ESTUDIO DE LOS SISTEMAS DE EXCITACIÓN Y REGULADORES...
333
ESCUELA POLITÉCNICA NACIONAL FACULTAD DE INGENIERÍA ELÉCTRICA ESTUDIO DE LOS SISTEMAS DE EXCITACIÓN Y REGULADORES DE VOLTAJE DE LAS MAQUINAS SINCRÓNICAS TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN LA ESPECIALIZACION ELECTRÓNICA Y CONTROL PABLO ROBINSON RIVERA ARGOTI QUITO, JULIO, 1986
Transcript of ESTUDIO DE LOS SISTEMAS DE EXCITACIÓN Y REGULADORES...

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
ESTUDIO DE LOS SISTEMAS DE EXCITACIÓN Y REGULADORES
DE VOLTAJE DE LAS MAQUINAS SINCRÓNICAS
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN LA
ESPECIALIZACION ELECTRÓNICA Y CONTROL
PABLO ROBINSON RIVERA ARGOTI
QUITO, JULIO, 1986
\o que el presente trabajo
ha sido realizado en su totalidad
por el señor Pablo Rivera Argoti.
K
DIRECTOR DE TESIS

A G R A D E C I M I E N T O
Al señor Ing. Mil ton Toapanta por su valiosa
guía para el desarrollo de este trabajo.
A mis Padres,
A mis Hermanos
Í N D I C E
Pag.
CAPITULO I: INTRODUCCIÓN 1
CAPITULO II; MODELO MATEMÁTICO DE LA MAQUINA SINCRÓNICA
2.1 Ecuaciones de la Máquina Sincrónica en variables abe 5
2.2 Ecuaciones de la Máquina Sincrónica en ejes qdo 8
2.3 Ecuaciones de la Máquina Sincrónica en términos de conc£ 13
tenaciones de flujo por segundo como vari bles de estado
2.4 La Saturación de la Máquina Sincrónica 17
2.5 Ecuaciones de la Máquina Sincrónica en términos de conca^ 1
tenaciones de flujo mutuo saturado
2.6 Interconexión de la Máquina Sincrónica con una línea de 22
transmisión R - L
2.7 Representación del sistema mecánico 29
CAPITULO III: CONFIGURACIÓN DE LOS SISTEMAS DE EXCITACIÓN
3.1 Disposición de los componentes de los Sistemas de Excita^ 31
ción
3.2 Sistemas de Excitación primitivos ~ 34
3.3 Reguladores de Voltaje 38
3.4 Excitador de Excitación Independiente 47
3.5 Excitador Autoexcitado 51
3.6 Función de Saturación del Excitador 53

i i
Pag.
CAPITULO VI: SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
4.1 Descripción de los Sistemas de Excitación de Corriejí
te Continua 58
4.2 Modelo del Sistema de Excitación de Corriente Contí^
nua con límites del regulador de voltaje específicos 5^
4.3 Representación Matemática 6^
4.4 Modelo del Sistema de Excitación de Corriente Contí
nua con límites del regulador de voltaje proporcio^
nales al voltaje terminal del generador sincrónico 58
4.5 Representación Matemática 6*
CAPITULO V: SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
5.1 Descripción de los Sistemas de Excitación de Corriejí
te Alterna 71
5.2 Modelo del Sistema de Excitación de Corriente Altejr
na sin realimentación de corriente de campo del Exci^
tador 72
5.3 Representación Matemática . ''
5.4 Modelo del Sistema de Excitación de Corriente Alter-
na con realimentación de corriente de campo del Excj_
tador 82
5.5 Representación Matemática
CAPITULO VI; SISTEMAS DE EXCITACIÓN ESTÁTICOS
6.1 Descripción de los Sistemas de Excitación Estáticos
6.2 Modelo del Sistema de Excitación Estático con fuente
84

m
Pag.
