SINTONIZADORES DE CONTROL
27
Ingeniería en Automatización Automatización de procesos Grupo 01 INFORME 1 SINTONIZADORES DE CONTROL Luis Alejandro Rodriguez Garcia 1 Julián Ricardo González Barreto 2 RESUMEN El diseño de un control es fundamental para conocer el comportamiento de un sistema o planta, logrando reconocer los parámetros que identifican el funcionamiento adecuado de un proceso de control. Hay una gran cantidad de modelos de diseño que permiten reconocer los parámetros del controlador, estos parámetros se ajustan para obtener una respuesta aceptable. Los métodos de sintonización como re verán a lo largo de este laboratorio, permiten realizar estudios experimentales que llevan a encontrar los parámetros de diseño como punto de inicio, ajustándolos con la sintonización se puede obtener la respuesta deseada para el control del proceso. En este laboratorio se hará la representación de los diferentes modelos de sintonización para un sistema de control de flujo de primer orden en un lazo de control realimentado. Previamente se realizó una identificación de modelos de sintonización de primer orden sobre un ejemplo ya establecido, para adquirir fundamentar lo que se lleva acabo sobre el control de la válvula, todo con la ayuda del software Matlab. OBJETIVO Ajustar y sintonizar la planta experimental del sistema de control de flujo. Identificar y graficar los modelos de sintonización Encontrar los parámetros de sintonización dado el comportamiento de caudal de la válvula de control. Escoger el modelo de sintonización adecuado para hallar la función de transferencia de la planta. Implementar cada uno de los parámetros de sintonización de un controlador 1 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C 2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C
-
Upload
julian-gonzalez -
Category
Documents
-
view
217 -
download
0
description
El diseño de un control es fundamental para conocer el comportamiento de un sistema o planta, logrando reconocer los parámetros que identifican el funcionamiento adecuado de un proceso de control. Hay una gran cantidad de modelos de diseño que permiten reconocer los parámetros del controlador, estos parámetros se ajustan para obtener una respuesta
Transcript of SINTONIZADORES DE CONTROL

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
INFORME 1
SINTONIZADORES DE CONTROL
Luis Alejandro Rodriguez Garcia1 Julián Ricardo González Barreto2
RESUMEN
El diseño de un control es fundamental para conocer el comportamiento de un sistema o planta, logrando reconocer los parámetros que identifican el funcionamiento adecuado de un proceso de control. Hay una gran cantidad de modelos de diseño que permiten reconocer los parámetros del controlador, estos parámetros se ajustan para obtener una respuesta aceptable. Los métodos de sintonización como re verán a lo largo de este laboratorio, permiten realizar estudios experimentales que llevan a encontrar los parámetros de diseño como punto de inicio, ajustándolos con la sintonización se puede obtener la respuesta deseada para el control del proceso. En este laboratorio se hará la representación de los diferentes modelos de sintonización para un sistema de control de flujo de primer orden en un lazo de control realimentado. Previamente se realizó una identificación de modelos de sintonización de primer orden sobre un ejemplo ya establecido, para adquirir fundamentar lo que se lleva acabo sobre el control de la válvula, todo con la ayuda del software Matlab.
OBJETIVO
Ajustar y sintonizar la planta experimental del sistema de control de flujo.
Identificar y graficar los modelos de sintonización
Encontrar los parámetros de sintonización dado el comportamiento de caudal de la válvula de control.
Escoger el modelo de sintonización adecuado para hallar la función de transferencia de la planta.
Implementar cada uno de los parámetros de sintonización de un controlador
Discutir y analizar los resultados obtenidos para cada controlador.
INTRODUCCION
La sintonización de un controlador PID debe contar con la información del comportamiento dinámico del proceso a controlar. Los modelos de primer orden pueden estar representados por la curva de reacción del proceso, la llamada, respuesta a una entrada escalón, esta respuesta ayuda a identificar los parámetros de sintonización del proceso de control. Entre los modelos de primer orden para la sintonización se identifican dos principales: Modelo de primer orden más tiempo muerto y el modelo de Smith, ambos modelos representados por una función de transferencia que ayudaran a reconocer los parámetros para la sintonización de un controlador. El método de Ziegler-Nichols, Dahlin e Integración mínima en presencia de perturbaciones de entrada, son los tres
1 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
métodos que se usaran y representaran para él controlador de la planta, identificando y analizando el comportamiento en cada uno de las tres.
