mecanismos fuerza.docx
37
UNIVERSIDAD DE ORIENTE NÚCLEO DE ANZOÁTEGUI ESCUELA DE INGENIERÍA Y CIENCIAS APLICADAS DEPARTAMENTO DE INGENIERIA MECANICA ANÁLISIS DE FUERZAS Revisado por: Realizado por: Ing. Manuel Martínez Alcalá, José Carlos CI: 20.762.597 Bello, Frank Miguel 1
-
Upload
frank-bello -
Category
Documents
-
view
236 -
download
8
Transcript of mecanismos fuerza.docx
UNIVERSIDAD DE ORIENTE
NÚCLEO DE ANZOÁTEGUI
ESCUELA DE INGENIERÍA Y CIENCIAS APLICADAS
DEPARTAMENTO DE INGENIERIA MECANICA
ANÁLISIS DE FUERZAS
Revisado por: Realizado por:
Ing. Manuel Martínez Alcalá, José Carlos
CI: 20.762.597
Bello, Frank Miguel
CI: 20.054.833
Barcelona, 16 de Diciembre del 2013
1
INDÍCE.
Análisis Estático de Máquinas Sin Fricción 3
Análisis Estático de Máquinas Con Fricción 7
Rendimiento de una Máquina Por Fricción 12
Efecto de la Inercia en un Cuerpo Rígido con Movimiento Plano 14
Análisis de Fuerzas de Inercia en Máquinas 16
Fuerza de Trepidación 17
Análisis Combinado de Fuerzas (Método de Superposición) 18
Ejercicios 19
2
ANÁLISIS ESTÁTICO DE MÁQUINAS SIN FRICCIÓN
Aunque los trabajos de cada máquina son diferentes, la manera en que
funcionan es similar matemáticamente. En cada máquina, una fuerza se aplica al
dispositivo en un punto, y trabajo mudanza de una carga, en otro punto. Aunque
algunas máquinas cambian solamente la dirección de la fuerza, tal como una
polea inmóvil, de la mayoría de las máquinas multiplique (o divídase) la magnitud
de la fuerza, por un factor que se pueda calcular de la geometría de la máquina.
Por ejemplo, la ventaja mecánica de a palanca es igual al cociente de sus brazos
de palanca.
Las máquinas simples no contienen una fuente de energía, así que no
pueden hacer más trabajo que reciben de la fuerza de la entrada. Cuando no
están presentes la fricción y la elasticidad, la salida del trabajo (que se hace en la
carga) es igual a la entrada del trabajo (de la fuerza aplicada).
Son dos las fuerzas importantes en cualquier máquina simple: el esfuerzo y
la carga. El esfuerzo (llamado a veces potencia) es la fuerza que se aplica a la
máquina y la carga (llamada a veces resistencia) es la fuerza que la máquina
supera al realizar trabajo útil. Así, por ejemplo, cuando se usa un cascanueces, el
esfuerzo lo proporciona nuestra mano al apretar las tenazas, y la carga
corresponde a la fuerza elástica de la nuez que se parte.
Debe aclararse que la magnitud por lo general del esfuerzo y el de la carga
no son iguales. De hecho la mayoría de las máquinas simples se utilizan en
situaciones donde la carga es mayor que el esfuerzo.
La capacidad de una máquina para mover una carga se describe por medio
de su ventaja mecánica (VM):
3
VM ≡ carga / esfuerzo
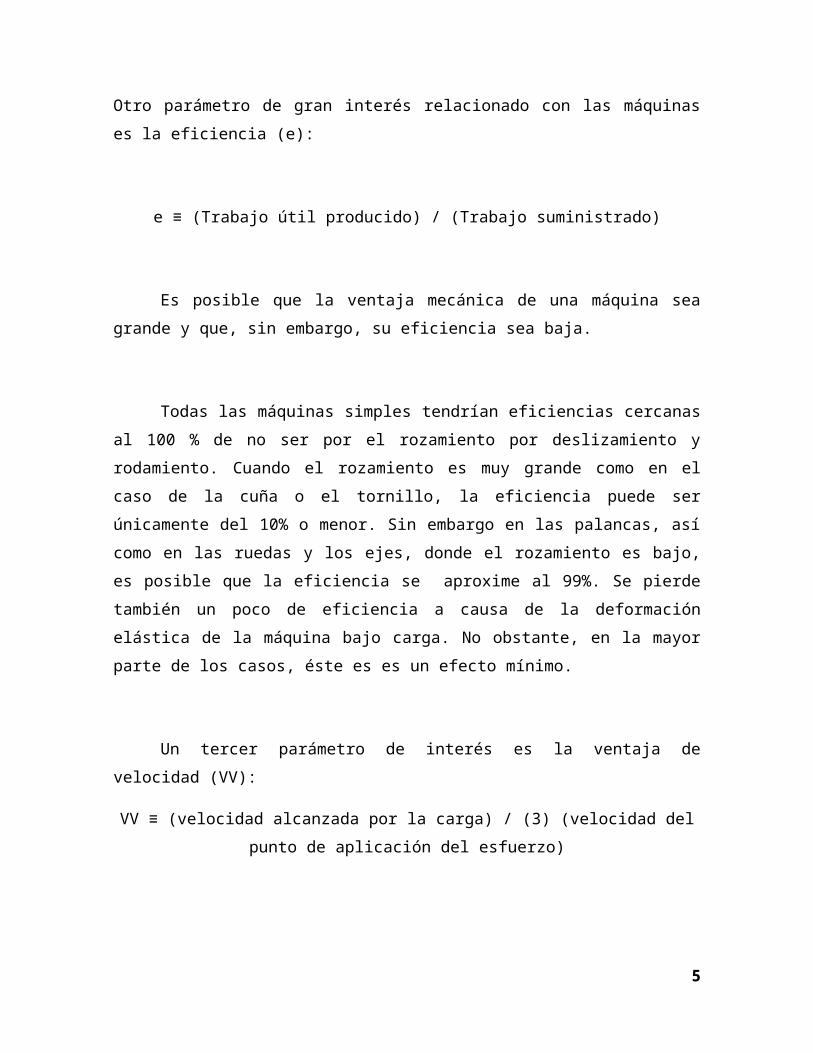
Otro parámetro de gran interés relacionado con las máquinas es la eficiencia (e):
e ≡ (Trabajo útil producido) / (Trabajo suministrado)
Es posible que la ventaja mecánica de una máquina sea grande y que, sin
embargo, su eficiencia sea baja.
Todas las máquinas simples tendrían eficiencias cercanas al 100 % de no
ser por el rozamiento por deslizamiento y rodamiento. Cuando el rozamiento es
muy grande como en el caso de la cuña o el tornillo, la eficiencia puede ser
únicamente del 10% o menor. Sin embargo en las palancas, así como en las
ruedas y los ejes, donde el rozamiento es bajo, es posible que la eficiencia se
aproxime al 99%. Se pierde también un poco de eficiencia a causa de la
deformación elástica de la máquina bajo carga. No obstante, en la mayor parte de
los casos, éste es es un efecto mínimo.
Un tercer parámetro de interés es la ventaja de velocidad (VV):
VV ≡ (velocidad alcanzada por la carga) / (3) (velocidad del punto de aplicación del
esfuerzo)
El valor de la VV coincide con el cociente entre los desplazamientos
realizados por la carga y el punto de aplicación del esfuerzo en un cierto tiempo t.
Debemos decir que una VM alta (mayor que la unidad) implica normalmente una
VV baja (menor que la unidad) y viceversa, ya que se puede demostrar que se
cumple que:
VM·VV = e (4)
4
Un ejemplo de una máquina simple es la palanca: una palanca consiste
simplemente en una barra rígida que gira en torno a algún punto a lo largo de la
misma.
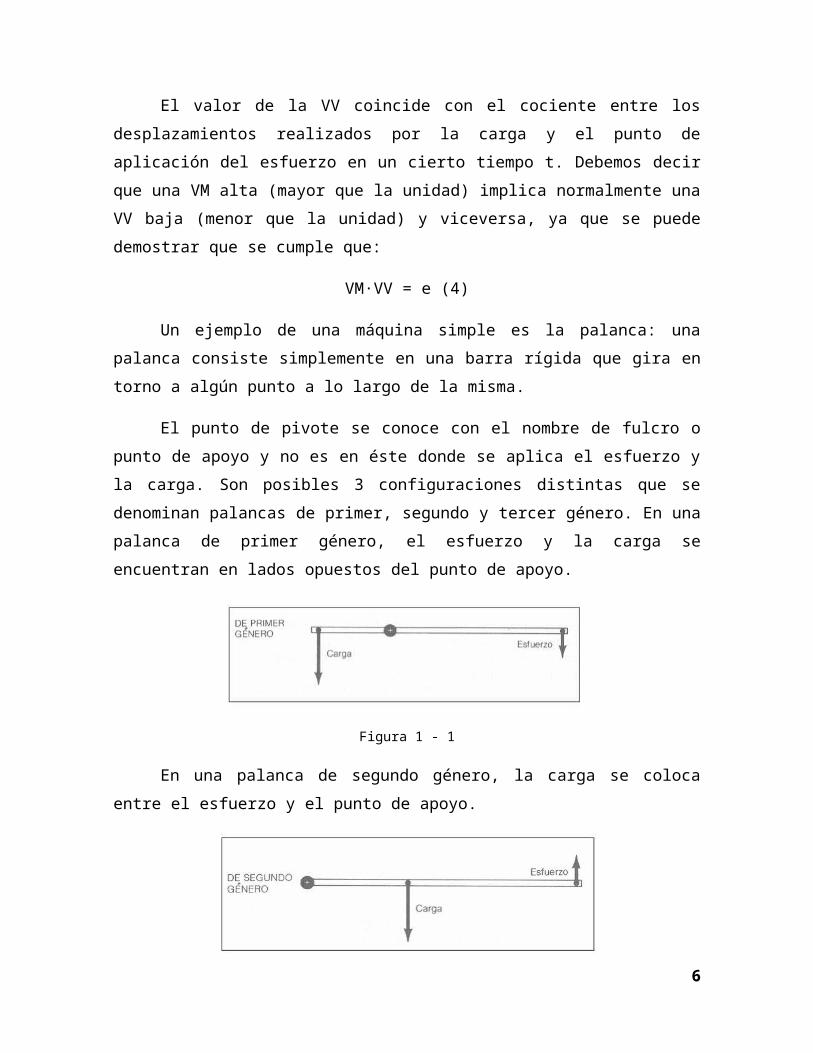
El punto de pivote se conoce con el nombre de fulcro o punto de apoyo y no
es en éste donde se aplica el esfuerzo y la carga. Son posibles 3 configuraciones
distintas que se denominan palancas de primer, segundo y tercer género. En una
palanca de primer género, el esfuerzo y la carga se encuentran en lados opuestos
del punto de apoyo.
