UNIDAD II ANÁLISIS CINEMÁTICO DE MECANISMOS PLANOS...MECANISMOS M.C. IGNACIO ARRIOJA CÁRDENAS...
20
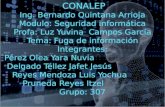
MECANISMOS M.C. IGNACIO ARRIOJA CÁRDENAS Página 1 UNIDAD II ANÁLISIS CINEMÁTICO DE MECANISMOS PLANOS Se estudiará la cinemática de mecanismos articulados tomando como ejemplos en este curso los mecanismos de cuatro eslabones y el de biela, manivela-corredera de cuatro eslabones. Para el análisis de velocidad y aceleraciones, se estudiaran de manera simultánea los métodos analíticos y gráficos. 2.1 ANÁLISIS DE POSICIÓN DE MECANISMOS PLANOS POR MÉTODOS GRÁFICO Y ANALÍTICO. MÉTODO GRÁFICO: Para cualquier eslabonamiento de un grado de libertad, como uno de cuatro barras, solo se necesita un parámetro que defina por completo las posiciones de todos los eslabones. El parámetro que se elige usualmente es el ángulo del eslabón de entrada θ 2 . Se desea determinar los ángulos θ 3 y θ 4 . Las longitudes de todos los eslabones se conocen. El análisis grafico de este problema es trivial. Si se traza a escala el eslabonamiento en una posición particular (dado el ángulo θ 2 ), solo es necesario medir con un transportador los ángulos de los eslabones 3 y 4. Se debe notar que todos los ángulos se miden desde la parte positiva del eje x. La exactitud de esta solución grafica estará limitada por la destreza y el cuidado al dibujar, y por la precisión del transportador de ángulos que se use. Es importante notar que tal solución sólo es válida para la posición particular (valor de θ 2 ) seleccionada. Para cada análisis de posición adicional se debe redibujar por completo el eslabonamiento. Esto puede ser muy laborioso si se necesita un análisis en cada incremento de 1º en θ 2 . Figura 1.1 Mecanismo de cuatro eslabones. MÉTODO ANALÍTICO: La notación polar de la dirección y magnitud de un vector es conveniente cuando se analizan mecanismos en el plano, de manera que: Donde = √− se llama numero complejo o imaginario. En la siguiente figura se puede observar su representación:
Transcript of UNIDAD II ANÁLISIS CINEMÁTICO DE MECANISMOS PLANOS...MECANISMOS M.C. IGNACIO ARRIOJA CÁRDENAS...

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 1
UNIDAD II ANÁLISIS CINEMÁTICO DE MECANISMOS PLANOS
Se estudiará la cinemática de mecanismos articulados tomando como ejemplos en este curso los mecanismos de cuatro eslabones y el de biela, manivela-corredera de cuatro eslabones . Para el análisis de velocidad y aceleraciones, se estudiaran de manera simultánea los métodos analíticos y gráficos.
2.1 ANÁLISIS DE POSICIÓN DE MECANISMOS PLANOS POR M ÉTODOS GRÁFICO Y ANALÍTICO.
MÉTODO GRÁFICO:
Para cualquier eslabonamiento de un grado de libertad, como uno de cuatro barras, solo se necesita un parámetro que defina por completo las posiciones de todos los eslabones. El parámetro que se elige usualmente es el ángulo del eslabón de entrada θ2. Se desea determinar los ángulos θ3
y θ4. Las longitudes de todos los eslabones se conocen. El análisis grafico de este problema es trivial. Si se traza a escala el eslabonamiento en una posición particular (dado el ángulo θ2), solo es necesario medir con un transportador los ángulos de los eslabones 3 y 4. Se debe notar que todos los ángulos se miden desde la parte positiva del eje x. La exactitud de esta solución grafica estará limitada por la destreza y el cuidado al dibujar, y por la precisión del transportador de ángulos que se use. Es importante notar que tal solución sólo es válida para la posición particular (valor de θ2) seleccionada. Para cada análisis de posición adicional se debe redibujar por completo el eslabonamiento. Esto puede ser muy laborioso si se necesita un análisis en cada incremento de 1º en θ2.
Figura 1.1 Mecanismo de cuatro eslabones.
MÉTODO ANALÍTICO:
La notación polar de la dirección y magnitud de un vector es conveniente cuando se analizan mecanismos en el plano, de manera que: Donde � = √−� se llama numero complejo o imaginario. En la siguiente figura se puede observar su representación:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 2
Figura 1.2 Representación de un numero complejo.
Se debe observar que cuando se multiplica a un vector por el número complejo (imaginario) � = √−�, el vector rota 90º en sentido contrario a las manecillas del reloj (sentido positivo).