RESULTADOS
Se presentaran los resultados obtenidos tras el desarrollo de la práctica, analizando cada una de las gráficas y resultados a partir de la implementación del código en Matlab.
Con la representación del diagrama de instrumentación, control de flujo y su evolución de flujo en el tiempo lo que se hace primero es ajustar la planta experimental. Se ajustó por los métodos de modelo de primer orden más tiempo muerto (POMTM) y Smith para obtener los parámetros de diseño de sintonización. Se tomaron los puntos de Δy y Δu respecto a la evolución de flujo en el tiempo.
Modelo de primer orden más tiempo muerto
En el caso de Δy es 23.58 ya que es el punto más alto y que está más aproximado al final de la señal, para Δu es 1 ya que hay una perturbación en escalón ascendente del control de la válvula.
Para hallar t25, t50 y t75 se hace con la ecuación:
Entonces:
Ya teniendo estos puntos se ubican se halla Kp con la siguiente ecuación:
Después se calcula el tm, T y Gm:
2 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Código implementado:
clear all close allclcload Datoss=tf('s')plot(T,Yf,'r')Y= 22.9u= 1t25=10.1t50=14.5t75=23.5Kp=Y/uT=0.9102*(t75-t25)tm=(1.2620*t25)-(0.2620*t75)Gm=(Kp*exp(-tm*s))/(T*s+1)hold onstep (Gm,'b')
Figura 1 Señal ajustada por el método de modelo de primer orden más tiempo muerto (POMTM)
En la figura 2 se observa el ajuste que se hizo por el método mencionado, cabe aclarar que acá solo es ajuste sin una sintonización de control.
Se obtiene la función de transferencia por medio de Matlab:
Todo esto mencionado se hace en el software Matlab para un mayor entendimiento de lo que está sucediendo en el sistema al momento de ajustar por el método que se planteó.
Error de método de tiempo muerto: 82.8039
tt=[1:0.1:120];
3 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
[y5,t5]=step(Gm,tt)Error=(sum((Yf-y5).^2))
Se hace la sintonización usando el método de Ziegler-Nichols a lazo.
Tabla 1 Parámetros de ajuste propuestos por Ziegler-Nichols
Controlador Parámetro de ajuste Ecuación
Proporcional (P)
Proporcional +Integral (PI)
Proporcional + Integral + Derivativo (PID)
Código implementado para el proporcional:
Kp1=(1/Kp)*(tm/T)^-1Gc1= Kp1
Overshot 0.274, se establece en 0.648 en 87.9s
4 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 2 Respuesta para el control proporcional
Código implementado para el proporcional + integral (PI)
Kp2=(0.9/Kp)*((tm/T)^-1)Ti=3.33*tmKi=Kp2/TiGc2=Kp2+(Ki/s)
Overshot 0.3 y se establece en 1 y 179s
Figura 3 Respuesta para el control proporcional + integral
Código implementado para el proporcional + integral + derivativo (PID)
Kp3=(1.2/Kp)*(tm/T)^-1Ti1=2.0*tmtd=tm/2Ki1=Kp3/Ti1
5 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Kd=Kp3*tdGc3=Kp3+(Ki1/s)+Kd*s
