SCUELA SUPERIOR DE INGENIERÍA ECÁNICA Y ELÉCTRICA
85
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD-ZACATENCO ANÁLISIS Y DISEÑO DE UN MOTOR SÍNCRONO LINEAL COMO MEDIO DE PROPULSIÓN PARA UN TREN DE LEVITACIÓN MAGNÉTICA T E S I S QUE PARA OBTENER EL TITULO DE: INGENIERO ELECTRICISTA P R E S E N T A: ELIUD MORALES ALDANA A S E S O R E S D E T E S I S: Dr. ALFREDO REYES ROSARIO Ing. OSCAR CABALLERO HERNÁNDEZ MÉXICO, DF. Noviembre de 2012
Transcript of SCUELA SUPERIOR DE INGENIERÍA ECÁNICA Y ELÉCTRICA
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
UNIDAD-ZACATENCO
ANÁLISIS Y DISEÑO DE UN MOTOR SÍNCRONO LINEAL
COMO MEDIO DE PROPULSIÓN PARA UN TREN DE
LEVITACIÓN MAGNÉTICA
T E S I S
QUE PARA OBTENER EL TITULO DE:
INGENIERO ELECTRICISTA
P R E S E N T A:
ELIUD MORALES ALDANA
A S E S O R E S D E T E S I S:
Dr. ALFREDO REYES ROSARIO
Ing. OSCAR CABALLERO HERNÁNDEZ
MÉXICO, DF. Noviembre de 2012
i

ii
Dedicatorias
A mis padres…
Por el amor incondicional, enseñanza y muestra de rectitud en cada momento de sus vidas.
A mis hermanos…
Por el apoyo en cada uno de mis pasos aun con nuestras pequeñas o grandes diferencias.
A mi novia…
Por apoyarme en mis decisiones, por entregarme su amor en cada momento de su vida.
A mi amigos…
Por estar a mi lado en los bueno y malos momentos.

iii
Agradecimientos A Dios por prestarme vida y fortaleza para alcanzar cada una de mis metas.
A mis asesores por la enseñanza y apoyo durante el desarrollo de esta tesis, muestra del compromiso y dedicación a la educación.
Al IPN y a la ESIME por ser mi casa a lo largo de mi carrera.

iv
Índice
Tema de tesis. ................................................................................................ ¡Error! Marcador no definido.
Dedicatorias .................................................................................................................................................. ii
Agradecimientos .......................................................................................................................................... iii
Índice ……………………………………………………………………………………………..…………………………………………..…………iv
Lista de tablas. ............................................................................................................................................. vi
Lista de figuras. ........................................................................................................................................... vii
Abreviaturas. ................................................................................................................................................. x
Capítulo 1 Introducción .................................................................................................................... 11
1.1 Justificación. ................................................................................................................................ 11
1.2 Objetivo. ...................................................................................................................................... 12
1.3 Desarrollo del tren Maglev. ........................................................................................................ 12
1.3.1 Sistema terrestre de alta velocidad (High Speed Surface Transport, HSST). ....................... 14
1.3.2 Transrapid. ........................................................................................................................... 18
1.3.3 Ferrocarriles Nacionales de Japón (Japanese National Railways, JNR). .............................. 22
1.3.4 Programa Urbano Maglev de Corea (Urban Maglev Program, UMP). ................................ 27
Capítulo 2 Tecnología Maglev En Trenes ........................................................................................... 29
2.1 Levitación. ................................................................................................................................... 30
2.1.1 Suspensión electromagnética (Electromagnetic Suspension, EMS). ................................... 31
2.1.2 Suspensión electrodinámica (Electrodynamic Suspension, EDS). ....................................... 33
2.1.3 Suspensión electromagnética hibrida (Hybrid Electromagnetic Suspension,
HEMS). ................................................................................................................................. 34
2.2 Propulsión. .................................................................................................................................. 35
2.2.1 Motor de inducción lineal (LIM). ......................................................................................... 37
2.2.2 Motor síncrono lineal (LSM). .............................................................................................. 38
2.3 Orientación. ................................................................................................................................ 39
2.3.1 Fuerza de repulsión magnética. ........................................................................................... 39
2.3.2 Fuerza de atracción magnética ............................................................................................ 40
2.4 Transferencia de energía al vehículo. ......................................................................................... 42
2.4.1 Velocidad de operación Baja y Media. ................................................................................ 42
2.4.2 Velocidad de operación alta. ............................................................................................... 43
Capítulo 3 Análisis Del Motor Síncrono Lineal ................................................................................... 46
3.1 Análisis de campo magnético mediante relaciones de transferencia. ....................................... 47
3.1.1 Solución de la fuente de excitación. .................................................................................... 49
v
3.1.2 Solución de campo por la fuente de corriente trifásica. ..................................................... 50
3.2 Fuerza electromotriz de vuelta y empuje. .................................................................................. 51
Capítulo 4 Diseño Del Motor Síncrono Lineal .................................................................................... 54
4.1 Diseño del motor síncrono lineal. ............................................................................................... 54
4.2 Análisis del campo magnético en las regiones (d) y (e). ...................................................... 57
4.2.1 Cálculo de la densidad de corriente magnetizante de la fuente de excitación
(CD). ..................................................................................................................................... 57
4.2.2 Gráfica de la densidad de flujo de a componente tangencial en el límite (e). .................... 59
4.2.3 Gráfica de la densidad de flujo de a componente normal en el límite (e). ......................... 60
4.2.4 Gráfica de la densidad de flujo de a componente tangencial y normal en el
límite (e). .............................................................................................................................. 60
4.2.5 Cálculo de la densidad de corriente magnetizante de la fuente de corriente
trifásica. ............................................................................................................................... 61
4.2.6 Gráfica de la densidad de flujo de a componente tangencial en el límite (d). .................... 63
4.2.7 Gráfica de la densidad de flujo de a componente normal en el límite (d). ......................... 64
4.2.8 Gráfica de la densidad de flujo de a componente tangencial y normal en el
límite (d). .............................................................................................................................. 64
4.3 Cálculo de la fuerza de tracción. ................................................................................................. 65
4.4 Discusión de resultados. ............................................................................................................. 66
Capítulo 5 Concusiones .................................................................................................................... 69
Recomendaciones Para Trabajos Futuros. .......................................................................................... 72
Referencias. ..................................................................................................................................... 73
Apéndice I. Deducción del vector de potencial magnético en los limites (d) y (e) para la fuente de
corriente directa. ............................................................................................................. 75
Apéndice II. Deducción del vector de potencial magnético en los limites (d) y (e) para la fuente de
corriente trifásica. ............................................................................................................ 79
Apéndice III. Densidad de corriente magnetizante para la fuente de corriente trifásica. ....................... 82

vi
Lista de tablas.
Tabla 2-1. Comparación de los sistemas tren Maglev y tren convencional [4] . ......................................... 30
Tabla 2-2. Comparación de las características de varios sistemas de transporte [4] . ................................. 31
Tabla 4-1. Diseño del motor síncrono lineal. .............................................................................................. 55
Tabla 4-2. Comparación de la densidad de flujo de la componente tangencial y normal en el
límite (e) entre el diseño propuesto y la referencia. ................................................................ 66
Tabla 4-2. Comparación de la densidad de flujo de la componente tangencial y normal en el
límite (d) entre el diseño propuesto y la referencia. ................................................................ 67
vii
Lista de figuras.
Figura 1-1. Vehículo japonés HSST (Nagaike-Takatsuca, 1989) [10] . ........................................................... 14
Figura 1-2. Vehículo de prueba HSST-01, 1975 [9] . ..................................................................................... 15
Figura 1-3. Diseño de los modelos, a) HSST-02 y b) HSST-03 [10] . .............................................................. 15
Figura 1-4. Prueba del vehículo HSST-100L en la ciudad de Nagoya, Japón [9] . ......................................... 17
Figura 1-5. Linimo, recorrido de la línea Tobu-kyuryo [9] . .......................................................................... 17
Figura 1-6. a) Puesta en marcha del Transrapid 02 por Krauss-Maffei. b) Vehículo de prueba
EET 01 [7] . .................................................................................................................................. 18
Figura 1-7. Transrapid 05 [7] . ....................................................................................................................... 19
Figura 1-8. Transrapid 06 [7] . ....................................................................................................................... 20
Figura 1-9. El Transrapid 07 alcanza una velocidad de 436 km/h [7] . ......................................................... 21
Figura 1-10. El Transrapid 08, en la ruta Berlín-Hamburgo, velocidad de 550 km/h [7] . ............................ 21
Figura 1-11. Transrapid 09, pista de prueba en Emsland, Alemania [7] . ..................................................... 22
Figura 1-12. Prueba del vehículo ML-100 [8] . .............................................................................................. 23
Figura 1-13. Prueba del vehículo EML-50 [8] . .............................................................................................. 23
Figura 1-14. Vehículo ML500, obtuvo el record de 517 km/h [9] . ............................................................... 24
Figura 1-15. Vehículo ML500R [10] . ............................................................................................................. 24
Figura 1-16. Vehículo MLU-001, alcanzo la velocidad de 305 km/h [9] . ..................................................... 25
Figura 1-17. Diseño comercial del vehículo MLU-002 [9] . ........................................................................... 26
Figura 1-18. Tren Maglev MLX01, Pista de prueba Yamanashi [11] . ............................................................ 26
Figura 1-19. Vehículo UTM-01 [12] . .............................................................................................................. 27
Figura 1-20. Vehículo UTM-02, Circulando en la vía expo parque al museo nacional de
ciencias en Daejon [12] . .............................................................................................................. 28
Figura 2-1. Suspensión electromagnética, a) levitación y orientación integrada, b) levitación
y orientación separada [4] . ........................................................................................................ 32
Figura 2-2. Suspensión electrodinámica, a) con imanes permanentes, b) con imanes
superconductores [4] . ................................................................................................................ 33
Figura 2-3. La cancelación de componentes magnéticos que resulta en un flujo de un solo
lado [18] . ..................................................................................................................................... 34
Figura 2-4. Suspensión electromagnética hibrida [4] . ................................................................................. 35
Figura 2-5. Concepto del motor lineal derivado del motor rotativo [9] . ..................................................... 36
Figura 2-6. Motor lineal de inducción tipo LP [4] ......................................................................................... 37

viii
Figura 2-7. Motor lineal síncrono tipo LP [4] . .............................................................................................. 38
Figura 2-8. Propulsión-bobinas de orientación usada en el japonés MLU-002 [4] . ..................................... 40
Figura 2-9. Levitación-bobinas de orientación usada en el japonés MLX [4] . ............................................. 40
Figura 2-10. Transrapid [4] . .......................................................................................................................... 41
Figura 2-11. HSST [9] . ................................................................................................................................... 42
Figura 2-12. Pantógrafo. ............................................................................................................................. 43
Figura 2-13. LSM diseño del Transrapid, (Generador lineal se integra en la levitación
electromagnética) [4] . ................................................................................................................ 44
Figura 2-14. Dos tipos de generadores lineales usados en el MLX. a) tipo concentrado. b)
tipo distribuido [4] . .................................................................................................................... 45
Figura 3-1. Esquema de un motor lineal síncrono de estator corto [1] . ...................................................... 47
Figura 3-2. Esquema de las tres regiones de análisis del motor lineal síncrono [1] . ................................... 48
Figura 4-1. Diseño del motor lineal síncrono, donde se representan las regiones del motor.
Escala 1cm:0.15m. .................................................................................................................... 56
Figura 4-2. Programa para calcular la densidad de corriente magnetizante la fuente de CD. ................... 57
Figura 4-3. Establecimiento de las condiciones de contorno en la fuente de CD. ..................................... 57
Figura 4-4. Programa para calcular el vector de potencial magnético en los limites (d) y (e). .................. 58
Figura 4-5. Solución general del vector del vector de potencial magnético en los limites (d) y
(e). ............................................................................................................................................. 58
Figura 4-6. Cálculo de las densidades de flujo tangencial y normal en el límite (e). .................................. 58
Figura 4-7. Datos del motor. ....................................................................................................................... 59
Figura 4-8. Gráfica de a densidad de flujo de la componente tangencia en el límite (e). .......................... 59
Figura 4-9. Gráfica de la densidad de flujo de la componente normal en el límite (e). ............................. 60
Figura 4-10. Gráfica de las densidades de flujo de a componente norma y tangencial. ............................ 61
Figura 4-11. Cálculo de la densidad de corriente magnetizante de a fuente trifásica. .............................. 61
Figura 4-12. Establecimiento de las condiciones de contorno de la fuente de corriente
trifásica. ..................................................................................................................................... 62
Figura 4-13. Cálculo del vector de potencial magnético en os límites (d) y (e). ........................................ 62
Figura 4-14. Solución general del vector de potencial magnético en los límites (d) y (e). ......................... 62
Figura 4-15. Calculo de las densidades de flujo tangencial y normal en el límite (d). ................................ 62
Figura 4-16. Datos del motor. ..................................................................................................................... 63
Figura 4-17. Gráfica de la densidad de flujo de la componente tangencial en el límite (d). ..................... 63
ix
Figura 4-18. Gráfica de la densidad de la componente normal en el límite (d). ........................................ 64
Figura 4-19. Gráfica de la densidad de flujo normal y tangencial en el límite (d). ..................................... 65
Figura 4-20. Cálculo de la fuerza de tracción. ............................................................................................. 66
Figura III-1. Determinación de la grafica resultante de la densidad equivalente de la
corriente magnetizante de la fuente trifásica. ......................................................................... 82

x
Abreviaturas.
Maglev......... Levitación magnética.
LSM…......... Motor síncrono lineal .
EMF…........ Fuerza electromagnética.
CA………… Corriente alterna.
HSST……... Sistema terrestre de alta velocidad
JAL……..… Japan Airlines
Transrapid.. Tren alemán de tecnología de levitación magnética.
MBB……… Messerschmitt Bölkow Blohm
JNR.............. Ferrocarriles nacionales de Japón.
TGV………. Train à Grande Vitesse (Tren de Gran Velocidad)
UMP……… Urban Maglev Program (Programa Urbano de levitación magnética)
KIMM……. Korea Institute of Machinery and Materials (Instituto Coreano de Maquinaria y
Materiales)
EMS…......... Suspensión electromagnética.
EDS……….. Suspensión electrodinámica.
HEMS…….. Suspensión electromagnética híbrida.
UTM…........ Urban Transit Maglev (Transporte urbano Maglev)
HSST……... High Speed Surface Transport (Transporte terrestre de alta velocidad).
PM………... Imán permanente.
SCM…........ Imán superconductor.
HTS………. Superconductor de alta temperatura.
LIM………. Motor lineal asíncrono o de inducción.

11
Capítulo 1 Introducción
En este capítulo se plantea la idea y el concepto de la levitación magnética, la importancia, las
ventajas y el objetivo principal. Se habla del desarrollo de la levitación magnética, de quienes
fueron los personajes que más aportaron a su desarrollo así como de sus experimentos y los
descubrimientos que lograron con sus trabajos. Se describen los programas de levitación
magnética más importantes, desde sus inicios hasta sus grandes y exitosos prototipos que se han
desarrollado a lo largo de los años.
1.1 Justificación.
Los trenes de levitación magnética (Maglev) son una de las grandes tecnologías que se han
desarrollado como futuros medios de transporte terrestre, esto debido a los grandes problemas de
tránsito vehicular y aéreo que se ocasionan con los medios de transporte actuales, estos pueden
ser sustituidos por trenes Maglev, ya que cumplen con características como sus altos niveles de
seguridad y la gran velocidad que se puede alcanzar con este tipo de trenes, sin necesidad de
12
tener contacto mecánico, lo cual nos permite un ahorro de energía y de mantenimiento debido a
que se elimina el desgate de rueda y pista, esto favorece en la reducción de costos con relación a
los trenes convencionales a demás que es menos susceptible a las condiciones climáticas. En los
trenes Maglev son necesarios dos sistemas principales: levitación y propulsión. Para la levitación
existen varias tecnologías, la electromagnética, la electrodinámica y la combinación de ambas
creando un sistema hibrido. Para el sistema de propulsión se emplea un motor lineal, ya sea
síncrono o asíncrono, con primario corto como medio de propulsión de alta velocidad debido a
su alta eficiencia, alto factor de potencia y alta precisión posicional [1]
.
1.2 Objetivo.
El objetivo principal es analizar y realizar un diseño analítico del motor síncrono lineal de estator
corto por medio de electroimanes de núcleo de hierro, como alternativa para ser utilizado como
medio de propulsión en trenes Maglev de alta velocidad. Para alcanzar el objetivo planteado, se
llevo a cabo el análisis del comportamiento del campo magnético y de la fuerza de tracción al
igual que las dimensiones y la estructura de los electroimanes de núcleo de hierro.
1.3 Desarrollo del tren Maglev.
Las investigaciones acerca del tren de levitación magnética iniciaron aproximadamente hace más
de un siglo comenzando con el desarrollo del motor lineal para la tracción. En 1905 se creó un
sistema de tracción tangencial el cual fue patentado en Bélgica; tal sistema resultó claramente
costoso, como sería cualquier sistema con segmento principal (estator) prolongado [2]
, pero tal
vez el comienzo fue en 1914, cuando Michelle Bachelet, un inventor francés, tuvo la idea de
utilizar bobinas de CA para la levitación y propulsión, las notables ideas de Michelle Bachelet
impresionaron a Winston Churchill, pero la falta de apoyo económico al desarrollo tecnológico y
la sociedad hicieron que fracasara como empresario [3]
.
Aunque el tren Maglev fue patentado hasta agosto de 1934 por el ingeniero alemán Hermann
Kemper [4]
, Kemper comenzó su investigación sobre la levitación magnética en 1922. En 1933,
después de trabajar durante unos 10 años, tuvo éxito en la creación de un concepto técnico de un
vehículo de levitación basado en el principio de atracción electromagnética. Él solicitó la patente

13
en Berlín, la cual recibió bajo el número 643316. La patente describe su invento como un
“vehículo monorriel sin ruedas unidas”. Esto significa un vehículo flotante sobre la base de
levitación utilizando electroimanes en la pista. Sus inventos condujeron a importantes
investigaciones sobre la tecnología de levitación magnética en otros países. Esto llevó a las bases
de los modelos a gran escala, tales como el sistema del Transrapid en Alemania y en el coche de
motor lineal en Japón. Estos dos modelos utilizan tecnologías diferentes, pero se basan en un
principio básico de atracción y repulsión de los campos magnéticos, por todas las aportaciones
que realizó Kemper se le atribuyó el sobrenombre de “erudito de la levitación magnética” [5]
.
Eric Roberts Laithwaite, ingeniero británico, conocido como el “padre de levitación magnética”
por su desarrollo del motor lineal de inducción y de levitación magnética del sistema ferroviario.
A fines de 1940, el profesor Eric Laithwaite del Imperial College de Londres desarrolló el primer
trabajo del modelo completo del motor de inducción lineal.
En la década de 1950 fue cuando la Maglev tuvo un comienzo real, llegando así a un periodo de
aceleración en la década de 1960, cuando el profesor Laithwaite se convirtió en profesor de
ingeniería eléctrica de potencia en el Imperial College en 1964, donde continuó su desarrollo con
éxito del motor lineal.
Dado que el motor lineal no requiere contacto físico entre el vehículo y de la guía, se convirtió
en un complemento tecnológico común en muchas economías avanzadas con sistemas de
transporte que se desarrollaron en las décadas de 1960 y 1970. Laithwaite se unió el desarrollo
de un proyecto de este tipo, el aerodeslizador de cadenas, aunque la financiación para este
proyecto fue cancelado en 1973. El motor lineal se adapta de forma natural para usarse en
sistemas Maglev. A lo largo de la década de 1970, Laithwaite descubrió un nuevo arreglo de
imanes llamado “ríos magnéticos”, el cual se compone de una placa delgada conductora sobre un
motor lineal de inducción (LIM) de corriente alterna (CA). Debido al flujo transversal y la
geometría, en el río magnético, la placa conductora es de un ancho crítico con respecto a los
imanes que se encuentra abajo de él. Esto da la levitación, la estabilidad y la propulsión, además
de ser relativamente eficiente, lo que permitió un solo motor lineal para poder producir tanto la
levitación, así como el empuje hacia adelante [6]
.

