
Universidad de Monterrey División de Ciencias de la...
50
Universidad de Monterrey División de Ciencias de la Salud “Sistema de Análisis de Movimiento para Detección Temprana de Riesgo de Parálisis Cerebral en Lactantes Menores” Programa de Evaluación Final que presenta: Alonso Cárdenas de la Parra En Opción al Título de: Ingeniero Biomédico Asesores: M en C. Ivett Quiñones Urióstegui M en C. Alberto Isaac Pérez Sanpablo San Pedro Garza García, N.L., Diciembre 2013
Transcript of Universidad de Monterrey División de Ciencias de la...

Universidad de Monterrey
División de Ciencias de la Salud
“Sistema de Análisis de Movimiento para Detección Temprana de Riesgo
de Parálisis Cerebral en Lactantes Menores”
Programa de Evaluación Final que presenta:
Alonso Cárdenas de la Parra
En Opción al Título de:
Ingeniero Biomédico
Asesores:
M en C. Ivett Quiñones Urióstegui
M en C. Alberto Isaac Pérez Sanpablo
San Pedro Garza García, N.L., Diciembre 2013

1
Dedicatoria A mis padres, quienes a través de mi vida han sido un apoyo incondicional que me ha permitido
llegar a donde me encuentro, ya que la educación que me impartieron y las exigencias que me
impusieron han forjado mi carácter y han impulsado mi ambición por mejorar constantemente.
A Dios, que me ha permitido aprovechar tantas oportunidades que se me han presentado y que a
través de mi vida me ha rodeado de las mejores personas posibles para mi desarrollo personal.

2
Agradecimientos
Agradezco especialmente a mi asesora, la Ing. Ivett Quiñones Urióstegui, quien hizo posible la
realización del proyecto. De igual manera agradezco al personal del laboratorio de análisis de
movimiento del Instituto Nacional de Rehabilitación, que durante la duración del proyecto
ofrecieron su apoyo incondicional.
A todos mis sinodales y profesores de la UDEM, en particular al Ing. Jorge Takenaga
Fukushima, el Dr. Santiago Cruz Bañuelos, el Dr. Enrique Peña Muñoz, el Dr. Héctor González
Flores y el Ing. Alonso Sosa Avendaño, quienes de alguna forma dejaron una huella en mí, la
cual se ve reflejada en este proyecto.

3
Índice
Resumen .......................................................................................................................................... 7
Introducción .................................................................................................................................... 8
I. Planteamiento del Proyecto..................................................................................................... 9
Objetivos ................................................................................................................................... 10
II. Marco Teórico ....................................................................................................................... 11
Método de Prechtl ..................................................................................................................... 11
Movimientos serpenteantes ................................................................................................... 11
Movimientos enredadores ..................................................................................................... 13
Comparación con Amiel-Tison ............................................................................................. 13
Análisis de Movimiento ............................................................................................................ 14
Sistemas de cámaras ............................................................................................................. 14
Acelerómetros ....................................................................................................................... 15
Unidades de medición inercial .............................................................................................. 16
Plataformas de Fuerza ........................................................................................................... 16
Antecedentes de uso en lactantes menores ........................................................................... 16
Características de los sujetos de estudio ................................................................................... 17
III. Metodología .......................................................................................................................... 19
Diseño ....................................................................................................................................... 19
Requerimientos Técnicos .......................................................................................................... 19
Selección Tecnológica .............................................................................................................. 20
Adquisición de señales ............................................................................................................. 21
Protocolo de instrumentación ................................................................................................... 21
Software .................................................................................................................................... 23
Variables a Calcular .................................................................................................................. 26

4
Pruebas ...................................................................................................................................... 29
Pruebas preliminares ............................................................................................................. 29
Prueba técnica ....................................................................................................................... 29
Pruebas con lactantes menores.............................................................................................. 30
IV. Resultados ............................................................................................................................. 32
Pruebas Preliminares ................................................................................................................. 32
Prueba técnica ........................................................................................................................... 32
Prueba con lactante menor ........................................................................................................ 34
V. Conclusiones, recomendaciones y trabajo futuro ................................................................. 37
Discusión y Conclusiones ......................................................................................................... 37
Recomendaciones ..................................................................................................................... 39
Trabajo futuro ........................................................................................................................... 39
Bibliografía ................................................................................................................................... 41
Apéndices ...................................................................................................................................... 43
Apéndice A: Glosario de Siglas ................................................................................................ 43
Anexos .......................................................................................................................................... 44
Anexo A: Carta de Consentimiento .......................................................................................... 44
5
Índice de figuras
Fig. 1 Tipos de GM y la edad en la que se presentan.. ................................................................. 12
Fig. 2 Área de mediciones, incluyendo la posición de la cámara. Se puede observar la colocación
de la plataforma al ras de la tarima. .............................................................................................. 22
Fig. 3 Interfaz de usuario del software. ......................................................................................... 23
Fig. 4 Cuadro de diálogo para el procesamiento. .......................................................................... 25
Fig. 5 Vara de madera con los MTx utilizada para realizar un movimiento pendular en la prueba
técnica. .......................................................................................................................................... 30
Fig. 6 Comparación entre la aceleración calculada por el modelo y la medida por los sensores . 33
Fig. 7 Comparación entre las velocidades calculadas por el modelo y las calculadas a partir de
los sensores ................................................................................................................................... 34
Fig. 8 Sujeto 1 durante la prueba. ................................................................................................. 35
Fig. 9 Sujeto 2 durante la prueba. Se muestra que el sujeto tuvo que ser calmado durante la
medición. ....................................................................................................................................... 35
Fig. 10 Sujeto 3 durante la prueba. ............................................................................................... 36

6
Índice de tablas
Tabla 1 Características físicas y de movimiento del recién nacido y lactante menor ................... 18
Tabla 2 Relación entre las características subjetivas de los movimientos generales y las variables
a calcular ....................................................................................................................................... 26
7
Resumen
La Parálisis Cerebral es una alteración frecuente en el desarrollo neurológico de los infantes que,
al ser diagnosticada en etapas tempranas permite la intervención oportuna, mejorando el
posterior desarrollo del individuo. Actualmente una de las mejores herramientas de diagnóstico
temprano es el método de Prechtl, basado en la observación de los Movimientos Generales, sin
embargo es una evaluación subjetiva y en México son pocos los médicos certificados para
aplicarlo.
Mediante el desarrollo de un sistema de análisis de movimiento, es posible obtener datos
cuantitativos que describan los movimientos del lactante menor de acuerdo a las características
subjetivas que se utilizan en el método de Prechtl para evaluar los Movimientos Generales. De
esta manera el sistema puede ser entrenado para mejorar las posibilidades de detección temprana
del riesgo de Parálisis Cerebral.
El objetivo de este proyecto es diseñar un sistema con dichas características, realizando a su vez
una validación técnica del mismo y diseñando un protocolo de medición que permita una
validación clínica posterior, con miras al desarrollo de un equipo de costo accesible que pueda
ser utilizado en hospitales.

8
Introducción
El desarrollo neurológico de los infantes es un tema complejo que se ve influenciado por factores
fisiológicos, ambientales y socioeconómicos. La predicción temprana de alteraciones
neurológicas de recién nacidos y niños es importante para proporcionar atención oportuna y
prevenir complicaciones posteriores que pueden impactar fuertemente en diferentes aspectos de
su calidad de vida [1], [2].
Uno de las alteraciones más frecuentes en el desarrollo neurológico del infante es la parálisis
cerebral (PC). La PC es un problema de limitación funcional del cerebro, no progresivo, que se
adquiere en los periodos prenatal, perinatal y posnatal [3]. La PC es la causa más frecuente de
discapacidad en niños, pues mundialmente uno de cada 400 niños nacidos vivos se ve afectado
por PC [4].
Los síntomas clínicos de PC incluyen disfunciones en el tono, fuerza, coordinación muscular, y
puede acompañarse de trastornos asociados a la capacidad mental, entre otros [2]. El grado de
afectación de cada niño es muy variable y las dificultades experimentadas por el individuo
pueden ser desde imperceptibles hasta muy ostentosas [1], [3], [5]. Hoy en día se cuenta con los
avances en las técnicas de imagen, pero estas son insuficientes por si mismas para explicar o
predecir completamente la función cerebral [6].
La capacidad de identificar daño neurológico del recién nacido y su riesgo de sufrir PC,
proporciona un margen de tiempo importante que permite la estimulación e intervención
tempranas en el infante, mejorando las posibilidades de limitar las disfunciones y trastornos
causados por la enfermedad y, por lo tanto, impactar en la calidad de vida a futuro del
individuo [7].
Este proyecto busca diseñar un sistema y una metodología que puedan ser utilizados para realizar
mediciones en lactantes menores, de manera que permitan la detección temprana de riesgo de
PC, de manera que en un futuro puedan ser utilizadas en centros de salud como ayuda en el
diagnóstico temprano de PC.

9
I. Planteamiento del Proyecto
Actualmente el diagnóstico de PC se basa en la valoración clínica que proporciona información
sobre un posible riesgo, con base en observación visual del médico de los movimientos
espontáneos del lactante menor (edad entre 28 días y 12 meses), pero el diagnóstico definitivo se
obtiene a los cuatro años de vida, cuando el lactante menor manifiesta retraso en su desarrollo,
perdiendo así la posibilidad de proporcionar intervención o estimulación temprana, lo que
aumenta la frustración de los padres y el costo del tratamiento [4], [5], [8]. Dentro de los
movimientos observados por el médico se incluyen a los Movimientos Generales (GM, por sus
siglas en inglés) descritos por Prechtl [9].
La apreciación de los GM requiere una actitud contemplativa por parte del examinador y cierto
entrenamiento especializado [9]. Este método es confiable y capaz de predecir el desarrollo
posterior de PC, sin embargo, para alcanzar mejores niveles de precisión en el pronóstico es
necesario tomar cursos certificados para obtener una exactitud del 88%, y es necesario hacer una
recalibración del sujeto observador (viendo videos de niños sanos), pero no deja de ser un
método subjetivo, sujeto a la experiencia y estado anímico del médico que lo realiza [6], [9],
[10].
El método de valoración de GM permite intervenir mucho tiempo antes de que las características
patológicas de la PC surjan, sin embargo, en México existe poco o nulo personal certificado para
la valoración de GM, llegando incluso a casos en que los retrasos en el desarrollo se manifiestan
incluso en edad escolar, pensando que el niño es flojo o desinteresado, se puede ver que muchos
de esos niños tuvieron daño al nacer pero no se dio la intervención apropiada para su desarrollo
[2], [6]. Con estos antecedentes de importancia, el desarrollo de un sistema que permita
evaluarlos objetivamente puede tener un impacto muy grande en la detección, estimulación y
rehabilitación de niños con daño neurológico susceptibles de sufrir PC, particularmente al
permitir una intervención temprana [7].
Uno de los métodos que pueden ser utilizados para la detección de los GM es el análisis de
movimiento, el cual es un método capaz detectar medidas biomecánicas, seleccionados con base
en parámetros utilizados por los clínicos, dejando de lado impresiones subjetivas del examinador.