Overshot 0.52, se establece en 1 en 115s
Figura 4 Respuesta para el control proporcional + integral + derivativo
Figura 5 Sintonización controladores P, PI, PID
Sintonización del controlador por el método de Dahlin
Tabla 2 Parámetros de ajuste propuestos por Dahlin
Controlador Parámetros de ajuste Ecuación
Proporcional + Integral + Derivativo (PID)
6 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Código implementado para el proporcional + integral + derivativo (PID)
Kp2= (1.2/(2*(Kp)))*((tm/T)^-1)t2=TTd=tm/2Ki2=Kp2/t2Kd=Kp2*TdGc1=Kp2+(Ki2/s)+Kd*s
Overshot 0.03 y se establece en 1 y en 119s
Figura 6 Sincronización PID por el método de Dahlin
Por último se hace la sintonización para integración mínima en presencia de perturbación de entrada. Este tipo de sintonización se hace por medio de la siguiente tabla:
Tabla 3 Sintonización para Integración Mínima en presencia de perturbaciones de entrada
Controlador Parámetro IEC IAE IAET
Proporcional (P)
Proporcional + Integral (PI)
7 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Proporcional + Integral +
Derivativo (PID)
a2=0.842
Código implementado para el proporcional IEC
a=1.411b=-0.917Kp1=(a/Kp)*(tm/T)^b
Overshot 0.478 se estable en 0.712 y 193s
Figura 7 Control proporcional IEC
Código implementado para el proporcional IAE
a=0.902b=-0.985Kp1=(a/Kp)*(tm/T)^b
Overshot 0.213 se establece en 0.62 y 93.1s
8 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 8 Control proporcional IAE
Código implementado para el proporcional IAET
a=0.490b=-1.084Kp1=(a/Kp)*(tm/T)^b)
Overshot 0.047 se establece en 0.4491 y 47.7s
Figura 9 Control proporcional IAET
Código implementado para el proporcional + integral IEC
9 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
a1=1.305b1=-0.959a2=0.492b2=-0.739Kp1=(a1/Kp)*(tm/T)^b1Ti=(T/a2)*(tm/T)^b2Ki=Kp1/TiGc1=Kp1+(Ki/s)
Overshot 0.32 se establece en 1 con 295s
Figura 10 Control proporcional + integral IEC
Código implementado para el proporcional + integral IAE
a1=0.984b1=-0.986 a2=0.608b2=-0.0707Kp1=(a1/Kp)*(tm/T)^b1Ti=(T/(a2))*((tm/T)^b2)Ki=Kp1/TiGc1=Kp1+(Ki/s))
Overshot 0.22 se establece en 1 con 101s
10 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 11 Control proporcional + integral IAE
Código implementado para el proporcional + integral IAET
a1=0.859b1=-0.977a2=0.674b2=-0.680
Overshot 0.03 se establece en 1 con 199s
Figura 12 Control proporcional + integral IAET
Código implementado para el proporcional + integral + derivativo IEC
a1=1.495b1=-0.945
11 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
a2=1.101b2=-0.771a3=0.560b3=1.006
Figura 13 Control proporcional + integral + derivativo IEC
Código implementado para el proporcional + integral + derivativo IAE
