CINEMATICA DIRECTA E INVERSA DE UN ROBOT DE 4 GRADOS DE LIBERTAD
Upload
maria-dolores-estrella-lopezCategory
view
1.363download
6
Ingeniería de Sistemas y Automática
Control de Robots y Sistemas Sensoriales
TEMA 4: CINEMÁTICA DEL ROBOT
Robótica IndustrialRobótica IndustrialISA.- Ingeniería de Sistemas y Automática

Robotica Industrial- Cinemática del robot 1
Indice
➊ Introducción➋Morfología del robot➌Herramientas matemáticas para la localización espacial➍Cinemática del robot➎Dinámica del robot➏Control cinemático➐Control dinámico➑Programación de robots➒Criterios de implantación de un robot➓Aplicaciones de los robots

Robotica Industrial- Cinemática del robot 2
Cinemática del robot
Cinemática directa
Cinemática InversaMatriz Jacobiana

Robotica Industrial- Cinemática del robot 3
El problema cinemático de un robot
■ Cinemática del robot : Estudio de su movimiento con respecto a unsistema de referencia– Descripción analítica del movimiento espacial en función del tiempo
– Relaciones localización del extremo del robot-valores articulares
■ Problema cinemático directo: Determinar la posición y orientación delextremo final del robot, con respecto a un sistema de coordenadas de referencia,conocidos los ángulos de las articulaciones y los parámetros geométricos de loselementos del robot
■ Problema cinemático inverso: Determinar la configuración que debe adoptar elrobot para una posición y orientación del extremo conocidas
■ Modelo diferencial (matriz Jacobiana): Relaciones entre las velocidades demovimiento de las articulaciones y las del extremo del robot

Robotica Industrial- Cinemática del robot 4
Relación entre cinemática directa einversa
Valor de lascoordenadas
articulares(q1,q2,…,qn)
Posición yorientación del
extremo del robot(x,y,z,α,β,γ)
Cinemática Directa
Cinemática Inversa

Robotica Industrial- Cinemática del robot 5
Resolución del problema cinemático directo conmatrices de transformación homogéneas
■ Objetivo:
Encontrar una matriz de transformación homogénea T que relacioneposición y orientación del extremo del robot con respecto a un sistemade referencia fijo situado en su base
x q q q q q q
y q q q q q q
z q q q q q q
q q q q q q
q q q q q q
q q q q q q
= f
= f
= f
= f
= f
= f
x
y
z
( , , , , , )
( , , , , , )
( , , , , , )
( , , , , , )
( , , , , , )
( , , , , , )
1 2 3 4 5 6
1 2 3 4 5 6
1 2 3 4 5 6
1 2 3 4 5 6
1 2 3 4 5 6
1 2 3 4 5 6
αβγ
α
β
γ

Robotica Industrial- Cinemática del robot 6
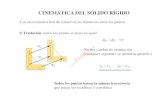
Modelo cinemático directo de unrobot planar de 2 gdl
( )( )
x
y
= l l
= l l1
1 1 2 1 2
1 2 1 2
cos cos
sen sen
q q q
q q q
+ +
+ +

Robotica Industrial- Cinemática del robot 7
Las matrices de transformaciónA y T
■ Matriz i-1Ai : matriz de transformación homogénea querepresenta la posición y orientación relativa entre lossistemas asociados a dos eslabones consecutivos del robot
■ Conexión de matrices A:
■ Matriz T : matriz 0An cuando se consideran todos losgrados de libertad del robot
03
01
12
23A A A A=
T A A A A A A A= =06
01
12
23
34
45
56

Robotica Industrial- Cinemática del robot 8
Convenio de conexión de elementoscontiguos de Denavit-Hartenberg
■ Transformaciones básicas de paso de eslabón:
❶Rotación alrededor del eje zi-1 un ángulo θi
❷Traslación a lo largo de zi-1 una distancia di ; vector di (0,0,di)
❸Traslación a lo largo de xi una distancia ai ; vector ai (0,0,ai)
❹Rotación alrededor del eje xi un ángulo αii-1
i i i i i ( , ) (0,0,d (a ,0,0 ( ,A T z T T T x= θ α) ) )
i 1i
i i
i i
i
i
i i
i i
C S 0 0
S C 0 0
0 0 1 0
0 0 0 1
0
0
1 d
0 1
a
0
0
1
1 0 0
0 C -S 0
0 S C 0
0 0 1
− =
−
=
=
−
A
θ θθ θ α α
α α
θ α θ α
1 0 0
0 1 0
0 0
0 0
1 0 0
0 1 0
0 0 1
0 0 0
0
0
C C S Si i i i S a C
S C C S C a S
S C d
i i i
i i i i i i i
i i i
θ θθ α θ α θ θ
α α−
0
0 0 0 1