Figura 1 - 1
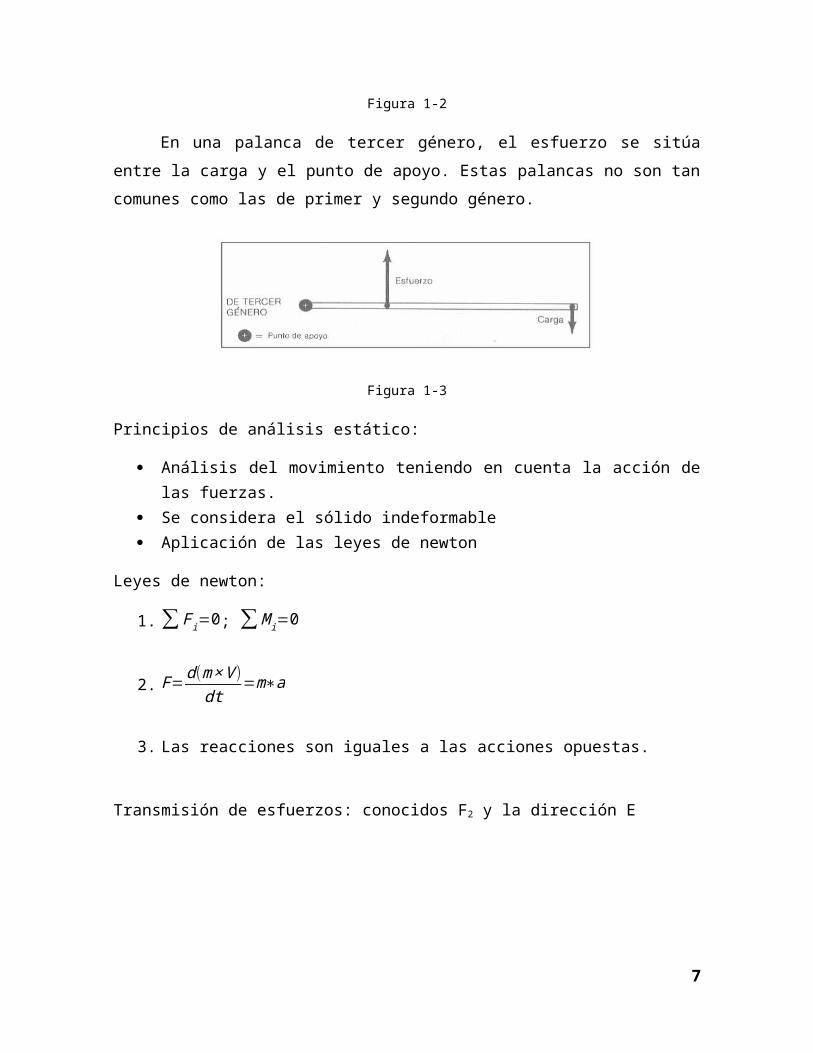
En una palanca de segundo género, la carga se coloca entre el esfuerzo y
el punto de apoyo.
Figura 1-2
En una palanca de tercer género, el esfuerzo se sitúa entre la carga y el
punto de apoyo. Estas palancas no son tan comunes como las de primer y
segundo género.
Figura 1-3
5
Principios de análisis estático:
Análisis del movimiento teniendo en cuenta la acción de las fuerzas. Se considera el sólido indeformable Aplicación de las leyes de newton
Leyes de newton:
1. ∑ F i=0; ∑M i=0
2. F=d (m×V )dt
=m∗a
3. Las reacciones son iguales a las acciones opuestas.
Transmisión de esfuerzos: conocidos F2 y la dirección E
Figura #1: transmisión de esfuerzos
F2: fuerza motriz que aporta energía R: fuerza transmitida en C, causada por F2
El aplicar F2 en P es igual a aplicar R en C. para equilibrar estáticamente el sistema, se debe hacer una fuerza E en C llamada equilibrante de manera que E=−R
El mismo comportamiento ocurre si se aplica un par M2:
6
Figura#2: transmisión de esfuerzos (momentos)
M2: par de entrada ME: par de equilibrio MR: Par transmitido
ME=−MR
El par M2 substituye a la fuerza cuya acción esta en el mismo sentido de F.
M 2=F A∗O 2 A
Reglas a cumplir:
1. Las fuerzas aplicadas a un mismo miembro del mecanismo pueden componerse o descomponerse siguiéndolas reglas estática grafica.
Figura#3: Desglosamiento de vectores
2. Una fuerza solo puede transmitirse a otro miembro o a un apoyo si pasa por el punto de contacto y es perpendicular a la superficie de contacto.
Figura#4: desplazamiento de fuerzas
En una articulación pueden transmitirse fuerzas de un miembro a otro en cualquier dirección con tal de que pase por el centro de la articulación.
ANÁLISIS ESTÁTICO DE MÁQUINAS CON FRICCIÓN.
En años recientes se ha despertado un enorme interés por el tema de la
fricción y el desgaste, y se han dedicado muchos artículos de investigación y libros
de texto a este tema. El propósito que nos ocupa aquí no es analizar con
7

profundidad la mecánica del tema en lo absoluto, sino presentar simplificaciones
matemáticas muy conocidas que se pueden utilizar para analizar el
comportamiento de las máquinas.
Los resultados de este tipo de análisis no serán teóricamente exactos, pero
corresponden muy aproximadamente al comportamiento experimental, de modo
que es factible tomar decisiones seguras respecto a un diseño y sus
características de operación.
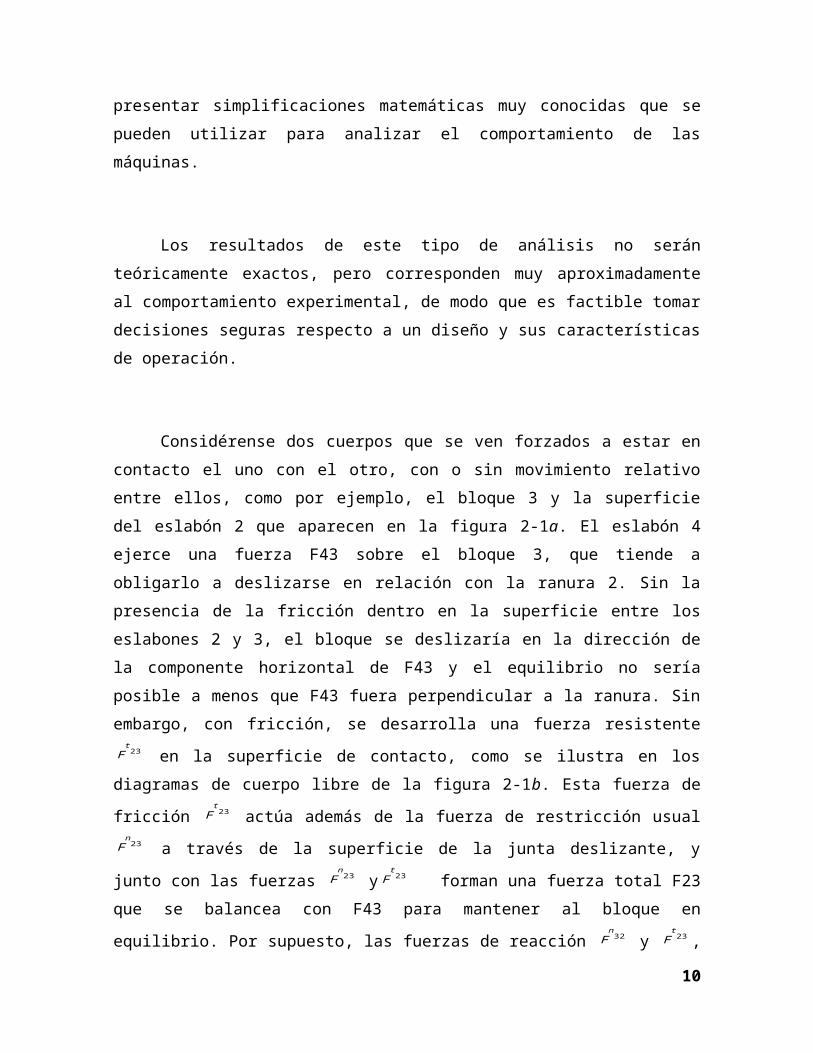
Considérense dos cuerpos que se ven forzados a estar en contacto el uno
con el otro, con o sin movimiento relativo entre ellos, como por ejemplo, el bloque
3 y la superficie del eslabón 2 que aparecen en la figura 2-1a. El eslabón 4 ejerce
una fuerza F43 sobre el bloque 3, que tiende a obligarlo a deslizarse en relación
con la ranura 2. Sin la presencia de la fricción dentro en la superficie entre los
eslabones 2 y 3, el bloque se deslizaría en la dirección de la componente
horizontal de F43 y el equilibrio no sería posible a menos que F43 fuera
perpendicular a la ranura. Sin embargo, con fricción, se desarrolla una fuerza
resistente Ft23 en la superficie de contacto, como se ilustra en los diagramas de
cuerpo libre de la figura 2-1b. Esta fuerza de fricción Ft23 actúa además de la
fuerza de restricción usual Fn23 a través de la superficie de la junta deslizante, y
junto con las fuerzas Fn23 yF
t23 forman una fuerza total F23 que se balancea
con F43 para mantener al bloque en equilibrio. Por supuesto, las fuerzas de
reacción Fn32 y F
t23 , están actuando también simultáneamente sobre el eslabón
2, como se muestra en el otro diagrama de cuerpo libre de la figura 12-16b. La
fuerza Ft23 y su reacción F
n32 se conocen como fuerzas de fricción.