10
Sin embargo, aplicar técnicas de análisis de movimiento en recién nacidos es una tarea muy
difícil debido a que los sistemas desarrollados tienen que ser capaces de detectar una gran gama
de movimientos en un espacio reducido y sin ser obstructivos, deben ser ligeros y pequeños
debido a las dimensiones y fuerza del niño, pero sobre todo no deben modificar los movimientos
del niño, de formas que modifiquen la respuesta natural o que activen algún reflejo que se
confunda con los movimientos a medir [9], [10]. Si se adhiere algo en la piel, debe ser inocuo, de
tal manera que no produzca rozaduras, abrasiones, cortaduras, o calor excesivo si es electrónico.
Por otro lado, aunque los GM se pueden presentar por 3 a 5 min, los niños deben muestrearse por
horas ya que no se puede predecir en qué momento se presentarán, de tal suerte que el sistema de
análisis de movimiento debe ser capaz de almacenar grandes cantidades de información y poder
seleccionar la información útil. Por último, no deben estorbar la actividad del niño (comer,
cambios de pañal, etc.) para no modificar el ciclo normal de sueño –vigilia [10].
Por lo tanto, se busca caracterizar los GM de manera que se puedan relacionar los parámetros
clínicos con parámetros medibles usando diferentes técnicas, y con base en dichos parámetros
desarrollar los protocolos y el sistema necesarios para la detección de los GM, incluyendo el
software o hardware que fuera requerido para este fin.
Objetivos
El objetivo general del proyecto consiste en:
I. Desarrollar un sistema de captura y procesamiento de movimientos en lactantes menores.
Y cuenta con los siguientes objetivos específicos:
1. Desarrollar una aplicación que permita sincronizar y obtener los datos de aceleración, velocidad angular, centro de presiones, video y frecuencia respiratoria y/o cardiaca.
2. Procesar los datos calculando variables de interés de acuerdo al método de Prechtl para determinar movimientos anormales de riesgo neurológico.
3. Realizar pruebas de validación técnicas del equipo.
4. Realizar pruebas en lactantes menores.

11
II. Marco Teórico
Método de Prechtl
El método de Prechtl valora los GM, que constituyen el “paisaje de fondo” de la actividad
motora espontánea del lactante menor. Los GM son un conjunto de movimientos de cabeza
tronco y extremidades complejos, fluidos, espontáneos, prominentes, frecuentes y con la
duración suficiente para ser observados desde la edad fetal hasta el cuarto mes post término [10].
Tienen su origen en generadores de movimiento troncoencefálicos y talamoestriados que reciben
modulación desde el telencéfalo. La calidad de su ejecución constituye el indicador del estado
neurológico del neonato y del lactante menor. Si existe daño en el sistema nervioso, los GM
pierden sus características y adoptan patrones patológicos [9], [10].
Durante las primeras 60 semanas de vida el infante presenta y sustituye movimientos para lograr
un neurodesarrollo completo. Estos movimientos de acuerdo a sus características son nombrados
como: movimientos serpenteantes (WM, por sus siglas en inglés) que aparecen durante las
primeras 5 semanas para dar paso después a los movimientos enredadores (FM, por sus siglas en
inglés) que permanecen hasta la semana 20, ya que a partir de la semana 15 el infante comienza a
presentar movimientos voluntarios y antigravedad [9], [10].
El método de Prechtl asocia un alto grado de riesgo de PC a la presencia de movimientos
espasmódicos sincrónicos (CS, por sus siglas en inglés) durante la etapa de los WM y a la
ausencia de F [10]. Las etapas de cada tipo de movimiento, así como la forma de calificarlos se
aprecia en la Fig. 1.
Movimientos serpenteantes
Los WM se presentan durante los primeros dos meses posteriores al parto, aunque a partir de la
semana seis comienzan a desaparecer gradualmente, dando paso a los FM [9]. Clínicamente son
descritos como movimientos de pequeña a mediana amplitud con una velocidad baja a media,
típicamente siguiendo formas elipsoides [10].

12
FIG. 1 SE MUESTRAN LOS TIPOS DE GM Y LA EDAD EN LA QUE SE PRESENTAN. EN LOS RECUADROS ENCONTRAMOS LOS
CRITERIOS DE CALIFICACIÓN DE LOS MISMOS DE ACUERDO AL MÉTODO DE PRECHTL. CS INDICA MOVIMIENTOS
ESPASMÓDICOS SINCRÓNICOS[10].
En la aplicación del método de Prechtl, los WM son calificados como normales, pobres o CS
[10]. Se califican como pobres cuando los movimientos tienden a ser monótonos y poco
complejos, sin embargo, la presencia de WM pobres ha probado tener un valor predictivo de PC
muy bajo, pues un lactante menor que los presenta puede continuar un desarrollo neurológico
normal [11]. Es por esto que en esta etapa los movimientos de interés para el diagnóstico de PC
son los CS.
Los movimientos CS son movimientos rígidos, que no cuentan con la suavidad y fluidez normal
de los WM, además de presentarse movimientos fuertes y simultáneos en el tronco y las
extremidades [10]. Los movimientos CS han probado un muy alto valor de predicción en el
desarrollo de PC en infantes [12].

13
Movimientos enredadores
Los FM comienzan a presentarse con la gradual desaparición de los WM, entre las seis y nueve
semanas, y permanecen hasta las veinte semanas, cuando comienzan a ser cambiados por los
movimientos conscientes y anti gravedad. Son movimientos pequeños, con una velocidad
moderada y aceleración variable en todas las extremidades y que se encuentran presentes en los
estados normales de vigilia del lactante menor, exceptuando los momentos donde hay llanto [9],
[10].
Los FM son calificados en el método de Prechtl como presentes o ausentes. Dicha clasificación
puede ser más específica al incluir la clasificación de presentes normales y presentes anormales,
sin embargo, en la capacidad de predicción de PC dicha clasificación no tiene un valor predictivo
de utilidad, mientras que la ausencia de los FM es uno de los mejores predictores de la presencia
de PC [11], [13]
Comparación con Amiel-Tison
Una evaluación de desarrollo neurológico alternativa al método de Prechtl es la Valoración
Neurológica de Amiel-Tison, la cual consiste en observar el tono muscular pasivo y activo del
lactante menor ante una serie de movimientos realizados por el terapista ocupacional. En dicha
valoración, el terapista ocupacional realiza una serie de movimientos con las extremidades del
lactante menor, de manera que pueda observar los rangos de movimiento de las extremidades y
sentir la resistencia a los mismos, además, se realiza la valoración de diferentes reflejos
tendinosos y musculares del lactante menor, concentrándose siempre en el tono muscular [14],
[15]. Al finalizar la prueba se valora al lactante menor como óptimo, leve, moderado o
severo [14].
Aunque la valoración Amiel-Tison ha demostrado buena predictibilidad en el desarrollo
neurológico posterior de los lactantes menores, no presenta una correlación clara con algún
padecimiento específico y sus resultados pueden variar rápidamente entre valoraciones, además
de presentar falsos positivos en algunos casos [15].

14
Debido a la buena predicción de riesgo de PC que ha demostrado el método de Prechtl y a que no
requiere la interacción de un terapista ocupacional con el lactante menor, se cree que es una
mejor opción para llevar a cabo el presente proyecto [10].
Análisis de Movimiento
El análisis de movimiento es un método capaz detectar parámetros esenciales, seleccionados con
base en parámetros utilizados por los clínicos, dejando de lado impresiones subjetivas del
examinador, sin embargo, aplicarlo en niños recién nacidos es difícil debido a que los sistemas
desarrollados tienen que ser capaces de detectar una gran gama de movimientos en un espacio
reducido, sin limitar o entorpecer el movimiento y sin estimular o molestar al sujeto bajo
estudio [8].
Existen diferentes tecnologías de análisis de movimiento que proveen información útil, sin
embargo, cada una presenta a su vez ciertas limitaciones. Entre las tecnologías disponibles se
encuentran los sistemas de cámaras, con o sin marcadores, los acelerómetros, las unidades de
medición inercial (IMU, por sus siglas en inglés), las plataformas de fuerza y los sistemas
electromagnéticos de posición.
Sistemas de cámaras
Actualmente existen dos tipos principales de sistemas de cámaras para análisis de movimiento,
aquellos que utilizan marcadores y aquellos que no utilizan marcadores. En el caso de los que
utilizan marcadores, su funcionamiento se basa en colocar un arreglo de varias cámaras que
permitan observar al paciente desde diferentes ángulos. Previamente se colocan marcadores en
puntos anatómicos estratégicos del paciente. Los marcadores son utilizados para poder ubicar
puntos de interés en el video obtenido y de esta forma poder calcular la cinemática del
cuerpo [16].
La imagen adquirida por una sola cámara consiste en la representación bidimensional de un
espacio tridimensional, por lo que es necesario realizar una transformación matemática que