Robotica Industrial- Cinemática del robot 9
Parámetros deDenavit-Hartenberg (I)
■ Definen el paso de un sistema de referencia asociado a unaarticulación al siguiente
■ Sólo dependen de las características geométricas de cadaeslabón y de las articulaciones que le unen con el anterior ysiguiente (no dependen de la posición del robot)
■ Definen las matrices A que permiten el paso de un sistemade referencia asociado a una articulación al siguiente y portanto definen las matrices T
■ Son 4:– Dos ángulos (θi, αi)
– Dos distancias (di, ai)

Robotica Industrial- Cinemática del robot 10
Parámetros deDenavit-Hartenberg (II)
■ θi: Es el ángulo que forman los ejes xi-1 y xi medido en un planoperpendicular al eje zi-1, utilizando la regla de la mano derecha. Se tratade un parámetro variable en articulaciones giratorias.
■ di: Es la distancia a lo largo del eje zi-1 desde el origen del sistemade coordenadas (i-1)-ésimo hasta la intersección del eje zi-1 con el ejexi. Se trata de un parámetro variable en articulaciones prismáticas.
■ ai: Es la distancia a lo largo del eje xi que va desde la interseccióndel eje zi-1 con el eje xi hasta el origen del sistema i-ésimo, en el casode articulaciones giratorias. En el caso de articulaciones prismáticas, secalcula como la distancia más corta entre los ejes zi-1 y zi.
■ αi: Es el ángulo de separación del eje zi-1 y el eje zi, medido en unplano perpendicular al eje xi, utilizando la regla de la mano derecha.

Robotica Industrial- Cinemática del robot 11
Parámetros de Denavit-Hartenbergpara un eslabón giratorio

Robotica Industrial- Cinemática del robot 12
Obtención del modelocinemático directo de un robot
❶Establecer para cada elemento del robot un sistema decoordenadas cartesiano ortonormal (xi,yi,zi) dondei=1,2,…,n (n=número de gdl). Cada sistema decoordenadas corresponderá a la articulación i+1 y estaráfijo en el elemento i
❷Encontrar los parámetros D-H de cada una de lasarticulaciones
❸Calcular las matrices Ai
❹Calcular la matriz Tn = 0A1 1A2 ... n-1An

Robotica Industrial- Cinemática del robot 13
Algoritmo de Denavit-Hartenberg (I)
■ D-H 1.- Numerar los eslabones comenzando con 1 (primer eslabón móvilde la cadena) y acabando con n (último eslabón móvil). Se numerarácomo eslabón 0 a la base fija del robot.
■ D-H 2.- Numerar cada articulación comenzando por 1 (lacorrespondiente al primer grado de libertad) y acabando en n
■ D-H 3.- Localizar el eje de cada articulación. Si ésta es rotativa, el ejeserá su propio eje de giro. Si es prismática, será el eje a lo largo del cualse produce el desplazamiento.
■ D-H 4.- Para i de 0 a n-1 situar el eje zi sobre el eje de la articulación i+1.
■ D-H 5.- Situar el origen del sistema de la base {S0} en cualquier puntodel eje z0. Los ejes x0 e y0 se situarán de modo que formen un sistemadextrógiro con z0

Robotica Industrial- Cinemática del robot 14
Algoritmo de Denavit-Hartenberg (II)
■ D-H 6.- Para i de 1 a n-1, situar el sistema {Si} (solidario al eslabón i) enla intersección del eje zi con la línea normal común a zi-1 y zi. Si ambosejes se cortasen se situaría {Si} en el punto de corte. Si fuesen paralelos{Si} se situaría en la articulación i+1
■ D-H 7.- Situar xi en la línea normal común a zi-1 y zi
■ D-H 8.- Situar yi de modo que forme un sistema dextrógiro con xi y zi .
■ D-H 9.- Situar el sistema {Sn} en el extremo del robot de modo que zncoincida con la dirección de zn-1 y xn sea normal a zn-1 y zn .
■ D-H 10.- Obtener θi como el ángulo que hay que girar en torno a zi-1 paraque xi-1 y xi queden paralelos.
■ D-H 11.- Obtener di como la distancia, medida a lo largo de zi-1, quehabría que desplazar {Si-1} para que xi y xi-1 quedasen alineados.

