Sistemas dinámicos
11
INSTITUTO TECNOLÓGICO DE MÉXICO INSTITUTO TECNOLÓGICO DE QUERÉTARO Introducción. Ésta práctica tiene como fin el diseño y la identificación de sistemas mecánicos. La planta fue una propuesta en clase por el profesor. Es importante tener en cuenta todos los factores, como los engranes que se utilizarán, estos son muy importantes ya que sobre este observaremos el movimiento o reacción que tendrá nuestra planta. Cabe mencionar que los engranes deben de ser de diferente tamaño para que este se tenga un mejor movimiento. En ésta práctica es necesario identificar la respuesta de la planta, así como su función de transferencia y comparar la gráfica obtenida por el osciloscopio con el software Matlab, y dar una interpretación clara de lo que sucedió. Material. Para la realización de la práctica se necesitaron de los siguientes materiales. Sistema de 3 engranes de plástico Motor de corriente directa a 12 V Potenciómetro de alambre de 5 kΩ Madera (para el soporte del mecanismo) Amplificadores operacionales TL084CN Trimpots de varios valores Resistencia de varios valores Diodos zener de 5.1 V Diodos 1N4148 Integrado 74LS14 Integrado TL494 Puente H L298N (circuito armado) Protoboards Alambre para protoboard Push-button Capacitor de poliéster Fuente de alimentación digital Multímetro digital Osciloscopio Página | 1
-
Upload
erik-alejandro-melendez -
Category
Documents
-
view
218 -
download
0
description
Reporte de simulación de sistemas dinámicos de primer, segundo y tercer orden. Con amplificadores operacionales.
Transcript of Sistemas dinámicos

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
Introducción.Ésta práctica tiene como fin el diseño y la identificación de sistemas mecánicos. La planta fue una propuesta en clase por el profesor.
Es importante tener en cuenta todos los factores, como los engranes que se utilizarán, estos son muy importantes ya que sobre este observaremos el movimiento o reacción que tendrá nuestra planta. Cabe mencionar que los engranes deben de ser de diferente tamaño para que este se tenga un mejor movimiento.
En ésta práctica es necesario identificar la respuesta de la planta, así como su función de transferencia y comparar la gráfica obtenida por el osciloscopio con el software Matlab, y dar una interpretación clara de lo que sucedió.
Material.Para la realización de la práctica se necesitaron de los siguientes materiales.
Sistema de 3 engranes de plástico Motor de corriente directa a 12V Potenciómetro de alambre de 5kΩ Madera (para el soporte del mecanismo) Amplificadores operacionales TL084CN Trimpots de varios valores Resistencia de varios valores Diodos zener de 5.1V Diodos 1N4148 Integrado 74LS14 Integrado TL494 Puente H L298N (circuito armado) Protoboards Alambre para protoboard Push-button Capacitor de poliéster Fuente de alimentación digital Multímetro digital Osciloscopio Puntas de osciloscopio Puntas mixtas
Desarrollo.El mecanismo de la planta que utilizamos lo armamos con un tren de engranaje al cual iban: un engrane pequeño perteneciente al motor en un extremo, al centro un engrane con el tamaño más grande el cuál iría a un eje, y por último, al otro extremo un tercer engrane menor perteneciente al potenciómetro de alambre.
Página | 1

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
Una vez armado el mecanismo se prosiguió a armar el circuito, que fue el propuesto en clase, sin embargo, nosotros agregamos algunos seguidores en las salidas que controlaban el giro del motor para que funcionara bien pues nos daba problemas al probar sistema completo.
El puente H utilizado en la práctica fue realizado “manualmente” dentro del protoboard del circuito, sin embargo, tuvimos pequeños problemas y optamos por sustituirlo por un puente H armado en una placa, el cual nos funcionó perfectamente.
El diente de sierra fue previamente calculado para que la frecuencia obtenida fuese de aproximadamente 1kHz, sin embargo el voltaje que teníamos que obtener debía ser el mismo que el error, pero nos salía más que éste por lo que se redujo con un dos inversores en un amplificador operacional.
Al potenciómetro lo conectamos a 12V y la señal de salida se conectó a la entrada del sensor del diferencial ya indicado. Nuestro Set-Point era de 5V que era nuestra posición inicial, esto lo hicimos con fines de protección.
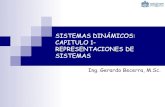
Fotografías.Primer circuito propuesto.
Página | 2

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
Circuito.
Página | 3

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
Página | 4

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
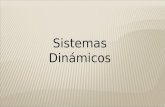
La gráfica en el osciloscopio, hay dos porque estábamos probando dónde podíamos grabar la información obtenida.
La imagen obtenida del osciloscopio es la siguiente.
Página | 5

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
La gráfica que se encuentra arriba es la entrada de la planta, un pulso escalón, y la gráfica que se encuentra debajo es la respuesta real de la planta. Se aprecia que la respuesta real varía mucho con respecto al escalón que es la respuesta que en realidad se espera. La diferencia entre las dos gráficas es conocida como el error, en nuestro caso el error es de 2.18V .
Físicamente, en el mecanismo, el engrane da aproximadamente media vuelto con respecto a la posición inicial, lo ideal sería que diese la vuelta completa, que se traduciría como que sistema responde como se espera, sin error.
Obtención de la función de transferencia del sistema en MatLabUna vez que se han exportado los datos de la respuesta del sistema del osciloscopio, se debe crear en MatLab 2 vectores columna que contengan esos mismos datos, cuidando que el tamaño sea el mismo. Después se utiliza la herramienta “System identification” de MatLab con el comando ident.
Aparece una ventana y en la primera pestaña de Import Data daremos clic en Time Domain.
A continuación se despliega otra ventana en la que debemos poner el nombre del vector que contiene los datos de entrada y salida correspondientes. También en el Starting time poner 0 y en el Sampling interval poner el valor de la frecuencia en que se tomaron los datos, esto aparece al principio del archivo de Excel. Dar clic en import.
Página | 6

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
En seguida daremos clic en Estimate y Process Model.
En la siguiente ventana seleccionamos un modelo que contenga 3 polos y desactivamos la casilla de Delay. Damos clic en Estimate.
Página | 7

INSTITUTO TECNOLÓGICO DE MÉXICOINSTITUTO TECNOLÓGICO DE QUERÉTARO
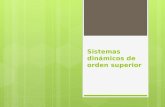
Con esto se obtiene la siguiente función de transferencia:
Podemos comparar la repuesta del sistema real (color negro) obtenido con la respuesta del modelo encontrado por MatLab (color azul).
Conclusiones.Con ésta práctica nos queda más claro cómo son las respuestas reales de las plantas con sistemas mecánicos en los que no tenemos un control preciso. Se demostró que la planta no responde como idealmente se propone, que influyen los componentes electrónicos y el diseño mecánico en el correcto funcionamiento de la misma.
Lo que nos costó más en la realización de ésta práctica fue la identificación e interpretación de los problemas que durante el desarrollo se nos presentaron.
Con forme el semestre avance y nuestros conocimientos crezcan seremos capaces de hacer que ésta planta funcione como idealmente se propuso.
Página | 8