Controlador con Red Neuronal Inversa
5
UNIVERSIDAD DE LAS FUERZAS ARMADAS -ESPE INTEGRANTES: EVELYN LEMA DAYANA OCHOA CARLOS MENDOZA
-
Upload
evelyn-gabriela-lema-vinueza -
Category
Education
-
view
78 -
download
1
Transcript of Controlador con Red Neuronal Inversa

UNIVERSIDAD DE LAS FUERZAS
ARMADAS -ESPE
INTEGRANTES:
EVELYN LEMA
DAYANA OCHOA
CARLOS MENDOZA

Caracterizar un controladorcon red neuronal inversa• El control por modelo inverso es una técnica, que busca
cancelar la dinámica de la planta al colocar un elemento encascada con ella, en este caso una red neuronal, siendo esteuna aproximación matemática del inverso de la planta. De estamanera se busca que la salida sea lo más parecida posible a lareferencia.
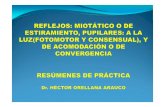
• Existen dos tendencias cuando se realiza control neuronal pormodelo inverso, la primera es la conocida comoentrenamiento general en el cual la red neuronal usandodatos obtenidos con anterioridad encuentra el modelo inversode la planta. Cuando la red neuronal ha sido entrenada sepuede usar como controlador pues ella cancela la dinámica dela planta como se observa en la figura.


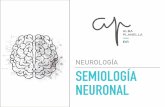
• Las salidas de la planta se constituyen en las entradas delmodelo y la señal de control dada por la ley de control seconsidera el objetivo de aprendizaje para la red neuronalartificial; una representación típica del modelo inverso deaprendizaje para redes neuronales y controladoresinteligentes, es la que se observa en la figura.

Bibliografía
• http://noticias.espe.edu.ec/jscordova/files/2012/07/Tanque.pdf
• http://arxiv.org/ftp/arxiv/papers/1111/1111.4267.pdf