Robotica Industrial- Cinemática del robot 15
Algoritmo de Denavit-Hartenberg (III)
■ DH 12.- Obtener ai como la distancia medida a lo largo de xi (queahora coincidiría con xi-1) que habría que desplazar el nuevo {Si-1}para que su origen coincidiese con {Si}.
■ DH 13.- Obtener αi como el ángulo que habría que girar entorno a xi
(que ahora coincidiría con xi-1), para que el nuevo {Si-1} coincidiesetotalmente con {Si}.
■ DH 14.- Obtener las matrices de transformación i-1A i
■ DH 15.- Obtener la matriz de transformación entre la base y el extremodel robot T = 0A1 1A2 ... n-1An.
■ DH 16.- La matriz T define la orientación (submatriz de rotación) yposición (submatriz de traslación) del extremo referido a la base enfunción de las n coordenadas articulares

Robotica Industrial- Cinemática del robot 16
Modelo cinemático directo de unrobot cilíndrico (I)
Articulación θ d a α1 q1 l1 0 0
2 90º d2 0 90º
3 0 d3 0 0
4 q4 l4 0 0

Robotica Industrial- Cinemática del robot 17
Modelo cinemático directo de unrobot cilíndrico (II)
0
1 1
1 1
1
1
2
3
3
4 4
4 4
4
0 0
0 0
0 0 1
0 0 0 1
0
1 0 0 0
0 1 0 0
0 0 1
0 0 0 1
0 0
0 0
0 0 1
0 0 0 1
A A
A A
1 22
3 4
0 0 1 0
1 0 0
0 1 0 d
0 0 0 1
=
−
=
=
=
−
C S
S C
l
d
C S
S C
l
T A A A A= =
− +− +
+
0 1 2 3
1 4 1 4 1 1 3 4
1 4 1 4 1 1 3 4
4 4 2 10
0 0 0 1
1 2 3 4
S C S S C C d l
C C C S S S d l
S C d l
( )
( )

Robotica Industrial- Cinemática del robot 18
Modelo cinemático directo de unrobot ABB IRB 6400C (I)
Articulación θ d a α1 θ1 0 0 -902 θ2 l1 0 903 θ3-90 0 -l2 904 θ4 l3 0 -905 θ5 0 0 906 θ6 l4 0 0

Robotica Industrial- Cinemática del robot 19
Modelo cinemático directo de unrobot ABB IRB 6400C (II)
0
1 1
1 1 1
2
3 3 2 3
3 3 2 3 3
4 4
4 4
3
0 0
0 0
0 1 0 0
0 0 0 1
0
0
0 1 0 0
0 0 0 1
0 0
0 0
0 1 0
0 0 0 1
A A
A A
1 2
2 2
2 2
1
3 4
C 0 S 0
S 0 C 0
0 1 0 l
0 0 0 1
=
−
−
=−
=
− −− −
=
−
−
C S
S C
S C l S
C S l C
C S
S C
l
45
5 5
5 5 56
6 6
6 6
4
0 0
0 0
0 1 0 0
0 0 0 1
0 0
0 0
0 0 1
0 0 0 1
A A=−
=
−
C S
S C
C S
S C
l

Robotica Industrial- Cinemática del robot 20
Modelo cinemático directo de unrobot ABB IRB 6400C (III)
T A A A A A A= =
0 1 2 3 4 51 2 3 4 5 6
x x x x
y y y y
z z z z
0 0 0 1
n o a p
n o a p
n o a p
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( )
n
n
n
x 1 2
y 1 2
z 2
= C C
= S C
= S
S S C C C C S S C S S C C C S C C C S S S C
S S C C C C S S S S S C C C S S C C C S S C
S C C C S S C S C C C
3 1 3 4 5 6 4 6 1 2 4 5 6 4 6 1 2 3 1 3 5 6
3 1 3 4 5 6 4 6 1 2 4 5 6 4 6 1 2 3 1 3 5 6
3 4 5 6 4 6 2 4 5 6
+ − + + + − +
− + − + + + − −
− − + +( )( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( )( )
4 6 2 3 5 6
3 1 3 4 5 6 4 6 1 2 4 5 6 4 6 1 2 3 1 3 5 6
3 1 3 4 5 6 4 6 1 2 4 5 6 4 6 1 2 3 1 3 5 6
3 4
S S C S C
S S C C C C S S C S S C C C S C C C S S S C
S S C C C C S S S S S C C C S S C C C S S C
S C C
+
+ − − + − + + − + −
− + − − + − + + − − −
− −
x 1 2
y 1 2
z 2
= C C
= S C
= S
o
o
o ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( )
5 6 4 6 2 4 5 6 4 6 2 3 5 6
3 1 3 4 4 5 1 2 4 4 5 3 1 3 4 5 3
2 1 2 3 2 1 3 1 1
3 1 3 4 4 5 1 2 4 4 5
C S S C S C C C S S C S C
S S C l C S C S l S S C S S l C l
l C C S l S C l S
S C C l C S S S l S S
− + − + + −
+ + + + − + +
− − −
− − + + −
x 1 2 1 2
y 1 2 1
= C C C C
= S C
p
p ( ) ( )( )
( ) ( ) ( ) ( )
C C
= -S
2
z 2
C C S l C l
l S C S l C C l C
S l C C C l S S S C l C l l S S
3 1 3 4 5 3
2 1 2 3 2 1 3 1 1
3 4 4 5 2 4 4 5 2 3 4 5 3 2 2 3
− − + +
− − +
+ + − + +p

