Protocolo de Investigación Desarrollo y Modelado de …€¦ · Fecha: 15 de Marzo de 2011...
10
Fecha: 15 de Marzo de 2011 Protocolo de Investigación Título: Desarrollo y Modelado de un robot humanoide Participantes: Dr. José Víctor Núñez Nalda Dr. Domingo Torres Cruz M. C. Víctor Rodríguez Velázquez
Transcript of Protocolo de Investigación Desarrollo y Modelado de …€¦ · Fecha: 15 de Marzo de 2011...

Fecha: 15 de Marzo de 2011
Protocolo de Investigación
Título: Desarrollo y Modelado de un robot humanoide
Participantes:
Dr. José Víctor Núñez Nalda Dr. Domingo Torres Cruz
M. C. Víctor Rodríguez Velázquez

9
Caminado energético para robots humanoides
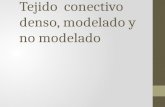
Figura 1.- Robots humanoides desarrollados por empresas con fines principalmente comerciales
Antecedentes
En la actualidad, el desarrollo de robots humanoides ha cobrado una gran relevancia no solo dentro del ámbito de la investigación científica sino además en el ámbito de las empresas que buscan innovar con robots humanoides en diversas áreas de aplicación. Para un vistazo general y actualizado de robots humanoides, se recomiendan los sitios (1), (2).
Como ejemplo de aplicaciones comerciales de la robótica humanoide, destacan Toyota con su línea de partner robots (3), Honda con ASIMO (4), PAL robotics quienes han creado REEM-B (5), mientras que la compañía vietnamita TOSY nos asombra con TOPIO (6).
Es importante resaltar que la robótica humanoide es desarrollada por empresas automotrices, acostumbradas a lidiar con la responsabilidad de crear y construir maquinas en contacto cotidiano con las personas, mientras que las grandes constructoras de robots industriales como fanuc, ABC, etc. no han incursionado en el mundo de los humanoides.
Además de estos proyectos de robots antropomorfos de tamaño natural (similar a la talla promedio de los seres humanos), hay un gran número de empresas dedicadas a la robótica humanoide con fines lúdicos; tal es el caso de Tosy con TOPIO tiny, Aldebaran robotics con NAO (7) (8), ROBOTIS y su Bioloid (9); Kondo que diseño y fabrico KHR (10). Los robots mencionados se muestran en la Figura 1.
Pg. 1 de 8

9
Caminado energético para robots humanoides
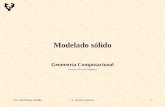
Figura 2.- Robots humanoides desarrollados en laboratorios universitarios.
En un contexto diferente, existen además grandes proyectos de robótica humanoide que son llevados a cabo por universidades alrededor del mundo. La mayor parte de estos proyectos se desarrollan por medio de convenios entre diferentes universidades y laboratorios de investigación. Es posible decir que el liderato en lo que se refiere a humanoides es establecido por este tipo de proyectos que se llevan a cabo en contextos nacionales o inclusive entre universidades de varias naciones.
En esta categoría debemos destacar los proyectos HRP desarrollado en conjunto por Japón y Francia (11) (12) (13) (14) (15). En la Figura 2 aparecen el robot HRP-2, sucesor universitario del robot ASIMO, el robot HRP-3 que puede emplearse en exteriores ya que está aislado de polvo y humedad. Estos dos robots humanoides están acompañados del prototipo de HRP-4 robot con características femeninas y que ha sido presentado en algunas pasarelas de moda en Tokio.
Pg. 2 de 8

9
Caminado energético para robots humanoides
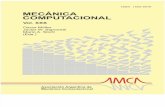
Figura 3.- Los robots caminantes semi- accionados están basados en la idea de estabilizar una orbita periódica que representa el caminado.
Principio del caminado pasivo
Esta serie de proyectos fue desarrollada por una iniciativa del gobierno japonés a través de National Institute of Advanced Industrial Science and Technology (AIST). La colaboración entre científicos japoneses del Humanoid Robotics Group (Universidad de Tsukuba) y del Laboratorio de Robótica de Paris (Universidad de Paris), fructífero en el diseño y construcción del primer prototipo de HRP-1S y en la creación de un laboratorio común de investigación en robótica entre Francia y Japón, llamado Joint Robotics Laboratory (JRL). Cabe mencionar que bajo este proyecto binacional, varias universidades y laboratorios son beneficiados al poder utilizar esta plataforma de desarrollo en robótica (HRP y OpenHRP). Proyectos de una envergadura similar, como los mostrados en la Figura 2 pueden ser encontrados en varias universidades y laboratorios de diferentes países.
En enfoque hacia el problema del caminado de los robots humanoides que se tratará en este proyecto de investigación es el del caminado energético. Algunos mecanismos y robots creados en para estudiar este enfoque se presentan en la Figura 3. Nuestra propuesta es aplicar este enfoque en los robots humanoides de entretenimiento tales que el Bioloid y el KHR.
Pg. 3 de 8