8
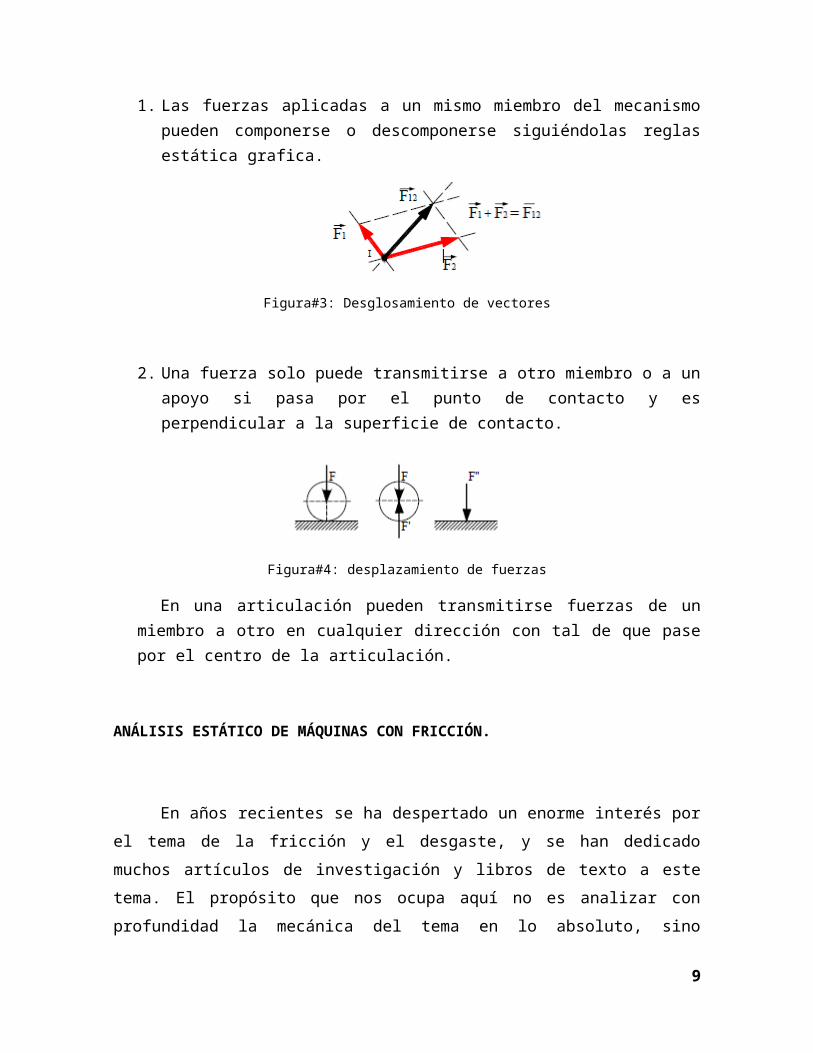
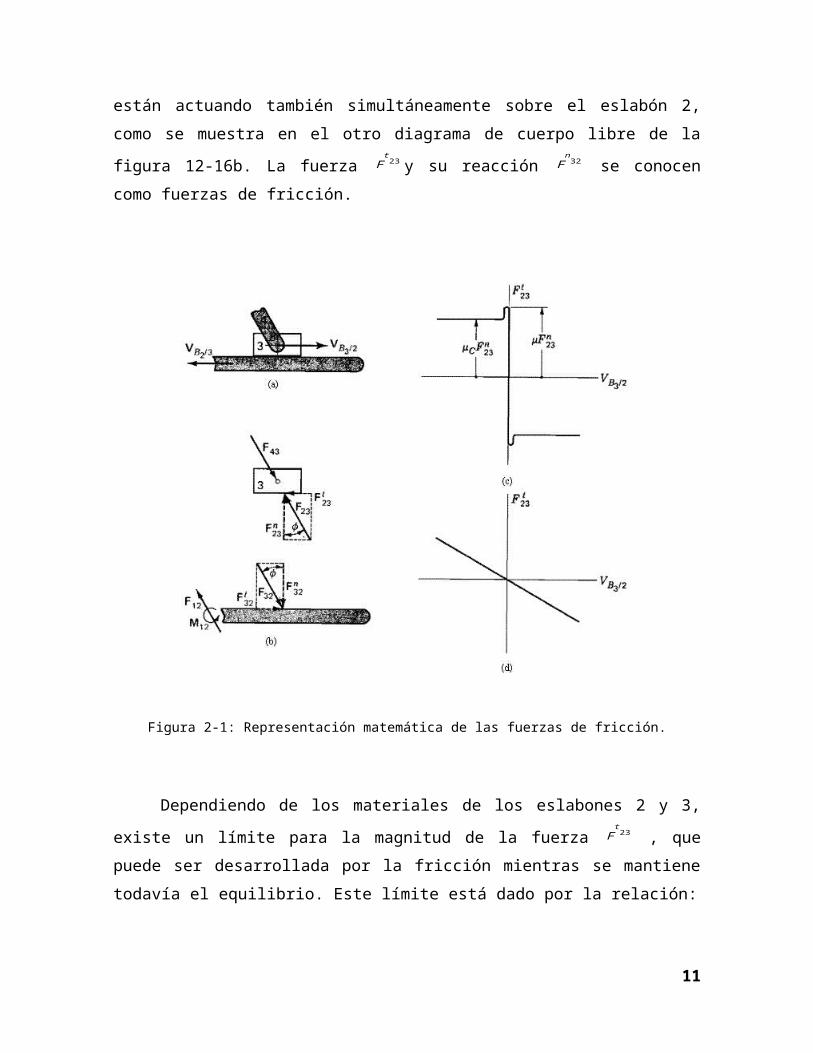
Figura 2-1: Representación matemática de las fuerzas de fricción.
Dependiendo de los materiales de los eslabones 2 y 3, existe un límite para
la magnitud de la fuerza Ft23 , que puede ser desarrollada por la fricción mientras
se mantiene todavía el equilibrio. Este límite está dado por la relación:
(2-2)
en donde μ que se define como el coeficiente de fricción estática, es una
propiedad característica de los materiales en contacto . Se han determinado
experimentalmente valores del coeficiente μ para muchos materiales, y estos se
pueden encontrar en la mayor parte de los manuales de ingeniería.
9
Si la fuerza F43 se inclina demasiado, de tal manera que su componente
horizontal y, por ende, Ft23 son demasiado grandes para satisfacer la ecuación (2-
2), el equilibrio no es posible y el bloque se deslizará en relación con el eslabón 2,
con una velocidad aparente V B3/2. Cuando se produce el deslizamiento, la fuerza
de fricción toma el valor:
(2-3)
en donde μc es el coeficiente de fricción de deslizamiento. La fricción de
deslizamiento se denomina muy a menudo fricción de Coulomb, y ese término se
utilizará aquí con frecuencia. También se puede hallar experimentalmente el
coeficiente μc y es un poco menor que JL para la mayor parte de los materiales.
