
Proyecto Fin de Carrera - Laboratorio de Ingeniería...
26
ESTUDIO DE UN SISTEMA DE DIRECCIÓN INTEGRAL PARA VEHÍCULOS Proyecto Fin de Carrera UNIVERSIDADE DA CORUÑA Escola Politécnica Superior. Ferrol INGENIERÍA INDUSTRIAL Autor: Daniel Dopico Dopico Tutor: Javier Cuadrado Aranda Marzo 2002
Transcript of Proyecto Fin de Carrera - Laboratorio de Ingeniería...

ESTUDIO DE UN SISTEMA DE DIRECCIÓNINTEGRAL PARA VEHÍCULOS
Proyecto Fin de Carrera
UNIVERSIDADE DA CORUÑAEscola Politécnica Superior. Ferrol
INGENIERÍA INDUSTRIAL
Autor: Daniel Dopico DopicoTutor: Javier Cuadrado Aranda
Marzo 2002
ORIGEN DEL ESTUDIO
• Inventor: Encargo al CIS-Ferrol de estudio de patente de SDI
• CIS-Ferrol: Contacto con Laboratorio de Ingeniería Mecánica de la UDC
• LIM: Solicitud de Proyecto Xunta de GaliciaImporte: 10.000.000 ptasInvestigador Principal: Javier CuadradoProyecto en colaboración con CIS-FerrolDuración: Enero 1999, Diciembre 2000

ANTECEDENTES
• Revisión bibliográfica: SAE, MAZDA, etc• Patentes• SDI actuales son sistemas que actúan las ruedas
traseras de modo hidráulico, controladas electrónicamente.
• Sistemas electrónico-hidráulicos son muy versátiles
• Sistemas completamente mecánicos más robustos pero menos versátiles
PARTES DEL PROYECTO
• ESTUDIO DE LA PATENTE– Defectos encontrados– Soluciones aportadas
• SIMULACIÓN CINEMÁTICA DEL SDI– Visualización del mecanismo en movimiento
• SIMULACIÓN DINÁMICA DEL SDI– Implementación en un vehículo virtual– Simulación por ordenador del comportamiento
del vehículo

68
5
7
9
15
11
10
22
3
4
11
12
16
17
PATENTE ORIGINAL
68
5
7
9
15
11
10
22
3
4
11
12
16
17 68
5
7
9
15
11
10
22
3
11
12
16
17
4
DESCRIPCIÓN DE LA
PATENTE

ESTUDIO Y MEJORA DE LA PATENTE
• CABLES:– Solución ineficaz– Defectos cinemáticos
• Dentados sobrantes• Problemas en el diseño de la cadena de
dirección trasera:– Condición de no-deslizamiento

ESTUDIO Y MEJORA DE LA PATENTE
• Parte delantera:– Defecto cinemático– Mecanismo inválido.

ESTUDIO Y MEJORA DE LA PATENTE
• Parte trasera– Mecanismo con cero
grados de libertad– Criterio de Grübler
( ) ( )
IIclasedepares:pIclasedepares:p
fijoelincluidoelementosnº:n0222133213
II
I
=−⋅−−=−−−= III ppnG

ESTUDIO Y MEJORA DE LA
PATENTE
B2 B3
C1
D1E1
E2
E3
E4
D2
C2
D2
D1
T1
ϕ1
desconectado
mismosentido
sentidosopuestosSOLUCIÓN
PROPUESTA
C1
D1E1
E2
E3
E4
D2
C2
D2
D1
T1
ϕ1
desconectado
mismosentido
sentidosopuestos
ϕ5
C1
D1E1
E2
E3
E4
D2
C2
D2
D1
T1
ϕ1
desconectado
mismosentido
sentidosopuestos
ϕ5

ESTUDIO Y MEJORA DE LA PATENTE
43
1 2
η1
ξ1
L
D
d
Condición de no-deslizamientoen vehículo convencional
1
11
tg1
tgtgη
ηξ
Ld
+=