Una ventaja de utilizar esta notación de números complejos para representar vectores en el plano proviene de la identidad de Euler:
�±�� = ���� ± �����
Mecanismo de cuatro eslabones:
En la figura siguiente los eslabones se trazan como vectores de posición que forman un lazo de vectores. Las longitudes de los eslabones son conocidas. La posición del eslabonamiento particular está definida por el ángulo de entrada θ2, ya que se trata de un mecanismo con un GDL. Se han de determinar los ángulos θ3
y θ4.
Figura 1.3 Lazo de vectores para un eslabonamiento de cuatro eslabones.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 3
Observar que el eje X (real) se toma por conveniencia a lo largo del eslabón 1 y el origen del sistema coordenado global, en el punto O2, principio del vector R2, del eslabón de entrada, lo anterior conduce a la siguiente ecuación de lazo vectorial o polígono de vectores:
R2 + R3 - R4 – R1 = 0
A continuación se introduce la notación de números complejos. Observe que las longitudes de los cuatro eslabones se denotan por a, b, c y d, por lo que la ecuación queda como: Hay cuatro variables en esta ecuación: los cuatro ángulos de los eslabones. Las longitudes son todas constantes, así como el ángulo del eslabón 1 que es cero. El ángulo θ2 es la variable independiente que se controla con un motor u otro dispositivo de impulsión. Se necesitan expresiones algebraicas que definan loa ángulos θ3
y θ4 como funciones de los valores conocidos, esto es: Para resolver la ecuación vectorial de forma polar, se introduce los equivalentes de Euler en cada termino y separar la ecuación resultante en forma cartesiana, en dos ecuaciones escalares que se pueden resolver simultáneamente para evaluar θ3
y θ4. Esto es: Esta ecuación se separa en su parte real e imaginaria.
Parte real (componente x), tomando que θ1 = 0: Parte imaginaria (componente y), tomando que θ1 = 0, el número complejo � = √−�se elimina por division: Las ecuaciones anteriores se pueden resolver reescribirlas con el fin de aislar las dos incógnitas en el lado izquierdo, esto da:
Si se elevan al cuadrado ambos miembros de las ecuaciones anteriores y se suman miembro a miembro, se tiene: Simplificando: El lado derecho debe ser desarrollado y agrupando sus términos, por lo que:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 4
Para simplificar esta expresión se introducen las constantes K1, K2 y K3 en términos de las longitudes conocidas de los eslabones: Por lo queda:
Se introduce la identidad cos( θ2 – θ4)=cos θ2 cos θ4 + sen θ2 sen θ4 y se obtiene la ecuación de Freudenstein : Para reducir la ecuación anterior se introduce la identidad del ángulo mitad: Lo que da la siguiente ecuación cuadrática, de debe observar que se introdujeron las constantes A, B y C: Donde: La solución es:
La ecuación anterior tiene dos soluciones debido a las condiciones del ± del radical. La solución con signo negativo da una configuración abierta y configuración cruzada para el signo positivo. La solución para el ángulo θ3 es esencialmente similar a la de θ4, esto es:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 5
Así: Se introdujeron las constantes K4 y K5, por lo que estas son: Y se tiene la forma cuadrática: Donde: Y la solución es: Como al caso anterior, hay dos soluciones que corresponden a la configuración cruzada y abierta como se muestra en la figura.
Figura 1.4 Configuraciones abierta y cerrada.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 6
Mecanismo de cuatro eslabones de manivela, biela-cor redera:
El mismo enfoque se da a este tipo de mecanismos, la figura ilustra el mecanismo con un corrimiento:
Figura 1.5 Mecanismo de cuatro eslabones de manivel a, biela corredera
El termino corrimiento indica que el eje de la corredera prolongado no pasa por el pivote de la manivela, este es el caso general de este tipo de mecanismos. Esta cadena con corrimiento puede representarse por solo tres vectores R2, R3 y RS, pero uno de ellos (RS) será un vector de magnitud y dirección variables. Es conveniente usar cuatro vectores R1, R2, R3 y R4 con R1 dispuesto paralelamente al eje de deslizamiento y R4 perpendicular a él. Estos dos vectores son componentes ortogonales del vector RS. Este acomodo conduce a una ecuación de polígono vectorial semejante al eslabonamiento de cuatro eslabones con juntas de pasador:
R2 - R3 - R4 – R1 = 0
Sustituyendo las longitudes como a, b, c y d,y su equivalencia de números complejos, se tiene:
Se introducen los equivalentes de Euler: Se separa la parte real y la imaginaria:
Parte real (componente x), tomando que θ1 = 0: Parte imaginaria (componente y), tomando que θ1 = 0, el número complejo � = √−�se elimina por division: Resolviendo estas dos ecuaciones como el caso anterior, se tiene:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 7
Se debe observar que hay dos soluciones. La función arco seno esta multivariada y su determinación dará un valor entre ±90º, y ello representa sólo una rama del eslabonamiento. El valor de d depende del valor de θ3. Dicho valor para la segunda rama del eslabonamiento se obtiene por: PROBLEMA 1: Las longitudes de los eslabones y el valor de θ2 para un mecanismo de cuatro eslabones se dan en la tabla siguiente, la configuración se da en la figura, trace el eslabonamiento a escala, obtenga gráficamente y analíticamente todas las soluciones posibles (tanto abiertas como cruzadas) para los ángulos θ3 y θ4. Determine la condición de Grashof.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 8
Solución: a.-) Trazando a escala se puede medir: La condición de Grashof es:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 9
