
Mecanismos 1
101
-
Upload
interfaceselectronicas -
Category
Engineering
-
view
530 -
download
8
description
Taller de mecanismos para artistas, impartido en Centro Multimedia del Centro Nacional de las Artes. Impartido por Juan Galindo
Transcript of Mecanismos 1

Introducción
En este curso se abordaran los diferentes tipos de mecanismos simples y algunoscomplejos tales como poleas, biela-manivela, leva, puntos de apoyo, engranajes,transmisiones con cadenas y piñones, tornillos sin fin, etc., así mismo se expondrán losdiferentes tipos de actuadores que existen como motores paso a paso, motores decorriente directa, servomotores, motorreductores, motores lineales, alambresmusculares y solenoides los cuales al aplicarse a las creaciones realizadas permitirán darmovimiento a los mecanismos y estructuras.
Muchas de las instalaciones de artistas cuya obra se basa en estructuras móviles,regularmente encuentran problemas sobre el tipo de mecanismo a utilizar para cumplirun objetivo en particular, de esto surge la idea de crear este primer taller que trata sobremecanismos que servirán no solo para la construcción de entes móviles sino también delos materiales y las precauciones que hay que guardar al momento de realizar unainstalación en espacios donde está prohibido perforar o donde las paredes estánconstruidas con materiales ligeros.
La intención es que cada uno de los alumnos que este tomando este curso, puedaexperimentar la creación de algún objeto que pueda moverse, ya sea de forma manual outilizando algún tipo de ayuda a partir de elementos conocidos como actuadores, quesepa qué tipo de materiales, háblese de plásticos, madera o metales pueden soportar lasestructuras que tienen en mente, que tipo de tornillos, pijas, rondanas, tuercas lepueden facilitar la seguridad de su trabajo, tanto si este es fijo o móvil, también esimportante que conozca las herramientas mínimas indispensables que se requieren parapoder lograr su objetivo. Que se entere cómo otros artistas han resuelto sus proyectos y
observe el funcionamiento de estos.
Los sistemas mecánicos que comúnmente observamos y que construirán ustedes pueden presentardiversas formas.Aunque, antes de que iniciemos con la construcción de máquinas, necesitamos conocer algunostérminos que más adelante nos serán de gran ayuda:
• Se llama mecanismo al conjunto de elementos rígidos o móviles unidos entre sí mediantediferentes tipos de uniones, cuyo propósito es la transmisión de movimientos y/o fuerzas..
• Una máquina es cualquier dispositivo que nos ayuda a hacer el trabajo, comopuede ser un martillo o una bicicleta por ejemplo.
Un martillo es una máquina ya que a medida que su brazo es más largo, puede hacer más trabajo.
Trabajo = Fuerza x Distancia
Fuerza (F) es igual a la masa (m) multiplicada por la aceleración (a), y se escribe como F = ma(también conocida como la segunda ley de Newton).
Antecedentes
Fuerza es todo aquello capaz de deformar un cuerpo (efecto estático) o de alterar su estado demovimiento o de reposo (efecto dinámico).
Estructura es el conjunto de elementos de un cuerpo destinado a soportar los efectos de las fuerzaque actúan sobre él. La estructura impide así, que el cuerpo se rompa o se deforme enexceso.
Condiciones de seguridad resistente, rígida, estable.
Esfuerzo es la tensión interna que experimentan los cuerpos sometidos a la acción de unao varias fuerzas.
Las estructuras son un conjunto de elementos que convenientemente unidosentre sí, son capaces de soportar los esfuerzos a los que son sometidos sin deformarse, nicaerse.
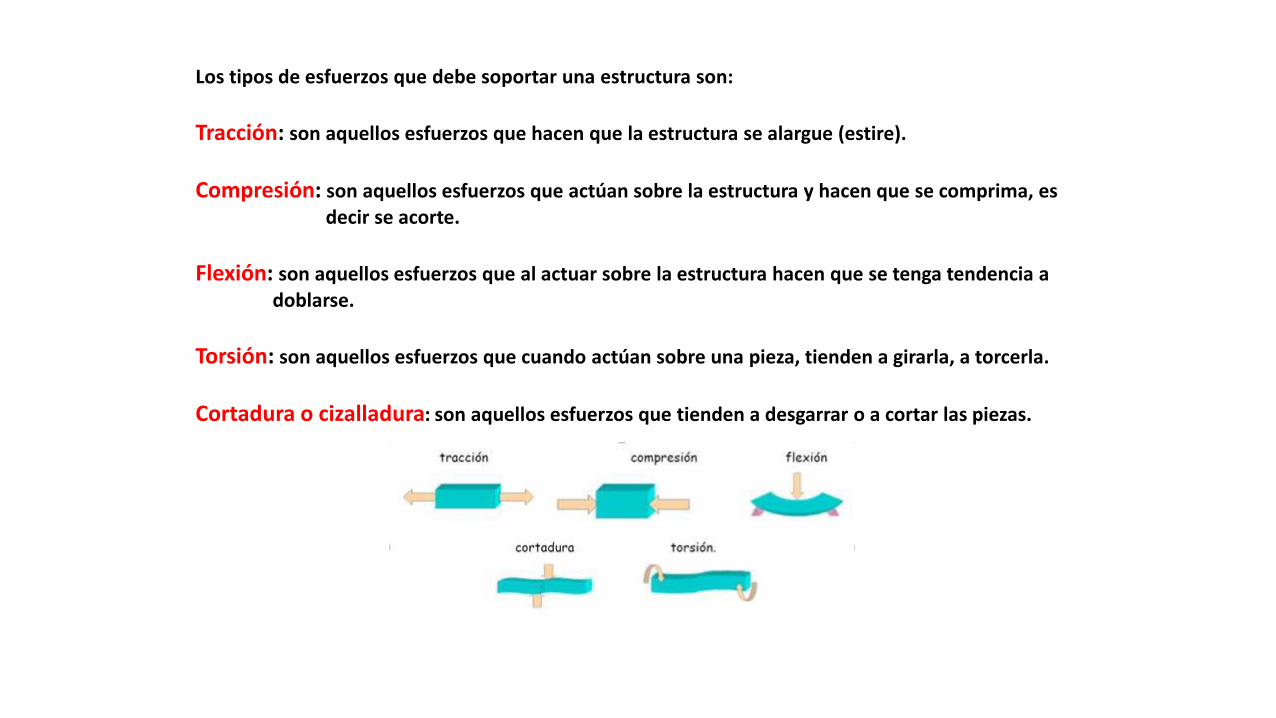
Los tipos de esfuerzos que debe soportar una estructura son:
Tracción: son aquellos esfuerzos que hacen que la estructura se alargue (estire).
Compresión: son aquellos esfuerzos que actúan sobre la estructura y hacen que se comprima, es decir se acorte.
Flexión: son aquellos esfuerzos que al actuar sobre la estructura hacen que se tenga tendencia adoblarse.
Torsión: son aquellos esfuerzos que cuando actúan sobre una pieza, tienden a girarla, a torcerla.
Cortadura o cizalladura: son aquellos esfuerzos que tienden a desgarrar o a cortar las piezas.