Robotica Industrial- Cinemática del robot 21
Cinemática Inversa
■ Objetivo: encontrar los valores que deben adoptar lascoordenadas articulares del robot para que su extremo seposicione y oriente según una determinada localización espacial
■ La resolución no es sistemática
■ Depende de la configuración del robot (soluciones múltiples)
■ No siempre existe solución en forma cerrada.
– Condiciones suficientes para que exista:✜ Tres ejes de articulación adyacentes interseccionan en un punto
(robot PUMA y robot Stanford)
✜ Tres ejes de articulación adyacentes son paralelos entre sí(robot Elbow)

Robotica Industrial- Cinemática del robot 22
Posibilidades de solución delproblema cinemático inverso
❶ Procedimiento genérico a partir de los parámetros D-H✜ Método iterativo
✜ Problemas de velocidad y convergencia
❷ Búsqueda de solución cerrada: qk = fk (x,y,z,α,β,γ); k = 1,…,n
✜ Posibilidad de resolución en tiempo real
✜ Posibilidad de selección de la solución más adecuada
✜ Posibilidad de simplificaciones
✜ No siempre es posible

Robotica Industrial- Cinemática del robot 23
Métodos de solución delproblema cinemático inverso
❶ Métodos geométricos
– Se suele utilizar para las primeras variables articulares
– Uso de relaciones geométricas y trigonométricas (resolución detriángulos)
❷ Resolución a partir de las matrices de transformaciónhomogénea– Despejar las n variables qi en función de las componentes de los
vectores n, o, a y p.
❸ Desacoplamiento cinemático
– En robots de 6 GDL
– Separación de orientación y posicionamiento
❹ Otros: álgebra de tornillo,cuaterniones duales,métodos iterativos...

Robotica Industrial- Cinemática del robot 24
Ejemplo de resolución de la cinemáticainversa por métodos geométricos (I)
qp
p1 =
arctg y
x
r
r l l l l cos
cosl l
l l
x2
y2
z2
22
32
2 3 3
3
x2
y2
z2
22
32
2 3
2
2 2
2
= +
+ = + +
⇒
=+ + − −
p p
p
p p p
q
q
sen cos2q q3 31= ± −
q
qp p p
3
231
2
=± −
=+ + − −
arctgcos
cos
con cos l l
l l
3
3
x2
y2
z2
22
32
2 3

Robotica Industrial- Cinemática del robot 25
Ejemplo de resolución de la cinemáticainversa por métodos geométricos (II)
q2 = −β α
β
α
=
=
± +
=+
arctg
arctg
pg
p
p p
q
q
z z
x2
y2
3 3
2 3 3
rarct
l sen
l l cos
qp
p p os q2 =± +
−
+
arctg arctgz
x2
y2
3 3
2 3 3
l sen q
l l c

Robotica Industrial- Cinemática del robot 26
Ejemplo de resolución de la cinemática inversa a partirde las matrices de transformación homogénea (I)
A r t i c . θ d a α1 q 1 l 1 0 9 0 º2 q 2 0 0 - 9 0 º3 0 q 3 0 0
01
1 1
1 1
1
12
2 2
2 2 23
3
02
1 2 1 1 2
1 2 1 1 2
2 2 1
0 0
0 0
0 1 0
0 0 0 1
0 0
0 0
0 1 0 0
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1
0 0 0 1
0
0
0
0 0 0 1
A A A
A
=−
=
−
−
=
=
− −−
C S
S C
l
C S
S C
q
C C S C S
S C C S S
S C l
= =
− − −− −
+
T A03
1 2 1 1 2 3 1 2
1 2 1 1 2 3 1 2
2 2 3 2 10
0 0 0 1
C C S C S q C S
S C C S S q S S
S C q C l