15
permita relacionar las coordenadas bidimensionales de la imagen con las coordenadas
tridimensionales del espacio, un ejemplo de ello es la transformación lineal directa, en la cual se
requieren 6 puntos para poder calibrar el sistema y obtener las constantes necesarias para
relacionar las coordenadas bidimensionales con las tridimensionales[16].
El uso de varias cámaras es necesario para obtener una posición más certera de los marcadores,
ya que se obtiene un punto donde coinciden los vectores de posición de varias cámaras, además,
el uso de un mayor número de cámaras disminuye la probabilidad de que ocurra la oclusión
completa de marcadores, en cuyo caso la información de posición del marcador se pierde [16].
Es importante mencionar que dentro de los sistemas que utilizan marcadores, dichos marcadores
pueden ser pasivos (puntos de alto contraste) o activos (que permiten la identificación
automáticas de cada marcador particular) y las cámaras pueden ser infrarrojas o de alta
definición [16].
En cuanto a los sistemas que no utilizan marcadores, su funcionamiento se basa en el uso de una
cámara de profundidad en conjunto con una cámara de alta definición, que aunado a un
algoritmo de esqueletización avanzado permite identificar los miembros particulares de la
persona y seguir sus movimientos. Sin embargo, no existen algoritmos de esqueletización
avanzados de licencia abierta para lactantes menores [17].
Acelerómetros
Los acelerómetros son dispositivos que miden las aceleraciones aplicadas en un eje en particular.
En la actualidad existen acelerómetros que permiten obtener las aceleraciones en tres
dimensiones y que, gracias al desarrollo de tecnología como los sistemas micro electromecánicos
(MEMS, por sus siglas en inglés), son de un tamaño pequeño y tienen un consumo de energía
muy bajo [18].
Estas características permiten que los acelerómetros sean colocados sin problema en el cuerpo
humano, así como realizar mediciones de larga duración en tiempo real [18].Sin embargo, los
acelerómetros sólo proveen información que describe los movimientos y obtener la posición
basado sólo en la aceleración puede llevar a un alto grado de error [4].
16
Unidades de medición inercial
Las IMU son sistemas que combinan acelerómetros y giroscopios para obtener información
acerca de la aceleración y velocidad de giro de un cuerpo, incluyendo también en algunos casos
información del campo magnético. Esta es una tecnología que se encuentra en constante
desarrollo y tiene suficiente calidad y confiabilidad. Los IMU son baratos y lo suficientemente
pequeños para utilizarse en valoraciones portables.
Los IMU ya tienen aplicación exitosa en el análisis de movimiento humano tridimensional [19].
A través del uso de modelos biomecánicos adecuados es posible obtener de los datos de estos
sistemas información sobre la goniometría articular (ángulos de las extremidades del cuerpo),
velocidad y aceleraciones de los segmentos corporales, además de la posición relativa de cada
unidad, por lo que con un modelo biomecánico adecuado se puede obtener información de la
cinemática del cuerpo.
Plataformas de Fuerza
Las plataformas de fuerza consisten en una plataforma con sensores de carga en sus esquinas que
permiten medir tanto la fuerza aplicada como los momentos en cada uno de los 3 ejes. Existen
plataformas más sencillas que solo miden las fuerzas y no los momentos. Basado en la
información obtenida, se pueden calcular las coordenadas donde se encuentra el centro de
presiones (COP) a través del tiempo y, por lo tanto, conocer la forma en la que oscila el cuerpo
colocado sobre la plataforma. Típicamente las plataformas de fuerza son utilizadas en estudio de
posturografía [20].
Antecedentes de uso en lactantes menores
Diferentes estudios han demostrado la utilidad de estos sistemas en la evaluación cuantitativa de
los movimientos de los lactantes menores. Estudios han encontrado diferencias en la
coordinación intra-miembros y entre-miembros de los pies durante el pataleo instantáneo de

17
recién nacidos de término y pre-término utilizando análisis de movimiento bidimensional con
dos cámaras infrarrojas, así como diferencias en el comportamiento postural de los lactantes
menores pre-término mediante el cálculo de variables a partir del COP utilizando plataformas de
fuerzas [21]–[23].
En otro estudio se desarrolló un método para determinar el riesgo de desarrollar espasticidad en
neonatos y lactantes menores usando un sistema óptico de análisis de movimiento tridimensional
para obtener la cinemática del movimiento del infante. Sin embargo, debido a problemas de
oclusión de marcadores, únicamente fue posible obtener la cinemática de las extremidades
inferiores, tronco y cabeza de los neonatos [5].
Posteriormente fue desarrollado un sistema simple de bajo costo para determinar el riesgo de
desarrollar PC en neonatos y lactantes menores basado en 4 acelerómetros colocados en las
manos y pies del infante. Este sistema obtuvo razones de detección de superiores al 88%, sin
embargo, en su validación solo se incluyeron 4 infantes con PC [4].
Características de los sujetos de estudio
Debido a las diferencias naturales entre los lactantes menores nacidos a término y aquellos de pre
término, es importante conocer las características antropométricas básicas de cada uno, así como
conocer ciertos rangos normales de sus movimientos para poder comprenderlos mejor. En la
Tabla I podemos encontrar los datos recabados al respecto.
En cuanto a la afectación de los GM ante la presencia de peso en las extremidades, pruebas
realizadas demostraron que los lactantes menores presentan los GM sin alteraciones de ningún
tipo con un peso de hasta 140 g colocado en cada extremidad [10].

18
TABLA 1 CARACTERÍSTICAS FÍSICAS Y DE MOVIMIENTO DEL RECIÉN NACIDO Y LACTANTE MENOR
Normal o
término
Pre-termino o
en riesgo de
daño
neurológico
Rango de peso al nacera 3.06-3.48 kg 1.05-2.97 kg
Rango de peso a la semana 20b 6.3-8.2 kg 4.3-6.2 kg
Rango de talla al nacerb 48.2-52.8 cm 43.6-48 cm
Rango de talla a la semana 20b 63.2-68.6 cm 57.8-63 cm
Rango de peso que pueden cargar por extremidad sin alterar el
movimientoc
140 g 140 g
Tiempo de pataleo, medido en caderad (X±D.E.) 0.9 ± 0.6 s 1.1 ± 0.7 s
Tiempo de la fase de flexión en el pataleo, medido en caderad (X±D.E.) 0.4 ± 0.3 s 0.5 ± 0.4 s
Tiempo de la fase de extensión, medido en caderad (X±D.E.) 0.3 ± 0.3 s 0.4 ± 0.4 s
Velocidad angular pico de patada, medido en extensión de
rodillad(X±D.E.)
383.2 ± 238.5 °/s 287.9 (217.5)°/s
a.Tomado de Flores Huerta [24] b.Tomado de WHO [25] c. Tomado de Prechtl [10]. d. Tomado de Fetters [22].
X:media D.E. desviación estándar

19
III. Metodología
Diseño
El diseño de este sistema se realizó a partir de la recopilación de los requisitos del sistema y
selección tecnológica. Una vez definido lo anterior se diseñaron cada una de las partes que
integran al sistema: adquisición de señales, protocolo de instrumentación y software para
adquisición y procesamiento de señales.
Requerimientos Técnicos
De acuerdo al método de Prechtl, las mediciones deben realizarse durante las primeras 20
semanas de vida, por lo tanto se recabaron las características físicas y del movimiento del infante
tanto de término (nacido a partir de las 38-40 semanas de gestación) y el de pre-término (nacido
antes de las 38 semanas de gestación). El infante de término presenta poco riesgo de daño
neurológico, mientras que el de pre-término tiene un riesgo mayor [10].
En cuanto a las características de los movimientos a estudiar, los movimientos CS son
movimientos de tipo tremor, es decir, movimientos involuntarios, rítmicos y oscilatorios. El
tremor puede ser evaluado mediante plataformas de fuerza o acelerometría. Existen diferentes
tipos de tremor y su frecuencia dominante se relaciona con su naturaleza variando desde los
2.5 Hz en individuos con alteraciones cerebelosas hasta 16 Hz en pacientes con tremor
ortostático [26]. El resto de los movimientos puede llegar a incluir pataleos, los cuales pueden
considerarse los movimientos más fuertes y rápidos que llega a presentar el lactante menor y
llegan a tener una velocidad angular hasta de 600°/s [4], [5], [22], [23]
Por otra parte, se ha probado que los GM se presentan sin alteraciones incluso cuando se colocan
pesos de hasta 140 g en cada una de las extremidades del lactante menor [10].
20
Tomando en cuenta lo anterior, se requiere que el sistema de captura de movimiento del infante
tenga una frecuencia de muestreo mayor a 32 Hz, de manera que el movimiento tipo tremor
pueda ser analizado mediante la transformada de Fourier. La plataforma de fuerza es capaz de
detectar el tremor sin limitar o entorpecer el movimiento del infante y sin estimularlo o
molestarlo, por lo que es una alternativa tecnológica adecuada para este proyecto.
Por otro lado, los sensores inerciales no deben tener un peso mayor al que puede soportar el
infante (140 g) sin entorpecer su movimiento. Además, tomando en consideración las
descripciones del pataleo, los sensores inerciales deben tener un rango de medición de velocidad
angular mayor a los 600°/s para poder capturar la información necesaria de los movimientos del
lactante menor.
Siguiendo las recomendaciones del método de Prechtl, la captura de video debe realizarse
durante una hora preferentemente, por lo cual el sistema debe ser capaz de registrar datos
simultáneamente de sus diversas fuentes durante este periodo y posteriormente realizar el
procesamiento de todos los datos obtenidos.
Selección Tecnológica
Después de realizar una evaluación de las tecnologías de análisis de movimiento disponibles, se
decidió realizar un sistema mixto que permita obtener información acerca del comportamiento
postural del lactante menor mediante el uso de una plataforma de fuerza inalámbrica Wii Balance
Board (Nintendo, Kyoto, Japón), la cual es una plataforma que calcula el centro de presiones a
partir de la medición de la fuerza vertical aplicada en cada uno de los cuatro extremos, registrada
por medio de galgas extensiométricas [27]. Ya en trabajos anteriores se ha reportado que la Wii
Balance Board puede ser usada en estudios de posturografía [28]. Por otra parte, la medición de
aceleraciones y velocidades angulares en los pies y manos, así como una referencia en el pecho,
se realiza utilizando 5 IMUs MTx (Xsens, Enschede, Países Bajos) con un peso de 30 g y
medidas de 38 x 53 x 21 mm y una duración de pila de 3.5 h. La captura de video se lleva a cabo
mediante el uso de una cámara Logitech HD Pro Webcam C910 con capacidad de video Full HD
1080p a 25 cuadros por segundo (Logitech, Morges, Suiza). Finalmente, la frecuencia cardiaca