Las seis máquinas simples
Los cuatro usos principales de las máquinas son:
1. Transformar la energía2. Transferir energía3. Multiplicar y/o cambiar la dirección de una fuerza4. Multiplicar o dividir la velocidad
Todas las máquinas que conocemos están hechas de combinacionesde las seis máquinas simples clásicas: la palanca, polea, rueda y eje, planoinclinado, tornillo y engranajes.
Estas máquinas son fáciles de detectar a nuestro alrededor una vez que sabemos qué buscar.
1. Palancas
Se puede considerar a una palanca una máquina de un solo mecanismo. Revisando la definición anterior es claro que se trata de un mecanismo, ya que tiene partes en movimiento. Es una máquina porque nos ayuda a hacer el trabajo.
Una palanca es un objeto rígido utilizado con un punto de apoyo para multiplicar la fuerza mecánica sobre un objeto. Hay tres clases diferentes de palancas. Cada tipo de palanca tiene tres componentes dispuestos de diferentes maneras:
1. Fulcro (punto de apoyo) 2. Entrada (esfuerzo o la fuerza) 3. Salida (carga o resistencia)
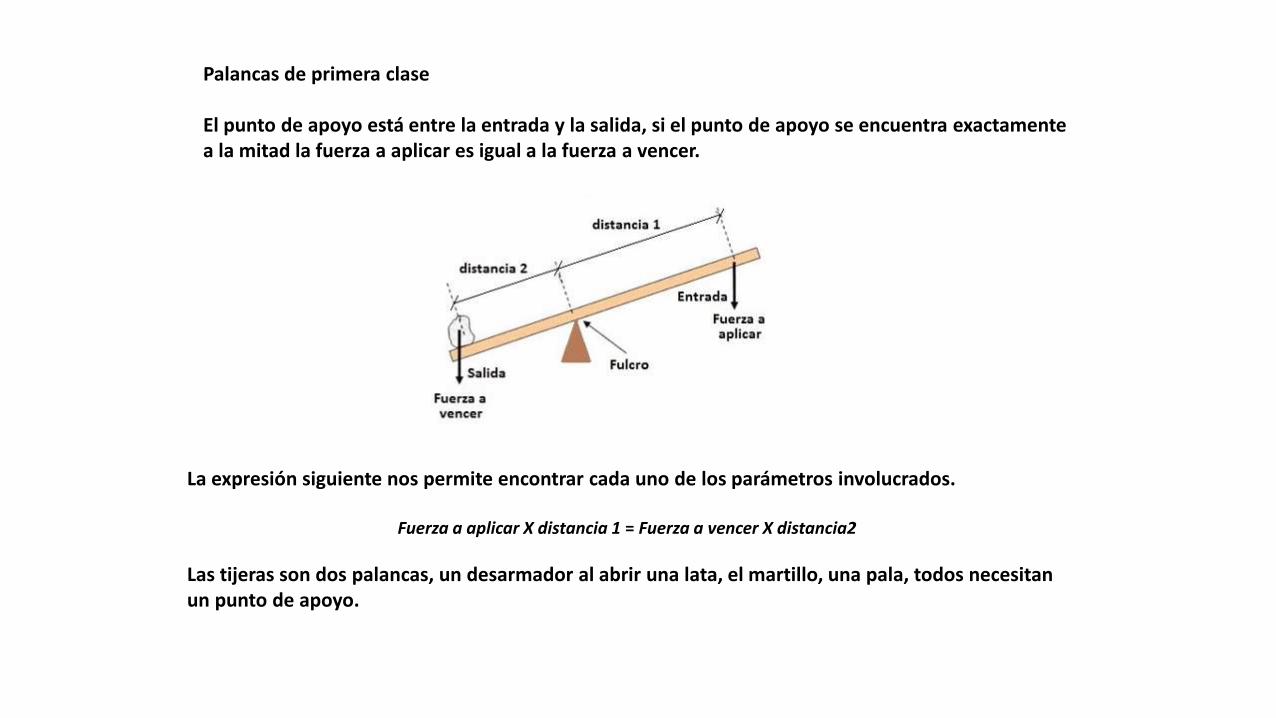
La expresión siguiente nos permite encontrar cada uno de los parámetros involucrados.
Fuerza a aplicar X distancia 1 = Fuerza a vencer X distancia2
Las tijeras son dos palancas, un desarmador al abrir una lata, el martillo, una pala, todos necesitan un punto de apoyo.
Palancas de primera clase
El punto de apoyo está entre la entrada y la salida, si el punto de apoyo se encuentra exactamente a la mitad la fuerza a aplicar es igual a la fuerza a vencer.
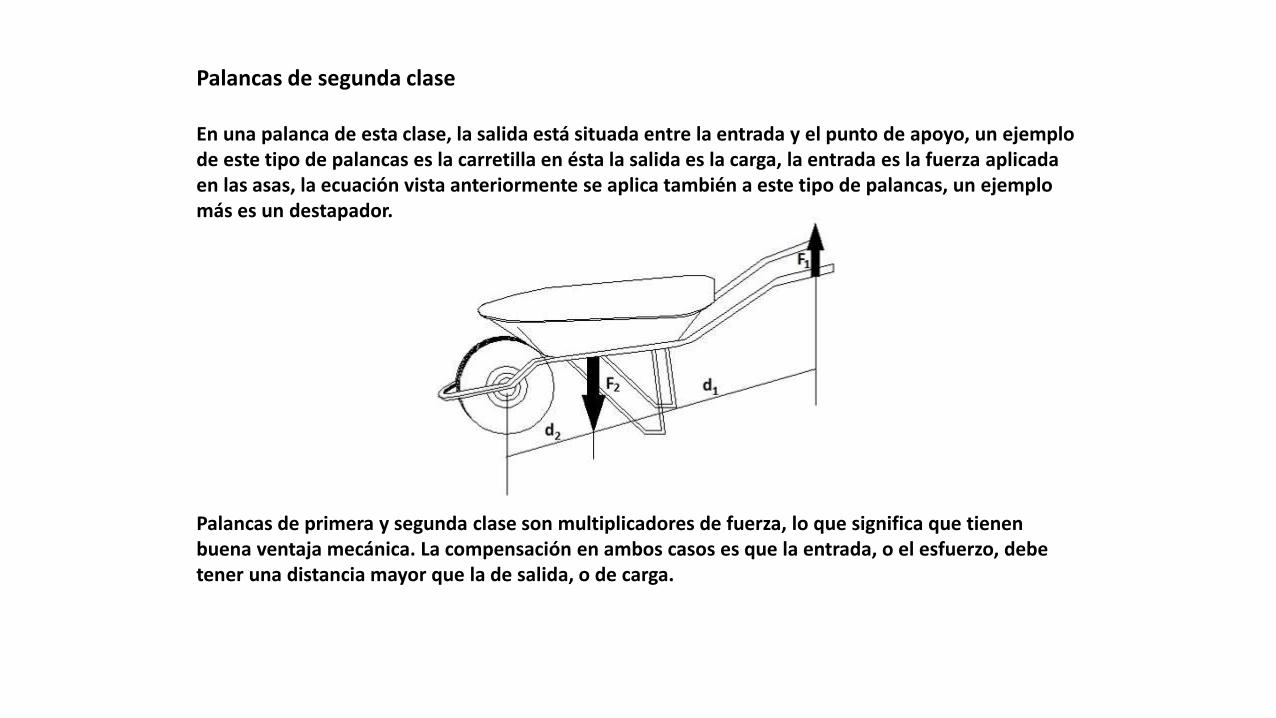
Palancas de segunda clase
En una palanca de esta clase, la salida está situada entre la entrada y el punto de apoyo, un ejemplo de este tipo de palancas es la carretilla en ésta la salida es la carga, la entrada es la fuerza aplicada en las asas, la ecuación vista anteriormente se aplica también a este tipo de palancas, un ejemplo más es un destapador.
Palancas de primera y segunda clase son multiplicadores de fuerza, lo que significa que tienen buena ventaja mecánica. La compensación en ambos casos es que la entrada, o el esfuerzo, debe tener una distancia mayor que la de salida, o de carga.
Palancas de tercera clase
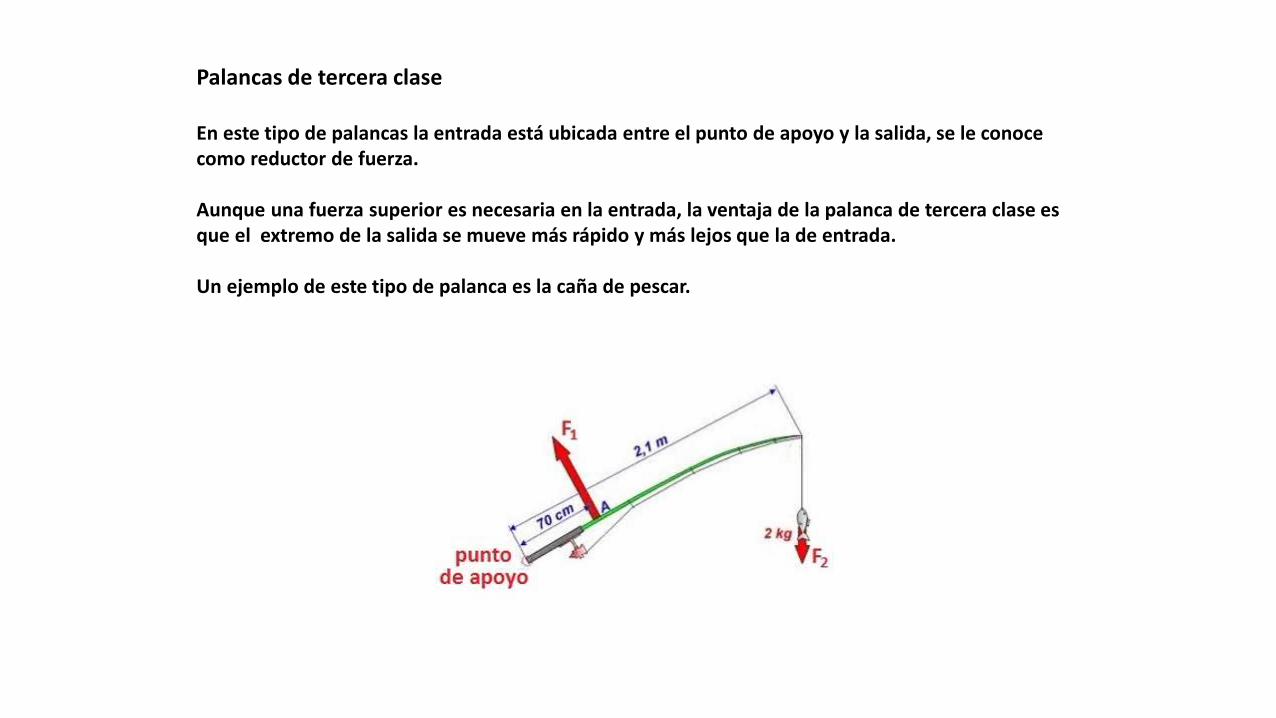
En este tipo de palancas la entrada está ubicada entre el punto de apoyo y la salida, se le conoce como reductor de fuerza.
Aunque una fuerza superior es necesaria en la entrada, la ventaja de la palanca de tercera clase es que el extremo de la salida se mueve más rápido y más lejos que la de entrada.
Un ejemplo de este tipo de palanca es la caña de pescar.
2. Poleas
Es básicamente una rueda con un ranura en su borde donde generalmente se coloca una cuerda ocinturón . Es otra máquina simple que se puede utilizar para obtener ventajas mecánicas en unsistema . Existen dos tipos de sistemas de poleas, llamados cerrados y abiertos .
Sistema cerrado
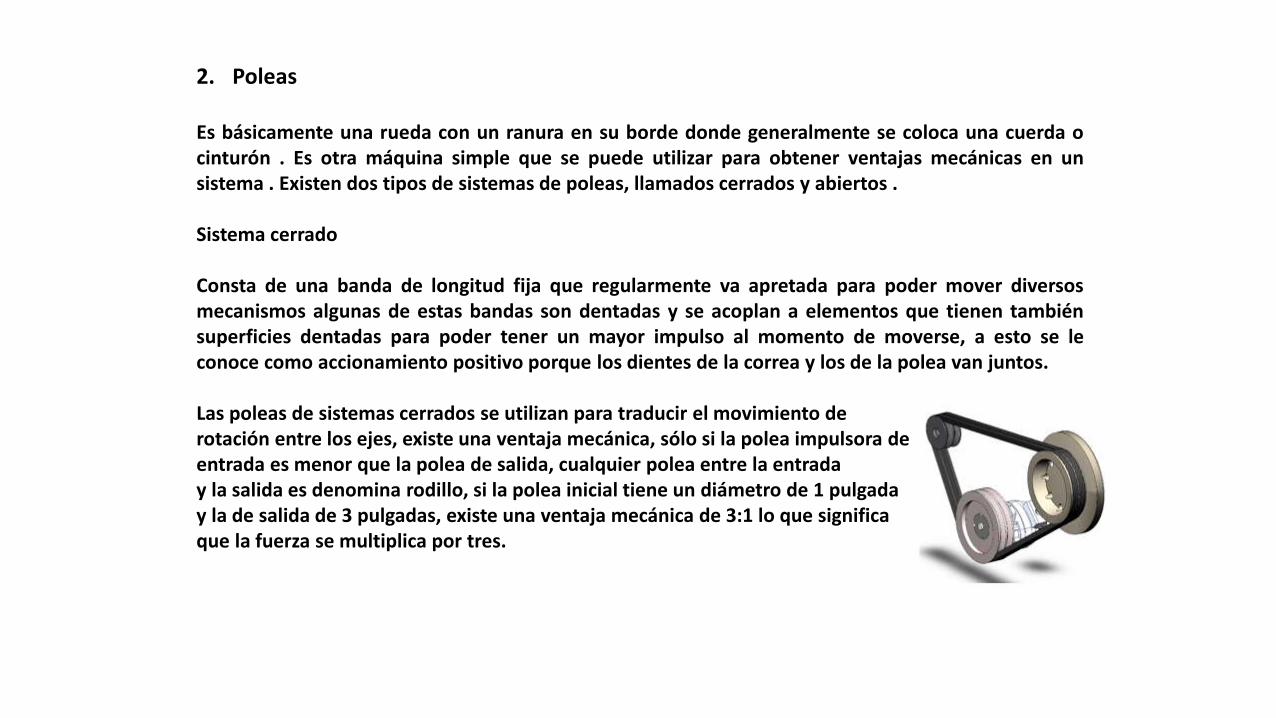
Consta de una banda de longitud fija que regularmente va apretada para poder mover diversosmecanismos algunas de estas bandas son dentadas y se acoplan a elementos que tienen tambiénsuperficies dentadas para poder tener un mayor impulso al momento de moverse, a esto se leconoce como accionamiento positivo porque los dientes de la correa y los de la polea van juntos.
Las poleas de sistemas cerrados se utilizan para traducir el movimiento derotación entre los ejes, existe una ventaja mecánica, sólo si la polea impulsora deentrada es menor que la polea de salida, cualquier polea entre la entraday la salida es denomina rodillo, si la polea inicial tiene un diámetro de 1 pulgaday la de salida de 3 pulgadas, existe una ventaja mecánica de 3:1 lo que significaque la fuerza se multiplica por tres.
Sistema abierto
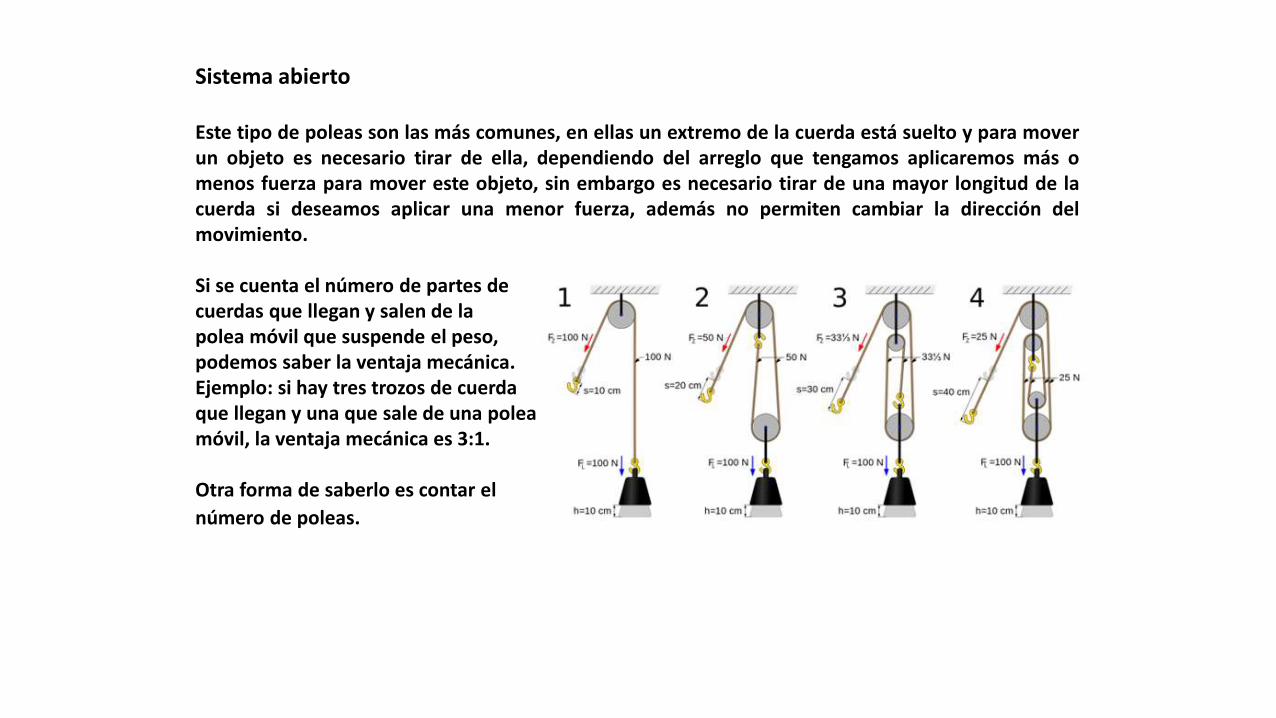
Este tipo de poleas son las más comunes, en ellas un extremo de la cuerda está suelto y para moverun objeto es necesario tirar de ella, dependiendo del arreglo que tengamos aplicaremos más omenos fuerza para mover este objeto, sin embargo es necesario tirar de una mayor longitud de lacuerda si deseamos aplicar una menor fuerza, además no permiten cambiar la dirección delmovimiento.
Si se cuenta el número de partes decuerdas que llegan y salen de lapolea móvil que suspende el peso,podemos saber la ventaja mecánica.Ejemplo: si hay tres trozos de cuerdaque llegan y una que sale de una poleamóvil, la ventaja mecánica es 3:1.
Otra forma de saberlo es contar el
número de poleas.
Rapidez y velocidad
Cuando un objeto se mueve de un punto a otro en un determinado tiempo hablamos de rapidez y loexpresamos regularmente en m/s o Km/h, la rapidez es una magnitud escalar que nos indica larazón de cambio de un objeto en una sola dirección.
La velocidad es una cantidad vectorial que nos indica la razón a la cual un objeto cambia suposición, al ser vectorial tiene magnitud, dirección y sentido.
La velocidad de rotación también llamada velocidad angular, es la velocidad de algo que gira, seexpresa regularmente en revoluciones por segundo (rps) o revoluciones por minuto (rpm) y sesimboliza con la letra ω.
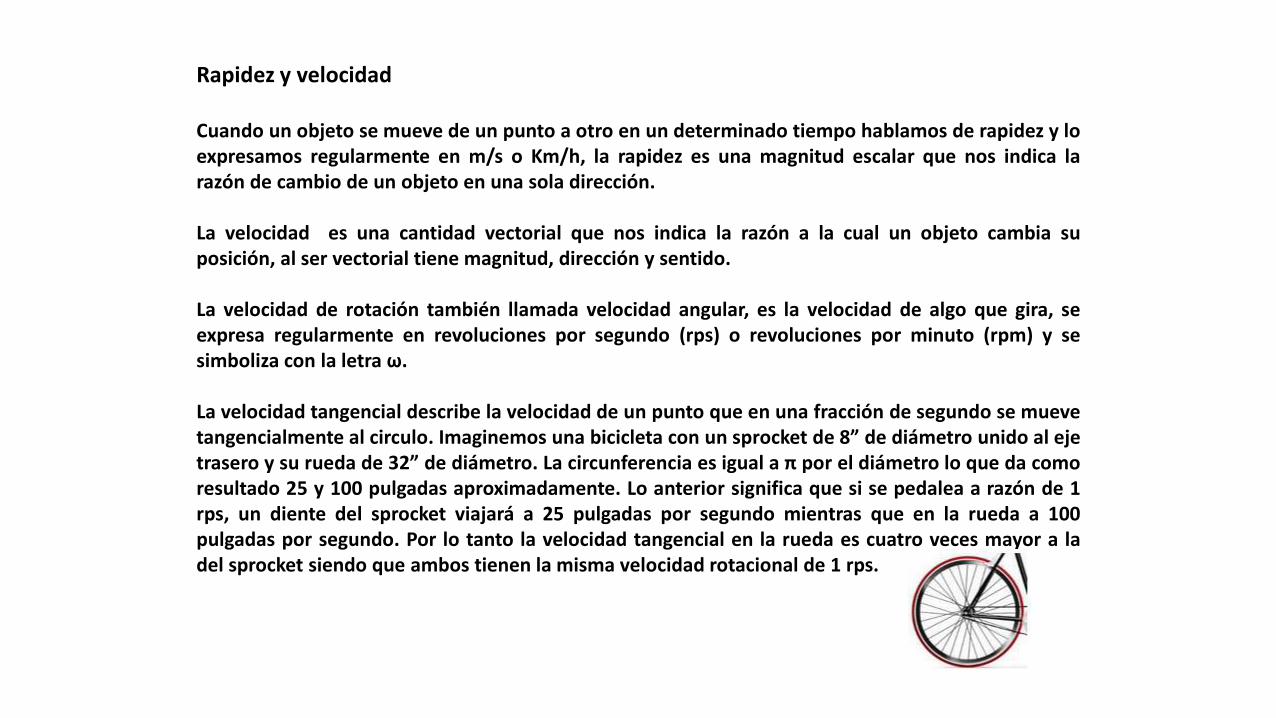
La velocidad tangencial describe la velocidad de un punto que en una fracción de segundo se muevetangencialmente al circulo. Imaginemos una bicicleta con un sprocket de 8” de diámetro unido al ejetrasero y su rueda de 32” de diámetro. La circunferencia es igual a π por el diámetro lo que da comoresultado 25 y 100 pulgadas aproximadamente. Lo anterior significa que si se pedalea a razón de 1rps, un diente del sprocket viajará a 25 pulgadas por segundo mientras que en la rueda a 100pulgadas por segundo. Por lo tanto la velocidad tangencial en la rueda es cuatro veces mayor a ladel sprocket siendo que ambos tienen la misma velocidad rotacional de 1 rps.
3 . Rueda y Eje
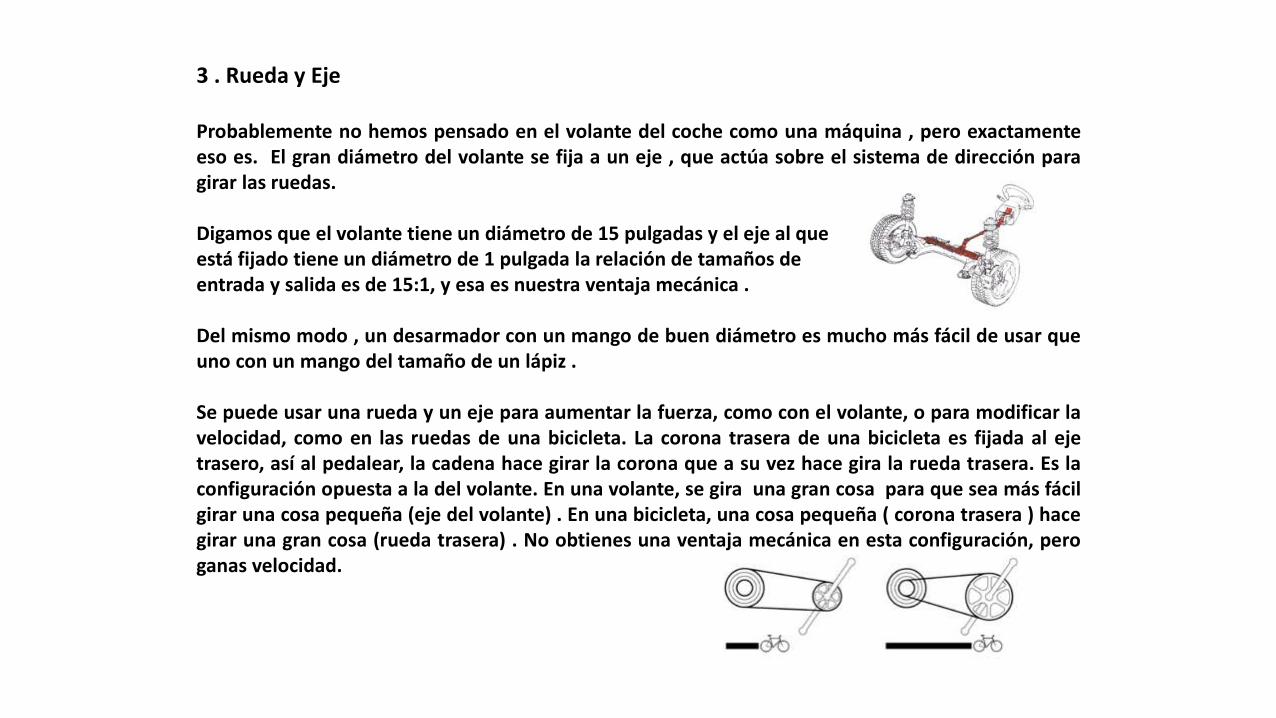
Probablemente no hemos pensado en el volante del coche como una máquina , pero exactamenteeso es. El gran diámetro del volante se fija a un eje , que actúa sobre el sistema de dirección paragirar las ruedas.
Digamos que el volante tiene un diámetro de 15 pulgadas y el eje al queestá fijado tiene un diámetro de 1 pulgada la relación de tamaños deentrada y salida es de 15:1, y esa es nuestra ventaja mecánica .
Del mismo modo , un desarmador con un mango de buen diámetro es mucho más fácil de usar queuno con un mango del tamaño de un lápiz .
Se puede usar una rueda y un eje para aumentar la fuerza, como con el volante, o para modificar lavelocidad, como en las ruedas de una bicicleta. La corona trasera de una bicicleta es fijada al ejetrasero, así al pedalear, la cadena hace girar la corona que a su vez hace gira la rueda trasera. Es laconfiguración opuesta a la del volante. En una volante, se gira una gran cosa para que sea más fácilgirar una cosa pequeña (eje del volante) . En una bicicleta, una cosa pequeña ( corona trasera ) hacegirar una gran cosa (rueda trasera) . No obtienes una ventaja mecánica en esta configuración, peroganas velocidad.
Planos inclinados y cuñas
La rampa o plano inclinado , es una máquina simple.
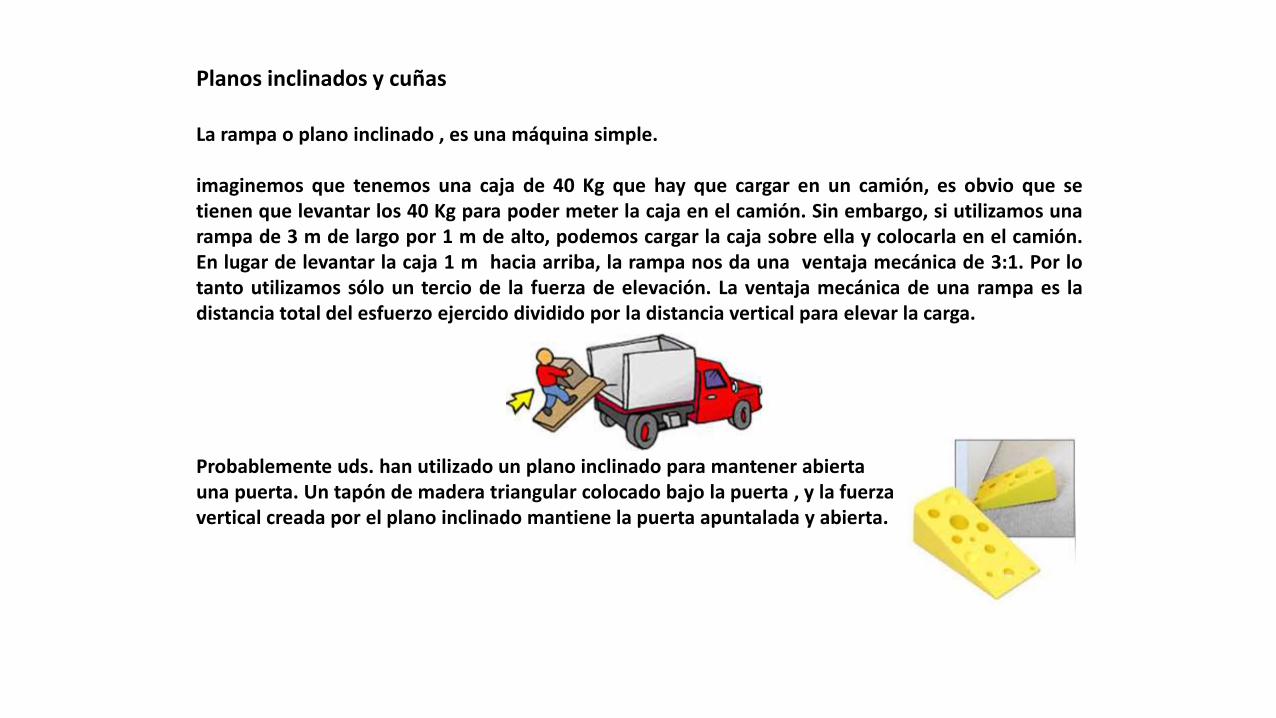
imaginemos que tenemos una caja de 40 Kg que hay que cargar en un camión, es obvio que setienen que levantar los 40 Kg para poder meter la caja en el camión. Sin embargo, si utilizamos unarampa de 3 m de largo por 1 m de alto, podemos cargar la caja sobre ella y colocarla en el camión.En lugar de levantar la caja 1 m hacia arriba, la rampa nos da una ventaja mecánica de 3:1. Por lotanto utilizamos sólo un tercio de la fuerza de elevación. La ventaja mecánica de una rampa es ladistancia total del esfuerzo ejercido dividido por la distancia vertical para elevar la carga.
Probablemente uds. han utilizado un plano inclinado para mantener abiertauna puerta. Un tapón de madera triangular colocado bajo la puerta , y la fuerzavertical creada por el plano inclinado mantiene la puerta apuntalada y abierta.
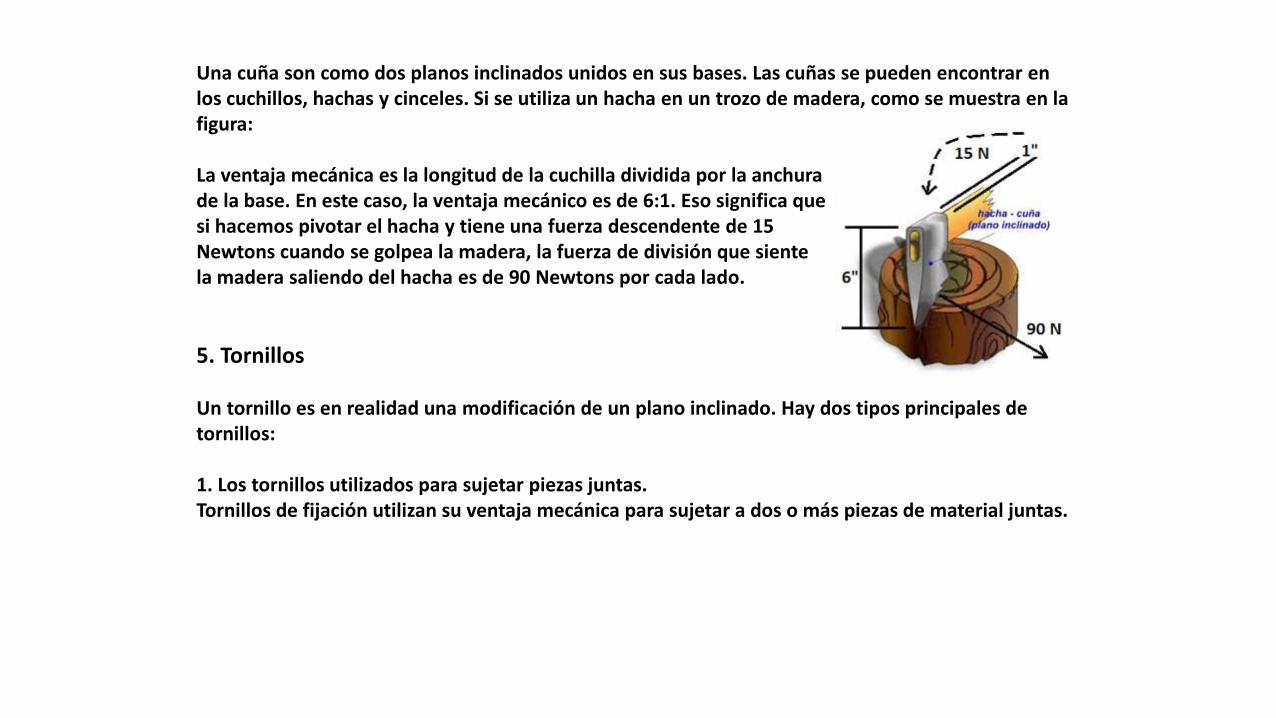
Una cuña son como dos planos inclinados unidos en sus bases. Las cuñas se pueden encontrar en los cuchillos, hachas y cinceles. Si se utiliza un hacha en un trozo de madera, como se muestra en la figura:
La ventaja mecánica es la longitud de la cuchilla dividida por la anchurade la base. En este caso, la ventaja mecánico es de 6:1. Eso significa quesi hacemos pivotar el hacha y tiene una fuerza descendente de 15Newtons cuando se golpea la madera, la fuerza de división que sientela madera saliendo del hacha es de 90 Newtons por cada lado.
5. Tornillos
Un tornillo es en realidad una modificación de un plano inclinado. Hay dos tipos principales de tornillos:
1. Los tornillos utilizados para sujetar piezas juntas. Tornillos de fijación utilizan su ventaja mecánica para sujetar a dos o más piezas de material juntas.
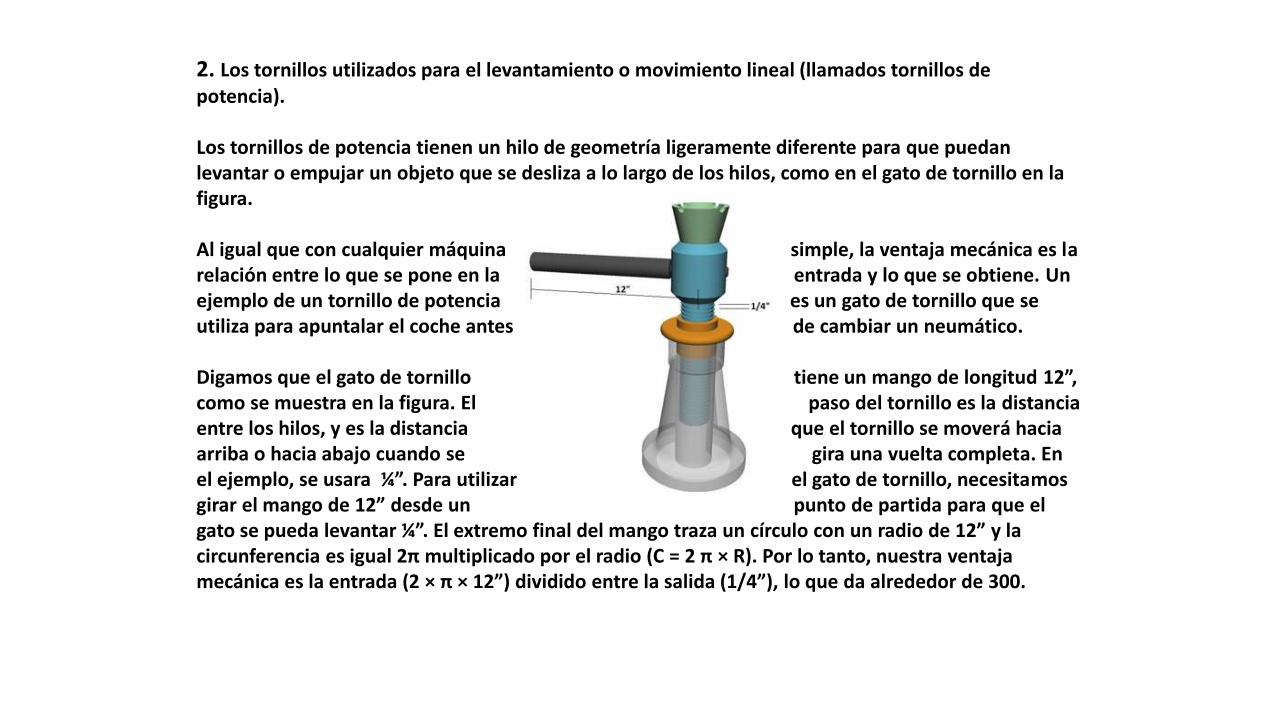
2. Los tornillos utilizados para el levantamiento o movimiento lineal (llamados tornillos de potencia).
Los tornillos de potencia tienen un hilo de geometría ligeramente diferente para que puedan levantar o empujar un objeto que se desliza a lo largo de los hilos, como en el gato de tornillo en la figura.
Al igual que con cualquier máquina simple, la ventaja mecánica es la relación entre lo que se pone en la entrada y lo que se obtiene. Un ejemplo de un tornillo de potencia es un gato de tornillo que se utiliza para apuntalar el coche antes de cambiar un neumático.
Digamos que el gato de tornillo tiene un mango de longitud 12”, como se muestra en la figura. El paso del tornillo es la distancia entre los hilos, y es la distancia que el tornillo se moverá hacia arriba o hacia abajo cuando se gira una vuelta completa. En el ejemplo, se usara ¼”. Para utilizar el gato de tornillo, necesitamosgirar el mango de 12” desde un punto de partida para que elgato se pueda levantar ¼”. El extremo final del mango traza un círculo con un radio de 12” y la circunferencia es igual 2π multiplicado por el radio (C = 2 π × R). Por lo tanto, nuestra ventaja mecánica es la entrada (2 × π × 12”) dividido entre la salida (1/4”), lo que da alrededor de 300.
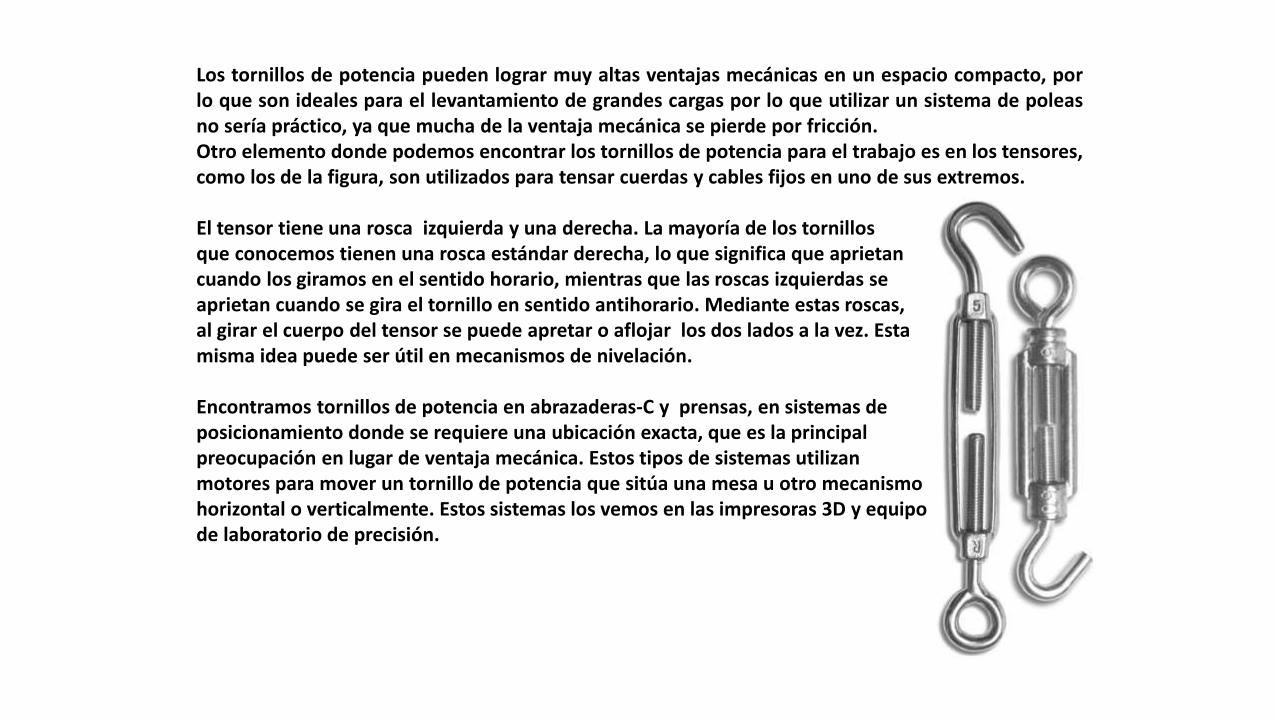
Los tornillos de potencia pueden lograr muy altas ventajas mecánicas en un espacio compacto, porlo que son ideales para el levantamiento de grandes cargas por lo que utilizar un sistema de poleasno sería práctico, ya que mucha de la ventaja mecánica se pierde por fricción.Otro elemento donde podemos encontrar los tornillos de potencia para el trabajo es en los tensores,como los de la figura, son utilizados para tensar cuerdas y cables fijos en uno de sus extremos.
El tensor tiene una rosca izquierda y una derecha. La mayoría de los tornillosque conocemos tienen una rosca estándar derecha, lo que significa que aprietancuando los giramos en el sentido horario, mientras que las roscas izquierdas seaprietan cuando se gira el tornillo en sentido antihorario. Mediante estas roscas,al girar el cuerpo del tensor se puede apretar o aflojar los dos lados a la vez. Estamisma idea puede ser útil en mecanismos de nivelación.
Encontramos tornillos de potencia en abrazaderas-C y prensas, en sistemas deposicionamiento donde se requiere una ubicación exacta, que es la principalpreocupación en lugar de ventaja mecánica. Estos tipos de sistemas utilizanmotores para mover un tornillo de potencia que sitúa una mesa u otro mecanismohorizontal o verticalmente. Estos sistemas los vemos en las impresoras 3D y equipode laboratorio de precisión.