14
1.3.1 Sistema terrestre de alta velocidad (High Speed Surface Transport, HSST).
El programa HSST fue iniciado por la Japan Airlines (JAL) a fines de 1960. Después de varios
estudios, estos revelaron la necesidad de un enlace de alta velocidad entre el nuevo aeropuerto de
Narita y Tokio, a unos 64 km de Tokio (ver Figura 1-1) [10]
.
El programa japonés, HSST, trajo al mercado el concepto de vehículos de levitación, tres
servicios de transporte de pasajeros, urbano (100 km/h), suburbano (200 km/h) y metropolitano
(300 km/h).
Figura 1-1. Vehículo japonés HSST (Nagaike-Takatsuca, 1989) [10]
.
En 1974, La JAL comenzó a diseñar un vehículo de prueba llamada HSST-01 (ver Figura 1-2),
el objetivo era alcanzar una velocidad de 300 km/h. Una pista de pruebas de 1,6 kilómetros fue
construida en Higashiogishima en Kawasaki, donde el vehículo experimental no tripulado HSST-
01 alcanzó una velocidad de 308 km/h, cumpliendo con las expectativas.
En 1978 este vehículo se puso a prueba en una pista de 1,3 km y alcanzó una velocidad de 307,8
km/h. Este atractivo sistema de levitación no superconductora utiliza electroimanes y un carril
ferromagnético con ancho de 1 cm. [9]
.

15
Figura 1-2. Vehículo de prueba HSST-01, 1975 [9]
.
En el año de 1981 la HSST construyó otro modelo llamado HSST-02 y ofreció espacio para dos
personas; el vehículo de prueba alcanzó una velocidad de 110 km/h (como se muestra en la
Figura 1-3, a). HSST-03 una versión de transporte de pasajeros (ver Figura 1-3, a), fue mostrada
en exposiciones en Canadá y Japón. El HSST-03 mide 13.8 m de largo, 3 metros de ancho y pesa
unas 12 t; el vehículo llevó a más de 1 millón de personas a lo largo de una pista corta [10]
.
a) b)
Figura 1-3. Diseño de los modelos, a) HSST-02 y b) HSST-03 [10]
.
Aunque los japoneses continuaron con el programa HSST construyendo varios modelos de
prueba como el HSST-04 y el HSST-05, el cual era el primer vehículo de dos piezas y fue

16
construido en 1989. El HSST-05 midió 36.3 m de largo, 3 m de ancho, pesaba 40 t. y viajaba a
una velocidad 45km/h.
El diseño básico del sistema HSST era destinado para velocidades de aproximadamente 200
km/h, incluyendo al HSST-05. Sin embargo, el enfoque cambió en 1987 cuando se inició un
proyecto para desarrollar el HSST para el transporte urbano. Hasta entonces, las investigaciones
habían determinado sólo la especificación técnica básica que se requería para poder hacer un
vehículo, el HSST-100.
En el marco del nuevo proyecto, una pista de prueba y los vehículos fueron construidos y se
llevaron a cabo las ejecuciones de pruebas. El objetivo era determinar la viabilidad de tal sistema
para el transporte masivo. La evaluación examinó varios factores, incluyendo la seguridad,
fiabilidad y costo [9]
.
El sector privado, Nagoya Railroad Co. Group en la prefectura de Aichi, encabezó el proyecto.
Después que fue establecida la Corporación de Desarrollo de Chubu HSST en 1989, se dio a la
tarea de probar y desarrollar el HSST-100 series. Al mismo tiempo, el gobierno de la prefectura
de Aichi estableció un comité que más tarde publicó el informe titulado “Un Estudio de
Factibilidad de Transporte Masivo Urbano Lineal Motorizado Maglev”.
El comité, presidido por el profesor Eisuke Masada, en 1993, informó de que el HSST estaba
suficientemente desarrollado para ser utilizado para el transporte colectivo público. La pista de
ensayo en Chubu, desarrollada por la corporación HSST, es de 1,5 km de largo y se extiende
desde la estación de Oe en la línea de Meitetsu Chikko en la parte sur de la ciudad de Nagoya. La
pista es elevada, a excepción de unos 400 metros a nivel del suelo. Para probar las operaciones
en virtud de tales condiciones extremas, que incluye una pendiente pronunciada y curvas
cerradas. Los vehículo de prueba fueron los coches HSST-100S y HSST-100L, construidos en
1991 y 1995, respectivamente [9]
.
Después de realizar pruebas con los vehículos de la serie 100, se inicio la construcción del
vehículo Linimo, el cual es la primera aplicación comercial del HSST y además se creó para la
Expo 2005. El sistema comercial automatizado “Urban Maglev” comenzó a funcionar en marzo
de 2005 en Aichi , Japón. La línea Tobu-kyuryo de 9 km de largo, también conocida como la
Linimo.
17
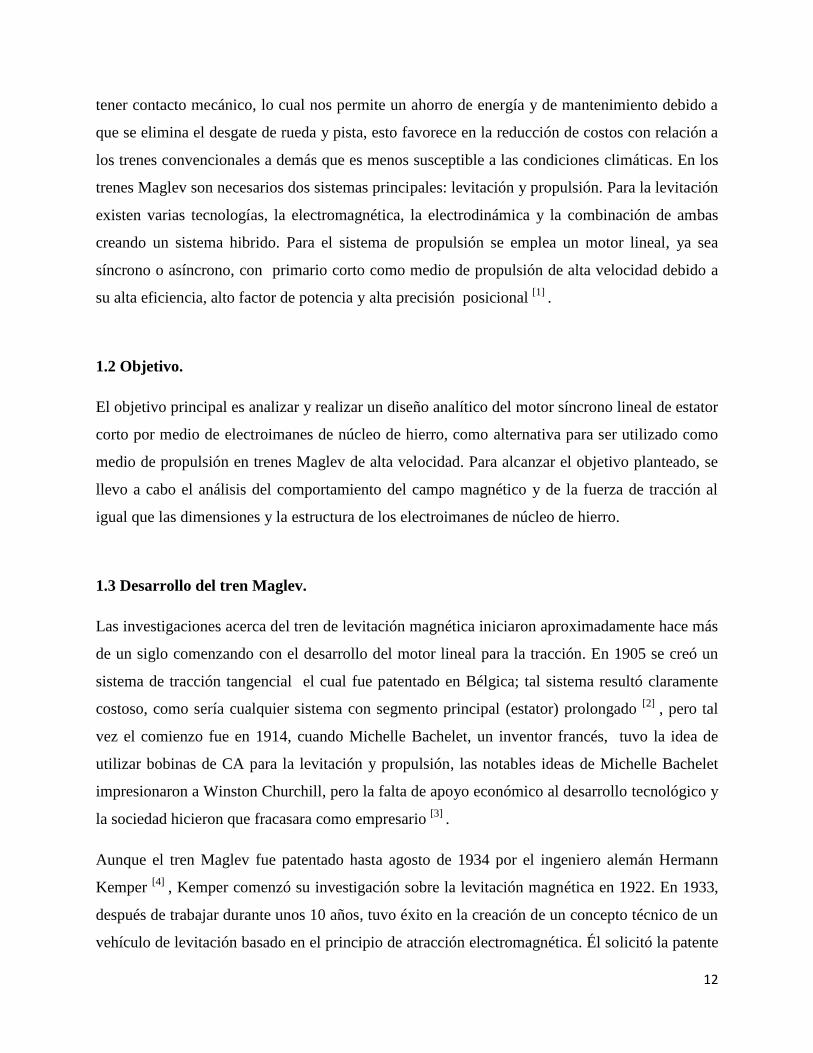
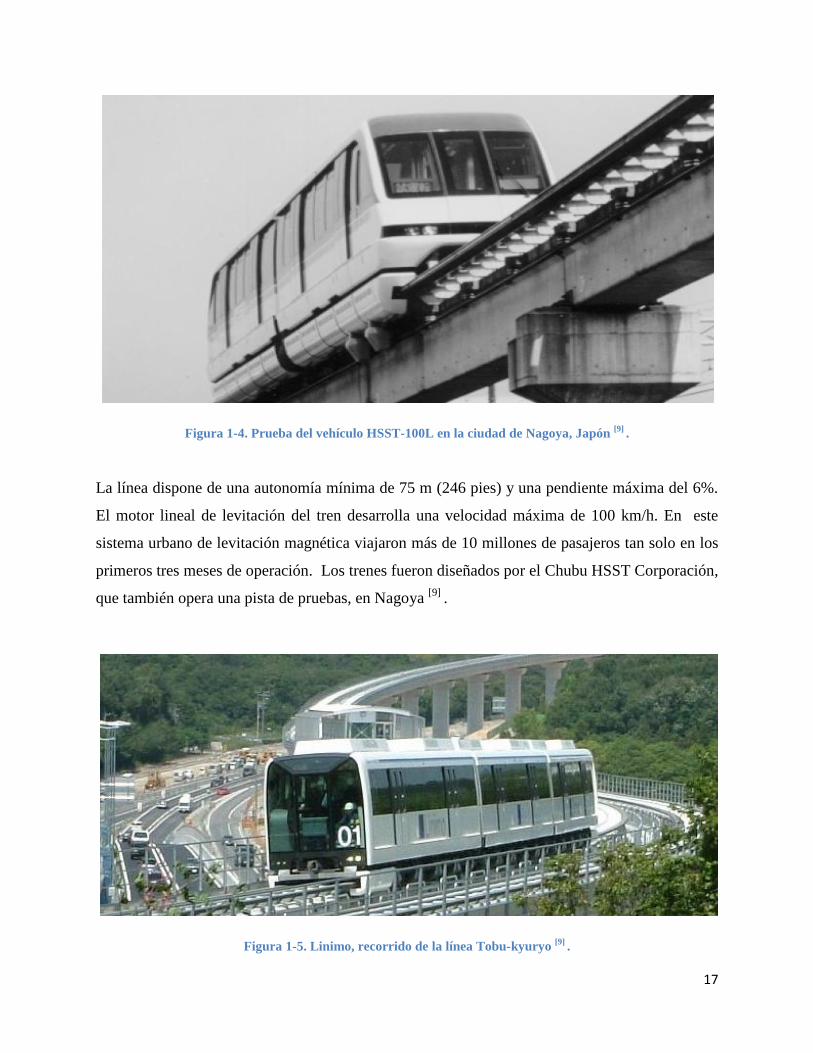
Figura 1-4. Prueba del vehículo HSST-100L en la ciudad de Nagoya, Japón [9]
.
La línea dispone de una autonomía mínima de 75 m (246 pies) y una pendiente máxima del 6%.
El motor lineal de levitación del tren desarrolla una velocidad máxima de 100 km/h. En este
sistema urbano de levitación magnética viajaron más de 10 millones de pasajeros tan solo en los
primeros tres meses de operación. Los trenes fueron diseñados por el Chubu HSST Corporación,
que también opera una pista de pruebas, en Nagoya [9]
.
Figura 1-5. Linimo, recorrido de la línea Tobu-kyuryo [9]
.
18
1.3.2 Transrapid.
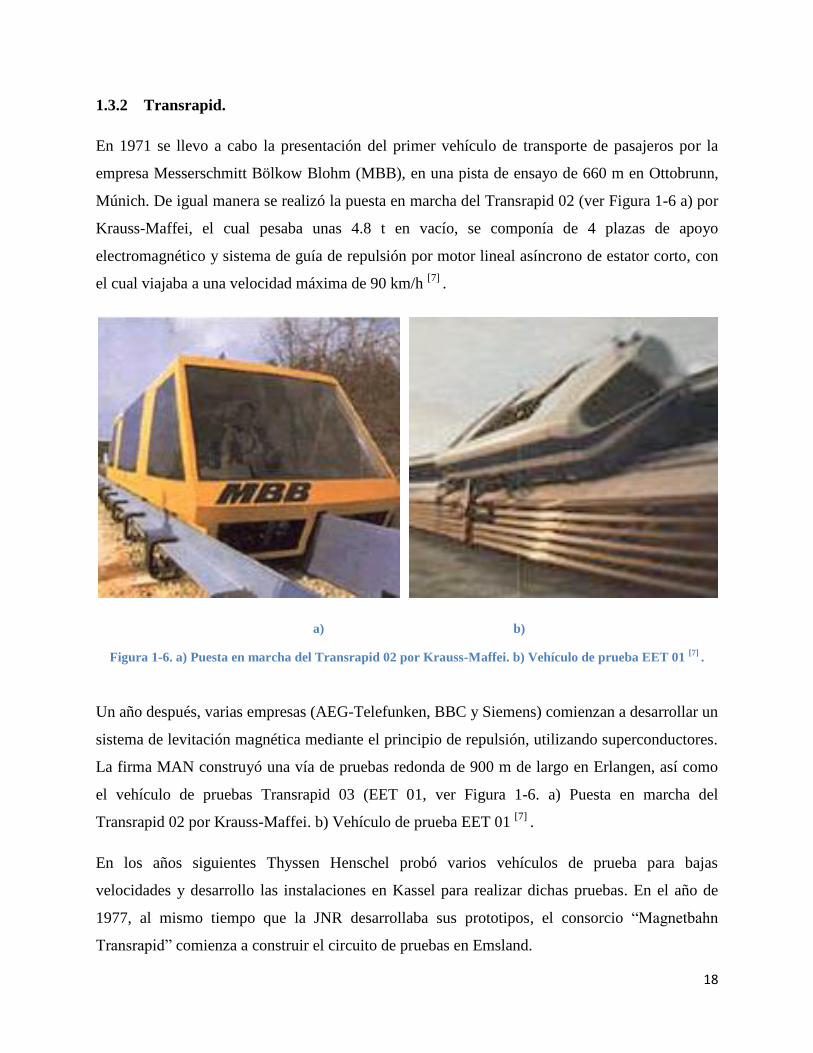
En 1971 se llevo a cabo la presentación del primer vehículo de transporte de pasajeros por la
empresa Messerschmitt Bölkow Blohm (MBB), en una pista de ensayo de 660 m en Ottobrunn,
Múnich. De igual manera se realizó la puesta en marcha del Transrapid 02 (ver Figura 1-6 a) por
Krauss-Maffei, el cual pesaba unas 4.8 t en vacío, se componía de 4 plazas de apoyo
electromagnético y sistema de guía de repulsión por motor lineal asíncrono de estator corto, con
el cual viajaba a una velocidad máxima de 90 km/h [7]
.
a) b)
Figura 1-6. a) Puesta en marcha del Transrapid 02 por Krauss-Maffei. b) Vehículo de prueba EET 01 [7]
.
Un año después, varias empresas (AEG-Telefunken, BBC y Siemens) comienzan a desarrollar un
sistema de levitación magnética mediante el principio de repulsión, utilizando superconductores.
La firma MAN construyó una vía de pruebas redonda de 900 m de largo en Erlangen, así como
el vehículo de pruebas Transrapid 03 (EET 01, ver Figura 1-6. a) Puesta en marcha del
Transrapid 02 por Krauss-Maffei. b) Vehículo de prueba EET 01 [7]
.
En los años siguientes Thyssen Henschel probó varios vehículos de prueba para bajas
velocidades y desarrollo las instalaciones en Kassel para realizar dichas pruebas. En el año de
1977, al mismo tiempo que la JNR desarrollaba sus prototipos, el consorcio “Magnetbahn
Transrapid” comienza a construir el circuito de pruebas en Emsland.

