02. 1a trobada joves inquiets i emprenedors de terrassa slide share
Upload
alex-atao-enriquezCategory
view
216download
3description

Cinemática del Robot
Denavit-Hartenbergg
Ricardo Rodríguez [email protected]@uni.edu.pe
M.Sc R. Rodríguez Bustinza1

Para describir la relación que existe entre dos elementoscontiguos se puede hacer uso de cualquier sistema dereferencia ligado a cada elemento, la forma habitual que sesuele utilizar en robótica es la representación de DenavitDenavit--suele utilizar en robótica es la representación de DenavitDenavit--HartenbergHartenberg (D(D--H)H).
Según la representación DD--HH escogiendo adecuadamente losSegún la representación DD--HH, escogiendo adecuadamente lossistemas de coordenadas asociados a cada eslabón, seráposible pasar de uno al siguiente mediante 4 transformacionesbásicas que dependen exclusivamente de las característicasgeométricas del eslabón.
1. Rotación alrededor del eje zi-1 un ángulo θi
2. Traslación a lo largo de zi-1 una distancia d; vector di(0,0,di)
3 Traslación a lo largo de x una distancia a ; vector a (a 0 0)3. Traslación a lo largo de xi una distancia ai; vector ai(ai,0,0)
4. Rotación alrededor del eje xi un ángulo αi
2 M.Sc R. Rodríguez Bustinza

Dado que el producto de matrices no es conmutativo, lasq p ,transformaciones se han de realizar en el orden indicado.
)()00()00()(1i TTdTTA θ ),()0,0,(),0,0(),(1iiiii
i xTaTdTzTA αθ=−
Realizando el producto entre las matrices (θ a d α son losRealizando el producto entre las matrices. (θi, ai, di, αi son losparámetros DD--HH del eslabon i).
⎤⎡⎤⎡⎤⎡⎤⎡ 0001001000100SC θθ
⎥⎥⎥⎤
⎢⎢⎢⎡
−⎥⎥⎥⎤
⎢⎢⎢⎡
⎥⎥⎥⎤
⎢⎢⎢⎡
⎥⎥⎥⎤
⎢⎢⎢⎡ −
=− 000001
0010001
00100001
0000
1 ii
i
ii
ii
ii SC
aCSSC
Aααθθ
θθ
⎥⎥
⎦⎢⎢
⎣⎥⎥
⎦⎢⎢
⎣⎥⎥
⎦⎢⎢
⎣⎥⎥
⎦⎢⎢
⎣ 100000
10000100
1000100
10000100 iii
i CSdA
αα
⎥⎥⎤
⎢⎢⎡
−−
−1 iiiiiii
iiiiiii
i SaCSCCSCaSSSCC
Aθθαθαθθθαθαθ
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
10000 iii
i dCSA
αα
3
⎦⎣
M.Sc R. Rodríguez Bustinza

Algortimo de Denavit-HartenbergAlgortimo de Denavit Hartenberg
D-H1. Numerar los eslabones comenzando con 1 (primer eslabón(pmóvil de la cadena) y acabando con n (último eslabónmóvil). Se numerará como eslabón 0 a la base fija del
b trobot.
D-H2. Numerar cada articulación comenzando por 1 (qued l i DOF) bcorresponde al primer DOF) y acaba en n.
D-H3. Localizar el eje de cada articulación. Si ésta es rotativa, elj á i j d i Si i áti á l jeje será su propio eje de giro. Si es prismática, será el eje a
lo largo del cual se produce el desplazamiento.
D H4 P i d 0 1 it l j b l j d lD-H4. Para i de 0 a n-1, situar el eje zi sobre el eje de laarticulación i+1.
D H5 Sit l i d l i t d l b {S } l iD-H5. Situar el origen del sistema de la base {S0} en cualquierpunto del eje z0. Los ejes x0 e y0 se situarán de modo queformen un sistema dextrógiro con z0.
4
g 0
M.Sc R. Rodríguez Bustinza

