TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC · 2016-08-08 · matemáticos que definen a cada...
99
TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA APUNTES DE SISTEMAS LINEALES ASIGNATURA: SISTEMAS LINEALES REALIZO: MARIA TERESA GONZÁLEZ BAÑALES
Transcript of TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC · 2016-08-08 · matemáticos que definen a cada...

TECNOLÓGICO DE ESTUDIOS SUPERIORES DE ECATEPEC
DIVISIÓN DE INGENIERÍA ELECTRÓNICA Y TELEMÁTICA
APUNTES DE SISTEMAS LINEALES
ASIGNATURA: SISTEMAS LINEALES
REALIZO:
MARIA TERESA GONZÁLEZ BAÑALES
ÍNDICE
UNIDAD I “INTRODUCCIÓN” 1.1 CONCEPTOS BÁSICOS ------------------------------------------------------------------ 1
UNIDAD II “ANALOGÍAS”
2.1 MODELOS MATEMÁTICOS-------------------------------------------------------------- 3
UNIDAD III”FUNCIÓN DE TRANSFERENCIA” 3.1 MÉTODO POR LEYES DE KIRCHOFF Y LEYES DE NEWTON ------- 12
3.2 ÁLGEBRA DE BLOQUE ---------------------------------------------------------------- 16
3.3 DIAGRAMAS DE FLUJO DE SEÑAL ----------------------------------------------- 28
UNIDAD IV “ANÁLISIS DE SISTEMAS DE PRIMER ORDEN”
4.1 ANÁLISIS DE LA RESPUESTA TRANSITORIA --------------------------------- 35
4.2 FUNCIONES DE ENTRADA ---------------------------------------------------------- 36
4.3 ANÁLISIS DE SISTEMAS DE PRIMER ORDEN -------------------------------- 37
UNIDAD V “ANÁLISIS DE SISTEMAS DE SEGUNDO ORDEN” 5.1 SISTEMAS DE SEGUNDO ORDEN -------------------------------------------------- 39 5.2 ESPECIFICACIONES DE LA RESPUESTA TRANSITORIA DE LOS SISTEMAS DE SEGUNDO ORDEN ------------------------------------------------------- 43
UNIDAD VI “ESTABILIDAD ABSOLUTA”
6.1 POLOS Y CEROS------------------------------------------------------------------------- 48
6.2 ESTABILIDAD ----------------------------------------------------------------------------- 49
6.3 CRITERIO DE ROUTH-HURWITZ ------------------------------------------------- 50
UNIDAD VII “LUGAR GEOMÉTRICO DE LAS RAÍCES” 7.1 Lugar geométrico de las raíces ---------------------------------------------------- 56

UNIDAD VIII “CONTROLADORES”
8.1 INTRODUCCIÓN -------------------------------------------------------------------------- 74
8.2 CONTROL PROPORCIONAL (P). ---------------------------------------------------- 75
8.3 CONTROL INTEGRAL (I). ------------------------------------------------------------ 78
8.4 CONTROL PROPORCIONAL-INTEGRAL (PI). ------------------------------------- 81
8.5 CONTROL PROPORCIONAL-DERIVATIVO (PD). ------------------------------ 82
8.7 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO (PID). -------------- 84
UNIDAD IX “ERRORES”
9.1 TIPO EN LOS SISTEMAS DE CONTROL. -------------------------------------- --- 87
9.2 ERRORES EN ESTADO ESTACIONARIO. ------------------------------------- --- 89
1
UNIDAD I “INTRODUCCIÓN”
1.1 CONCEPTOS BÁSICOS
Sistema
Conjunto de elementos interrelacionados para alcanzar un fin común.
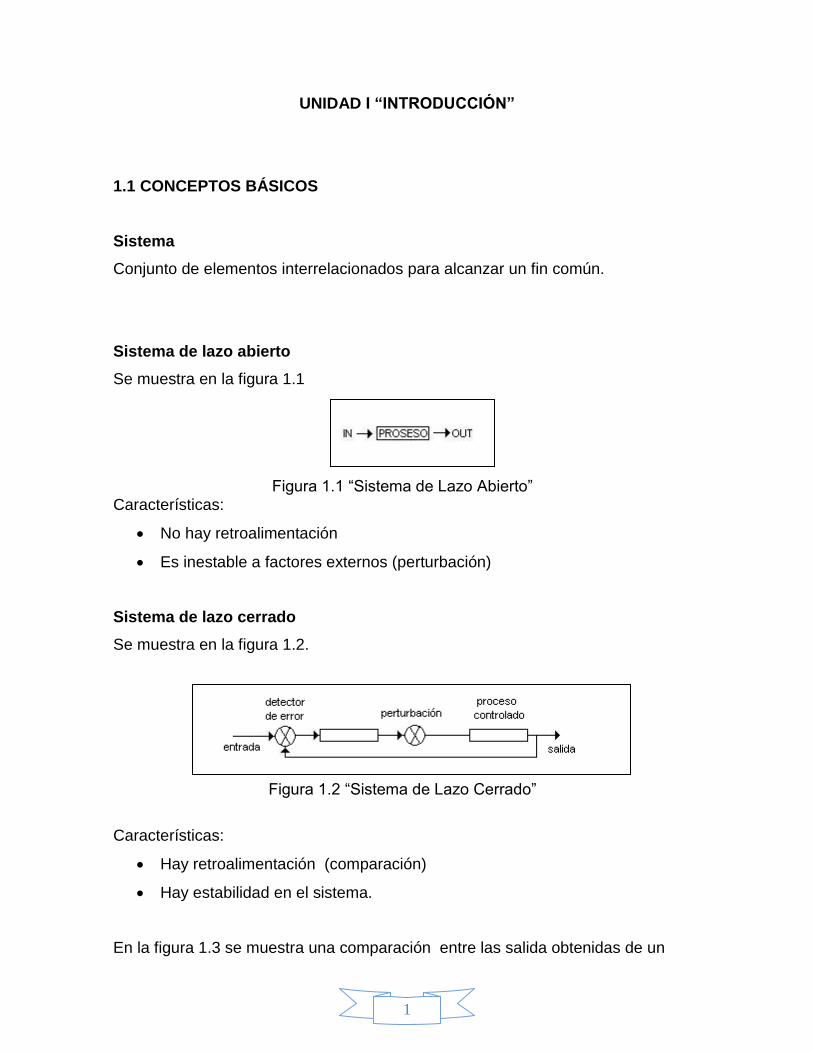
Sistema de lazo abierto
Se muestra en la figura 1.1
Figura 1.1 “Sistema de Lazo Abierto”
Características:
No hay retroalimentación
Es inestable a factores externos (perturbación)
Sistema de lazo cerrado
Se muestra en la figura 1.2.
Figura 1.2 “Sistema de Lazo Cerrado”
Características:
Hay retroalimentación (comparación)
Hay estabilidad en el sistema.
En la figura 1.3 se muestra una comparación entre las salida obtenidas de un

2
sistema de lazo abierto y uno de lazo cerrado si se tuviese una perturbación.
Lazo abierto Lazo cerrado Figura 1.3 “Salidas de un sistema de lazo abierto y de lazo cerrado”
Sistema Lineal
Los sistemas son lineales en un determinado momento, como se representa en
el esquema 1.4.
Resistencia Diodo
Figura 1.4 “Representación de la linealidad en dos elementos”
UNIDAD II “ANALOGÍAS”
Para concluir con un cuadro de analogías existentes entre los diferentes
elementos de sistemas eléctricos y mecánicos es necesario plantear los modelos
matemáticos que definen a cada elemento de los diferentes tipos de sistemas, lo
cual se planteará en este apartado.

3
2.1 MODELOS MATEMÁTICOS - Componentes Eléctricos Resistencia
VR (t) = R i (t) = R d q (t) dt Bobina
VL (t) = L d i (t) = L d2 q (t) dt dt2 Capacitor
VC (t) = 1 i (t) dt = 1 q (t) C C
-Componentes Mecánicos (traslación rotación ) Recordando algunos conceptos básicos de física se tiene que: v (t) = d y (t) a (t) = d v (t) dt dt TRASLACIÓN
Masa fm (t) = m a (t) = m dv (t) = m d2 y (t) dt dt2
Resorte fK (t) = k v (t) dt = K y (t) = K a (t) dt

4
Fricción fB (t) = B v (t) = B d y (t)= B a (t) dt dt ROTACIONAL Masa Inercial
TJ (t) = J (t) = J d (t) = m d2 (t) dt dt2 Resorte de torsión
TK (t) = k (t) dt = K (t) = K (t) dt Fricción
TB (t) = f (t) = f d (t)= f (t) dt dt Ejemplos: Encontrar el modelo matemático que define a cada sistema. 1)
V (t) = VR + VL + VC = RL + L d i (t) + 1 i (t) dt dt C 2)
f (t) = f m + f k + f B = = m dv (t) = k v (t) dt = B v (t) dt

5
3)
T (t) = T J + T K + Tf = J d (t) = k (t) dt = f (t) dt Tomando en cuenta los ejemplos anteriores se concluye con una tabla (tabla 2.1) de analogías, de elementos eléctricos y mecánicos.
E (serie) Tr R
R B f
C K K
B m J
Voltaje f (t) T (t)
corriente V (t) (t)
Tabla 2.1 “Analogías de elementos eléctricos y mecánicos” EJEMPLO: Encontrar el sistema análogo mecánico de traslación del siguiente sistema eléctrico.
Malla1
V (t) = R1 i1(t) + R2 (i1 - i2) + 1 (i1 - i2) dt + L1 d i1 (t) C1 dt Malla2
0 = R1 i2(t) + R2 (i2 - i1) + 1 i2 dt + L2 d i2 (t) + 1 (i2 - i1) dt C2 dt C1

6
RESULTADO GRÁFICO
f (t) = B1 V1 (t) + B2 (V1 - V2) + K1 (V1 - V2 ) dt + M1 d V1 (t) dt
0 = B1 V2 (t) + B2 (V2 - V1) + K2 V2 dt + M2 d V2 (t) + K1 (V2 - V1) dt dt Resolver los siguientes ejercicios: Ejercicio 1
f (t) = f3 V1 + B1 (V1 - V2) + K1 (V1 - V2 ) dt + M1 d V1 (t) dt
0 = f1 V2 + B1 (V2 - V1) + K2 V2 dt + M2 d V2 (t) + K1 (V2 - V1) dt dt Sistema Análogo

7
Ejercicio 2
(t) = f2 1 + + K1 (1 - 2 ) dt + J1 d 1 (t) + K2 1 dt dt
0 = f1 2 + J2 d 2 (t) + K1 (2 - 1 ) dt dt
Sistema Análogo.
Ejercicio 3
f (t) = B2 V1 + B1 (V1 - V2) + K2 (V1 - V2 ) dt + M1 d V1 (t) dt
0 = B1 (V2 - V1) + K3 V2 dt + M2 d V2 (t) + K2 (V2 - V1) dt dt

8
Sistema Análogo.
Ejercicio 4
(t) = f1 1 + + K1 (1 - 2 ) dt + J1 d 1 (t) + B1 1 dt
0 = J2 d 2 (t) + K1 (2 - 1 ) dt + B2 (3 - 2 ) + K2 (2 - 3 ) dt dt
0 = J3 d 3 (t) + K2 (3 - 2 ) dt + B2 (3 - 2 ) + f2 3 (t) dt Sistema Análogo.

9
Ejercicio 5
f (t) = K2 (V1 - V2 ) dt + M1 d V1 (t) + K1 (V1 - V2 ) dt dt
0 = B1 (V2 - V3) + M2 d V2 (t) + K2 (V2 - V1) dt + K1 (V2 - V1) dt dt
0 = B1 (V3- V2 ) + M3 d V3(t) + B2 V3 (t) + K3 V3 dt dt Sistema Análogo.