9
Caminado energético para robots humanoides
El modelo de robot caminante más estudiado para comprender el principio del caminado de ciclo limite es el robot caminante de pasos de compás (CGBR, por sus siglas en ingles) que aparece en alto en la Figura 3. Los prototipos que también aparecen en esta ilustración son:
a) Rabbit, del C.N.R.S,
b) Robot Caminante pasivo 3D, Cornell,
c) Robot caminante acciondo 3D, Cornell
d) Toddler con rodillas, M.I.T.
e) Denise, Delft.
Basados en los estudios previos que se presentan en la literatura científica sobre el tema de los robots caminantes pasivos (16) (17), (18) y semi-accionados, se profundizará en la comprensión de estos principios y se aplicará tal metodología a robots completamente accionados como el robot Bioloid (9).
En este sentido se aplicaran los conocimientos ganados en trabajos anteriores sobre modelado y control de robots (19), (20); sobre locomoción de robots humanoides (21), (22), (23) y sobre la marcha del robot Bioloid, (24) - (32).
Bibliografía
1. Willis, Chris and Serrat, Regis. Android World. [Online] 10 11, 2009. [Cited: 01 19, 2010.]
http://www.androidworld.com/.
2. Wikipedia contributors. Humanoid robot. Wikipedia, The Free Encyclopedia. [Online] Enero 15, 2010.
[Cited: Enero 19, 2010.] http://en.wikipedia.org/wiki/Humanoid_robot.
3. Toyota motor Corporation. Robot technology / Partner robots. Toyota. [Online] 2010. [Cited: Enero 19,
2010.] http://www2.toyota.co.jp/en/tech/robot/p_robot/index.html#.
4. American Honda Motor Co. Inc. Asimo The world most advanced humanoid robot. [Online] 2010. [Cited:
Enero 19, 2010.] http://asimo.honda.com/.
5. Pal Technology. REEM. [Online] 2007. [Cited: Enero 19, 2010.] http://www.pal-robotics.com/.
6. TOSY Robotics JSC . TOPIO Tossy pingpong playing robot. [Online] Noviembre 25, 2009. [Cited: Enero 19,
2010.] http://topio.tosy.com.
7. Aldebaran Robotics. [Online] Enero 18, 2010. [Cited: Enero 19, 2010.] http://www.aldebaran-
robotics.com/en/.
Pg. 4 de 8