En la figura 2-1c se presenta una gráfica de la fuerza de fricción Ft23 contra
la velocidad aparente V B3/2 Aquí se puede ver que cuando la velocidad de
deslizamiento es cero, la fuerza de fricción Ft23puede tener cualquier magnitud
entreμFn23−μF
n23
Cuando la velocidad no es cero, la fuerza de fricción Ft23
desciende ligeramente en magnitud hasta el valor μc Fn23
, Y tiene una dirección
que se opone al movimiento de deslizamiento, V B3/2
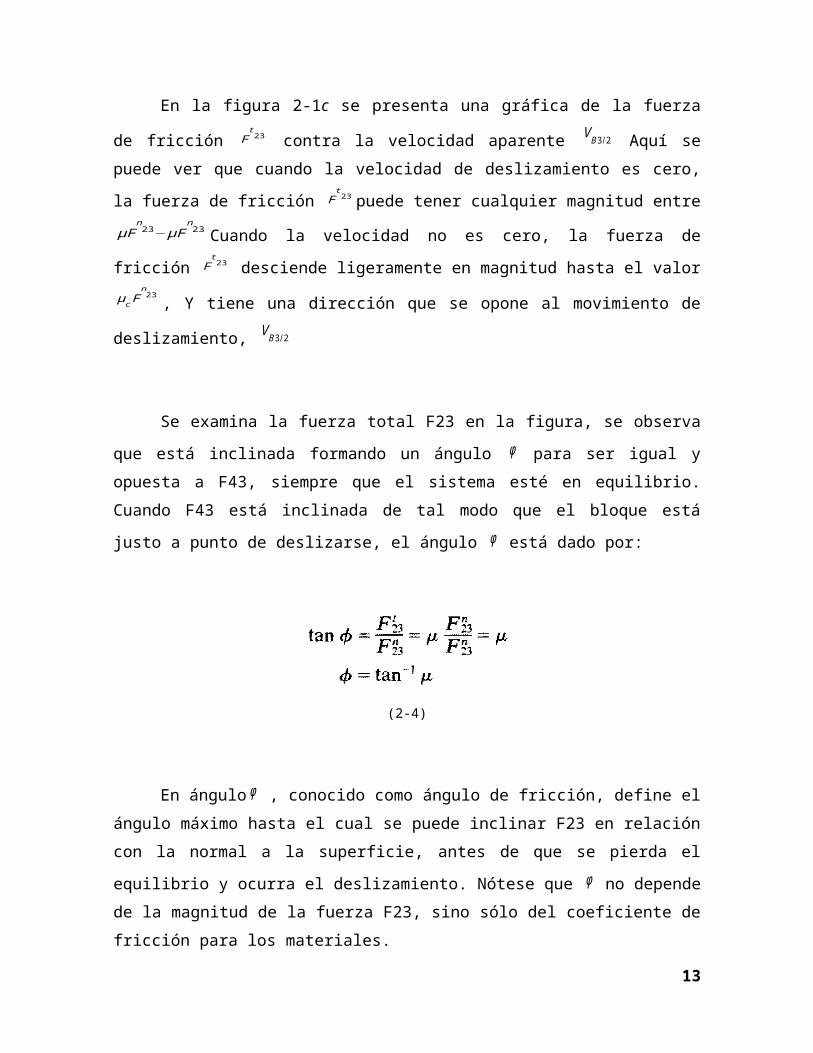
Se examina la fuerza total F23 en la figura, se observa que está inclinada
formando un ángulo φ para ser igual y opuesta a F43, siempre que el sistema esté
en equilibrio. Cuando F43 está inclinada de tal modo que el bloque está justo a
punto de deslizarse, el ángulo φ está dado por:
10
(2-4)
En ánguloφ , conocido como ángulo de fricción, define el ángulo máximo
hasta el cual se puede inclinar F23 en relación con la normal a la superficie, antes
de que se pierda el equilibrio y ocurra el deslizamiento. Nótese que φ no depende
de la magnitud de la fuerza F23, sino sólo del coeficiente de fricción para los
materiales.
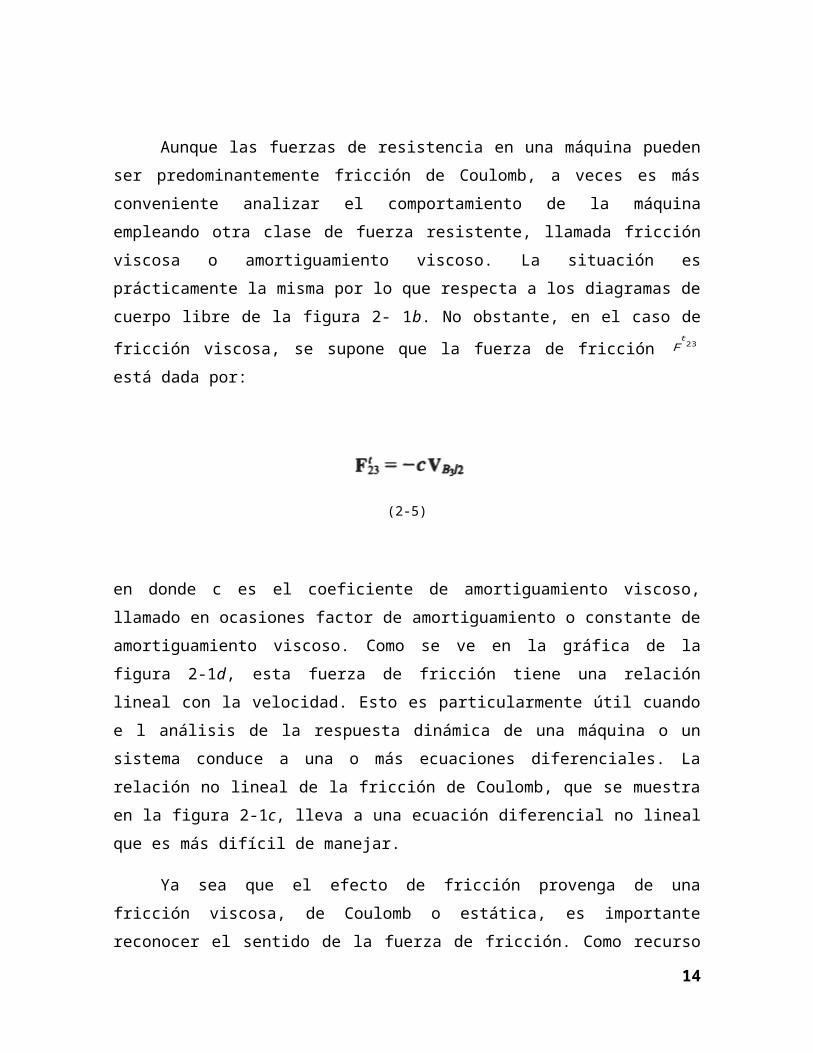
Aunque las fuerzas de resistencia en una máquina pueden ser
predominantemente fricción de Coulomb, a veces es más conveniente analizar el
comportamiento de la máquina empleando otra clase de fuerza resistente, llamada
fricción viscosa o amortiguamiento viscoso. La situación es prácticamente la
misma por lo que respecta a los diagramas de cuerpo libre de la figura 2- 1b. No
obstante, en el caso de fricción viscosa, se supone que la fuerza de fricción Ft23
está dada por:
(2-5)
en donde c es el coeficiente de amortiguamiento viscoso, llamado en ocasiones
factor de amortiguamiento o constante de amortiguamiento viscoso. Como se ve
en la gráfica de la figura 2-1d, esta fuerza de fricción tiene una relación lineal con
la velocidad. Esto es particularmente útil cuando e l análisis de la respuesta
dinámica de una máquina o un sistema conduce a una o más ecuaciones
diferenciales. La relación no lineal de la fricción de Coulomb, que se muestra en la
figura 2-1c, lleva a una ecuación diferencial no lineal que es más difícil de manejar.
11

Ya sea que el efecto de fricción provenga de una fricción viscosa, de
Coulomb o estática, es importante reconocer el sentido de la fuerza de fricción.
Como recurso nemotécnico, la regla se expresa a menudo como sigue: " la fuerza
de fricción se opone al movimiento", como lo muestra el diagrama de cuerpo libre
del eslabón 3, figura 2-1b, en donde el sentido de Ft23 es opuesto al de V B3/2.
Esta regla práctica no es errónea si se aplica con cuidado; pero puede ser
peligrosa. Se observará en la figura 2-1a que hay dos movimientos que se podrían
considerar, V B3/2 y V B2/3; se tienen también dos fuerzas de fricción F23 y Fn32 . Si
se examina con cuidado la figura 2-1b, se verá que Ft23 se opone al sentido de
V B3/2, mientras que Ft32 se opone al sentido de V B3/2. En sistemas de máquinas,
en donde, con frecuencia, los dos lados de una junta deslizante están en
movimiento, es importante comprender cuál fuerza de fricción se opone a cuál
movimiento.
RENDIMIENTO Y FRICCION EN MÁQUINAS.
El rendimiento mecánico es una relación de trabajos o energías (o también
potencias) Se define como el trabajo o energía aprovechada dividida por trabajo o
energía suministrada.
La energía aprovechada es igual a la energía suministrada menos la
energía perdida por rozamiento
Lógicamente es siempre menor que 1 y puede expresarse en porcentaje.
12
R = Ea / Es
R = (Es - Er) / Es
Potencia es trabajo sobre tiempo (Kj/seg=Kw). Como estos trabajos se
realizan simultáneamente, el rendimiento también puede ser expresado en función
de la potencia mecánica.
La fricción es una fuerza de contacto que actúa para oponerse al
movimiento deslizante entre superficies. Actúa paralela a la superficie y opuesta
al sentido del deslizamiento. Se denomina como Ff. La fuerza de fricción también
se le conoce como fuerza de rozamiento.
La idea de rendimiento va unida a la de trabajo, cuando una máquina se
usa para transformar, energía mecánica en energía eléctrica o, energía térmica en
energía mecánica, su rendimiento puede definirse como la razón entre el trabajo
que sale (trabajo útil) y el que entra (trabajo producido), o como la razón entre la
potencia que sale y la que entra, o como la razón entre la energía que sale y entra.
El rendimiento mecánico en una máquina ideal es 1 (u= 0) porque no existe
rozamiento y el trabajo útil es igual al trabajo producido (Wútil = Wprod), potencia
de salida igual a la potencia de entrada.