10
Ejercicio 6
0 = K1 (V1 - V2 ) dt + M1 d V1 (t) + B1 (V1 - V2 ) dt + f1 V1 (t) dt
f (t) = B1 (V2 - V1) + M2 d V2 (t) + K3 (V2 - V3) dt + K1 (V2 - V1) dt + f2V2(t) +
K2 (V2 - V3)dt dt
0 = f3V3 + M3 d V3(t) + B2 V3 (t) + K2 (V3- V2 ) dt + K3 (V3- V2 ) dt + K4 (V3- V2 ) dt
dt
Sistema Análogo.
Masa Puntual Ejercicio 1

11
K1 [ X1 (t) - X2 (t) ] = B1d X2(t) fk1 = fB1 dt f (t) = K2 X1 (t) + K1 [ X1 (t) - X2 (t) ] + M1 d
2 X1 (t) dt Sistema Análogo.
Ejercicio 2
f (t) = fk1 + fB1 f (t) = k1 [ X1 (t) - X2 (t) ] + B1 [ d X1 (t) - d X2 (t)] dt dt fB2 = fk1 + fB1 k1 [ X1 (t) - X2 (t) ] + B1 [ d X1 (t) - d X2 (t)] = B2 [ d X2(t) - d X3 (t)] dt dt dt dt B2 [ d X2(t) - d X3 (t)] = k2 X3 dt dt Sistema Análogo

12
UNIDAD III ”FUNCIÓN DE TRANSFERENCIA”
La función de transferencia ayuda al análisis de una salida con respeto a un tipo
de entrada y definida de una manera sencilla se expresaría como:
FT = salida . entrada
Existen varios métodos para encontrar la función de transferencia de un sistema
determinado, aquí se verán tres uno es utilizando las leyes de Kirchoff y las
leyes de Newton, el segundo es por álgebra de bloques y el tercero es por
diagramas de flujo de señal.
3.1 MÉTODO POR LEYES DE KIRCHOFF Y LEYES DE NEWTON
Para entender este método será más sencillo hacerlo con base a ejemplos y
posteriormente con ejercicios.
Ejemplos:
Encontrar la Función de transferencia, a) I (s)/ Ve(s), b) VL (s) / Ve (s), del
siguiente sistema.
a) Ve (t) = R1 i (t) + R2 i (t) + L d i (t)

13
dt Ve (s) = R1 I (s) + R2 I (s) + L S I(s)
Ve (s) = Is [ R1 + R2 + L S ]
I (s) = 1 .
Ve(s) R1 + R2 + L S b) Ve (s) = Is [ R1 + R2 + L S ]
VL(t) = L d i(t) dt
VL(t) = L S I(s)
I (s) = VL(s) LS
Ve (s) = VL(s) [ R1 + R2 + L S ] LS VL (s) = LS . Ve (s) R1 + R2 + L S Encontrar la función de transferencia Y1(s)/F(s) y una vez obtenido el
equivalente eléctrico la relación del voltaje del capacitor con respecto el voltaje
de entrada.
f (t) = d2 y1 (t) + B d y1 (t) + K y1 (t) dt2 dt F(s) = M s2 Y1 (s) + K Y1 (s) + B s Y1 (s) Y1 (s) = 1 . F (s) M S2 + K + B S

14
SISTEMA ELÉCTRICO ANÁLOGO
Ve (t) = L d i (t) + 1 i (t) dt + R i(t) dt C Ve (s) = L S I (s) + 1 I (s) + R I (s) CS Ve (s) = I (s) [L S + 1 + R ] CS Ve (s) = I (s) [L S2 C + 1 + R S C ] CS
Vc (s) = 1 I (s) I (s) = Vc (s) C S y sustituyo en la anterior CS Ve (s) = (Vc (s) C S ) [L S2 C + 1 + R S C ] CS Vc (s) = 1 . Ve (s) L S2 C + 1 + R S C Ejercicio Encontrar : I1 (s) , I2 (s) , Vc (s) V(s) V(s) V(s)
a)

15
V (t) = L1 d i 1(t) + R2 i1 (t) + R1 [ i1 (t) - i2 (t)] dt V (s) = L1 S I1 (s) + R2 I1 (s) + R1 [ I1 (s) - I2 (s)] V (s) = L1 S I1 (s) + R2 I1 (s) + R1 I1 (s) - R1 I2 (s) V (s) = I1 (s) [L1 S + R2 + R1 ] - R1 I2 (s) Ecuación 1
0 = L2 d i2 (t) + 1 i2 (t) dt + R3 i2 (t) dt + R1 [ i2 (t) - i1 (t)] dt C 0 = I2 (s) [L2 S + 1 + R3 + R1 ] - R1 I1 (s) Ecuación 2 CS De la ecuación 2 despejamos I2 (s) sustituimos en la ecuación 1 I2 (s) = C S R1 I1 (s) . L2 C S2 + 1 + C S R3 + C S R1 Sustituimos en la ecuación 1 V (s) = I1 (s) [L1 S + R2 + R1 ] - R1 [ C S R1 I1 (s) ] L2 C S2 + 1 + C S R3 + C S R1 V (s) = I1 (s) [L1 S + R2 + R1 ] - C S R1
2 I1 (s) . L2 C S2 + 1 + C S R3 + C S R1 V (s) = I1 (s) [L1 S + R2 + R1 - C S R1
2 . L2 C S2 + 1 + C S R3 + C S R1 I1 (s) = L2 C S2 + 1 + C S R3 + C S R1 . V (s) (L1 S + R2 + R1 ) (L2 C S2 + 1 + C S R3 + C S R1 ) - C S R1
2 b) Despejamos I1 (s) I1 (s) = I2 (s) [ L2 C S2 + 1 + C S R3 + C S R1 ] C S R1 V (s) = I2 (s) [ L2 C S2 + 1 + C S R3 + C S R1 ] [L1 S + R2 + R1 ] - R1 I2 (s) C S R1 V (s) = I2 (s) [ (L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - R1 ] C S R1 V (s) = I2 (s) [ (L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - C S R1
2 ] C S R1 I2 (s) = C S R1 . V (s) (L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - C S R1
2

16
c) Vc (s) = 1 I2 (s) CS I1 (s) = I2 (s) [ L2 C S2 + 1 + C S R3 + C S R1 ] C S R1
V (s) = I2 (s) [ L2 C S2 + 1 + C S R3 + C S R1 ] (L1 S + R2 + R1 ) - R1 I2 (s) C S R1
V (s) = I2 (s) [ ( L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - R1 ] C S R1
V (s) = Vc (s) C S [ ( L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - C S R1
2 ] C S R1
Vc (s) = R1 . V (s) ( L2 C S2 + 1 + C S R3 + C S R1 ) (L1 S + R2 + R1 ) - C S R1
2 3.2 ÁLGEBRA DE BLOQUE Para este método es necesario definir algunos esquemas utilizados en el
proceso. En la figura 3.1 se muestran los elementos básicos para entender el
álgebra de bloques.
Bloque Punto de Toma Punto de Suma
Figura 3.1 “Símbolos básicos para el álgebra de bloques” Al igual que en el método anterior para su entendimiento se analizará el procedimiento para la resolución de algunos ejemplos.

17
Ejemplos: Hallar la función de transferencia indicada en el cada uno de los sistemas. A)
G (s) = G1 + G2
G (s) = G3 + G4
C (s) = G1 + G2 . R (s) 1 + (G1 + G2) (G3 + G4) B)
1. - G3 . 1 + G3 H3

18
2.- G2 G3 . 1 + G3 H3
G2 G3 . 3.- 1 + G3 H3 . = G2 G3 . 1 + H2 G2 G3 . 1 + G2 H3 + G3G2H2 1 + G3 H3 4.- = G1 G2 G3 . 1 + G2 H3 + G3G2H2 5.- H4 H5 G1 G2 G3 . 6.- 1 + G2 H3 + G3G2H3 . = G1 G2 G3 . 1 + G1 G2 G3 H4 H5 . 1 + G2 H3 + G3G2H2 + G1 G2 G3 H4 H5 1 + G3 H3 + G3G2H2 7.- G1 G2 G3 + G4 1 + G2 H3 + G3G2H2 + G1 G2 G3 H4 H5 F. T. = G1 G2 G3 + G1 G2 G3 G4 H4 H5 + G2 G3 G4 H2 + G3 G4 H3+ G4 . 1 + G2 H3 + G3G2H2 + G1 G2 G3 H4 H5 C)

19
1.- H1 + G2
2.- (H3 + G2)G3 3. - 1 . 1 + G2 H2 4.- (H1 + G2) G3 1 + G2 H2 (H1 + G2) G3 5.- 1 + G2 H2 = H1 G3 + G2 G3 . 1 + (H1 + G2) H3 G3 1 + H2 G2 + H1 G3 H3 + G2 G3 H3 1 + G2 H2 6.- H1 G3 G1 + G1 G2 G3 . 1 + H2 G2 + H1 G3 H3 + G2 G3 H3 H1 G3 G1 + G1 G2 G3 . 7.- 1 + H2 G2 + H1 G3 H3 + G2 G3 H3 . 1 + H1 G3 G1 + G1 G2 . 1 + H2 G2 + H1 G3 H3 + G2 G3 H3 F. T. = H1 G3 G1 + G1 G2 G3 . 1 + H2 G2 + H1 G3 H3 + G2 G3 H3 + H1 G3 G1 + G1 G2 G3 D)
1.- H1 G2 2.- G2 G3

20
3.- (G2 G3) + G4 4.- H2 (G2 G3 + G4) 5.- 1 . 1 + H2 (G2 G3 + G4) 6.- G1 . 1 + H2 (G2 G3 + G4) G1 . 7.- 1 + H2 (G2 G3 + G4) = G1 . 1 + G1 H1 G2 . 1 + H2 (G2 G3 + G4) + H1 G2 G1 1+ H2 (G2 G3 + G4) 8.- G1 (G2 G3 + G4) . 1 + H2 (G2 G3 + G4) + H1 G2 G1 G1 (G2 G3 + G4) . 9.- 1 + H2 (G2 G3 + G4) + H1 G2 G1 . 1 + H2 (G2 G3 + G4) + H1 G2 G1 + G1 (G2 G3 + G4) 1 + H2 (G2 G3 + G4) + H1 G2 G1 9.- G1 (G2 G3 + G4) . 1 + H2 (G2 G3 + G4) + H1 G2 G1 + G1 (G2 G3 + G4) 10.- 1 + G1 H1G2 (G2 G3 + G4) = 1 + H2 (G2 G3 + G4) + G1 H1G2 (G2 G3 + G4) 1 + H2 (G2 G3 + G4) 1 + H2 (G2 G3 + G4) 11.- FT= 1 + H2 (G2 G3 + G4) + G1 H1G2 (G2 G3 + G4) 1 + H2 (G2 G3 + G4) E)

21
I1(s) = V (s) - V1 (s) V1 (s) = R2 [ I1 (s) - I2 (s)] R1 I2(s) = V1 (s) - V2 (s) V2 (s) = 1 I2 (s) = VC (s) LS CS
1.- CS 2.- 1 . LCS2 1 . 3.- LCS2 . LCS2 +1 LCS2 4.- LCS2 + 1 5.- R2 . LCS2 + 1 R2 . 6.- LCS2 + 1 = R2 . LCS2 + 1 + R2CS LCS2 + 1 + R2CS LCS2 + 1 7.- R2 . R1 (LCS2 + 1 + R2CS) R2 . 8.- R1 (LCS2 + 1 + R2CS) . R1 (LCS2 + 1 + R2CS) + R2 (LCS2 + 1) R1 (LCS2 + 1 + R2CS) F. T. : R2 . R1 (LCS2 + 1 + R2CS) + R2 (LCS2 + 1)
22
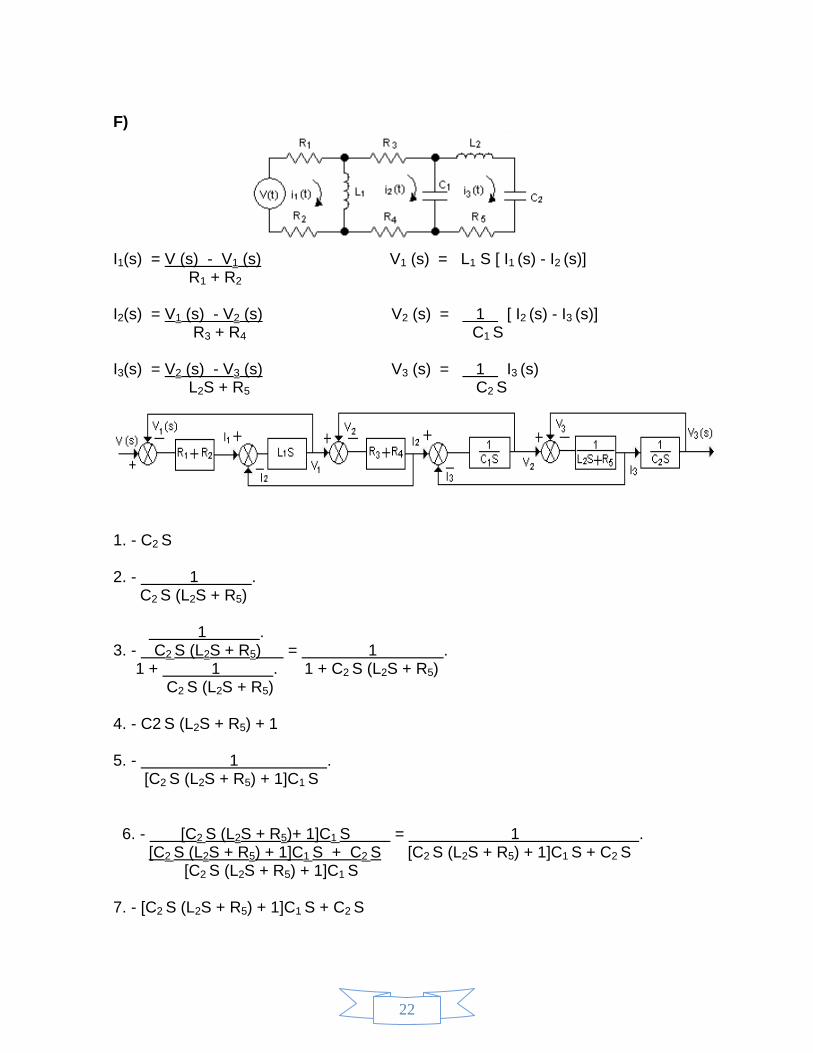
F)
I1(s) = V (s) - V1 (s) V1 (s) = L1 S [ I1 (s) - I2 (s)] R1 + R2 I2(s) = V1 (s) - V2 (s) V2 (s) = 1 [ I2 (s) - I3 (s)] R3 + R4 C1 S I3(s) = V2 (s) - V3 (s) V3 (s) = 1 I3 (s) L2S + R5 C2 S
1. - C2 S 2. - 1 . C2 S (L2S + R5) 1 . 3. - C2 S (L2S + R5) = 1 . 1 + 1 . 1 + C2 S (L2S + R5) C2 S (L2S + R5) 4. - C2 S (L2S + R5) + 1 5. - 1 . [C2 S (L2S + R5) + 1]C1 S 6. - [C2 S (L2S + R5)+ 1]C1 S = 1 . [C2 S (L2S + R5) + 1]C1 S + C2 S [C2 S (L2S + R5) + 1]C1 S + C2 S [C2 S (L2S + R5) + 1]C1 S 7. - [C2 S (L2S + R5) + 1]C1 S + C2 S