de voltaje como fuente de potencia, y rectificador ^
trolado. 93
6.3 Representación Matemática 95
6.4 Modelo del Sistema de Excitación Estático con fuente
de voltaje y corriente como fuente de potencia, y re£
tificador controlado 98
6.5 Representación Matemática 100
CAPITULO VII: SIMULACIÓN DE LOS SISTEMAS DE EXCITACIÓN
7.1 Simulación en é computador digital 104
7.2 Método de resolución de las ecuaciones diferenciales 107
7.3 Condiciones iniciales de los Sistemas de Excitación 110
7.4 Programa digital 119
CAPITULO VIII; APLICACIONES
8.1 Estado Estable 139
8.2 Cambio brusco de la carga 188
8.3 Análisis y comparación de resultados 189
CAPITULO IX: CONCLUSIONES Y RECOMENDACIONES 242
APÉNDICE A: LISTADO DEL PROGRAMA
APÉNDICE B: MANUAL DE USO DEL PROGRAMA
APÉNDICE C: PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN Y LA

IV
Pac
MAQUINA SINCRÓNICA
APÉNDICE D: ANÁLISIS MATEMÁTICO DEL VOLTAJE TERMINAL DE LA MA
QUINA SINCRÓNICA EN TÉRMINOS DE CONCATENACIONES
DE FLUJO
B I B L I O G R A F Í A

C A P I T U L O I
INTRODUCCIÓN
Uno de los sistemas de control importantes para la operación sa
tisfactoria de un generador sincrónico son los sistemas de excitación y
los reguladores de voltaje.
En estudios anteriores se analizó las respuestas del generador
ante ciertas perturbaciones, sin considerar los sistemas de control co
rrespondientes a los sistemas de excitación y los reguladores de volta^
je, para lo cual se consideraba que el voltaje de excitación se mante_
nía constante.
Posteriormente se realizan estudios de los sistemas de excita-
ción acoplado al generador sincrónico en un computador análogo represejí
tándosele únicamente como una fuente de voltaje generado de una magnj_
tud constante detrás de la reactancia sincrónica.
En consecuencia, el presente trabajo está conducido a represen^
tar la máquina sincrónica con todos sus parámetros, incluyéndose además
dentro de la modelación al sistema de excitación.
La parte fundamental en un sistema eléctrico de potencia lo cons^
tituye la máquina sincrónica, siendo por tanto importante el analizar y
comprender la operación de los sistemas de excitación y los reguladores
de voltaje, para de esta manera entender su influencia sobre el compo_r
tamiento del sistema eléctrico de potencia.

Por tanto, para concretar lo expuesto, se ha utilizado un siste
ma eléctrico compuesto de una máquina sincrónica conectada a una barra
infinita a través de un transformador y una linea de transmisión.
El modelo matemático realizado para la simulación de los sist£
mas de excitación es el que toma como variables de estado los voltajes.
Las ecuaciones que determinan los sistemas de excitación son acopladas
a las ecuaciones que conforman el modelo de la máquina sincrónica, para
de esta manera determinar el sistema general que será analizado en el
computador digital.
El método a seguirse para la resolución de las ecuaciones dife-
renciales es el método Runge-Kutta de cuarto orden.
Los sistemas de excitación a estudiarse son: de corriente contí
nua, corriente alterna y estáticos.
Para cumplir con lo expuesto anteriormente en el Capítulo II de
este trabajo se realiza la modelación de la máquina sincrónica la que
se ha tomado de la referencia |s[, "Methods of Interfacing Synchronous
Machine with Transmission Systems in a Digital Simulation".
Como se anotó anteriormente, para entender la operación de las
excitatrices y reguladores de voltaje se ha dedicado el Capítulo III,
en este capítulo se da una explicación general de cómo están conforma^
dos los distintos tipos de sistemas de excitación y cuál es la función
que desempeñan cada una de las partes constitutivas de los mismos.

- 3
En el Capítulo IV se hace un análisis pormenorizado de dos tipos
de sistemas de excitación de corriente continua. Este tipo de sistemas
utiliza un generador de corriente continua como fuente de excitación
del generador sincrónico.
El Capítulo V describe los sistemas de excitación de corriente
alterna, los que están formados por un alternador y un rectificador es
táticos o rotativo que produce la corriente continua, necesaria para el
campo del generador sincrónico.
En el Capítulo VI se hace el análisis y modelación de los sist£
mas de excitación estáticos, el voltaje de excitación para el generador
sincrónico es abastecido a través de transformadores y rectificadores.