9
Caminado energético para robots humanoides
8. The NAO humanoid: a combination of performance and affordability. Gouaillier, David, et al. 2008,
submitted to IEEE Transactions on Robotics, currently at Computer Research Repository (CoRR).
9. www.robotis.com. Educational robot kit "Bioloid". Robotis. [Online] Septiembre 18, 2009. [Cited: Enero
19, 2010.] http://www.robotis.com/zbxe/bioloid_en.
10. Kondo Kagaku co.,ltd. Kondo, Making your robot dream a reality. [Online] Marzo 23, 2008. [Cited:
Enero 19, 2010.] http://www.kondo-robot.com/EN/.
11. Humanoid Robotics Group Intelligent Systems Institute AIST. Humanoid Robotics Group Intelligent
Systems Institute AIST. [Online] 2007. [Cited: 01 25, 2010.] http://www.is.aist.go.jp/humanoid/.
12. AIST-CNRS . Joint Japanese-French Robotics Laboratory. Joint Japanese-French Robotics Laboratory.
[Online] Abril 2007. [Cited: Enero 25, 2010.] http://www.laas.fr/JRL-France/jrl-index-en.htm.
13. Kawada Industries Inc. Kawada Mechatronics. Humanoid Robot HRP-2 "Promet". [Online] 2009. [Cited:
Enero 25, 2010.] http://global.kawada.jp/mechatronics/hrp2.html.
14. Humanoid robot HRP-2. Kaneko, K., et al. 2004. Proceedings of IEEE International Conference on
Robotics and Automation, (ICRA 2004). Vol. 2, pp. 1083- 1090. ISBN 0-7803-8232-3.
15. Development of humanoid robot HRP-3P. Tsukuba : s.n., 2005. Proceeding of IEEE-RAS International
Conference on Humanoid Robots (Humanoids 2005). pp. 50-55. ISBN: 0-7803-9320-1.
16. A Study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos. Goswami, A., Thuilot,
B. and Espiau, B. 12, Noviembre 1998, The International Journal of Robotics Research, Vol. 17, pp. 1282 -
1301.
17. Passivity Based Control of The Compass Gait Biped. Spong, M.W. Beijing, China : s.n., 1999. IFAC World
Congress. pp. 19 - 24.
18. Hobbelen, D. G. E. and Wisse, M. Limit cycle walking. [book auth.] M. Hackel. Humanoid Robot: Human
Like Machines. Croatia : ARSI, I - Tech, 2007, pp. 277 - 294.
19. R. Garrido y D. Torres-Cruz. “Control visual de robots paralelos planares”. Memorias del XI Congreso
Latinoamericano de Control Automático. Habana, Cuba, 2004.
20. R. Garrido y D. Torres-Cruz. “On PD control of parallel robots with redundant actuation”. Proceedings of
the 1st. Internatiotional Conference on Electrical and Electronics Engineerin, Acapulco, Guerrero, México,
2004.
Pg. 5 de 8

9
Caminado energético para robots humanoides
21. Pámanes G.J.A., Núñez Nalda J.V.; “Análisis del Caminado de un Robot Bípedo Para un Patrón de Marcha
Basado en Movimientos Cicloidales”; Memorias del III Congreso Mexicano de Robótica de la AMRob ; pp.
62-67, Querétaro, México, 2001.
22. Nunez V., Yokoi K., Nadjar Gauthier N., Blazevic P., Stasse O; “Whole body posture controller based on
inertial forces”; Proceedings of the 2006 IEEE Int. Conf. on Humanoid Robots (IEEE Humanoids 06); Genova,
Italia, Diciembre 2006.
23. Nunez V., Yokoi K., Nadjar Gauthier N., Blazevic P., Stasse O. “Inertial Forces Posture Control for
Humanoid Robots Locomotion”, capítulo en el libro Humanoid robots: human-like machines. ISBN:
3902613076; I-Tech Education and Publishing, Vienna, Austria, 2007.
24. Zúñiga C.A., Pámanes J. A., Arias L.E., Nunez J.V.(2010). Optimización de la Marcha de Robots Bípedos en
la Fase de Soporte Simple. En actas del XII Congreso Mexicano de Robótica (COMROB), Mazatlán, Sinaloa.
25. Victor Nunez, Luis I. Olvera, J. Alfonso Pámanes (2009). Estudio teórico y experimental del equilibrio de
la marcha del robot humanoide bioloid. En actas del XI Congreso Mexicano de Robótica (COMROB). Celaya,
Guanajuato.
26. J. Alfonso Pámanes García, J. Víctor Nuñez N., J. Antonio Guzman García; (2009), Estrategia para la
resolución de la cinemática inversa del robot bioloid. En actas del XI Congreso Mexicano de Robótica
(COMROB). Celaya, Guanajuato.
27. Luis I. Olvera, J. Víctor Nuñez, J. Alfonso Pámanes (2009). Evaluación experimental de patrones de
marcha cicloidales en el robot humanoide bioloid. En memorias del 9° Congreso Iberoamericano de
Ingeniería Mecánica (cibim9), ISBN 978-84-692-8516-9, pp 149- 156, Palma de Mallorca, España.
28. J. Alfonso Pámanes, J. Víctor Nuñez, J. Antonio Guzmán (2009). Un nuevo enfoque sobre la cinemática
inversa de robots bípedos y su aplicación al robot bioloid. En memorias del 9° Congreso Iberoamericano de
Ingeniería Mecánica (cibim9), ISBN 978-84-692-8516-9, pp. 157-164, Palma de Mallorca, España.
29. V. Nunez, L-I. Olvera, J-A. Pamanes (-). Simulation and experimentation of walking of the bioloid
humanoid robot. Aceptado para publicarse en el 13th World congress in mechanism and machine science.
(IFToMM), a celebrarse en Guanajuato, México en junio de 2011.
Objetivos y metas
Los objetivos y metas de este proyecto de investigación se detallan a continuación
Objetivo general:
Dotar a los robots humanoides que se tienen en el PIM de la UPSin de modos de locomoción interesantes desde un punto de vista energético a través de la comprensión y del
Pg. 6 de 8