El rendimiento mecánico en una “máquina real” es siempre menor que 1,
debido a las pérdidas de energía por el rozamiento interno que surge durante su
funcionamiento de la máquina. Generalmente se multiplica por 100, para que el
rendimiento se exprese en porcentaje.
El rendimiento total de un número de máquinas colocadas en serie es igual
al producto de sus rendimientos individuales.
13
R = Wútil / Wprod R = Pútil / Pprod R = Eútil / Eprod
Se supone que las máquina transmiten toda la fuerza que se les comunica;
pero no es está la realidad, pues parte de la fuerza se pierde en la práctica,
gastándose en rozamientos, choques, trepidaciones, etc. La parte absorbida por
esta resistencia se llama “trabajo pasivo”, y la que resulta efectiva para el fin
intentado por la máquina, se llama trabajo “útil”.
El cociente del trabajo útil por el trabajo motor (el de la potencia), constituye
el rendimiento de la máquina.
EFECTO DE LA INERCIA EN UN CUERPO RIGIDO CON MOVIMIENTO PLANO
La cinética de los cuerpos rígidos trata de las relaciones existentes entre las
fuerzas que sobre ellos ejercen agentes exteriores y los correspondientes
movimientos de traslación y rotación de dichos cuerpos. Un cuerpo rígido que
ejecute un movimiento plano puede asimilarse a una placa plana delgada cuyo
movimiento este confinado al plano de la placa, el cual es además el plano del
movimiento. Este plano contiene el centro de masa, y todas las fuerzas que actúan
sobre el cuerpo se proyectan sobre el mismo.
En la cinética de los cuerpos rígidos animados de movimiento angular es
necesario introducir una propiedad característica del cuerpo que responde de la
distribución radial de la masa respecto a un eje de rotación particular
perpendicular al plano del movimiento. Esta característica se conoce como
movimiento de inercia del cuerpo y es imprescindible saber cómo se calcula para
resolver problemas de cuerpos en rotación.
Aplicando las ecuaciones que rigen el movimiento de un sistema general a
un cuerpo rígido considerado en el espacio tridimensional tenemos:
14
Dicha ecuación nos dice que la resultante ΣF de las
fuerzas exteriores actuantes sobre un cuerpo es igual a la masa m por la
aceleración aG de su centro de masa G. La otra ecuación hace referencia al
momento resultante y es:
Aplicaremos ahora las relaciones anteriores al caso de movimiento plano.
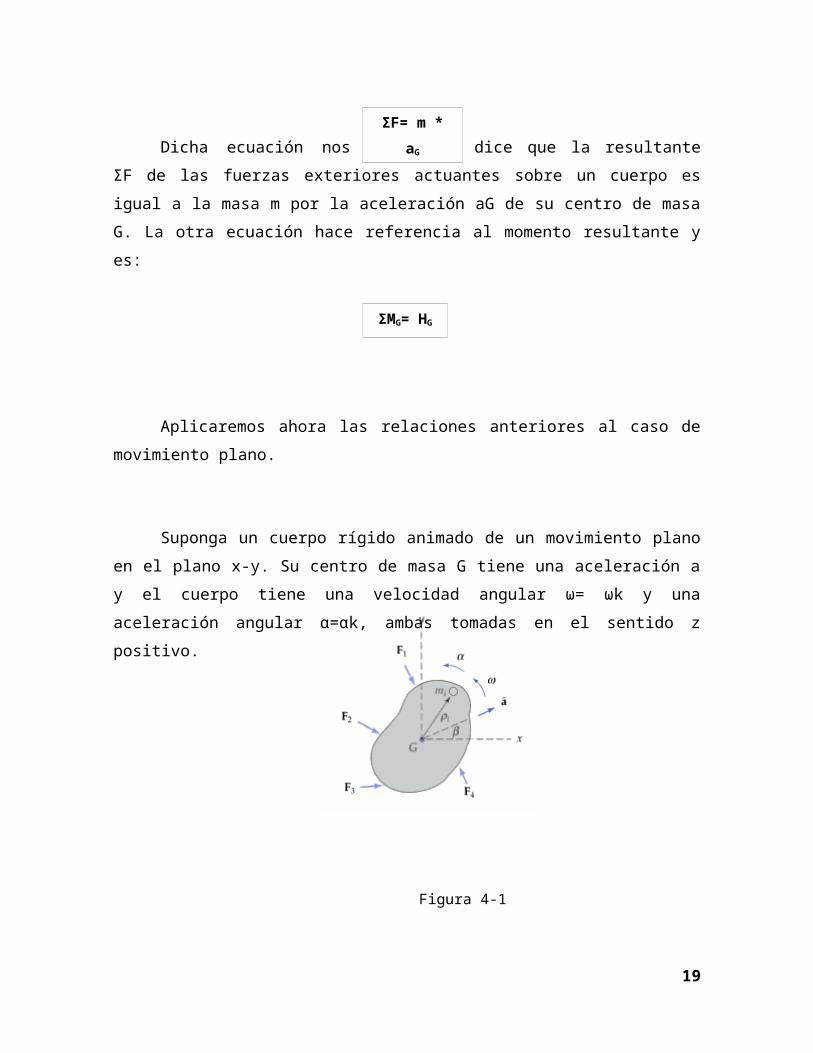
Suponga un cuerpo rígido animado de un movimiento plano en el plano x-y.
Su centro de masa G tiene una aceleración a y el cuerpo tiene una velocidad
angular ω= ωk y una aceleración angular α=αk, ambas tomadas en el sentido z
positivo.
Figura 4-1
El momento cinético respecto al centro de masa de un sistema general
vimos que es HG = Σρi x mi ρ’i. En nuestro cuerpo rígido la velocidad de mi
relativa a G es ρ’i = ω x ρi , cuyo modulo es ρi ω y yace en el plano del movimiento
y es perpendicular a ρi. El producto ρi x ρi’ es, pues, un vector normal al plano x-y
con el sentido de ω y de módulo ρi2 ω. De este modo el modulo de HG se hace
HG =Σρi2 mi ω = ω Σρi2 mi. Este sumatorio también podría escribirse ,
15
ΣF= m * aG
ΣMG= HG
que es por definición el momento de inercia másico I del cuerpo respecto al eje z
que pasa por G.
Ahora podemos escribir:
Donde I es una propiedad constante del cuerpo que constituye una medida
de su inercia a la rotación o resistencia a los cambios de velocidad de rotación,
consecuencia del modo en que su masa está distribuida radialmente en torno al
eje z que pasa por G.
ANÁLISIS DE FUERZAS DE INERCIAS EN MÁQUINAS
Del estudio de la mecánica se sabe que las siguientes ecuaciones de movimiento se aplican a un cuerpo rígido en movimiento plano.
∑ F = M Ag ∑ T = I α
En donde ∑F es la suma vectorial o la resultante R de un sistema de
fuerzas que actúan en el cuerpo en el plano de movimiento; M es la masa del
cuerpo; y Ag es la aceleración del centro de masa del cuerpo. ∑T es la suma de
los momentos de las fuerzas y pares alrededor de un eje que pasa por el centro
de masa normal al plano de movimiento; I es el momento de inercia del cuerpo
alrededor del mismo eje pasando por el centro de masa; y α es la aceleración
angular del cuerpo en el plano de movimiento.
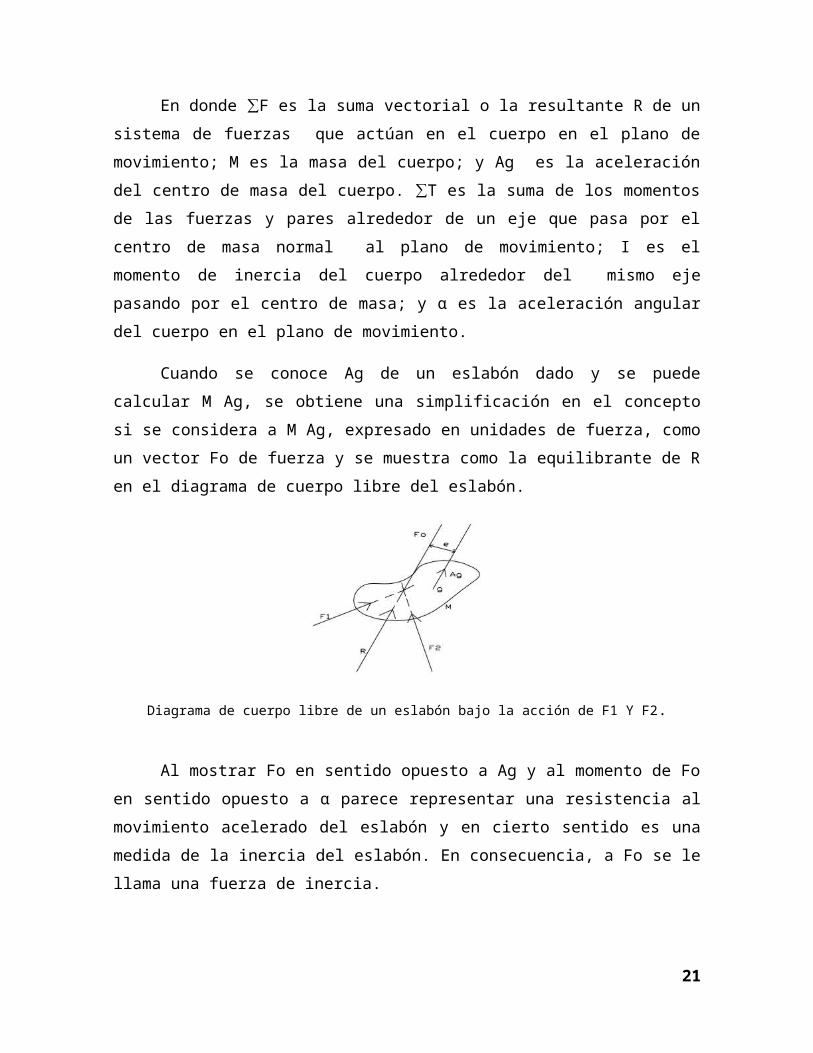
Cuando se conoce Ag de un eslabón dado y se puede calcular M Ag, se
obtiene una simplificación en el concepto si se considera a M Ag, expresado en
unidades de fuerza, como un vector Fo de fuerza y se muestra como la
equilibrante de R en el diagrama de cuerpo libre del eslabón.