Para probar la bondad del modelo matemático, en el Capítulo VII,
primeramente se realiza una prueba de funcionamiento en el estado esta^
ble, con lo cual se puede concluir la buena operación del proceso de iji
tegración de las ecuaciones diferenciales, así como de todos los subpro
gramas y funciones desarrolladas para el estudio del sistema.
Para analizar el comportamiento de los sistemas de excitación y
del sistema en general en estado transitorio, se realiza una variación
brusca de la carga, la que consiste en cambiar el torque mecánico inj_
cial en cualquier instante de tiempo.
En este análisis se compara la velocidad de respuesta de los di£

tintos tipos de sistemas de excitación ante estas variaciones bruscas
de la carga y también se visualiza el comportamiento del sistema modela_
do.
C A P I T U L O II
MODELO MATEMÁTICO DE LA MAQUINA SINCRÓNICA
2.1 ECUACIONES DE LA MAQUINA SINCRÓNICA EN VARIABLES a, b. c
La máquina sincrónica se puede representar por una máquina idealj_
zada formada de dos polos con tres devanados en el estator, un devanado
en el campo y dos devanados amortiguadores o de damping, figura 2.1-1.
Los seis devanados que la conforman, están acoplados magnéticamente y és^
te acoplamiento es función de la posición del rotor.
Para la obtención del modelo que se desarrolla en este trabajo se
asume lo siguiente:
a) Un comportamiento lineal del hierro magnético del núcleo y la
saturación es introducida como una corrección de este modelo lineal.
b) Distribución simétrica de los devanados del estator, que esta^
blecen una distribución sinusoidal de las ondas de fuerza magnetomotriz
en el entrehierro.
