1. Introduccion a Las Energias Renovables y Sistemas Hibridos - Uniajc 2014 2

of 12
Upload
ramon-lopezCategory
view
1.077download
11MODELADO DE SISTEMAS HIBRIDOSDINAMICA DE SISTEMASEN ESTE TRABAJO SE INTENTAR EXPLICAR LA MANERA EN QUE TRABAJAN ESTE TIPO DE SISTEMAS Y LA FORMA DE PLANTEARLOS MATEMATICAMENTE PARA LLEGAR A SU FUNCION DE TRANSFERENCIA. RAMON AMISADAI LOPEZ ROSAS 05/01/2012
INTRODUCCION
Debido a que es difcil encontrar en la realidad sistemas puramente elctricos, mecnicos, hidrulicos o trmicos, desde un punto de vista estricto, es necesario realizar un estudio detallado de los sistemas hbridos, que son aquellos sistemas formados por la combinacin de subsistemas de distinto tipo, por ejemplo electromecnicos, termoelctricos y otros. Para enfatizar la importancia que tienen los sistemas hbridos se pueden citar ejemplos sencillos y analizar de manera breve sus diferentes partes o subsistemas. Considrese el caso de un automvil, el cual puede ser tratado como una serie de subsistemas interconectados que interactan de manera conjunta. En trminos generales todo automvil considerado como un sistema fsico tiene un subsistema o parte elctrica formado por las luces, sistema de encendido, tablero de control el cual incluye alarmas e indicadores, etc. A continuacin se presenta la descripcin de algunos elementos hbridos y adems ejemplos de sistemas que incluyen elementos de este tipo.
DESARROLLOUn modelamiento de sistemas u obtencin del modelo matemtico del sistema, independientemente de su naturaleza, sigue una secuencia de 4 pasos: Definicin de las variables a considerar como de entrada y salida para lo cual se requiere un conocimiento cabal de los procesos al interior del sistema. Formulacin de los justificativos tericos (suposiciones) que reduzca la complejidad del modelo. Definicin de ecuaciones de equilibrio Resolucin del sistema de ecuaciones obtenidas
Entre los elementos hbridos se pueden citar como los ms comunes por su simplicidad y uso frecuente los siguientes: Potencimetro ste elemento hibrido relaciona dos variables, una elctrica con una mecnica. Existen dos tipos de potencimetros: Traslacional Rotacional TRASLACIONAL:El potencimetro traslacional se representa por medio del siguiente smbolo:
Su comportamiento fsico est definido por la ecuacin:
Dnde:V0= es el voltaje medido entre la posicin del cursor y la referencia, la posicin del cursor est determinada por el valor del desplazamiento (x), ste voltaje esta dado env. X= desplazamiento del cursor en m. xmax= valor mximo que desplaza el cursor en m. v= voltaje de alimentacin al potencimetro en [v].
ROTACIONAL:ste potencimetro se representa por medio del siguiente smbolo:
Su comportamiento fsico est definido por la ecuacin:
Dnde:V0= es el voltaje medido entre la posicin del cursor y la referencia, la posicin del cursor est determinada por el valor del desplazamiento angular () este voltaje esta dado en v. = Desplazamiento angular del cursor del potencimetro en rad. max= Valor mximo que se desplaza angularmente el cursor en rad. V: es el voltaje de alimentacin aplicado entre las terminales del potencimetro [v].
Motor elctrico ideal de corriente directaEn este elemento son cuatro las variables asociadas: dos elctricas y dos mecnicas. Las elctricas son el voltaje y corriente de armadura, las mecnicas son el par producido en la flecha del motor y la velocidad angular de este. El motor elctrico ideal de corriente directa se representa mediante el siguiente smbolo:
La relacin entre las variables se define por medio de las ecuaciones:
Dnde:Tm y m:son el par producido por el motor y su velocidad angular, expresados N-m y en rad/seg respectivamente. Va e ia: son el voltaje y corriente de armadura del motor expresados en V y A respectivamente. Ka y Kf: son parmetros propios del motor expresados en respectivamente y
Un generador elctrico es una maquina elctrica capaz de mantener una diferencia de potencial elctrico entre dos de sus puntos, llamados polos, terminales o bornes. Los generadores elctricos son destinados a transformar la energia mecnica en elctrica. Esta transformacin se consigue a travs de una fuerza electromotriz (fem), de acuerdo a los principios de Lenz y Faraday.