23
1 . 8.- 1 . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S 1 . 9.- (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S 9.- 1 . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 10.- (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 11.- L1 S . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 L1 S . 12.- (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1+ [C2 S (L2S + R5) + 1] + C2 S (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 12.- L1 S . (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1+ [C2 S (L2S + R5) + 1] + C2 S 13.- L1 S .. (R1 + R2)(R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S+ C2 S (L2S + R5) + 1+ C2 S (L2S + R5) + 1 + C2 S NOTA: A = (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1 B = (R3 + R4)[ C2 S (L2S + R5) + 1]C1 S + C2 S + C2 S (L2S + R5) + 1+ [C2 S (L2S + R5) + 1] + C2 S L1 S . 14.- (R1 + R2) B . (R1 + R2) B + (L1 S) A (R1 + R2) B F. T. : L1 S . (R1 + R2) B + (L1 S) A

24
G)
C1 = C3 = 1 F ; C2 = 0.1 F ; R1 = R4 = R5 = 4.7 K ; R2 = R6 = R3 = 1
K L1 = L3 = 10 mH ; L2 = 100 mH I1(s) = V (s) - V1 (s) V1 (s) = (L1 S + 1 ) [ I1 (s) - I2 (s)] R1 + R2 C1S I2(s) = V1 (s) - V2 (s) V2 (s) = (R4 + 1 ) [ I2 (s) - I3 (s)] L2S + R3 C2 S I3(s) = V2 (s) - V3 (s) V3 (s) = 1 I3 (s) R6 + R5 + L2S C3 S
1.- C3 S 2.- 1 . C2 S (L3S + R5 + R6) 1 . 3.- C2 S (L3S + R5 + R6) = 1 . 1 + 1 . 1 + C2 S (L3S + R5 + R6) C2 S (L3S + R5 + R6) 4.- 1 + C2 S (L3S + R5 + R6) 5.- C2 S R5 + 1 . [1 + C2 S (L3S + R5 + R6)]C2 S

25
C2 S R5 + 1 . 6.- [1 + C2 S (L3S + R5 + R6)]C2 S = C2 S R5 + 1 . [1 + C2 S (L3S + R5 + R6)]C2 S + (C3S) (C2 S R4+ 1) [1 + C2 S (L3S + R5+ R6)]C2 S + (C3S)(C2 SR4 + 1) [1 + C2 S (L3S + R5 + R6)]C2 S 7.- [1 + C2 S (L3S + R5 + R6)] (C2 SR4 + 1) . [1 + C2 S (L3S + R5+ R6)]C2 S + (C3S)(C2 SR4 + 1) NOTA: A = [1 + C2 S (L3S + R5+ R6)]C2 S + (C3S)(C2 SR4 + 1) B = 1 + C2 S (L3S + R5 + R6)] (C2 SR4 + 1) 1 . 8.- C2 S (L2S + R3) = A . 1+ B . A (L2S + R3) + B A (L2S + R3) C1 SL1S + 1 . 9.- C1 S = C1 SL1S + 1 = (C1 SL1S + 1) [A (L2S + R3) + B] . C1 S + A (C1 SL1S + 1) . C1 S + A (C1 SL1S + 1) [A (L2S + R3) + B] C1 S + A (C1 SL1S + 1) C1 S [A (L2S + R3) + B] C1 S A (L2S + R3) + B NOTA: D = (C1 SL1S + 1) [A (L2S + R3) + B] . [A (L2S + R3) + B] C1 S + A (C1 SL1S + 1) 10.- D . R1 + R2 D . 11.- R1 + R2 = D . R1 + R2 + C R1 + R2 + D R1 + R2 F. T. : [C2 S R5 + 1] A D . [1 + C2 S (L3S + R5+ R6)]C2 S + (C3S)(C2 SR4 + 1)A (L2S + R3) + BR1 + R2 + D

26
Ejercicios: Hallar la función de transferencia indicada. 1)
I1(s) = V (s) - V1 (s) V1 (s) = (R5 + 1 ) [ I1 (s) - I2 (s)] = (R5 C1S + 1 )[ I1 (s) - I2 (s)] L1S + R1 C1S C1S I2(s) = V1 (s) - V2 (s) V2 (s) = (L2S+ 1 ) [ I2 (s) - I3 (s)] = (C3 SL2S + 1)[ I2 (s) - I3 (s)] R2 + R3 C3 S C3 S I3(s) = V2 (s) - V3 (s) = SC4C2S[V2 (s) - V3 (s)] V3 (s) = [R4 + L3 S] I3(s) (1/C2S) + (1/ C4S) SC4 + SC2
Resuelva el diagrama a bloques. 2)

27
f (t) = M1 d
2 Y1 + (B1 + B2 + B3 ) (d Y1 - d Y2 ) dt dt 0 = M2 d
2 Y2 + (B1 + B2 + B3 ) (Y’2 - Y’1 ) + B4 (Y’2 - Y’3 ) + (K1 + K2 ) (Y’2 - Y’3 ) dt
2 0 = M3 d
2 Y2 + B5 Y’3 + (K3 + K4 ) Y5 + B4 (d Y’2 - d Y’3 ) + (K1 + K2 ) (Y’3 - Y’2 ) dt
2
I1(s) = V (s) - V1 (s) V1 (s) = (R1 + R2 + R3) [ I1 (s) - I2 (s)] L1S I2(s) = V1 (s) - V2 (s) V2 (s) = (R4 + 1 + 1 ) [ I2 (s) - I3 (s)] = C2 + C1 + C2 C1R4[ I2 (s) - I3 (s)] L2S C2 S C1 S C1C2 I3(s) = V2 (s) - V3 (s) = C3 [V2 (s) - V3 (s)] V3 (s) = 1 I3 (s) (1/C3) + R5 + L3S 1 + L3SC3S + C3R5 C4 S

28
Resuelva el diagrama a bloques.
3.3 DIAGRAMAS DE FLUJO DE SEÑAL Términos
a) Nodo de entrada: nodo que sólo tiene ramas de salida.
b) Nodo de Salida: nodo que sólo tiene ramas de entrada.
c) Trayectoria directa: es una trayectoria (sucesión continua de ramas) que
empieza en un nodo de entrada y termina en un nodo de salida a lo largo de la
cual ningún nodo se atraviesa más de una vez.
d) Mallas: es una trayectoria que se inicia y se termina en el mismo nodo y en
donde ningún otro nodo se encuentra más de una vez.
e) Mallas que no se tocan: dos partes de la gráfica de flujo de señal que no se
tocan

29
Fórmula de Ganancia n
M = MK K
k=1 M (Ganancia): Relación de salida con respecto a la entrada
N = número total de trayectoria
MK = ganancia de la trayectoria directa
K = cofactor
= determinante
= 1-( de lazos individuales) + ( de los lazos disjuntos de 2 en 2) - ( de los
lazos disjuntos de 3 en 3) + ...
Ejemplo: Obtener la función de transferencia de la siguiente gráfica
Y1a2
a32 a43a44
a45a23 a34
a24
a25
1.- Trayectoria directa
M1= a12a23a34a45
M2= a12a24a45
M3= a12a25
2.- Determinante
Δ= 1- ∑ Lazos individuales + ∑ Lazos disjuntos (2/2)
Lazos individuales
L1= a23a32
L2= a34a43
L3= a44
L4= a24a43a32
Lazos disjuntos (2/2)
L1L3 = a23a32a44

30
Lazos disjuntos (3/3)
No hay
Δ= 1- (a23a32 + a34a43 + a44 + a24a43a32) + a23a32a44
3.- Cofactores
ΔM1= 1-0=1
ΔM2= 1-0=1
ΔM3= 1- (a34a43 + a44)
332211 MMMMMM
M
4432233243244443343223
444334251245241245342312
(1
)1(
aaaaaaaaaaa
aaaaaaaaaaaaM
Ejercicio 1 Encontrar la función de transferencia del siguiente sistema
G1 G2 G3R(s)+
-
G4
H2
H1
C(s)+ + +
-
-
-
1 G1
-H1
G2 G3
-1
1
G4
-H2
R(s) C(s)
1.-
M1 = G1G2G3
M2 = G1G4

31
2.-
Lazos individuales
L1 = -G1G2H1
L2 = -G2G3H2
L3 = -G1G2G3
L4 = -G1G4
L5 = -G4H2
Lazos disjuntos (2/2)
No hay
Δ= 1 + G1G2H1 + G2G3H2 + G1G2G3 + G1G4 + G4H2
3.-
ΔM1= 1-0=1
ΔM2= 1-0=1
2211 MMMM
M
2441321232121
41321
1 HGGGGGGHGGHGG
GGGGGM
1)(
)(
2423212141321
41321
HGHGGHGGGGGGG
GGGGG
sR
sC
RESOLVIENDO POR DIAGRAMAS DE BLOQUES: 1.- H1 G2 2.- G2 G3 + G4 3.- H1 G2 . (G2 G3) + G4 4.- G1 (G2 G3 + G4) .

32
H2 (G2 G3 + G4) + 1 5.- G1 G1 . 6.- 1 + H2 (G2 G3 + G4) = G1 (G2 G3 + G4) (G2 G3 + G4) . 1 + G1 H1 G2 (G2 G3 + G4) (G2 G3 + G4)[1 + H2 (G2 G3 + G4)] + H1 G2 G1 (G2 G3 + G4) 1+ H2 (G2 G3 + G4) G1 (G2 G3 + G4) (G2 G3 + G4) . 7.- (G2 G3 + G4)[1 + H2 (G2 G3 + G4)] + H1 G2 G1 (G2 G3 + G4) . (G2 G3 + G4)[1 + H2 (G2 G3 + G4)] + H1 G2 G1 + G1 G2 G3 + G1 G4 (G2 G3 + G4)[1 + H2 (G2 G3 + G4)] + H1 G2 G1 (G2 G3 + G4) 8.- G1 (G2 G3 + G4) (G2 G3 + G4) . (G2 G3 + G4) [1 + H2 (G2 G3 + G4)] + H1 G2 G1 + G1 G2 G3 + G1 G4 9.- G1 G2 G3 + G1 G4 . 1 + H2 G2 G3 + H2G4 + H1 G2 G1 + G1 G2 G3 + G1 G4 Ejercicio 2
G1 G2 G3 G41 1G5Y1 Y2
G6
-H1 -H2 -H3 -H4
-H5
-H6
1.-
M1 = G1G2G3G4G5
M2 = G6G5
2.-
Lazos individuales
L1 = -G1H1
L2 = -G2H2

33
L3 = -G3H3
L4 = -G4G5H4
L5 = -H6
L6 = -G3 G2 G4 G5 H5
L7 = -G6G5H1H5
L8 = -G6G5H1H2H3H4
Lazos disjuntos (2/2)
L1L3; L1L4; L1L5; L2L5; L2L4; L3L5; L3L7
Lazos disjuntos (3/3)
L1L3 L5
Δ=1+ (L1 + L2 + L3 + L4 + L5 + L6 + L7 + L8) + (L1L3 + L1L4 + L1L5 + L2L5 + L2L4 + L3L5 + L3L7) - L1L3 L5 3.- ΔM1= 1-0=1 ΔM2= 1-(L2 + L3)
5317353425251413187654321
325654321
1
2
)(1
)(1)(
LLLLLLLLLLLLLLLLLLLLLLLLL
LLGGGGGGG
Y
Y
Ejercicio 3
G1G2
G3
G4G5
G9
G6
H1H2
H3 H4
G8
G7
1 1R(s) C(s)
1.-
M1 = G1G2G3G6G7
M2 = G4G5G6G7

34
2.-
Lazos individuales
L1 = G2H2
L2 = H1
L3 = G5H3
L4 = G6H4
L5 = G3 G6 G7 G8 H9
Lazos disjuntos (2/2)
L1L2; L1L3; L1L4; L2L3; L2L4
Lazos disjuntos (3/3)
L1L2 L4
L1L2 L3
Δ=1+ (L1 + L2 + L3 + L4 + L5) + (L1L2 + L1L3 + L1L4 + L2L3 + L2L4) – (L1L2 L4 + L1L2
L3)
3.-
ΔM1= 1- L2
ΔM2= 1-(L1 + L2)
)()()(1
)(1)1(
321421423241312154321
217654274321
1
2
LLLLLLLLLLLLLLLLLLLLL
LLGGGGLGGGGG
Y
Y
Ejercicio 4
1
1
R1+R2V(s)V3(s)1
-1 -1
-1 -1 -1
L1 S
1
R3+R4
1
C1 S
1
L2S+R5
1
C2 S
1.- M1 = L1S . (R1 + R2)(R3 + R4)(L2S + R5) C1SC2S

35
2.- Lazos individuales L1 = -L1 S
R1+R2 L2 = - 1 . (R3 + R4)(C1 S) L3 = - 1 . (L2 S+ R5)(C2 S) L4 = - L1S . R3 + R4 L5 = - 1 . (L2 S+ R5)(C1 S) Lazos disjuntos (2/2) L1L3; L1L5; L4L5 Δ=1+ (L1 + L2 + L3 + L4 + L5) + L1L3 + L1L5 + L4L5 3.- ΔM1= 1- 0 =1
54513154321
21524321
1
1
2
)(1
))()((
LLLLLLLLLLL
SSCCRSLRRRR
SL
Y
Y
UNIDAD IV “ANÁLISIS DE SISTEMAS DE PRIMER ORDEN” 4.1 ANÁLISIS DE LA RESPUESTA TRANSITORIA
Respuesta Temporal = respuesta transitoria + respuesta estacionaria
Respuesta Transitoria: Originada por la respuesta dinámica del sistema y
determina el comportamiento del sistema durante la transición de algún estado
inicial hasta el estado final.
Respuesta Estacionaria: Es la respuesta que perdura cuando el tiempo crece
infinitamente.