6. Engranajes
Los engranajes se utilizan para aumentar o reducir la fuerza, cambiar la dirección o ejes de rotación, o incrementar o disminuir la velocidad. Dos o más engranajes en la línea entre la entrada y salida que se conoce como un tren de transmisión. Los trenes de transmisión que son encerrados en carcasas son llamados cajas de engranes o reductores. Los dientes de los engranajes siempre engranan mientras ellos se están moviendo, por lo que una de tren de engranajes es un ejemplo de una unidad positiva.
Tipos de engranajes
Hay muchos tipos de engranajes y formas de usarlos. Veamos los cinco tipos básicos de engranajes: de dientes rectos, cremallera y piñón, cónico, de tornillo y planetario.
Engranaje recto
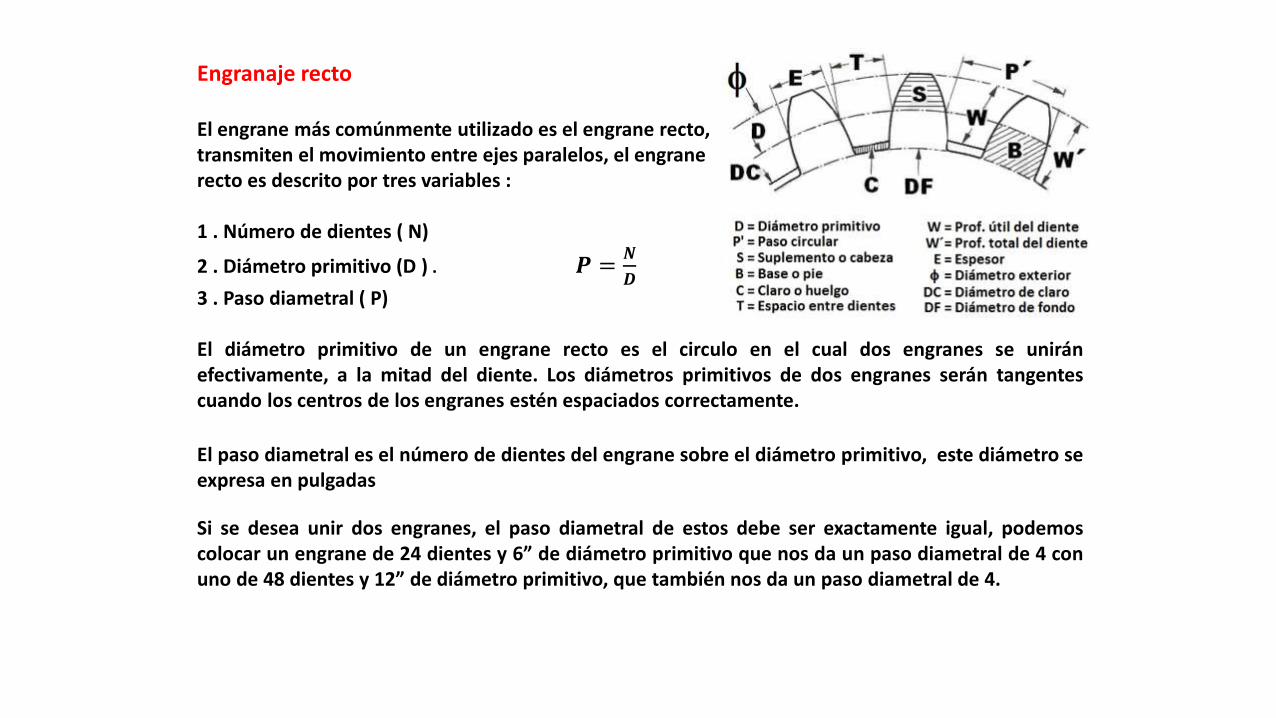
El engrane más comúnmente utilizado es el engrane recto,transmiten el movimiento entre ejes paralelos, el engranerecto es descrito por tres variables :
1 . Número de dientes ( N)
2 . Diámetro primitivo (D ) . 𝑷 =𝑵
𝑫3 . Paso diametral ( P)
El diámetro primitivo de un engrane recto es el circulo en el cual dos engranes se uniránefectivamente, a la mitad del diente. Los diámetros primitivos de dos engranes serán tangentescuando los centros de los engranes estén espaciados correctamente.
El paso diametral es el número de dientes del engrane sobre el diámetro primitivo, este diámetro seexpresa en pulgadas
Si se desea unir dos engranes, el paso diametral de estos debe ser exactamente igual, podemoscolocar un engrane de 24 dientes y 6” de diámetro primitivo que nos da un paso diametral de 4 conuno de 48 dientes y 12” de diámetro primitivo, que también nos da un paso diametral de 4.
Cremallera y piñón
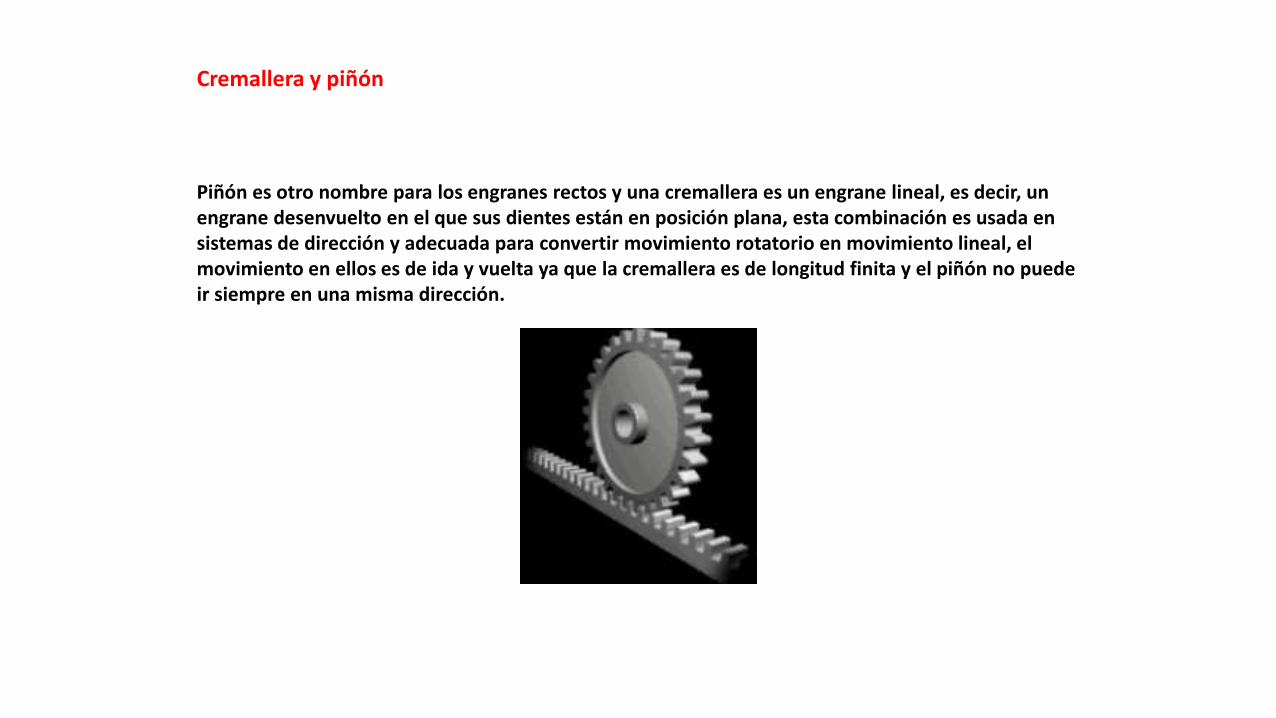
Piñón es otro nombre para los engranes rectos y una cremallera es un engrane lineal, es decir, un engrane desenvuelto en el que sus dientes están en posición plana, esta combinación es usada en sistemas de dirección y adecuada para convertir movimiento rotatorio en movimiento lineal, el movimiento en ellos es de ida y vuelta ya que la cremallera es de longitud finita y el piñón no puede ir siempre en una misma dirección.
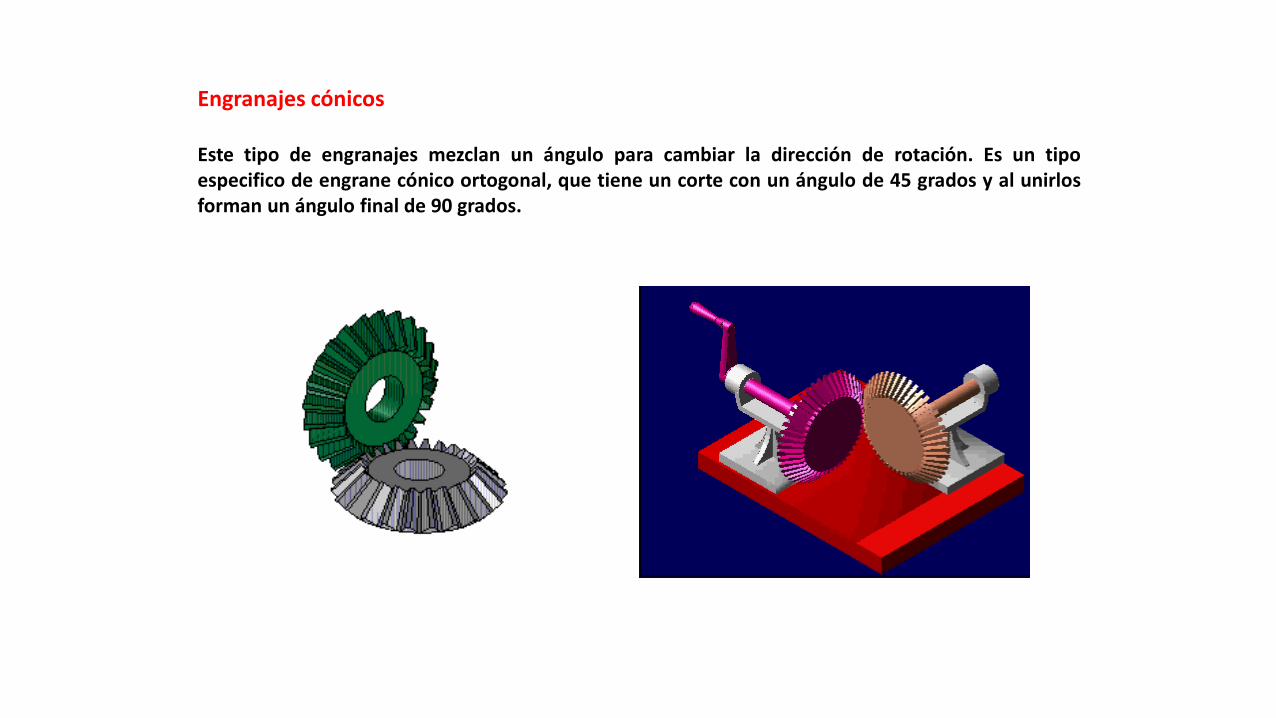
Engranajes cónicos
Este tipo de engranajes mezclan un ángulo para cambiar la dirección de rotación. Es un tipoespecifico de engrane cónico ortogonal, que tiene un corte con un ángulo de 45 grados y al unirlosforman un ángulo final de 90 grados.
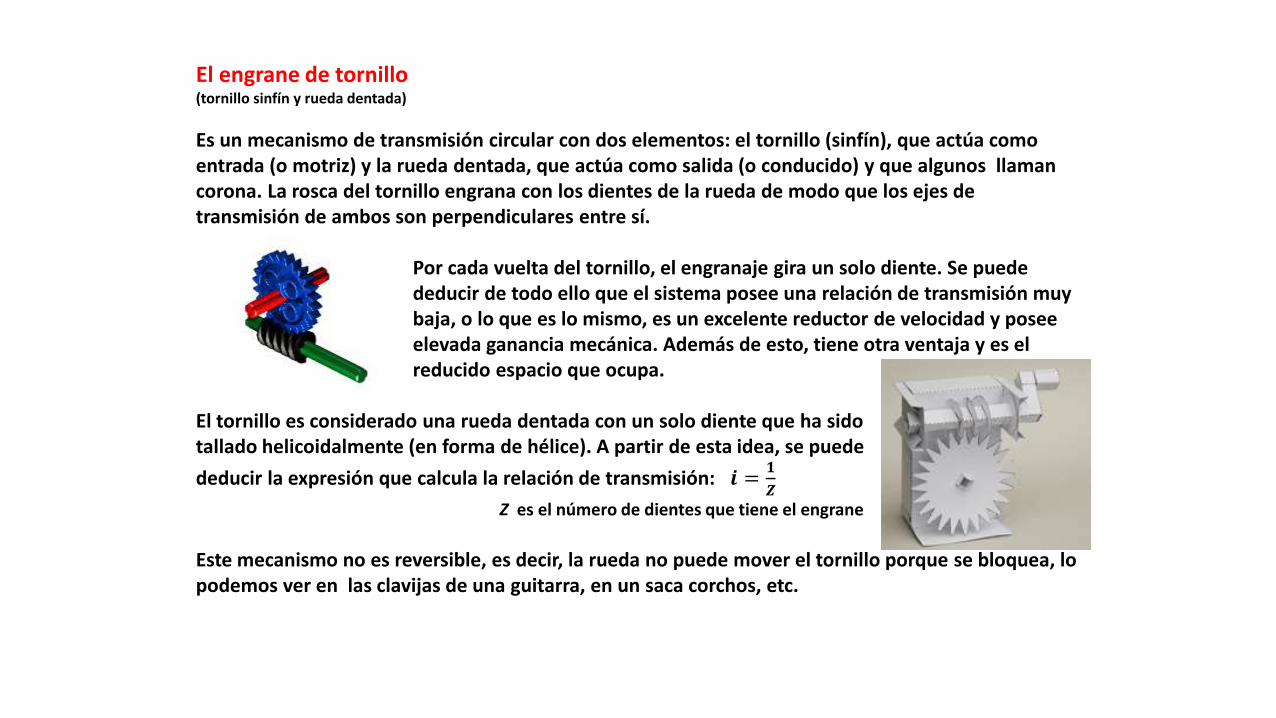
El engrane de tornillo (tornillo sinfín y rueda dentada)
Es un mecanismo de transmisión circular con dos elementos: el tornillo (sinfín), que actúa como entrada (o motriz) y la rueda dentada, que actúa como salida (o conducido) y que algunos llaman corona. La rosca del tornillo engrana con los dientes de la rueda de modo que los ejes de transmisión de ambos son perpendiculares entre sí.
Por cada vuelta del tornillo, el engranaje gira un solo diente. Se puede deducir de todo ello que el sistema posee una relación de transmisión muybaja, o lo que es lo mismo, es un excelente reductor de velocidad y posee elevada ganancia mecánica. Además de esto, tiene otra ventaja y es el reducido espacio que ocupa.
El tornillo es considerado una rueda dentada con un solo diente que ha sido tallado helicoidalmente (en forma de hélice). A partir de esta idea, se puede
deducir la expresión que calcula la relación de transmisión: 𝒊 =𝟏
𝒁
Z es el número de dientes que tiene el engrane
Este mecanismo no es reversible, es decir, la rueda no puede mover el tornillo porque se bloquea, lo podemos ver en las clavijas de una guitarra, en un saca corchos, etc.
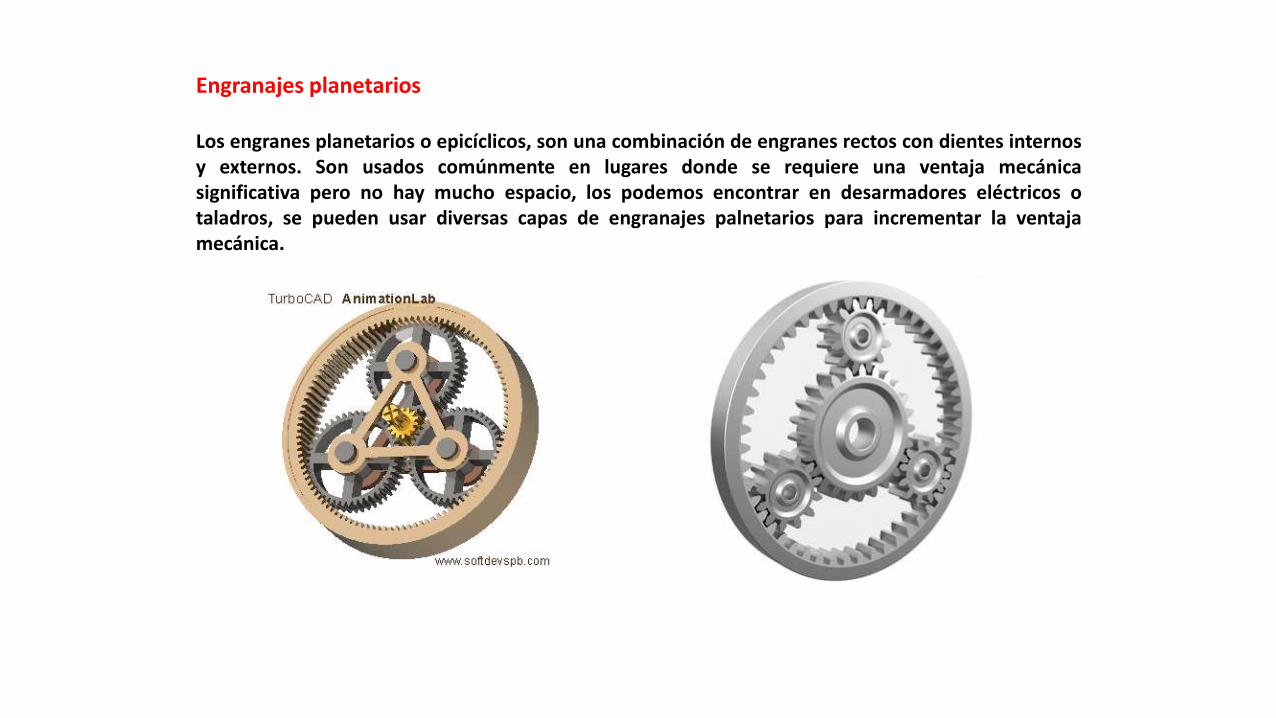
Engranajes planetarios
Los engranes planetarios o epicíclicos, son una combinación de engranes rectos con dientes internosy externos. Son usados comúnmente en lugares donde se requiere una ventaja mecánicasignificativa pero no hay mucho espacio, los podemos encontrar en desarmadores eléctricos otaladros, se pueden usar diversas capas de engranajes palnetarios para incrementar la ventajamecánica.
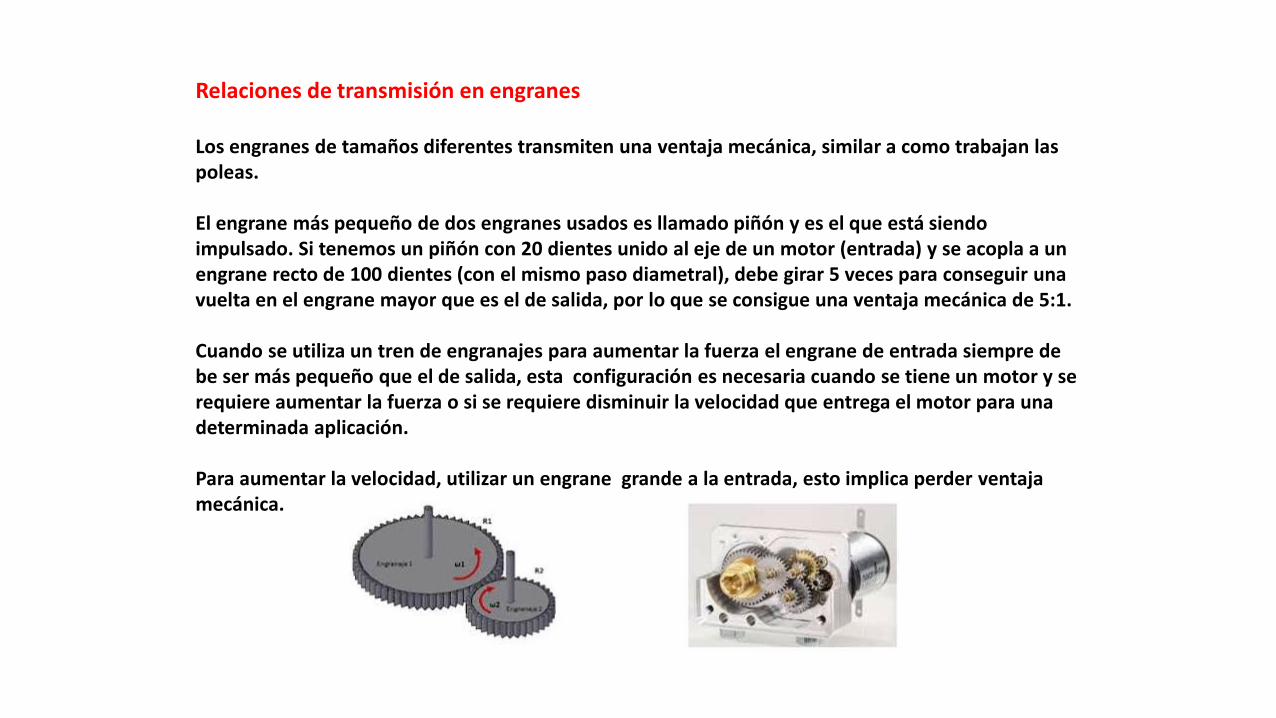
Relaciones de transmisión en engranes
Los engranes de tamaños diferentes transmiten una ventaja mecánica, similar a como trabajan las poleas.
El engrane más pequeño de dos engranes usados es llamado piñón y es el que está siendo impulsado. Si tenemos un piñón con 20 dientes unido al eje de un motor (entrada) y se acopla a un engrane recto de 100 dientes (con el mismo paso diametral), debe girar 5 veces para conseguir una vuelta en el engrane mayor que es el de salida, por lo que se consigue una ventaja mecánica de 5:1.
Cuando se utiliza un tren de engranajes para aumentar la fuerza el engrane de entrada siempre de be ser más pequeño que el de salida, esta configuración es necesaria cuando se tiene un motor y se requiere aumentar la fuerza o si se requiere disminuir la velocidad que entrega el motor para una determinada aplicación.
Para aumentar la velocidad, utilizar un engrane grande a la entrada, esto implica perder ventaja mecánica.
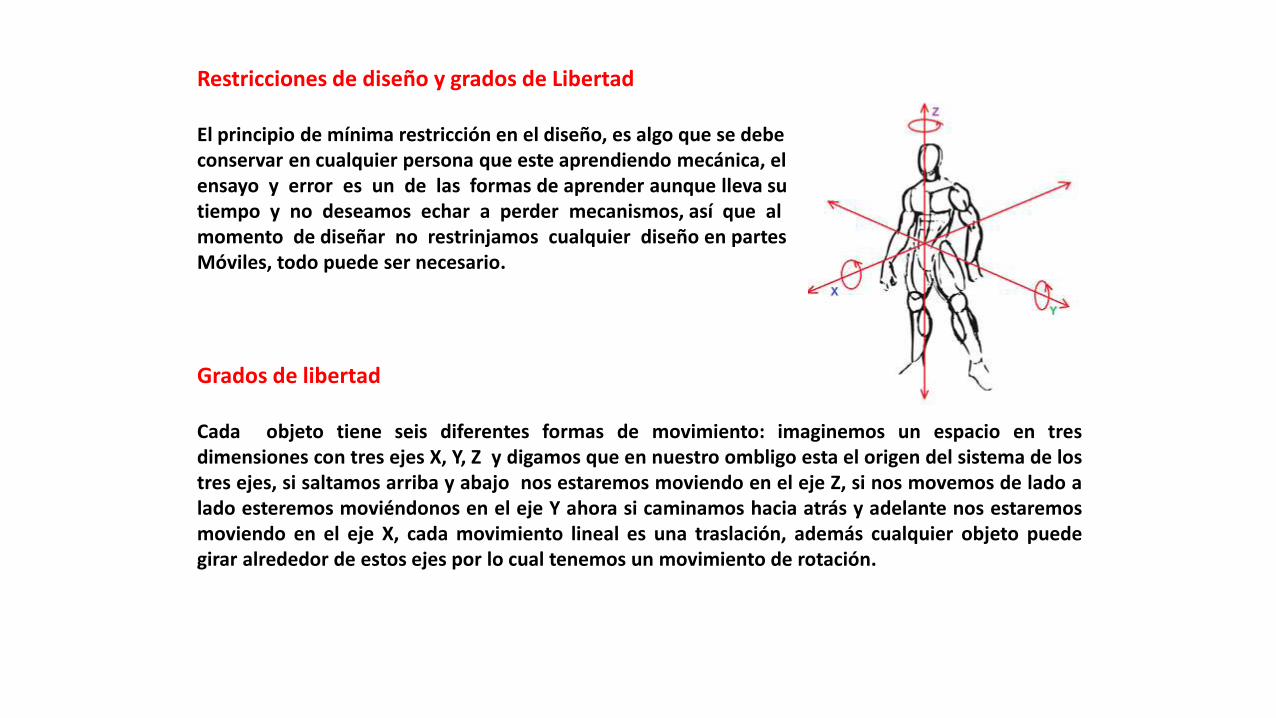
Restricciones de diseño y grados de Libertad
El principio de mínima restricción en el diseño, es algo que se debeconservar en cualquier persona que este aprendiendo mecánica, elensayo y error es un de las formas de aprender aunque lleva sutiempo y no deseamos echar a perder mecanismos, así que almomento de diseñar no restrinjamos cualquier diseño en partesMóviles, todo puede ser necesario.
Grados de libertad
Cada objeto tiene seis diferentes formas de movimiento: imaginemos un espacio en tresdimensiones con tres ejes X, Y, Z y digamos que en nuestro ombligo esta el origen del sistema de lostres ejes, si saltamos arriba y abajo nos estaremos moviendo en el eje Z, si nos movemos de lado alado esteremos moviéndonos en el eje Y ahora si caminamos hacia atrás y adelante nos estaremosmoviendo en el eje X, cada movimiento lineal es una traslación, además cualquier objeto puedegirar alrededor de estos ejes por lo cual tenemos un movimiento de rotación.
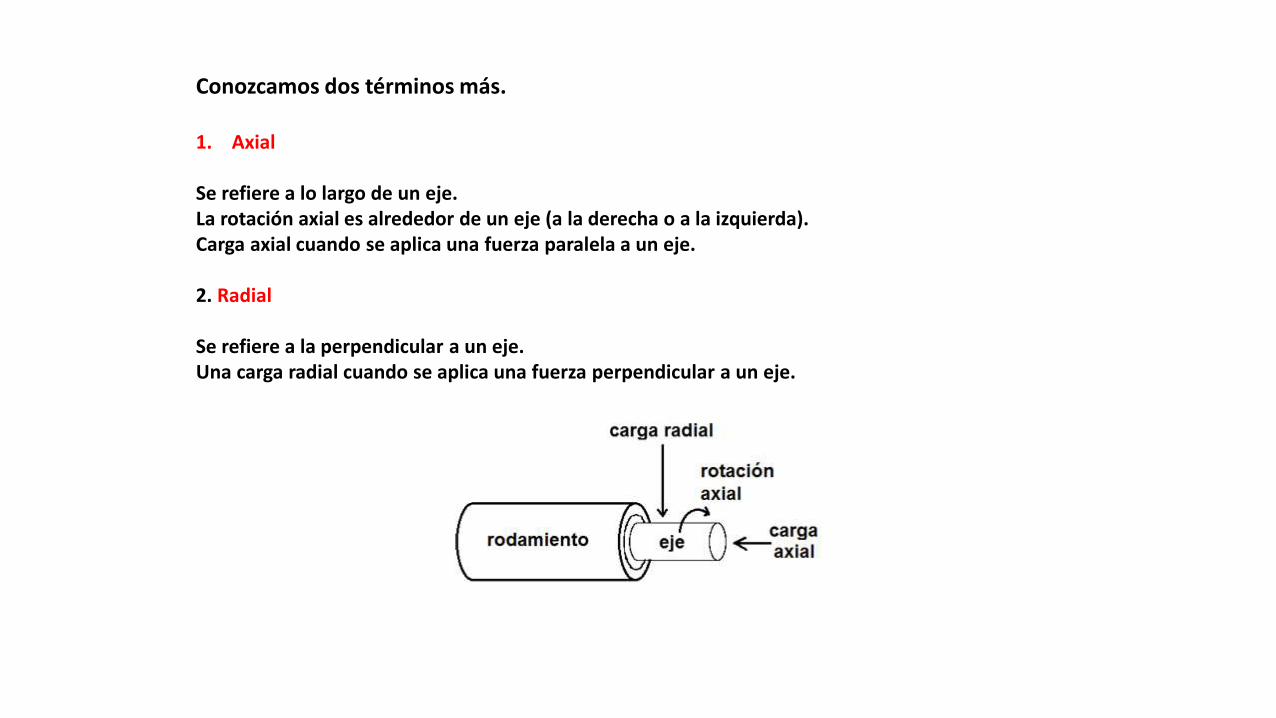
Conozcamos dos términos más.
1. Axial
Se refiere a lo largo de un eje. La rotación axial es alrededor de un eje (a la derecha o a la izquierda).Carga axial cuando se aplica una fuerza paralela a un eje.
2. Radial
Se refiere a la perpendicular a un eje. Una carga radial cuando se aplica una fuerza perpendicular a un eje.