21
es medida utilizando un Zephyr HXM (Zephyr Technology, Annapolis, USA) basado en
tecnología electrocardiográfica y con una frecuencia de muestreo de 1 Hz.
Adquisición de señales
Los IMUs MTx muestrean los datos de aceleración y las velocidades angulares en los 3 ejes a
una frecuencia de 50 Hz, por lo que en cada paquete de datos leído se tendrán 6 datos por sensor.
La plataforma Wii Balance Board obtiene a partir de las fuerzas y momentos en sus 4 esquinas
las coordenadas X y Y del COP y tiene una frecuencia máxima de muestreo de 100 Hz, sin
embargo, para poder procesar los datos de manera conjunta a los de los MTx se decidió tomar los
datos con una frecuencia de 50 Hz sincronizada con el muestreo de los MTx.
El Zephyr adquiere la frecuencia cardiaca del lactante menor cada segundo, mediante un
electrocardiograma simplificado. Los datos del Zephyr son leídos cada segundo,
independientemente de las demás partes del sistema.
Finalmente, la cámara captura imágenes con una resolución de 1280 x 720 pixeles y un total de
25 cuadros por segundo. Cada cuadro recibe una estampa de tiempo que permite relacionarlo con
los datos recibidos de los MTx y de la Wii Balance Board.
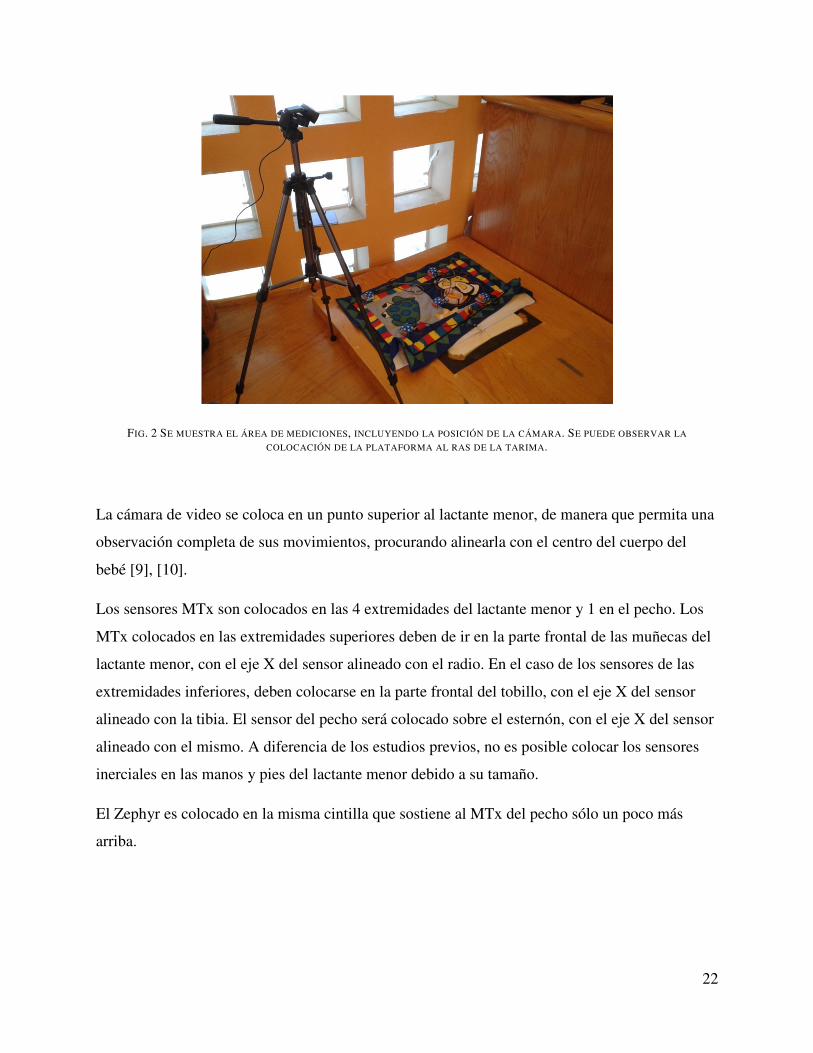
Protocolo de instrumentación
El montaje del sistema se encuentra en una plataforma de madera de 10 cm de alto colocada
sobre el piso. Esta plataforma cuenta con un nicho para colocar la Wii Balance Board de manera
que su superficie queda al nivel de la plataforma de madera en la que se coloca al lactante menor,
ver Fig. 2. El eje X de la plataforma va alineado con la línea sagital del lactante menor. El
sistema se ubica en un lugar en el que se minimizan las distracciones para el sujeto, lo cual
permite una mejor observación de los GM [9], [10].
22
FIG. 2 SE MUESTRA EL ÁREA DE MEDICIONES, INCLUYENDO LA POSICIÓN DE LA CÁMARA. SE PUEDE OBSERVAR LA
COLOCACIÓN DE LA PLATAFORMA AL RAS DE LA TARIMA.
La cámara de video se coloca en un punto superior al lactante menor, de manera que permita una
observación completa de sus movimientos, procurando alinearla con el centro del cuerpo del
bebé [9], [10].
Los sensores MTx son colocados en las 4 extremidades del lactante menor y 1 en el pecho. Los
MTx colocados en las extremidades superiores deben de ir en la parte frontal de las muñecas del
lactante menor, con el eje X del sensor alineado con el radio. En el caso de los sensores de las
extremidades inferiores, deben colocarse en la parte frontal del tobillo, con el eje X del sensor
alineado con la tibia. El sensor del pecho será colocado sobre el esternón, con el eje X del sensor
alineado con el mismo. A diferencia de los estudios previos, no es posible colocar los sensores
inerciales en las manos y pies del lactante menor debido a su tamaño.
El Zephyr es colocado en la misma cintilla que sostiene al MTx del pecho sólo un poco más
arriba.

23
Software
El software del sistema fue desarrollado en el lenguaje C# utilizando Windows 7. El lenguaje C#
fue elegido debido a la existencia de librerías de licencia abierta que permiten el control de
hardware de bajo nivel como la Webcam y la Wii Balance Board, así como la compatibilidad
necesaria con C++ para poder interactuar y obtener los datos de los sensores MTx.
Por otra parte, C# proporciona la versatilidad necesaria para desarrollar un programa con una
interfaz de usuario clara y un manejo de eventos que permite la sincronización adecuada al
obtener los datos de los distintos dispositivos. Podemos observar la interfaz en la Fig. 3.
La adquisición de datos de los sensores MTx se realiza utilizando las librerías proporcionadas en
el MTx Software Development Kit (Xsens, Enschede, Países Bajos). Esta librería permite
realizar la conexión con los sensores MTx, así como leer los paquetes de datos enviados por
ellos.
FIG. 3 SE MUESTRA LA INTERFAZ DE USUARIO DEL SOFTWARE. DEL LADO IZQUIERDO DE OBSERVA LA GRÁFICA DE LOS DATOS
RECIBIDOS POR LOS MTX. DEL LADO DERECHO PODEMOS OBSERVAR EL VIDEO, LA GRÁFICA DEL CENTRO DE PRESIONES Y LA
FRECUENCIA CARDIACA.

24
Para la conexión y adquisición de datos de la Wii Balance Board se utiliza la librería de licencia
abierta Wiimotelib (Brian Peek), la cual permite establecer la conexión mediante Bluetooth con
la plataforma, así como su configuración y la lectura de los datos registrados por ella.
Por otra parte, la conexión y adquisición de datos del Zephyr se realiza utilizando código propio,
simplemente mediante el manejo de puertos.
En cuanto a la captura de video, se utilizó la librería de licencia abierta Aforge (AForge.NET),
mediante la cual se despliega el video en tiempo real en la interfaz del programa mientras se
guarda el video en un archivo.
El programa consta de dos partes, aquella encargada de la captura de los datos y la encargada del
procesamiento de los mismos. Se decidió hacer de esta manera debido al enorme volumen de
datos, por lo que un procesamiento en tiempo real no sería ideal y podría afectar la adecuada
adquisición de los datos.
La fase de captura de datos comienza al escanear los puertos de la computadora en busca de los
MTx, la Wii Balance Board, el Zephyr y la webcam. En caso de que el programa no encuentre
alguno de ellos, el usuario no puede proseguir. Una vez detectados los miembros necesarios, el
programa se conecta con ellos, desplegando en tiempo real datos de los MTx y las coordenadas
del COP en gráficas, así como un cuadro con el video de la webcam. Una vez que el usuario
verifica el funcionamiento de todos los miembros, puede comenzar la grabación de los datos.
Como se mencionó anteriormente, los datos de la Wii Balance Board y de los MTx son
obtenidos simultáneamente de manera que puedan ser pareados. Para lograr esto, el programa lee
los datos de ambas fuentes cada vez que los MTx activan un evento de un nuevo dato recibido, lo
que equivale a una frecuencia de 50 Hz. A cada lectura realizada de estas fuentes se le asigna una
estampa de tiempo y se escribe línea por línea en un archivo de texto (.txt).
La cámara captura cuadro por cuadro, anexando cada cuadro a un archivo de video (.avi). A cada
cuadro se le asigna a su vez una estampa de tiempo, que permite relacionar los datos obtenidos
de la Wii Balance Board y de los MTx con la información obtenida en el video.
El procesamiento se realiza una vez finalizada la captura de los datos. El programa lee línea por
línea el archivo de texto en ventanas de 0.5 segundos y realiza los cálculos necesarios para

25
acondicionar los datos, previo al cálculo de las variables de interés. El tamaño de la ventana fue
definido como un compromiso para contener información representativa de un gesto motor del
movimiento del lactante menor, sin ser una carga en el procesamiento de la señal debido al
número de operaciones o cantidad de variables generadas.
Debido a que los acelerómetros de los MTx registran todas las aceleraciones aplicadas a ellos, es
necesario eliminar el vector de la aceleración causada por la gravedad, de manera que se
obtengan sólo aquellas aceleraciones generadas por el movimiento del lactante menor. Para
lograr esto se realiza un filtrado de los datos de aceleración, utilizando un filtro Butterworth pasa
altas de segundo orden, con una frecuencia de corte de 0.16 Hz [4].
Al finalizar el procesamiento, el usuario cuenta con variables calculadas para cada ventana de 0.5
segundos, incluyendo información en el dominio de la frecuencia del COP, medidas de suavidad
del movimiento basadas en tirón, picos de velocidad en las extremidades, periodicidad en los
movimientos, entre otras [4], [5]. Con dicha información se puede conocer si los movimientos
realizados por el lactante menor se ajustan a las características de los GM y, por lo tanto,
mediante la presencia o ausencia de los GM determinar si el lactante menor es catalogado como
en riesgo de PC. La interfaz de procesamiento se muestra en la Fig. 4.
FIG. 4 SE MUESTRA EL CUADRO DE DIÁLOGO PARA EL PROCESAMIENTO. SE PUEDE ELEGIR ENTRE PROCESAR DATOS RECIÉN
CAPTURADOS O UN ARCHIVO ANTERIOR. EN LA PARTE INFERIOR SE MUESTRA EL ESTATUS DE PROCESAMIENTO.