ESTUDIO Y MEJORA DE LA PATENTE
2η1
ξ1
L
D
d
4
1
χ 1 κ 1
L 1L 2
3
Condición de no-deslizamiento en posición sentidos opuestos
( ) ( )
( )( )
( )( )11
11
11
11
111
tgtg1
tgtg3
tgtg1
tgtg2
1
ηχ
χκ
χη
ηξ
ηχχ
+⋅+=
+⋅+=
=
Ld
Ld
( ) ( ) ( )11 tgtg1 ηχ ⋅= k
( )( )
( )( ) 1
11
1
11
tg11
tgtg3
tg11
tgtg2
η
ηκ
η
ηξ
⋅+⋅+
⋅=
⋅+⋅+=
kLd
k
kLd( )
( )
( ) ( ) ( )11
1
11
tgtg3
tg11
tgtg2
ξκ
η
ηξ
⋅=
⋅+⋅+=
k
kLd

ESTUDIO Y MEJORA DE LA PATENTE
2η2
ξ2
L
D
d
4
1
χ2
κ2
L 2
L 1
3
Condición de no-deslizamiento en posición mismo sentido
( ) ( )
( )( )
( )( )22
22
22
22
222
tgtg1
tgtg3
tgtg1
tgtg2
1
χη
χκ
χη
ηξ
ηχχ
−⋅+=
−⋅+=
=
Ld
Ld
( ) ( ) ( )22 tgtg1 ηχ ⋅= k
( )( )
( )( ) 2
22
2
22
tg11
tgtg3
tg11
tgtg2
η
ηκ
η
ηξ
⋅−⋅+
⋅=
⋅−⋅+=
kLd
k
kLd( )
( )
( ) ( ) ( )22
2
22
tgtg3
tg11
tgtg2
ξκ
η
ηξ
⋅=
⋅−⋅+=
k
kLd
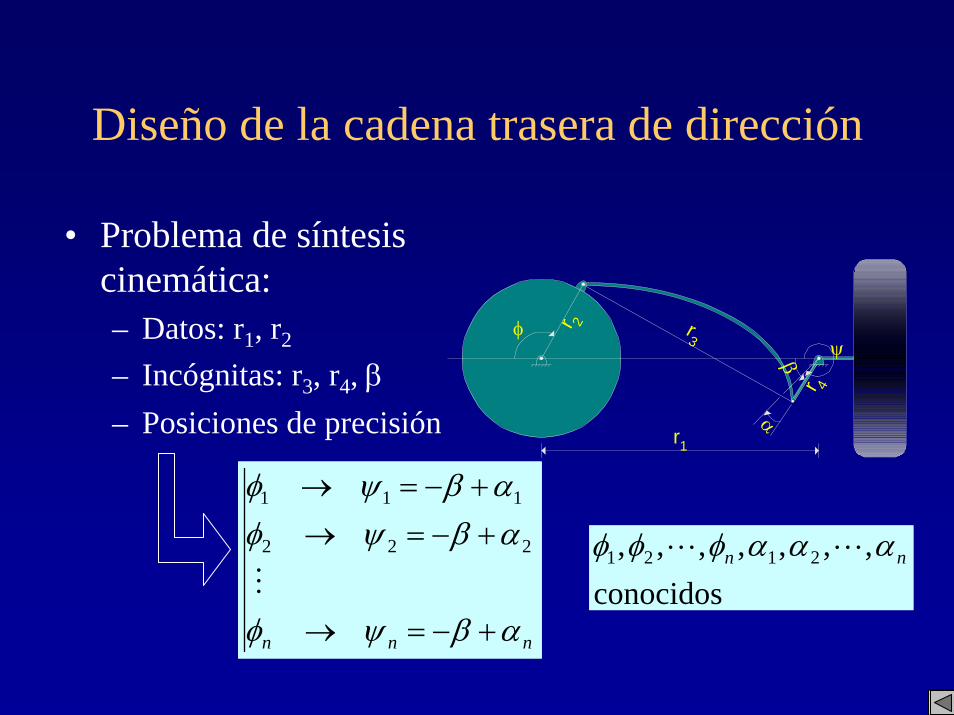
Diseño de la cadena trasera de dirección
• Problema de síntesis cinemática:– Datos: r1, r2
– Incógnitas: r3, r4, β
r 2
r 4
r3φ
r1
βα
ψ
nnn αβψφ
αβψφαβψφ
+−=→
+−=→+−=→
M222
111
– Posiciones de precisión
conocidos,,,,,,, 2121 nn αααφφφ LL