Por su naturaleza el generados recibe energa mecnica a travs del rotos y entrega energa elctrica a travs de los rodamientos. En los generadores reales, la velocidad de rotacin se mantiene constante, y lo que se regula es la intensidad del campo magntico de excitacin, a travs de la variacin del voltaje a la bobina del estator. De esta forma la variable de entrada ser el voltaje de la bobina de excitacin vb(t) y la variable de salida ser el voltaje v(t) en los extremos de los rodamientos. Ahora introduciremos suposiciones cuyo objetivo bsico es limitar o minimizar tericamente la influencia de los elementos no lineales del sistema. As para un generador de CD es importante pensar que: No existe histresis magntica en los circuitos magnticos. La relacin entre flujo magntico y fuerza de imantacin es lineal.
La relacin del armado del rotor esta compensada La induccin en la bobina del rotor es nula Los parmetros elctricos de los embobinados son constantes en el tiempo La carga del generador es pasiva pura La velocidad de rotacin del rotor es constante
A continuacin obtendremos las ecuaciones de equilibrio. De acuerdo al principio bsico de la conservacin de la energa, la energa solo se transforma. Una ecuacin de equilibrio es una expresin matemtica que describe esa transformacin.
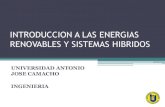
EJEMPLOSEl sistema electromecnico que se muestra en la figura se puede considerar como la representacin ms simple de un generador de corriente directa. La parte elctrica representa el sistema de arranque del motor y la parte mecnica representa la inercia de ste.
Obtener un modelo matemtico que sirva para representar el comportamiento del sistema, empleando como variable para el modelo la velocidad angular. SOLUCION: En este caso es necesario en primer trmino identificar y delimitar cada una de las partes que forman el sistema esto se hace con la finalidad de plantear las ecuaciones de elementos y las de equilibrio por separado para cada una de las partes. De esta manera para el sistema considerado, se pueden identificar una parte elctrica formada por la fuente de alimentacin, una resistencia y una inductancia; otra parte del sistema es la mecnica que est formada por un resorte rotacional (KT), una inercia (Jm) y un amortiguador rotacional (m). Ambas partes estn interconectadas atraves de un elemento hibrido (motor elctrico ideal de corriente directa). 1. Seleccin de variables.
Leyes de elementos. Debido a que el sistema est formado por una parte elctrica y una mecnica se deben plantear las ecuaciones de elementos para cada una de las partes por separado. Subsistema magntico Una de las partes ms importantes del motor, el devanado de inducido, consiste en un arrollamiento de varias espiras que puede girar inmerso en un campo magntico constante. Dicho campo magntico puede ser generado por un imn permanente o por un devanado de excitacin consistente en una bobina por la que circula una corriente de excitacin if(t), que supondremos constante para que el campo sea tambin constante. Al circular una corriente ia(t) por el devanado de inducido, como resultado de la interaccin con el campo magntico se ejerce sobre l un par T(t) que es directamente proporcional al campo magntico y a la propia corriente de inducido ia(t). Dado que hemos supuesto el campo magntico constante, el par motor ser proporcional a la corriente de inducido T(t) = Kt.ia(t) (1)
Por otra parte, el giro de las espiras del devanado de inducido en presencia del campo magntico, produce en bornas del mismo una cada de tensin o fuerza contraelectromotriz, e(t), proporcional a su velocidad de giro
Subsistema elctrico Asimismo, el devanado de inducido es, a todos los efectos, un conductor, con una resistencia Ra y una inductancia La, sobre el que hay
que considerar, adems, la fuerza contraelectromotriz como una fuente de tensin dependiente de la velocidad de giro. La ecuacin en la malla de inducido ser, por tanto: (3) Aplicando la transformada de Laplace a la ecuacin elctrica se tiene: Va(s) = (Ra + sLa)Ia(s) + Kesm(s) Subsistema mecnico El par mecnico T(t) desarrollado por el motor se emplea para imprimir aceleracin angular a la carga y en vencer la fuerza de friccin
(la friccin viscosa es aproximadamente proporcional a la velocidad de giro): (5) Aplicando la transformada de Laplace a la ecuacin anterior y teniendo en cuenta que la velocidad angular m(s) = sm(s) se tiene:
Funcin de transferencia Agrupando trminos, la funcin de transferencia que relaciona la tensin de inducido con la posicin angular es:
Anexos y referencias Franklin et al. Feedback Control of Dynamic Systems 5 Edicin, Ed. Prentice Hall. http://isa.uniovi.es/ISAwiki/index.php/Modelado_de_un_motor_ CC. Francisco J. Rodrguez Ramrez Dinmica de sistemas 1 Edicin, Ed.