a1=1.435b1=-0.921a2=0.878b2=-0.749a3=0.482b3=1.137Kp2=(a1/Kp)*(tm/T)^b1Ti=(T/a2)*(tm/T)^b2Td=(a3*T)*(tm/T)^b3Ki=(Kp2/Ti)Kd=Kp2*TdGc1=Kp2+(Ki/s)+(Kd*s)
Figura 14 Control proporcional + integral + derivativo IAE
12 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Código implementado para el proporcional + integral + derivativo IAET
a1=1.357b1=-0.947a2=0.842b2=-0.738a3=0.381b3=0.995
Figura 15 Control integral + proporcional + derivativo IAET
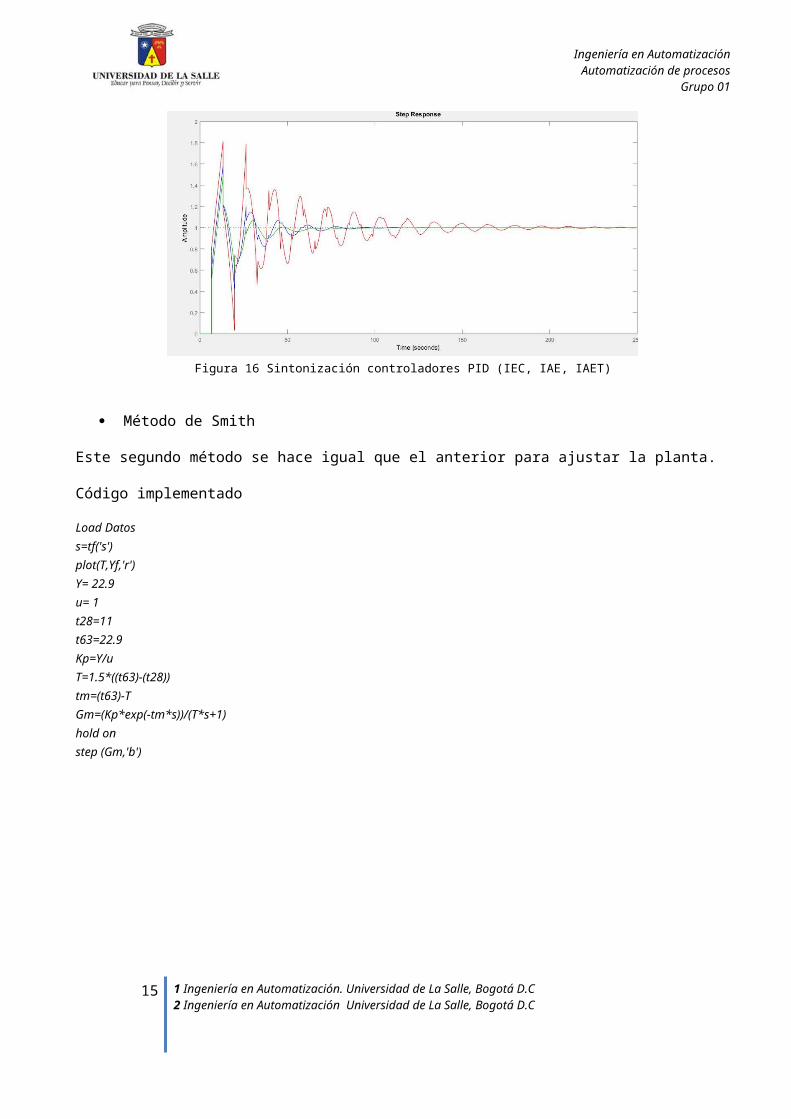
Figura 16 Sintonización controladores PID (IEC, IAE, IAET)
Método de Smith
Este segundo método se hace igual que el anterior para ajustar la planta.
Código implementado
Load Datoss=tf('s')plot(T,Yf,'r')Y= 22.9u= 1t28=11
13 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
t63=22.9Kp=Y/uT=1.5*((t63)-(t28))tm=(t63)-TGm=(Kp*exp(-tm*s))/(T*s+1)hold onstep (Gm,'b')
Figura 17 Señal ajustada por el método de modelo de Smith
Ya teniendo la señal ajustada por el método de Smith se hace la sintonización de los tres métodos de controladores.
Error:
Sintonización por Ziegler-Nichols
Figura 18 Respuesta para el control proporcional
14 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C
Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
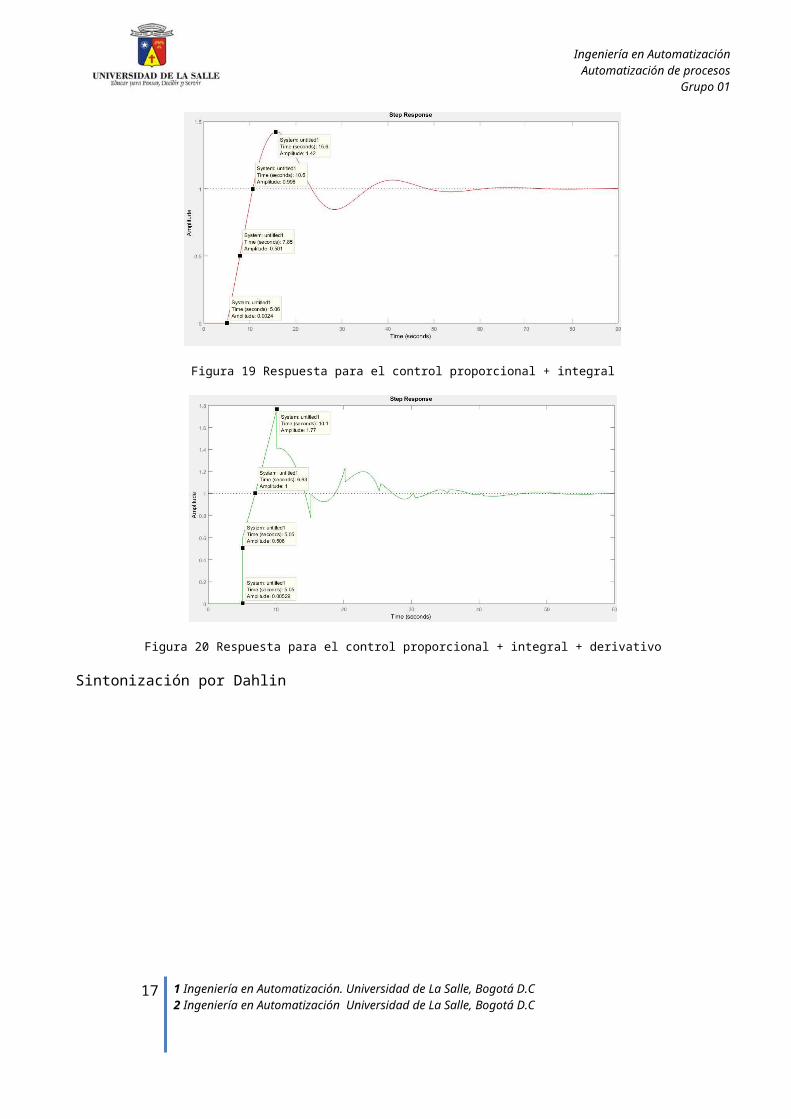
Figura 19 Respuesta para el control proporcional + integral
Figura 20 Respuesta para el control proporcional + integral + derivativo
Sintonización por Dahlin
Figura 21 Sintonización PID por el método de Dahlin
15 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Sintonización para Integración Mínima en presencia de perturbaciones de entrada
Proporcional
Figura 22 Control proporcional IEC
Figura 23 Control proporcional IAE
16 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C
Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 24 Control proporcional IAET
Proporcional + integral
Figura 25 Control proporcional + integral IEC
Figura 26 Control proporcional + integral IAE
17 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 27 Control proporcional + integral IAET
Proporcional + integral + derivativo
Figura 28 Control proporcional + integral + derivativo IEC
Figura 29 Control proporcional + integral + derivativo IAE
18 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Figura 30 Control proporcional + integral + derivativo IAET
Figura 31 Sintonización controladores PID (IEC, IAE, IAET)
ANALISIS DE RESULTADO
Para hacer un mejor análisis se tomaron los datos que más relevantes en todos los controladores que se observan en las figuras y se plasman en tablas para un mejor entendimiento:
Ziegler-Nichols
Tabla 4 Datos tomados de los controladores
Controlador Tiempo muerto
(s)
Tiempo de
sobre impulso
(s)
Tiempo de