Diseño de la cadena trasera de dirección
( )[ ] ( )[ ]
( )[ ]
( )[ ]
( )[ ] ( ) ( )[ ]{ }⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⋅−−⋅−+⋅−−⋅⋅
−+⋅−
−+⋅−
+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
−−⋅⋅−−⋅
∑
∑
∑
∑∑
∑
∑∑
=
=
=
==
=
==
000
sensencossensencos
coscos
coscoscos
sensencossensen
cos
coscos
1222
12
12
3
1
12
12
1
11
2
n
iiiiiiiiii
n
iiii
n
iiiii
n
iiii
n
iiiii
n
ii
n
ii
n
ii
kkk
k
k
kk
kk
n
ψψφψφψψφψ
ψφψ
ψφψφ
ψφψφψφψ
φ
φφ( )( )( )
42
24
23
22
21
34
11
3
3
3
1
3
2
3
2
1
2
1
3
1
1
1
3
2
11
3
1
1
3
1
313
312
311
2;
fff
fff
fff
siendo
fff
0,,f0,,f0,,f
rrrrrrk
rrk
kk
kk
kk
kk
kk
kkkkkk
iii
⋅+−+
==
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⇒
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
===
−
+
β
β
β
βββββ
i
i
J
J
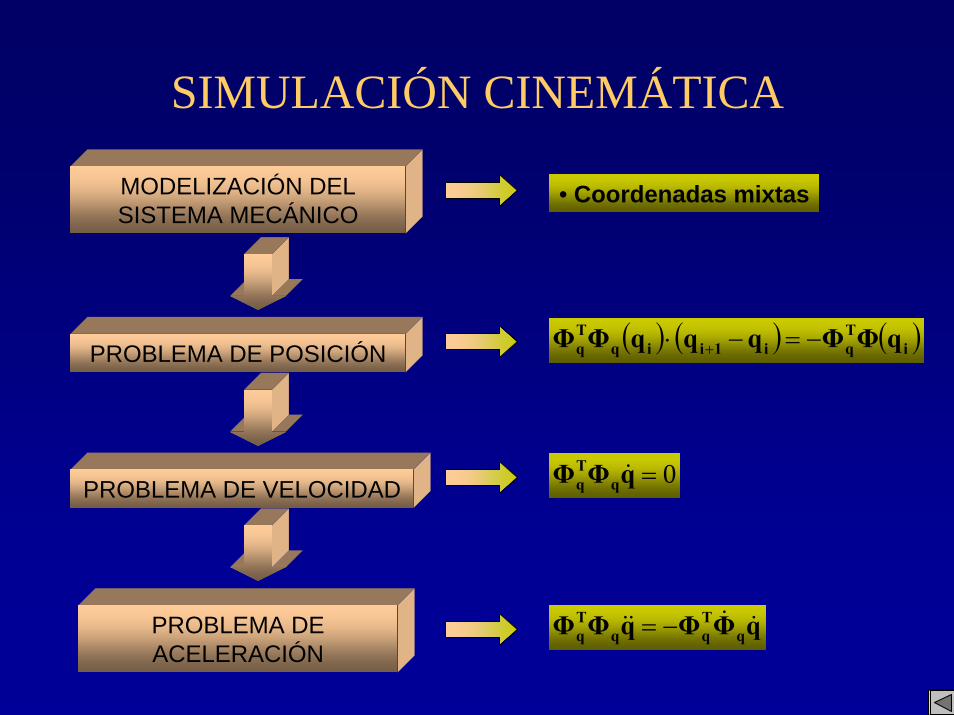
SIMULACIÓN CINEMÁTICA
MODELIZACIÓN DEL SISTEMA MECÁNICO
• Coordenadas mixtas
PROBLEMA DE VELOCIDAD
PROBLEMA DE POSICIÓN
PROBLEMA DE ACELERACIÓN
qΦΦqΦΦ qTqq
Tq &&&& −=
( ) ( ) ( )iTqi1iiq
Tq qΦΦqqqΦΦ −=−⋅ +
0=qΦΦ qTq &