16
HG=I x ω
Diagrama de cuerpo libre de un eslabón bajo la acción de F1 Y F2.
Al mostrar Fo en sentido opuesto a Ag y al momento de Fo en sentido
opuesto a α parece representar una resistencia al movimiento acelerado del
eslabón y en cierto sentido es una medida de la inercia del eslabón. En
consecuencia, a Fo se le llama una fuerza de inercia.
FUERZA DE TREPIDACIÓN
De lo visto hasta ahora se desprende que todos los miembros de un
mecanismos están sometidos a esfuerzos variables en el tiempo (en forma cíclica,
si el mecanismo es cíclico), debido tanto a la variación de los esfuerzos exteriores
aplicados como a la influencia de la posición del mecanismos y los efectos de las
fuerzas de inercia.
En particular, es importante considerar las repercusiones de estas
variaciones sobre el miembro fijo del mecanismo, o sea, sobre el bastidor, dado
que las acciones sobre éste repercuten directamente sobre todos los demás
miembros del mecanismo y sobre la base que lo soporta.
En términos generales, las acciones sobre el bastidor, como resultado del
os esfuerzos totales, son un par de vuelco y una fuerza resultante. Al ser ambas
variables en el tiempo dan lugar a lo que se conoce como par y fuerza de
trepidación.
17
Estos pares y/o fuerzas de trepidación se trasmiten al resto del mecanismos
y a la bancada, si existe, produciendo vibraciones del suelo en las proximidades,
ruidos, rotura de piezas, pérdidas de potencia, etc.
En general son más perjudiciales las consecuencias de la fuerza de
trepidación que la del par de trepidación, aunque esto depende fundamentalmente
del tipo de mecanismo.
Por ejemplo, en motores de gran cilindrada y poca velocidad, predominan
los efectos del par de trepidación (par de vuelco) sobre los de la fuerza de
trepidación (resultante de las fuerzas de inercia), y lo contrario ocurre en motores
de poca cilindrada y gran velocidad.
En pequeños motores que mueven, por ejemplo, alternadores de poca
potencia, en los que el bastidor sirve de soporte y apoyo del conjunto,
descansando libremente sobre el suelo, el efecto de estas fuerzas y momentos es
manifiesto; el grupo se pone materialmente a saltar y trasladarse sobre el suelo.
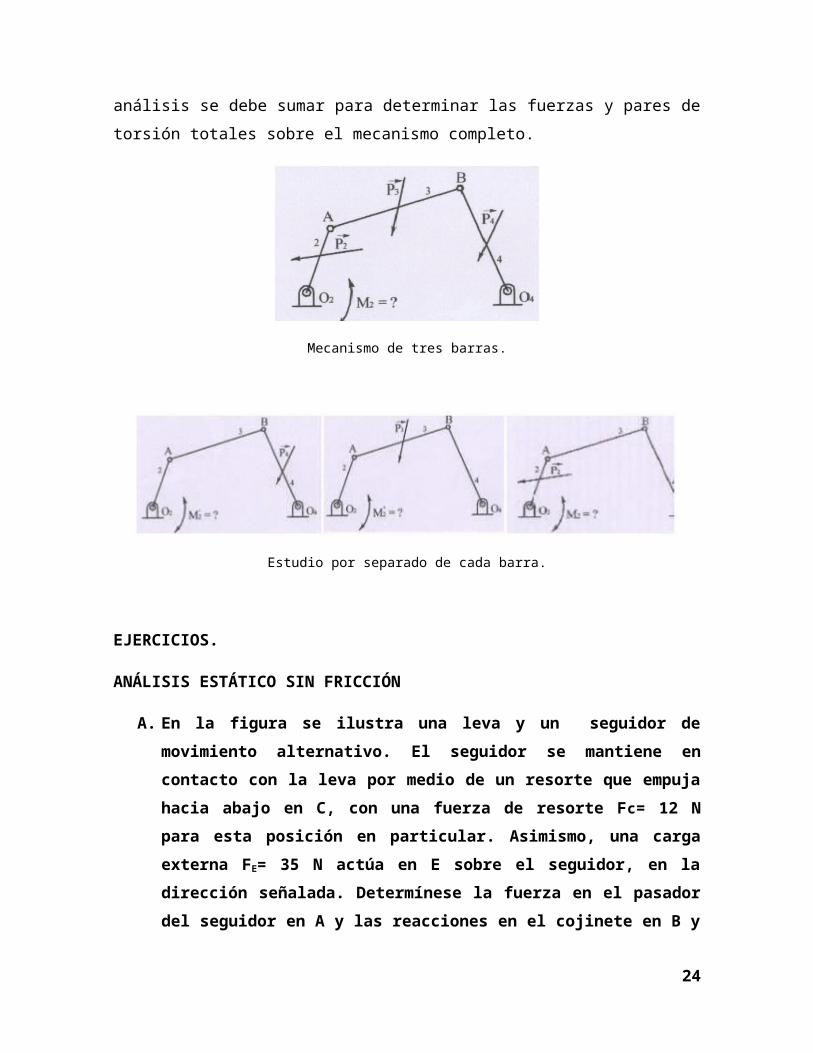
ANÁLISIS COMBINADO DE FUERZAS (METODO DE SUPERPOSICIÓN)
El principio de superposición establece que “el efecto resultante de varias
fuerzas sobre un cuerpo es equivalente a la suma de los efectos parciales, sobre
el mismo, de cada una de ellas”. Por tanto, para resolver un mecanismo de “n”
eslabones articulados se debe realizar un análisis separado de cada uno de los “n”
eslabones, considerando las fuerzas de inercia y exteriores que actúan sobre cada
uno de ellos, así como los pares de torsión. Para obtener el resultado del análisis
se debe sumar para determinar las fuerzas y pares de torsión totales sobre el
mecanismo completo.
18
Mecanismo de tres barras.
Estudio por separado de cada barra.
EJERCICIOS.
ANÁLISIS ESTÁTICO SIN FRICCIÓN
A. En la figura se ilustra una leva y un seguidor de movimiento
alternativo. El seguidor se mantiene en contacto con la leva por medio
de un resorte que empuja hacia abajo en C, con una fuerza de resorte
Fc= 12 N para esta posición en particular. Asimismo, una carga
externa FE= 35 N actúa en E sobre el seguidor, en la dirección
señalada. Determínese la fuerza en el pasador del seguidor en A y las
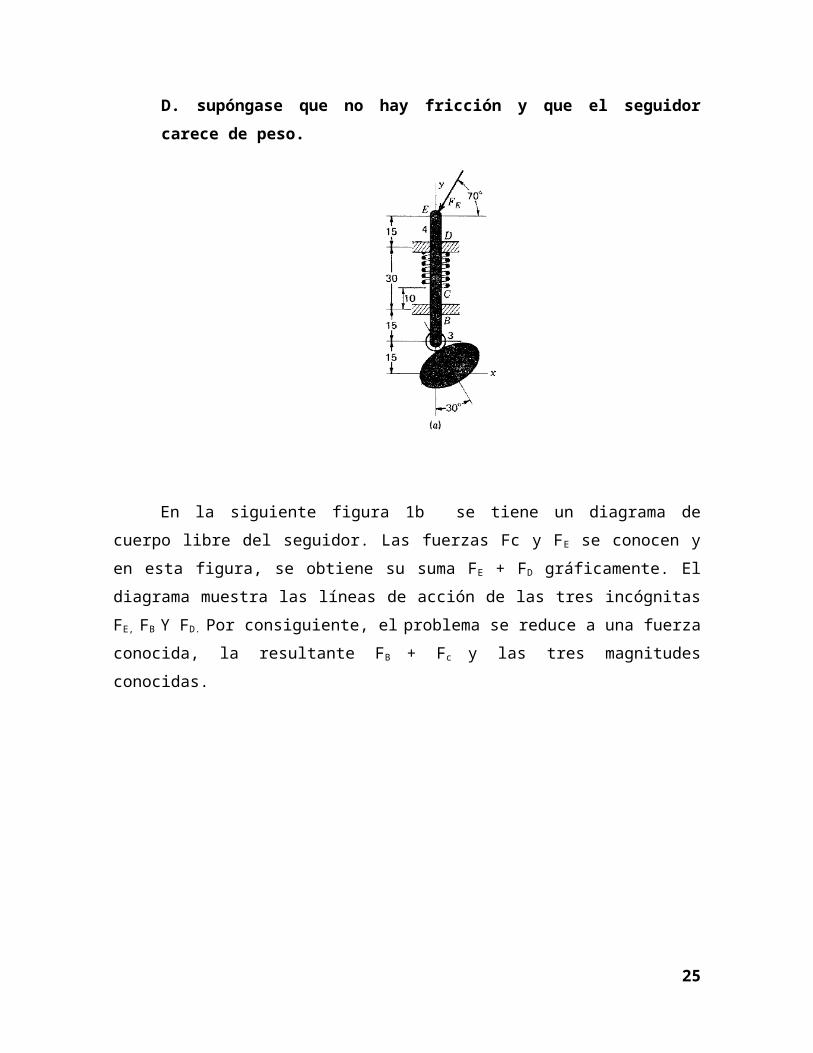
reacciones en el cojinete en B y D. supóngase que no hay fricción y
que el seguidor carece de peso.
