Robotica
14
SEGUIDOR DE LINEA ROBOTICA INTEGRANTES: Paola Jacqueline Mamani Torrez Nilda Rebeca Chuquichambi Paxi Vanessa Mamani Aruhiza PARALELO: 4to “A” DOCENTE: Ing. Guillermo Martin Uría Ovando Universidad Pública y Autónoma de El Alto UPEA INGENIERÍA DE SISTEMAS ELECTRONICA BASICA 2014 http://electronicaupea.blogspot.co m/
-
Upload
nilda-rebeca-chuquichambi -
Category
Engineering
-
view
397 -
download
5
Transcript of Robotica

S E G U I D O R D E L I N E A Página 1
ROBOTICA
INTEGRANTES:
Paola Jacqueline Mamani Torrez
Nilda Rebeca Chuquichambi Paxi
Vanessa Mamani Aruhiza
PARALELO: 4to “A”
DOCENTE: Ing. Guillermo Martin Uría Ovando
Universidad Pública y Autónoma de El AltoUPEA
INGENIERÍA DE SISTEMAS
ELECTRONICA BASICA
2014http://electronicaupea.blogspot.com/

S E G U I D O R D E L I N E A Página 2
ROBOTICA
Seguidor de Línea
OBJETIVOS:
Al comenzar el proyecto hay que tener unos objetivos fijos para lograr tener u
mayor aprendizaje y son:
a. Construir un robot seguidor de línea, que funcione mediante sensores
usando componentes básicos de electrónica.
b. Obtener un seguidor de línea que siga un camino marcado con líneas
usando solo compuertas lógicas.
c. Conocer más acerca de la robótica, así como analizar las ventajas y
desventajas de los robots, un concepto, las leyes de la robótica, etc.
1. RESUMEN:
En el presente informe se describe el procedimiento que se llevó a cabo para
el diseño y montaje de un carrito seguidor de línea, con todas sus
partes, la elección de sus componentes para su respectivo armado de los
mismos dispositivos utilizados.
También se dará a conocer los materiales para crear un seguidor de línea el
cual es un carro que sigue un alinea que se distingue del entorno y los objetivos
o metas que queremos llegar al terminar este proyecto.
2. INTRODUCCIÓN:
La robótica y la electrónica son áreas importantes en la historia del planeta ya
que en todos los campos nos permite crear una cantidad ilimitada de
aplicaciones prácticas.
En el caso de los seguidores de línea nos permite aproximarnos a la
programación y aplicar la teoría obtenida en clase.
En la electrónica una de las más importantes e interesantes áreas es la de la
ROBÓTICA porque hoy en día tiene una aplicación en casi todos los campos,
porque permite crear una cantidad ilimitada de modelos al igual que una
ilimitada de aplicaciones prácticas. Se puede utilizar en el hogar, en el colegio,

S E G U I D O R D E L I N E A Página 3
en la industria, en el comercio, en la investigación, en fin, en todos los campos
del conocimiento y del quehacer humano puede caber una aplicación de la
robótica.
3. MATERIAL Y METODOS
Materiales:
2 Motores dc con caja de reducción 3 Sensores infla rojos Qrd1114 3 resistencias de 330 ohmios,3 de 10 k,1 resistencia de 1 k 1 puente h L293 2 Baterías 9v lm7805 capacitores de 2 capacidad de 100uf 25v 2 7404 negadora Placa 1cristal 4mhz 2 capacitores de 22pf Ruedas Voltímetros Un CD

S E G U I D O R D E L I N E A Página 4
a) Descripción:
El diseño es súper simple para montar un rastreador de líneas básico con
sensores CNY70 y componentes electrónicos.
En el esquema mostrado se puede apreciar cómo funciona el circuito, el ledemisor del sensor CNY70 se alimenta a través de una resistencia R1 de 680 Ω,
cuando una superficie reflectante como el color blanco de la superficie por
donde se moverá el rastreador, refleja la luz del led emisor, el fototransistor
contenido en el sensor CNY70 baja su resistencia interna entre Colector y
Emisor con lo cual conduce la corriente que hace que también entre en
conducción el transistor Q1 que estaba polarizado a masa por medio de la