Levas
Es el operador mecánico basado en piezas planas con perfil curvo que calzan con un seguidor, al quele imprimen movimiento. El movimiento de la leva, usualmente rotatorio se transforma enoscilación, traslación o ambos, del seguidor. Debido a las distintas geometrías de las levas y al grannúmero de combinaciones de leva y seguidor, la leva es un elemento muy versátil.
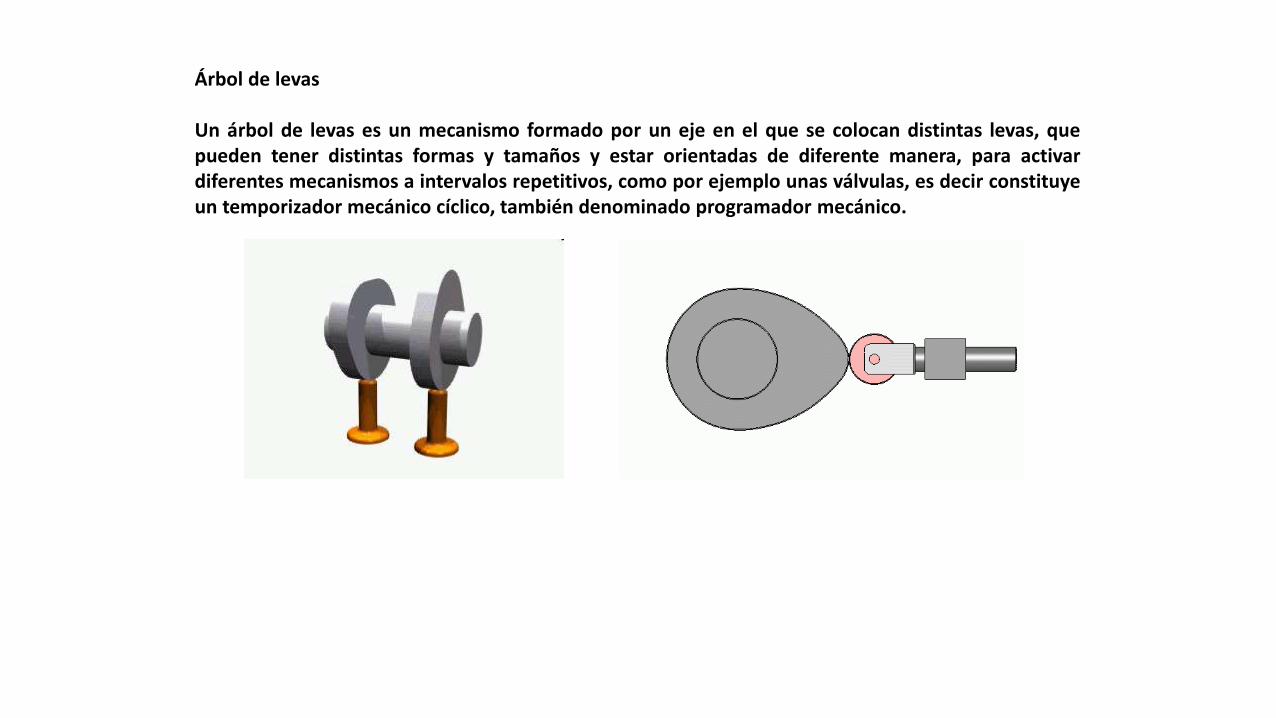
Árbol de levas
Un árbol de levas es un mecanismo formado por un eje en el que se colocan distintas levas, quepueden tener distintas formas y tamaños y estar orientadas de diferente manera, para activardiferentes mecanismos a intervalos repetitivos, como por ejemplo unas válvulas, es decir constituyeun temporizador mecánico cíclico, también denominado programador mecánico.
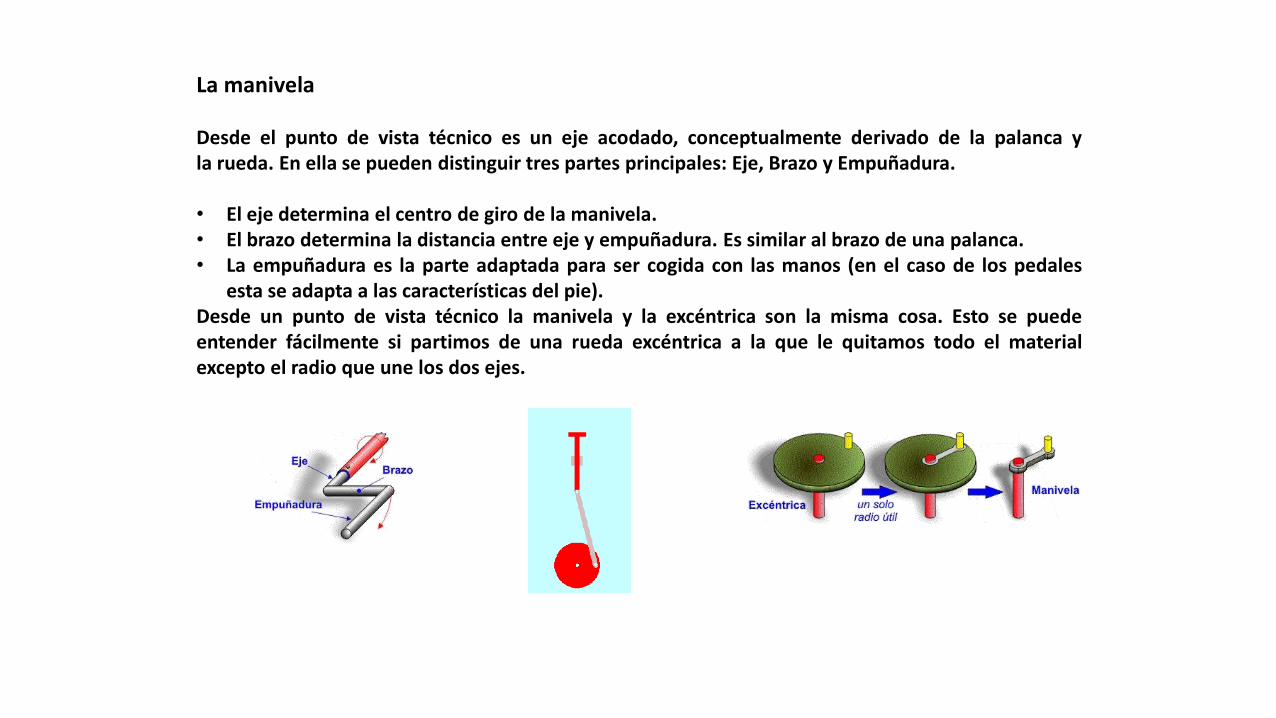
La manivela
Desde el punto de vista técnico es un eje acodado, conceptualmente derivado de la palanca yla rueda. En ella se pueden distinguir tres partes principales: Eje, Brazo y Empuñadura.
• El eje determina el centro de giro de la manivela.• El brazo determina la distancia entre eje y empuñadura. Es similar al brazo de una palanca.• La empuñadura es la parte adaptada para ser cogida con las manos (en el caso de los pedales
esta se adapta a las características del pie).Desde un punto de vista técnico la manivela y la excéntrica son la misma cosa. Esto se puedeentender fácilmente si partimos de una rueda excéntrica a la que le quitamos todo el materialexcepto el radio que une los dos ejes.
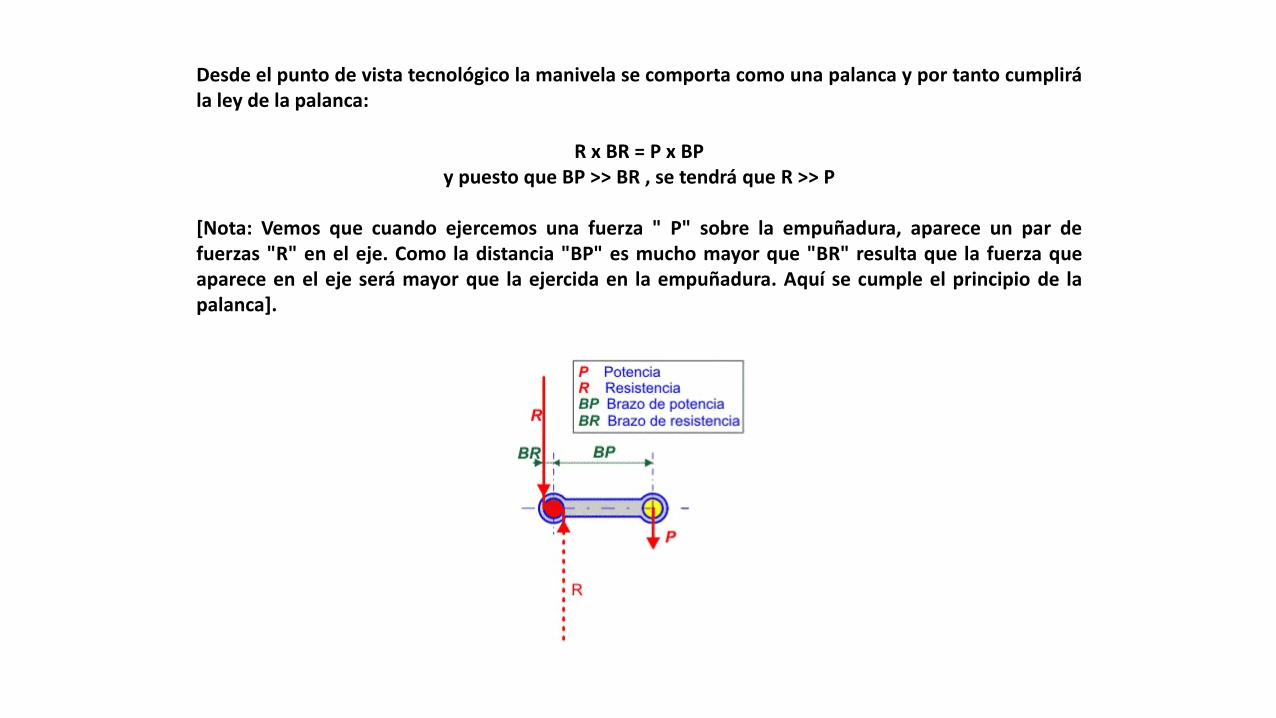
Desde el punto de vista tecnológico la manivela se comporta como una palanca y por tanto cumplirála ley de la palanca:
R x BR = P x BPy puesto que BP >> BR , se tendrá que R >> P
[Nota: Vemos que cuando ejercemos una fuerza " P" sobre la empuñadura, aparece un par defuerzas "R" en el eje. Como la distancia "BP" es mucho mayor que "BR" resulta que la fuerza queaparece en el eje será mayor que la ejercida en la empuñadura. Aquí se cumple el principio de lapalanca].
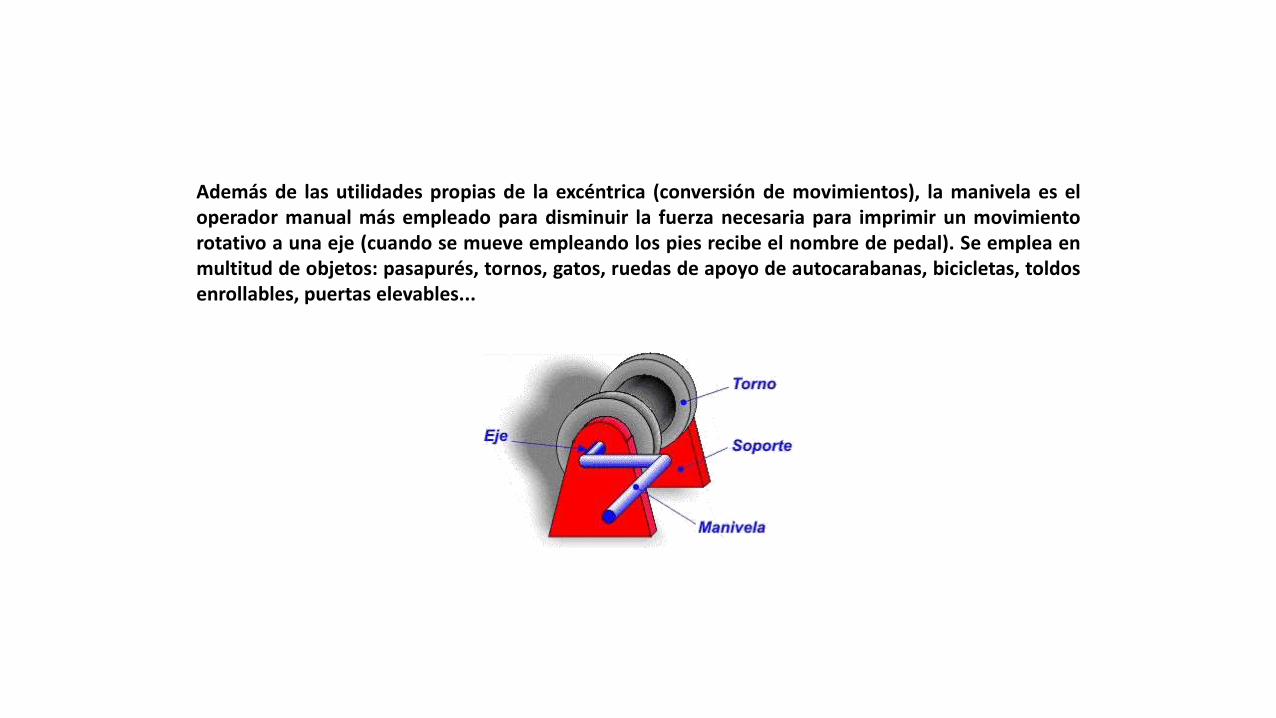
Además de las utilidades propias de la excéntrica (conversión de movimientos), la manivela es eloperador manual más empleado para disminuir la fuerza necesaria para imprimir un movimientorotativo a una eje (cuando se mueve empleando los pies recibe el nombre de pedal). Se emplea enmultitud de objetos: pasapurés, tornos, gatos, ruedas de apoyo de autocarabanas, bicicletas, toldosenrollables, puertas elevables...
La excéntrica
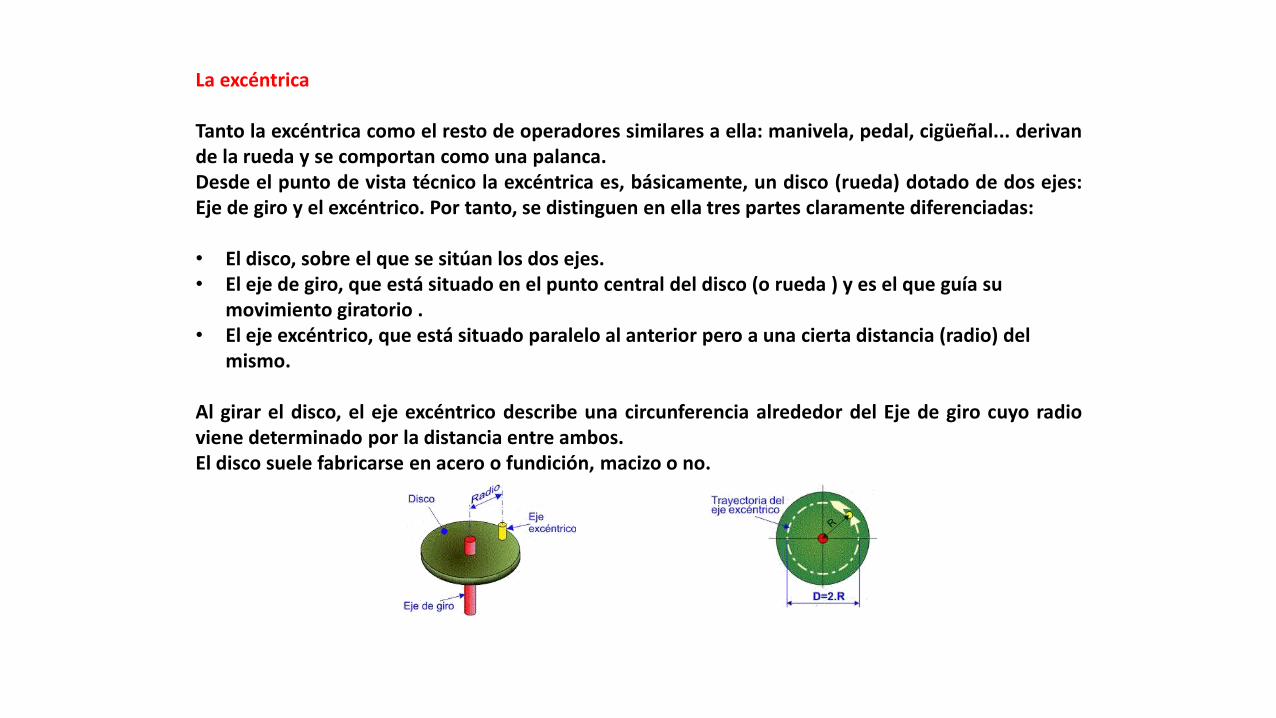
Tanto la excéntrica como el resto de operadores similares a ella: manivela, pedal, cigüeñal... derivande la rueda y se comportan como una palanca.Desde el punto de vista técnico la excéntrica es, básicamente, un disco (rueda) dotado de dos ejes:Eje de giro y el excéntrico. Por tanto, se distinguen en ella tres partes claramente diferenciadas:
• El disco, sobre el que se sitúan los dos ejes.• El eje de giro, que está situado en el punto central del disco (o rueda ) y es el que guía su
movimiento giratorio .• El eje excéntrico, que está situado paralelo al anterior pero a una cierta distancia (radio) del
mismo.
Al girar el disco, el eje excéntrico describe una circunferencia alrededor del Eje de giro cuyo radioviene determinado por la distancia entre ambos.El disco suele fabricarse en acero o fundición, macizo o no.
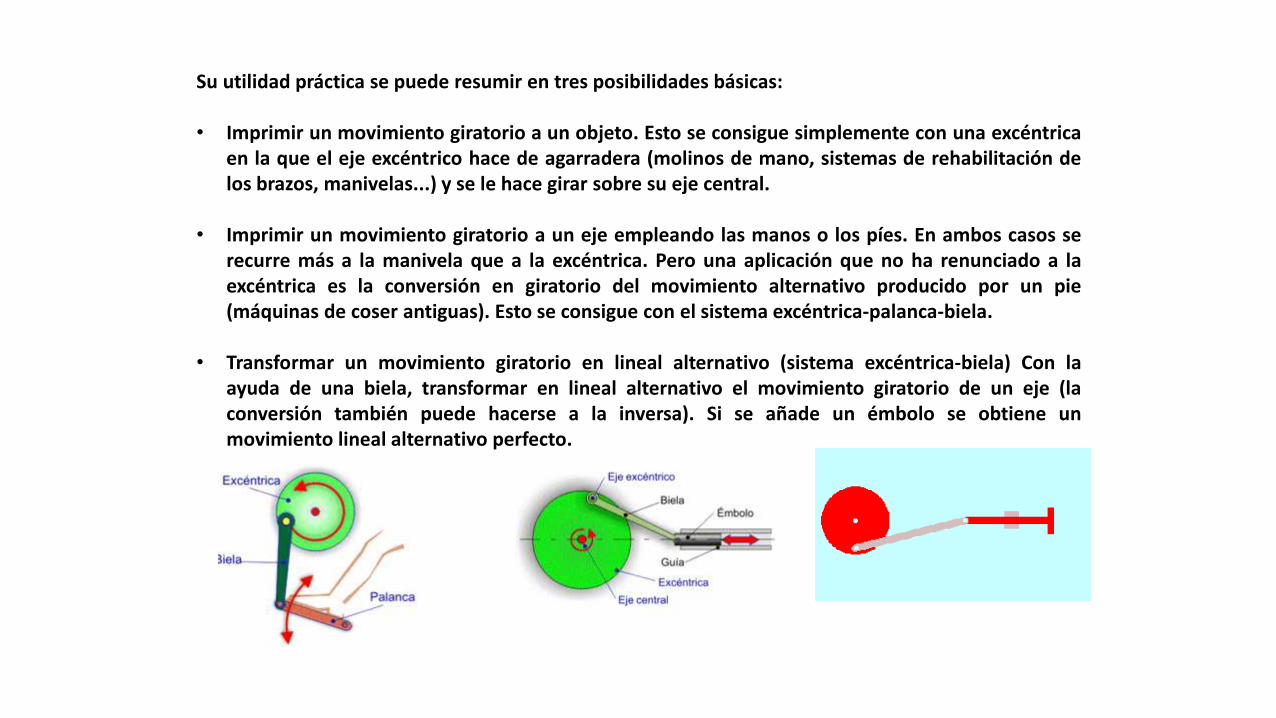
Su utilidad práctica se puede resumir en tres posibilidades básicas:
• Imprimir un movimiento giratorio a un objeto. Esto se consigue simplemente con una excéntricaen la que el eje excéntrico hace de agarradera (molinos de mano, sistemas de rehabilitación delos brazos, manivelas...) y se le hace girar sobre su eje central.
• Imprimir un movimiento giratorio a un eje empleando las manos o los píes. En ambos casos serecurre más a la manivela que a la excéntrica. Pero una aplicación que no ha renunciado a laexcéntrica es la conversión en giratorio del movimiento alternativo producido por un pie(máquinas de coser antiguas). Esto se consigue con el sistema excéntrica-palanca-biela.
• Transformar un movimiento giratorio en lineal alternativo (sistema excéntrica-biela) Con laayuda de una biela, transformar en lineal alternativo el movimiento giratorio de un eje (laconversión también puede hacerse a la inversa). Si se añade un émbolo se obtiene unmovimiento lineal alternativo perfecto.
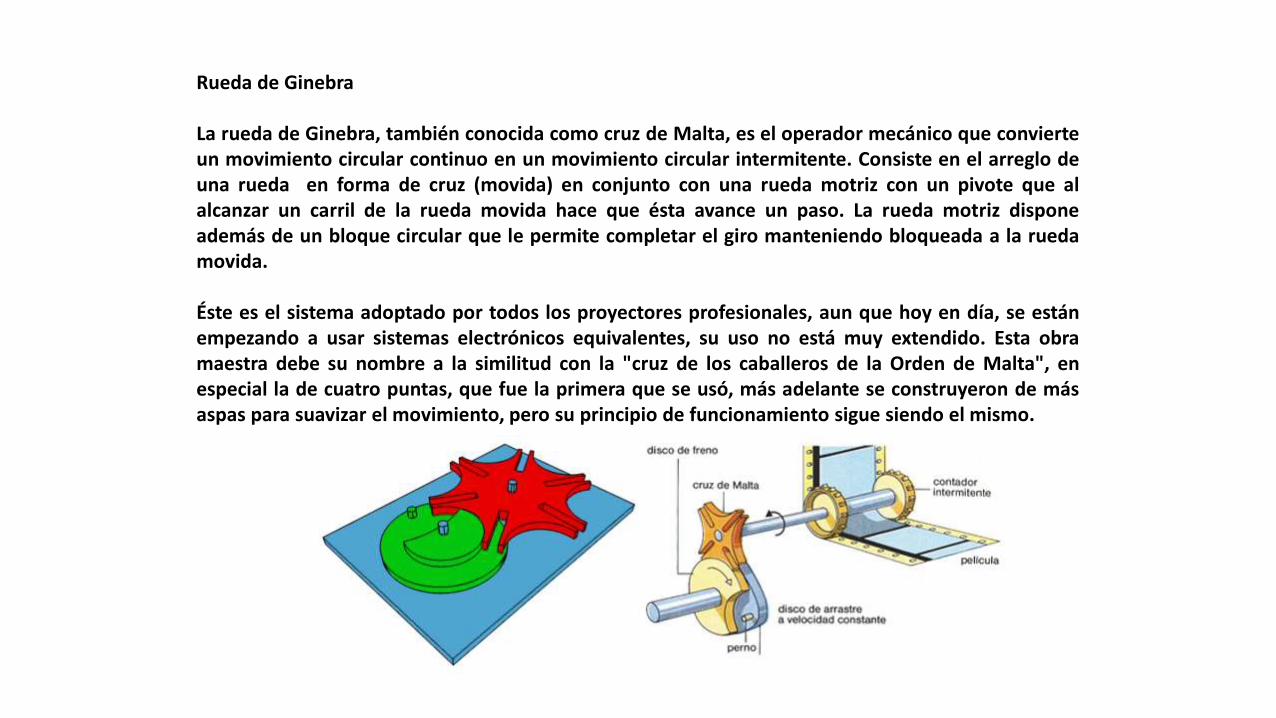
Rueda de Ginebra
La rueda de Ginebra, también conocida como cruz de Malta, es el operador mecánico que convierteun movimiento circular continuo en un movimiento circular intermitente. Consiste en el arreglo deuna rueda en forma de cruz (movida) en conjunto con una rueda motriz con un pivote que alalcanzar un carril de la rueda movida hace que ésta avance un paso. La rueda motriz disponeademás de un bloque circular que le permite completar el giro manteniendo bloqueada a la ruedamovida.
Éste es el sistema adoptado por todos los proyectores profesionales, aun que hoy en día, se estánempezando a usar sistemas electrónicos equivalentes, su uso no está muy extendido. Esta obramaestra debe su nombre a la similitud con la "cruz de los caballeros de la Orden de Malta", enespecial la de cuatro puntas, que fue la primera que se usó, más adelante se construyeron de másaspas para suavizar el movimiento, pero su principio de funcionamiento sigue siendo el mismo.
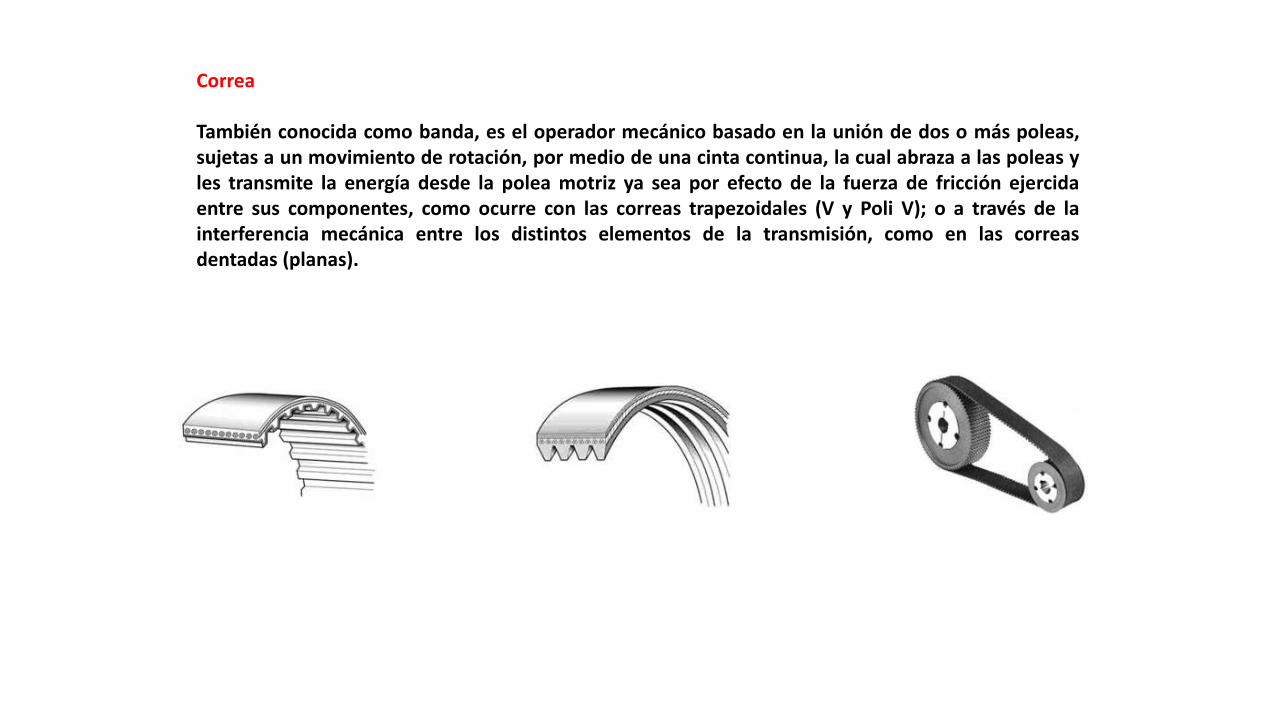
Correa
También conocida como banda, es el operador mecánico basado en la unión de dos o más poleas,sujetas a un movimiento de rotación, por medio de una cinta continua, la cual abraza a las poleas yles transmite la energía desde la polea motriz ya sea por efecto de la fuerza de fricción ejercidaentre sus componentes, como ocurre con las correas trapezoidales (V y Poli V); o a través de lainterferencia mecánica entre los distintos elementos de la transmisión, como en las correasdentadas (planas).
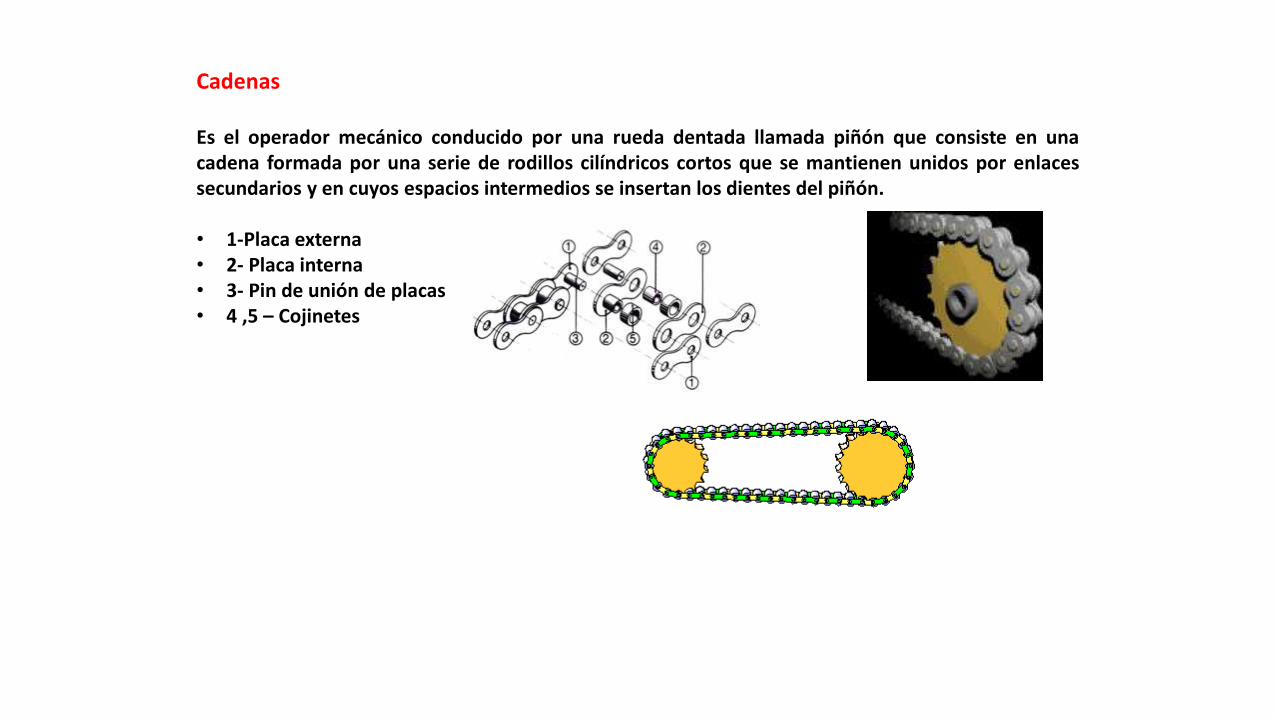
Cadenas
Es el operador mecánico conducido por una rueda dentada llamada piñón que consiste en unacadena formada por una serie de rodillos cilíndricos cortos que se mantienen unidos por enlacessecundarios y en cuyos espacios intermedios se insertan los dientes del piñón.
• 1-Placa externa• 2- Placa interna• 3- Pin de unión de placas• 4 ,5 – Cojinetes