19
En la siguiente figura 1b se tiene un diagrama de cuerpo libre del seguidor.
Las fuerzas Fc y FE se conocen y en esta figura, se obtiene su suma FE + FD
gráficamente. El diagrama muestra las líneas de acción de las tres incógnitas FE,
FB Y FD. Por consiguiente, el problema se reduce a una fuerza conocida, la
resultante FB + Fc y las tres magnitudes conocidas.
1b
En la figura 1c se muestra la resultante FE + Fc con su punto de aplicación
en E. Esto es permisible deslizando FC a lo largo de su línea de acción. Si se
conociera FD, se podría sumar a FE + Fc para producir la resultante FE + Fc + FD, que
luego actuaria pasando por el punto p.
20
Considérese ahora la ecuación de momentos. Si se escribe ΣMq=0, es
evidente que solo se puede satisfacer la ecuación si la resultante FE+ Fc + FD tiene
como su línea de acción pq. Asi que, esta es la base para la solución grafica.
Como se ilustra en el polígono de fuerzas de la siguiente figura, la resultante FE+
Fc + FD que actúa a lo largo de la línea pq se utiliza primero para encontrar la
fuerza FD. El polígono se completa encontrando FA y FB, puesto que se conocen sus
líneas de acción.
Una solución analítica para este problema da FA= 51.8 N, FB= 32.8 N, Y FD=
5.05 N.
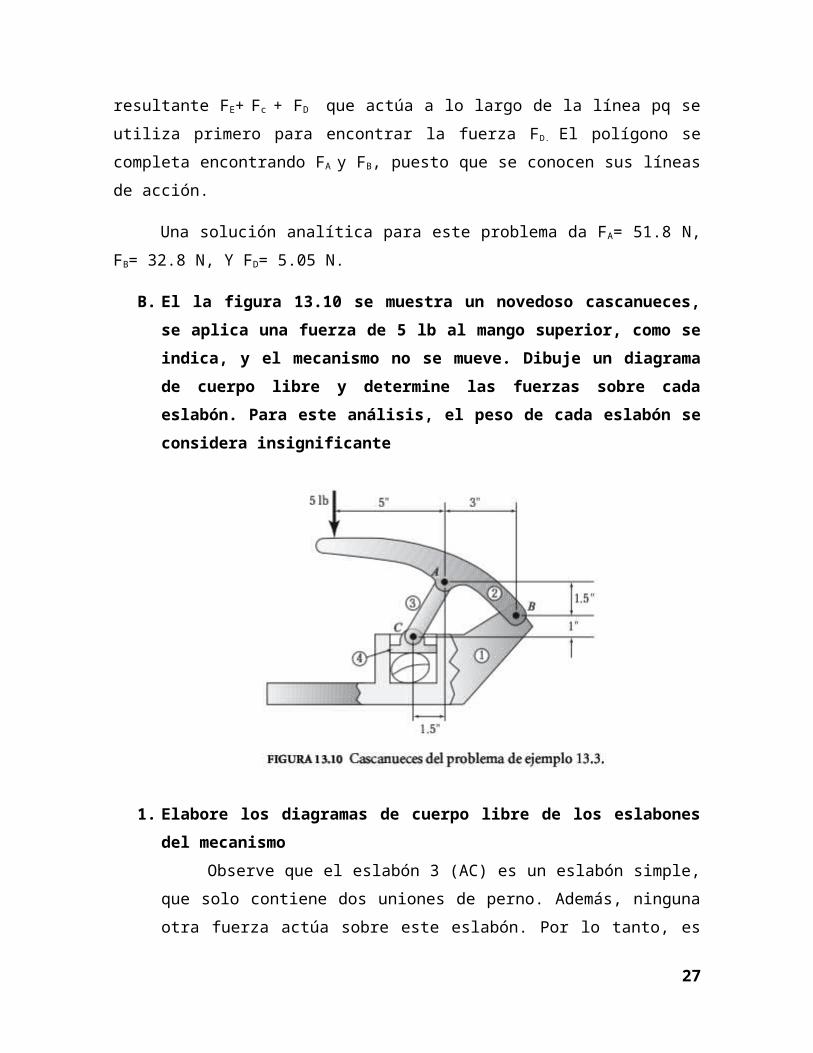
B. El la figura 13.10 se muestra un novedoso cascanueces, se aplica una
fuerza de 5 lb al mango superior, como se indica, y el mecanismo no
se mueve. Dibuje un diagrama de cuerpo libre y determine las fuerzas
sobre cada eslabón. Para este análisis, el peso de cada eslabón se
considera insignificante
21
1. Elabore los diagramas de cuerpo libre de los eslabones del
mecanismo
Observe que el eslabón 3 (AC) es un eslabón simple, que solo
contiene dos uniones de perno. Además, ninguna otra fuerza actúa sobre
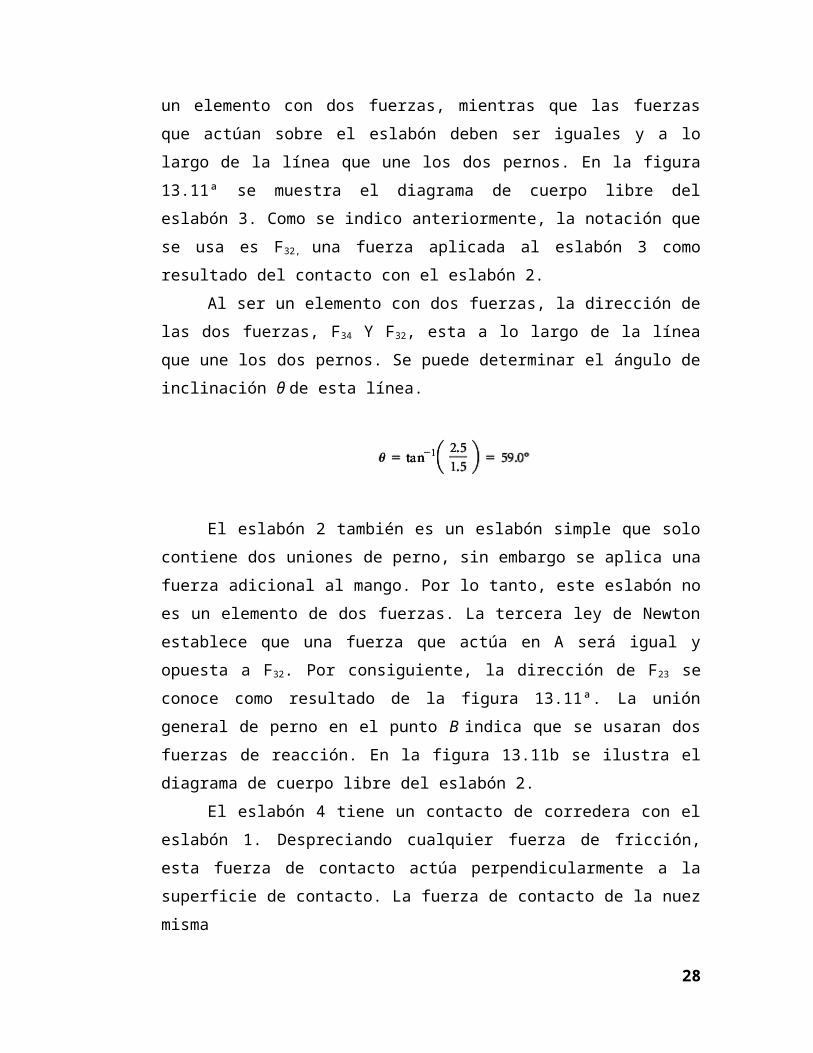
este eslabón. Por lo tanto, es un elemento con dos fuerzas, mientras que
las fuerzas que actúan sobre el eslabón deben ser iguales y a lo largo de la
línea que une los dos pernos. En la figura 13.11ª se muestra el diagrama de
cuerpo libre del eslabón 3. Como se indico anteriormente, la notación que
se usa es F32, una fuerza aplicada al eslabón 3 como resultado del contacto
con el eslabón 2.
Al ser un elemento con dos fuerzas, la dirección de las dos fuerzas,
F34 Y F32, esta a lo largo de la línea que une los dos pernos. Se puede
determinar el ángulo de inclinación θ de esta línea.