D-H6 Para i de 1 a n-1 situar el sistema {S } (solidario al eslabónD-H6. Para i de 1 a n-1, situar el sistema {Si} (solidario al eslabóni) en la intersección del eje zi con la línea normal común a zi-
1 y zi. Si ambos ejes se cortasen se situaria {Si} en el puntode corte. Si fuesen paralelos {Si} se situaría en laarticulación i+1.
D-H7. Situar xi en la línea normal común a zi-1 y zi.
D-H8. Situar yi de modo que forme un sistema dextrógiro con xi yzi.
D-H9. Situar el sistema {Sn} en el extremo del robot, para zncoincida con la dirección de zn-1 y xn sea normal a zn-1 y zn.
D-H10. Obtener θi como el ángulo que hay que girar entorno azi-1 para que xi-1 y xi queden paralelos.
D-H11. Obtener di como la distancia medida lo largo de zi-1, que,habría que desplazar {Si-1} para que xi-1 y xi quedenalineados.
5 M.Sc R. Rodríguez Bustinza

D-H12. Obtener ai como la distancia medida a lo largo de xi (quei g i (qahora coincidira xi-1) que habría que desplazar elnuevo {Si-1} para que su origen coincida con {Si}.
D-H13. Obtener αi como el ángulo que hay que girar entorno a xipara que el nuevo {Si-1} coincida totalmente con {Si}.
D-H14. Obtener las matrices de transformación i-1Ai
D-H15. Obtener las matrices de transformación que relaciona elqsistema de la base con el extremo del robot :
T=0A1,1A2 .. n-1An.1, 2 n
D-H16. La matriz T define la orientación (submatriz de rotación) yposición (submatriz de traslación) del extremo referido a lap ( )base en función de las n coordenadas articulares.
Los 4 parámetros de DD--HH (θθii,, ddii,, aaii,, ααii) dependen únicamentep ( ii,, ii,, ii,, ii) pde las características geométricas de cada eslabón y delas articulaciones que le unen con el anterior y siguiente.
6 M.Sc R. Rodríguez Bustinza

7 M.Sc R. Rodríguez Bustinza

θθii Es el ángulo que forman los ejes xi-1 y xi medido en un planoperpendicular al eje z usando la regla de la mano derecha Seperpendicular al eje zi-1, usando la regla de la mano derecha. Setrata de un parámetro variable en articulaciones giratorias.
dd Es la distancia a lo largo del eje z desde el origen del sistema deddii Es la distancia a lo largo del eje zi-1 desde el origen del sistema decoordenadas (i-1)-ésimo hasta la intersección del eje zi-1 con el ejexi. Se trata de un parámetro variable en articulaciones prismáticas.
aaii Es la distancia a lo largo del eje xi que va desde la intereseccióndel eje zi-1 con el eje xi hasta el origen del sistema i-ésimo, en elcaso de articulaciones giratorias. En el caso de articulacionesprismáticas, se calcula como la distancia más corta entre los ejesz y zzi-1 y zi.
ααii Es el ángulo de separación del eje zi-1 y el eje zi, medido en unplano perpendicular al eje x utilizando la regla de la manoplano perpendicular al eje xi, utilizando la regla de la manoderecha.
8 M.Sc R. Rodríguez Bustinza

Una vez obtenidos los parámetros D-H, el cálculo de lasrelaciones entre los eslabones consecutivos del robot esinmediato ya que vienen dadas por las matrices A que seinmediato, ya que vienen dadas por las matrices A, que secalculan según la expresion general dado por i-1Ai.
Las relaciones entre eslabones no consecutivos vienen dadasLas relaciones entre eslabones no consecutivos vienen dadaspor las matrices T que se obtiene como el producto de unconjunto de matrices de A.
Obtenida la matriz T, esta expresará la orientación (submatriz3x3 de rotación) y posicion (submatriz de 3x1 de traslación) delextremo del robot en función de las coordenadas articulares,con lo que quedará resuelto el problema Cinemático Directo.
9 M.Sc R. Rodríguez Bustinza