19
En 1979 se hace funcionar el primer tren magnético aprobado para el transporte de viajeros, el
Transrapid 05 (ver Figura 1-7), en la Exhibición Internacional de Transporte (IVA 79) en
Hamburgo. Durante las tres semanas que duró la exposición, el vehículo transportó más de
50.000 pasajeros; este vehículo medía 26 m de longitud con un peso de 30.8 t y contaba con 68
asientos y circulaba en una pista de casi un kilometro a una velocidad de 75 km/h [7]
.
Figura 1-7. Transrapid 05 [7]
.
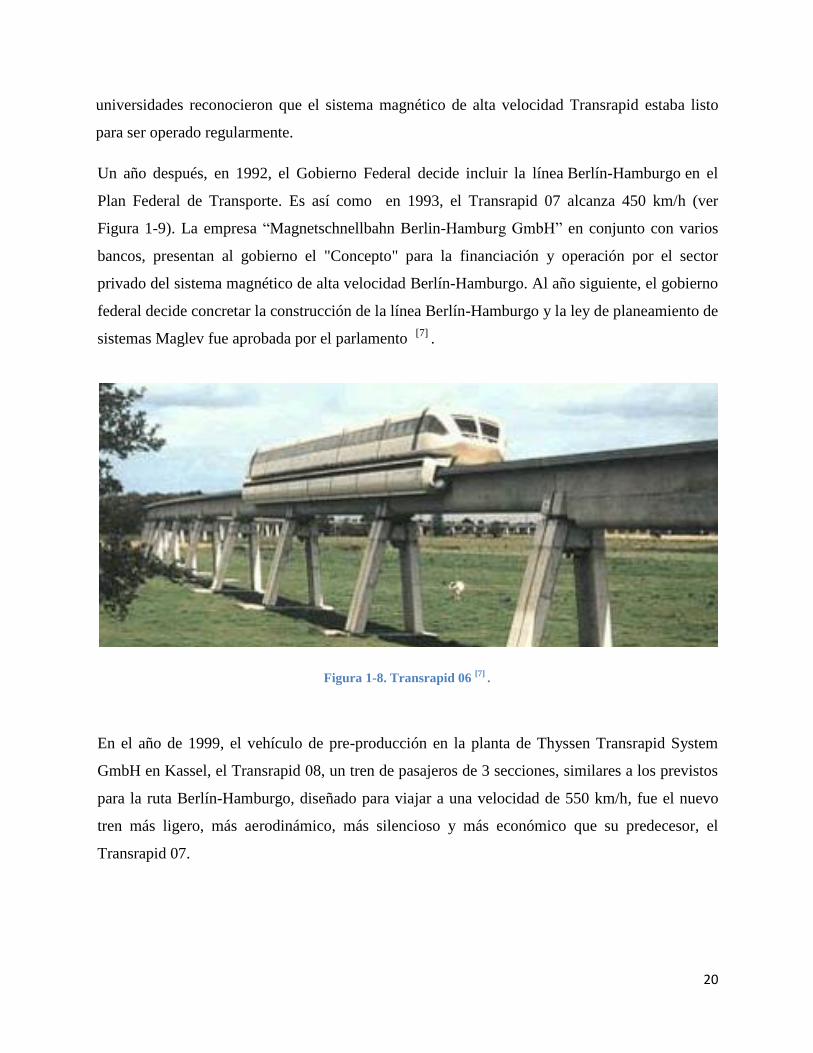
En el año de 1983 se inician las pruebas con el Transrapid 06 (ver Figura 1-8), diseñado para
una velocidad de 400 km/h. Al año siguiente se concluyó el primer tramo del circuito de pruebas
en Emsland.
En 1987 el Transrapid 06 fue equipado con un sofisticado sistema de levitación y guía, y se
culminó con las obras del circuito de pruebas, que constaban de dos bucles y una longitud total
de 31.5 km, en la cual se alcanzó una velocidad de 392 km/h [7]
. En 1988 se inician las pruebas
operativas en condiciones de servicio, alcanzándose un nuevo récord de 412.6 km/h. En la
Exhibición Internacional de Transporte se presentó el Transrapid 07, con una velocidad máxima
operativa de 500 km/h. Al año siguiente, dicho tren alcanza 436 km/h. En 1991, después de
extensas pruebas y análisis, los Ferrocarriles Federales Alemanes en cooperación con varias
20
universidades reconocieron que el sistema magnético de alta velocidad Transrapid estaba listo
para ser operado regularmente.
Un año después, en 1992, el Gobierno Federal decide incluir la línea Berlín-Hamburgo en el
Plan Federal de Transporte. Es así como en 1993, el Transrapid 07 alcanza 450 km/h (ver
Figura 1-9). La empresa “Magnetschnellbahn Berlin-Hamburg GmbH” en conjunto con varios
bancos, presentan al gobierno el "Concepto" para la financiación y operación por el sector
privado del sistema magnético de alta velocidad Berlín-Hamburgo. Al año siguiente, el gobierno
federal decide concretar la construcción de la línea Berlín-Hamburgo y la ley de planeamiento de
sistemas Maglev fue aprobada por el parlamento [7]
.
Figura 1-8. Transrapid 06 [7]
.
En el año de 1999, el vehículo de pre-producción en la planta de Thyssen Transrapid System
GmbH en Kassel, el Transrapid 08, un tren de pasajeros de 3 secciones, similares a los previstos
para la ruta Berlín-Hamburgo, diseñado para viajar a una velocidad de 550 km/h, fue el nuevo
tren más ligero, más aerodinámico, más silencioso y más económico que su predecesor, el
Transrapid 07.

21
Figura 1-9. El Transrapid 07 alcanza una velocidad de 436 km/h [7]
.
Figura 1-10. El Transrapid 08, en la ruta Berlín-Hamburgo, velocidad de 550 km/h [7]
.
22
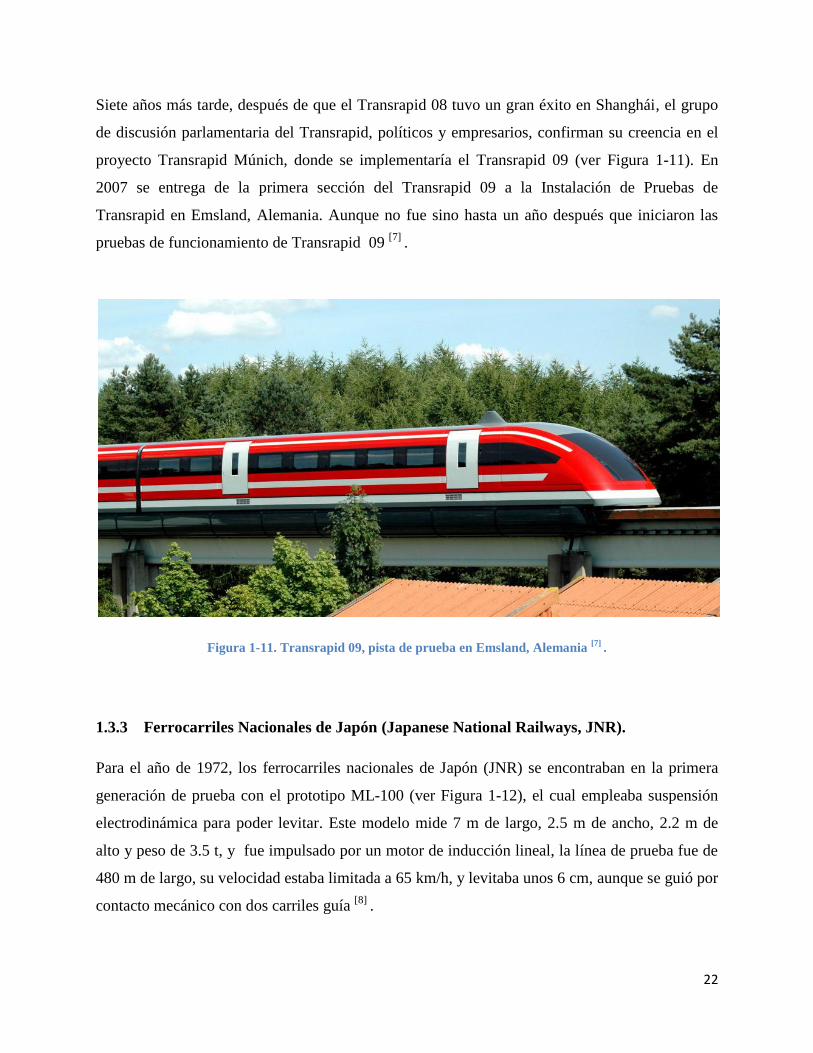
Siete años más tarde, después de que el Transrapid 08 tuvo un gran éxito en Shanghái, el grupo
de discusión parlamentaria del Transrapid, políticos y empresarios, confirman su creencia en el
proyecto Transrapid Múnich, donde se implementaría el Transrapid 09 (ver Figura 1-11). En
2007 se entrega de la primera sección del Transrapid 09 a la Instalación de Pruebas de
Transrapid en Emsland, Alemania. Aunque no fue sino hasta un año después que iniciaron las
pruebas de funcionamiento de Transrapid 09 [7]
.
Figura 1-11. Transrapid 09, pista de prueba en Emsland, Alemania [7]
.
1.3.3 Ferrocarriles Nacionales de Japón (Japanese National Railways, JNR).
Para el año de 1972, los ferrocarriles nacionales de Japón (JNR) se encontraban en la primera
generación de prueba con el prototipo ML-100 (ver Figura 1-12), el cual empleaba suspensión
electrodinámica para poder levitar. Este modelo mide 7 m de largo, 2.5 m de ancho, 2.2 m de
alto y peso de 3.5 t, y fue impulsado por un motor de inducción lineal, la línea de prueba fue de
480 m de largo, su velocidad estaba limitada a 65 km/h, y levitaba unos 6 cm, aunque se guió por
contacto mecánico con dos carriles guía [8]
.

23
Figura 1-12. Prueba del vehículo ML-100 [8]
.
En 1976 se generaba la primera prueba del vehículo EML-50 (ver Figura 1-13), el cual mide 2.8
m de largo, 1.7 m de ancho, 2.1 m de altura y peso de 1.8 t. Este modelo ocupa cuatro imanes de
levantamiento y cuatro imanes para ser guiado los cuales se encuentran en grupos separados y
actúan en los planos horizontales y los planos verticales de los rieles, respectivamente, en forma
de L (visto el arreglo desde el suelo), y es propulsado por un motor de inducción lineal de una
sola cara. El carril de ensayo está limitado a una longitud de 166 m, por lo cual, la velocidad
también está limitada a 40 km/h. Este modelo presentó resultados satisfactorios. En ese mismo
año se encontraba en construcción la segunda generación del vehículo de prueba ML-100, el
cual tiene una longitud de 10 m de largo, 3.8 m de ancho, 2.7 m de altura y un peso de 10 t [8]
.
Figura 1-13. Prueba del vehículo EML-50 [8]
.

24
En 1977, JNR había desarrollado su segundo vehículo Maglev a gran escala, el ML500 (ver
Figura 1-14) con el que obtuvo el record mundial de 517 km/h en la pista de prueba Miyazaki, la
cual media 7km, ubicada en Kyushu en la parte sur de Japón. Dos años más tarde se creó un
modelo mejorado llamado ML500R (ver Figura 1-15) [9]
.
Figura 1-14. Vehículo ML500, obtuvo el record de 517 km/h [9]
.
Figura 1-15. Vehículo ML500R [10]
.

25
En 1980, JNR construyó un transporte de pasajeros el MLU-001 (ver Figura 1-16), el cual lleva
imanes superconductores a cada lado del carril en forma de “U”. En 1982, este vehículo logró
una velocidad de 305 km/h; la longitud de la pista limita la velocidad del pesado vehículo.
Finalmente se construyó un conjunto de tres coches que se desarrollaron a velocidades más
lentas, pero realizaron muchos cientos de kilómetros de pruebas. Estas pruebas constituyeron la
base del diseño comercial, que trajo el ingreso, del MLU-002 (ver Figura 1-17) [10]
.
Figura 1-16. Vehículo MLU-001, alcanzo la velocidad de 305 km/h [9]
.
Aunque no fue sino hasta siete años más tarde, en el año de 1987, que el gobierno japonés llevó
acabó la privatización de la endeudada JNR, que se había encargado de la red nacional de
ferrocarriles de Japón desde la era Meiji, 1968. Las líneas de JNR se dividieron en once regiones
de la compañía de ferrocarriles del Japón (JR).
En el año de 1989 fue cuando se logró culminar la pista de prueba de 43 km, 128 km al oeste de
Tokio, en el territorio de Yamanashi. Este centro de pruebas fue concebido para formar parte de
una línea completa de levitación magnética entre Tokio y Osaka, en la primera década del siglo
XX. Este centro de pruebas está compuesto de un 80% de túneles y puso a prueba las
condiciones más realistas de lo que hizo la instalación en Miyazaki. El prototipo de vehículo
MLU-002 fue diseñado para dar preferencia a la levitación mediante un flujo nulo del carril guía
en forma de “U”. La longitud del vehículo es de 22 m, soporta a 44 pasajeros y pesa
aproximadamente 17 toneladas [10]
.

26
Figura 1-17. Diseño comercial del vehículo MLU-002 [9]
.
En 2003, el maglev MLX01 alcanzo la velocidad de 581 km/h. Este es el Maglev más rápido sin
precedentes, hasta ese momento, así como un tren más rápido, superando ligeramente el intento
del tren de gran velocidad (Train à Grande Vitesse, TGV) de Francia en 2007.
JR-Maglev MLX01 es uno de los últimos diseños de una serie de trenes de levitación magnética
en el desarrollo de Japón desde la década de 1970. Se compone de un máximo de cinco coches
para ejecutar pruebas en la línea de Yamanashi. En 1997 el MXL01 empezó a correr en dicha
pista de pruebas, la cual tienen una longitud de 18,4 km (ver Figura 1-18). En abril de 1999 el
tren de ultra-alta velocidad MLX01 estableció el récord mundial de velocidad, alcanzando los
552 km/h, mismo que en diciembre de 2003 volvería a romper, alcanzando una velocidad de 581
km/h, con un tren de tres vehículos [11]
.
Figura 1-18. Tren Maglev MLX01, Pista de prueba Yamanashi [11]
.

27
1.3.4 Programa Urbano Maglev de Corea (Urban Maglev Program, UMP).
El UMP se desarrolló para baja y mediana velocidad del sistema Maglev, tuvo su inició en 1989
por el Instituto Coreano de Maquinaria y Materiales (Korea Institute of Machinery and Materials,
KIMM) y con el apoyo financiero del Ministerio de Ciencia y Tecnología. El desarrollo se centró
en un vehículo de levitación magnética con suspensión electromagnética y propulsión mediante
un motor lineal de inducción [12]
.
En 1997, se construyo 1.1 km de pista en Kimm, que se amplió a 1.3 km en 2002. El carril tiene
6% de pendiente y el radio mínimo es de 60 m. También tiene, en paralelo, un interruptor de
movimiento tipo pista. El modelo del transporte urbano Maglev (UTM-01, ver Figura 1-19) es un
tren compuesto por dos vehículos que se desarrollaron en 1998 [12]
.
Figura 1-19. Vehículo UTM-01 [12]
.
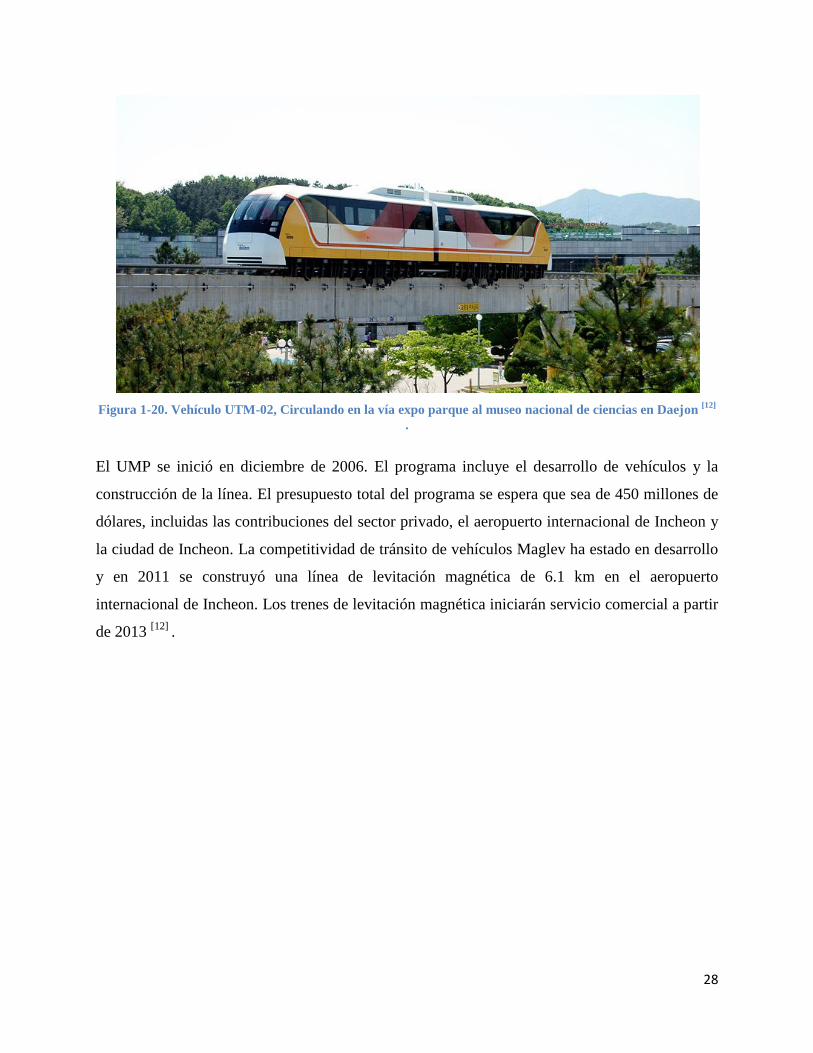
Desde 2003, Hyundai-Rotem, la compañía de Corea que fabricó el primer tren, continuó con el
proyecto Maglev para desarrollar el UTM-02 (ver Figura 1-20), el Ministerio de Comercio,
Industria y Energía se encargó del apoyo financiero. El UTM-02 fue desarrollado para
proporcionar un servicio de transporte en una pista de 1 km de longitud, la vía única entre el
expo parque y el museo nacional de ciencias en Daejon. La línea se construyó mediante la
mejora de un tramo de vía existentes [12]
.
28
Figura 1-20. Vehículo UTM-02, Circulando en la vía expo parque al museo nacional de ciencias en Daejon [12]
.
El UMP se inició en diciembre de 2006. El programa incluye el desarrollo de vehículos y la
construcción de la línea. El presupuesto total del programa se espera que sea de 450 millones de
dólares, incluidas las contribuciones del sector privado, el aeropuerto internacional de Incheon y
la ciudad de Incheon. La competitividad de tránsito de vehículos Maglev ha estado en desarrollo
y en 2011 se construyó una línea de levitación magnética de 6.1 km en el aeropuerto
internacional de Incheon. Los trenes de levitación magnética iniciarán servicio comercial a partir
de 2013 [12]
.