9
Caminado energético para robots humanoides
dominio de los principios que regulan la marcha de los mecanismos caminantes pasivos y semipasivos.
Objetivos específicos
Comprender y dominar los conceptos que están detrás del caminado de los seres humanos a través del estudio del movimiento de maquinas caminantes sencillas.
Aplicar este conocimiento a robots humanoides con estructuras mecatrónicas complejas.
Lograr un caminado rápido y que economice baterías para los robots humanoides.
Validar experimentalmente esta metodología en los robots humanoides didácticos con los que cuenta el Programa de Ingeniería Mecatrónica (PIM) de la Universidad Politécnica de Sinaloa (UPSin).
Metas
Publicar un artículo en un congreso de nivel nacional, uno más en un congreso a nivel internacional así como un par de artículos en revistas indizadas. Además esperamos generar un material didáctico sobre la robótica humanoide y software de control y experimentación con estos dispositivos.
Metodología
Las actividades propuestas para este proyecto de investigación se detallan a continuación:
a) Primeramente se estudiará el control por moldeo de energía del CGBR para comprender
los principios del caminado natural de este mecanismo, luego se añadirá un grado extra
de libertad en la cadera del robot.
b) La evaluación del desempeño energético del caminado en comparación con el enfoque
de cinemática inversa completará esta parte de nuestra investigación.
c) Enseguida será necesario monitorear y controlar de forma robusta los 18 motores
Dynamixel que energizan al robot. Para ello un modelo detallado del motor será
realizado.
d) Se diseñará un software de interacción con el robot Bioloid y se analizará la posibilidad
de extenderlo a los robots KHR y KTX.
e) Sera necesario redactar los informes y artículos científicos planteados en las metas de
este proyecto
Cronograma de las actividades Durante este año el cronograma de las actividades que se detallan en el apartado anterior quedaría como sigue:
Pg. 7 de 8

9
Caminado energético para robots humanoides
Actividad Sep. Oct. Nov. Dic. Ene. Feb. Mar. Abr. May. Jun. Jul. Oct.
a
b
c
d
e
Infraestructura disponible
En el PIM de la UPSin, se han adquirido 5 robots humanoides, 3 Bioloid, 1 KH3-3HV y 1 KT-X. El robot Bioloid tiene 18 gdl. motorizados por servomotores dynamixel y mide 30 cm mientras que el KHR-3HV tiene 40 cm de altura y esta articulado por 22 servomotores KRS-2552 HV y el KT-X de la empresa kumotek con 35 cm. Y 17 servomotores VS-S092J para articular sus movimientos.
Se cuenta con espacio de trabajo adecuado, con 2 computadoras de escritorios y una laptop por cada investigador involucrado en el proyecto. Esto se complementa con un laboratorio de electrónica con bancos de experimentación, y mesas de trabajo.
Incidencia del proyecto en el Programa Integral de Fomento Institucional (PIFI)
Se espera que a través de este proyecto de investigación se logre una colaboración con otras universidades donde se estudia el caminado de robots humanoides. Se proyecta realizar convenios con el Departamento de Control Automático del Centro de Investigacion y de estudios Avanzados del Instituto Politecnico Nacional (cinvestav) y con el Laboratorio de Mecatronica y Control del Instituto Tecnológico de la laguna (ITLag).
La aprobación de este proyecto será un apoyo clave para concretar estas colaboraciones y firmar los convenios correspondientes y a mediano plazo, verlos reflejados en la producción científica del cuerpo académico Diseño y Tecnología del PIM de laUPSin. Asimismo la autorización del apoyo para este proyecto nos representara una ayuda para en un futuro consolidar este cuerpo académico y poder asi participar en redes temáticas de colaboración.
Pg. 8 de 8















![Modelado [1]](https://static.fdocumento.com/doc/165x107/555e29d5d8b42a384f8b5355/modelado-1.jpg)