Acopladores y rodamientos
Un acoplador es un dispositivo usado para conectar dos ejes juntos en sus extremos con el fin detransmitir energía. Los acoplamientos normalmente no permiten la desconexión entre los ejesdurante la operación, sin embargo hay algunos acopladores con limitación de par que puedendeslizarse o desconectarse cuando se supera un límite de esfuerzo de torsión.
Un rodamiento, rolinera, balinera o balero ; es un elemento mecánico que reduce la fricción entreun eje y las piezas conectadas a éste por medio de un arreglo de balines que median entre doscojinetes, para servir de apoyo y facilitar su desplazamiento, existen lineales y circulares.
Todas las cosas que se mueven necesitan una fuente de energía. Esta energía puede ser tan simple como utilizar la fuerza de la gravedad para crear movimiento, o tan complejo como el motor de combustión interna en un coche de gasolina. Una persona puede también ser fuente de alimentación al pedalear en una bicicleta. Nuestros cuerpos convierten la energía química de los alimentos que comemos en energía mecánica para que podamos caminar, correr y saltar. Los motores convierten la energía eléctrica en energía mecánica para que podamos hacer que las cosas se muevan y giren.
Veamos cómo la potencia, el trabajo y la energía están relacionados, identifiquemos las fuentes de potencia y cómo trabajan.
Energía mecánica
La energía mecánica es la suma de la energía potencial y cinética de un objeto. La energía potencial es cómo se almacena la cantidad de energía en un objeto en reposo. La energía cinética es la energía que un objeto tiene debido a su movimiento.
Por ejemplo, si una esfera se detiene en lo alto de una colina, su energía potencial es igual a su peso multiplicado por la altura de la colina.
Energía potencial = Peso x Altura
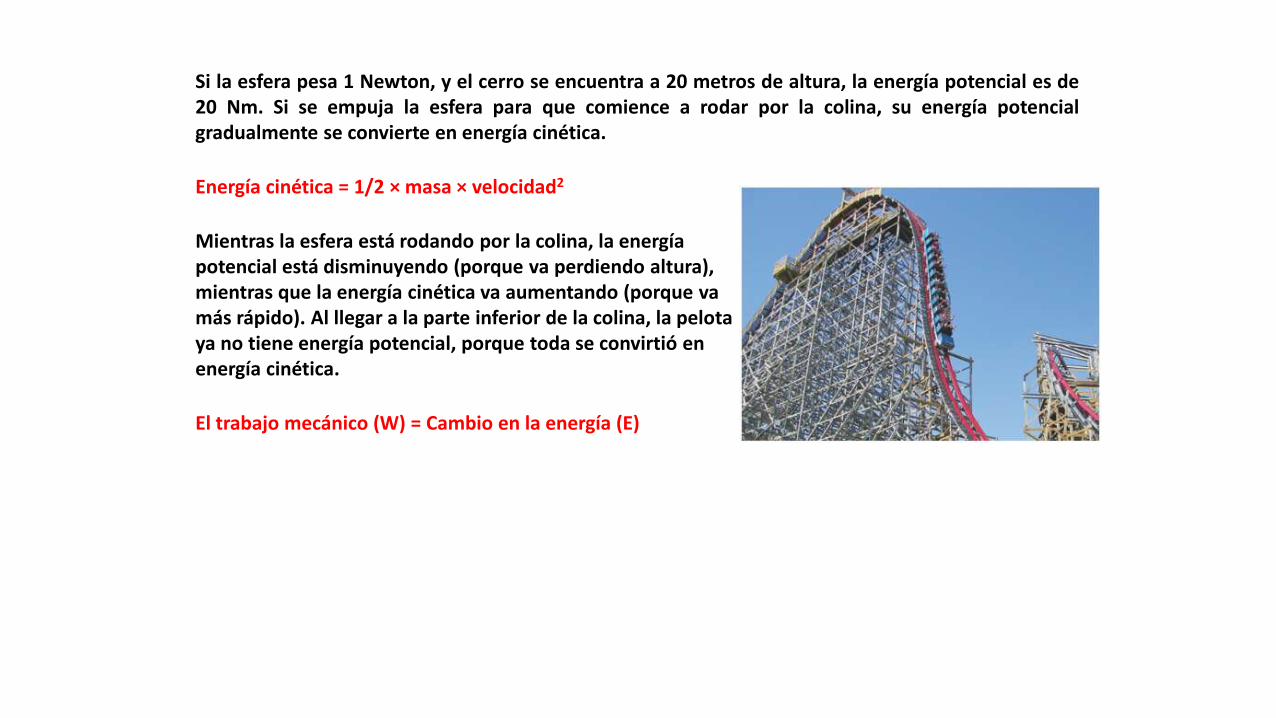
Si la esfera pesa 1 Newton, y el cerro se encuentra a 20 metros de altura, la energía potencial es de20 Nm. Si se empuja la esfera para que comience a rodar por la colina, su energía potencialgradualmente se convierte en energía cinética.
Energía cinética = 1/2 × masa × velocidad2
Mientras la esfera está rodando por la colina, la energíapotencial está disminuyendo (porque va perdiendo altura),mientras que la energía cinética va aumentando (porque vamás rápido). Al llegar a la parte inferior de la colina, la pelotaya no tiene energía potencial, porque toda se convirtió enenergía cinética.
El trabajo mecánico (W) = Cambio en la energía (E)
La energía es la capacidad para hacer un trabajo. En el caso de una montaña rusa, el mecanismo dearrastre de los coches los llevó de una energía potencial cero a una gran cantidad de energíapotencial.
Supongamos que los coches de la montaña rusa pesan 100 Newtons todos juntos, y que sonarrastrados a una altura de 60 metros, al cambiar su elevación, el mecanismo de arrastre hizo 100 N× 60 m = 600 Nm de trabajo
Al trabajo lo podemos definir también como la fuerza multiplicada por la distancia:
Trabajo (W) = Fuerza (F) x Distancia (d) = Energía (E)
La energía potencial y el trabajo mecánico son dos formas de pensar en la misma situación, lapotencia mecánica es la razón de trabajo realizado ( o energía usada):
Potencia (P) = Trabajo (W) / tiempo(t) = Energía E / tiempo (t)
La potencia mecánica se mide en caballos de potencia (hp). Esta unidad viene de los tiempos en que las máquinas de vapor reemplazaron a los caballos y es igual a la potencia necesaria para levantar 550 libras por 1 pie en 1 segundo, la capacidad de trabajo estimada de un caballo. Un caballo de fuerza es también igual a aproximadamente 746 watts. Es frecuente encontrar los motores y las maquinas en caballos de potencia.
Hasta aquí hemos hablado del trabajo y la potencia en líneas rectas, pero que sucede en un motor que gira? Anteriormente se habló de la velocidad de rotación sabemos que el trabajo tiene unidades de fuerza por distancia y que los motores se piden por su torque o par, pues bien el par es el trabajo realizado en un círculo, así:
Potencia (P) = Par (T) x velocidad de rotación (ω)Potencia eléctrica
Seguramente si estamos utilizando mecanismos tengamos la necesidad de utilizar energía eléctrica, a menos que pensemos utilizar el viento o la energía humana para generar un trabajo, bien lo importante de esto es que al igual que lo que ocurre con el carro en la montaña rusa para hacerlo descender con la energía eléctrica ocurre algo parecido se requiere una diferencia de potencial para poder mover los electrones a través de un conductor, siempre de mayor potencial a menor potencial, es decir, de positivo a negativo.
Nuestro cuerpos con la fricción se cargan eléctricamente, ya sea positiva o negativamente, por lo que en un cierto momento cuando tocamos un cuerpo con una carga diferente nos descargamos o cargamos más si nuestro potencial es menor que la de otro cuerpo, en cualquier caso se genera una pequeña chispa.
La diferencia relativa entre dos puntos de alta y baja energía se denomina tensión y se mide el volts (V). Las baterías o pilas que comúnmente utilizamos traen marcada la tensión en su etiqueta, así, podemos encontrar de 1.5 V, 3.6 V, 9 V, 12 V, etc.
La corriente es la cantidad de energía eléctrica o electrones pasando a través de un punto en un circuito, es medida en amperes (A). Algunas baterías o pilas sobre todo las recargables traen indicada en su etiqueta la cantidad de corriente que entregan por hora por ejemplo 1000 mAh, 2200 mAh, 6 Ah, etc.
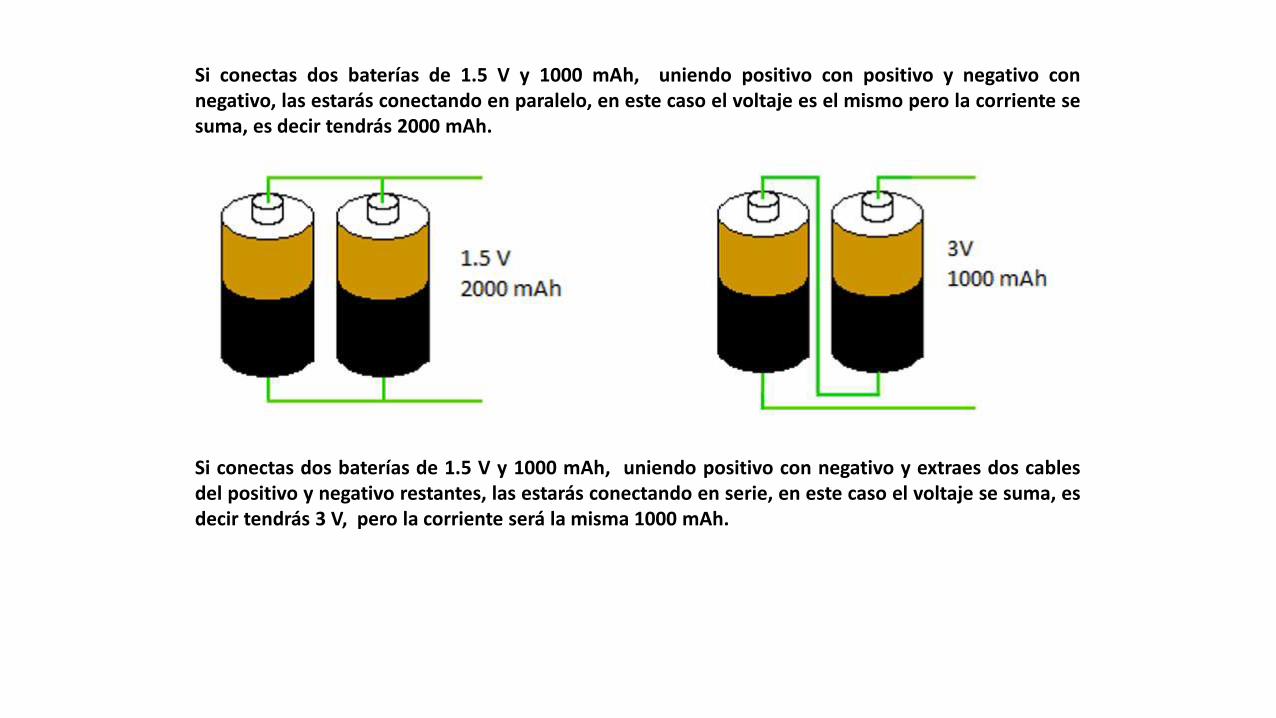
Si conectas dos baterías de 1.5 V y 1000 mAh, uniendo positivo con positivo y negativo connegativo, las estarás conectando en paralelo, en este caso el voltaje es el mismo pero la corriente sesuma, es decir tendrás 2000 mAh.
Si conectas dos baterías de 1.5 V y 1000 mAh, uniendo positivo con negativo y extraes dos cablesdel positivo y negativo restantes, las estarás conectando en serie, en este caso el voltaje se suma, esdecir tendrás 3 V, pero la corriente será la misma 1000 mAh.
La corriente directa DC es un flujo de electricidad constante como la suministrada por las baterías opilas. Se puede convertir en corriente alterna por medio de circuitos electrónicos.
La corriente alterna es un flujo de electricidad que varia en el tiempo, generalmente tiene unavariación de 0 a 120 V y se repite 60 veces por segundo. Es la que obtenemos de los contactos denuestras casas, esta corriente se puede convertir en corriente directa DC con la ayuda deeliminadores.
La resistencia, es la carga que se conecta a una batería o directamente del contacto en la casa, semide en Ohms.
Existe una relación entre el voltaje, la corriente y la resistencia expresada con la Ley de Ohm comosigue:
Voltaje (V) = Corriente (I) x Resistencia (R)
La potencia eléctrica (P), es medida en watts (W), es la combinación de la corriente y el voltaje.
Potencia (P) = Corriente (I) x Voltaje (V)
Recordemos que la energía no se crea ni se destruye sólo se transforma. La transducción es laconversión de una forma de energía en otra. Un transductor es un elemento que se encarga deconvertir la forma de la energía en otras, como ejemplo podemos ver que un motor es untransductor que convierte energía eléctrica en energía cinética o movimiento. Una lámpara es otrotransductor que cambia la energía eléctrica en luz y calor. Nuestros propios cuerpos sontransductores que convierten la energía química en energía mecánica.
Para los proyectos que ustedes realicen necesitarán utilizar, fuentes de alimentación de corrientedirecta que pueden estar o no conectadas a las tomas de corriente alterna, eso depende de laindependencia que se desee en el proyecto, para usar baterías se puede elegir entre las de zinc,alcalinas, nickel- Metal Hidruro, nickel-Cadmio, Plomo-Acido, Litio, Iones de Litio y Polímeros deLitio. Si no se requiere independencia se pueden usar fuentes de computadora, convertidores devoltaje, así como fuentes de energía alternativa (capacitores de almacenamiento de energía, celdaso paneles solares, agua, viento y otros fluidos, bio-baterias creadas por la energía de la comida(papas, jitomates, limones, guayabas, naranjas, cebollas que utilizan electrodos generalmente decobre y zinc
Resortes y energía almacenada en un elástico
Un resorte es un dispositivo de almacenamiento de energía, ya que un resorte tiene la capacidad dehacer trabajo, los resortes presentan diferentes formas y tamaños, los resortes de compresión sonlos más comunes.
Resortes de compresión
Los resortes de compresión son helicoidales abiertos ofreciendo resistencia para una fuerzacompresiva aplicada axialmente. Estos resortes son generalmente de diseño cilíndricos. Los resortesde compresión se utilizan para resistir la fuerza y/o para almacenar energía, dependiendo del uso.Se utilizan en auto-partes, lapiceras de pluma, elevadores, accesorios eléctricos, paraguas, artículosde la casa, válvulas, etc.
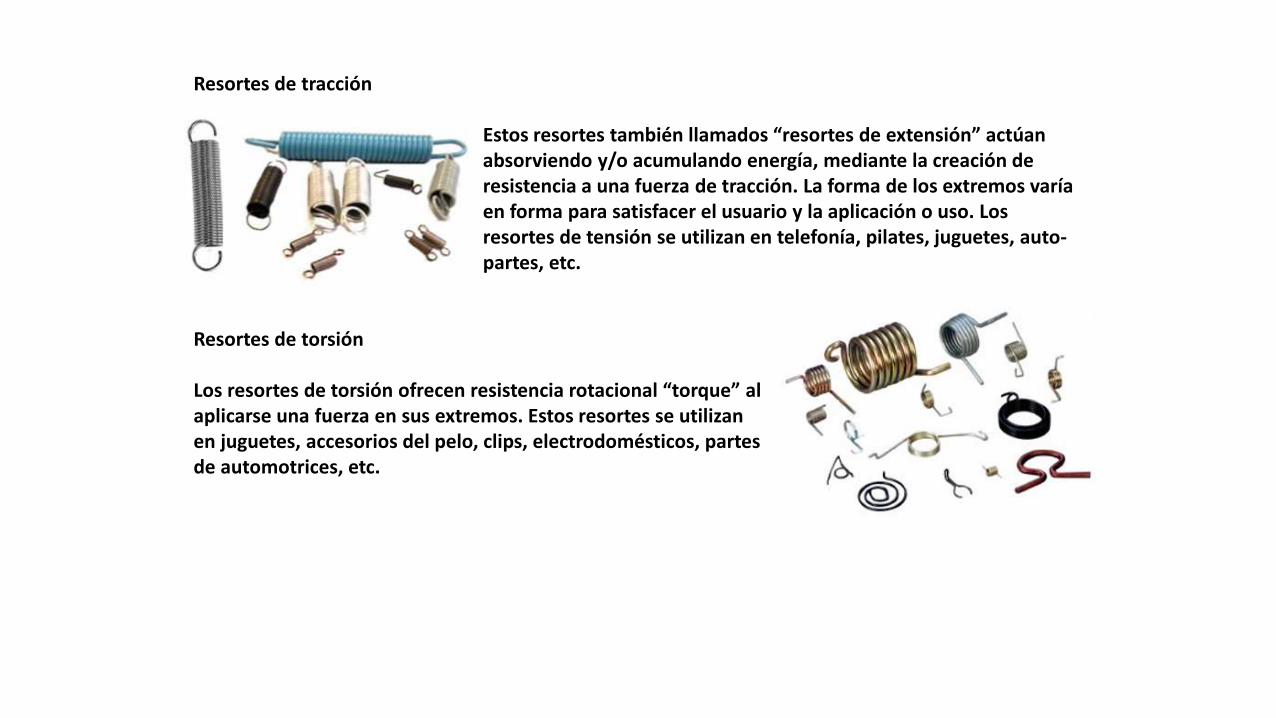
Resortes de tracción
Estos resortes también llamados “resortes de extensión” actúan absorviendo y/o acumulando energía, mediante la creación de resistencia a una fuerza de tracción. La forma de los extremos varíaen forma para satisfacer el usuario y la aplicación o uso. Los resortes de tensión se utilizan en telefonía, pilates, juguetes, auto-partes, etc.
Resortes de torsión
Los resortes de torsión ofrecen resistencia rotacional “torque” al aplicarse una fuerza en sus extremos. Estos resortes se utilizan en juguetes, accesorios del pelo, clips, electrodomésticos, partesde automotrices, etc.
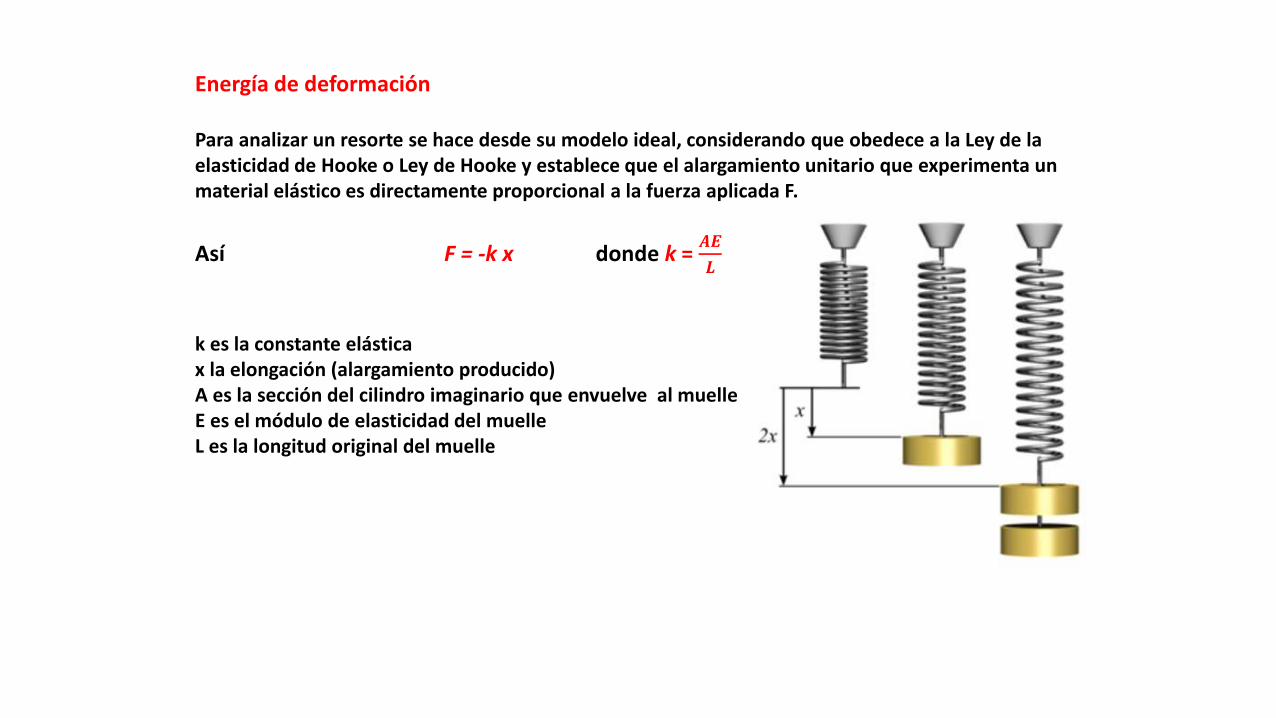
Energía de deformación
Para analizar un resorte se hace desde su modelo ideal, considerando que obedece a la Ley de la elasticidad de Hooke o Ley de Hooke y establece que el alargamiento unitario que experimenta un material elástico es directamente proporcional a la fuerza aplicada F.
Así F = -k x donde k = 𝑨𝑬
𝑳
k es la constante elásticax la elongación (alargamiento producido)A es la sección del cilindro imaginario que envuelve al muelleE es el módulo de elasticidad del muelleL es la longitud original del muelle
Videos de trabajo artístico