36
En la figura 4.1 se observa de manera gráfica la respuesta transitoria y
estacionaria.
Primer Orden Segundo Orden (bajo amortiguamiento)
Figura 4.1 “Gráficas de respuesta transitoria y estacionaria” 4.2 FUNCIONES DE ENTRADA
a) Impulso Unitario (función delta (t))
∞ t = to f(t) = δ(t) L [ F (t)] = 1
0 t ≠ to
b) Escalón Unitario U (t)
1 t ≥ 0 u(t) =
0 t < 1
2 L [U s (t)] = k/s. Si k=1 se tiene U(s)1/s c) Rampa Unitaria (r (t))
t t ≥ 0 r (t) = 0 t < 0

37
L [ r (t)] = m / s2 . Si m=1 se tiene R(s)= 1/s2 Nota: m = pendiente de la rampa 4.3 ANÁLISIS DE SISTEMAS DE PRIMER ORDEN Ejemplo Analizar I (s) , VR(s) , VL (s) de acuerdo a los datos presentados en el sistema.
Datos: Ve(t) = 10 Vcc
L = 0.01 H R = 1 KΩ Ve (s) = I (s) [R + LS] I(s) = 1 I (s) = Ve (s) = 10 . Ve(s) LS + R LS + R s (LS+R) I (s) = 10/L = 10 1 = L -1 = 10 1/R (1 – e-R/L t) = 10 (1 – e-R/L t) S(S+ R/L) L S (S + R/L) L L R I (s) = A1 + A2 10 = A1 (S + R/L) + A2 (S) S S+R/L L Cuando S=0 Cuando S = -R/L 10 = A1 R A1 = 10 10 = -A2 R A2 = -10 L L R L L R I (s) = (10/R) - (10/R) = 10 1 - 1 = 10 (1 – e-R/L t) S S+(R/L) R S S+(R/L) R VR(s) = R I(s) I(s) = VR(s) / R Ve(s) = (VR/R) [LS+R] VR/Ve = R/ (LS+R)
L
V(t) RI(t)

38
VR(s) = 10 R = 10 R = 10R/L = 10R 1 . S LS+R S (LS+R) S(S+ R/L) L S (S + R/L) L -1 = [VR(s)] = 10R 1/R (1 – e-R/L t) L L VR(s) = 10 (1 – e-R/L t) VR(s) = i (t)R= 10 (1 – e-R/L t) R = 10 (1 – e-R/L t) R VL(t) = L di i(t) = 10 (1 – e-R/L t) dt R d i(t) = - 10 e-R/L t = -10 e-R/L t (- R/L) = 10 e-R/L t dt R R L VL(t) = L ( 10/L e-R/L t ) = 10 e-R/L t Ve(s) = I (s) [ R + LS] VL(s) = L S I(s) I (s) = VL(t) LS VR(s) = VL/ LS [ R + LS] VC = (1 / CS) I(s) I(s) = C S VC(s) VL = LS VL = 10 LS = 10L = 10L/L = 10 Ve LS + R S LS + R LS + R S + R/L S + R/L VL = 10 e-R/L t
El análisis se hace de los gráficos obtenidos.

39
i (t) = 10/R (1-e-R/L t)
VR(t)
= 10 (1-e-R/L t)
VL(t)
= 10 (e-R/L t)
10/R
10
10
t
t
t
UNIDAD V “ANÁLISIS DE SISTEMAS DE SEGUNDO ORDEN” 5.1 SISTEMAS DE SEGUNDO ORDEN Función de transferencia de lazo cerrado de un sistema de 2o orden es:
Y (s) = n2 .
R (s) s2 + 2 n S + n2
Obteniendo las raíces del denominador se tiene:
Si, 2 = - n + j n (1 - 2)½
n = frecuencia natural no amortiguada
= relación de amortiguamiento
También se tiene = n = = n (1 - 2)½
= constante de amortiguamiento
= frecuencia de oscilación
a = 1 b = 2 n c = n2

40
La figura 5.1 ilustra la relación entre la localización de las raíces de la ecuación
característica y , , n y .
Donde:
n = distancia radial de las raíces al origen del plano S
= es la parte real de las raíces
= es la parte imaginaria de las raíces
= coseno del ángulo entre la línea radial de las raíces están en el semiplano
izquierdo
Figura 5.1 “Relación entre los parámetros y , , n y .”
Las regiones del plano s se identifican con el amortiguamiento de la siguiente
forma y como se muestra en la figura 5.2.
a) En el semiplano izquierdo corresponde al amortiguamiento positivo: El
sistema es estable
b) En el semiplano derecho corresponde al amortiguamiento negativo: Sistema
inestable
c) El eje imaginario corresponde a cero amortiguamientos: Sistema críticamente
estable.

41
Figura 5.2 “Clasificación de los sistemas de acuerdo al valor del
amortiguamiento”
Dinámicas del sistema con respecto al valor de
a) > 0 , Si 2 = - n + n (2-1)½
Sobreamortiguado
b) = 1 , Si 2 = - n Amortiguamiento Crítico
c) 0< < 1 , Si 2 = - n + jn (1- 2 )½ Subamortiguamiento
d) = 0 , Si 2 = j n
No amortiguado

42
Ejercicio 1 Determinar el tipo de respuesta del siguiente sistema
Analizar Ve (t) = 10Vcc Vc(s) R1 = R2 = 1 K Ω C = 10µf L = 0.01 H
Ve (s) = I (s) [LS + 2R1 + 1/CS] Ve(s) = I (s) LCS2 + 2RCS + 1 CS Vc (s) = 1/CS I(s) I(s) = CS Vc(s) Ve(s) = CSVc LCS2 + 2RCS + 1 CS Vc(s) = 1 . Ve(s) LCS2 + 2RCS + 1 1 = LC ωn = (1 / LC)1/2 ωn
2 2ε = 2RC ε = 31.62 >> 1 Sistema sobreamortiguado ωn
Ve
R2L
C
R1
i(t)

43
5.2 ESPECIFICACIONES DE LA RESPUESTA TRANSITORIA DE LOS SISTEMAS DE SEGUNDO ORDEN Recordando:
Y (s) = n2 ; R(S) = 1
R (s) s2 + 2 n S + n2 S
Y (S) = n2 ;
S (s2 + 2 n S + n2 )
L -1 [Y (s)] = y (t) = 1 – e-R/L t sen ωn (1 – ε2)1/2 t (1 – ε2)1/2 φ = tan (1 – ε2)1/2 ε Esto indica que se requiere tener un sistema subamortiguado para determinar las
especificaciones que a continuación se describen. Cuyas características se
muestran en la figura 5.3
para 0 < ε < 1 Figura 5.3 “Características de un sistema subamortiguado”

44
Las especificaciones de la respuesta transitoria para un sistema de segundo
orden se muestran gráficamente en la figura 5.4. Posteriormente se explican de
manera general cada una de ellas.
Sobrepaso Máximo
MpY (t)
t
100%
90%
50%
10%
tp
tstr
td
Figura 5.4 “Parámetros de la respuesta transitoria para un sistema de segundo
orden”
a) Sobrepaso Máximo (p): valor pico máximo de la curva de respuesta medida desde el valor del escalón.
)/( dep
σ = constante de amortiguamiento
d = frecuencia de oscilación b) Tiempo Pico (tp, tiempo máximo): Tiempo en el cual se alcanza el sobrepaso máximo
d
tp
c) Tiempo de Retardo (td): Es el tiempo en que tarda la señal en alcanzar la mitad del valor final.

45
n
td
2439.025.01.1
d) Tiempo de levantamiento (tr): Es el timpo para que la respuesta al escalón alcance del 10% al 90% de su valor final.
n
tr
5.28.0
e) Tiempo de asentamiento (ts):
n
ts
2.3 0 < ε < 0.69
n
ts
5.4 ε > 0.69
Ejemplo 1 Se tiene un sistema de segundo orden con la siguiente función de transferencia:
22
2
2)(
)(
nn
n
SSsC
sY
ε= 0.6 ωn= 5 rad/seg
p = e – (σ/ωd) π σ = ε ωn ωd = ωn (1- ε2)1/2 σ = 0.6 (5) = 3 ωd = 5 (1- 0.62)1/2 = 4
p = e – (3/4) (3. 1416) = 0.09477 * 100 = 9.4%
segundostrn
46.05
)6.0(5.28.05.28.0
segundostsn
06.15)6.0(
2.32.3
segundostpd
78.04
1416.3
segundostdn
26.05
)6.0(439.0)6.0(25.01.1439.025.01.1 22

46
Sobrepaso Máximo
MpY (t)
t
100%
90%
50%
10%
tp=0.78 seg
ts=1.06 seg
9.4%
tr=0.46 segtd=0.26 seg
Ejercicio 2
Determinar del siguiente sistema los parámetros: p , tr, ts , tp y td
Si se tiene: K=1 B=3 M=25
f (t) =M d2 Y(t) + B d Y(s) + K Y(s) dt2 dt F (s) = M S2 Y(s) + K Y(s) + B S Y(s) F (s) = Y(s) (MS2 + BS + K) Y (s) = 1 . F (s) M S2 + BS + K
nK
M
1
25
1
M
Kn
wn = 0.2 rad/seg
m
BK
f(t)
Y (t)
47
K
B
n
2 3.0
)1(2
)2.0(3
2
)(
K
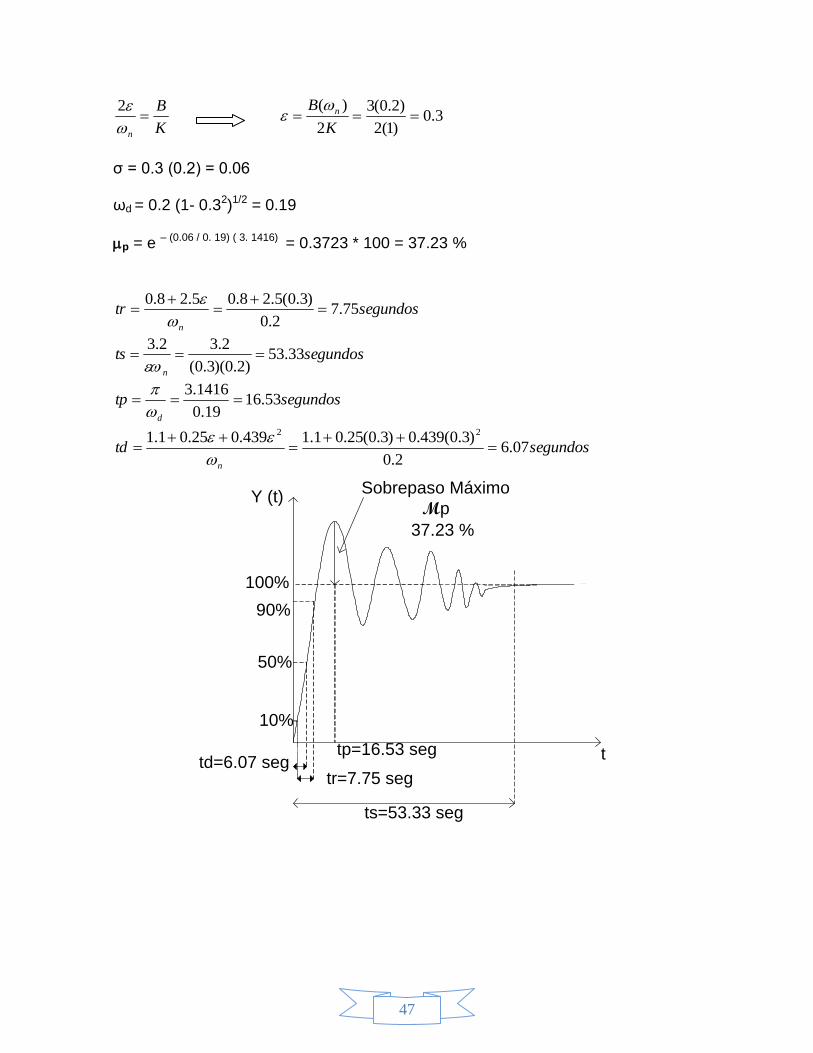
B n
σ = 0.3 (0.2) = 0.06 ωd = 0.2 (1- 0.32)1/2 = 0.19
p = e – (0.06 / 0. 19) ( 3. 1416) = 0.3723 * 100 = 37.23 %
segundostrn
75.72.0
)3.0(5.28.05.28.0
segundostsn
33.53)2.0)(3.0(
2.32.3
segundostpd
53.1619.0
1416.3
segundostdn
07.62.0
)3.0(439.0)3.0(25.01.1439.025.01.1 22
Sobrepaso Máximo
MpY (t)
t
100%
90%
50%
10%
tp=16.53 seg
ts=53.33 seg
37.23 %
tr=7.75 segtd=6.07 seg