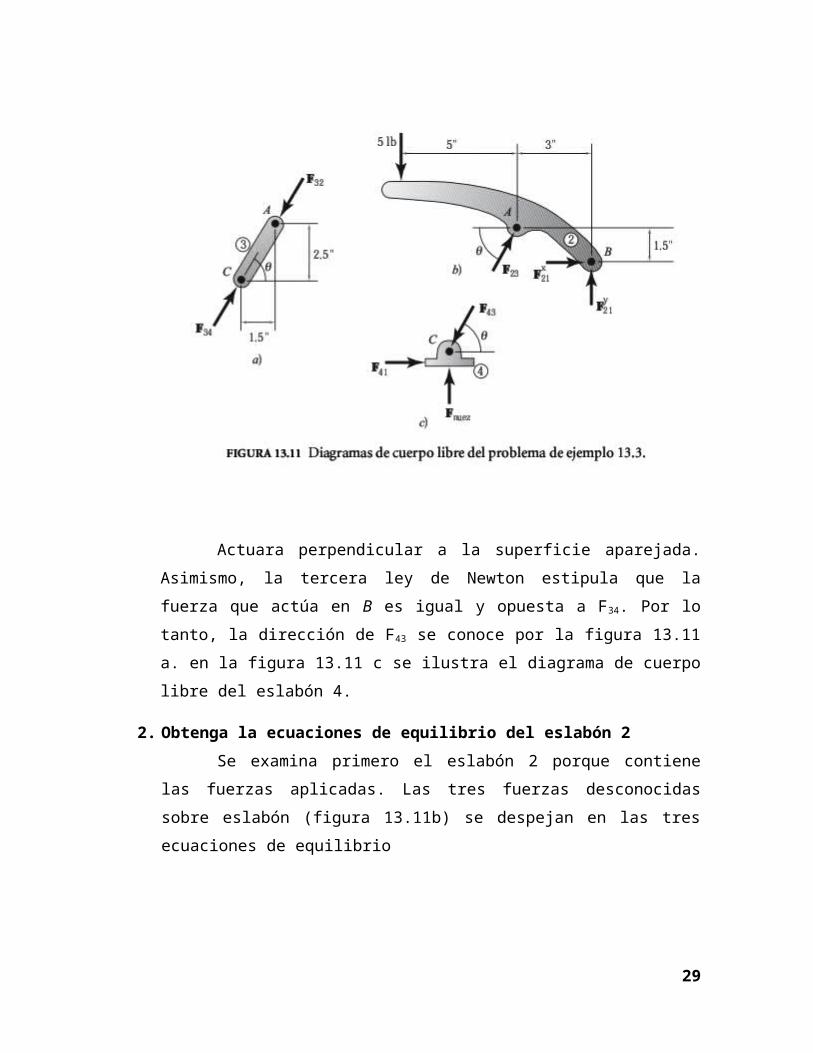
El eslabón 2 también es un eslabón simple que solo contiene dos
uniones de perno, sin embargo se aplica una fuerza adicional al mango. Por
lo tanto, este eslabón no es un elemento de dos fuerzas. La tercera ley de
Newton establece que una fuerza que actúa en A será igual y opuesta a F32.
Por consiguiente, la dirección de F23 se conoce como resultado de la figura
22
13.11ª. La unión general de perno en el punto B indica que se usaran dos
fuerzas de reacción. En la figura 13.11b se ilustra el diagrama de cuerpo
libre del eslabón 2.
El eslabón 4 tiene un contacto de corredera con el eslabón 1.
Despreciando cualquier fuerza de fricción, esta fuerza de contacto actúa
perpendicularmente a la superficie de contacto. La fuerza de contacto de la
nuez misma
Actuara perpendicular a la superficie aparejada. Asimismo, la
tercera ley de Newton estipula que la fuerza que actúa en B es igual y
opuesta a F34. Por lo tanto, la dirección de F43 se conoce por la figura 13.11
a. en la figura 13.11 c se ilustra el diagrama de cuerpo libre del eslabón 4.
2. Obtenga la ecuaciones de equilibrio del eslabón 2
Se examina primero el eslabón 2 porque contiene las fuerzas
aplicadas. Las tres fuerzas desconocidas sobre eslabón (figura 13.11b) se
despejan en las tres ecuaciones de equilibrio
23
3. Obtenga las ecuaciones de equilibrio del eslabón 3
Como el eslabón 3 es un elemento de dos fuerzas (figura 13.11a),
las ecuaciones de equilibrio indican que las fuerzas son de la misma
magnitud, actúan a lo largo de la misma línea y tiene sentidos puestos.
Desde luego, la tercera ley de Newton indica que F32 = F23. Por lo tanto, las
fuerzas que actúan sobre el eslabón 3 son:
4. Obtenga las ecuaciones de equilibrio del eslabón 4
El diagrama de cuerpo libre del eslabón 4 (figura 13.11c) revela la
fuerza ejercida sobre la nuez. Por supuesto, la tercera ley de Newton
establece que F34 = F43. Como las fuerzas sobre el eslabón 4 convergen en
un punto, no se aplica la ecuación de equilibrio de momento. Las dos
fuerzas desconocidas sobre este eslabón se obtienen usando las dos
ecuaciones de las componentes de equilibrio.
24
Resolviendo se obtiene
ANÁLISIS ESTÁTICO CON FRICCIÓN
A. En la figura se ilustra una leva y un seguidor de movimiento
alternativo. El seguidor se mantiene en contacto con la leva por medio
de un resorte que empuja hacia abajo en C, con una fuerza de resorte
Fc= 12 N para esta posición en particular. Asimismo, una carga
externa FE= 35 N actúa en E sobre el seguidor, en la dirección
señalada. Determínese la fuerza necesaria en A para mantener el
equilibrio.
Como siempre que se inicia un análisis de fuerzas con fricción, es necesario
resolver primero rodo el problema sin fricción. El propósito es hallar la dirección de
cada fuerza normal, en este caso FNB Y FN
D.
En el siguiente paso en la solución es examinar con cuidad el enunciado del
problema y determinar la dirección del movimiento eminente. Como se expresa, el
problema pide la fuerza mínima en A para mantener el equilibrio; es decir, si FA
fuera de cualquier magnitud menor, el sistema se movería hacia abajo. Por
consiguiente, el movimiento inminente es hacia abajo con las velocidad VD4/1 Y VB4/1,
POR ENDE, las dos fuerzas de fricción en B y D deben actuar hacia arriba sobre
25

el eslabón 4. Nótese que si el enunciado del problema hubiera pedido la fuerza
máxima en A, el movimiento inminente del eslabón 4 seria hacia arriba y las
fuerzas de fricción, hacia abajo sobre el eslabón 4.
A continuación se dibuja el diagrama de cuerpo libre, como se indica en la
figura. En este caso, debido a la fricción estática, las línea de acción de FB y FD se
muestran inclinadas formando el ángulo Φ que se pude calcula
Φ= tan-10.15= 8.5o
Al decidir la dirección de inclinación de los ángulos Φ, fue necesario conocer
tanto la dirección de las fuerzas de fricción (hacia arriba) como la de las fuerzas
normales (hacia la derecha) en B y D. esto explica porque se debe realizar primero
la resolución sin fricción
Ahora se conocen las nuevas líneas de acción de las fuerzas FB y FD, se
puede desarrollar la solución. En la siguiente se tiene la solución con fricción.
26
FA= 45.8 N FB= 27.8 N Y FD= 6.57 N
B. El mecanismo de yugo escocés mostrado en la figura 13.15 sirve para
impulsar una válvula. Conforme el fluido se bombea en el cilindro, la
presión creciente impulsa el mecanismo y aplica un torque al eje de
salida. Este torque se utiliza para activar (abrir y cerrar) las válvulas.
En el instante mostrado, la carga de presión sobre el pistón es de 25
lb. Determine el torque generado sobre el eje de salida. El coeficiente
de fricción entre el perno seguidor y la ranura en la cruceta es de 0,15.
27
1. Elabore el diagrama cinemática del mecanismo
En la figura 13.16 se presenta el diagrama cinemática del mecanismo de
yugo escocés
2. Elabore los diagramas de cuerpo libre de los eslabones del
mecanismo
El eslabón 2 es el ensamble de cruceta en la ranura y el pistón/
varilla. El eslabón 4 es el seguidor. Observe que el eslabón 3 no es un
eslabón tangible. Se utiliza como una simulación cinemática para separar la
unión de giro sobre el seguidor y la unión de corredera en la ranura de la
cruceta. Entonces, el mecanismo se modela con todas las uniones de
menor orden. El diagrama cinemático tiene cuatro eslabones, dos uniones
de perno y, por ende, un grado de libertad. El impulsor de este mecanismo
es el movimiento del fluido dentro del cilindro.
En la figura 13.17 se ilustran los diagramas de cuerpo libre de los
eslabones 2 y 4. El eslabón 3 no se requiere en el análisis de fuerza.
Advierta que la fuerza de fricción se muestra en sentido opuesto al
movimiento relativo. La dirección quizá parezca confusa y necesite una
explicación adicional.
28
Considere el eslabón 4 (figura 13.17b). El perno se mueve hacia
arriba en relación con la ranura de cruceta. Por lo tanto, la fricción actúa
hacia abajo para impedir este movimiento del perno. Asimismo, considere el
eslabón 2 (figura 13.17 a). La ranura se mueve hacia abajo en relación con
el perno (recuerde la definición de movimiento relativo). Entonces, la
fricción actuara hacia arriba para evitar este movimiento de la ranura.
3. Obtenga las ecuaciones de equilibrio del eslabón 2.
El eslabón 2 (figura 13.17 a) se examina primero porque contiene la
fuerza aplicada. En este análisis, solo se requiera la ecuación de equilibrio
en x.
4. Obtenga las ecuaciones de equilibrio del eslabón 4.
El diagrama de cuerpo libre del eslabón 4 (figura13.17 b) mostrara el
torque en el eje de salida. Desde luego, la primera ley de Newton indica
F42= F24
El torque se determina usando la ecuación de momento de equilibrio.
29

Finalmente, el torque ejercido sobre el eje de salida es:
30