor
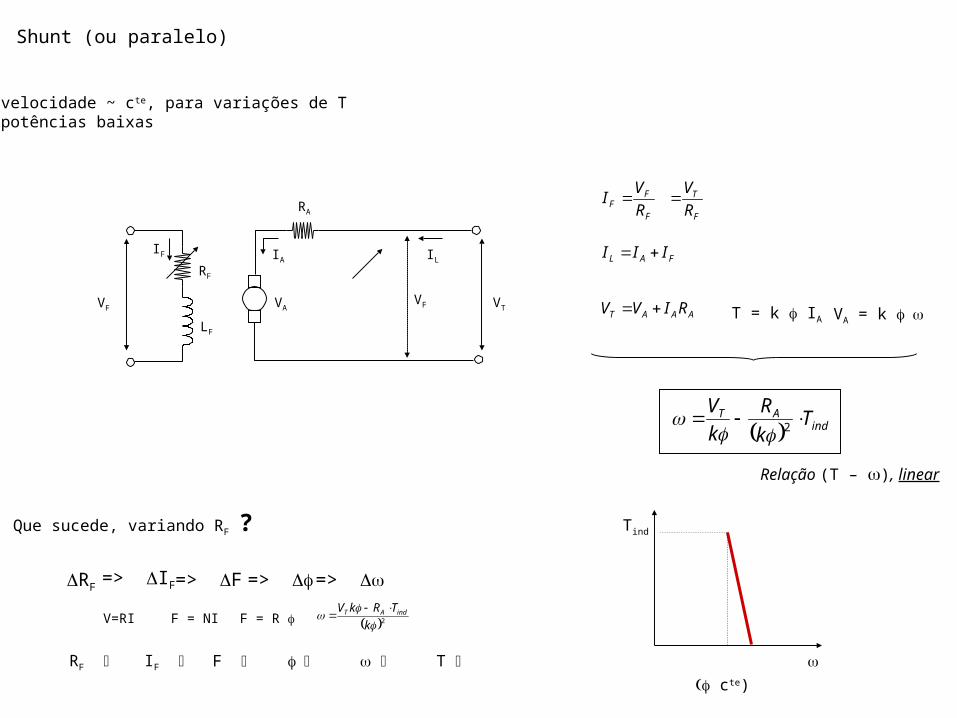
Shunt (ou paralelo)
velocidade ~ cte, para variações de T potências baixas
T = k IA VA = k VTVA
RA
IA IL
F
FF R
VI
FAL III
AAAT RIVV
indAT T
k
R
k
V 2
Tind
cte)
RF
F = NI F = R V=RI
RF F IF
2
k
TRkV indAT
=> IF => => => F
VF
IF
RF
LF
VF
T
F
V
R
Que sucede, variando RF ?
Relação (T – ), linear
T
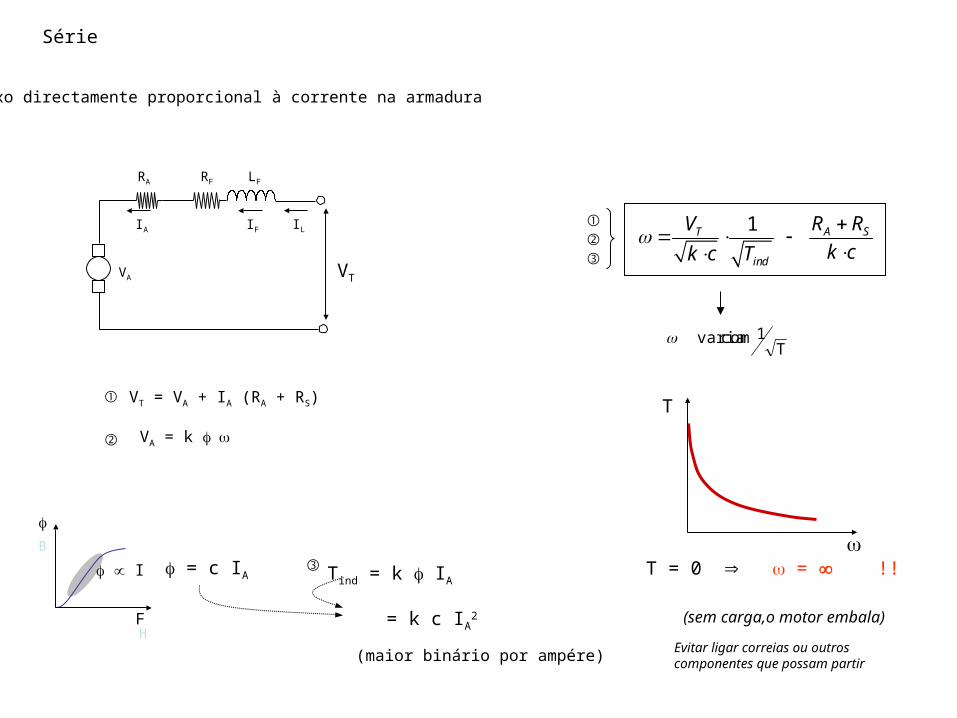
Série
Fluxo directamente proporcional à corrente na armadura
VTVA
RA
IA IF
RF LF
IL
VT = VA + IA (RA + RS)
VA = k
I
B
FH
= c IA Tind = k IA
(maior binário por ampére)
1 A ST
ind
R RV
k ck c T
T
T = 0 = !!
(sem carga,o motor embala)
Evitar ligar correias ou outroscomponentes que possam partir
T1 com varia
= k c IA2
VT
VF
Excitação independenteLigação em “Shunt” (paralelo)Ligação em série

Magneto permanente
Potências fraccionáriasSemelhante ao “shunt”Não permite variação de RF
Vantagens:não há perdas no cobre mais pequenos (enrolamentos de campo, desnecessários)
Desvantagens:menor binário (pois menor fluxo)risco de desmagnetização
VTVA
RA
IA IL