SIMULACIÓN CINEMÁTICA
[ ][ ] 1−−−= v2v1p1p2v2v1p1p2A

SIMULACIÓN CINEMÁTICA
VIDEO CINEMÁTICO

SIMULACIÓN DINÁMICA
SIMULACIÓN DINÁMICA
Obtener el movimiento del sistema conocidas las fuerzas que actúan sobre él
Predecir el comportamiento del sistema (vehículo) a lo largo del tiempo, sin necesidad de construir un prototipo

Ecuaciones de la dinámicaEcs. LAGRANGE en
coordenadas dependientes:Sistema de ecs.diferenciales-
algebraicas (DAE) 0=
=+
Φ
QλΦqM qt&&
Sistema de ecuaciones diferenciales ordinarias
(ODE)
Formulación dinámica
⎟⎠⎞
⎜⎝⎛ +
Δ+
Δ−=+
Δ=
⎟⎠⎞
⎜⎝⎛ +Δ
−=+Δ
=
++
++
nnnnnnn
nnnnnn
ttt
tt
qqqqqqq
qqqqqq
&&&&&&&&&
&&&&
44ˆconˆ4
2ˆconˆ2
2121
11
Regla trapezoidal implícita de paso simple
Integración numérica
1**
1
*
++ +=
=++
iii
tt
Φλλ
QλΦΦΦqM qq
α
α&&
Lagrange aumentado con proyecciones de velocidades y aceleraciones

SIMULACIÓN DINÁMICA
[ ][ ] 1−−−= v2v1p1p2v2v1p1p2A
Maniobras realizadas
Cambio de sentido
Aparcamiento
Maniobras a baja velocidad: Mejoras en la maniobrabilidad

Maniobras realizadas
Curva rápida (60 km/h)
Maniobras a gran velocidad: Mejoras en el comportamiento
Rotonda (75 km/h)

Herramientas Informáticas
• Rutinas de cálculo implementadas en FORTRAN
• Modelización de sólidos en I-DEAS
• Salida gráfica: Utilización de la librería gráfica OPEN INVENTOR v2. Programación en C++

Publicaciones derivadas
• CEIG 2001– TÍTULO: Estudio de un Sistema Mecánico de Dirección Integral
para Vehículos Todoterreno– REFERENCIA: Actas del congreso, pp. 337-340– LUGAR: Gerona, España. AÑO: Jul 2001
• Artículo enviado a revista internacional– TÍTULO: A Fully Mechanical Rear Axle Steering System for
Ground Vehicles– REVISTA: Vehicle System Dynamics
• Artículo enviado a XV Congreso Nacional de Ingeniería Mecánica (a celebrar):– TÍTULO: Sistema Mecánico de Dirección Integral para Vehículos– LUGAR: Cadiz, España. AÑO. Dic.2002
Publicaciones derivadas

Conclusiones• Se ha conseguido que funcione y se ha mejorado el
mecanismo. Mecanismo que funciona y es robusto• Se ha realizado la simulación cinemática que permite ver el
funcionamiento del mecanismo• Se ha realizado la simulación dinámica que permite ver las
ventajas del sistema. Se distinguen:– Maniobras a baja velocidad: Relaciones de giro elevadas en las
ruedas traseras. Giro a sentidos opuestos o mismo sentido– Maniobras a alta velocidad: Relaciones de giro pequeñas para las
ruedas traseras. Giro a mismo sentido
• Jugando con los engranajes se puede conseguir un mecanismo que compita en versatilidad con los electrónico-hidráulicos.


















