Resumen - Equilibrio
5
[AYUDANTÍA DE ESTÁTICA EQUILIBRIO DE CUERPOS RIGIDOS] Prof: Cristobal Paul Ayud: Carlos Aránguiz UNIVERSIDAD DIEGO PORTALES Página 1 EQUILIBRIO DE CUERPOS RIGIDOS INTRODUCCIÓN Un cuerpo rígido es un ente físico idealizado con cierta masa, posición y dimensiones, el cual no sufre deformaciones por efectos de fuerzas externas. Para que un cuerpo rígido pueda estar en equilibrio se deben cumplir las siguientes condiciones: ܨሬ ሬ ሬ =0 ݑݐݎ ݑݖݎ ݏݑ ݎ ܯሬ ሬ =0 ݑݐݎ ݐ ݏݑ ݎ ( ݑݑݍ ݎݑݐ) * Estas condiciones deben cumplirse en toda dimensión en que el cuerpo se encuentre. Si consideramos el cuerpo como una partícula en movimiento esta tiene 6 formas de moverse en el espacio (3D) y 3 formas de moverse dentro de un plano (2D). Las posibilidades de movimiento que tiene una partícula las denominaremos grados de libertad. X Y Z X Y 3D 2D 6 GDL 3 grados de libertad de traslación 3 grados de libertad de rotación 3 GDL 2 grados de libertad de traslación 1 grado de libertad de rotación
-
Upload
aragon-vikingo -
Category
Documents
-
view
11 -
download
0
description
ingenieria civil
Transcript of Resumen - Equilibrio

[AYUDANTÍA DE ESTÁTICAEQUILIBRIO DE CUERPOS RIGIDOS]
Prof: Cristobal PaulAyud: Carlos Aránguiz
UNIVERSIDAD DIEGO PORTALES Página 1
EQUILIBRIO DE CUERPOS RIGIDOS
INTRODUCCIÓN
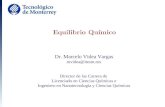
Un cuerpo rígido es un ente físico idealizado con cierta masa, posición y dimensiones, el cual no sufre deformaciones por efectos de fuerzas externas. Para que un cuerpo rígido pueda estar en equilibrio se deben cumplir las siguientes condiciones:
= 0 = 0 ( )
* Estas condiciones deben cumplirse en toda dimensión en que el cuerpo se encuentre.
Si consideramos el cuerpo como una partícula en movimiento esta tiene 6 formas de moverse en el espacio (3D) y 3 formas de moverse dentro de un plano (2D).
Las posibilidades de movimiento que tiene una partícula las denominaremos grados de libertad.
X
Y
Z
X
Y
3D
2D
6 GDL
3 grados de libertad de traslación
3 grados de libertad de rotación
3 GDL
2 grados de libertad de traslación
1 grado de libertad de rotación

[AYUDANTÍA DE ESTÁTICAEQUILIBRIO DE CUERPOS RIGIDOS]
Prof: Cristobal PaulAyud: Carlos Aránguiz
UNIVERSIDAD DIEGO PORTALES Página 2
REACCIONES EN ESTRUCTURAS
Una reacción, al igual que como lo propuso Newton, plantea que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad, pero de sentido contrario sobre el cuerpo que la produjo. Por lo tanto, las reacciones que presenta nuestra estructura dependen del apoyo que posea nuestro cuerpo. Los apoyos restringen los grados de libertad puntuales de los cuerpos rígidos.
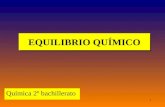
Existen numerosos tipos de apoyos, pero los más comunes son los siguientes:
APOYO ROTULADO:
También conocido como “fijo” o “simple”. Solo restringe los GDL de traslación. (Solo permite el giro)Ry
Rx
APOYO DESLIZANTE:
No generan reacciones de desplazamiento en la dirección de las “ruedas” que posea. (Permite giro y desplazamiento)Ry Ry
APOYO EMPOTRADO:
Restringe desplazamientos y giros del punto de apoyo. No tiene GDL. (A menos que posea un elemento deslizante o rotatorio en algún eje)Ry
Rx
Mz