26
Variables a Calcular
Las variables calculadas por el sistema fueron elegidas al realizar una interpretación de las
variables subjetivas utilizadas en el método de Prechtl para describir los GM como se puede
apreciar en la Tabla 2. Las variables que son calculadas a partir de velocidad, aceleración,
velocidad angular y tirón se obtienen a partir de los datos proporcionados por los IMUs, aquellas
relacionadas con el COP se obtienen a partir de los datos de la plataforma de fuerza y la
frecuencia cardiaca es obtenida a partir del Zephyr.
TABLA 2 RELACIÓN ENTRE LAS CARACTERÍSTICAS SUBJETIVAS DE LOS MOVIMIENTOS GENERALES Y LAS VARIABLES A
CALCULAR
Características de los GM Variables a calcular
Armonioso Área en la que el perfil de velocidad se aleja de la
media/desviación estándar móvil
Complejo Periodicidad de brazos y piernas
Suave Suavidad Basada en Tirón
Número de Picos en la velocidad
Coeficiente de movimiento/pausa (MAPR)
Movimiento Simultáneo de Brazos y Piernas Correlaciones cruzadas entre segmentos.
Lentos Oblicuidad de la velocidad
Tremor (En movimientos CS) Razón de Oscilación
Velocidad RMS del COP
27
La lista completa de las variables a calcular es la siguiente:
• Oblicuidad en la aceleración de cada segmento. • Oblicuidad de la velocidad de cada segmento. • Oblicuidad de la velocidad angular de cada segmento. • Correlación cruzada en aceleración entre pierna derecha e izquierda. • Correlación cruzada en aceleración entre brazo derecho e izquierdo. • Correlación cruzada en aceleración entre brazo derecho y pierna derecha. • Correlación cruzada en aceleración entre brazo derecho y pierna izquierda. • Correlación cruzada en aceleración entre brazo izquierdo y pierna izquierda. • Correlación cruzada en aceleración entre brazo izquierdo y pierna derecha. • Promedio de las correlaciones cruzadas en aceleración. • Correlación cruzada en velocidad entre pierna derecha e izquierda. • Correlación cruzada en velocidad entre brazo derecho e izquierdo. • Correlación cruzada en velocidad entre brazo derecho y pierna derecha. • Correlación cruzada en velocidad entre brazo derecho y pierna izquierda. • Correlación cruzada en velocidad entre brazo izquierdo y pierna izquierda. • Correlación cruzada en velocidad entre brazo izquierdo y pierna derecha. • Correlación cruzada en velocidad angular entre pierna derecha e izquierda. • Correlación cruzada en velocidad angular entre brazo derecho e izquierdo. • Correlación cruzada en velocidad angular entre brazo derecho y pierna derecha. • Correlación cruzada en velocidad angular entre brazo derecho y pierna izquierda. • Correlación cruzada en velocidad angular entre brazo izquierdo y pierna izquierda. • Correlación cruzada en velocidad angular entre brazo izquierdo y pierna derecha. • Aceleración máxima de cada segmento. • Velocidad mínima de cada segmento. • Periodicidad en el perfil de velocidad de las piernas. • Periodicidad en el perfil de velocidad de los brazos. • Área en la que el perfil de velocidad de las piernas se aleja del promedio móvil. • Área en la que el perfil de velocidad de los brazos se aleja del promedio móvil. • Área en la que el perfil de velocidad de las piernas se aleja de la desviación estándar
móvil. • Área en la que el perfil de velocidad de los brazos se aleja de la desviación estándar
móvil. • Suavidad basada en tirón de cada segmento. • Proporción de tiempo que la velocidad supera el 10% de la velocidad pico. También se
conoce como “Movement Arrest Period Ratio” o MAPR. Se calcula para cada segmento. • Número de picos en el perfil de velocidad de cada segmento. • El recorrido del COP. • El recorrido unitario del COP. También se conoce como la velocidad media del COP. • Razón de oscilación del COP. • Velocidad RMS del COP. • Oblicuidad del COP. • La razón entre el recorrido del COP y el área de oscilación circular del mismo.

28
• La transformada de Fourier del COP. • Frecuencia cardiaca promedio.

29
Pruebas
Pruebas preliminares
Se realizaron varias pruebas preliminares con los sensores estáticos, de manera que se pudiera
probar la capacidad del sistema de realizar una grabación de una hora, así como verificar que las
frecuencias de muestreo fueran las adecuadas y el funcionamiento general del programa y su
interfaz.
Prueba técnica
Para verificar el funcionamiento adecuado del sistema se desarrolló una prueba sencilla en la que
los resultados obtenidos pudieran ser comparados con un modelo conocido. La prueba consistió
en colocar los sensores en una vara rígida de madera sujeta a un tubo a los cuales se les dejó caer
desde una posición paralela al suelo, de esta forma la vara, y por tanto los sensores, seguirían un
movimiento pendular amortiguado.
El centro del primer sensor fue colocado a 8 cm del centro de giro de la vara, y el centro de cada
sensor sucesivo fue colocado a 17 cm del centro del anterior a lo largo de la vara. Se puede
observar la instrumentación de la prueba en la Fig. 5.
La ecuación utilizada para describir la velocidad angular del sistema es:
�(�) = 0.8394 × (��.�������.����) × cos�(3.8480 + 0.0158�)� − 1.5150� − 0.0098 (1)
Con los datos obtenidos de la prueba se calcularon todas las variables que obtiene el sistema para
el modelo y para los datos medidos. Posteriormente se compararon los resultados utilizando la
prueba de Kolmogorov-Smirnov y la prueba U de Mann-Whitney, ambas con un nivel de
significación α=0.05.

30
FIG. 5 SE MUESTRA LA VARA DE MADERA CON LOS MTX UTILIZADA PARA REALIZAR UN MOVIMIENTO PENDULAR EN LA
PRUEBA TÉCNICA.
Pruebas con lactantes menores
Se realizaron pruebas del sistema con 3 lactantes menores diferentes, siguiendo el protocolo de
instrumentación antes detallado. Cada prueba buscó tener una duración de entre 30 y 60 minutos,
sin embaro, si el lactante menor pasaba de un estado de vigilia tranquilo a estar alterado o
llorando y no se lograba tranquilizarlo, la prueba era detenida. Las descripciones de los lactantes
menores que participaron en las pruebas se dan a continuación.
• Sujeto 1.- Paciente femenino con 18 semanas de edad, talla de 53 cm, peso de 3.600 kg,
perímetro cefálico de 36.8 cm y perímetro torácico de 40.5 cm. El paciente nació a las 33
semanas de gestación con una talla de 40 cm y un peso de 1.348 kg, presentando un
Apgar de 8/9. Se considera paciente con potencial riesgo de daño neurológico.

31
• Sujeto 2.- Paciente masculino con 18 semanas de edad, talla de 53 cm, peso de 4.600 kg,
perímetro cefálico de 37.8 cm y perímetro torácico de 40.6 cm. El paciente nació a las 33
semanas de gestación con una talla de 35 cm y un peso de 1.090 kg, presentando un
Apgar de 8/9. Se considera paciente con potencial riesgo de daño neurológico debido a
las condiciones de su nacimiento, sin embargo, evaluaciones realizadas por médicos han
determinado un riesgo bajo de alteraciones neurológicas.
• Sujeto 3.- Paciente femenino con 18 semanas de edad, talla de 47 cm, peso de 2.800 kg,
perímetro cefálico de 35.2 cm y perímetro torácico de 33.5 cm. El paciente nació a las 33
semanas de gestación con una talla de 37 cm y un peso de 1.060 kg, presentando un
Apgar de 4/9. Se considera paciente con potencial riesgo de daño neurológico.

32
IV. Resultados
Pruebas Preliminares
Las pruebas preliminares mostraron que el sistema efectivamente permite realizar pruebas de
más de una hora, sin presentar problemas de hardware (como la duración de las baterías) ni de
software (errores inesperados). La frecuencia de muestreo de los MTx y de la Wii Balance Board
fue efectivamente de 50 Hz, mientras que la frecuencia cardiaca fue correctamente adquirida a
1 Hz.
El video resultante en las pruebas preliminares cuenta con el número correcto de cuadros por
segundo (25 fps) y una duración que concuerda exactamente con el tiempo transcurrido en la
prueba.
Es importante destacar que durante las pruebas preliminares se encontró un error del 3.76% en la
frecuencia de muestreo, el cual es originado por los IMUs, debido a su protocolo de muestreo y
envío de información hacia la computadora.
Prueba técnica
Los datos medidos por los sensores en la prueba técnica fueron los esperados. Los sensores sólo
registraron mediciones significativas de velocidad angular en su eje z, el cual corresponde con el
eje de giro del péndulo. Dicha velocidad angular no mostró diferencias significativas con la
calculada por el modelo. De igual manera, las curvas de aceleración y velocidad, una vez
filtradas para eliminar el efecto de la gravedad, mostraron un buen ajuste, como se puede
apreciar en las Fig. 5 y 6.
En el cálculo de variables, la mayoría no mostraron diferencias significativas en ninguna de las
pruebas estadísticas, sin embargo algunas mostraron diferencias significativas en al menos una
de las pruebas.