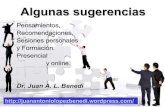
EjemploEjemplo:: Solución a un problema cinemático directo para unrobot cilíndrico. En principio vamos a localizar los sistemas dereferencia para cada una de las articulaciones del robot (Fig 1)referencia para cada una de las articulaciones del robot (Fig. 1).Posteriormente determinaremos el DD--HH del robot, con lo que secostruye una tabla. Una vez calculados los parámetros de cadaeslabón, se calcula la matriz A sustituyendo en la expresiongeneral i-1Ai.
Articulación θ d a α
1 θ1 l1 0 0°2 90° d2 0 90°3 0 d3 0 0°3 0 d3 0 04 θ4 l4 0 0°
10 M.Sc R. Rodríguez Bustinza

Fig. 1.
11 M.Sc R. Rodríguez Bustinza

⎥⎥⎤
⎢⎢⎡ −
⎥⎥⎤
⎢⎢⎡
⎥⎥⎤
⎢⎢⎡
⎥⎥⎤
⎢⎢⎡ −
0001
00100001
00010100
0000 4411
CSSC
CSSC
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
1000010
00;
1000100
0010;
1000010
0001;
1000100
00
4
444
3
33
2
22
1
1
111
0
lCS
Ad
Ad
Al
CSA
⎦⎣⎦⎣⎦⎣⎦⎣
Luego calculamos la matriz T que indicará la localización final cong qrespecto al sistema de referencia de la base del robot.
⎥⎤
⎢⎡
++−
)()( 43114141
ldSSSCCCldCCSSCS
⎥⎥⎥⎥
⎢⎢⎢⎢
++−
==0
)(
1244
431141414
33
22
11
0
ldCSldSSSCCC
AAAAT
⎥⎦
⎢⎣ 1000
12 M.Sc R. Rodríguez Bustinza

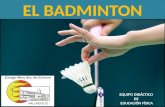
EjemploEjemplo:: Solución a un problema cinemático directo para unj pj p p probot IRB6400C. En principio, siguiendo con el algoritmo DD--H,H,se va a localizar los sistemas de referencia para cada una del ti l i d l b t (Fi 2)las articulaciones del robot (Fig. 2).
Articulación θ d a α1 θ 0 0 90°1 θ1 0 0 -90°2 θ2 l1 0 90°3 θ3-90° 0 l2 90°4 θ l 0 90°4 θ4 l3 0 - 90°5 θ5 0 0 90°5
6 θ6 l4 0 0°
13 M.Sc R. Rodríguez Bustinza

Fig. 2.
14 M.Sc R. Rodríguez Bustinza

⎥⎤
⎢⎡ −−
⎥⎤
⎢⎡
⎥⎤
⎢⎡ 00000 32332211 SlCSSCSC
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
−−=
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
−=
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
−=
10000010
0;
1000010
00;
1000001000 3233
32
1
222
1111
0 ClSCA
lCS
ACS
A
⎥⎥⎤
⎢⎢⎡ −
⎥⎥⎤
⎢⎢⎡
−⎥⎥⎤
⎢⎢⎡ −
⎥⎦
⎢⎣
⎥⎦
⎢⎣
⎥⎦
⎢⎣
0000
0000
0000
100010001000
665544
CSSC
CSSC
CSSC
⎥⎥⎥
⎦⎢⎢⎢
⎣
=
⎥⎥⎥
⎦⎢⎢⎢
⎣
−=
⎥⎥⎥
⎦⎢⎢⎢
⎣
−=
1000100
00;
1000001000
;
1000010
00
4
666
5555
4
3
444
3
lCS
ACS
Al
CSA
⎦⎣⎦⎣⎦⎣
Luego calculamos la matriz T que indicará la localización final conrespecto al sistema de referencia de la base del robotrespecto al sistema de referencia de la base del robot.
⎤⎡ paon
⎥⎥⎥⎤
⎢⎢⎢⎡
== 65
54
43
32
21
10 yyyy
xxxx
paonpaon
AAAAAAT
⎥⎥
⎦⎢⎢
⎣ 1000
654321zzzz paon
15
⎦⎣M.Sc R. Rodríguez Bustinza