29
Capítulo 2
Tecnología Maglev En Trenes
En este capítulo se conoce cada uno de los sistemas necesarios para un tren de levitación
magnética, abordando los cuatro sistemas principales que son: la levitación, la propulsión, la
orientación y la transferencia de energía al tren o vehículo. Para cada sistema se conocerá cada
uno de los diferentes métodos y tecnologías que se han desarrollado hasta nuestros días.
El desarrollo de la tecnología Maglev se ha logrado gracias a la implementación de nuevos
sistemas, tanto en levitación y propulsión, esto con el fin de desarrollar una máquina que sea
capaz de alcanzar las características del tren Maglev y se desarrolle de manera comercial. Se
sigue trabajando en la levitación magnética por que cuenta con ciertas ventajas (ver Tabla 2-1) con
respecto al tren convencional, En la Tabla 2-2 se realiza a comparación entre el sistema de
levitación magnética y otros sistemas de transporte [4]
.
30
2.1 Levitación.
Se denomina levitación al efecto que logra hacer que un objeto o cuerpo se mantenga en
suspensión en el aire sin tener ningún tipo de contacto con el que lo hace levitar [16]
, dentro de la
levitación existen tres tipos de tecnologías:
La suspensión electromagnética (EMS), la suspensión electrodinámica (EDS) y la suspensión
electromagnética híbrida (HEMS).
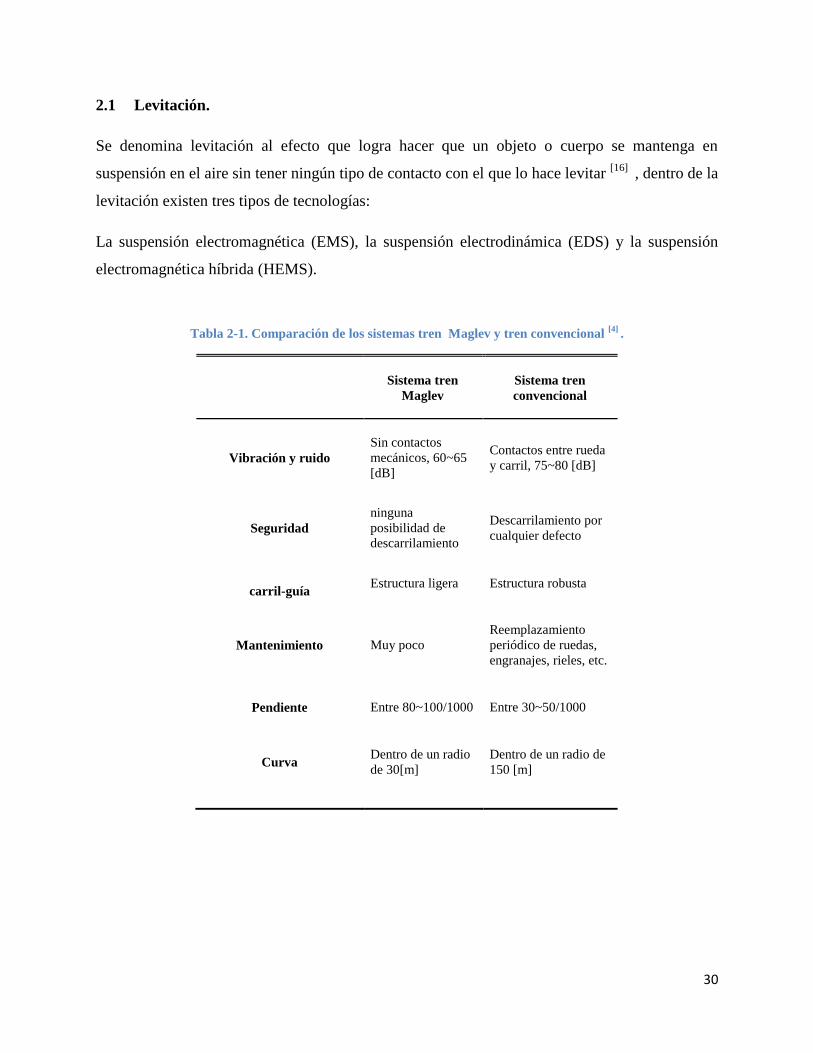
Tabla 2-1. Comparación de los sistemas tren Maglev y tren convencional [4]
.
Sistema tren
Maglev
Sistema tren
convencional
Vibración y ruido
Sin contactos
mecánicos, 60~65
[dB]
Contactos entre rueda
y carril, 75~80 [dB]
Seguridad
ninguna
posibilidad de
descarrilamiento
Descarrilamiento por
cualquier defecto
carril-guía
Estructura ligera
Estructura robusta
Mantenimiento
Muy poco
Reemplazamiento
periódico de ruedas,
engranajes, rieles, etc.
Pendiente
Entre 80~100/1000
Entre 30~50/1000
Curva
Dentro de un radio
de 30[m]
Dentro de un radio de
150 [m]

31
Tabla 2-2. Comparación de las características de varios sistemas de transporte [4]
.
Tipo
Velocidad
Ecológico
Curva
Tren convencional
(Rueda metálica en riel)
◦
◦
○
Tren de motor lineal
(rueda en riel)
◦ ○ ●
Tren Maglev
● ● ●
Ferrocarril
(Neumáticos de caucho)
◦ ◦ ●
Monorriel
◦ ○ ●
(◦) Regular, (○) Bueno, (●) Excelente.
2.1.1 Suspensión electromagnética (Electromagnetic Suspension, EMS).
La levitación se logra sobre la base de la fuerza de atracción magnética entre un carril y
electroimanes, como se muestra en la Figura 2-1. Esta metodología es inherentemente inestable
debido a la característica del circuito magnético. Por lo tanto, es indispensable el control preciso
del entrehierro, para poder mantener el espacio de aire uniforme. Debido a que EMS utiliza
generalmente los espacios de aire pequeños como de 10 mm, mientras la velocidad se hace
mayor, es más difícil mantener dicho control. Sin embargo, EMS es técnicamente más fácil que
la EDS y es capaz de levitar por sí mismo en velocidades bajas o incluso detenido, lo cual es
imposible con el tipo de EDS.
Dentro de la EMS, hay dos tipos de tecnologías de levitación:
Levitación y orientación integrada, tales como el coreano UTM y el japonés HSST.
Levitación y orientación separada como el Alemán Transrapid.

32
Este último es favorable para la operación en alta velocidad debido a que la levitación y la
orientación no interfieren entre sí, pero aumenta el número de controladores. El primero es
favorable para la operación en baja velocidad por su bajo costo debido a que el número de
electroimanes y controladores se reduce y la fuerza de guía se genera automáticamente por la
diferencia de reluctancia. La calificación en cuanto al suministro de energía eléctrica, del tipo
integrado es menor que la del tipo separado; a medida que aumenta la velocidad, la interferencia
entre la levitación y la orientación aumenta; en el tipo integrado es difícil de controlar la
levitación y la orientación de forma simultánea [4]
.
Figura 2-1. Suspensión electromagnética, a) levitación y orientación integrada, b) levitación y orientación
separada [4]
.
En la EMS es necesario emplear electroimanes para poder hacer levitar el tren, por lo que en
tramos demasiados largos tendrían un costo significativo en el consumo de energía eléctrica,
también se conoce la EMS por medio de la superconductividad, pero esta generalmente se utiliza
en EDS. Se le llama superconductividad a la característica que poseen ciertos materiales para
conducir corriente eléctrica sin resistencia ni pérdida de energía, en determinadas condiciones,
pero estos materiales tienen un determinado comportamiento magnético; dicho comportamiento
no permite que un campo magnético externo penetre, con lo cual se puede lograr que un material
levite [17]
.
33
2.1.2 Suspensión electrodinámica (Electrodynamic Suspension, EDS).
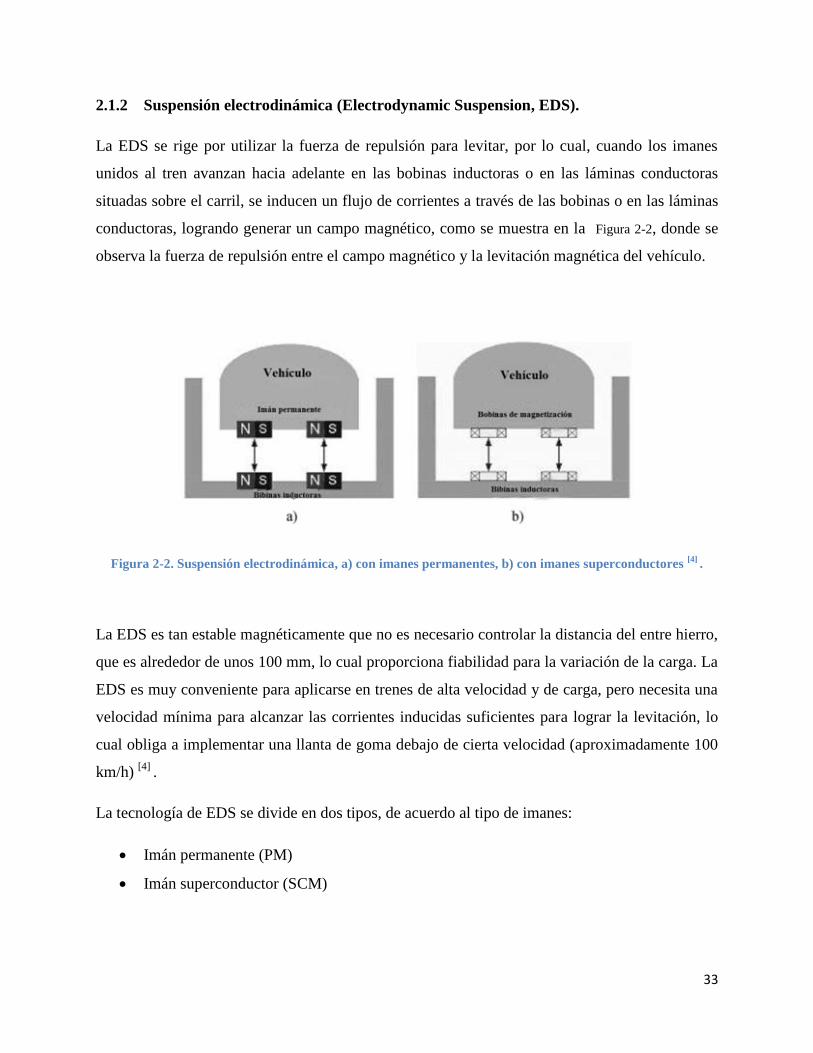
La EDS se rige por utilizar la fuerza de repulsión para levitar, por lo cual, cuando los imanes
unidos al tren avanzan hacia adelante en las bobinas inductoras o en las láminas conductoras
situadas sobre el carril, se inducen un flujo de corrientes a través de las bobinas o en las láminas
conductoras, logrando generar un campo magnético, como se muestra en la Figura 2-2, donde se
observa la fuerza de repulsión entre el campo magnético y la levitación magnética del vehículo.
Figura 2-2. Suspensión electrodinámica, a) con imanes permanentes, b) con imanes superconductores [4]
.
La EDS es tan estable magnéticamente que no es necesario controlar la distancia del entre hierro,
que es alrededor de unos 100 mm, lo cual proporciona fiabilidad para la variación de la carga. La
EDS es muy conveniente para aplicarse en trenes de alta velocidad y de carga, pero necesita una
velocidad mínima para alcanzar las corrientes inducidas suficientes para lograr la levitación, lo
cual obliga a implementar una llanta de goma debajo de cierta velocidad (aproximadamente 100
km/h) [4]
.
La tecnología de EDS se divide en dos tipos, de acuerdo al tipo de imanes:
Imán permanente (PM)
Imán superconductor (SCM)
34
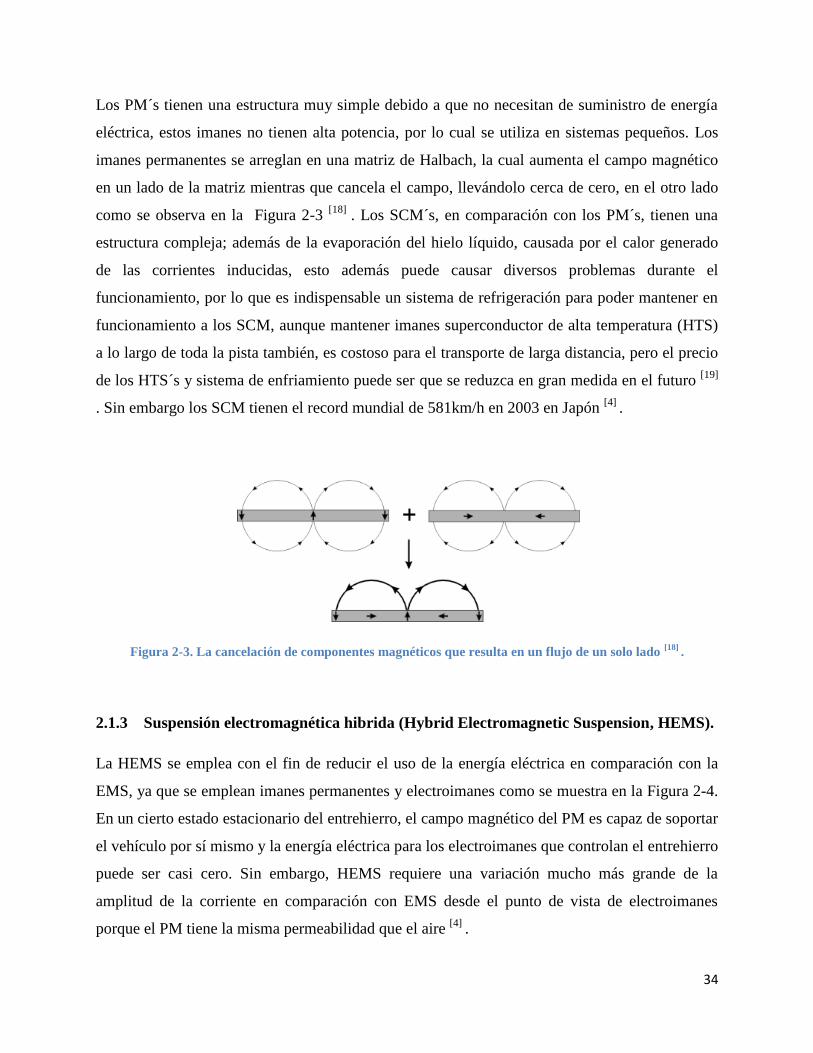
Los PM´s tienen una estructura muy simple debido a que no necesitan de suministro de energía
eléctrica, estos imanes no tienen alta potencia, por lo cual se utiliza en sistemas pequeños. Los
imanes permanentes se arreglan en una matriz de Halbach, la cual aumenta el campo magnético
en un lado de la matriz mientras que cancela el campo, llevándolo cerca de cero, en el otro lado
como se observa en la Figura 2-3 [18]
. Los SCM´s, en comparación con los PM´s, tienen una
estructura compleja; además de la evaporación del hielo líquido, causada por el calor generado
de las corrientes inducidas, esto además puede causar diversos problemas durante el
funcionamiento, por lo que es indispensable un sistema de refrigeración para poder mantener en
funcionamiento a los SCM, aunque mantener imanes superconductor de alta temperatura (HTS)
a lo largo de toda la pista también, es costoso para el transporte de larga distancia, pero el precio
de los HTS´s y sistema de enfriamiento puede ser que se reduzca en gran medida en el futuro [19]
. Sin embargo los SCM tienen el record mundial de 581km/h en 2003 en Japón [4]
.
Figura 2-3. La cancelación de componentes magnéticos que resulta en un flujo de un solo lado [18]
.
2.1.3 Suspensión electromagnética hibrida (Hybrid Electromagnetic Suspension, HEMS).
La HEMS se emplea con el fin de reducir el uso de la energía eléctrica en comparación con la
EMS, ya que se emplean imanes permanentes y electroimanes como se muestra en la Figura 2-4.
En un cierto estado estacionario del entrehierro, el campo magnético del PM es capaz de soportar
el vehículo por sí mismo y la energía eléctrica para los electroimanes que controlan el entrehierro
puede ser casi cero. Sin embargo, HEMS requiere una variación mucho más grande de la
amplitud de la corriente en comparación con EMS desde el punto de vista de electroimanes
porque el PM tiene la misma permeabilidad que el aire [4]
.

35
Figura 2-4. Suspensión electromagnética hibrida [4]
.
2.2 Propulsión.
Los trenes Maglev tienen un sistema de propulsión, para el cual se implementa un motor lineal,
el cual es diferente a un motor rotativo convencional, ya que no utiliza el acoplamiento mecánico
para el movimiento rectilíneo. Por lo cual, su estructura es simple y robusta, en comparación con
el motor rotativo.
Hasta la fecha, la máquina de inducción lineal ha sido la tecnología dominante. Las máquinas de
inducción trabajan eficazmente como actuadores de carrera larga, donde una baja eficiencia no es
perjudicial. Se puede controlar a través de un controlador de voltaje de estado sólido
relativamente barato.
En la Figura 2-5 se muestra el concepto del motor lineal derivado del motor rotativo. Dicha
figura muestra un motor rotativo convencional, cuyo estator, rotor y bobinas se han abierto, se
amplían, y se colocan en forma de un carril. A pesar de que el principio de funcionamiento es
exactamente el mismo que el motor rotativo, el motor lineal tiene una longitud finita de una parte
primaria o secundaria y causa como “efecto final”, además del gran espacio del entrehierro, una
disminución de su eficiencia [4]
.

36
Figura 2-5. Concepto del motor lineal derivado del motor rotativo [9]
.
A pesar de estas desventajas, el motor lineal es superior al motor convencional en el caso del
movimiento rectilíneo, debido a minimización de la vibración y el ruido generado directamente
del contacto mecánico de los componentes, tales como, tornillos, cadenas y la caja de cambios.
Del mismo modo que los motores rotativos, los motores lineales para propulsión de levitación
magnética existen de dos tipos:
Motor lineal asíncrono o de inducción (LIM)
El motor lineal sincrónico (LSM)
El LIM y el LSM se controlan a través de la frecuencia. A diferencia de la LIM, el LSM tiene
una fuente magnética dentro de sí mismo. Por lo tanto, cuando se hace la comparación con el
LIM, el LSM resulta que tiene muchas ventajas, tales como una alta eficiencia, el alto factor de
potencia, y la alta precisión posicional [1] .

37
2.2.1 Motor de inducción lineal (LIM).
Este tipo de motor gana una especial atención debido a su estructura simple y a su bajo costo de
construcción aunque es menos eficiente.
El LIM tiene el mismo principio de funcionamiento que el motor de inducción. La variante
espacio-tiempo del campo magnético son generados por la parte primaria a través del entrehierro,
y la fuerza electromotriz (EMF) inducida en la parte secundaria, en una lamina conductora. Esta
EMF genera las corrientes de Foucault, también conocidas como corrientes de Eddy, que
interactúan con el flujo en el entrehierro y producen la fuerza de empuje que se conoce como
fuerza de Lorentz. El LIM se clasifica en dos tipos de acuerdo a la ubicación de primario:
Tipo de primario corto (SP).
Tipo de primario largo (LP).
El tipo SP cuenta con las bobinas del estator abordo y la relación de láminas conductoras se
encuentran en el carril y el tipo LP las bobinas del estator se ubican en el carril y las láminas
conductoras se encuentran a bordo como se muestra en la Figura 2-6.
Figura 2-6. Motor lineal de inducción tipo LP [4]
.
Para el tipo LP, el costo de construcción es mucho mayor que el de tipo SP, pero no se necesita
ninguna corriente en el colector para el funcionamiento. En altas velocidades, el tipo LP se

38
utiliza generalmente por que la transferencia de energía mediante el colector de corriente es
difícil.
En el caso del tipo SP, es muy difícil colocar las láminas de aluminio en el carril guía y con ello
reducir los costos de construcción. Sin embargo, el tipo SP tienen una baja eficiencia energética,
debido a la fuerza de arrastre y la inductancia de fuga causada por el efecto final. Además de que
el tipo SP no puede exceder los 300 km/h, aproximadamente, debido a la corriente de colector.
Por esta razón, el LIM tipo SP generalmente se aplica a los trenes Maglev de baja y media
velocidad como el japonés HSST o el coreano UTM [4]
.
2.2.2 Motor síncrono lineal (LSM).
El LSM a diferencia del LIM, cuenta con una fuente magnética dentro de sí mismo, como se
observa en la Figura 2-7. La interacción entre el campo magnético y la corriente inducida
producen la fuerza de empuje. La velocidad del LSM es controlada por la frecuencia. Al igual
que el LIM, para el LSM, de acuerdo con la localización del campo, existen dos tipos
equivalentes al LIM (tipo LP y SP).
Figura 2-7. Motor síncrono lineal tipo LP [4]
.
Además, en el LSM existen otros dos tipos de acuerdo con el campo magnético. Uno de ellos
utiliza los electroimanes con núcleo de hierro (el alemán Transrapid) y el otro utiliza los imanes
superconductores, con núcleo de aire (el japonés MLX).