33
FIG. 6 SE MUESTRA LA COMPARACIÓN ENTRE LA ACELERACIÓN CALCULADA POR EL MODELO Y LA MEDIDA POR LOS
SENSORES. LAS CURVAS MUESTRAN GRAN SIMILITUD.
Las variables que mostraron diferencias significativas en ambas pruebas fueron las siguientes:
• Área en la que el perfil de velocidad de las piernas se aleja del promedio móvil. • Área en la que el perfil de velocidad de los brazos se aleja del promedio móvil. • Área en la que el perfil de velocidad de las piernas se aleja de la desviación estándar
móvil. • Área en la que el perfil de velocidad de los brazos se aleja de la desviación estándar
móvil. • Suavidad basada en tirón de los dos sensores más cercanos al eje de giro del péndulo.
Las variables que mostraron diferencias significativas sólo en la prueba de Kolmogorov-Smirnov
fueron las siguientes:
• Suavidad basada en tirón de los 3 sensores más alejados del eje de giro del péndulo.
Las demás variables no mostraron ninguna diferencia significativa entre el modelo y los datos
obtenidos por el sistema.
-6
-4
-2
0
2
4
6
8
10
0 5 10 15 20 25Ace
lera
ción
(m
/s²)
Tiempo (s)
Resultados de la prueba técnica (Aceleración)
Modelo
Sensores

34
FIG. 7 SE MUESTRA LA COMPARACIÓN ENTRE LAS VELOCIDADES CALCULADAS POR EL MODELO Y LAS CALCULADAS A PARTIR
DE LOS SENSORES. LAS CURVAS MUESTRAN GRAN SIMILITUD.
Prueba con lactante menor
• Sujeto 1.- Se consiguieron alrededor de 45 minutos de grabación, de los cuales se
consideró que durante aproximadamente 30 minutos el lactante menor se encontró en el
estado de ánimo correcto para que los datos sean de utilidad, quitando algunos momentos
dónde fue necesario recolocar el IMU de la pierna izquierda, ya que constantemente salía
de su posición, y momentos donde se tuvo que recolocar al lactante menor en la
plataforma. Por otra parte, se observó que el IMU colocado en el pecho no mantenía una
posición correcta y que el Zephyr no lograba hacer contacto correcto para obtener la
frecuencia cardiaca. Se decidió modificar el brazalete de la pierna izquierda para evitar la
salida del IMU en los siguientes dos sujetos. Podemos observar al sujeto 1 durante la
prueba en la Fig. 8.
• Sujeto 2.- Se consiguieron solamente 14 minutos de grabación, de los cuales sólo
alrededor de 4 minutos fueron considerados útiles, pues el lactante menor mostró
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0 5 10 15 20 25
Vel
ocid
ad (
m/s
)
Tiempo (s)
Resultados de la prueba técnica (Velocidad)
ModeloSensores

35
desesperación y llanto durante la mayor parte de la prueba. Se muestra al sujeto 2 durante
la prueba en la Fig. 9.
FIG. 8 SUJETO 1 DURANTE LA PRUEBA.
FIG. 9 SUJETO 2 DURANTE LA PRUEBA. SE MUESTRA QUE EL SUJETO TUVO QUE SER CALMADO DURANTE LA MEDICIÓN.
36
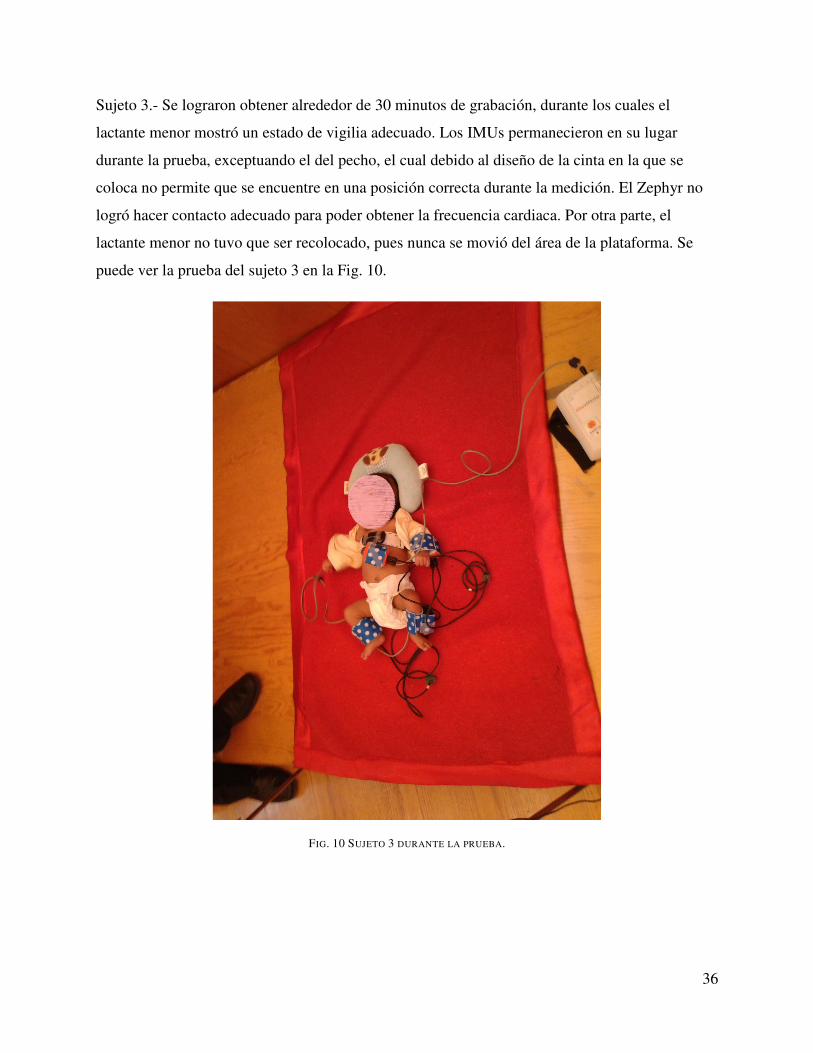
Sujeto 3.- Se lograron obtener alrededor de 30 minutos de grabación, durante los cuales el
lactante menor mostró un estado de vigilia adecuado. Los IMUs permanecieron en su lugar
durante la prueba, exceptuando el del pecho, el cual debido al diseño de la cinta en la que se
coloca no permite que se encuentre en una posición correcta durante la medición. El Zephyr no
logró hacer contacto adecuado para poder obtener la frecuencia cardiaca. Por otra parte, el
lactante menor no tuvo que ser recolocado, pues nunca se movió del área de la plataforma. Se
puede ver la prueba del sujeto 3 en la Fig. 10.
FIG. 10 SUJETO 3 DURANTE LA PRUEBA.

37
V. Conclusiones, recomendaciones y trabajo futuro
Diferencias con otros sistemas y Conclusiones
El sistema y la metodología desarrollada permiten calcular parámetros objetivos que reflejan
parámetros subjetivos usados por los clínicos durante la valoración visual del movimiento del
recién nacido y lactante menor, para encontrar las diferencias y comparar los GM de sujetos con
alto riesgo y sin riesgo. A diferencia de estudios previos dónde se han realizado mediciones sólo
utilizando cámaras o acelerómetros, se desarrolló un sistema mixto que permite obtener
información acerca de los cambios posturales del infante mediante el análisis del COP, al mismo
tiempo que se registran los movimientos de sus extremidades [4], [5].
Por otra parte, el sistema utiliza IMUs que permiten obtener tanto la aceleración como la
velocidad angular, mientras que en estudios anteriores la información principal considerada fue
obtenida sólo a partir de las aceleraciones, además, se cuenta con la captura de video de manera
sincronizada, que puede ser analizado posteriormente y ser usado a largo plazo en el monitoreo
del desarrollo motor del infante [4].
Realizando una comparación con un sistema desarrollado anteriormente mediante el uso de
cámaras y marcadores, se observa una diferencia clave, ya que en dicho estudio la oclusión de
marcadores impidió utilizar datos de los brazos, por lo que sólo se utilizaron datos de las piernas
en el procesamiento, mientras que el presente sistema es capaz de recopilar información de todas
las extremidades [5].
Dentro de la prueba técnica, las diferencias significativas encontradas en algunas variables
parecen tener una explicación clara. Las variables que presentaron diferencias significativas son
medidas que buscan establecer la suavidad del movimiento, por lo que son más susceptibles al
ruido y a pequeños cambios. Si consideramos que el modelo utilizado no considera ningún
movimiento fuera del plano x-y de los sensores pero en la realidad del experimento existen
ciertas oscilaciones a lo largo del eje z debidas a la fricción y al juego que existe en el
acoplamiento entre la vara y el eje de giro, dichas oscilaciones son captadas por los
acelerómetros de los sensores y pueden ser la causa de las diferencias encontradas.