retardo (s)
Tiempo de establecimiento
(s)
Establecimiento Overshot ERROR
P 5.07 13.9 9.49 87 0.77 0.36 Posición
PI 4.81 16 10.6 98.4 1 0.42 Controla
19 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
PID 5.05 17.7 6.95 85.5 1 0.77 Controla
Dahlin
Tabla 5 Datos tomados del controlador
Controlador Tiempo muerto
(s)
Tiempo de
sobre impulso
(s)
Tiempo de
retardo (s)
Tiempo de establecimiento
(s)
Establecimiento Overshot ERROR
PID 5.05 39.1 27.9 96.4 1 0.02 Controla
Integración Mínima en presencia de perturbaciones de entrada (Proporcional)
Tabla 6 Datos tomados de los controladores
Controlador Tiempo muerto
(s)
Tiempo de
sobre impulso
(s)
Tiempo de
retardo (s)
Tiempo de establecimiento
(s)
Establecimiento Overshot ERROR
IEC 5.07 12.9 8.65 160 0.818 0.63 Posición
IAE 5.05 14.3 10 74.1 0.763 0.267 Posición
IAET 5.06 17.3 13.3 85.5 0.727 0.067 Posición
Integración Mínima en presencia de perturbaciones de entrada (Proporcional + integral)
Tabla 7 Datos tomados de los controladores
Controlador Tiempo muerto
(s)
Tiempo de
sobre impulso
(s)
Tiempo de
retardo (s)
Tiempo de establecimiento
(s)
Establecimiento Overshot ERROR
IEC 5.05 12.7 9.6 445 1 0.41 Controla
IAE 5.09 15.2 10.7 156 1 0.3 Controla
IAET 5.05 15.3 12.6 437 1 0.08 Controla
20 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Integración Mínima en presencia de perturbaciones de entrada (Proporcional + integral + derivativo)
Tabla 8 Datos tomados de los controladores
Controlador Tiempo muerto
(s)
Tiempo de
sobre impulso
(s)
Tiempo de
retardo (s)
Tiempo de establecimiento
(s)
Establecimiento Overshot ERROR
IEC 5.05 9.98 6.12 295 1 0.85 Controla
IAE 5.07 10.1 7.25 356 1 0.58 Controla
IAET 5.05 10.3 7.41 297 1 0.52 Controla
Cuando el control se realiza por el método de sintonización dada la función de transferencia de Smith el error aumenta en los controladores, esto debido al alto error que este genera, este error se calculó tomando los datos del ajuste, con los datos entregados por la planta, en un tiempo de muestro se almacenan los datos y se aplica el error, con lo que se generó un error aproximado de 100.000, por lo que el método no es el mejor para la sintonización de la planta. Sin tener en cuenta el error, se realizó cada uno de los métodos de sintonización con la función de transferencia establecida por Smith. Se obtuvo cada uno de los valores de parámetros de tiempos de las señales, cada una de ellas muestra un valor diferente, pero podemos notar que a diferencia del método de tiempo muerto, el tiempo establecimiento es mayor, al igual que en el método muerto, el controlador proporcional tiene un error de posición, y el PID muestra mucho error. Por lo que sigue siendo el PI el mejor controlador para todo proceso.