c) Las ranuras del estator producen variaciones despreciables
.en las inductancias del rotor.
d) Entrehierro uniforme.
Las concatenaciones de flujo para los seis devanados se definen

como:
6 -
eje b
eje q
eje a
eje c eje d
fd
kd
Fl». H. 2.1 - M A Q U I N A S I N C R Ó N I C A D E P O L O S
S A L I E N T E S , B FASES, 2 POLOS
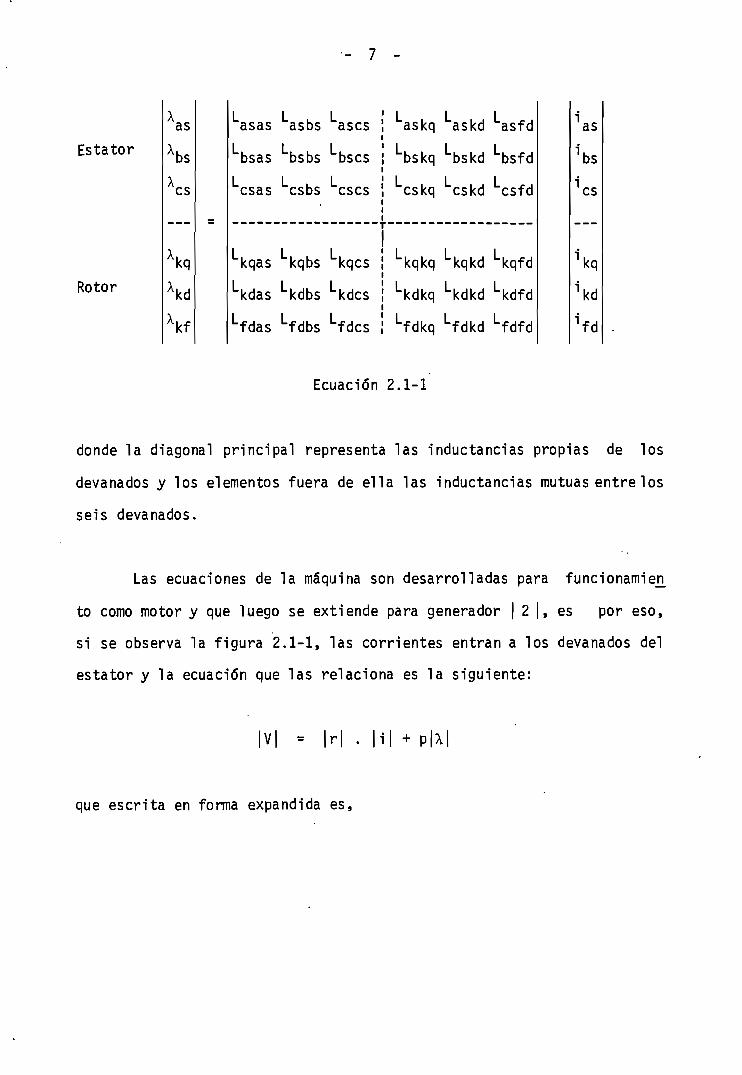
Estator
Rotor
Aas
Xbs
*cs
Ak,\\
asas asbs ases askq askd asfd
Lbsas Lbsbs Lbscs Lbskq Lbskd Lbsfd
esas csbs eses cskq cskd csfd
Lkqas Lkqbs Lkqcs Lkqkq Lkqkd Lkqfd
Lkdas Lkdbs Lkdcs Lkdkq Lkdkd Lkdfd
Lfdas Lfdbs Lfdcs Lfdkq Lfdkd Lfdfd
\s
V
1cs
'kq
1kd
Vd
Ecuación 2.1-1
donde la diagonal principal representa las inductancias propias de los
devanados y los elementos fuera de ella las inductancias mutuas entre los
seis devanados.
Las ecuaciones de la máquina son desarrolladas para funcionamiejí
to como motor y que luego se extiende para generador | 2 |, es por eso,
si se observa la figura 2.1-1, las corrientes entran a los devanados del
estator y la ecuación que las relaciona es la siguiente:
p|A|
que escrita en forma expandida es,
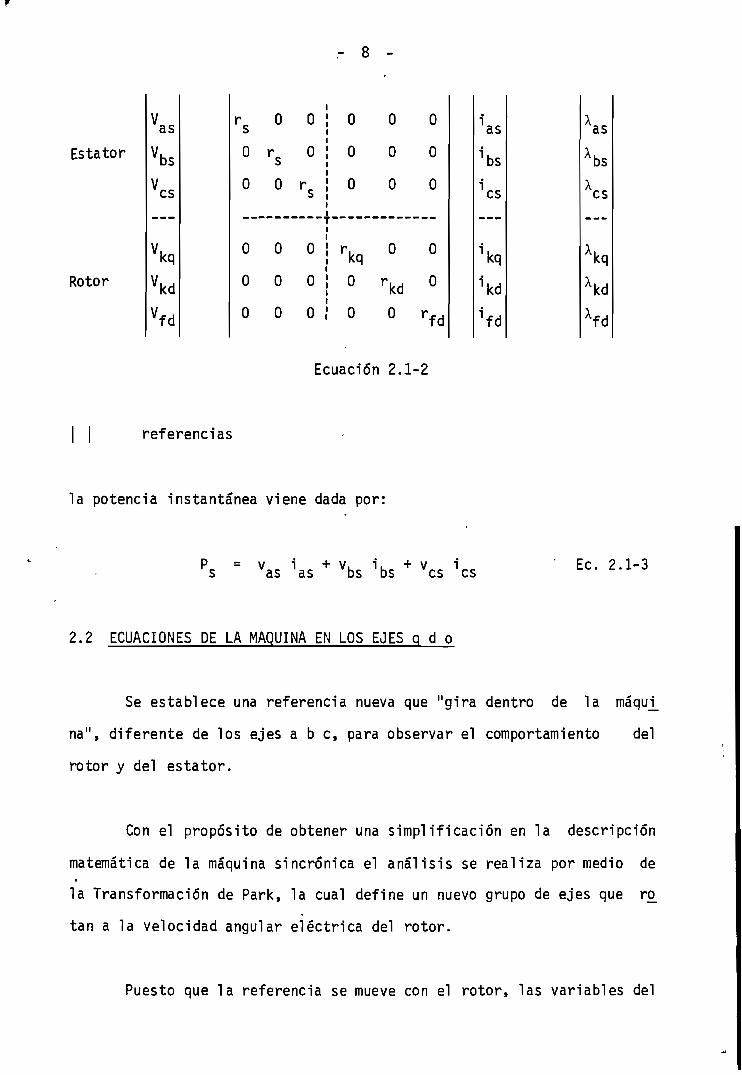
Estator
Rotor
Vas
Vbs
Vcs
Vkq
Vkd
Vfd
rs 0 0 0 0 0
0 rs 0 0 0 0
0 0 rg 0 0 0
T
0 0 0 rkq 0 0
0 0 0 0 rk(j 0
0 0 0 0 0 rfd
1as
1bs
1cs
'kq
1kd
1fd
Aas
Xbs
Xcs
Xkq
I/rl
xfd
Ecuación 2.1-2
referencias
la potencia instantánea viene dada por:
Ps = vas 1as + vbs 1bs + vcs 'es Ec. 2.1-3
2.2 ECUACIONES DE LA MAQUINA EN LOS EJES q d o
Se establece una referencia nueva que "gira dentro de la máquj_
na", diferente de los ejes a b e , para observar el comportamiento del
rotor y del estator.