2.2. ANÁLISIS DE VELOCIDAD DE MECANISMOS PLANOS POR MÉTODOS GRÁFICO Y ANALÍTICO.
MÉTODO ANALÍTICO: Se usaran los números complejos para encontrar las velocidades de todos los eslabones y de las uniones del mecanismo.
Mecanismo de cuatro eslabones:
Para el análisis de velocidades se procede de la misma forma que para las posiciones, ahora se conoce la velocidad angular de entrada en el eslabón dos ω2, esta puede ser una velocidad variable en el tiempo, la ecuación de lazo vectorial es:
R2 + R3 - R4 - R1 = 0
Figura 1.6 Lazo de vectores para un eslabonamiento de cuatro eslabones.
La notación en números complejos es: Derivando con respecto al tiempo: Recordando que: Por lo que:
Se debe notar que la última expresión es la de velocidades relativas o de diferencia de velocidad:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 10
Donde:
Se necesitan expresiones para determinar las velocidades angulares ω3 y ω4 en función de la velocidad de entrada ω2, las longitudes y todos los ángulos de eslabón. Esto es: La estrategia de solución será la misma que en las posiciones, introduciendo la identidad de Euler:
Multiplicando por � = √−� cada miembro: Los términos de cosenos se han convertido en los términos imaginarios o en la dirección y, y como �� = −�, los términos de seno son los reales o en la dirección x: Separando en la parte real e imaginaria: Parte real (componente x):
Parte imaginaria (componente y):
Estas ecuaciones de resuelven simultáneamente por sustitución directa y se tiene: Se determinan las velocidades lineales aplicando la identidad de Euler: En donde los términos reales e imaginarios son las componentes x y y, respectivamente. Se debe notar que hay dos soluciones correspondientes a la rama abierta y cruzada del mecanismo y se obtiene por introducción de los valores de θ3 y θ4, según se requiera.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 11
Mecanismo de cuatro eslabones de manivela, biela-cor redera:
Este mecanismo de muestra en la figura siguiente, la ecuación de lazo vectorial es:
Figura 1.7 Mecanismo de cuatro eslabones de manivel a, biela-corredera
R2 - R3 - R4 – R1 = 0
Sustituyendo las longitudes como a, b, c y d, y su equivalencia de números complejos, se tiene:
Derivando con respecto al tiempo: El término �� es la velocidad lineal de la corredera y se puede escribir como:
Introduciendo la identidad de Euler:
Simplificando: Parte real (componente x):
Parte imaginaria (componente y):
Resolviendo las dos ecuaciones simultáneamente:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 12
Para la velocidad del punto A y la relativa de A respecto de B se tiene: PROBLEMA 2: Las longitudes de los eslabones y el valor de θ2 y ω2 para un mecanismo de manivela, biela-corredera se dan en la tabla siguiente, la configuración se da en la figura, trace el eslabonamiento a escala tanto cruzada y abierta, obtenga analíticamente las velocidades de las juntas de pasador A y B y la velocidad de deslizamiento en la junta deslizante (corredera).
Solución: a.-) Trazando a escala se puede medir:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 13
Las velocidades anteriores son las velocidades de deslizamiento de la corredera.
2.3 ANÁLISIS DE ACELERACIÓN DE MECANISMOS PLANOS PO R MÉTODOS GRÁFICO Y ANALÍTICO.
MÉTODO ANALÍTICO: Se usaran los números complejos para encontrar las aceleraciones de todos los eslabones del mecanismo.