El componente más importante de cualquier sistema de desplazamiento es un actuador, el elemento que hace mover al sistema mecánico. Los motores son los actuadores más comunes, existen muchos tipos y se debe aprender a elegir el que más se ajuste al proyecto que estén realizando.
Ya aprendimos lo que es fuerza, par o torque y potencia, estos nos servirán para poder determinar qué tan fuerte es el actuador que deseen utilizar para una tarea especifica,veamos cómo funcionan los motores.
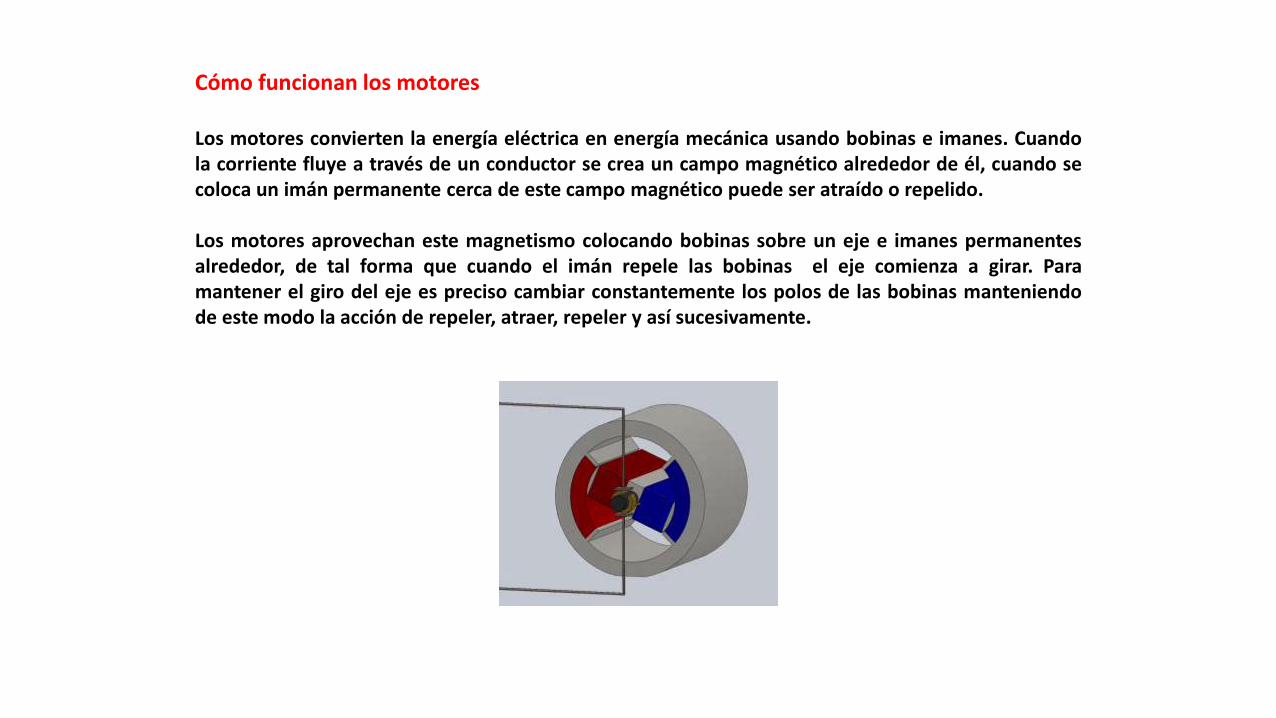
Cómo funcionan los motores
Los motores convierten la energía eléctrica en energía mecánica usando bobinas e imanes. Cuandola corriente fluye a través de un conductor se crea un campo magnético alrededor de él, cuando secoloca un imán permanente cerca de este campo magnético puede ser atraído o repelido.
Los motores aprovechan este magnetismo colocando bobinas sobre un eje e imanes permanentesalrededor, de tal forma que cuando el imán repele las bobinas el eje comienza a girar. Paramantener el giro del eje es preciso cambiar constantemente los polos de las bobinas manteniendode este modo la acción de repeler, atraer, repeler y así sucesivamente.
Motor de DC
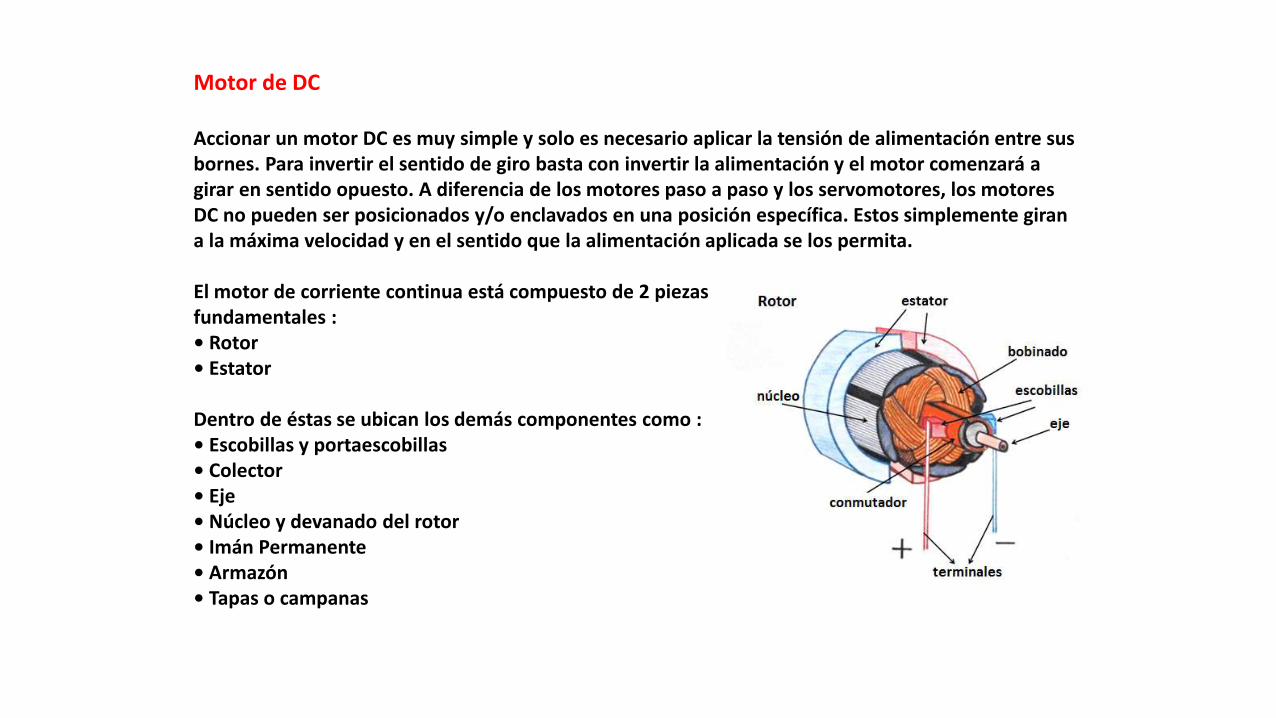
Accionar un motor DC es muy simple y solo es necesario aplicar la tensión de alimentación entre sus bornes. Para invertir el sentido de giro basta con invertir la alimentación y el motor comenzará a girar en sentido opuesto. A diferencia de los motores paso a paso y los servomotores, los motores DC no pueden ser posicionados y/o enclavados en una posición específica. Estos simplemente giran a la máxima velocidad y en el sentido que la alimentación aplicada se los permita.
El motor de corriente continua está compuesto de 2 piezasfundamentales :• Rotor• Estator
Dentro de éstas se ubican los demás componentes como :• Escobillas y portaescobillas• Colector• Eje• Núcleo y devanado del rotor• Imán Permanente• Armazón• Tapas o campanas

El motor de corriente continua (denominado también motor de corriente directa, motor CC o motorCD) es una máquina que convierte la energía eléctrica en mecánica, provocando un movimientorotatorio, gracias a la acción de un campo magnético.
El motor se compone principalmente de dos partes. El estator da soporte mecánico al aparato ycontiene los devanados principales de la máquina, conocidos también con el nombre de polos, quepueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotores generalmente de forma cilíndrica, también devanado y con núcleo, alimentado con corrientedirecta mediante escobillas fijas (conocidas también como carbones).
El motor tiene solamente dos conexiones eléctricas, así que todo lo que se necesita para hacerfuncionar motor DC es conectarlo a una fuente de energía. Para invertir la dirección, sólo hay queinvertir las conexiones a la fuente. Si se reduce la tensión, continuará funcionando en un ciertorango, pero girará más lento. Si se sube la tensión, girará más rápido.
Los motores DC normalmente necesitan entre 1, 5V y 12V. Giran a velocidades desde 1. 000 a 20.000 rpm o más.

Video de trabajo artístico
Video de trabajo artístico

Motor paso a paso
Los motores paso a paso son ideales para la construcción de mecanismos en donde se requierenmovimientos muy precisos.
La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cadapulso que se le aplique. Este paso puede variar desde 90° hasta pequeños movimientos de tan solo1.8°, es decir, que se necesitarán 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°),para completar un giro completo de 360°.
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmentelibres. Si una o más de sus bobinas está energizada, el motor estará enclavado en la posicióncorrespondiente y por el contrario quedará completamente libre si no circula corriente por ningunade sus bobinas.
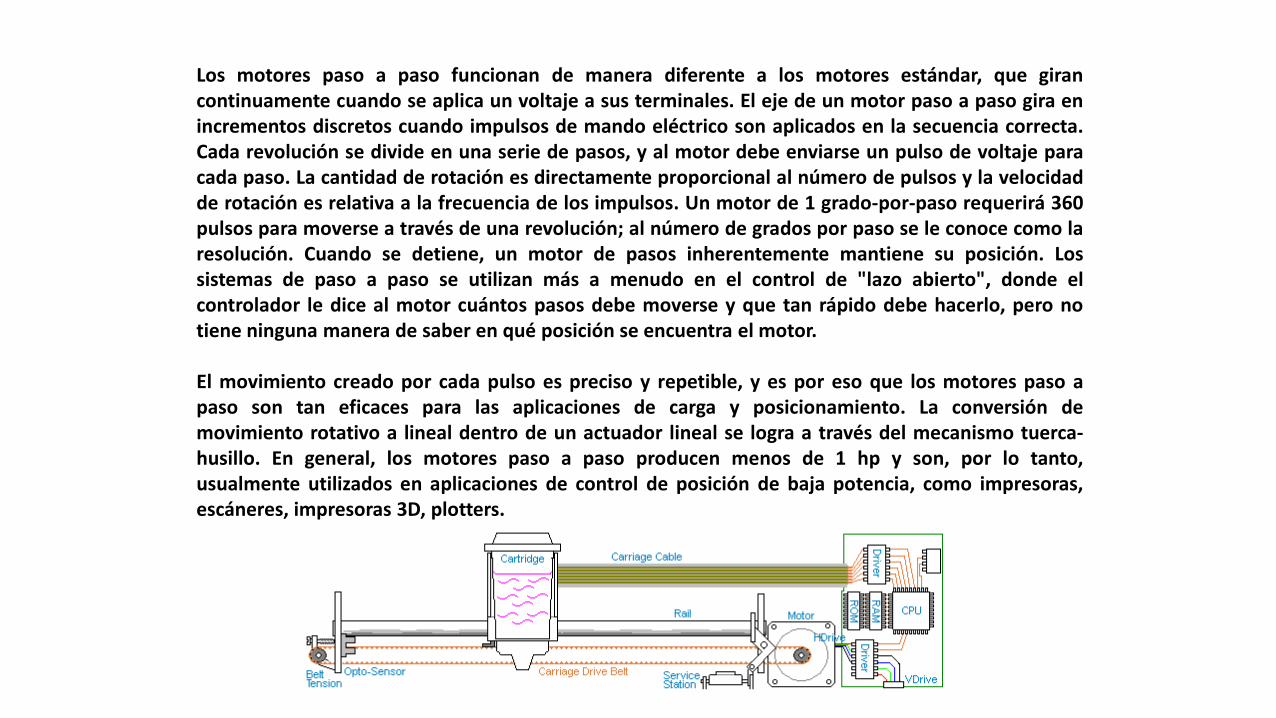
Los motores paso a paso funcionan de manera diferente a los motores estándar, que girancontinuamente cuando se aplica un voltaje a sus terminales. El eje de un motor paso a paso gira enincrementos discretos cuando impulsos de mando eléctrico son aplicados en la secuencia correcta.Cada revolución se divide en una serie de pasos, y al motor debe enviarse un pulso de voltaje paracada paso. La cantidad de rotación es directamente proporcional al número de pulsos y la velocidadde rotación es relativa a la frecuencia de los impulsos. Un motor de 1 grado-por-paso requerirá 360pulsos para moverse a través de una revolución; al número de grados por paso se le conoce como laresolución. Cuando se detiene, un motor de pasos inherentemente mantiene su posición. Lossistemas de paso a paso se utilizan más a menudo en el control de "lazo abierto", donde elcontrolador le dice al motor cuántos pasos debe moverse y que tan rápido debe hacerlo, pero notiene ninguna manera de saber en qué posición se encuentra el motor.
El movimiento creado por cada pulso es preciso y repetible, y es por eso que los motores paso apaso son tan eficaces para las aplicaciones de carga y posicionamiento. La conversión demovimiento rotativo a lineal dentro de un actuador lineal se logra a través del mecanismo tuerca-husillo. En general, los motores paso a paso producen menos de 1 hp y son, por lo tanto,usualmente utilizados en aplicaciones de control de posición de baja potencia, como impresoras,escáneres, impresoras 3D, plotters.
Principio de funcionamiento
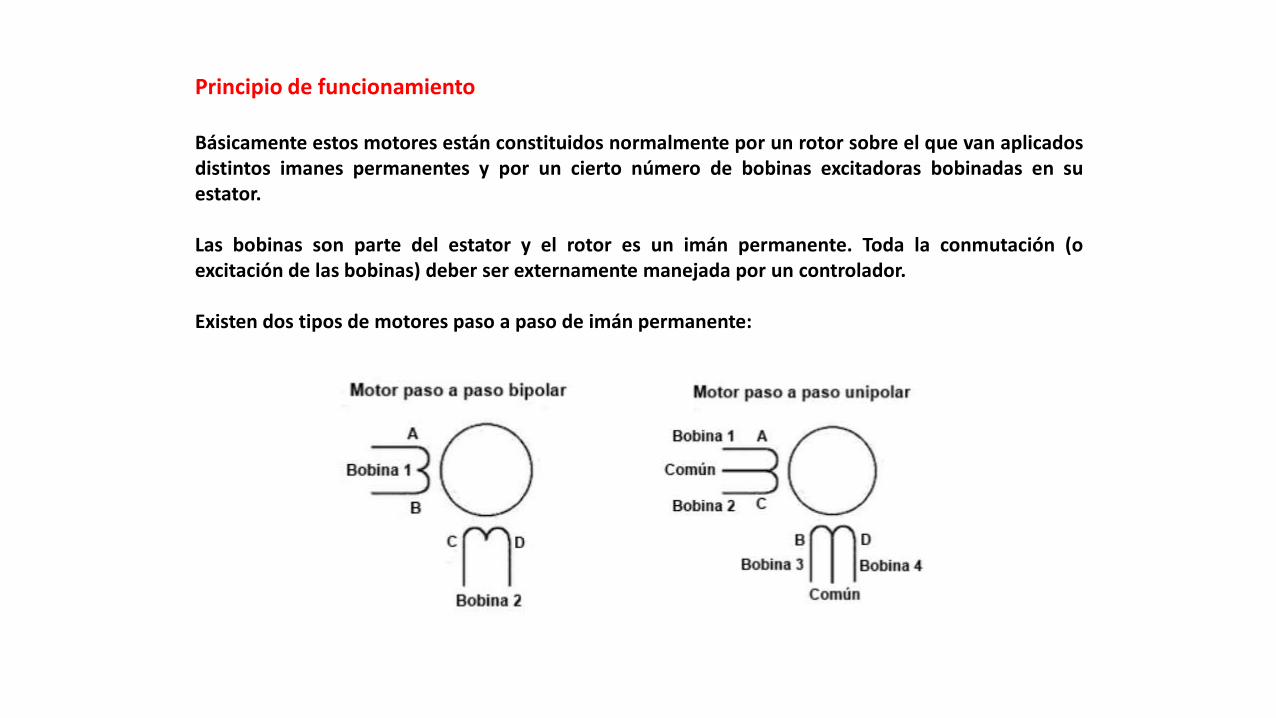
Básicamente estos motores están constituidos normalmente por un rotor sobre el que van aplicadosdistintos imanes permanentes y por un cierto número de bobinas excitadoras bobinadas en suestator.
Las bobinas son parte del estator y el rotor es un imán permanente. Toda la conmutación (oexcitación de las bobinas) deber ser externamente manejada por un controlador.
Existen dos tipos de motores paso a paso de imán permanente:
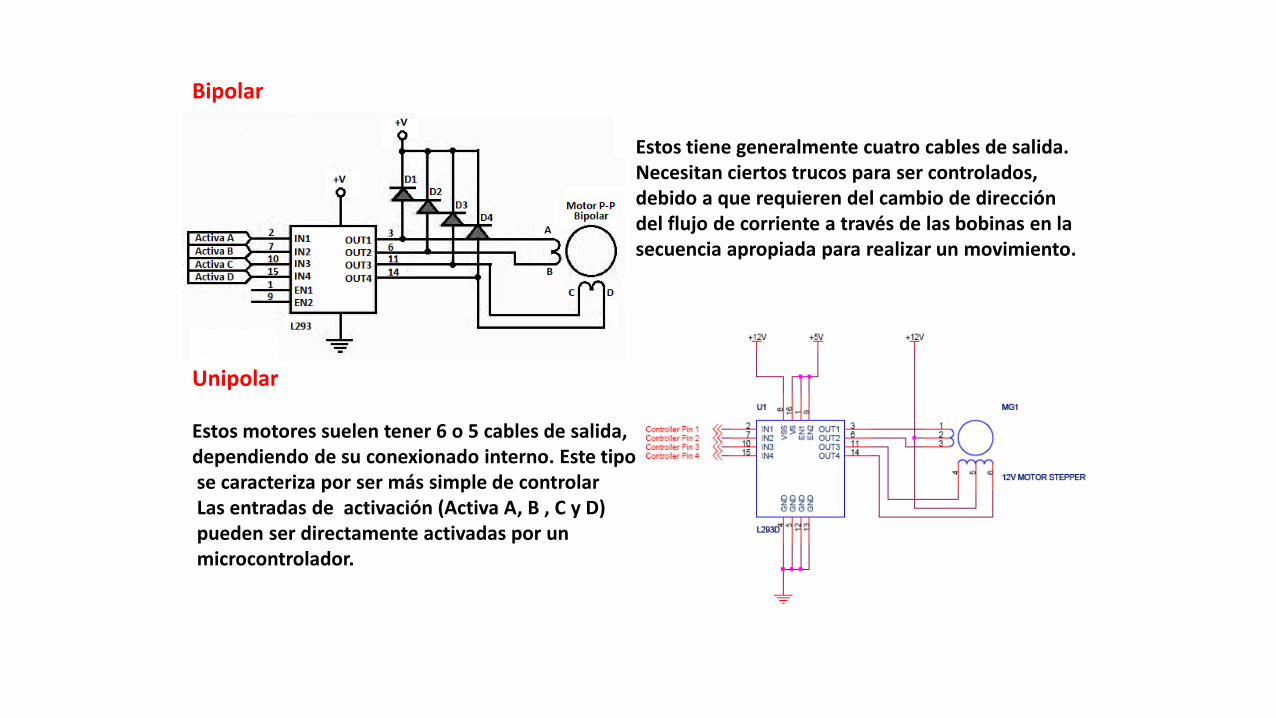
Bipolar
Estos tiene generalmente cuatro cables de salida.Necesitan ciertos trucos para ser controlados,debido a que requieren del cambio de direccióndel flujo de corriente a través de las bobinas en lasecuencia apropiada para realizar un movimiento.
Unipolar
Estos motores suelen tener 6 o 5 cables de salida,dependiendo de su conexionado interno. Este tipose caracteriza por ser más simple de controlarLas entradas de activación (Activa A, B , C y D)pueden ser directamente activadas por unmicrocontrolador.
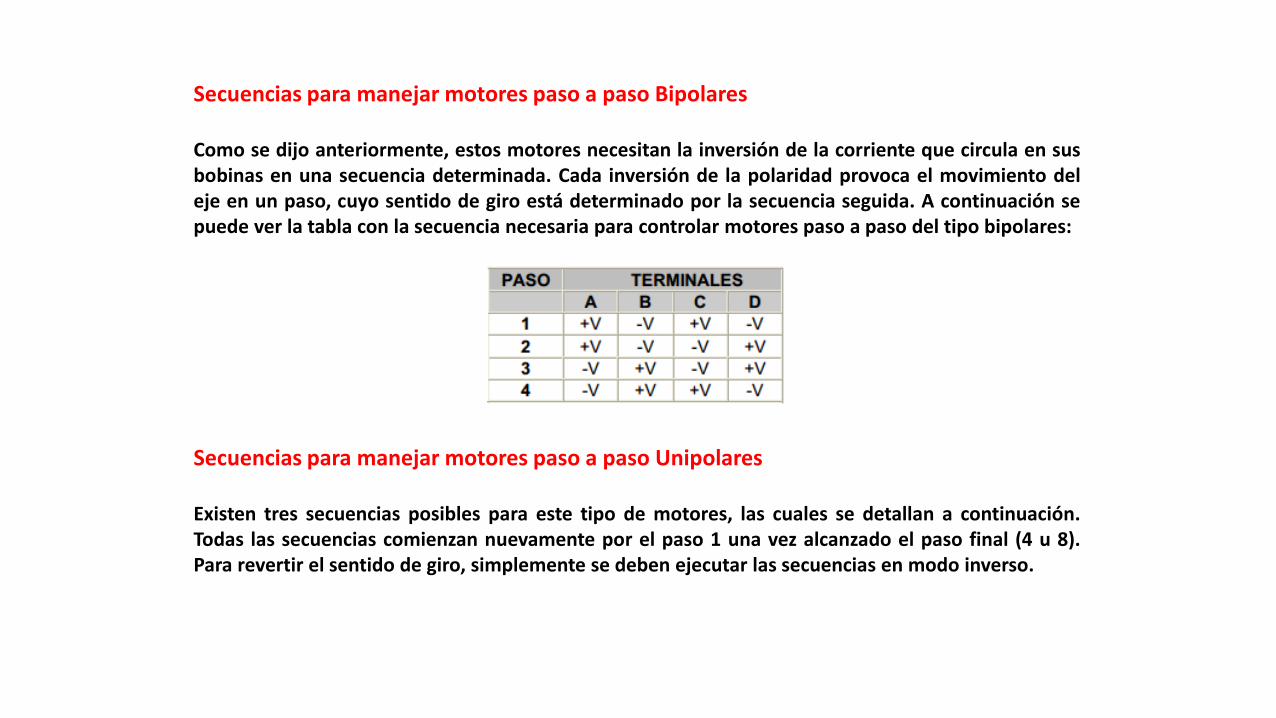
Secuencias para manejar motores paso a paso Bipolares
Como se dijo anteriormente, estos motores necesitan la inversión de la corriente que circula en susbobinas en una secuencia determinada. Cada inversión de la polaridad provoca el movimiento deleje en un paso, cuyo sentido de giro está determinado por la secuencia seguida. A continuación sepuede ver la tabla con la secuencia necesaria para controlar motores paso a paso del tipo bipolares:
Secuencias para manejar motores paso a paso Unipolares
Existen tres secuencias posibles para este tipo de motores, las cuales se detallan a continuación.Todas las secuencias comienzan nuevamente por el paso 1 una vez alcanzado el paso final (4 u 8).Para revertir el sentido de giro, simplemente se deben ejecutar las secuencias en modo inverso.