39
Para los trenes Maglev de alta velocidad se antepone el LSM, porque tiene mayor eficiencia y un
mejor factor de potencia que el LIM. La eficiencia económica del consumo de energía es muy
importante para la operación en alta velocidad, aún sobre el mayor costo de construcción con
respecto al LIM.
Tanto el LIM como el LSM no requieren técnicas de sensores para su funcionamiento, y son
muy parecidos en fiabilidad y capacidad de control, sin embargo, cualquiera de ellos puede ser
elegido basándose en la velocidad, los costos de construcción, los costos de consumo energético,
la eficiencia, entre otros factores [4]
.
2.3 Orientación.
Los trenes Maglev son sistemas sin contacto que requieren una fuerza de guía para la prevención
del desplazamiento lateral, al igual que la levitación, la orientación se lleva a cabo
electromecánicamente por medio de fuerzas magnéticas, para la cual se pueden emplear dos
formas: la de repulsión magnética o la de atracción magnética.
2.3.1 Fuerza de repulsión magnética.
Como se muestra en la Figura 2-8, mediante el establecimiento de las bobinas de propulsión a los
lados izquierdo y derecho del carril guía, y debido a la unión de estas bobinas, la fuerza
electromotriz inducida se anula entre sí cuando el tren coloca en el centro del carril. Sin
embargo, una vez que el tren pase cerca de una pared lateral, el flujo de la corriente en las
bobinas debido a la EMF inducida por la diferencia de distancias, produce la fuerza que guía.
En el MLX, se implementa la conexión de las bobinas de levitación correspondientes en ambas
paredes laterales, como se muestra en la Figura 2-9; estas bobinas funcionan como un sistema de
guía. Cuando un tren se desplaza lateralmente, se inducen las corrientes que circulan entre estas
dos bobinas, lo que genera la fuerza de guía.
En el caso del Transrapid, se añaden guías laterales electromagnéticas en el lado de los carriles
del vehículo y las reacciones están en ambos lados de la vía. La interacción entre ellos mantiene
el vehículo centrado lateralmente como se muestra en la Figura 2-10 [4]
.

40
Figura 2-8. Propulsión-bobinas de orientación usada en el japonés MLU-002 [4]
.
Figura 2-9. Levitación-bobinas de orientación usada en el japonés MLX [4]
.
2.3.2 Fuerza de atracción magnética
En la Figura 2-11 se muestra la fuerza de atracción magnética generada para reducir la
resistencia y aumentar la inductancia cuando el vehículo se desplace lateralmente. Puesto que la
41
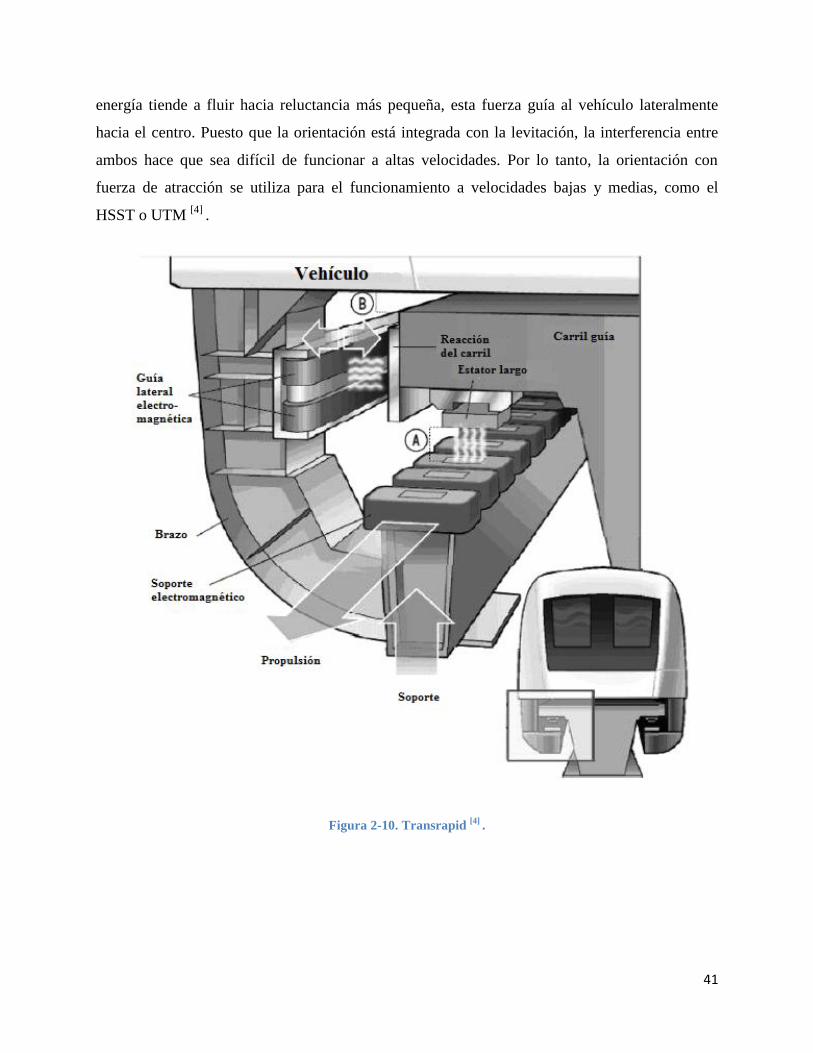
energía tiende a fluir hacia reluctancia más pequeña, esta fuerza guía al vehículo lateralmente
hacia el centro. Puesto que la orientación está integrada con la levitación, la interferencia entre
ambos hace que sea difícil de funcionar a altas velocidades. Por lo tanto, la orientación con
fuerza de atracción se utiliza para el funcionamiento a velocidades bajas y medias, como el
HSST o UTM [4]
.
Figura 2-10. Transrapid [4]
.

42
Figura 2-11. HSST [9]
.
2.4 Transferencia de energía al vehículo.
Los trenes Maglev cuentan con baterías a bordo de los vehículos, a pesar de esto, el suministro
de energía eléctrica desde el lado de la tierra es necesario para la levitación, la propulsión, el
equipo eléctrico que se encuentra a bordo, así como para la recarga de las baterías. La
transferencia de energía a lo largo de la pista implica el uso de un generador lineal o un contacto
mecánico basado en la velocidad de operación, por lo cual se dividen en dos tipos.
2.4.1 Velocidad de operación Baja y Media.
Para los tres Maglev que circulan a bajas velocidades de hasta 100 km/h, el tren de levitación
magnética, por lo general, se utiliza un contacto mecánico tipo pantógrafo (ver Figura 2-12 ), el
cual es un mecanismo articulado que transfiere energía eléctrica al tren para poder ser utilizada.
Como se ha señalado, esta es la razón por la que se utiliza en el tren Maglev con LIM tipo SP
usado en baja y media velocidad [4]
.
43
Figura 2-12. Pantógrafo.
2.4.2 Velocidad de operación alta.
A altas velocidades, el tren Maglev ya no puede obtener energía desde el lado de tierra mediante
el uso de un contacto mecánico. Por lo cual, los trenes Maglev de alta velocidad utiliza su propia
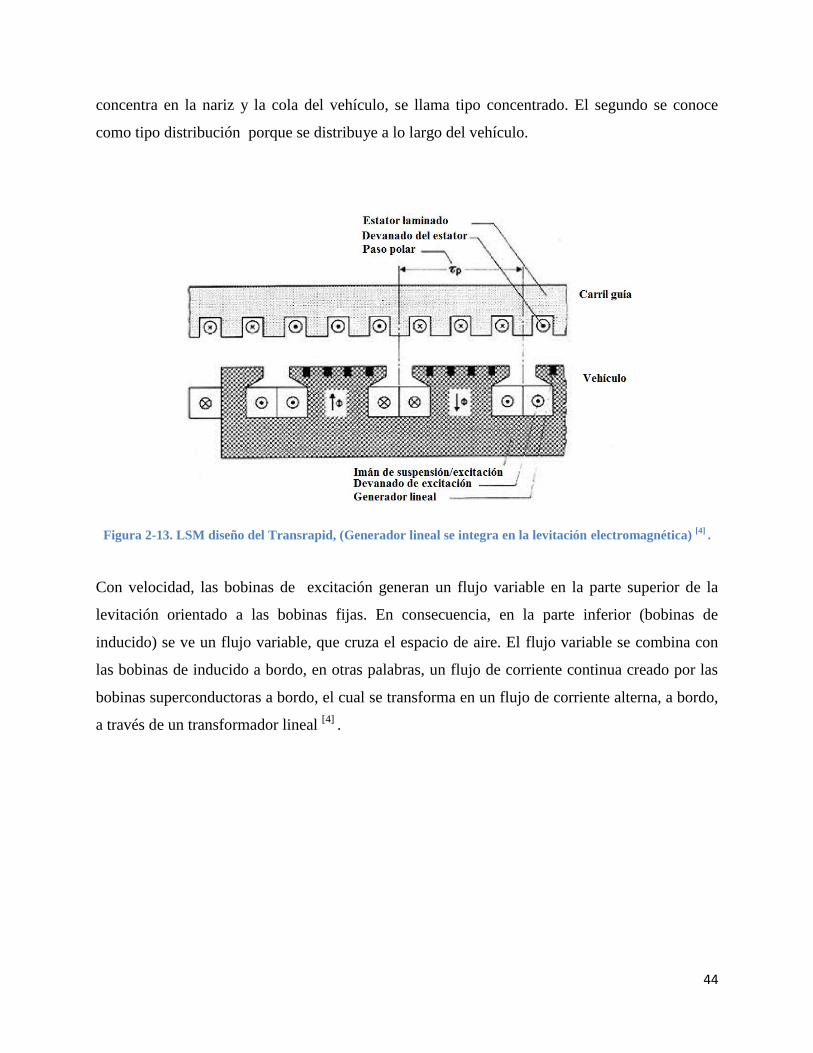
manera de entregar energía al vehículo desde la tierra. El tren Transrapid alemán emplea el uso
de un generador lineal que se integra en los electroimanes de levitación como se demuestra en la
Figura 2-13. El generador lineal deriva potencia desde el campo electromagnético de viaje
cuando el vehículo está en movimiento. La frecuencia de los devanados del generador es seis
veces mayor que la frecuencia del motor síncrono. El generador lineal funciona sin contacto
mecánico, como un aspecto que es muy positivo para la operación de alta velocidad. Sin
embargo, la fluctuación de la tensión inducida debido a la irregularidad del entrehierro, y la
pequeña magnitud de la tensión inducida por las bobinas inductoras miniatura puede ser un
problema.
Para el MLX, además de un generador impulsado con turbina de gas, se cuenta con dos
generadores lineales. El primero utiliza exclusivamente una bobina superconductora (500 kA) y
las bobinas de inducido están en los lados superior e inferior como se muestra en la Figura 2-14
a. El segundo utiliza bobinas de inducido entre las bobinas superconductoras y las bobinas de
propulsión y levitación como se muestra en la Figura 2-14 b. Debido a que el primero se
44
concentra en la nariz y la cola del vehículo, se llama tipo concentrado. El segundo se conoce
como tipo distribución porque se distribuye a lo largo del vehículo.
Figura 2-13. LSM diseño del Transrapid, (Generador lineal se integra en la levitación electromagnética) [4]
.
Con velocidad, las bobinas de excitación generan un flujo variable en la parte superior de la
levitación orientado a las bobinas fijas. En consecuencia, en la parte inferior (bobinas de
inducido) se ve un flujo variable, que cruza el espacio de aire. El flujo variable se combina con
las bobinas de inducido a bordo, en otras palabras, un flujo de corriente continua creado por las
bobinas superconductoras a bordo, el cual se transforma en un flujo de corriente alterna, a bordo,
a través de un transformador lineal [4]
.

45
Figura 2-14. Dos tipos de generadores lineales usados en el MLX. a) tipo concentrado. b) tipo distribuido [4]
.

46
Capítulo 3
Análisis Del Motor Síncrono Lineal
En este capítulo se realiza el análisis del campo magnético del motor síncrono lineal. El análisis
se basa en una sola laminación del motor síncrono lineal, el cual se representa mediante un
esquema donde se observa cada una de las partes de este. Se analiza la densidad de flujo
tangencial y normal, se analiza la fuente de excitación y la fuente de corriente trifásica para
poder obtener el flujo, la fuerza electromotriz y la fuerza que impulsara al tren.
Para el tren de levitación magnética se implementa un motor síncrono lineal de estator corto con
electroimanes con núcleo de hierro como sistema de propulsión de alta velocidad. En la Figura
3-1 se observa el esquema del LSM de estator corto, el primario contiene un devanado trifásico
similar al de un LIM. El secundario requiere de un devanado de excitación de corriente continua.
La interacción entre el campo magnético y la corriente de excitación produce la fuerza de
empuje. La velocidad de la onda magnética viajera depende de la frecuencia de la fuente de
alimentación.

47
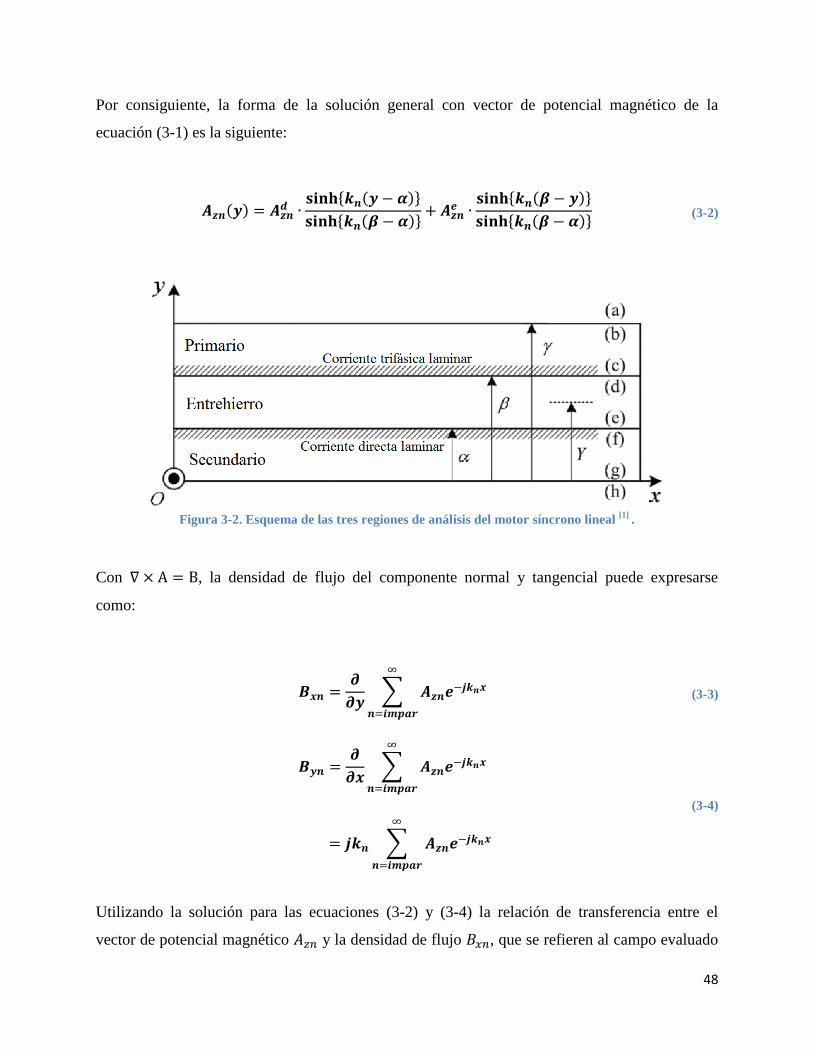
3.1 Análisis de campo magnético mediante relaciones de transferencia.
En la Figura 3-2 se muestra el esquema de las tres regiones de análisis del motor síncrono lineal.
Con el fin de obtener las soluciones analíticas para la distribución del campo magnético en el
motor lineal, se asume que la corriente trifásica (primario) y la corriente continua de
excitación (secundaria), fluyen a través de una lámina extremadamente delgada sobre la
superficie interior del primario y del secundario, respectivamente. Por tanto la permeabilidad
relativa del material de núcleo de hierro y la extensión sobre el eje “z” es infinita. Las letras (a)-
(h) representan las superficies en los límites indicados [1]
.
Figura 3-1. Esquema de un motor síncrono lineal de estator corto [1]
.
Puesto que no hay fuente electromagnética en la región analítica (d) - (e), , al igual
que . El potencial del vector magnético A se define como . El potencial del
vector magnético tiene solo componente que es independiente de z. Por lo tanto, la ecuación
de Laplace, en términos del vector potencial magnético se supone que tiene como norma de
Coulomb, , dado por:
(3-1)
donde el número de onda espacial kn del n-ésimo orden armónico es , siendo el paso polar
de la máquina, , La solución se encuentra despejando .
𝝏𝟐
𝝏𝒚𝟐𝑨𝒏 − 𝒌𝒏
𝟐𝑨𝒏 = 𝟎
48
Por consiguiente, la forma de la solución general con vector de potencial magnético de la
ecuación (3-1) es la siguiente:
(3-2)
Figura 3-2. Esquema de las tres regiones de análisis del motor síncrono lineal
[1] .
Con , la densidad de flujo del componente normal y tangencial puede expresarse
como:
(3-3)
(3-4)
Utilizando la solución para las ecuaciones (3-2) y (3-4) la relación de transferencia entre el
vector de potencial magnético y la densidad de flujo , que se refieren al campo evaluado
𝑨𝒛𝒏 𝒚 = 𝑨𝒛𝒏𝒅
𝐬𝐢𝐧𝐡 𝒌𝒏 𝒚 − 𝜶
𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝜶 + 𝑨𝒛𝒏
𝒆 𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝒚
𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝜶
𝑩𝒙𝒏 =𝝏
𝝏𝒚 𝑨𝒛𝒏𝒆
−𝒋𝒌𝒏𝒙
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
𝑩𝒚𝒏 =𝝏
𝝏𝒙 𝑨𝒛𝒏𝒆
−𝒋𝒌𝒏𝒙
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
= 𝒋𝒌𝒏 𝑨𝒛𝒏𝒆−𝒋𝒌𝒏𝒙
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
49
en la región del entrehierro [identificado en el modelo de la Figura 3-2 como la sección (d) y
(e)] son:
(3-5)
donde
y
son la densidad de flujo tangencial y el vector de potencial magnético
en los límites (d) y (e) [1]
.
3.1.1 Solución de la fuente de excitación.
Para obtener una solución única para la fuete de excitación de corriente directa (CD) se
establecen las condiciones de contorno:
(3-6)
(3-7)
donde es la densidad equivalente de corriente magnetizante de la corriente de excitación CD,
que se desarrolla como serie de Fourier:
(3-8)
donde
(3-9)
𝑩𝒙𝒏𝒅
𝑨𝑨𝟏
𝟏
𝑩𝒙𝒏𝒆
= 𝒌𝒏
𝐜𝐨𝐭𝐡 𝒌𝒏 𝜷 − 𝜶 −
𝟏
𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝜶 𝟏
𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝜶 − 𝐜𝐨𝐭𝐡 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝑨𝑨𝟏
𝟏
𝑨𝒛𝒏𝒆
𝑩𝒙𝒏𝒆 − 𝑩𝒙𝒏
𝒇= 𝝁𝟎𝑱𝒇𝒏 𝒚 = 𝜶
𝑩𝒙𝒏𝒅 − 𝑩𝒙𝒏
𝒄 = 𝟎 (𝒚 = 𝜷)
𝑱𝒇𝒏 =𝑱𝒇𝟎
𝒋𝒏𝝅 𝟏 − 𝒆𝒋𝒌𝒏𝝉𝒑 𝒆𝒋𝒌𝒏
𝒃𝒇𝒐𝟐 − 𝒆−𝒋𝒌𝒏
𝒃𝒇𝒐𝟐
𝐉𝒏 = 𝐑𝐞 𝑱𝒇𝒏 𝒆−𝒋𝒌𝒏𝒙
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
𝐢𝒛