S E G U I D O R D E L I N E A Página 5
resistencia R2 de 10 KΩ. Q2 sirve para invertir la señal para que de este modo
se desactive el motor cuando ve blanco y se ponga en marcha cuando ve negro
el sensor, con lo que al activarse Q1 hace que se active Q2 cortando a Q3 con
él, ya que este último estaba activo porque esta polarizado por R3, con lo cual
lo que ha pasado es que la salida del motor se ha desactivado cuando el sensor
a detectado una superficie reflectante, en estado de reposo la salida estará
siempre activa y Q3 conduciendo. Los 2 circuitos se pueden alimentar con 4
pilas normales de 1,5V puestas en serie con lo que se obtienen 6V, dependerá
del consumo de los motores elegir pilas o baterías más potentes.
b) Procedimiento
Montaje: El robot se compondrá de un circuito que podremos hacer fácilmente
con una placa de topos o de prototipos o usando los fotolitos expuestos y este
tendrá dos circuitos exactamente iguales uno para cada sensor-motor e irán
cruzados con lo que el sensor izquierdo actuara sobre el motor derecho y el
sensor derecho sobre el motor izquierdo tal como se muestra en la ilustración.
Los motores tienen que ser de corriente continua para eso hay que fabricar una
reductora si no disponen de ella para mover las ruedas, porque más grandes
sean las ruedas, más velocidad alcanzara el robot, aunque no hay que pasarse
con el diámetro de estas porque si no en las curvas se saldrá de trayectoria,
unos 6 cm. es lo ideal, para el robot.
Los sensores irán dispuestos mirando al suelo y a unos 2 o 3 mm de separación
desde el suelo a la superficie del sensor y la separación entre ambos sensores

S E G U I D O R D E L I N E A Página 6
será para que quede dentro de la línea negra que vayamos a usar como
trayectoria. En el montaje se utilizara dos servos trucados de manera que
queden solo los motores CC con la reductora, es decir, sin circuito de control
pero se puede usar cualquier motor de CC de unos 5 o 6 voltios y que no
consuma demasiado para que no se agoten las pilas o baterías demasiado
rápido.
El trazado lo podremos hacer sobre una cartulina blanca y para trazar las líneas
usar cinta aislante negra, tener cuidado en no hacer curvas demasiado cerradas
ya que si el robot es muy veloz (ruedas grandes) se saldrá de la trayectoria por
inercia y al sacar los 2 sensores fuera de la línea no volverá a entrar.
Funcionamiento: Pondremos el robot en la superficie de fondo blanca y lo
alimentaremos, como los dos sensores están activos los motores permanecerán
parados, ahora empujaremos el robot hasta la línea de trayectoria negra, al
entrar uno de los sensores con la línea negra este hará que el motor del lago
contrario empiece a funcionar con lo que el robot entrara por si solo en la
trayectoria, cuando tenga los dos sensores viendo negro los 2 motores estarán
en marcha con lo que el robot avanzara en línea recta, ahora bien si él llega a
una curva y supongamos que el sensor izquierdo sale de la línea negra
entonces provocara que el motor del lado contrario (motor derecho) se
desactiva con lo cual el robot girara a derecha (como un tanque) entrando de
este modo en la línea negra otra vez o el caso contrario pasa lo mismo pero
con el otro motor y sensor.
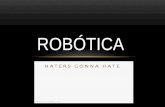
4. DISEÑO DEL CIRCUITO

S E G U I D O R D E L I N E A Página 7
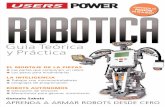
5. ANEXOS
ROBOT (SEGUIDOR DE LINEA)

S E G U I D O R D E L I N E A Página 8
6. MARCO TEORICO
a) ELECTRONICA
Es el campo de la ingeniería y de la física aplicada relativo al diseño y
aplicación de dispositivos, por lo general circuitos electrónicos, cuyo
funcionamiento depende del flujo de electrones para la generación, transmisión,
recepción, almacenamiento de información, entre otros. Esta información puede
consistir en voz o música como en un receptor de radio, en una imagen en una
pantalla de televisión, o en números u otros datos en un ordenador o
computadora.
b) ROBOTICA.
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño,
manufactura y aplicaciones de los robots. La robótica combina diversos
disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia
artificial y la ingeniería de control.