Secuencia Normal:
Esta es la secuencia más usada y la que generalmente recomienda el fabricante. Con esta secuencia el motor avanza un paso por vez y debido a que siempre hay al menos dos bobinas activadas, se obtiene un alto torque de paso y de retención.
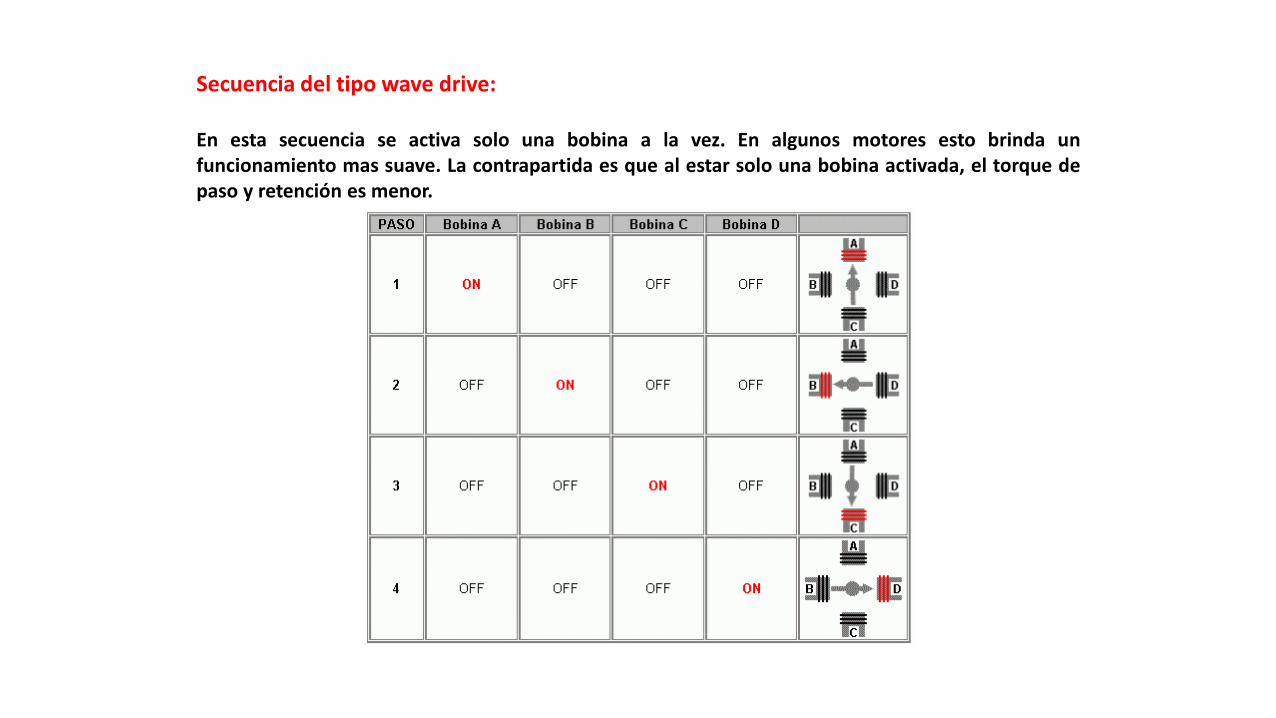
Secuencia del tipo wave drive:
En esta secuencia se activa solo una bobina a la vez. En algunos motores esto brinda unfuncionamiento mas suave. La contrapartida es que al estar solo una bobina activada, el torque depaso y retención es menor.
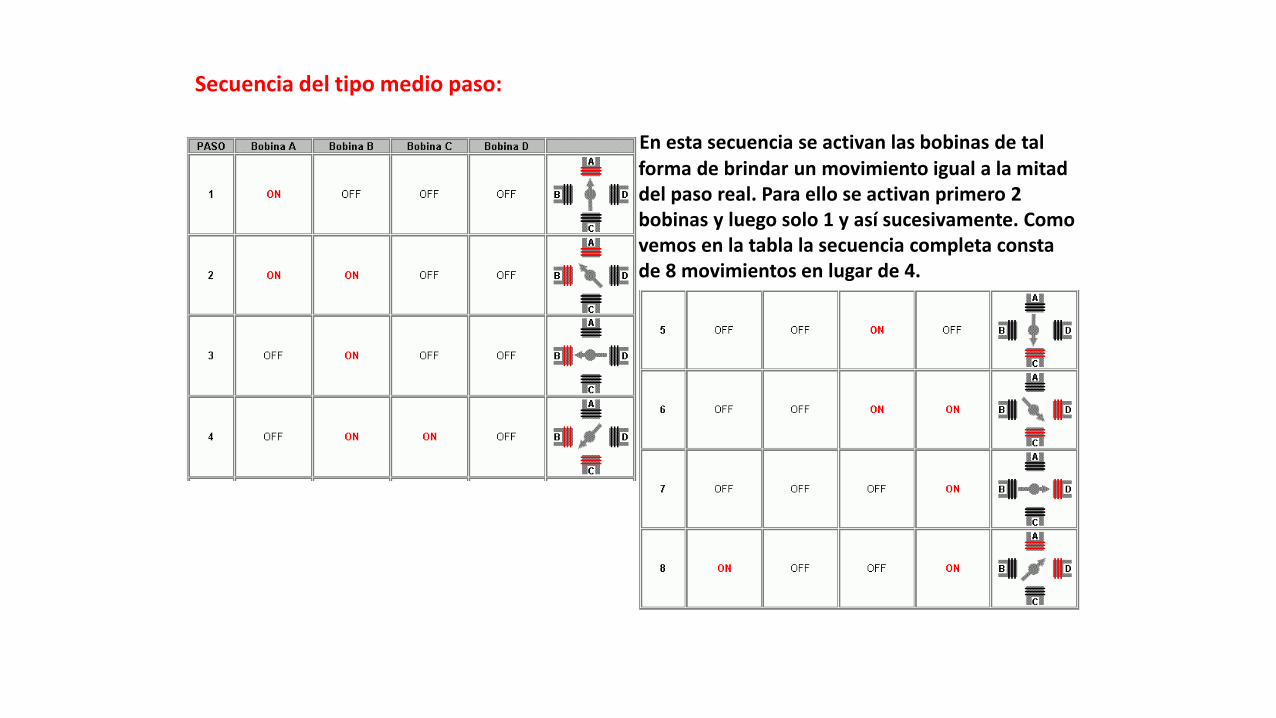
Secuencia del tipo medio paso:
En esta secuencia se activan las bobinas de tal forma de brindar un movimiento igual a la mitaddel paso real. Para ello se activan primero 2bobinas y luego solo 1 y así sucesivamente. Comovemos en la tabla la secuencia completa consta de 8 movimientos en lugar de 4.
Como comentario final, cabe destacar que debido a que los motores paso a paso son dispositivosmecánicos y como tal deben vencer ciertas inercias, el tiempo de duración y la frecuencia de lospulsos aplicados es un punto muy importante a tener en cuenta. En tal sentido el motor debealcanzar el paso antes que la próxima secuencia de pulsos comience. Si la frecuencia de pulsos esmuy elevada, el motor puede reaccionar en alguna de las siguientes formas:
• Puede que no realice ningún movimiento en absoluto.• Puede comenzar a vibrar pero sin llegar a girar.• Puede girar erráticamente.• O puede llegar a girar en sentido opuesto.
Para obtener un arranque suave y preciso, es recomendable comenzar con una frecuencia de pulsobaja y gradualmente ir aumentándola hasta la velocidad deseada sin superar la máxima tolerada. Elgiro en reversa debería también ser realizado previamente bajando la velocidad de giro y luegocambiar el sentido de rotación.
Video de trabajo artístico
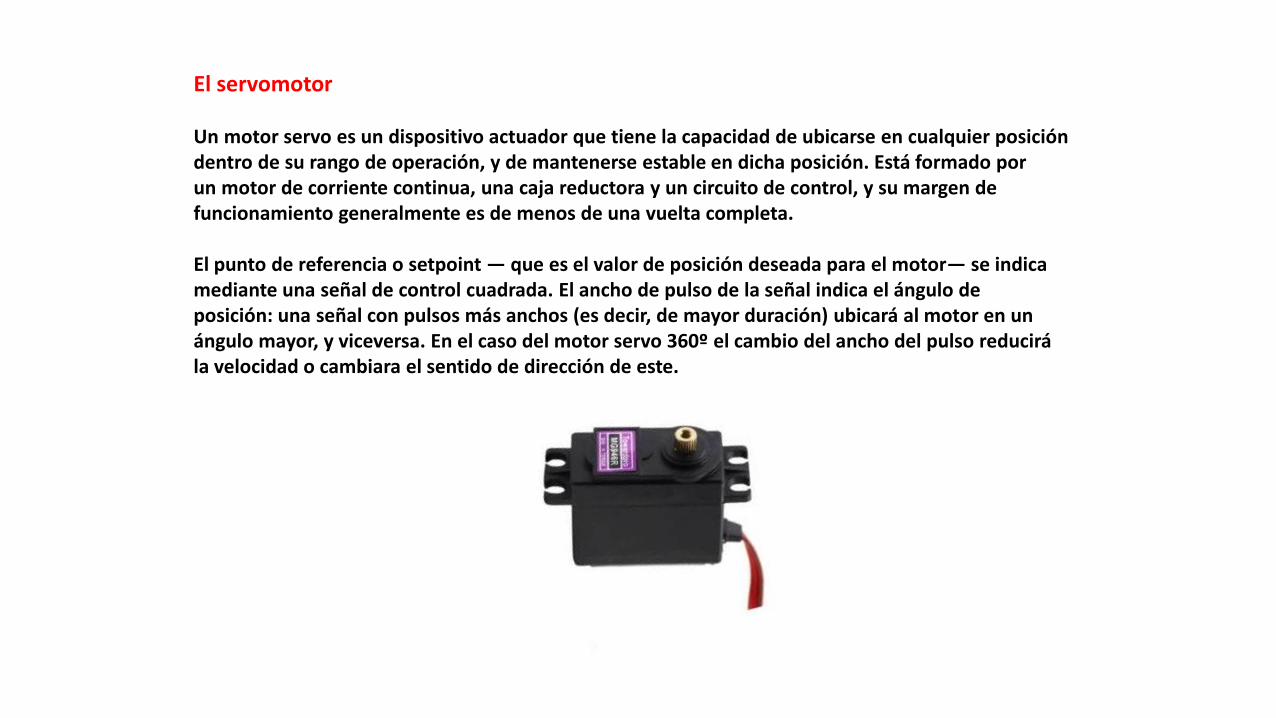
El servomotor
Un motor servo es un dispositivo actuador que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y de mantenerse estable en dicha posición. Está formado por un motor de corriente continua, una caja reductora y un circuito de control, y su margen de funcionamiento generalmente es de menos de una vuelta completa.
El punto de referencia o setpoint — que es el valor de posición deseada para el motor— se indica mediante una señal de control cuadrada. El ancho de pulso de la señal indica el ángulo de posición: una señal con pulsos más anchos (es decir, de mayor duración) ubicará al motor en un ángulo mayor, y viceversa. En el caso del motor servo 360º el cambio del ancho del pulso reducirá la velocidad o cambiara el sentido de dirección de este.
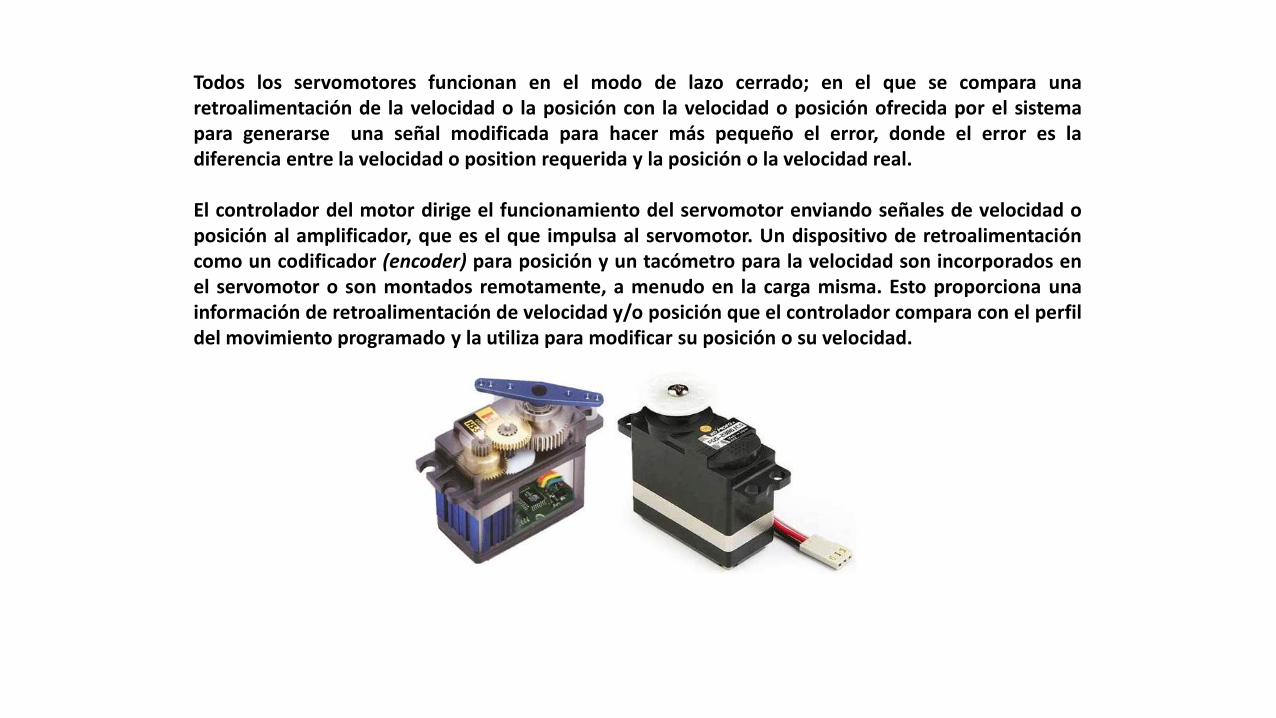
Todos los servomotores funcionan en el modo de lazo cerrado; en el que se compara unaretroalimentación de la velocidad o la posición con la velocidad o posición ofrecida por el sistemapara generarse una señal modificada para hacer más pequeño el error, donde el error es ladiferencia entre la velocidad o position requerida y la posición o la velocidad real.
El controlador del motor dirige el funcionamiento del servomotor enviando señales de velocidad oposición al amplificador, que es el que impulsa al servomotor. Un dispositivo de retroalimentacióncomo un codificador (encoder) para posición y un tacómetro para la velocidad son incorporados enel servomotor o son montados remotamente, a menudo en la carga misma. Esto proporciona unainformación de retroalimentación de velocidad y/o posición que el controlador compara con el perfildel movimiento programado y la utiliza para modificar su posición o su velocidad.
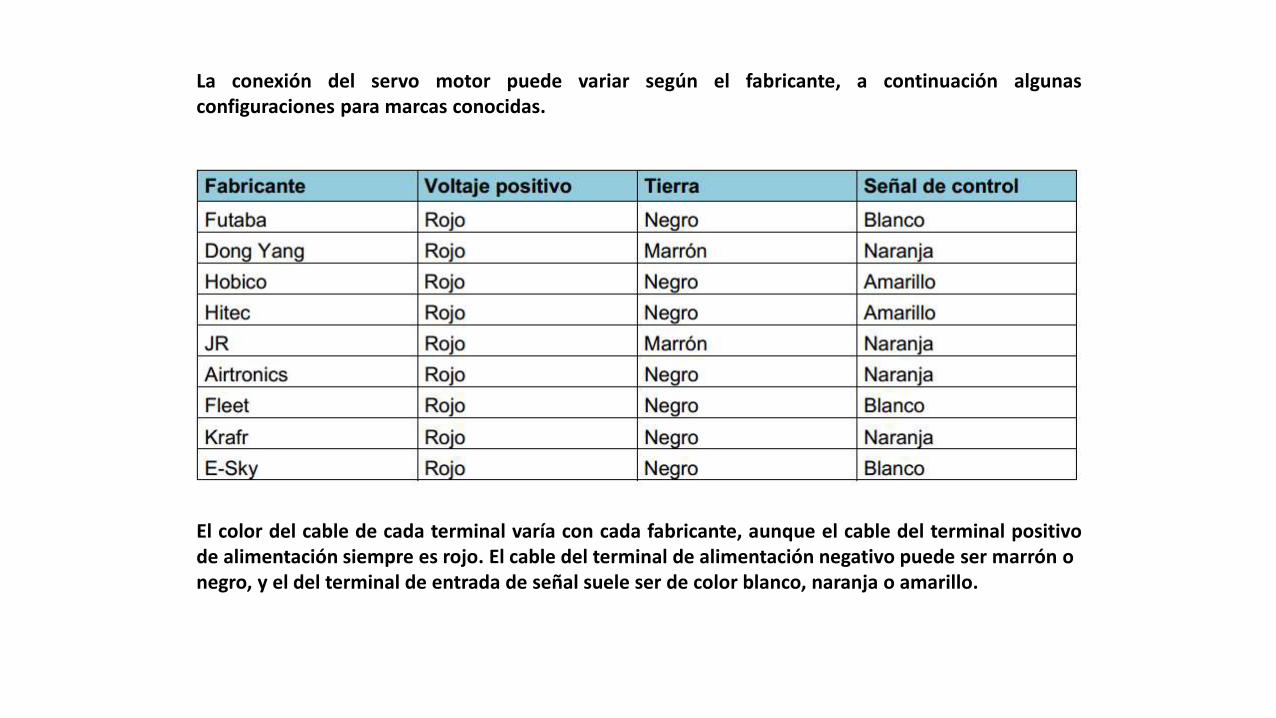
La conexión del servo motor puede variar según el fabricante, a continuación algunasconfiguraciones para marcas conocidas.
El color del cable de cada terminal varía con cada fabricante, aunque el cable del terminal positivode alimentación siempre es rojo. El cable del terminal de alimentación negativo puede ser marrón onegro, y el del terminal de entrada de señal suele ser de color blanco, naranja o amarillo.
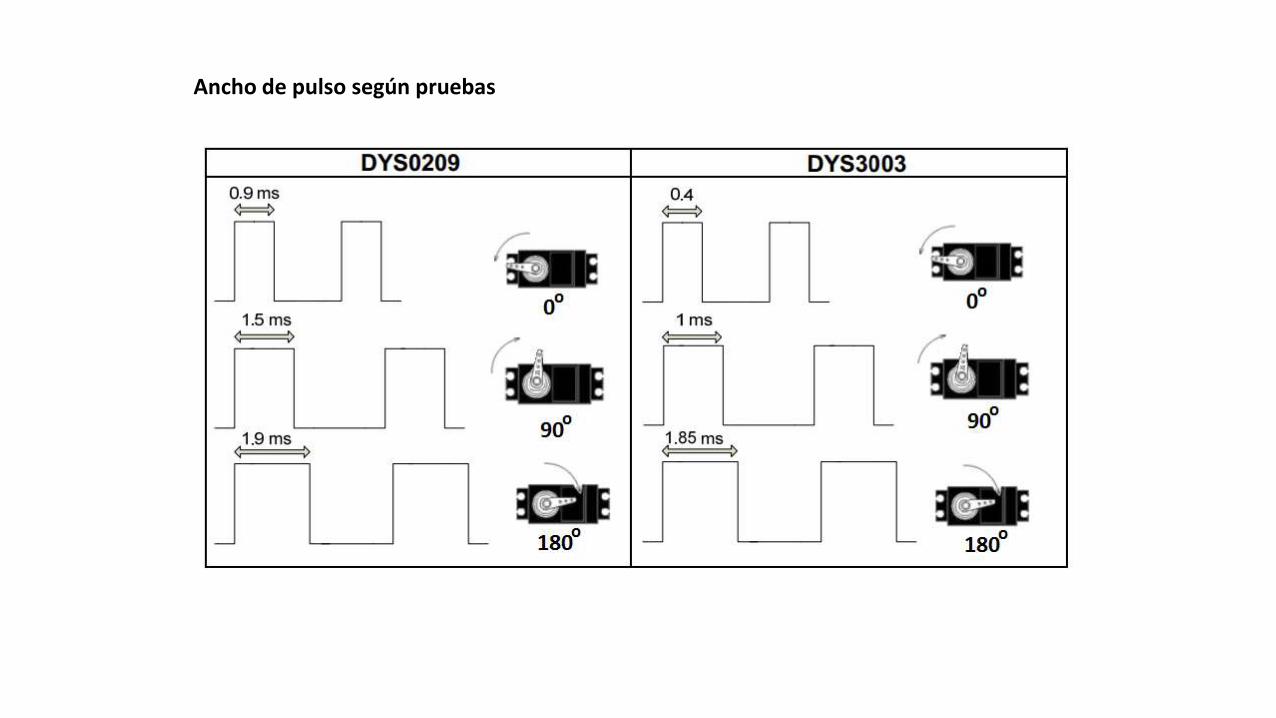
Ancho de pulso según pruebas

Video de cómo trabaja el servomotor
Video de trabajo artístico
Alambres musculares
La palabra “Alambres Musculares” es la traducción al español de ” Muscle Wires ” (la cual es unamarca registrada de la empresa Mondo Tronics ). La forma más sencilla de imaginarse uno de estos“Muscle Wires”, es pensando en un alambrito metálico delgado que cuando conduce corrienteeléctrica se contrae y cuando deja de conducir corriente se relaja, de forma muy parecida a como lohace un músculo.
Estos alambres vienen en muy distintos gruesos (hay unos incluso tan delgados como cabelloshumanos), y están fabricados de una aleación de níquel y titanio llamada “Nitinol” que cambia suestructura molecular con la temperatura (esto es lo que hace que se estiren y se contraigan).
Como esos alambres son realmente hilos metálicos conductores, pueden ser calentados con unacorriente eléctrica para que se contraigan, y dejarlos luego que se enfríen para que se relajen ypuedan ser estirados de nuevo. Los dos tipos más comerciales son los que requieren temperaturasde 70 y 90 grados centígrados para activarse. Los de 90 grados tienen la terminación HT (HighTemperature) y los de 70 grados terminan en “LT”. El nombre de estos alambres se divide en trespartes: “Flexinol” que es la marca, luego viene el diámetro en micrones, y luego si es HT o LT. Porejemplo: el alambre “FLEXINOL 100 HT” es de 100 micrómetros y se activa a 90 grados centígrados.
¿Qué tanto pueden contraerse y relajarse?
Estos alambres de nitinol pueden trabajar en rangos extremos de hasta un 8% o un 10% de sulongitud, pero se recomienda no exceder el rango de un 5% para que la aleación no sufra tantafatiga. Si se usan dentro de este rango del 5% pueden trabajar por millones de ciclos.
Breve historia del NiTinol
El efecto de esta aleación no es nuevo. Ya desde 1932 un investigador suizo llamado Arne Ölanderobservó este cambio de forma en una aleación de oro con cadmio, y se dio cuenta del potencial quetenía esto para lograr un movimiento utilizable. En 1950, L.C.Chang y T.A. Read, en la Universidad deColumbia en Nueva York, utilizaron rayos X para estudiar la estructura cristalina de la aleación. Sinembargo, no se llegó a comercializar popularmente debido al elevado precio de los elementos de laaleación.En 1961, mientras investigaban aleaciones resistentes a la corrosión para embarcaciones, un equipodirigido por William Beuhler, en el U.S. Naval Ordnance Laboratory (N.O.L) encontraron este mismoefecto en una aleación de níquel con titanio. Ellos llamaron a esta aleación “Nitinol” (combinaron lasletras de Niquel, Titanio y N.O.L.).
Durante los 60s y los 70s, se observó este mismo efecto en otras aleaciones más y empezó aproducirse comercialmente en muchas formas distintas: láminas, alambres, cintas, discos yempezaron por fin a aparecer multitud de aplicaciones comerciales para las mismas.
Ejemplos:Armazones de lentes que al ser aplastadas por accidente pueden recobrar su forma al ponerse enagua caliente.Dispositivos para liberar satélites y cargas en el espacio (La sonda CLEMENTINE fue de las primerasen utilizar estas aleaciones para desplegar sus paneles solares).
El Nitinol es biocompatible, así que se ha utilizado ya para aplicaciones dentro del cuerpo humano,por ejemplo: mecanismos para destapar arterias que se insertan plegados y se expanden con elcalor del cuerpo, aparatos de ortodoncia que se expanden lentamente con el calor de la boca delpaciente (y si el paciente en determinado momento siente demasiado dolor, basta con que se comaun helado para que la aleación se afloje un poco).
Efectos especiales, animatronics e incluso trucos de magia (Siempre es asombroso ver unaestructura de alambre moverse sola y recuperar su forma después de que ha sido aplastada).
Aplicaciones submarinas en agua salada: el nitinol no se oxida con el agua de mar, lo cual lo haceideal para aplicaciones submarinas.
Los alambres musculares se contraen tan rápido como se calientan - en una centésima de segundo omenos. Para que se relaje el alambre debe bajar su temperatura, que depende de las condiciones dealrededor del alambre y de su diámetro. Los alambres musculares HT tienen un tiempo de transicióndel 50% con respecto a los LT. Estas velocidades pueden ser incrementadas en 10 vecesventilándolos, o sumergiéndolos en agua o vaselina.
Comparados con los solenoides, los alambres musculares poseen muchas ventajas más. Tamañopequeño, livianos, bajo consumo, control preciso, activación por corriente continua o alterna, bajomagnetismo, accionamiento lineal directo, deformable, etc.
Para una larga vida útil y un buen perfomance de sus diseños debe tener en cuenta:
• Tener buen contacto eléctrico y mecánico• Proteger el alambre muscular de posibles sobrecalentamiento