50
(3-10)
donde es la magnitud de la densidad de corriente de la lámina, es el ancho de la apertura
en la ranura, son las vueltas por ranura de la parte secundaria y es la excitación de
corriente nominal de CD, respectivamente.
Tras un análisis similar a (3-5), en el límite las relaciones de transferencia se puede
expresar como:
(3-11)
Utilizando (3-11), el vector de potencial magnético en el límite se puede obtener como:
(3-12)
3.1.2 Solución de campo por la fuente de corriente trifásica.
Las condiciones de contorno utilizados en la predicción analítica del potencial del vector
magnético debido a la fuente de corriente trifásica son los siguientes:
(3-13)
(3-14)
𝑱𝒇𝟎 =𝑵𝒄𝒅𝑰𝒄𝒅𝒃𝒇𝒐
𝑩𝒙𝒏𝒀
𝑨𝑨𝟏
𝟏
𝑩𝒙𝒏𝒆
= 𝒌𝒏
𝐜𝐨𝐭𝐡 𝒌𝒏 𝒀 − 𝜶 −
𝟏
𝐬𝐢𝐧𝐡 𝒌𝒏 𝒀 − 𝜶 𝟏
𝐬𝐢𝐧𝐡 𝒌𝒏 𝜷 − 𝜶 − 𝐜𝐨𝐭𝐡 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒀
𝑨𝑨𝟏
𝟏
𝑨𝒛𝒏𝒆
𝑨𝒛𝒏𝒀 =
𝐬𝐢𝐧𝐡 𝒌𝒏 𝒀 − 𝜶
𝒌𝒏 𝑩𝒙𝒏
𝒆 + 𝒌𝒏 𝐜𝐨𝐭𝐡 𝒀 − 𝜶 𝑨𝒛𝒏𝒆
𝑩𝒙𝒏𝒆 − 𝑩𝒙𝒏
𝒇= 𝟎 (𝒚 = 𝜶)
𝑩𝒙𝒏𝒅 − 𝑩𝒙𝒏
𝒄 = 𝝁𝟎𝑱𝒑𝒏 𝒚 = 𝜷

51
donde es la magnitud de densidad de la lámina originada por la corriente trifásica. Se deriva
con el mismo proceso del análisis del caso de excitación de corriente continua con un desarrollo
en serie de Fourier [1]
.
(3-15)
donde el coeficiente de Fourier es:
(3-16)
donde es la magnitud de la densidad de corriente de la lámina, la cual se determina mediante:
(3-17)
donde es el ancho de la apertura en la ranura, son las vueltas por la ranura de la parte
secundaria y es la corriente trifásica nominal de CA, respectivamente.
3.2 Fuerza electromotriz de vuelta y empuje.
La fuerza electromotriz (FEM) de vuelta está dada por el producto de la velocidad, , y la
velocidad de cambio en la relación de flujo con respecto a la posición. De la densidad de flujo
magnético por fuente de excitación de corriente continua y área , la relación del flujo
puede ser expresada como:
(3-18)
𝑱𝟑𝒇 =𝑵𝒄𝒂𝑰𝒄𝒂𝒃𝟑𝒇
𝒅∅ = 𝑩𝒚𝒏𝒀 𝑺𝒅𝒙
𝑱𝒎 = 𝑹𝒆 𝑱𝒑𝒎 𝒆−𝒋𝒌𝒏𝒙
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
𝒊𝒛

52
Por la ecuación (3-18), los enlaces de flujo debido al campo secundario para un paso polar se
puede expresar como:
(3-19)
donde es la longitud de la primera laminación, es la longitud del paso polar, es el
tiempo, respectivamente. Por lo tanto, la fuerza electromotriz se puede expresar como:
(3-20)
donde , son las ranuras por polo por fase y las vueltas por ranura, respectivamente.
El impulso electromagnético se deriva del tensor de tensiones de Maxwell, el tensor de tensión,
, de los materiales magnéticos lineales asociados con la densidad de fuerza de Korteweg-
Helmholtz es:
(3-21)
donde la función delta de Kronecker es 0 cuando , y 1 cuando [1] . Por la
convención de la adición Einstein y suposición de que un volumen de la bobina sobre la que
actúa la fuerza, se encierra un número entero de períodos, por lo que la fuerza tangencial de
empuje, , en la sección cerrada del devanado puede expresarse de la siguiente manera:
(3-22)
∅ =𝟐
𝒀𝑳𝒔𝒕𝒌𝑨𝒛𝒏
𝒀 𝒆−𝒋𝒌𝒏
𝒕𝒔𝒕𝟐−𝒖𝒙𝒕 − 𝒆𝒋𝒌𝒏𝒖𝒙𝒕
𝑽𝑭𝑬𝑴 = −𝒅𝝀𝒇
𝒅𝒕= −𝒋𝒌𝒏𝒖𝒙𝑵𝒔𝒑𝒑𝑵𝒕𝒑𝒔∅
𝑻𝒊𝒋 = 𝝁𝑯𝒊𝑯𝒋 − 𝜹𝒊𝒋𝝁
𝟐𝑯𝒌𝑯𝒌
𝑭𝒙 = −𝑺 𝑻𝒙𝒚𝒆 = −𝑺𝝁𝟎 𝑯𝒚𝒏
𝒆 𝑯𝒙𝒏𝒆
= −𝑺𝝁𝟎 𝑯𝒚𝒏𝒆
∞
𝒏=𝒊𝒎𝒑𝒂𝒓
𝑯𝒙𝒏𝒆 ∗
53
Para la ecuación (3-22) el producto de
∗ se puede expresar como . Ya
conociendo las densidades de flujo del primario y del secundario, tanto el flujo normal como el
tangencial se suman para obtener las fuerzas totales de cada una de estas. Debido a que se
obtuvieron mediante una sumatoria ya no es necesario realizar la sumatoria indicada y se pueden
determinar directamente, al dividir el campo entre por lo cual se determina de la siguiente
manera:
(3-23)
obteniendo se puede determinar la fuerza de empuje mediante:
(3-24)
donde S es el área efectiva del primario del LSM.
𝑯𝑻𝒐𝒕𝒂𝒍𝒆 =
𝑩𝒚𝒏𝒆
𝝁𝟎
∗ 𝑩𝒙𝒏𝒆
𝝁𝟎
∗
𝑭𝒙 = −𝑺𝝁𝟎∗ 𝑯𝑻𝒐𝒕𝒂𝒍
𝒆

54
Capítulo 4
Diseño Del Motor Síncrono Lineal
En este capítulo se propone el diseño del motor síncrono lineal para ser utilizado como medio de
propulsión para un tren de levitación magnética, tomando en cuenta el análisis que se realizó en
el capítulo 3. Para el diseño se plantean las dimensiones del motor y se procede a calcularla
densidad de flujo normal y tangencial, se calcula el campo de la fuente trifásica y se procede a
calcular el flujo magnético, la fuerza electromotriz y por último se calcula la fuerza que se
obtendrá del motor.
4.1 Diseño del motor síncrono lineal.
El acto de diseñar como prefiguración, es el proceso en la búsqueda de una solución o conjunto
de soluciones. Plasmar el pensamiento de la solución o conjunto de estas, mediante esbozos,
dibujos o esquemas trazados en cualquiera de los soportes, durante o posterior a un proceso de
observación o investigación. Durante el diseño se seleccionan los materiales, dimensiones,
componentes y las características principales para alguna máquina, instrumento o dispositivo que

55
desempeñaran una función específica, de tal manera que cumpla con esta de manera óptima en
un sentido técnico y económico, de tal manera que cumpla con los requerimientos impuestos.
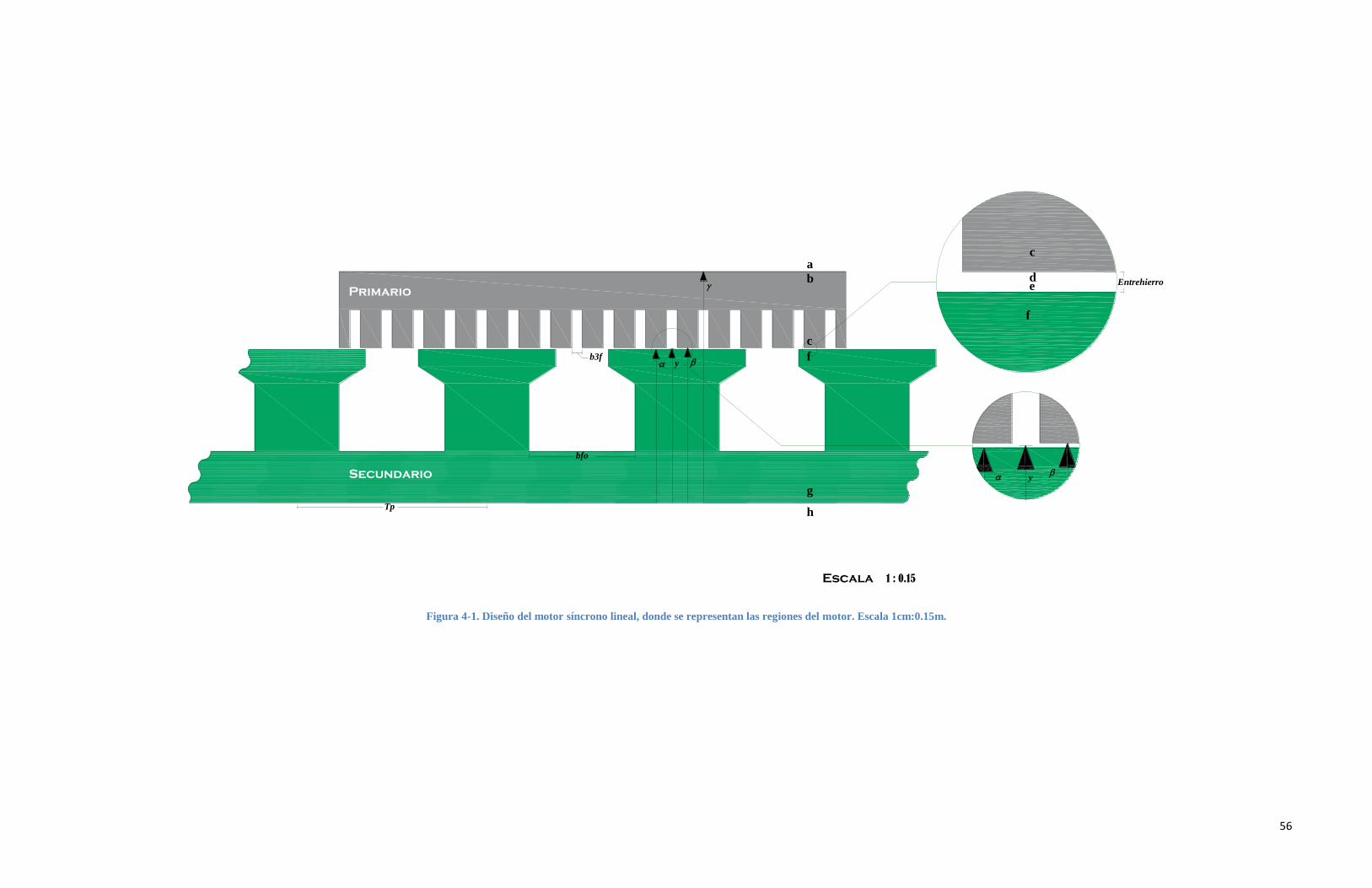
Para el diseño se elige el motor síncrono lineal por sus grandes ventajas mencionadas, el LSM
cuenta con un estator llamado primario, un rotor llamado secundario y el entrehierro, estas partes
son representadas en la Figura 4-1 se puede observar el LSM. Para realizar el cálculo de la fuerza
de tracción o de empuje se tiene que calcular el campo magnético del LSM, para el flujo
magnético se tiene la solución general de la fuente de excitación de corriente continua y de la
fuente trifásica. Se calculan los enlaces de flujo y al final se calcula la fuerza de tracción o de
empuje del LSM. En la Tabla 4-1 se muestran los datos propuestos para el motor de levitación
magnética.
Tabla 4-1. Diseño del motor síncrono lineal.
Dimensiones
Del Motor
Secundario
(Parte fija)
Primario
(Parte Movil)
= 0.72 m Icd = 200A Ica = 80A
= + Entrehierro bf0 = 0.5 m b3f = 0.05 m
y = ((-)/2)+ Ncd = 50 Nca = 13
Tp = 0.9 m
Entrehierro = 0.008m
𝝁𝟎 = 4*10-7N/A2
𝝁𝒓 = 𝝁𝟎 500
En la Figura 4-1 se describe:
Con las letras “a, b, c, d, e, f, g, h” las cuales indican los límites de cada región en el LSM.
: representan las distancias de cada una de las regiones.
: es el ancho de la apertura en la ranura del secundario.
: es el ancho de la apertura en la ranura del primario.
: Permeabilidad magnética del vacío.
: Permeabilidad magnética del hierro. Se considera hierro al 4% silicio de grano orientado.
56
Primario
Secundario
a
b
c
f
h
g
d e
y
b3f
bfo
Entrehierro
Tp
Escala 1 : 0.15
c
f
y
Figura 4-1. Diseño del motor síncrono lineal, donde se representan las regiones del motor. Escala 1cm:0.15m.

57
4.2 Análisis del campo magnético en las regiones (d) y (e).
Para calcular la densidad de flujo magnético (componente tangencial y normal), se toma la
solución general del vector de potencial magnético dado en a ecuación (3-2), de la cual y
se derivan de la solución general de la ecuación (3-5), que a su vez requiere conocer la
densidad de flujo. La densidad de flujo de la fuente de excitación de corriente continua se
expresa en función de las condiciones de contorno dadas en las ecuaciones (3-6) y (3-7). Para la
solución, se conocen las condiciones de contorno para las regiones (e) (f) y (d) (c), (ver Figura
4-1), por lo tanto, la solución a partir de las condiciones de contorno y del anisáis del campo
magnético se realiza en las regiones de contorno (d) y (e). Para realizar el programa se utiliza el
software Wolfram Mathematica 7.0 en donde para iniciar se establecen las variables que se van a
requerir.
4.2.1 Cálculo de la densidad de corriente magnetizante de la fuente de excitación (CD).
Para poder calcular la densidad de la corriente magnetizante se tienen que tener el número de
onda espacial kn y (ver Figura 4-2).
Figura 4-2. Programa para calcular la densidad de corriente magnetizante la fuente de CD.
Para continuar se requieren las condiciones de contorno en la fuente de corriente directa las
cuales se determinan mediante las ecuaciones (3-6) y (3-7), (ver Figura 4-3).
Figura 4-3. Establecimiento de las condiciones de contorno en la fuente de CD.

58
Una vez obtenidas las condiciones de contorno, se puede determinar y
, que representan
el vector de potencial magnético en los límites, (ver Figura 4-4) (ver Apéndice I).
Figura 4-4. Programa para calcular el vector de potencial magnético en los limites (d) y (e).
Para dicho vector se establece la solución general, en la función de la Figura 4-5.
Figura 4-5. Solución general del vector del vector de potencial magnético en los limites (d) y (e).
La solución general está dada como una sumatoria infinita, que para fines prácticos se limita
hasta veinte valores. Una vez obtenido esto se aplican las ecuaciones (3-6) y (3-7)
respectivamente (ver Figura 4-6).
Figura 4-6. Cálculo de las densidades de flujo tangencial y normal en el límite (e).
Una vez que se obtiene la densidad de flujo se procede a introducir los datos establecidos para
del motor, (ver Figura 4-7).

59
Figura 4-7. Datos del motor.
4.2.2 Gráfica de la densidad de flujo de a componente tangencial en el límite (e).
Una vez que se introducen los datos del motor, se manda a imprimir el resultado, el cual se
expresa como BxnP. Se utiliza el comando ExpandNumerator ya que el resultado lo da en forma
factorizada y lo expresa como una fracción donde el denominador es uno. El comando Chop se
utiliza para que la parte imaginaria que es una fracción se pueda aproximar a valores a cero o a
un numero entero. Para tomar los valores se utiliza la parte real, la cual se escribe de forma
manual y luego se grafica.
Figura 4-8. Gráfica de a densidad de flujo de la componente tangencial en el límite (e).