S E G U I D O R D E L I N E A Página 9
c) LEYES DE LA ROBOTICA
A lo largo de la historia han surgido leyes para esta ciencia a partir de la
protección de los seres humanos. Las tres leyes de la robótica son un conjunto
de normas escritas por Isaac Asimov, las cuales todo robot debe cumplir, y las
siguientes leyes son:
1. Un robot no debe dañar a un ser humano o, por su inacción, dejar que un ser
humano sufra daño.
2. Un robot debe obedecer las órdenes que le son dadas por un ser humano,
excepto si estas órdenes entran en conflicto con la Primera Ley.
3. Un robot debe proteger su propia existencia, hasta donde esta protección no
entre en conflicto con la Primera o la Segunda Ley.
DIAGRAMA SEGUIDOR DE LÍNEA

S E G U I D O R D E L I N E A Página 10
d) COMPONENTES BASICOS DE UN ROBOT
Los robots seguidores de línea (o robots rastreadores) cumplen una única
misión: seguir una línea marcada en el suelo (normalmente una línea negra
sobre un fondo blanco o línea blanca en fondo negro).
Estos robots pueden variar desde los más básicos (van tras una línea única)
hasta los robots que recorren laberintos. Todos ellos, sin embargo, poseen
ciertas partes básicas comunes entre todos, los siguientes son:
Sensores
Un rastreador detecta la línea a seguir por medio de sensores. Hay muchos
tipos de sensores que se pueden usar para este fin; sin embargo, pero los más
comunes son los sensores infrarrojos (IR), que normalmente constan de un LED
infrarrojo y un fototransistor.
Receptor infrarrojo. Este tipo de receptores son la contraparte de los emisores,
encargados de recibir la luz infrarroja y convertirla en un voltaje análogo, estos
cuentan con un filtro de luz de día, por eso es su color aparentemente negro, lo
cual indica que reciben menos interferencia de cualquier fuente de luz externa.
LED Emisor infrarrojo. Este tipo de emisores genera luz en el espacio
infrarrojo, por lo cual no lo podemos ver a simple vista, en la actualidad se
utilizan en la mayoría de aplicaciones de control remoto, porque son baratos y
no le causan daño al usuario, su desventaja es que está restringido a distancias
cortas de trabajo y ángulos predeterminados.
Transistor BC547.
Este elemento consta de tres terminales, es un transistor de uso general el cual
está hecho de silicio y actúa en el robot como interfaz de potencia, es decir,
cuando hay una señal proveniente del amplificador esta dispara a la base de
este transistor y toda la energía de la fuente pasa vía colector emisor hacia los
motores y dependiendo cual es el que tenga señal será el que se active.

S E G U I D O R D E L I N E A Página 11
Resistencias.
Las resistencias en cualquier circuito electrónico son de gran utilidad ya que
como se nombre lo indica estas son las encargadas de limitar la corriente que
fluye de la fuente hacia los elementos y así evitar un corto, estas son de un
valor fijo, dependiendo los colores de las franjas que tienen.
Motor Mitsubishi.
Son los encargados del trabajo mecánico del robot, estos motores son de bajo
consumo y encienden depende del voltaje, están enganchados mediante el
termo fijo a la lámina que se adhiere a la placa del robot, mediante estos se le
da orientación y nivelación correcta al robot para que este tenga un óptimo
desempeño.
Potenciómetro de 50 kΩ.
Estos dispositivos en realidad son resistencias variables, de los cuales pueden
haber distintos tipos y valores, dependiendo la aplicación para la que van a ser
usados, en el caso del robot, este elemento marca un voltaje de referencia el
cual es introducido en la entrada no inversor del comparador LM393, y por lo
cual se determina la sensibilidad de nuestro robot.
Circuito Integrado (CI) LM393.
El circuito integrado LM393 es un amplificador operacional doble, el cual está
específicamente diseñado para funcionar como un comparador de alta precisión,
rápida respuesta y bajo consumo, este circuito es el encargado de decidir, cuál
de los motores activar, en base a los estímulos recibidos vía los receptores
infrarrojos, en otras palabras, cambia una señal análoga en una señal de tipo
digital, para el encendido o apagado de los motores.
LM 7805.
El 7805 es un regulador de voltaje positivo fijo, el cual es capaz de entregar
5Volts a la salida con una corriente máxima de primera, normalmente se utiliza
para mantener un voltaje constante independiente del voltaje de entrada, ideal
para aplicaciones dentro de circuitos de lógica combi nacional o micro
controladores.