48
UNIDAD VI “ESTABILIDAD ABSOLUTA” Para abordar el tema de la estabilidad se cree necesario abordar un tema
relevante concerniente a la definición de lo qué son los polos y ceros de manera
que así se iniciará esta unidad.
6.1 POLOS Y CEROS
ENTRADA
SALIDATF :. por ejemplo:
)(
)(
)2)(1(
12
23
12)(
2 sa
sb
ss
s
ss
ssF
De la función anterior se tiene que los valores de S tales que a(s) =0 llevará a F(s)
al infinito y esos valores se le conoce como POLOS de F(s). Por otro lado los
valores de S que hacen que b(s)=0 llevarán a F(s) =0 y a esos valores se les llama
CEROS.
Del ejemplo anterior se tiene:
Ceros 2s + 1 = 0 s = - ½ Polos s + 1 = 0 s = -1 s + 2 = 0 s = -2 Graficando se tiene:
Polos Cero
-2 -1 -1
2
IIm
IRe
Los polos y los ceros pueden describir cuál será la señal de salida que se tiene en un sistema específico. Por ejemplo: El polo S + 1 proporciona e-t El polo S + 2 proporciona e-2t

49
Graficando se tiene
-2 -1
IIm
IRe
De la gráfica se observa que si s = -1(e-t), la señal decae más lentamente que si s
= -2(e-2t), es decir s = -1 es un polo más lento que s 0 -2. Con esto se concluye
que los polos más alejados del eje imaginario están asociados a señales que
decaen más rápidamente que los polos más cercanos al mismo eje.
6.2 ESTABILIDAD Un sistema estable se define como aquel que tiene una respuesta limitada, esto
quiere decir que el sistema es estable si estando sujeto a una entrada o
perturbación limitada su respuesta es de magnitud limitada. La respuesta a una
condición inicial, dará como resultado una respuesta decreciente, neutral o
creciente, esto quiere decir: estable, críticamente estable, e inestable
respectivamente.
Una condición necesaria para que un sistema de retroalimentación sea estable es
que todos los polos de la función de transferencia, tengan partes reales negativas.
Para responder a la pregunta si el sistema es estable, se han planeado 3 enfoques
diferentes:
a) En el plano S (Criterio de Routh-Hurwitz)
b) En la frecuencia jω (Criterio de Nyquist)
c) En el tiempo (Variable de Estado)

50
La estabilidad relativa es la propiedad que se mide por los tiempos relativos de
estabilización de cata par de raíces.
6.3 CRITERIO DE ROUTH-HURWITZ
Para abordar este criterio será de mayor facilidad si se hace a través de ejemplos.
Ejemplo:
Utilizando el Criterio de Routh-Hurwitz indicar si el sistema es estable.
F(s) = Ecuación Característica: 2s4 + s3 + 3s2 + 5s + 10 = 0
Se crea la Tabla
s4 2 3 10
s3 1 5
s2 A1 A2
s1 B1
s C1
A1 = 3(1) - 5(2) = 3 – 10 = -7 1 A2 = 1(10) – 0 = 10 1 B1 = A1(5) – A2(1) = -35-10 = -45 = 45 A1 -7 -7 7 Comprobación B1 C1 = B1A2-0 = B1A2 = 10 B1 B1 Se vuelve a crear una tabla
s4 2
s3 1
s2 -7
s1 45/7
s 10
Si existe un cambio de signo en los coeficientes de la primera columna. el sistema
es inestable.

51
En este caso hay dos cambios de signo por lo tanto el sistema es inestable.
Casos Especiales CASO I F(s) = s3- 3s + 2 = 0
s3 1
s2 0
s1 A1
s 2
A1 = 0(-3) - 2(1) = ∞ 0 Se vuelve a crear la tabla y se coloca ε en vez del cero
s3 1
s2 ε
s1 A1
s 2
A1 = ε (-3) - 2(1) = -2 ε ε Se vuelve a crear la tabla
s3 1
s2 ε
S1 -2/ ε
s 2
Como hay cambio de signo el sistema es inestable CASO II F(s) = s4 + s3 - 3s2 – s + 2 = 0
s4 1 -3 2
s3 1 -1
s2 A1 A2
s1 B1
s C1

52
A1 = 3 + 1 = -2 1 A2 = 2 – 0 = 2 1 B1 = -A1 – A2 = 2 – 2 = 0 A1 2 Por lo tanto del renglón anterior se extrae una ecuación auxiliar A(s) = -2 s2 + 2s y se deriva d A(s) = -4s + 2 y se toma el coeficiente perteneciente a la s dA
s4 2
s3 1
s2 -2
s1 -4
s 2
Como hay dos cambios de signo el sistema es inestable Ejercicio 1
10
S + 6S + 2S + 4S + 5+
-
C(s)
V1
5 4 3 2
5426
10..
2345
ssssTF
10)5426(
10..
2345
ssssTF
15426
10..
2345
ssssTF
F(s) = s5 + 6s4 + 2s3 + 4s2 + 15

53
s5 1 2 0
s4 6 4 15
s3 A1 A2
s2 B1 B2
s1 C1
s 15
A1 = 12 - 4 = 8 6 6 A2 = 0 – 15 = -15 6 6 B1 = A1(4) – A2(6) = 61 A1 4 B2 = A1(15) – 0 = 15 A1 C1 = B1A2-B1A1 = -465 B1 122
s5 1
s4 6
s3 8/6
s2 61/4
s1 -65/122
s 15
Como hay dos cambios de signo el sistema es inestable Ejemplo Encontrar el valor de k para que el siguiente sistema sea estable
011021064
GH(s)2345
sssss
k
F(s) = s5 + 4s4 + 6s3 + 10s2 + 2s + (10+k) = 0

54
s5 1 6 2
s4 4 10 10+k
s3 A1 A2
s2 B1 B2
s1 C1
s 10+k
A1 = 24 - 10 = 7 4 2 A2 = 8 – 10-k = -2-k = -1 (2+k) = -0.5 – 0.25k 4 4 4 B1 = A1(10) – A2(4) = 2(37+k) A1 7 B2 = A1 (10+k) = 10+k A1 C1 = B1A2-B1A1 B1
7
)37(2
2
7)10(]2[
4
1
7
)37(2
1 K
KKK
C
B1 >0 2(37+K) >0 K > -37 7 10+K >0 K > -10 C1 >0 Para el caso de la ecuación de C1 sólo se trabajará con la parte superior, ya que la inferior ya la tenemos
014
)10(49)2)(37()10(
2
7]2[
4
1
7
)37(21
kkkKK
KC

55
0]56488[14
56488
14
494903774 222
1
kkkkkkk
C
0)81)(7(1 kkC
(+) (-) < 0 ó (-) (+) < 0 k + 7 > 0 k + 81 < 0 k + 7 < 0 k + 81 > 0 k > -7 ∩ k < -81 k < -7 ∩ k > -81
-81 -7 U
-81 -7
C1 > 0 (-81,-7) Uniendo los tres rangos
-81 -37 -7 0-10
El rango es: (-10,-7) Ejercicio 2 Encontrar el valor de k para que el siguiente sistema sea estable
1132
)1(GH(s)
23
sss
sk
F(s) = s3 + 2s2 + 3s + [1+k(s+1)] = s3 + 2s2 + (3+k)s + (k+1)
s3 1 3+k
s2 2 k+1
s1 A1
s k+1

56
A1 = 2(3+k) - (k+1) > 0 2 En este caso se trabajará con la parte superior, ya que el 2 es mayor a cero 6+2k-k+1 k+7>0 k > -7 K+1 >0 k > - 1 Uniendo los 2 rangos
-7 -1
El rango es: k > -1
UNIDAD VII “LUGAR GEOMÉTRICO DE LAS RAÍCES”
La técnica del lugar geométrico de las raíces es un método gráfico para dibujar la
posición de las raíces en el plano S a medida que se varía un parámetro. Este
esquema muestra información de una estabilidad relativa y absoluta de un
determinado sistema.
El lugar geométrico de las raíces se encuentra en el eje real del plano S. Existen
algunas categorías del lugar geométrico que son las siguientes
RL: Porción del lugar geométrico de las raíces donde k es positiva 0<k< t ∞. Se
encuentra en la sección donde el número total de polos y ceros de G(s) H(s) a la
derecha es impar.
CRL (Lugar Geométrico de las Raíces Complementario): Porción del lugar
geométrico de las raíces donde k es negativa -∞ <k<0. Región donde se
encuentra a la derecha de la sección donde el número de polos y ceros es par

57
Lugar Geométrico de las Raíces: Se refiere al lugar geométrico de las raíces
total donde -∞ < k < ∞.
La construcción de la gráfica LGR se basa en el conocimiento de los polos y ceros
de la función G(s)H(s).
Ejemplo:
Encontrar el lugar geométrico de la siguiente función:
)1)(1)(4(
)2(
)22)(4(
)2(GH(s)
2 jsjsss
sk
ssss
sk
1) Polos (4) P1 = 0 P2 = -4 P3 = -1-j P4 = -1+j 2) Ceros (1) Z1 = -2 Z2 = Z3 = Z4 = ∞ 3) No. De ramas (Grado máximo del denominador) N = 4 4) Simetría Si es simétrico Nota: El lugar geométrico de las raíces es simétrico respecto al eje real del plano S. 5) Zonas del lugar geométrico de las raíces sobre el eje real
RL
RL
RL CRL
IIm
IRe

58
6) Asíntotas Número Angulo de Inclinación N.A. = Polos – Ceros = 4 – 1 = 3
Angulo de Inclinación: ZP
KBK
180)12(
Para k = 0
0
0 603
180
3
180]1)0(2[
B
Para k = 1
0
1 1803
540
3
180]1)1(2[
B
Para k = 2
0
2 3003
900
3
180]1)2(2[
B
7) Intersección de las asíntotas σ = ∑ Partes reales de los polos - ∑ Partes reales de los ceros Polos – Ceros σ = (0 – 4 – 1 – 1) – (-2) = - 6 + 2 = - 4 = -1.33 3 3 3 8) Ángulos de partida de los polos complejos
IIm
IRe
θ1
θ2
θ3
α
θ1'q
1=θ
4
∑ Ángulos de los Ceros - ∑ Ángulos de los Polos = 180o α - (θ1 + θ2 + θ3 + θ4) = 180o θ1’ = tan -1 (1/1) = 45o θ1 = 180-45= 135o θ2 = 90o θ3 = tan -1 (1/3) = 18.43o α = tan -1 (1/1) = 45o

59
45 – (135 + 90 + 18.43 + θ4) = 180 θ4 = 45 – 180 – 243.43 θ4 = -378.43 + 360 θ4 = -18.43o 9) Intersección con el eje imaginario
a) Se obtienen condiciones de estabilidad para k. b) Se toma el valor crítico de k y se sustituye en la ecuación establecida sobre
el renglón de s2 c) De esa ecuación se obtiene la intersección con el eje imaginario
Encontrar el valor de k para que el siguiente sistema sea estable
)22)(4(
)2(GH(s)
2
ssss
sk
02)22)(4(GH(s)1 2 kksssss
F(s) = s4 + 6s3 + 10s2 + (8+k)s + 2k = 0
s4 1 10 2k
s3 6 A2
s2 A1 s1 B1
s 2k
A1 = 60 – 8 -k = 52-k
6 6 52 – k > 0 k < 52 A2 = 2k
52
41628
6
52
1286
)522
1
K
KK
K
KK
B
-k2 – 28k + 416 > 0 k2 + 28k - 416 < 0

60
(k - 10.7) (k + 38.7) (+) (-) < 0 ó (-) (+) < 0 k - 10.7 > 0 k + 38.7 < 0 k – 10.7 < 0 k + 38.7 > 0 k > 10.7 ∩ k < -38.7 k < 10.7 ∩ k > -38.7
0 10.7-38
U -38 10.70
Uniendo los tres rangos
0 5210.7-38
El rango es: 0 < k < 10
s4 1 10 2k
s3 6 8+k
s2 (52-k)/6 2k s1 B1
s 2k
A(s) = [(52 – k )/6]s2 + 2k = 0 Tomando del rango el valor de k entonces: Si k = 10 despejando a s de la ecuación tenemos que. S = + 1.69 j Graficando:
IIm
IRe
1.69
-1.69