60
4.2.3 Gráfica de la densidad de flujo de a componente normal en el límite (e).
Para poder graficar la componente normal se realiza lo mismo que para el caso de la componente
tangencia, solo para que para Byn y se grafica.
Figura 4-9. Gráfica de la densidad de flujo de la componente normal en el límite (e).
4.2.4 Gráfica de la densidad de flujo de a componente tangencial y normal en el límite (e).
Una vez obteniendo los resultados de las densidades de flujo se puede observar los en la
componente tangencial que es aproximadamente de orden de las seis milésimas, y la componente
tangencial es de aproximadamente cuatro décimas. Se grafican los dos valores para que se
visualice y se pueda comparar los valores tangencial y normal (ver Figura 4-10).
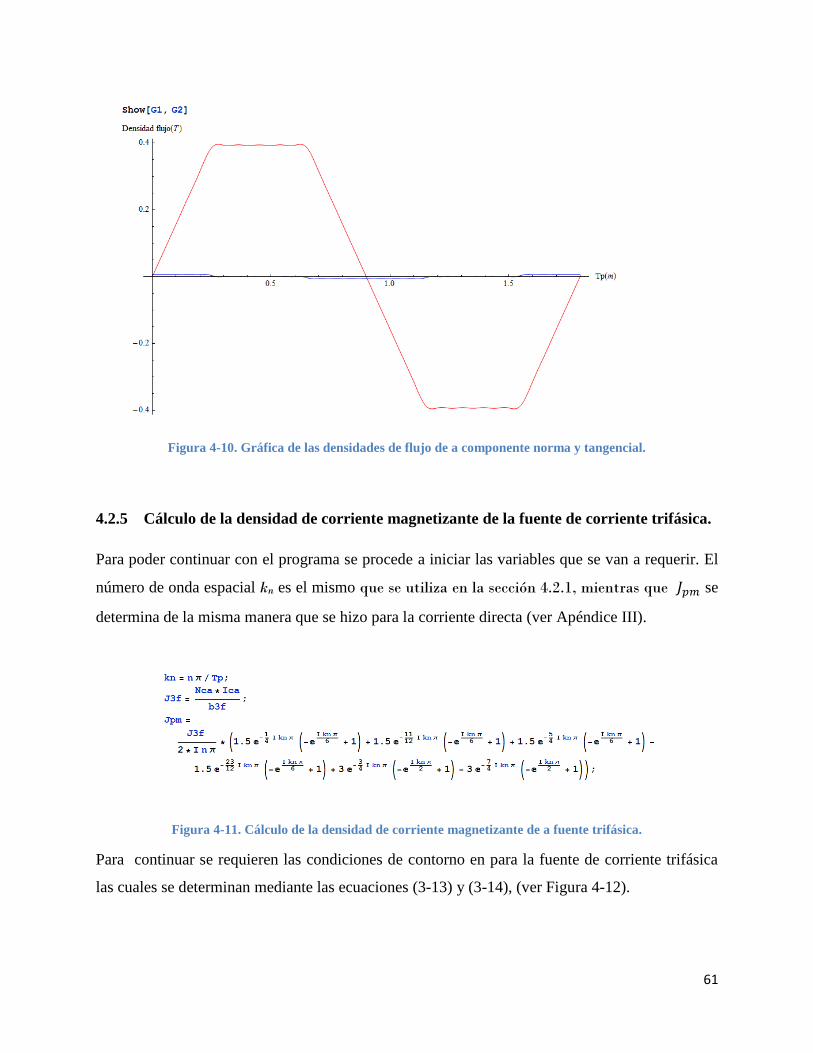
61
Figura 4-10. Gráfica de las densidades de flujo de a componente norma y tangencial.
4.2.5 Cálculo de la densidad de corriente magnetizante de la fuente de corriente trifásica.
Para poder continuar con el programa se procede a iniciar las variables que se van a requerir. El
número de onda espacial kn es el mismo que se utiliza en la sección 4.2.1, mientras que se
determina de la misma manera que se hizo para la corriente directa (ver Apéndice III).
Figura 4-11. Cálculo de la densidad de corriente magnetizante de a fuente trifásica.
Para continuar se requieren las condiciones de contorno en para la fuente de corriente trifásica
las cuales se determinan mediante las ecuaciones (3-13) y (3-14), (ver Figura 4-12).
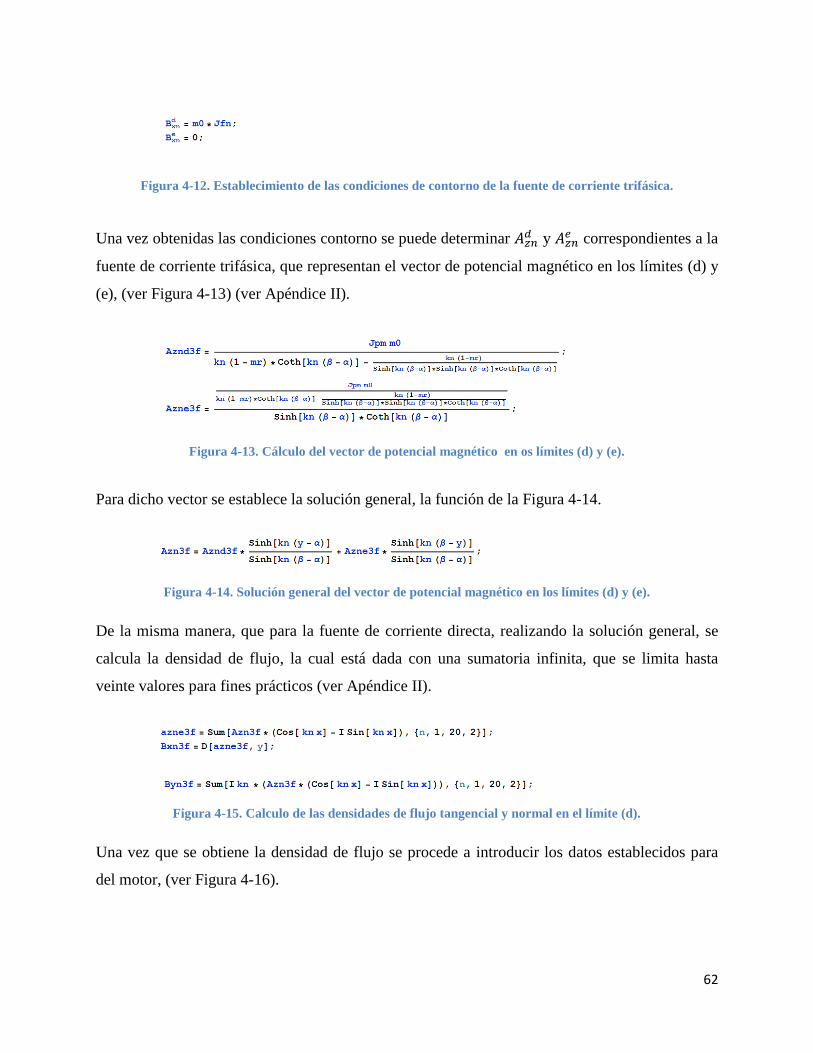
62
Figura 4-12. Establecimiento de las condiciones de contorno de la fuente de corriente trifásica.
Una vez obtenidas las condiciones contorno se puede determinar y
correspondientes a la
fuente de corriente trifásica, que representan el vector de potencial magnético en los límites (d) y
(e), (ver Figura 4-13) (ver Apéndice II).
Figura 4-13. Cálculo del vector de potencial magnético en os límites (d) y (e).
Para dicho vector se establece la solución general, la función de la Figura 4-14.
Figura 4-14. Solución general del vector de potencial magnético en los límites (d) y (e).
De la misma manera, que para la fuente de corriente directa, realizando la solución general, se
calcula la densidad de flujo, la cual está dada con una sumatoria infinita, que se limita hasta
veinte valores para fines prácticos (ver Apéndice II).
Figura 4-15. Calculo de las densidades de flujo tangencial y normal en el límite (d).
Una vez que se obtiene la densidad de flujo se procede a introducir los datos establecidos para
del motor, (ver Figura 4-16).
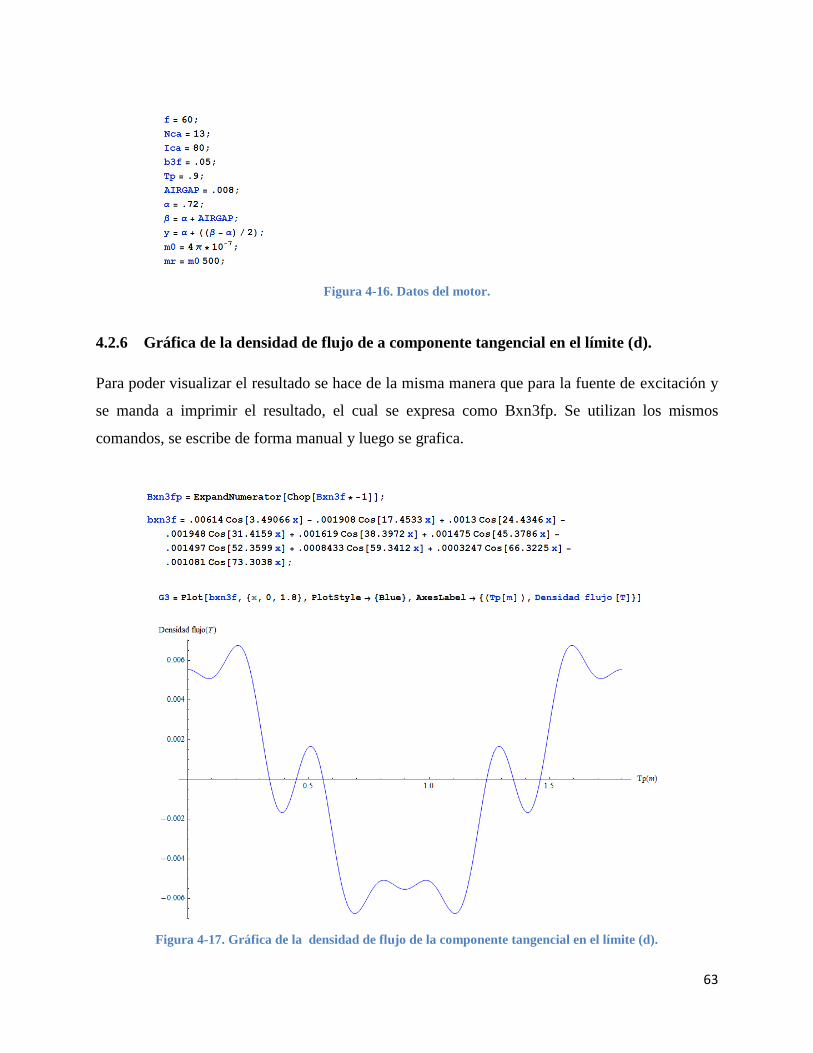
63
Figura 4-16. Datos del motor.
4.2.6 Gráfica de la densidad de flujo de a componente tangencial en el límite (d).
Para poder visualizar el resultado se hace de la misma manera que para la fuente de excitación y
se manda a imprimir el resultado, el cual se expresa como Bxn3fp. Se utilizan los mismos
comandos, se escribe de forma manual y luego se grafica.
Figura 4-17. Gráfica de la densidad de flujo de la componente tangencial en el límite (d).

64
4.2.7 Gráfica de la densidad de flujo de a componente normal en el límite (d).
Para poder graficar la componente normal By3fp se realiza lo mismo solo para que para Bx3fp.
Figura 4-18. Gráfica de la densidad de la componente normal en el límite (d).
4.2.8 Gráfica de la densidad de flujo de a componente tangencial y normal en el límite (d).
Una vez obteniendo los resultados de las densidades de flujo se puede observar que la
componente tangencial que es aproximadamente del orden de las seis milésimas, y la
componente tangencial es de casi cuatro décimas. Se grafican los dos valores para que se
visualice y se pueda comparar los valores tangencial y normal.

65
Figura 4-19. Gráfica de la densidad de flujo normal y tangencial en el límite (d).
4.3 Cálculo de la fuerza de tracción.
Para el cálculo de la fuerza de tracción es sumamente importante conocer las densidades de flujo
del primario y del secundario, ya que estas, tanto el flujo normal como el tangencial se suman
para obtener la densidad de flujo normal y tangencial total, dividiendo entre se obtiene el
campo, el cual se determina mediante la ecuación (3-23). Dado que ya conocemos las densidades
de flujo normal y tangencial se puede obtener el campo magnético de forma directa.
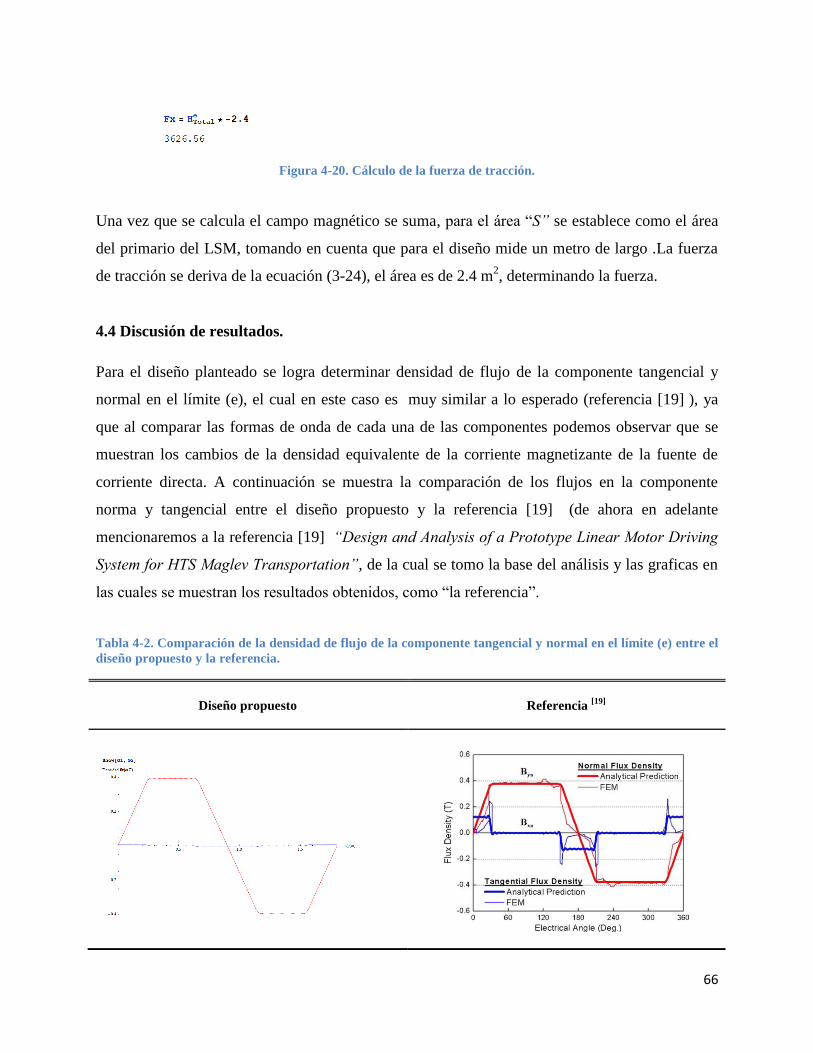
66
Figura 4-20. Cálculo de la fuerza de tracción.
Una vez que se calcula el campo magnético se suma, para el área “S” se establece como el área
del primario del LSM, tomando en cuenta que para el diseño mide un metro de largo .La fuerza
de tracción se deriva de la ecuación (3-24), el área es de 2.4 m2, determinando la fuerza.
4.4 Discusión de resultados.
Para el diseño planteado se logra determinar densidad de flujo de la componente tangencial y
normal en el límite (e), el cual en este caso es muy similar a lo esperado (referencia [19] ), ya
que al comparar las formas de onda de cada una de las componentes podemos observar que se
muestran los cambios de la densidad equivalente de la corriente magnetizante de la fuente de
corriente directa. A continuación se muestra la comparación de los flujos en la componente
norma y tangencial entre el diseño propuesto y la referencia [19] (de ahora en adelante
mencionaremos a la referencia [19] “Design and Analysis of a Prototype Linear Motor Driving
System for HTS Maglev Transportation”, de la cual se tomo la base del análisis y las graficas en
las cuales se muestran los resultados obtenidos, como “la referencia”.
Tabla 4-2. Comparación de la densidad de flujo de la componente tangencial y normal en el límite (e) entre el
diseño propuesto y la referencia.
Diseño propuesto
Referencia [19]

67
Nótese que en la Tabla 4-2, el diseño propuesto muestra la cresta en casi 0.4 T, similar a la que
se muestra en la referencia, para poder obtener este valor similar o muy cercano se propusieron
las dimensiones básicas del motor considerando la teoría y las referencias de algunas
dimensiones mencionadas en los artículos, como la dimensión entrehierro, la dimensión del paso
polar, las dimensiones de las zapatas, etc. Finamente se fue variando el valor de la corriente y del
número de espiras para poder acercarnos al valor buscado, esto partiendo de modelos propuestos
anteriormente.
La grafica del modelo propuesto fue graficada en función de paso polar para observar como seria
el comportamiento en el motor, por lo cual el flujo tangencial pareciera que no es de la misma
amplitud, pero si tomamos como referencia la densidad de flujo normal en cada una de las
graficas veremos que los cambios mostrados se realizan en el mismo punto de la densidad de
flujo normal.
Para la densidad de flujo de la componente tangencial y normal en el límite (d) se tiene que
determinar el coeficiente de Fourier ya que la referencia no lo proporciona, ver Apéndice III,
obteniendo el coeficiente se realiza el programa con las condiciones de frontera para el limite (d).
Se determinan los coeficientes y se comparar con la referencia.
Tabla 4-3. Comparación de la densidad de flujo de la componente tangencial y normal en el límite (d) entre el
diseño propuesto y la referencia.
Diseño propuesto
Referencia [19]

68
Nótese que para las componentes obtenidas no son idénticas a las de a referencia, pero se puede
observar que la forma fundamental es muy similar para poder obtener un resultado más
aproximado se recomienda que se estudie o se analice más a fondo la densidad equivalente de la
corriente magnetizante de la fuente trifásica para poder determinar cuál es la razón del por qué
no se obtiene conforme a la referencia. No se te que el programa fue realizado en el software
Matemática, se recomienda realizarlo en otro software y observar si se sigue obteniendo el
mismo resultado. A un qué tal vez el problema no se encuentre ahí si no el tipo de computadora
que se hizo el programa, ya que se recomienda que este tipo de análisis se realicen en
supercomputadoras, las cuales cuentan con una gran capacidad para poder realizar las
operaciones sin problemas como los que se tuvieron con los datos flotantes, esto también pude
ser el causante de que el resultado no se obtenga como se espera.