Con el propósito de obtener una simplificación en la descripción
matemática de la máquina sincrónica el análisis se realiza por medio de
la Transformación de Park, la cual define un nuevo grupo de ejes que ro_
tan a la velocidad angular eléctrica del rotor.
Puesto que la referencia se mueve con el rotor, las variables del
rotor no sufren cambio alguno, y como se mira el comportamiento en los
ejes q y d se puede considerar que la transformación se hace de un sist£
ma trifásico a un bifásico. Las variables del eje cero no están asocia-
das con la transformación y existen solamente cuando hay asimetría y en
lugar donde ésta se produce.
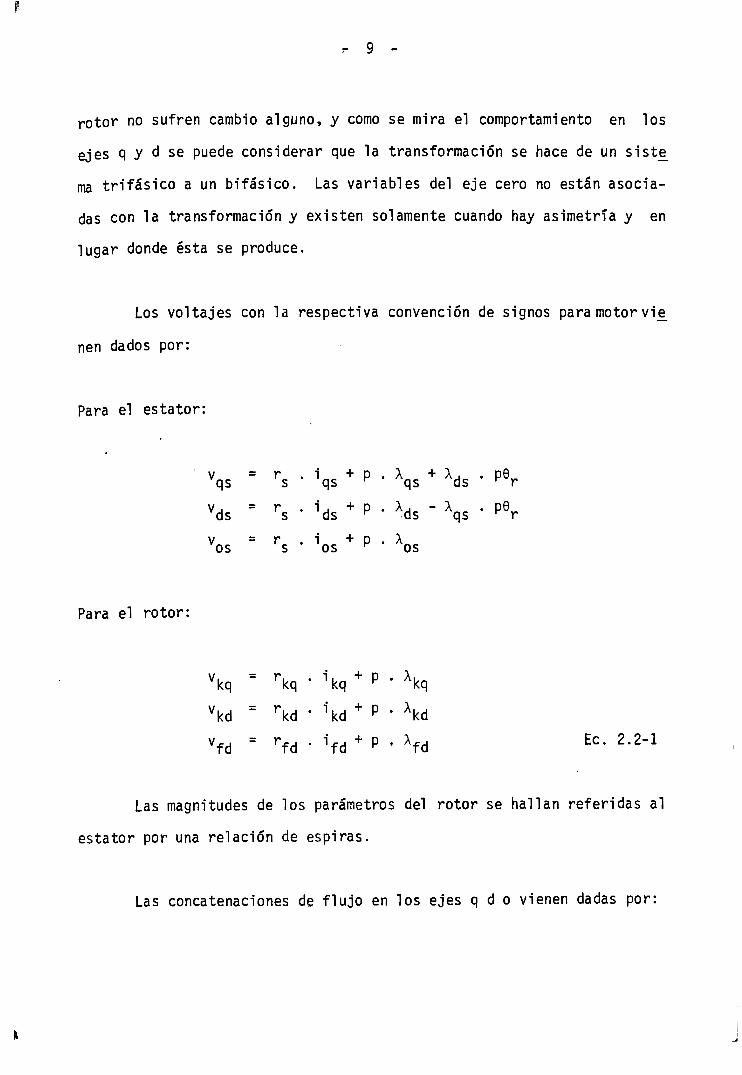
Los voltajes con la respectiva convención de signos para motor viie
nen dados por:
Para el estator:
Vqs = rs • V + P ' Aqs + Ads '
vds = rs • 1ds + P • Xds - Aqs •
vos = rs • s + P • Xos
Para el rotor:
Vkq = rkq • 1kq + P ' Akq
Vkd = rkd ' 1kd+ P '• Xkd
Vfd = rfd ' 1fd + P ' Xfd Ec- 2'2-
Las magnitudes de los parámetros del rotor se hallan referidas al
estator por una relación de espiras.