61
La gráfica final: IIm
IReσ-2-4
1.69
-1.69
Bo=60
B2=-60
B1=180
Ejercicio 1 Encontrar el lugar geométrico de la siguiente función:
)44)(44()328(GH(s)
2 jsjss
k
sss
k
1) Polos (4) P1 = 0 P2 = -4 + 4j P3 = -4 - 4j 2) Ceros (0) Z2 = Z3 = Z4 = ∞ 3) No. De ramas (Grado máximo del denominador) N = 3 4) Simetría Si es simétrico 5) Zonas del lugar geométrico de las raíces sobre el eje real
RL
RL
IIm
IRe
6) Asíntotas
62
N.A. = Polos – Ceros = 3 – 0 = 3 Para k = 0
0
0 603
180
3
180]1)0(2[
B
Para k = 1
0
1 1803
540
3
180]1)1(2[
B
Para k = 2
0
2 3003
900
3
180]1)2(2[
B
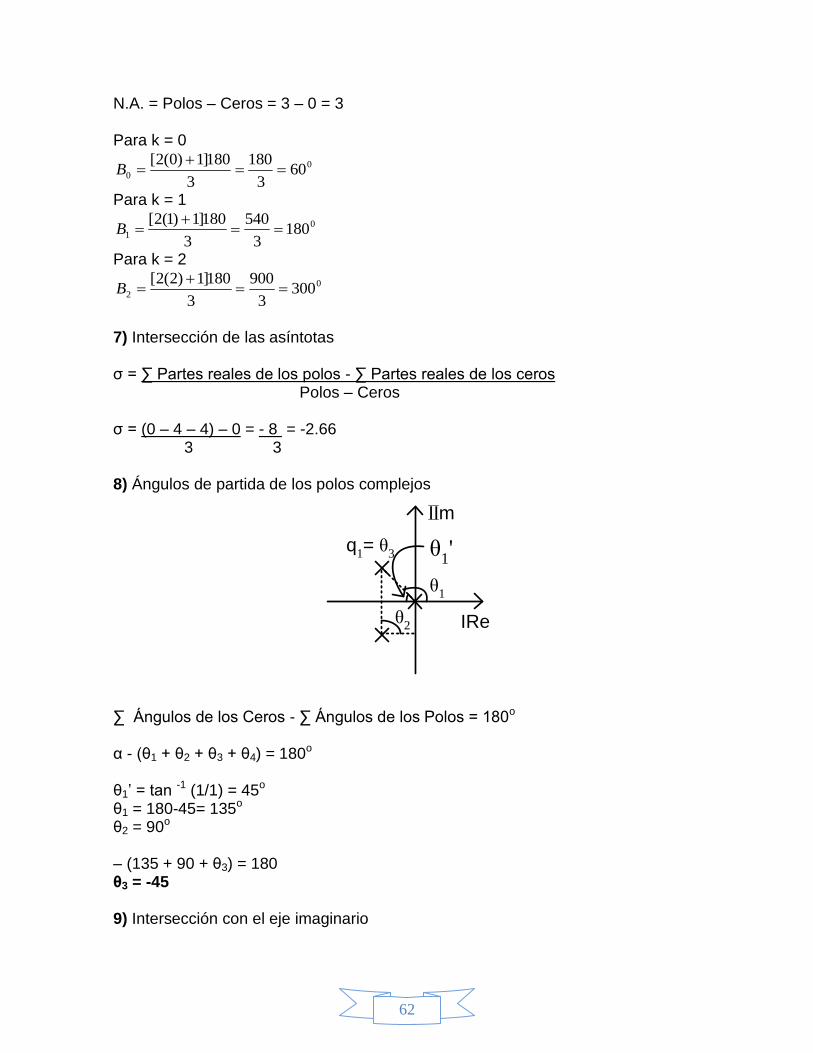
7) Intersección de las asíntotas σ = ∑ Partes reales de los polos - ∑ Partes reales de los ceros Polos – Ceros σ = (0 – 4 – 4) – 0 = - 8 = -2.66 3 3 8) Ángulos de partida de los polos complejos
IIm
IRe
θ1
θ2
θ1'q
1= θ
3
∑ Ángulos de los Ceros - ∑ Ángulos de los Polos = 180o α - (θ1 + θ2 + θ3 + θ4) = 180o θ1’ = tan -1 (1/1) = 45o θ1 = 180-45= 135o θ2 = 90o – (135 + 90 + θ3) = 180 θ3 = -45 9) Intersección con el eje imaginario

63
F(s) = s3 + 8s2 + 32s + k = 0
s3 1 32
s2 8 k
s1 A1
s k
A1 = (8)(32) – k
8 256 – k > 0 k < 256 k > 0
0 256
El rango es: 0 < k < 256
s3 1 32
s2 8 k
s1 (256-k)/8
s k
A(s) = 8s2 + k = 0 Si k = 256 despejando a s de la ecuación tenemos que. S = + 5.6 j La gráfica final:
IIm
IReσ
5.6
-5.6
Bo=60
B2=-60
B1
180

64
Ejercicio 2 Encontrar el lugar geométrico de la siguiente función:
)1)(1)(2(
)2(
)22)(2(
)5(GH(s)
2 jsjss
sk
sss
sk
1) Polos P1 = -4 P2 = -1-j P3 = -1+j 2) Ceros (1) Z1 = -5 Z2 = Z3 = ∞ 3) No. De ramas (Grado máximo del denominador) N = 3 4) Simetría Si es simétrico 5) Zonas del lugar geométrico de las raíces sobre el eje real
RL
CRL
IIm
IRe
CRL
6) Asíntotas N.A. = Polos – Ceros = 3 – 1 = 2 Para k = 1
0
1 902
180
2
180]12[
B
Para k = 2
0
2 2702
180]1)2(2[
B
7) Intersección de las asíntotas σ = (– 2 – 1 – 1) – (-5) = 0.5 2 8) Ángulos de partida de los polos complejos

65
IIm
IRe
θ1
θ2
θ3
α
∑ Ángulos de los Ceros - ∑ Ángulos de los Polos = 180o α - (θ1 + θ2 + θ3 + θ4) = 180o θ1 = 45o θ2 = 90o α = tan -1 (1/4) = 14.3o 14.3 – (45 + 90 + θ3) = 180 θ3 = 59o 9) Intersección con el eje imaginario F(s) = s3 + 4s2 + (6+k)s + (4+5k) = 0
s3 1 6+k
s2 4 4+5k
s1 A1
s 4+5k
A1 = 4(6 + k)-(4+5k) = -k+20 4 4 – k + 20 > 0 k < 20 4 + 5k > 0 k > -4/5
-4/5 200 El rango es: -4/5 < k < 20
s3 1 6+k
s2 4 4+5k
s1 (-k+20)/4
s 4+5k

66
A(s) = 4s2 + (4+5k) = 0 Si k = 20 despejando a s de la ecuación tenemos que. S = + 5.3j Graficando:
IIm
IReσ
-5.6
5.6
-2-5
Ejercicio 3 Encontrar el lugar geométrico de la siguiente función:
)2)(1(GH(s)
sss
k
1) Polos P1 = 0 P2 = -1 P3 = -2 2) Ceros (1) Z1 = Z2 = Z3 = ∞ 3) N = 3 4) Simetría Si es simétrico 5) Zonas del lugar geométrico de las raíces sobre el eje real
RLRL CRL
IIm
IRe
6) Asíntotas N.A. = Polos – Ceros = 3 – 0 = 3 Para k = 0

67
0
0 603
180
3
180]1)0(2[
B
Para k = 1
0
1 1803
540
3
180]1)1(2[
B
Para k = 2
0
2 3003
900
3
180]1)2(2[
B
7) Intersección de las asíntotas σ = (0 – 2 – 1) – (0) = -1 3 8) Ángulos de partida de los polos complejos No hay
IIm
IReσ
B1=180 Bo
60
B2
-60
9) Intersección con el eje imaginario F(s) = s3 + 3s2 + 2s + k = 0
s3 1 2
s2 3 k
s1 A1
s k
A1 = 6 - k 3 – k + 6 > 0 k < 6 k > 0
0 6

68
El rango es: 0 < k < 6
s3 1 2
s2 3 k
s1 (6-k)/3
s k
A(s) = 3s2 + k = 0 Si k = 6 despejando a s de la ecuación tenemos que. S = + 1.44j 10) Puntos de ruptura F(s) = s3 + 3s2 + 2s + k = 0 k = - s3 - 3s2 - 2s dk = - 3s2 - 6s - 2 ds Resolviendo la ecuación: s1 = -1.5, s2 =-0.422 Por lo tanto el punto de ruptura es -0.422 Graficando:
IIm
IReσ
B1=180
Bo
60
B2
-60
1.44
-1.44
Ejercicio 4: Encontrar el lugar geométrico de la siguiente función:
)4)(3)(1(
)2(GH(s)
ssss
sk
1) Polos (4)

69
P1 = 0 P2 = -1 P3 = -3 P4 = -4 2) Ceros (1) Z1 = -2 Z2 = Z3 = Z4 = ∞ 3) N = 4 4) Simetría Si es simétrico 5) Zonas del lugar geométrico de las raíces sobre el eje real
RLRLRL CRL
IIm
IRe
CRL
6) Asíntotas N.A. = Polos – Ceros = 4 – 1 = 3 Para k = 0
0
0 603
180
3
180]1)0(2[
B
Para k = 1
0
1 1803
540
3
180]1)1(2[
B
Para k = 2
0
2 3003
900
3
180]1)2(2[
B
7) Intersección de las asíntotas σ = (–3 – 1 – 4) – (-2) = - 6 = -2 3 3 8) Ángulos de partida de los polos complejos No hay 9) Intersección con el eje imaginario

70
F(s) = s4 + 83 + 19s2 + (12+k)s + 2k = 0
s4 1 19 2k
s3 6 12+k
s2 A1 A2
s1 B1
s 2k
A1 =152 – (12+k) = 140-k
7 8 140 – k > 0 k < 140 A2 = 2k
140
1680
8
140
16128
)1402
1
K
K
K
kKK
B
-k2 +1680 > 0 k2 - 1680 < 0 (k - 41) (k + 41) (+) (-) < 0 ó (-) (+) < 0 k - 41 > 0 k + 41 < 0 k – 41 < 0 k + 41 > 0 k > 41 ∩ k < -41 k < 41 ∩ k > -41
0 41-41 U
-41 410
Uniendo los tres rangos
0 14041-41
El rango es: 0 < k < 41
s4 1 10

71
2k
s3 6 8+k
s2 (140-k)/8 2k s1 B1
s 2k
A(s) = [(140 – k )/8]s2 + 2k = 0 Si k = 41 despejando a s de la ecuación tenemos que. S = + 2.57 j 10) Puntos de ruptura F(s) = s4 + 83 + 19s2 + (12+k)s + 2k = 0 k = - s4 - 8s3 - 19s2 – 12s s+2 dk = (s+2)(-4s3 – 24s2 – 38s – 12) – (- s4 – 8s3 – 19s2 – 12s) = -3s4 – 24s3 – 67s2 – 76s - 24 ds (s+2)2 s2 + 4s + 4 Resolviendo la ecuación, s debe ser -0.5 Graficando:
IIm
IRe
Bo
60
B2
-60
B1=180
-0.5σ
Ejercicio 5
)42)(42)(4()204)(4(GH(s)
2 jsjsss
k
ssss
k
1) Polos (4) P1 = 0 P2 = -4 P3 = -2-4j P4 = -2+4j 2) Ceros (0) Z1 = Z2 = Z3 = Z4 = ∞

72
3) N = 4 4) Simetría Si es simétrico 5) Zonas del lugar geométrico de las raíces sobre el eje real
RL
RL
IIm
IRe
CRL
6) Asíntotas N.A. = Polos – Ceros = 4 – 0= 4 Para k = 0
0
0 454
180
4
180]1)0(2[
B
Para k = 1
0
1 1354
540
4
180]1)1(2[
B
Para k = 2
0
2 1354
900
4
180]1)2(2[
B
Para k = 3
0
3 454
900
4
180]1)2(2[
B
7) Intersección de las asíntotas σ = ∑ Partes reales de los polos - ∑ Partes reales de los ceros Polos – Ceros σ = (0 – 4 – 2 – 2) = -2 4 8) Ángulos de partida de los polos complejos

73
IIm
IRe
q1=θ
4
θ1θ
1'
θ2
θ3
∑ Ángulos de los Ceros - ∑ Ángulos de los Polos = 180o α - (θ1 + θ2 + θ3 + θ4) = 180o θ1’ = tan -1 (4/2) = 63.43o θ1 = 180-63.4= 116.56o θ2 = 90o θ3 = tan -1 (4/2) = 63.43o – (116.56 + 90 + 63.43 + θ4) = 180 θ4 = -450o = -90o 9) Intersección con el eje imaginario F(s) = s4 + 8s3 + 36s2 + 80s + k = 0
s4 1 36 k
s3 8 80
s2 A1 A2
s1 B1
s k
A1 = 288 – 80 = 26
8 A2 = k k > 0 B1 = 2080 – 8k
26 2080 – 8k > 0 k < 26
2600
El rango es: 0 < k < 260

74
s4 1 36 k
s3 8 80
s2 26 k
s1 (2080-8k)/26
s k
A(s) = 26s2 + k = 0 Si k = 26 despejando a s de la ecuación tenemos que. S = + 3.16 j 10) Puntos de ruptura F(s) = s4 + 8s3 + 36s2 + 80s + k = 0 k = - s4 - 8s3 - 36s2 - 80s dk = - 4s3 - 24s2 - 72s - 80 ds Resolviendo la ecuación,el punto de ruptura se encuentra entre 0 y -4 En este ejercicio existen dos posibilidades de resultados
IIm
IRe
B1
B0
B2
B3σ
IIm
IRe
B1
B0
B2
B3σ
UNIDAD VIII “CONTROLADORES”
8.1 INTRODUCCIÓN
El controlador es un elemento en el sistema de lazo cerrado que tiene como
entrada la señal de error y produce una salida que se convierte en la entrada de la
planta. Un controlador tiene como objetivo disminuir los efectos que una
perturbación tiene sobre el proceso de la planta, de manera que siempre se
mantengan los requerimientos del proceso. En la figura 8.1 se muestra mediante