Mecanismo de cuatro eslabones:
Para el análisis de aceleración se procede de la misma forma que para las posiciones, ahora se conoce la aceleración angular de entrada en el eslabón dos α2, esta puede ser una aceleración variable en el tiempo, la ecuación de lazo vectorial es:
R2 + R3 - R4 – R1 = 0
Figura 1.8 Lazo de vectores para un eslabonamiento de cuatro eslabones.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 14
Como antes, se introduce la notación de números complejos:
Para el análisis de velocidades se derivó con respecto al tiempo y se obtuvo:
Derivando nuevamente respecto del tiempo: Simplificando y agrupando términos: Como se puede ver, se tienen las expresiones para las aceleraciones relativas:
Donde: Ahora se necesitan resolver la última ecuación simplificada para α3 y α4, conociendo α2, todas las longitudes, todos los ángulos y las velocidades angulares, esto es: Se introduce la identidad de Euler:
Se multiplica por el operador � = √−� y se reordena: Separando la parte real y la imaginaria, se tiene:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 15
Parte real (componente x): Parte imaginaria (componente y):
Resolviendo las dos ecuaciones simultáneamente: Donde: Para las aceleraciones lineales, se tiene: Mecanismo de cuatro eslabones de manivela, biela-cor redera:
Este mecanismo de muestra en la figura siguiente, la ecuación de lazo vectorial es:
Figura 1.9 Mecanismo de cuatro eslabones de manivel a, biela-corredera

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 16
R2 - R3 - R4 – R1 = 0
Sustituyendo las longitudes como a, b, c y d, y su equivalencia de números complejos, se tiene:
Derivando con respecto al tiempo: Volviendo a derivar con respecto al tiempo:
Simplificando:
Debe notarse que las aceleraciones relativas están dadas por:
Debe notarse que el eslabón cuatro está en traslación pura y por lo tanto v4 y a4 valen cero. La aceleración del eslabón 4 tiene sólo una componente tangencial a lo largo de su trayectoria. Las dos incógnitas son α3 y la aceleración lineal del eslabón 4 que se denota por �� , introduciendo la identidad de Euler: Separando la parte real y la imaginaria, se tiene:
Parte real (componente x): Parte imaginaria (componente y):
Resolviendo las dos ecuaciones simultáneamente:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 17
PROBLEMA 3:
Las longitudes de los eslabones y el valor de θ2, ω2 y α2 para un mecanismo de cuatro eslabones se dan en la tabla siguiente, la configuración se da en la figura, trace el eslabonamiento a escala, obtenga analíticamente las aceleraciones de los puntos A y B. Luego calcule α3 y α4, así como la aceleración del punto P. Solución: a.-) Trazando a escala se puede medir: Usando las ecuaciones:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 18
Para el punto B, se tiene:
Para el punto P, se tiene:

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 19
2.4 TEOREMA DE KENNEDY.
La definición de un centro instantáneo (CI) de velocidad es un punto, común a dos cuerpos en movimiento plano, cuyo punto tiene la misma velocidad instantánea en cada cuerpo. Los centros instantáneos, algunas veces se denominan centros o polos. La formula para determinar el número de centros instantáneos C de un mecanismo con n eslabones es:
� =�(� − 1)
2
En la siguiente figura se muestra un mecanismo de cuatro eslabones junto con un grafo lineal el cual es útil para no perder de vista cuales CI han sido encontrados. Este grafo se crea al dibujar un circulo en el cual se marcan tantos puntos como eslabones haya. Luego se traza una línea ente los puntos que representan los pares de eslabones cada vez que se halla un CI. El grafo lineal resultante es el conjunto de líneas que unen los puntos. En general. Los CI se moverán a nuevas localizaciones cada vez que el mecanismos cambie de ubicación; de ahí proviene el adjetivo instantáneo. En esta figura hay otros dos CI que deben ser localizados. Ayudará a ello utilizar el teorema de Kennedy , también denominado Regla de Kennedy , para su localización. Este teorema dice: “Cualesquiera tres cuerpos en movimiento plano tendrán exactamente tres centros instantáneos, y éstos se encontraran en la misma línea recta”.

MECANISMOS
M.C. IGNACIO ARRIOJA CÁRDENAS Página 20
Una vez encontrados los CI, se pueden usar para calcular la velocidad de cada eslabón mediante la figura: Recordando de la dinámica que:
�� =�
���,�
� = (���,�)��
�� =�
��0��
� = (���,�)��
2.5 ANÁLISIS DE POSICIÓN, VELOCIDAD Y ACELERACIÓN P OR MEDIO DE SOFTWARE.
En este tema se usa durante el desarrollo de la unidad el software libre “Working Model 2005” del libro: Diseño de Maquinaria, Robert L. Norton, 3ª Edición.