38
Como se mencionó anteriormente el principal problema a vencer de cualquier método para
detección temprana de PC es el tiempo necesario para obtener el diagnóstico clínico contra el
cual comparar los resultados y poder evaluar la sensibilidad y especificidad del sistema. El
diagnóstico clínico se obtiene entre los 2 y 4 años de edad del infante y ha sido un obstáculo
enfrentado por investigaciones similares [4], [5]. Sin embargo, el potencial beneficio de este
sistema radica en poder evaluar el riesgo de PC en el lactante menor, 2 años antes de lo que los
métodos actuales lo hacen, permitiendo una mejor rehabilitación gracias a la intervención y
estimulación temprana.
El objetivo general de este proyecto a futuro requiere de una validación clínica del sistema
mediante pruebas en sujetos sanos y en riesgo y su posterior monitoreo a largo plazo para
determinar el desarrollo de PC.
El análisis de movimiento muestra un potencial interesante en el diagnóstico temprano de riesgo
de PC. El presente trabajo muestra el desarrolló un sistema y una metodología que permiten la
descripción objetiva y cuantitativa de movimientos espontáneos del recién nacido de forma no
intrusiva.
En conclusión, se desarrolló un sistema capaz de capturar de manera sincronizada los datos de
aceleración, velocidad angular, COP y frecuencia cardiaca al mismo tiempo que se realiza una
grabación de video, mediante el uso de 5 IMUs, una cámara de video, un sensor de frecuencia
cardiaca y una plataforma de fuerza. Además, los datos obtenidos por el sistema son procesados
para obtener variables seleccionadas por su relación con las características subjetivas que
describen los GM de acuerdo al método de Prechtl.
Finalmente, el sistema fue validado mediante una prueba técnica y pruebas con lactantes
menores. La prueba técnica mostró que el sistema se comporta de la manera esperada y que los
datos obtenidos y calculados por el mismo son correctos. La prueba con lactantes menores fue
diseñada para observar la usabilidad del sistema, pues por el reducido tamaño de la muestra no se
obtienen datos significativos para una validación clínica, sin embargo, permitió demostrar que el
sistema es adecuado para su aplicación en los mismos, causando el mínimo de intrusión y
molestias en los pacientes, aunque se depende en gran medida de las condiciones del lactante
menor (tiempo desde la última comida, ánimo, temperatura ambiente, etc.), con estas pruebas

39
con pacientes se encontraron áreas de oportunidad, principalmente relativas al diseño de la
sujeción de los sensores en el paciente.
Recomendaciones
La principal recomendación sería el migrar el sistema al uso de sensores más compactos y de
preferencia inalámbricos en lugar de los MTx utilizados actualmente. Sin embargo, esto puede
conllevar ciertas desventajas. Por ejemplo, si el sistema es migrado al uso de acelerómetros más
compactos, se obtienen beneficios en cuanto a la instrumentación, sin embargo, se perdería la
información recabada por el giroscopio que puede ofrecer información interesante en particular
en los sensores de los brazos, debido a ciertos movimientos rotatorios de las manos. Migrar el
sistema al uso de IMUs inalámbricos podría ser la mejor solución, pues la información adquirida
seguiría siendo la misma, sin embargo, el costo es mayor y los problemas de tamaño y peso del
sensor seguirían siendo prácticamente los mismos, pues las diferencias son mínimas.
Por otra parte, podría ser de utilidad considerar la aplicación de un filtro pasa bajas en la
adquisición de las aceleraciones, pues cierto ruido puede estar presente y afectar el cálculo de las
variables, particularmente aquellas de suavidad que son sensibles a cambios de alta frecuencia.
Finalmente, se recomienda realizar modificaciones en la sujeción de los sensores al lactante
menor, pues se observó que algunos sensores salían de los brazaletes. Es particularmente
importante el rediseño de la banda colocada en el pecho, pues en su forma actual no permite un
contacto adecuado para que el Zephyr pueda medir la frecuencia cardiaca y el IMU colocado en
ella no permanece en el lugar correcto.
Trabajo futuro
La primera cuestión a atacar a partir de este punto sería el mejoramiento de los brazaletes de
sujeción de los IMUs y, en especial, la modificación del diseño de la banda del pecho, de forma
que el Zephyr logre obtener datos de la frecuencia cardiaca del lactante menor y el IMU
colocado en el pecho permanezca en una posición adecuada.
El siguiente paso en el desarrollo del sistema sería la validación. Actualmente se cuenta con un
sistema que permite recabar datos de los lactantes menores y calcular parámetros objetivos de

40
interés. Ahora es necesario realizar mediciones y el seguimiento de dos grupos de lactantes
menores a término y lactantes menores pre-término para realizar una comparación entre los
parámetros obtenidos de ambos grupos. A partir de estos datos, se debe implementar un
algoritmo de optimización de los parámetros, que permita establecer cuáles variables nos
proporcionan la mayor información.
De la misma manera, es importante realizar una comparación entre la perspectiva de un médico
certificado en el método de Prechtl, el cual puede indicar momentos específicos de interés
durante la prueba, y compararlo con los datos obtenidos por el sistema. Finalmente, pasados dos
años de las pruebas realizadas a los dos grupos de lactantes menores, es necesario recabar
información sobre si fueron efectivamente diagnosticados con PC o no, y de esta forma poder
conocer la sensibilidad y especificidad del sistema, así como poder realizar ajustes en la
optimización de los parámetros.

41
Bibliografía
[1] C. L. Richards and F. Malouin, “Cerebral palsy,” in Handbook of Clinical Neurology, vol. 111, Elsevier, 2013, pp. 183–195.
[2] J. Narbona and C. Reynoso, “Prognosis of neurodevelopmental disorders from clinically-based criteria: usefulness of the observation of general movements,” Rev. Neurol., vol. 44 Suppl 3, pp. S39–42, May 2007.
[3] I. Minciu, “Clinical correlations in cerebral palsy,” Maedica (Buchar), vol. 7, no. 4, pp. 319–324, Dec. 2012.
[4] F. Heinze, K. Hesels, N. Breitbach-Faller, T. Schmitz-Rode, and C. Disselhorst-Klug, “Movement analysis by accelerometry of newborns and infants for the early detection of movement disorders due to infantile cerebral palsy,” Med. Biol. Eng. Comput., vol. 48, no. 8, pp. 765–772, May 2010.
[5] L. Meinecke, N. Breitbach-Faller, C. Bartz, R. Damen, G. Rau, and C. Disselhorst-Klug, “Movement analysis in the early detection of newborns at risk for developing spasticity due to infantile cerebral palsy,” Hum. Mov. Sci., vol. 25, no. 2, pp. 125–144, Apr. 2006.
[6] M. El-Dib, A. N. Massaro, P. Glass, and H. Aly, “Neurodevelopmental assessment of the newborn: An opportunity for prediction of outcome,” Brain Dev., vol. 33, no. 2, pp. 95–105, Feb. 2011.
[7] C. H. Blauw-Hospers and M. Hadders-Algra, “A systematic review of the effects of early intervention on motor development,” Dev. Med. Child Neurol., vol. 47, no. 6, pp. 421–432, Feb. 2007.
[8] C. Disselhorst-Klug, F. Heinze, N. Breitbach-Faller, T. Schmitz-Rode, and G. Rau, “Introduction of a method for quantitative evaluation of spontaneous motor activity development with age in infants,” Exp. Brain Res. Exp. Hirnforsch. Expérimentation
Cérébrale, vol. 218, no. 2, pp. 305–313, Apr. 2012. [9] C. Einspieler and H. F. R. Prechtl, “Prechtl’s assessment of general movements: A
diagnostic tool for the functional assessment of the young nervous system,” Ment. Retard.
Dev. Disabil. Res. Rev., vol. 11, no. 1, pp. 61–67, Feb. 2005. [10] C. Einspieler and H. F. R. Prechtl, Prechtl’s method on the qualitative assessment of
general movements in preterm, term, and young infants. London: Mac Keith Press, 2004. [11] H. F. Prechtl, C. Einspieler, G. Cioni, A. F. Bos, F. Ferrari, and D. Sontheimer, “An early
marker for neurological deficits after perinatal brain lesions,” Lancet, vol. 349, no. 9062, pp. 1361–1363, May 1997.
[12] F. Ferrari, G. Cioni, and H. F. Prechtl, “Qualitative changes of general movements in preterm infants with brain lesions,” Early Hum. Dev., vol. 23, no. 3, pp. 193–231, Sep. 1990.
[13] C. Einspieler, G. Cioni, P. B. Paolicelli, A. F. Bos, A. Dressler, F. Ferrari, M. F. Roversi, and H. F. R. Prechtl, “The early markers for later dyskinetic cerebral palsy are different from those for spastic cerebral palsy,” Neuropediatrics, vol. 33, no. 2, pp. 73–78, Apr. 2002.
[14] A. P. McCarraher-Wetzel and R. C. Wetzel, “A review of the Amiel-Tison neurologic evaluation of the newborn and infant,” Am. J. Occup. Ther. Off. Publ. Am. Occup. Ther.
Assoc., vol. 38, no. 9, pp. 585–593, Sep. 1984.

42
[15] D. Paro-Panjan, D. Neubauer, J. Kodric, and B. Bratanic, “Amiel-Tison Neurological Assessment at term age: clinical application, correlation with other methods, and outcome at 12 to 15 months,” Dev. Med. Child Neurol., vol. 47, no. 01, Jan. 2005.
[16] S. Andrews and S. Federico, “Optical Measurement of Position.” University of Calgary, 2011.
[17] S. G. Latta, K. Tsuneda, K. Gehner, R. Markovic, D. A. Bennett, and K. Stone Perez, “Gesture Keyboarding,” 2010/019922805-Aug-2010.
[18] A. Godfrey, R. Conway, D. Meagher, and G. ÓLaighin, “Direct measurement of human movement by accelerometry,” Med. Eng. Phys., vol. 30, no. 10, pp. 1364–1386, Dec. 2008.
[19] M. El-Gohary and J. McNames, “Shoulder and Elbow Joint Angle Tracking With Inertial Sensors,” IEEE Trans. Biomed. Eng., vol. 59, no. 9, pp. 2635–2641, Sep. 2012.
[20] M. Duarte and S. M. S. F. Freitas, “Revision of posturography based on force plate for balance evaluation,” Rev. Bras. Fisioter. São Carlos São Paulo Braz., vol. 14, no. 3, pp. 183–192, Jun. 2010.
[21] B. Fallang, O. D. Saugstad, and M. Hadders-Algra, “Postural adjustments in preterm infants at 4 and 6 months post-term during voluntary reaching in supine position,” Pediatr. Res., vol. 54, no. 6, pp. 826–833, Dec. 2003.
[22] L. Fetters, I. Sapir, Y. Chen, M. Kubo, and E. Tronick, “Spontaneous kicking in full-term and preterm infants with and without white matter disorder,” Dev. Psychobiol., vol. 52, no. 6, pp. 524–536, Sep. 2010.
[23] J. P. Piek and N. Gasson, “Spontaneous kicking in fullterm and preterm infants: Are there leg asymmetries?,” Hum. Mov. Sci., vol. 18, no. 2–3, pp. 377–395, Jun. 1999.
[24] S. Flores Huerta and H. Martínez Salgado, “Peso al nacer de los niños y niñas derechohabientes del Instituto Mexicano del Seguro Social,” Bol Med Hosp Infant Mex, vol. 69, pp. 30–39, 2012.
[25] World Health Organization, Measuring change in nutritional status: guidelines for
assessing the nutritional impact of supplementary feeding programmes for vulnerable
groups. Geneva; Albany, N.Y.: World Health Organization ; Obtainable from WHO Publications Centre USA], 1983.
[26] K. Yarrow, P. Brown, M. A. Gresty, and A. M. Bronstein, “Force platform recordings in the diagnosis of primary orthostatic tremor,” Gait Posture, vol. 13, no. 1, pp. 27–34, Feb. 2001.
[27] M. Okamoto and S. Kasamatsu, “Storage Medium Storing a Load Detexting Program and Load Detecting Apparatus,” US 2009/0093305abril-2009.
[28] A. Cárdenas de la Parra, A. Pérez Sanpablo, A. González Mendoza, I. Quiñones Urióstegui, A. Alessi Montero, L. Núñez Carrera, G. Rodríguez Reyes, and M. Bourdon Santoyo, “Validación de la Plataforma Wii Balance Board como Instrumento para Realizar Estudios de Posturografía Estática,” Memorias III Congr. Int. Investig. En Rehabil., p. 41, Nov. 2012.
43
Apéndices
Apéndice A: Glosario de Siglas
• COP.- Centro de presiones, proveniente del inglés Centre of Pressure.
• CS.- Movimientos espasmódicos-sincrónicos. Del inglés Cramped Synchronized.
• FM.- Movimientos enredadores. Del inglés Fidgety Movements.
• GM.- Movimientos Generales. Del inglés General Movements.
• IMU.- Unidades de Medición Inercial. Del inglés Inertial Measurement Units.
• PC.- Parálisis Cerebral.
• WM.- Movimientos serpenteantes. Del inglés Writhing Movements.