Video artístico
Video de aplicación

Video
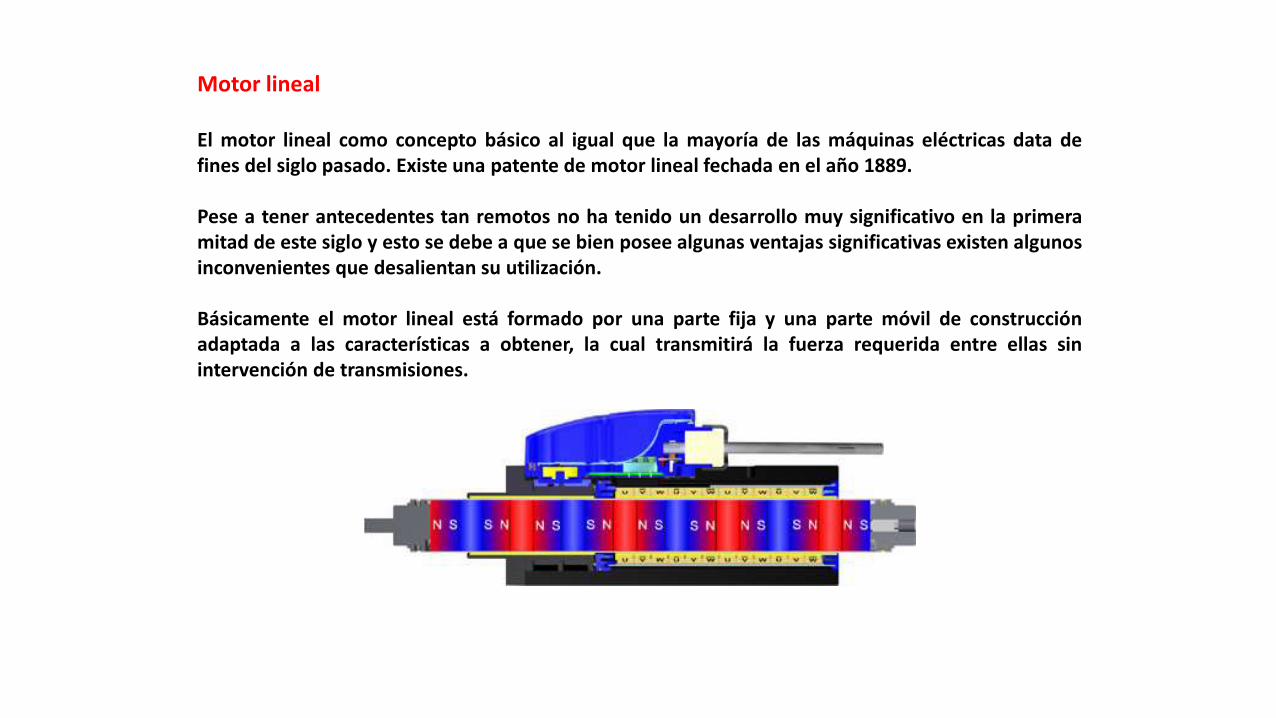
Motor lineal
El motor lineal como concepto básico al igual que la mayoría de las máquinas eléctricas data defines del siglo pasado. Existe una patente de motor lineal fechada en el año 1889.
Pese a tener antecedentes tan remotos no ha tenido un desarrollo muy significativo en la primeramitad de este siglo y esto se debe a que se bien posee algunas ventajas significativas existen algunosinconvenientes que desalientan su utilización.
Básicamente el motor lineal está formado por una parte fija y una parte móvil de construcciónadaptada a las características a obtener, la cual transmitirá la fuerza requerida entre ellas sinintervención de transmisiones.
El principio de funcionamiento del motor lineal permite obtener una forma de conversión de laenergía cuyas ventajas se imponen en forma determinante en todos los sectores en donde están enjuego fuerzas para traslación; el motor lineal provee por sí mismo un esfuerzo de propulsión sinningún medio de transmisión mecánica y con solamente el vínculo electromagnético entre laspartes fijas y móviles. De esta forma se elimina el recurso clásico de transformar el movimiento derotación del motor convencional en un movimiento lineal eliminando los conocidos problemas delos sistemas de transmisión y de adherencia en las ruedas motrices. El principal inconvenienteradica en el hecho de que es más difícil mantener las distancias entre inductor e inducido que en losmotores rotantes, y vale la plena recordar que el entrehierro es lo que demanda la mayorintensidad de campo para lograr la inducción necesaria. Los motores lineales tienen por lo generalmayor tamaño y menor rendimiento que los motores rotantes de igual potencia.
Es fácil deducir que a pesar de su costo todavía demasiado elevado, estos tipos de motorespermiten resolver diversos problemas ya sea en el campo del transporte como en de las máquinasherramientas.
Video que muestra la aplicación de los motores lineales

Video artístico

Plataforma de tijera con motor lineal

Video
Video

Video

Video
La física
Física es un término que proviene del griego phisis y que significa “realidad” o “naturaleza”. Se tratade la ciencia que estudia las propiedades de la naturaleza con la asistencia del lenguaje matemático.La física se encarga de las propiedades de la materia, la energía, el tiempo y sus interacciones.
Esta ciencia no es sólo teórica: también es una ciencia experimental. Sus conclusiones pueden serverificadas mediante experimentos. Además sus teorías permiten realizar predicciones acerca de losexperimentos futuros. Ante el amplio campo de estudio y su extenso desarrollo histórico, la física esconsiderada como una ciencia fundamental o central.
Entre las principales teorías de la física, puede mencionarse a la mecánica clásica (que describe elmovimiento macroscópico), el electromagnetismo (se encarga de los fenómenos electromagnéticoscomo la luz), la relatividad (analiza el espacio-tiempo y la interacción gravitatoria), latermodinámica (sobre los fenómenos moleculares y de intercambio de calor) y la mecánica cuántica(que estudia el comportamiento del mundo atómico).Por último, cabe destacar que algunas de lasáreas de investigación de la física son la física teórica, la materia condensada, la física atómicay molecular, la física de partículas o de altas energías, la astrofísica y la biofísica.
Estática
La Estática es la parte de la física que estudia los cuerpos sobre los que actúan fuerzas y momentoscuyas resultantes son nulas, de forma que permanecen en reposo o en movimiento no acelerado. Elobjeto de la estática es determinar la fuerza resultante y el momento resultante de todas las fuerzasque actúan sobre un cuerpo para poder establecer sus condiciones de equilibrio. O en otraspalabras es la parte de la mecánica física que se ocupa de los sistemas de fuerza.
Fuerza
Es toda acción capaz de producir o modificar un movimiento. Es una magnitud vectorial. La unidad de medida es el Kilogramo Fuerza (Kg o Kgf): peso del kilogramo patrón depositado en la oficina internacional de medidas ( Sevres - Francia), a nivel del mar y 45º latitud, construido en aleación de Platino-Iridio. En el Sistema Métrico, la unidad de fuerza es el Newton que equivale a 0.102 Kg.
Dinamómetros
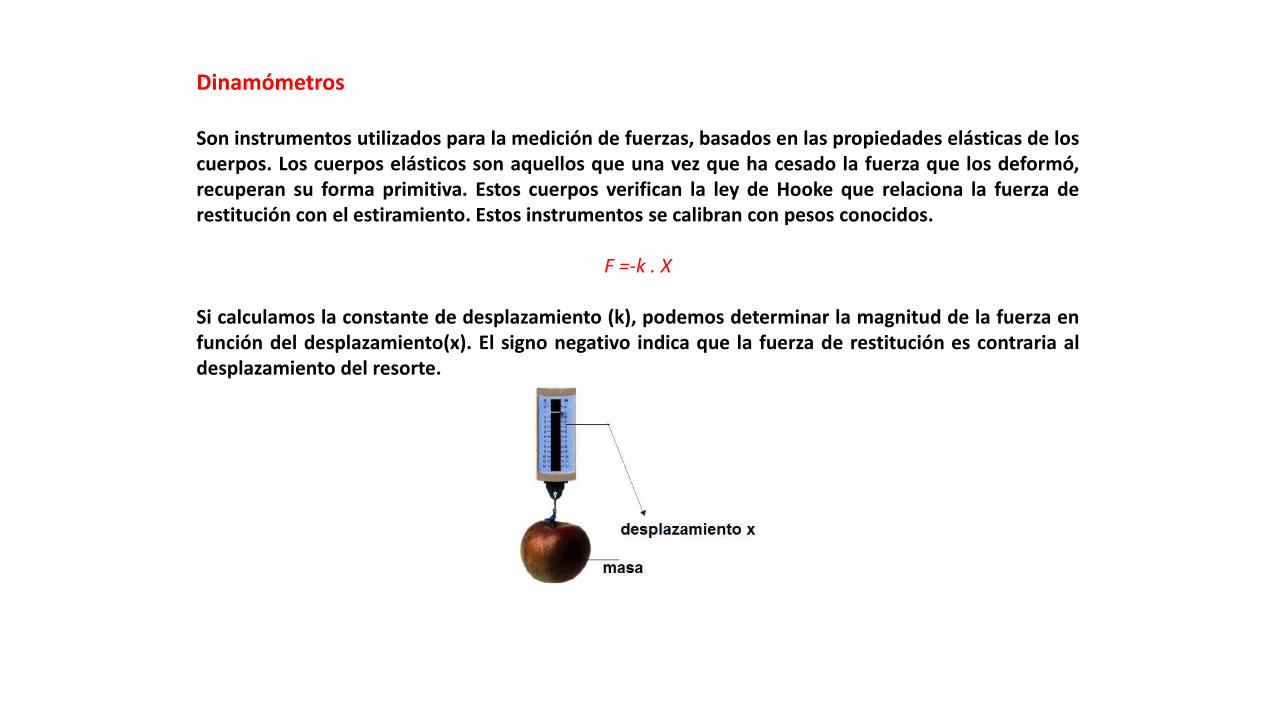
Son instrumentos utilizados para la medición de fuerzas, basados en las propiedades elásticas de loscuerpos. Los cuerpos elásticos son aquellos que una vez que ha cesado la fuerza que los deformó,recuperan su forma primitiva. Estos cuerpos verifican la ley de Hooke que relaciona la fuerza derestitución con el estiramiento. Estos instrumentos se calibran con pesos conocidos.
F =-k . X
Si calculamos la constante de desplazamiento (k), podemos determinar la magnitud de la fuerza enfunción del desplazamiento(x). El signo negativo indica que la fuerza de restitución es contraria aldesplazamiento del resorte.
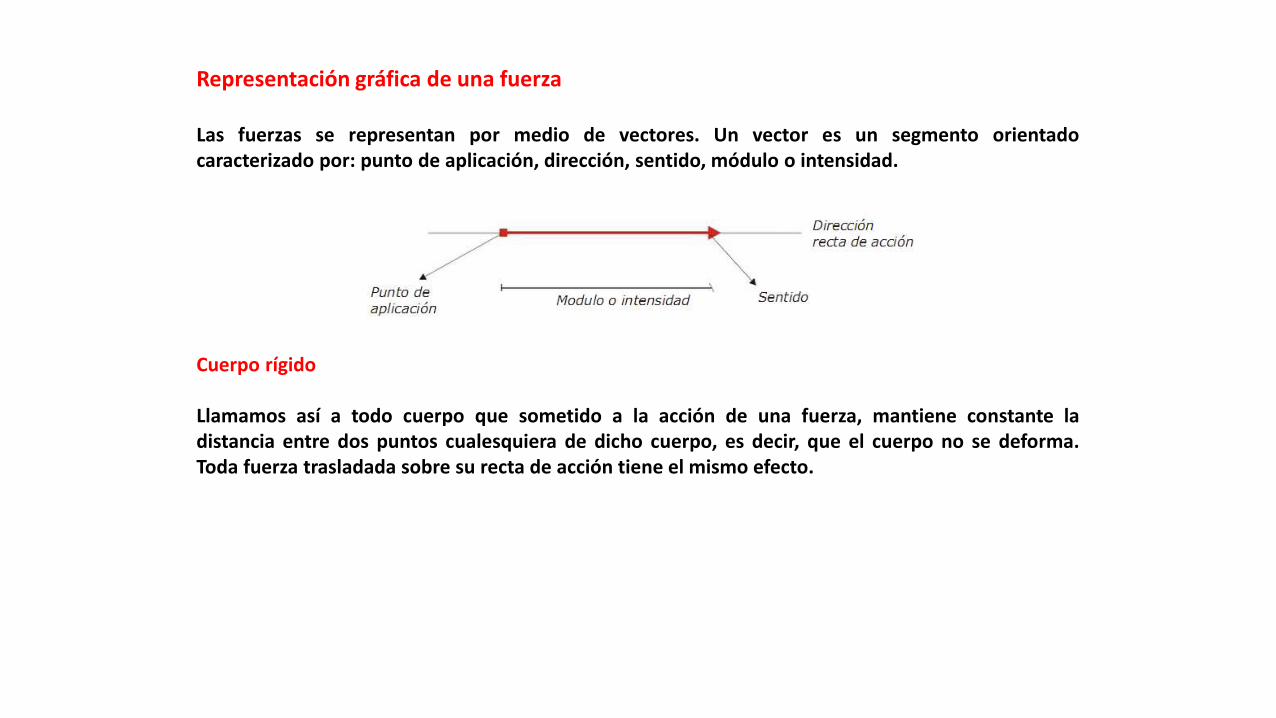
Representación gráfica de una fuerza
Las fuerzas se representan por medio de vectores. Un vector es un segmento orientadocaracterizado por: punto de aplicación, dirección, sentido, módulo o intensidad.
Cuerpo rígido
Llamamos así a todo cuerpo que sometido a la acción de una fuerza, mantiene constante ladistancia entre dos puntos cualesquiera de dicho cuerpo, es decir, que el cuerpo no se deforma.Toda fuerza trasladada sobre su recta de acción tiene el mismo efecto.
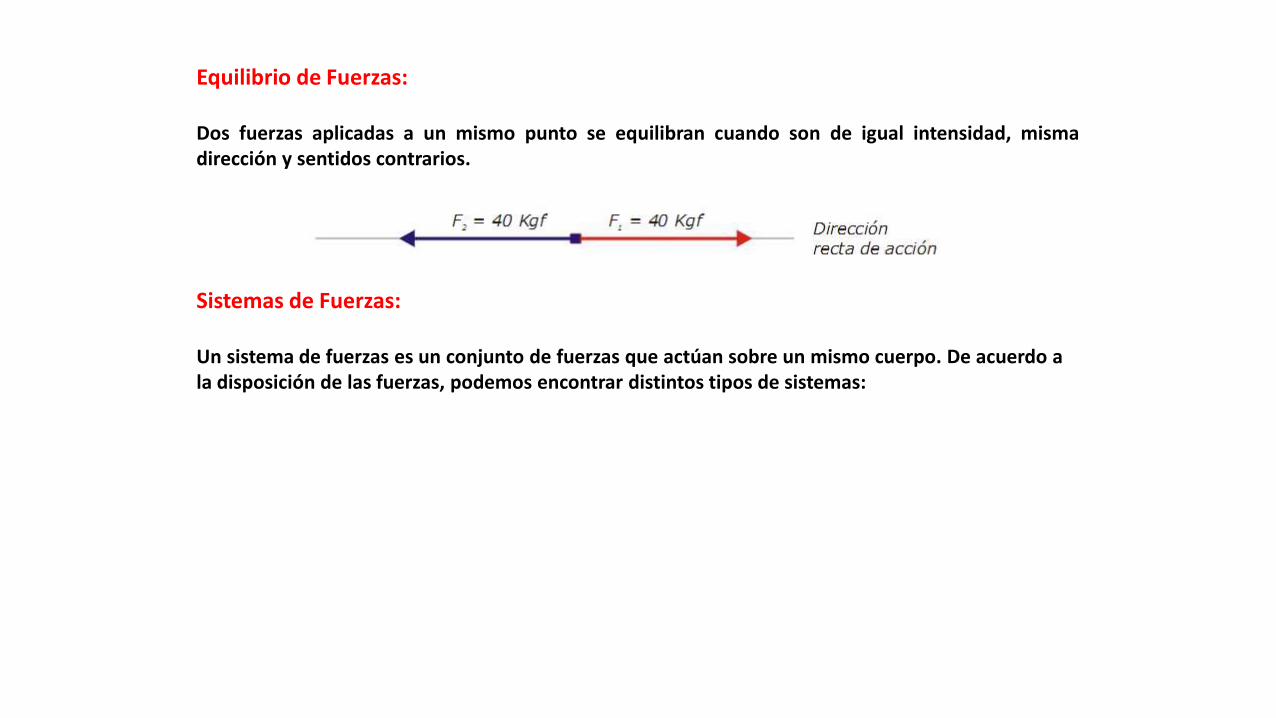
Equilibrio de Fuerzas:
Dos fuerzas aplicadas a un mismo punto se equilibran cuando son de igual intensidad, mismadirección y sentidos contrarios.
Sistemas de Fuerzas:
Un sistema de fuerzas es un conjunto de fuerzas que actúan sobre un mismo cuerpo. De acuerdo a la disposición de las fuerzas, podemos encontrar distintos tipos de sistemas:
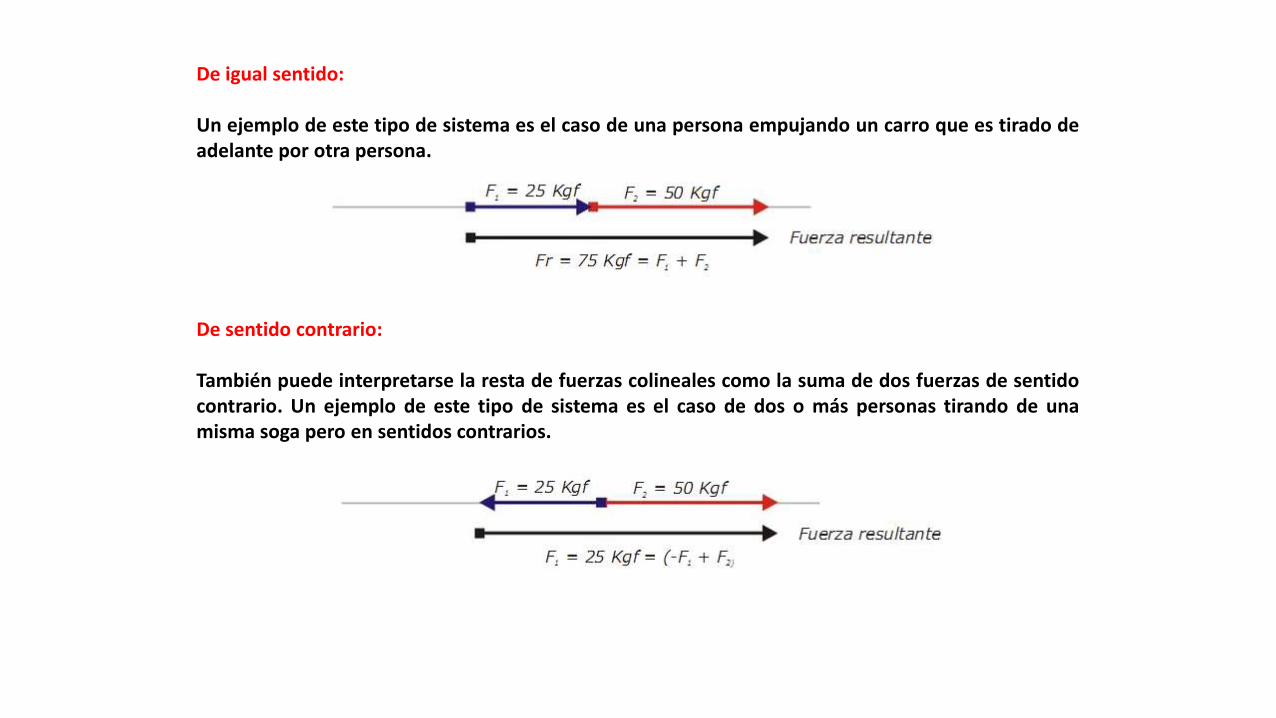
De igual sentido:
Un ejemplo de este tipo de sistema es el caso de una persona empujando un carro que es tirado deadelante por otra persona.
De sentido contrario:
También puede interpretarse la resta de fuerzas colineales como la suma de dos fuerzas de sentidocontrario. Un ejemplo de este tipo de sistema es el caso de dos o más personas tirando de unamisma soga pero en sentidos contrarios.
Centroide
En geometría, el centroide o baricentro de un objeto X perteneciente a un espacio n-dimensional esla intersección de todos los hiperplanos que dividen a X en dos partes de igual cantidad demovimiento con respecto al hiperplano. Informalmente, es el promedio de todos los puntos de X.
Centro de Gravedad
El centro de gravedad es el punto de aplicación de la resultante de todas las fuerzas de gravedadque actúan sobre las distintas porciones de un cuerpo, de tal forma que el momento respecto acualquier punto de esta resultante aplicada en el centro de gravedad es el mismo que el producidopor los pesos aplicados a dicho cuerpo.
Centro de Masas
En un tratamiento de sistemas de masas puntuales el centro de masas es el punto donde, paraefectos inerciales, se supone concentrada toda la masa del sistema. El concepto se utiliza paraanálisis físicos en los que no es indispensable considerar la distribución de masa. Por ejemplo, en lasórbitas de los planetas.
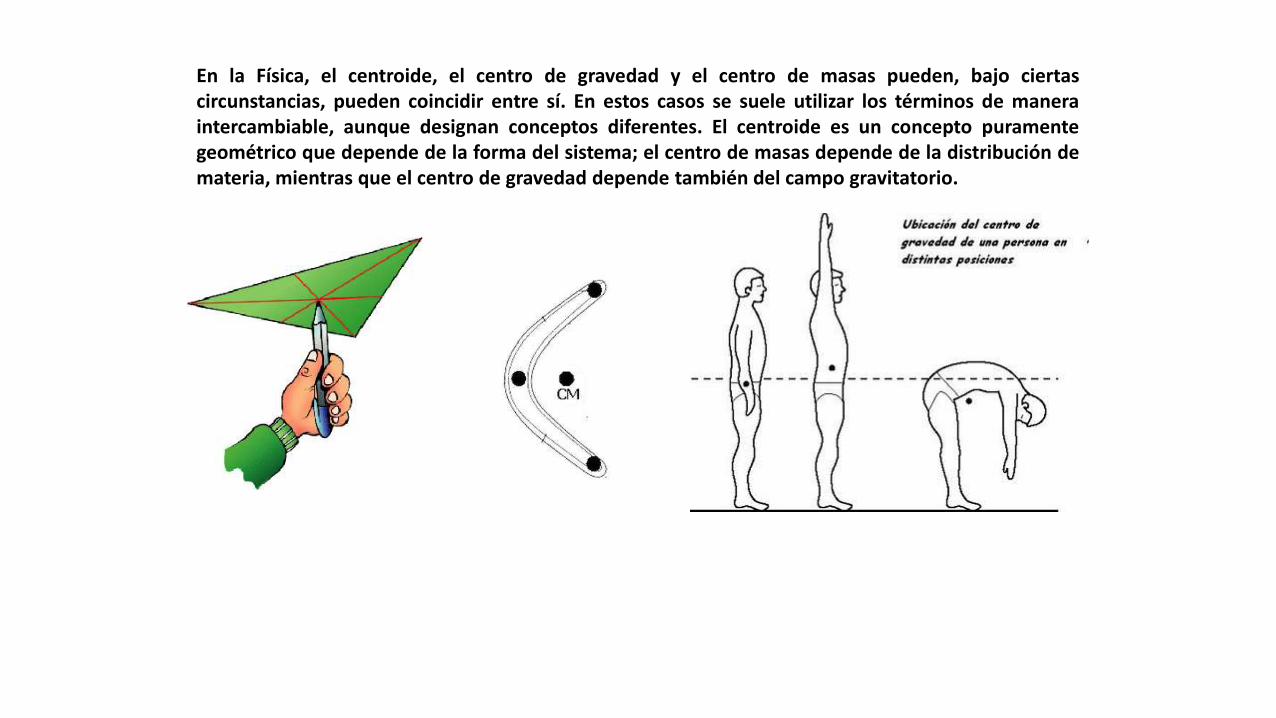
En la Física, el centroide, el centro de gravedad y el centro de masas pueden, bajo ciertascircunstancias, pueden coincidir entre sí. En estos casos se suele utilizar los términos de maneraintercambiable, aunque designan conceptos diferentes. El centroide es un concepto puramentegeométrico que depende de la forma del sistema; el centro de masas depende de la distribución demateria, mientras que el centro de gravedad depende también del campo gravitatorio.
Para el diseño de mecanismos es necesario conocer algo de trigonometría, por lo tanto veamosunos videos que nos ayudaran a comprender de forma más fácil los conceptos de seno, coseno ytangente, así como sus recíprocos, cotangente, secante y cosecante. Primero el Teorema dePitágoras.
Ahora veamos el círculo unitario del cual provienen todas las funciones trigonométricas
Primera parte











![Mecanismos[1]al fin](https://static.fdocumento.com/doc/165x107/55979d421a28abd8488b4635/mecanismos1al-fin.jpg)