Para este tipo de planta, es imposible usar un controlador P, debido a que se está corrigiendo el error de posición, y el proporcional no ajusta este error para la planta. Sin duda para este tipo de plantas, el mejor controlador es el PI, debido a que se realiza un ajuste de posición, es decir, el flujo de caudal para la válvula. Por otro lado el PID, es un controlador que al tener derivativo puede cambiar también la velocidad de la planta, es por eso que muchas de las sintonizaciones no tuvieron un control muy regular.Aun así el controlador más cercano fue el PID Dahlin, este controlador tiene el menor Overshot y el menor tiempo de establecimiento a comparación de los otros controladores, por lo que es el método más conveniente, a pesar que el método Smith, puede tener un menor tiempo muerto. Además gracias al que el error para el método de tiempo muerto es menor, es más probable que la planta tenga un mejor comportamiento.
CONCLUSIONES
Los modelos de sintonización son una parte fundamental para lograr entender y parametrizar los sistemas de control.
21 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C

Ingeniería en AutomatizaciónAutomatización de procesos
Grupo 01
Es importante tener la base de los modelos de sintonización previo al reconocimiento de un sistema de control de primer orden, debido a que afecta cuál de los modelos es el más apropiado para hallar los parámetros de ajuste.
Ajustando los parámetros de sintonización podemos entregar una respuesta adecuada para el funcionamiento de la planta.
La curva de reacción del proceso para plantas de primer orden, ayudan a identificar los valores y las estimaciones de cada una de las variables que se encuentran en los modelos de sintonización, para obtener una representación de la función de transferencia y los parámetros de diseño del controlador.
El diseño del controlador depende de una caracterización apropiada de los parámetros iniciales del proceso de control, esto permite que el controlador este en el rango de trabajo más adecuado.
Se optó como solución el diseño de un control PI ya que en un controlador proporcional tiene error de posición y en el PID tiene mucho error, por esta razón el que mejor se comporta por sus parámetros es el PI.
Con el controlador implementado es posible observar que se tiene un excelente control el cual aplicado en campo podría ser de bastante rendimiento y respuesta rápida.
Matlab es una herramienta operativa bastante óptima para el análisis de cualquier tipo te planta, gracias a este análisis rápido es posible resolver operaciones complicadas.
Tanto el método Smith como el método por tiempo muerto, son métodos que pueden tener para ambos casos un igual tiempo muerto, es decir, cada uno de los tiempos sin importar la sintonización del controlador, este tiempo siempre será el mismo, el cambio más notable es el tiempo de establecimiento, que para el método Smith puede ser mayor.
Estos métodos nos ayudan a comprender como puede ser el comportamiento de un controlador, dado los datos iniciales de una planta, y como extraer los parámetros importantes que ayuden a controlar de manera adecuada toda la planta.
El método Dahlin es mejor método de sintonización de controlador por los parámetros de respuesta transitoria.
22 1 Ingeniería en Automatización. Universidad de La Salle, Bogotá D.C2 Ingeniería en Automatización Universidad de La Salle, Bogotá D.C