44
Anexos
Anexo A: Carta de Consentimiento
“2013, Año de la Lealtad Institucional y Centenario del Ejército Mexicano”
Carta de Consentimiento Informado
LA DIVISIÓN DE INVESTIGACIÓN TECNOLÓGICA DEL INSTITUTO NACIONAL DE REHABILITACIÓN LLEVA A CABO EL PROYECTO:
No solicitud - 182911
Sistema para Detección Temprana de Riesgo de Parálisis
Cerebral en Recién Nacidos y Lactantes Menores a
Través de Análisis de Movimiento
Registro INR: .
Cuyo objetivo es:
• El desarrollo de un sistema y una metodología que permita la descripción objetiva y cuantitativa de movimientos espontáneos del neonato y del lactante menor de forma no intrusiva. La metodología establecerá el riesgo de un neonato y lactante menor de presentar PC con base en parámetros de movimiento que reflejen los parámetros usados por los clínicos durante la valoración visual del movimiento del individuo.
Se justifica que se desarrolle este proyecto, ya que la Parálisis Cerebral (PC) constituye la primera causa de discapacidad en el infante secundaria a causas prenatales y perinatales principalmente como inadecuado control prenatal, asfixia perinatal y/o nacimiento prematuro. La detección temprana de alteraciones en el desarrollo neurológico puede ayudar a aconsejar a los padres y dirigir los servicios de intervención temprana.
El método de valoración de los movimientos generales (GM) permite intervenir mucho tiempo antes de que las características patológicas de la PC surjan. Si bien es cierto estas intervenciones no previenen el desarrollo de PC, sí pueden ayudar a prevenir complicaciones como contracturas y otras formas de inmovilidad. La terapia debe iniciar tan pronto como sea posible y las necesidades individuales del niño deben considerarse para minimizar los déficits físicos e intelectuales. Además el pronto apoyo psicológico para los padres y la adaptación para preservar la capacidad funcional del niño son cruciales.
Como puede verse para predecir en el largo plazo el resultado del desarrollo neurológico de los niños en riesgo es necesaria una combinación de herramientas que incluyan exámenes de desarrollo neurológico, estudios de imagen y estudios de fisiológicos.
Dirección de Investigación
“2013, Año de la Lealtad Institucional y Centenario del Ejército Mexicano”
Los estudios de imagen y fisiológicos son bastante objetivos sin embargo es necesario realizar más trabajo para brindar más objetividad a los exámenes de desarrollo neurológico. Por lo tanto es necesaria una herramienta objetiva, integral y practica que permita evaluar diferentes aspectos del neuro-desarrollo en el neonato y lactante menor.
Por el presente escrito, comunico que se me ha informado que su hijo/hija/pupilo (de ahora en adelante referido como el lactante menor) es candidato para participar en el proyecto arriba mencionado que consiste en desarrollar un sistema y una metodología que permita la descripción objetiva y cuantitativa de movimientos espontáneos del neonato y del lactante menor de forma no intrusiva. Así como, encontrar y extraer una combinación de parámetros del movimiento de los neonatos y lactantes menores que mejor describan las diferencias entre los participantes sin riesgo y en riesgo de presentar PC.
Se me ha informado que para participar en el proyecto es necesario medir en el lactante menor de forma semanal, los movimientos espontáneos durante al menos una hora utilizando sensores inerciales y marcadores ópticos, así como la grabación de video en cada una de las sesiones que forman parte del proyecto.
Se me ha informado que el programa consiste en traer al lactante menor al Laboratorio de Análisis de Movimiento una hora antes del estudio para darle su alimento. Después se le colocarán sensores y marcadores de movimiento en sus extremidades, tronco y cabeza utilizando cintas de tela suave, para poder realizar las mediciones durante una hora. Será necesario acudir a 2 sesiones en días consecutivos antes de las 7 semanas de edad del lactante menor y a 2 sesiones en días consecutivos antes de las 12 semanas de edad del lactante menor, dando un total de mínimo 4 sesiones. Durante estas sesiones el lactante menor será colocado en una zona de medición de madera, acostado boca arriba en una manta absorbente desechable nueva y una manta (de preferencia la propia).
También manifiesto que tengo pleno conocimiento de los riesgos a que está expuesto el lactante menor por el análisis de movimiento: irritabilidad y cansancio, irritación en la piel por los sensores y marcadores colocados, los cuales son poco frecuentes gracias al uso de materiales suaves y adecuaciones del área, pero existe la posibilidad de que se presenten.
“2013, Año de la Lealtad Institucional y Centenario del Ejército Mexicano”
El personal del INR me ha informado que el participar en este proyecto de investigación me ofrece el beneficio de recibir terapias de estimulación temprana para el lactante menor en caso de ser necesario, y mejorar nuestra calidad de vida al dar la oportunidad de minimizar los déficits físicos e intelectuales.
El personal del INR ha contestado de forma satisfactoria a mis preguntas e inquietudes, en relación al programa y los procedimientos de medición, sus beneficios, así como sus posibles complicaciones, y otros asuntos relacionados con esta investigación. Que se me informará sobre la condición de mi hijo(a) durante y al terminar este protocolo de investigación. Que su participación es DE RIESGO MÍNIMO, ANÓNIMA y CONFIDENCIAL, que todos los datos serán utilizados solo para investigación y que también se tomará material fotográfico y visual que será utilizado, para propósitos científicos y de enseñanza, siempre conservando la confidencialidad del lactante menor, por lo cual se harán todas las modificaciones necesarias para ocultar la identidad del lactante menor, por lo que acepto que no habrá remuneración alguna por el uso y publicación de los mismos. Que cualquier eventualidad relacionada con el protocolo de investigación será atendida por la Dra. Irma Tamara Arellano Martínez, médico adscrito a Rehabilitación Pediátrica del Instituto Nacional de Rehabilitación.
Se me ha informado que en cualquier momento puedo abandonar el estudio, sin perder los derechos como paciente del INR, y sin que con ello, se creen prejuicios y perjuicios para continuar su cuidado y tratamiento. Y se me ha aclarado que el lactante menor deberá asistir a un 80% de las sesiones para poder seguir incluido en el proyecto. En caso de que durante la participación en este protocolo, su médico tratante considere que está en riesgo su salud, el lactante menor será excluido del proyecto.
Por lo tanto, por mi propio derecho, en pleno uso de mis facultades y por mi libre decisión, de conformidad con lo dispuesto en los artículos 102 y 103 de la Ley General de Salud, acepto que mi hijo/hija/pupilo sea parte del protocolo de investigación arriba mencionado con números de registro ___________, otorgando la más amplia autorización que conforme derecho corresponde a efecto de que el personal médico de los Servicios de Rehabilitación Pediátrica y Análisis de Movimiento del Instituto Nacional de Rehabilitación realicen a mi hijo/hija/pupilo las evaluaciones pertinentes del protocolo y que fueron descritos anteriormente en esta carta de consentimiento informado.
México D.F. a ___________ de ________________del_____________________

“2013, Año de la Lealtad Institucional y Centenario del Ejército Mexicano”
Paciente Familiar y/o persona legalmente
responsable.
Nombre: Nombre:
Expediente número: Parentesco:
Dirección:
Teléfono:
Fecha de nacimiento:
Dirección:
Teléfono:
Identificación:
Nombre y Firma
Testigos:
Nombre: Nombre:
Parentesco:
Dirección:
Parentesco:
Dirección:
Teléfono:
Identificación:
Teléfono:
Identificación:
Nombre y Firma Nombre y Firma

“2013, Año de la Lealtad Institucional y Centenario del Ejército Mexicano”
Responsable del proyecto Persona que obtuvo el consentimiento
Nombre: Nombre:
Dirección: Dirección:
Teléfono:
Teléfono:
Nombre y Firma Nombre y Firma
Responsables del proyecto:
Por Investigación Tecnológica: Por Rehabilitación Pediátrica
M. en C. Ivett Quiñones
M. en C. A. Isaac Pérez
Ing. Lidia Núñez Carrera
Ing. Marlene Bourdón
Torre de Investigación, 7° Piso. Tel. 59 99 1000 x 19705, 19801.
Dra. María Elena Arellano Est.: 13504
Instituto Nacional de Rehabilitación Av. México Xochimilco 289 Col. Arenal de Guadalupe, Tlalpan, CP. 14389
FECHA DE MODIFICACIÓN: 26/11/2013


