[AYUDANTÍA DE ESTÁTICAEQUILIBRIO DE CUERPOS RIGIDOS
UNIVERSIDAD DIEGO PORTALES
RIGIDOS]Prof: Cristobal PaulAyud: Carlos Aránguiz
UNIVERSIDAD DIEGO PORTALES
TIPOS DE APOYO
Prof: Cristobal PaulCarlos Aránguiz
Página 3

[AYUDANTÍA DE ESTÁTICAEQUILIBRIO DE CUERPOS RIGIDOS]
Prof: Cristobal PaulAyud: Carlos Aránguiz
UNIVERSIDAD DIEGO PORTALES Página 4
GRADOS DE INDETERMINACIÓN
Como se menciona anteriormente, dependiendo del número de dimensiones con que estemos trabajando, se obtiene un cierto número de ecuaciones de equilibrio, las cuales consisten en las sumatorias de fuerzas y momentos en cada eje. Podemos encontrar 6 ecuaciones de equilibrio al trabajar en 3 dimensiones o 3 ecuaciones de equilibrio al trabajar en 2 dimensiones (asociadas a los GDL totales en cada dimensión).
Ecuaciones al trabajar en 2 Dimensioneso Sumatoria de fuerzas en Xo Sumatoria de fuerzas en Yo Sumatoria de momentos en el eje Z (respecto a un punto).
Ecuaciones al trabajar en 3 Dimensioneso Sumatoria de fuerzas en Xo Sumatoria de fuerzas en Yo Sumatoria de fuerzas en Zo Sumatoria de momentos en el eje X (respecto a un punto).o Sumatoria de momentos en el eje Y (respecto a un punto).o Sumatoria de momentos en el eje Z (respecto a un punto).
Si denotamos el número de ecuaciones disponibles como Q y el número de reacciones incógnitas como R, tendríamos la siguiente clasificación de estructuras:
R < Q Mecanismo (inestable externamente)
R = Q Estructura Isostática (estáticamente determinada)
R > Q Estructura Hiperestática (estáticamente indeterminada)
Para este curso de estática, trabajaremos con estructuras isostáticas.

[AYUDANTÍA DE ESTÁTICAEQUILIBRIO DE CUERPOS RIGIDOS]
Prof: Cristobal PaulAyud: Carlos Aránguiz
UNIVERSIDAD DIEGO PORTALES Página 5
CALCULO DE REACCIONES
Para calcular las reacciones en una estructura isostática, podemos seguir los siguientes pasos:
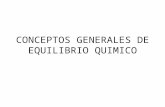
1. Analizar el tipo de apoyo: Revisamos que tipo de apoyo posee la estructura y así estimar las reacciones que posee. Representamos las reacciones como incógnitas dependiendo del tipo de apoyo y los grados de libertad que nos restringe. (no importa el sentido en que estimemos las reacciones, ya que al final se ajusta mediante el signo del resultado).
2. Plantear las ecuaciones: Ya asignadas nuestras incógnitas, procedemos a plantear nuestras ecuaciones de equilibrio dependiendo de las dimensiones con las que estemos trabajando. En este ejemplo estamos trabajando en dos dimensiones, por lo que conocemos 3 ecuaciones de equilibrio. NOTA: Cuando las fuerzas no están en la dirección de los ejes, se deben descomponer en fuerzas que se encuentren en dichas direcciones para facilitar el cálculo.
= → + == → − − , =
= → , ∗ − ∗ − ∗ , =NOTA: El momento se puede realizar con respecto a cualquier punto, ya que la
estructura debe estar en equilibrio en su totalidad. En el ejemplo se realiza en torno al punto A. Buscar el punto más cómodo para trabajar al calcular momentos.
3. Resolver las ecuaciones planteadas: Una vez planteadas las ecuaciones de equilibrio, podemos resolverlas mediante cualquier método de resolución de sistemas de ecuaciones lineales y encontrar nuestras incógnitas. El resultado de estas ecuaciones serán las reacciones que presenta nuestra estructura.
= − , = , = ,
Vemos que la estructura tiene un apoyo rotulado simple y uno
deslizante, por lo tanto, tiene 3 reacciones de traslación (2 en el
punto A y 1 en el punto B)
RayRax
Rbx
Peso estructura = 10 KN
2,4 KN