S E G U I D O R D E L I N E A Página 12
Capacitores.
Estos capacitores son del tipo electrolítico, por lo que tienen polaridad, es
decir, un lado positivo y otro negativo, las principales aplicaciones de estos se
dan como filtros de señales, ya sea de audio o para fuentes de alimentación,
para el caso de nuestro robot, estos sirven para limpiar la señal del 7805,
además de almacenar voltaje, para que los dispositivos puedan tomarlo en los
picos que se dan al encender algún motor.
PIN simple.
El PIN simple es un conector ideal para cables, ampliamente utilizado en la
mayoría de dispositivos de computadoras, impresoras y tarjetas electrónicas,
su contraparte es el header hembra.
e) FUNCIONAMIENTO
Todos los rastreadores basan su funcionamiento en los sensores. Sin embargo,
dependiendo de la complejidad del recorrido, el robot debe ser más o menos
complejo
Los rastreadores más simples utilizan 2 sensores, ubicados en la parte inferior
de la estructura, uno junto al otro. Cuando uno de los 2 sensores detecta el
color blanco, significa que el robot está saliendo de la línea negra por ese lado.
En ese momento, el robot gira hacia el lado contrario hasta que vuelve a estar
sobre la línea. Esto en el caso de los seguidores de línea negra, ya que también
hay seguidores de línea blanca.
Las 2 maneras más comunes de armar los rastreadores son: OPAMS, o con
simples transistores (sin necesidad de programar nada). Esto dependiendo de la
complejidad con la que se quiera armar el circuito. Podemos utilizar un pic
16f84 para guarda en el un recorrido de x pista.
El procedimiento que se seguirá es el siguiente:
1.-Creación de las pistas del circuito sobre la placa fenólica. Sobre la placa
fenólica y del lado donde se encuentra el cobre se trazan las pistas según el
circuito con un plumón negro. Una vez hecho esto se vacía el cloruro férrico
sobre un recipiente donde se colocara la placa para poder obtener las pistas
grabadas en cobre.

S E G U I D O R D E L I N E A Página 13
2.-Montar los componentes y soldar correctamente. Con la placa fenólica
correctamente grabada y totalmente seca y libre de asperezas, se procede a
montar los componentes uno a uno y soldar correctamente.
Se tiene que tener mucho cuidado con al saldar ya que un error o distracción
puede traer serias consecuencias como posibles cortos o falsos.
3.-Ajuste de motores y engranes. Los motores del robot se ajustaran a los
extremos de una lámina de metal que se pegara a la placa principal.
A cada uno de los motores previamente se les ajusto los engranes que son los
que van a dar la tracción sobre la superficie donde se coloque dicho robot.
La parte de los sensores no es menos importante, se debe tener en cuenta la
distancia entre emisores y receptores, así como la polaridad adecuada en base
al circuito.
Una vez soldadas correctamente todas las piezas se debe colocar la pila de
9Volts, y hay que verificar que los motores giren y en el sentido hacia dentro
del robot. El Prototipo debe colocarse en un lugar plano asegurándose de que
los engranes de los motores toquen totalmente la superficie así como los
alambres que van en la parte frontal.
4.-La elaboración de la pista. Esta fue la parte más sencillo solo se utilizó cinta
de aislar negra y papel cartulina y se diseñó un trayecto cerrado cualquiera.

S E G U I D O R D E L I N E A Página 14
7. CONCLUSION:
Se logró el objetivo principal con la realización del proyecto, del robot seguidor
de línea, todo gracias a los conocimientos en la asignatura, para esto se pudo
comprobar que en el caso de los sensores hay que ubicarlos correctamente.
8. BIBLIOGRAFIA:
[1]Titulo: “APUNTES DE ELECTRONICA”. Guillermo Martin, Uría.
Editorial Madrid, 1999.
[2]Titulo: “CIRCUITOS ELECTRONICOS”. Joshep A. Edminister,
1965.
[3]Titulo: “PRINCIPIOS DE ELECTRÓNICA”, Malvino.