75
un diagrama de bloques la representación de un controlador (de forma general) y
una planta en lazo cerrado.
Figura 8.1 “Diagrama de un sistema de lazo cerrado con un controlador”
Un controlador automático compara el valor real de la salida de una planta con la
entrada de referencia (valor deseado), determina el error y produce una señal de
control que reducirá el error a cero a un valor muy pequeño. La forma como el
controlador produce la señal de control, se denomina acción de control. Se pueden
clasificar las acciones de control como sigue:
1.- Control Proporcional (P).
2.- Control Integral (I).
3.- Control Proporcional-Integral (PI).
4.- Control Proporcional-Derivativo (PD).
5.- Control Proporcional-Integral-Derivativo (PID).
Las cuales serán abordadas en esta unidad.
8.2 CONTROL PROPORCIONAL (P).
Con el control proporcional la salida del controlador es directamente proporcional a
su entrada; la entrada es la señal de error, e, la cual es una función del tiempo, de
manera que:
Salida = Kp e
Donde:
Entrada Controlador
Gc (s)
Proceso
Gp (s)
Perturbación
+
-
Salida

76
Kp : es una constante llamada ganancia proporcional
La salida del controlador sólo depende de la magnitud del error en el instante a
considerar. El control proporcional es esencialmente un amplificador con ganancia
ajustable.
La función de transferencia del controlador se le denomina Gc (s) y se define
como:
Gc (s) = Kp
En la figura 8.2 se grafica la salida del controlador contra el error, donde se
observa que la gráfica es una línea recta con pendiente de Kp en la banda
proporcional.
Figura 8.2 “Gráfica de salida de un Controlador con respecto al error”
Suele expresarse la salida del controlador como un porcentaje de la posible salida
total de éste, de manera que un 100% de cambio en la salida del controlador
indica un cambio en el error desde un extremo a otro de la banda proporcional.
Concluyendo:
Kp = 100 . Banda Proporcional
Salida del
controlador
Error
Banda Proporcional
0

77
El control proporcional es sencillo de aplicar, sólo se requiere de un amplificador
como se observa en la figura 8.3. En la cual se muestra que el OPAM_1 es el
amplificador y el OPAM_2 representa un inversor. De aquí se deduce que:
Kp = R2 . R1
Figura 8.3 “Circuito de un Controlador Proporcional”
En un sistema de control proporcional se tiene una función e transferencia de lazo
abierto:
Go(s) = KpGp(s)
Donde Gp(s) es la función de transferencia de la planta. Obsérvese la figura 8.4.
Figura 8.4 “Sistema con Controlador Proporcional”
El controlador proporcional no introduce nuevos ceros o polos al sistema,
simplemente determina la ubicación de los polos de lazo cerrado, debido a que la
función de transferencia de lazo cerrado con el controlador y la retroalimentación
unitaria (como se ve en la figura 8.4) es:
G(s) = Kp Gp(s) .
Entrada Controlador
Kp
Proceso
Gp (s)
+
-
Salida
R1
R2
OPAM_1 -
+
R
R
-
+ SALIDA
ERROR
OPAM_2

78
1+ Kp Gp(s)
De esta manera la ecuación característica (1+KpGp(s)) tiene los valores de sus
raíces afectados por Kp.
Algunos efectos del Controlador Proporcional son:
Puede tenerse una oscilación temporal al llegar el controlador al valor
final de la variable, aunque tarde o temprano estas oscilaciones
desaparecen si la banda proporcional está ajustada de manera
adecuada.
Este tipo de control trabaja muy bien sólo en aquellos sistemas en los
que los cambios de proceso son muy pequeños y lentos.
El que las perturbaciones ocurran con lentitud son de ayuda para que la
banda proporcional se ajuste de manera estrecha, sin embargo el tener
una banda proporcional pequeña puede causar la oscilación en el valor
de la variable a controlar.
Finalmente, se puede indicar que el Control Proporcional es en esencia una
amplificador con ganancia ajustable.
8.3 CONTROL INTEGRAL (I).
En un controlador con acción de control integral, la salida es proporcional a la
integral de la señal de error e con respecto al tiempo, es decir:
Salida = Ki ʃ e(t)
Donde:
Ki : es una constante llamada ganancia integral.
En la figura 8.5 se muestra lo que se obtiene cuando el error posee una de
escalón. Además, la integral entre 0 y t es, de hecho el área bajo la gráfica del
error entre 0 y t. Así, debido a que después de que error comienza, el área se

79
incrementa en una razón regular, la salida del controlador se debe incrementar a
una razón regular. La salida en cualquier tiempo, es proporcional a la acumulación
de los efectos de los errores pasados.
Figura 8.5 “Gráfica de la Salida de un Controlador Integral”
Al aplicar la Transformada de Laplace a la expresión de salida se obtiene la
siguiente función de transferencia para el controlador integral:
Gc (s) = Ki . s Así, que para un sistema como el mostrado en la figura 8.6 se tiene una función de
transferencia de lazo abierto:
Go(s) = Ki Gp(s) s
Donde: Gp (s) es la función de transferencia de la planta.
Figura 8.6 “Sistema con un Controlador Integral”
0 Error
Tiempo
Salida del
Controlador
Tiempo
Entrada Controlador
Ki / s
Proceso
Gp (s)
+
-
Salida

80
El circuito eléctrico que representa un Control Integral se esquematiza en la figura
8.7, donde al igual que en el controlador proporcional, es necesario incluir un
circuito inversor. De manera que el OPAM_1 es el integrador y el OPAM_2 es el
inversor de la señal de salida del integrador.
Figura 8.7 “Controlador Integral”
De acuerdo a los pasos matemáticos efectuados para encontrar la función de
transferencia de este sistema se concluye que:
Ki = 1 . R1C
Así, el valor de la ganancia integral depende de los valores de R1 y C.
Por otro lado, la ventaja de tener un controlador integral es que la introducción de
un término s en el denominador incrementa el tipo de sistema en 1. De esta
manera, si el sistema hubiera sido de tipo 0, el error en estado estacionario que se
habría presentado con la entrada escalón desaparecería cuando se presentara el
control integral. Sin embargo, una desventaja es que el término s en el
denominador significa que se ha introducido un polo en el origen y dado que no se
han introducido ceros se tendría una diferencia entre el número de polos y ceros
en 1, produciendo que los ángulos de las asíntotas del lugar geométrico de las
raíces decrecen provocando un efecto de apuntalamiento hacia el semiplano
derecho del plano s, provocando una disminución en la estabilidad relativa del
sistema.
R1
OPAM_1 R
R
SALIDA
ERROR
OPAM_2
-
+
-
+
C

81
8.4 CONTROL PROPORCIONAL-INTEGRAL (PI).
Para amortiguar el efecto que da el control integral a la estabilidad se diseña un
control proporciona integral (PI), como el expuesto en la figura 8.8.
Figura 8.8 “Esquemático de un Control Proporcional-Integral”
En el esquema 8.8 se observa que la función de transferencia del compensador en
términos de s ( Gc(s) ) está constituida por dos términos como se indica:
Gc (s) = Kp + Ki s
Realizando las operaciones necesarias se llega a:
Gc(s) = Kp [ s+ Ki/Kp ] s
A Ki/Kp se le denomina: constante de tiempo integral Ƭi, este tiempo regula la
acción de control integral. El recíproco del tiempo integral Ƭi recibe el nombre de
frecuencia de reposición y es la cantidad de veces por minuto en que se repite la
acción proporcional.
Una vez analizada la función del controlador y analizando la figura 8.8, se deduce
que la función de transferencia de trayectoria directa es:
Go(s) = Kp[ s+(1/ Ƭi]Gp(s)
Kp
Ki/s Salida Entrada
Proceso
Gp (s)
+
-
+
+
Controlador Gc (s)

82
s
A través de ésta expresión se observa que un control PI adiciona un cero en – (1/
Ƭi) y un polo en el origen. El polo en el origen (1/s) incrementa el tipo del sistema
en 1 y elimina la posibilidad de un error en estado estacionario para una entrada
escalón. Por otro lado, debido a la introducción de un nuevo polo y un nuevo cero,
la diferencia entre el número de polos y ceros permanece sin cambios.
En el esquema 8.9, se muestra el circuito eléctrico que representa un control PI,
del cual se concluye:
Kp = R2/R1 y Ki = 1/(R1C)
Figura 8.9 “Diagrama eléctrico de un Controlador PI”.
8.5 CONTROL PROPORCIONAL-DERIVATIVO (PD).
La unión de un controlador proporcional con un control derivativo da como
resultado un control proporcional derivativo, mostrado en la figura 8.10.
Kp
Kd s Salida Entrada
Proceso
Gp (s)
+
-
+
+
Controlador Gc (s)
R1
OPAM_1 R
R
SALIDA
ERROR
OPAM_2
-
+
-
+
C
R2

83
Figura 8.10 “Esquemático de un Control Proporcional-Derivativo”
Este control se define por la siguiente ecuación:
u(t) = Kp e(t) + Kp Ƭd de(t) . dt
Y su función de transferencia (del controlador) se expresa como:
U (s) = Kp (1+Ƭd s) E (s)
Donde:
Kp es la ganancia proporcional
Ƭd es una constante denominada tiempo derivativo o tiempo de adelanto
Este tiempo también es conocido como tiempo de razón y es la cantidad de tiempo
durante la cual el controlador “ve adelante” o “ve en el futuro”, de otra manera es
el tiempo en el que la acción derivativa se adelanta al efecto de la acción
proporcional, este efecto se muestra en la gráfica 8.11.
Figura 8.11 “Gráfica que representa una entrada rampa unitaria y la salida del
controlador PD”
e(t)
t 0
Rampa Unitaria
0 t
U(t)
Ƭd
Sólo proporcional
Acción de Control PD

84
En la figura 7.11 se aprecia de manera notable cual es la respuesta que el
controlador PD presenta, observando también de forma gráfica el concepto de
tiempo derivativo.
Haciendo referencia nuevamente a la figura 8.10, se concluye que la función de
transferencia de lazo abierto es:
Go (s) = (Kp + Kd s) Gp (s)
Go (s) = Kd [ (1/Ƭd) + s] Gp (s)
Donde:
Ƭd = Kp / Kd
Por último se muestra en la figura 8.12 el circuito eléctrico que representa un
controlador PD.
Figura 8.12 “Diagrama eléctrico de un Controlador PD”.
8.7 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO (PID).
La combinación de los efectos de la acción proporcional, integral y derivativa, se le
denomina acción de control proporcional-integral-derivativa o PID, conocido
también como controlador de tres términos con un sistema de la forma que ilustra
la figura 8.13.
R1
OPAM_1 R
R
SALIDA ERROR OPAM_2
-
+
-
+
C R2
R3