69
Capítulo 5
Concusiones
Se logra determinar el flujo normal y tangencial para la fuente de corriente directa el cual se
puede observar en la Figura 4-10. Se puede observar que la densidad de flujo es similar a la
referencia [19] ya que para la densidad de corriente magnetizante se toma el coeficiente de
Fourier que se plantea en la ecuación (3-9).
Para el flujo normal y tangencial de la fuente de corriente trifásica no se logra determinar
conforme a la referencia [19] ya que se cree que el coeficiente de Fourier determinado para la
densidad de corriente magnetizante no es calculado correctamente, aun cuando se siguen
correctamente los pasos para determian el coeficiente de Fourier, ya que a la hora de graficar el
resultado de la densidad de la componente normal en el límite (d) se puede observar que no se
expresa como la de la referencia [19] ya que no se obtienen los cambios de la densidad de flujo
de la componente normal. Se cree que la resultante de la densidad de la componente normal
cuenta con un desfasamiento con respecto a la densidad de corriente magnetizante obtenida. Se
recomienda realizar el programa a una computadora superior a 64 bites, ya que a la hora de

70
realizar el programa (en una computadora de 64 bites) se manejan números flotantes de gran
tamaño y llega el momento que la computadora no es capaz de correr todas las cifras y se tienen
que copiar a mano los datos lo cual puede afectar como distorsión del resultado al no manejar
todas las cifras significativas.
Se logra proponer un diseño del motor síncrono lineal el cual puede ser utilizado para impulsar
un tren de levitación magnética, sus características se muestran en la Tabla 4-1 y en la Figura 4-1
para el cual se proponen las dimensiones especificadas, el diseño se constituye de laminaciones
de acero al 4% silicio de grano orientado, Las dimensiones del motor síncrono lineal fueron
propuestas tomando como base las dimensiones de modelos ya planteados, principalmente la del
entrehierro ya que a menor distancia se tiene mayor interacción de flojo entre el primario y el
secundario, también se tomó en cuenta el criterio de la suspensión electromagnética en la cual se
manejan distancias pequeñas para tener un mejor control a baja y alta velocidad. Las
dimensiones del paso polar fueron determinadas en 0.5 m una vez que se observó que a partir de
0.5 m solo influye en el periodo de la onda viajera. El largo del primario es propuesto de acuerdo
al esquema planteado para el LSM el cual es capaz de alojar el devanado trifásico.
El paso polar se puede variar, de tal forma que aumenta o disminuye el periodo de la onda
viajera ya que depende de los eslabonamientos del flujo magnético de tal forma que la onda
viajera es directamente proporcional al paso polar, aunque el paso polar sí influye en el cálculo
de las densidades de flujo, solo se ve reflejado en valores pequeños del paso polar (para el diseño
propuesto), ya que para valores mayores a 0.5 metros de paso polar solo se refleja en el periodo
de la onda viajera. Esto se observa en el programa al ir variando los valores del paso polar, ya
que a menor paso polar (para valores menores a 0.5 m) se tiene mayor interacción de flujo pero
la amplitud de la onda viajera es menor.
Para las regiones que se analizan (primario y secundario) en los cálculos de los flujos magnéticos
no se determina como tal la cantidad de acero necesaria (láminas de acero al silicio de grano
orientado) , se observa que no influye en dicho calculo si se aumenta o disminuye la distancia del
primario y el secundario, al igual no que no influye para el cálculo de la fuerza de tracción
aunque se tiene que considerar las dimensiones, ya que si no se cuenta con suficiente material
ferromagnético solo se saturaría y se tendrían grandes cantidades de pérdidas por corrientes de
histéresis. El entrehierro es una de las partes importantes ya que va ligado directamente al

71
cálculo de las densidades de flujo al igual que para la fuerza de tracción, entre más distancia se
tenga en el entrehierro habrá menos interacción de flujo entre el primario y el secundario. Por lo
cual el entrehierro juega un papel muy importante en el diseño del motor.

72
Recomendaciones Para Trabajos Futuros.
Se recomienda realizar un análisis más completo del diseño del motor síncrono lineal. En el cual
se tomen en cuenta todos los parámetros del motor lineal, principalmente para cuantificar las
pérdidas eléctricas en el motor, ya que estas no fueron estudiadas, tanto en el análisis del LSM
planteado como en el diseño propuesto. Una vez estudiadas las pérdidas e implementadas en el
diseño del motor lineal se tendrá un modelo mejor diseñado.
Sería importante hacer un estudio de la levitación, suspensión, orientación y diseñar un
generador para que lleve a cabo la transferencia de energía al vehículo, con esto se tendría un
modelo completo del motor lineal.
Como segunda propuesta se recomienda realizar un prototipo una vez que se hayan incluido las
pérdidas del diseño del motor síncrono lineal planteado. Esto con el fin de realizar pruebas sobre
este y ver cuáles son los valores reales de los parámetros calculados y poder observar cómo se
comporta. Realizar pruebas de comportamiento, de parámetros eléctricos, de eficiencia y de
operación en diferentes condiciones ambientales.
Realizar un estudio costo-beneficio para el diseño propuesto, una vez que se haya mejorado.
También sería importante estudiar en que lugares se puede implementar un tren de este tipo,
cuales son los lugares más transitados en transporte y cuáles son las distancias que se recorren,
con esto se podrá estimar si es factible hacer una inversión y en qué tiempo se recuperaría una
inversión.

73
Referencias.
[1] H.W. Cho, H. K. Sung, S. Y. Sung, D. J. You, and S. M. Jang, “Design and
Characteristic Analysis on the Short-Stator Linear Synchronous Motor for High-Speed
Maglev Propulsion”, IEEE Trans. Magn., Vol. 44, No.11, November 2008.
[2] E. R. Laithwaite, F. T. Barwell, “Linear Induction Motors For High-Speed Railways”,
Electronics and Power, April 1964.
[3] R. D. Thornton, “Magnetic Levitation and Propulsion, 1975”, IEEE Trans. Magn., Vol.
MAG-44, No. 4, July 1975.
[4] H. W. Lee, K. C. Kim, and J. Lee, “Review of Maglev Train Technologies”, IEEE
Trans. Magn., Vol. 42, No. 7, July 2006.
[5] <http://www.maglev.net/news/hermann-kemper-maglev-genius/>
[6] "Obituary for the late Professor Eric Laithwaite", Daily Telegraph, 6 December 1997.
<http://keelynet.com/gravity/laithobi.htm>
[7] <http://www.transrapid.de/cgi/en/basics.prg?session=94cc345a4fa9d789_108664>
[8] S. Yamamura, “Magnetic Levitation Technology Of Tracked Vehicles Present Status
and prospects”, IEEE Trans. Magn., Vol. MAG-12, No. 6, November 1976.
[9] K. Wako, “Magnetic Levitation (Maglev) Technologies”, Technology, October 2000.
[10] C. M. Francis, “Superconducting Levitation, Application to Bearings and Magnetic
Transportation”, WILEY-VCH Verlag GmbH & Co. KGaA,Weinheim, 2004, pag.
221-230.
[11] <http://en.wikipedia.org/wiki/JR%E2%80%93Maglev>
[12] B. C. Shin, D. Y. Park, S. Baik, H. S. Kang, “Status of Korea's Urban Maglev
Program”, Center for Urban Maglev Program, Korea Institute of Machinery and
Materials, Daejon, Korea. No. 50.
[13] “New Scientist”, 28 June 197, Vol. 58, No. 852, Pag. 805.
74
[14] S. Gurol, R. Baldi, D. Bever, R. Post, “Status of The General Atomics Low Speed
Urban Maglev Technology Development Program”, Lawrence Livermore National
Laboratory (LLNL), June 17, 2004.
[15] S. Gurol and B. Baldi, R. Post, “General Atomics Urban Maglev Program Status”, No.
99
[16] <http://es.wikipedia.org/wiki/Levitaci%C3%B3n>
[17] <http://es.wikipedia.org/wiki/Superconductividad>
[18] <http://en.wikipedia.org/wiki/Halbach_array>
[19] Y. G. Guo, J. X. Jin, J. G. Zhu, H. Y. Lu, “Design and Analysis of a Prototype Linear
Motor Driving System for HTS Maglev Transportation”, IEEE Tans. Appli.
Superconductivity, Vol. 17, No. 2, June 2007.

75
Apéndice I. Deducción del vector de potencial magnético en
los limites (d) y (e) para la fuente de corriente directa.
𝝁 𝝁𝒓𝝁𝟎
𝑩𝒙𝒏𝒇 𝝁𝒓 𝑩𝒙𝒏
𝒆
𝑩𝒙𝒏𝒆 − 𝑩𝒙𝒏
𝒇 𝝁𝟎 𝑱𝒇𝒏
𝑩𝒙𝒏𝒆 − 𝝁𝒓 𝑩𝒙𝒏
𝒆 𝝁𝟎 𝑱𝒇𝒏
𝑩𝒙𝒏𝒆 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒇𝒏
𝑩𝒙𝒏𝒄 𝝁𝒓 𝑩𝒙𝒏
𝒅
𝑩𝒙𝒏𝒅 − 𝑩𝒙𝒏
𝒄 𝟎
𝑩𝒙𝒏𝒅 − 𝝁𝒓 𝑩𝒙𝒏
𝒅 𝟎
𝑩𝒙𝒏𝒅 𝟏 − 𝝁𝒓 𝟎

76
𝑩𝒙𝒏𝒅
𝑨𝑨𝟏
𝟏
𝑩𝒙𝒏𝒆
𝒌𝒏
𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 −
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 −𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝑨𝑨𝟏
𝟏
𝑨𝒛𝒏𝒆
𝑩𝒙𝒏𝒅 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒅 −𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆
𝑩𝒙𝒏𝒆 𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 −
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟏 − 𝝁𝒓 𝟎
𝒌𝒏 𝑨𝒛𝒏𝒅 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒌𝒏𝑨𝒛𝒏
𝒆𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝟎
𝒌𝒏 𝑨𝒛𝒏𝒅 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏𝑨𝒛𝒏
𝒆𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝟎
𝑨𝒛𝒏𝒅
𝒌𝒏𝑨𝒛𝒏𝒆 𝟏𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝟏 − 𝝁𝒓
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓
𝑨𝒛𝒏𝒅
𝑨𝒛𝒏𝒆
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝑨𝒛𝒏𝒆
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒔𝒆𝒄 𝒌𝒏 𝜷 − 𝜶
77
𝑨𝒛𝒏𝒅
𝑨𝒛𝒏𝒆
𝟏𝒔𝒆𝒄 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝑨𝒛𝒏𝒆
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝒌𝒏 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 − 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟏 − 𝝁𝒓 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒆
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏 𝟏 − 𝝁𝒓 𝑨𝒛𝒏𝒆
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏 𝟏 − 𝝁𝒓 𝑨𝒛𝒏𝒆
𝝁𝟎 𝑱𝒇𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒆
𝝁𝟎 𝑱𝒇𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝒌𝒏 𝟏 − 𝝁𝒓
78
𝑨𝒛𝒏𝒆
𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒌𝒏 𝟏 − 𝝁𝒓 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝑨𝒛𝒏𝒆
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅
𝝁𝟎 𝑱𝒇𝒏
𝒌𝒏 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒌𝒏 𝟏 − 𝝁𝒓 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶

79
Apéndice II. Deducción del vector de potencial magnético en
los limites (d) y (e) para la fuente de corriente trifásica.
𝝁 𝝁𝒓𝝁𝟎
𝑩𝒙𝒏𝒄 𝝁𝒓 𝑩𝒙𝒏
𝒅
𝑩𝒙𝒏𝒅 − 𝑩𝒙𝒏
𝒄 𝝁𝟎 𝑱𝒑𝒎
𝑩𝒙𝒏𝒅 − 𝝁𝒓 𝑩𝒙𝒏
𝒅 𝝁𝟎 𝑱𝒑𝒎
𝑩𝒙𝒏𝒅 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝑩𝒙𝒏𝒄 𝝁𝒓 𝑩𝒙𝒏
𝒆
𝑩𝒙𝒏𝒆 − 𝑩𝒙𝒏
𝒄 𝟎
𝑩𝒙𝒏𝒆 − 𝝁𝒓 𝑩𝒙𝒏
𝒆 𝟎
𝑩𝒙𝒏𝒆 𝟏 − 𝝁𝒓 𝟎
𝑩𝒙𝒏𝒅
𝑨𝑨𝟏
𝟏
𝑩𝒙𝒏𝒆
𝒌𝒏
𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 −
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 −𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒅 𝟑𝒇
𝑨𝑨𝟏
𝟏
𝑨𝒛𝒏𝒆 𝟑𝒇
80
𝑩𝒙𝒏𝒅 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒅 −𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇
𝑩𝒙𝒏𝒆 𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟑𝒇
𝒌𝒏 𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 − 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 𝟎
𝒌𝒏𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 − 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 𝟎
𝒌𝒏𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏
𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 𝟎
−𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 −𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓
−𝟏 −𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 −𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇 𝟏 − 𝝁𝒓
𝒌𝒏𝑨𝒛𝒏𝟑𝒇𝒅 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒆 𝟑𝒇
𝒌𝒏𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓
𝑨𝒛𝒏𝒆 𝟑𝒇
𝒌𝒏𝑨𝒛𝒏𝒅 𝟑𝒇 𝟏 − 𝝁𝒓
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶

81
𝑨𝒛𝒏𝒆 𝟑𝒇
𝑨𝒛𝒏𝒅 𝟑𝒇
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒅 𝟑𝒇 −
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝑨𝒛𝒏𝒆 𝟑𝒇 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝒌𝒏 𝑨𝒛𝒏𝒅 𝟑𝒇𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 − 𝒌𝒏𝑨𝒛𝒏
𝒆 𝟑𝒇𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝒌𝒏 𝑨𝒛𝒏𝒅 𝟑𝒇𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏𝑨𝒛𝒏
𝒆 𝟑𝒇𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝒌𝒏 𝑨𝒛𝒏𝒅 𝟑𝒇𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏
𝑨𝒛𝒏𝒅 𝟑𝒇
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝑨𝒛𝒏𝒅 𝟑𝒇 𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝟏
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝝁𝟎 𝑱𝒑𝒎
𝑨𝒛𝒏𝒅 𝟑𝒇
𝝁𝟎 𝑱𝒑𝒎
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒆 𝟑𝒇
𝑨𝒛𝒏𝒅
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶
𝑨𝒛𝒏𝒆 𝟑𝒇
𝝁𝟎 𝑱𝒑𝒎
𝒌𝒏 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝟏 − 𝝁𝒓 𝒌𝒏 𝟏 − 𝝁𝒓
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶 𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶
𝒔𝒊𝒏 𝒌𝒏 𝜷 − 𝜶 𝒄𝒐𝒕 𝒌𝒏 𝜷 − 𝜶

82
Apéndice III. Densidad de corriente magnetizante para la
fuente de corriente trifásica.
Figura III-1. Determinación de la grafica resultante de la densidad equivalente de la corriente magnetizante de la fuente trifásica.
83
Se determina la serie de furrier para la forma de onda establecida.
𝑱𝒑𝒎 𝑱𝟑𝒇
𝟐𝝅 𝟎 𝒆 𝑰𝒌𝒏𝒙
𝟏𝟏𝟐𝝅
𝟎
𝒅𝒙 𝟏 𝒆 𝑰𝒌𝒏𝒙𝟑𝟏𝟐𝝅
𝟏𝟏𝟐𝝅
𝒅𝒙 𝟑 𝒆 𝑰𝒌𝒏𝒙 𝟏𝟐𝝅
𝟑𝟏𝟐𝝅
𝒅𝒙 𝟏 𝒆 𝑰𝒌𝒏𝒙𝟏𝟏𝟏𝟐𝝅
𝟏𝟐𝝅
𝒅𝒙 𝟎 𝒆 𝑰𝒌𝒏𝒙𝟏𝟑𝟏𝟐𝝅
𝟏𝟏𝟏𝟐𝝅
𝒅𝒙
−𝟏 𝒆 𝑰𝒌𝒏𝒙𝟏 𝟏𝟐𝝅
𝟏𝟑𝟏𝟐𝝅
𝒅𝒙 −𝟑 𝒆 𝑰𝒌𝒏𝒙𝟐𝟏𝟏𝟐𝝅
𝟏 𝟏𝟐𝝅
𝒅𝒙 −𝟏 𝒆 𝑰𝒌𝒏𝒙𝟐𝟑𝟏𝟐𝝅
𝟐𝟏𝟏𝟐𝝅
𝒅𝒙 −𝟎 𝒆 𝑰𝒌𝒏𝒙𝟐 𝟏𝟐𝝅
𝟐𝟑𝟏𝟐𝝅
𝒅𝒙
Para resolver se realiza en Mathematica.

84
Obteniendo así:
𝑱𝒑𝒎 𝑱𝟑𝒇
𝟐𝝅 −
𝟏 𝒊𝒆 𝟏 𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅
𝒏−𝟏 𝒊𝒆
𝟏𝟏𝟏𝟐𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅
𝒏−𝟏 𝒊𝒆
𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅
𝒏
−𝟏 𝒊𝒆
𝟐𝟑𝟏𝟐𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅
𝒏−𝟑𝒊𝒆
𝟑 𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅𝟐
𝒏−𝟑𝒊𝒆
𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅𝟐
𝒏
𝑱𝒑𝒎 𝑱𝟑𝒇
𝟐𝒏𝝅 −𝟏 𝒊𝒆
𝟏 𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅 − 𝟏 𝒊𝒆
𝟏𝟏𝟏𝟐𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅 − 𝟏 𝒊𝒆
𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅
− 𝟏 𝒊𝒆 𝟐𝟑𝟏𝟐𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅 − 𝟑𝒊𝒆
𝟑 𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅𝟐 − 𝟑𝒊𝒆
𝑰𝒌𝒏𝝅 −𝟏 𝒆
𝑰𝒌𝒏𝝅𝟐
𝑱𝒑𝒎 𝑱𝟑𝒇
𝟐𝑰𝒏𝝅 𝟏 𝒆
𝟏 𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅 𝟏 𝟏 𝒆
𝟏𝟏𝟏𝟐𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅 𝟏 𝟏 𝒆
𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅 𝟏 − 𝟏 𝒆
𝟐𝟑𝟏𝟐𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅 𝟏
𝟑𝒆 𝟑 𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅𝟐 𝟏 − 𝟑𝒆
𝑰𝒌𝒏𝝅 −𝒆
𝑰𝒌𝒏𝝅𝟐 𝟏