Robotica Industrial- Cinemática del robot 27
Ejemplo de resolución de la cinemática inversa a partirde las matrices de transformación homogénea (II)
( )( ) ( )
T A A A
A T A A
A A T A
=
=
=
−
− −
011
22
3
01
1 12
23
12
1 01
1 23
( )01
103
12
23
3
0 0 0 1
1 0 0 0
0 1 0 0
0 0 1
0 0 0 1
A T A A−
= =−
−
=
=
−
−
C S 0 0
0 0 1 l
S C 0 0
0 0 0 1
C 0 S 0
S 0 C 0
0 1 0 0
0 0 0 1
1 1
1
1 1
x x x x
y y y y
z z z z
2 2
2 2
n o a p
n o a p
n o a p
q
=
− −
−
C 0 S S
S 0 C C
0 1 0 0
0 0 0 1
2 2 2 3
2 2 2 3
q
q
S C tanx y 1y
x1 1 0p p q
p
p− = ⇒ =
⇒( )
`q
p
p1 =
arctan
y
x
`
qp p
p
q p p p
2
x2
y2
1 z
3 2 z 1 2 x2
y2
arctanl
C ( l ) S
=+
−
= − − +

Robotica Industrial- Cinemática del robot 28
Matriz Jacobiana
Velocidadde las
articulaciones(q1,q2,…,qn)
velocidades del extremo
del robot(x,y,z,α,β,γ)
Jacobiana Directa
Jacobiana Inversa
Matriz Jacobiana: permite conocer las velocidades del extremodel robot a partir de las velocidades de cada articulación

Robotica Industrial- Cinemática del robot 29
Relaciones diferenciales
x q q y q q z q q
q q q q q q
= = =
= = =
f ( , ) f ( , , ) f ( , )
f ( , , ) f ( , , ) f ( , )x 1 n y 1 n z 1 n
1 n 1 n 1 n
� � �
� � �
, ,
,α β γα β γ
� � � � � �
� � � � � �
xq
q yq
q zq
q
= = =
= = =
∑ ∑ ∑
∑ ∑ ∑
∂∂
∂∂
∂∂
α∂∂
β∂∂
γ∂∂
α β γ
f
f
f
f
f
f
x
i1
n
iy
i1
n
iz
i1
n
i
i1
n
ii1
n
ii1
n
i
�
�
�
�
�
�
�
�
x
y
z
q
q
q q
q q
αβγ
∂∂
∂∂
∂∂
∂∂
γ γ
= ⋅
=
J J
1
1
1
�
�
�
� � �
�n
x x
n
n
con
f f
f f

Robotica Industrial- Cinemática del robot 30
Jacobiana de un robot SCARA
x
y
z q
= += += −
l C l C
l S l S
l
3 12 2 1
3 12 2 1
1 3
( )�
�
�
�
�
�
x
y
z
q
q
q
=− + −
+−
l S l S l S 0
l C l C l C 0
0 0 1
3 12 2 1 3 12
3 12 2 1 3 12
1
2
3

Robotica Industrial- Cinemática del robot 31
Métodos de cálculo de laJacobiana inversa
■ Inversión simbólica de la matriz jacobiana– Gran complejidad (matriz 6x6)
■ Evaluación numérica de J e inversión numérica– Necesidad de recómputo continuo
– En ocasiones J no es cuadrada matriz pseudoinversa
– En ocasiones | J | = 0
■ A partir del modelo cinemático inverso
q x y z
q x y zn n
1 1=
=
f
f
( , , , , , )
( , , , , , )
α β γ
α β γ�
�
�
�
�
q
q
x
n
1
1
�
�
�
�
�
�
=
−J
γ
J− =
1
∂∂
∂∂γ
∂∂
∂∂γ
f f
f f
1 1
n n
x
x
� � �
� � �
� � �
� � �
� � �

Robotica Industrial- Cinemática del robot 32
Configuraciones singulares
■ Aquellas en las que | J | = 0 (Jacobiano nulo)
■ Incremento infinitesimal coordenadas cartesianas implicaincremento infinito coordenadas articulares
■ Implica pérdida de algún grado de libertad
■ Tipos– Singularidades en los límites del espacio de trabajo del robot
– Singularidades en el interior del espacio de trabajo del robot
■ Requieren su estudio y eliminación