85
Con un sistema como el ilustrado en la figura 8.13 dará una salida, para una
entrada de error e de la manera siguiente:
Salida = Kp e(t) + Ki ʃ e(t)dt + Kp de(t) dt
La función de transferencia del controlador quedaría como:
Gc(s) = Kp + Ki . + Kd s s
Como la constante de tiempo integral se define como: Ƭi = Kp / Ki y la constante
de tiempo derivativa es: Ƭd = Kd / Kp Gc(s) se puede reestructurar quedando como:
Gc(s) = Kp 1 + Ki . + Kd s Kps Kp
Concluyendo la función de transferencia del controlador sería:
Gc(s) = Kp 1 + 1 . + Ƭd s Ƭis
Retomando nuevamente el esquema 8.13 se obtiene la función de transferencia
de lazo abierto como:
Go(s) = Gc(s) Gp(s) = Kp 1 + 1 . + Ƭd s Gp(s)
Ƭis
Salida Entrada Proceso
Gp (s) -
Controlador Gc (s)
Kp
Kd s
+
+
Ki .
s
+
Derivativo
Integral
Proporcional
+
86
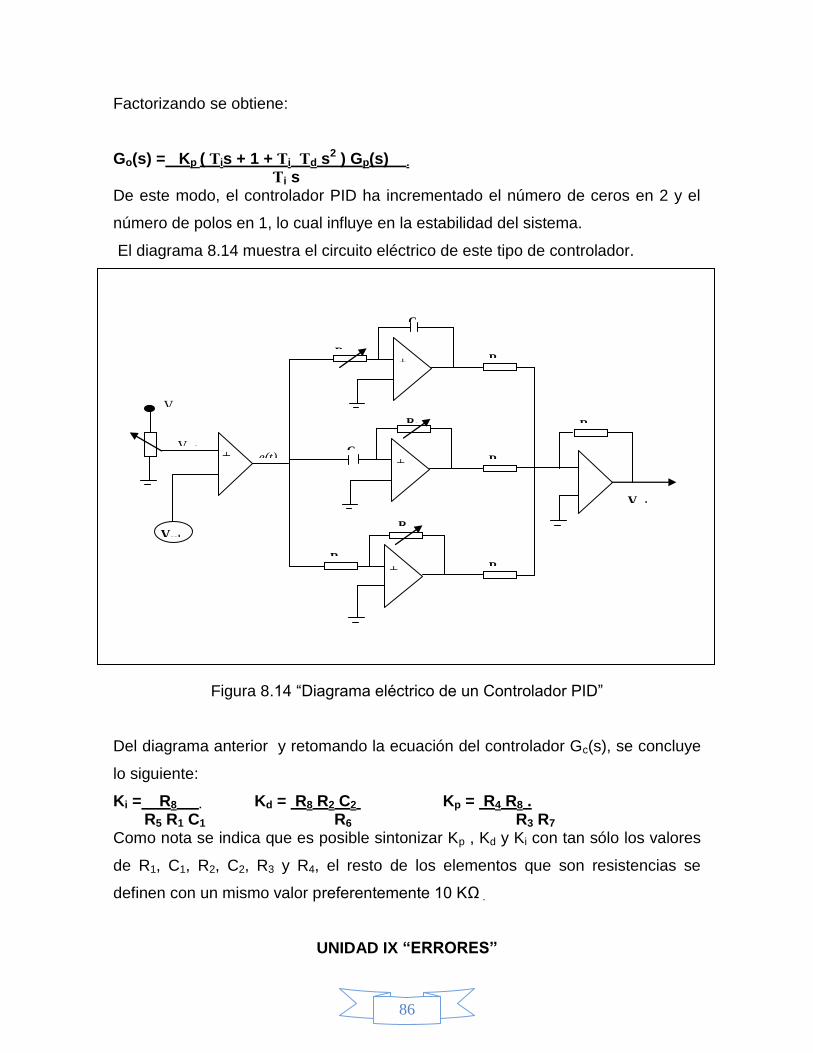
Factorizando se obtiene:
Go(s) = Kp ( Ƭis + 1 + Ƭi Ƭd s2 ) Gp(s) . Ƭi s De este modo, el controlador PID ha incrementado el número de ceros en 2 y el
número de polos en 1, lo cual influye en la estabilidad del sistema.
El diagrama 8.14 muestra el circuito eléctrico de este tipo de controlador.
Figura 8.14 “Diagrama eléctrico de un Controlador PID”
Del diagrama anterior y retomando la ecuación del controlador Gc(s), se concluye
lo siguiente:
Ki = R8 . Kd = R8 R2 C2 Kp = R4 R8 . R5 R1 C1 R6 R3 R7 Como nota se indica que es posible sintonizar Kp , Kd y Ki con tan sólo los valores
de R1, C1, R2, C2, R3 y R4, el resto de los elementos que son resistencias se
definen con un mismo valor preferentemente 10 KΩ .
UNIDAD IX “ERRORES”
Vcc
+
-
Vsal
+
-
R2
C2
+
-
R3
R4
+
-
C1
R1
R6
R7
R8
R5
-
+
Vref e(t)
Vsal

87
INTRODUCCIÓN.
Cuando a un sistema de control se le aplica una señal de entrada, se espera que
después de desvanecerse todos los efectos transitorios, su señal de salida siga de
manera exacta a la señal de entrada en el estado estable. A la diferencia entre la
salida y la entrada en estado estable se define como error en estado estable o
error en estado estacionario. Este error es una medida de la exactitud de un
sistema de control al seguir una entrada y es un error después de que decaen
todas las respuestas transitorias a la entrada. Este error depende del sistema en
estudio y de la forma de la entrada al sistema.
9.1 TIPO EN LOS SISTEMAS DE CONTROL.
Por otro lado, los sistemas de control se pueden clasificar de acuerdo a su
capacidad de seguir entradas escalón, rampa, parabólica, entre otras. Este
esquema de clasificación es congruente ya que las entradas reales se suelen
considerar como combinaciones de aquellas entradas. Los valores de los errores
estacionarios debido a estas entradas individuales son muestras de la bondad del
sistema.
Considérese la función de transferencia de lazo abierto G(s)H(s) siguiente:
G(s)H(s) = K (Tas+1) (Tbs+1) (Tcs+1)… (Tms+1) .
sN(T1s+1) (T2s+1) (T3s+1)… (Tps+1)
Donde:
K: es una constante.
m y n son enteros.
a0 y b0 no pueden ser cero.
q: es un entero, valor que determina el tipo o clase del sistema.

88
Si q=1 entonces el sistema es de tipo 1 o si q=5 el sistema es de tipo 5, y si se
observa con detenimiento la expresión anterior se deduce que el tipo del sistema
se determina por el número de integradores (1/s) que posee la función de
transferencia de lazo abierto.
En la práctica es difícil tener un sistema de tipo 3 o mayor, pues resulta difícil
diseñar sistemas estables con más de dos integradores en el paso directo.
Ejemplo
¿Qué tipo de sistema se tiene en los siguientes casos?
4
s+1θ
i(s) θ
o(s)
+
-
)()(1
)(..
sHsG
sGTF
1
4)(
ssG
Tipo cero, porque no hay un factor integrador
Ejercicio 2
θi(s)
+-
1-s
s
θo(s)
+
-
5
s+2
)552)(2(
)2(5
2
552
2
5
2
551
2
5
..2
2
2
2
2
ssss
ss
ss
sss
s
ss
ssTF
53
5
)552)(2(
)2(5..
22
ss
s
ssss
ssTF

89
53
5)(
2
ss
ssGo
Tipo cero porque no hay ningún factor integrador
Ejercicio 3
1
s2(s2+2s+1)θ
i(s) θ
o(s)
+
-
)12(
1)(
22
ssssGo
Tipo 2 porque tenemos 1/s2 es decir 2 factores integradores
9.2 ERRORES EN ESTADO ESTACIONARIO.
El error en cualquier sistema es la diferencia entre la señal de salida requerida y la
señal de salida real que se presenta. Para un sistema de control en lazo abierto,
como el mostrado en la figura 9.1.
Figura 9.1 “Sistema de Control en lazo abierto”
El error E(s) es:
E(s) = θi (s) – θo (s)
Y puesto que la función de transferencia para el sistema de lazo abierto es:
G(s) = θi (s)
Θi Θo G(s)

90
θo (s)
Obteniendo:
E (s) = θi (s) – G(s) θi (s) = [1- G(s)] θi (s).
Llegando a la conclusión de que el error no sólo depende del sistema, sino de la
forma de la entrada θi (s), como se muestra en la ecuación anterior.
Para un sistema de lazo cerrado como el mostrado en la figura 9.2 el error es:
E(s) = θi (s) – θo (s)
Figura 9.2 “Sistema de Control en lazo cerrado.”
Recordando, la función de transferencia para el sistema de lazo cerrado con
retroalimentación unitaria es:
θi (s) = G(s) . θo (s) 1 + G(s)
Obteniendo el error de la siguiente manera:
E (s) = θi (s) – G(s) θi (s) . = 1 . θi (s) 1 + G(s) 1 + G(s)
Comprobando nuevamente que el error no sólo depende del sistema sino del tipo
de entrada el mismo.
Ahora, si se tiene un sistema de lazo cerrado cuya retroalimentación no es
unitaria, como se observa en la figura 9.3, será necesario hacer una modificación
Θi + Θo G(s)
-

91
al sistema de manera que se tenga un sistema de lazo cerrado con
retroalimentación unitaria, como se ilustra en la figura 9.4.
Figura 9.3 “Sistema de Control en lazo cerrado.”
Figura 9.4 “Conversión a retroalimentación de Sistema de Control en lazo
cerrado.”
Así se logra que la función de transferencia de la trayectoria directa es:
Go = G(s) . 1 + G(s)[H(s)-1]
Por otro lado, aplicando el teorema del valor final para hallar el error en estado
estacionario se llega a:
ess = lim e(t) = lim s E(s) t∞ s0
De manera que para un sistema de lazo abierto se tiene:
ess = lim s[1-G(s)]θi(s) s0
Θi + Θo G(s)
-
H(s)
Θi + Θo G(s)
-
H(s) - 1
-
+

92
Y para un sistema de lazo cerrado:
ess = lim s 1 . θi (s) s0 1 + G(s)
Error en estado estacionario para una entrada escalón o constante Kp de
error estático de posición.
Recordando, el error en estado estacionario para un sistema en lazo cerrado está
dado por:
ess = lim s 1 . θi (s)
s0 1 + Go(s)
Donde: Go(s) es la función de transferencia de lazo abierto. Si se tiene que la
entrada es un escalón unitario se tiene: θi (s) = 1/s, sustituyendo en la ecuación
anterior se obtiene:
ess = lim s 1 . 1 . s0 1 + Go(s) s
ess = lim 1 . s0 1 + Go(s)
Y como se indicó con anterioridad la función de transferencia de lazo abierto es:
K ( sm + am-1sm-1 + am-2s
m-2 + …+ a1s + a0 )
sq ( sn + bn-1sn-1 + bn-2s
n-2 + …+ b1s + b0 )
Se hacen las siguientes apreciaciones:
1.- Si q=0 se tiene un sistema de tipo cero, obteniendo como función de
transferencia de lazo abierto: K a0/b0, representando una constante.
2.- Si q es diferente de cero, la función de transferencia de lazo abierto
toma un valor de infinito, debido a que el tipo es distinto de cero y siempre

93
se obtendrá un cero en el denominador al sustituir en el límite. Y esto
provocará que el error en estado estable vaya disminuyendo.
3.- Es más habitual representar el valor de la función de transferencia en
lazo abierto cuando s0 como un constante Kp a la cual se le denomina
constante de error de posición y queda definida como:
Kp = lim Go(s) s0
Donde si se tiene un sistema de tipo cero, Kp es:
Kp = K a0 / b0
Con lo anterior se concluye que error en estado estacionario para una entrada
escalón es:
ess = 1 . 1 + Kp
Y el error dependerá del tipo del sistema.
Error en estado estacionario para una entrada rampa o constante Kv de error
estático de velocidad.
Retomando nuevamente la expresión del error en estado estacionario, se tiene
que:
ess = lim s 1 . θi (s) s0 1 + Go(s)
Además, considerando que una entrada rampa es: θi (s) = 1/s2, se concluye:
ess = lim s 1 . 1 . s0 1 + Go(s) s2
ess = lim 1 . s0 s (1 + Go(s))

94
Como el límite tiende a cero, se observa que s tiende de igual forma a cero y el
denominador se hace cero. La expresión del error se puede denotar como:
ess = 1 . Kv
Donde, Kv es una constante conocida como constante del error de velocidad y
queda definida por:
Kv = lim sG0(s) s0
Por otro lado, se hacen algunas acotaciones al respecto.
Se tiene que para un sistema de lazo abierto se tiene la siguiente función de
transferencia:
K ( sm + am-1sm-1 + am-2s
m-2 + …+ a1s + a0 )
sq ( sn + bn-1sn-1 + bn-2s
n-2 + …+ b1s + b0 )
Ahora, si se tiene una entrada rampa para un sistema de tipo cero, Kv será
igualmente cero, (del análisis de la expresión de Kv) y error en estado estable será
muy grande, lo cual no es deseable.
Si se tiene un sistema de tipo uno, es decir q=1, Kv tendrá un valor de:
Kv = K a0 / b0
La cual es una constante y el error dependerá de este valor.
Finalmente, si q>1, es decir si se tiene un sistema de un tipo mayor a 1 Kv tendrá
un valor de infinito y error en estado estable tiende a cero.
Error en estado estacionario para una entrada parabólica o constante Ka de
error estático de aceleración.

95
Para determinar este error se considera una entrada parábola unitaria, definida
como:
θi (s) = 1/s3, la cual se sustituye en la expresión del error que se ha estado
manejando en los apartados anteriores, obteniendo:
ess = lim s 1 . 1 . s0 1 + Go(s) s3
ess = lim 1 . s0 s2 (1 + Go(s))
ess = 1 . Ka
Donde Ka, es la constante de error de aceleración y queda definida por:
Ka = lim s2 G0(s) s0
Y realizando los análisis necesarios al igual que para las entradas escalón y
rampa unitaria, se hacen las consiguientes valoraciones:
1.- Se considera:
K ( sm + am-1sm-1 + am-2s
m-2 + …+ a1s + a0 )
sq ( sn + bn-1sn-1 + bn-2s
n-2 + …+ b1s + b0 )
Para un sistema de tipo 0, Ka=0, por tanto el error es muy grande.
2.- Si q=1 Ka sigue teniendo un valor de cero, (por el límite) alcanzando un error
muy grande.
3.- Si el tipo del sistema es q=2, Ka es una constante que depende de a0, b0 y K,
llegando a:

96
Ka = K a0 / b0
Y el error depende del valor de esta constante del error de aceleración.
4.- Finalmente, si q>3 Ka siempre será infinito provocando que el error tienda a
cero.
Con estos análisis se concluye el apartado de errores, donde este error en estado
estacionario es al que llega el sistema una vez pasado el estado de transitorios.
REFERENCIAS
Ogata, “Ingeniería de Control Moderna”, Segunda Edición, Edit. Prentice Hall.
Dorf, “Sistemas de Control Moderno”, 10ª Edición, Edit. Pearson.
Bolton, “Ingeniería de Control”, 2da. Edición, Edit.Alfaomega.
Norman, “Sistemas de Control para Ingeniería”, Tercera Edición, Edit. CECSA.
Kuo, “Sistemas de Control Automático”, Segunda Edición, Edit. Prentice Hall.