Las concatenaciones de flujo en los ejes q d o vienen dadas por:
- 10 -
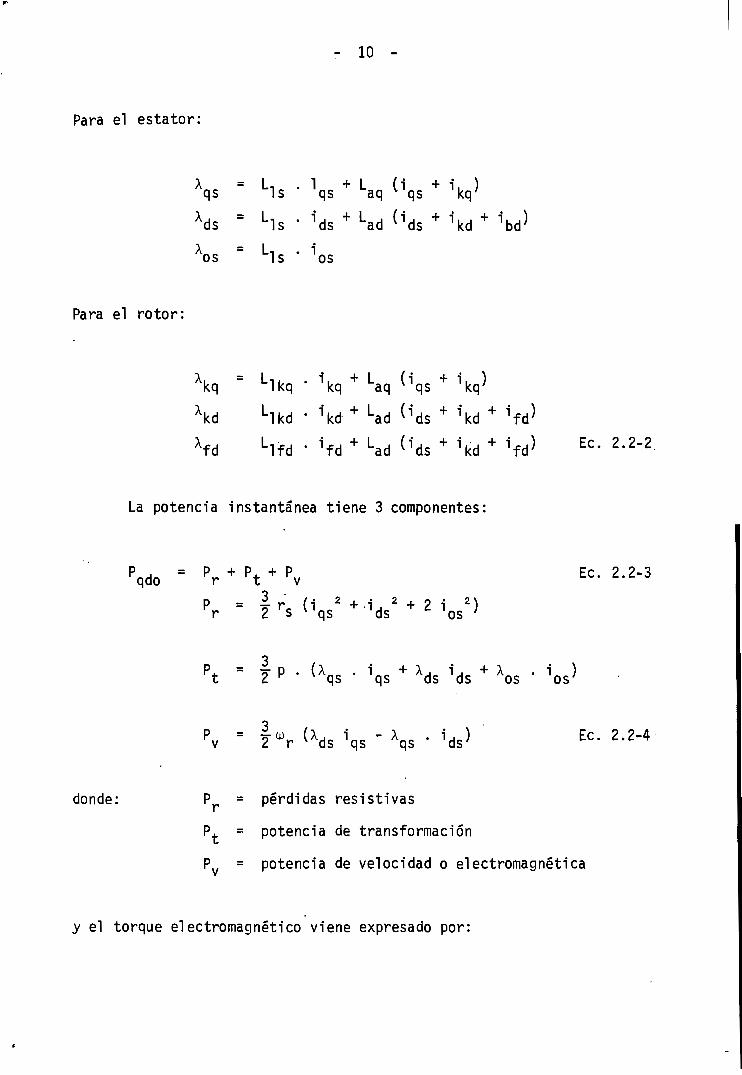
Para el estator:
V = Hs - V + Laq Ciqs + V
Xds = Lls • 1ds + Lad <1ds + 1kd
Aos = Lls • 1os
Para el rotor:
Akq = Llkq * 1kq + Laq (iqs + V
Akd Llkd • 1 kd + L ad ( Í ds + 1 kd +
xfd Llfd ' 1fd + Lad <1ds + 1kd +
La potencia instantánea tiene 3 componentes:
Pqdo - Pr + Pt + Pv Ec'
Pr ' ! rs (íqs2 + V + 2 os2)
Pt ' " ' (Xqs ' V + Ads 1ds + Aos ' 1os'
Pv
donde: P = pérdidas resistivas
P. = potencia de transformación
P = potencia de velocidad o electromagnética
y el torque electromagnético viene expresado por:
,- 11 -
!v = l(!ooí» 2 2
Vids) .Ec. 2.2-5
donde: P = número de polos
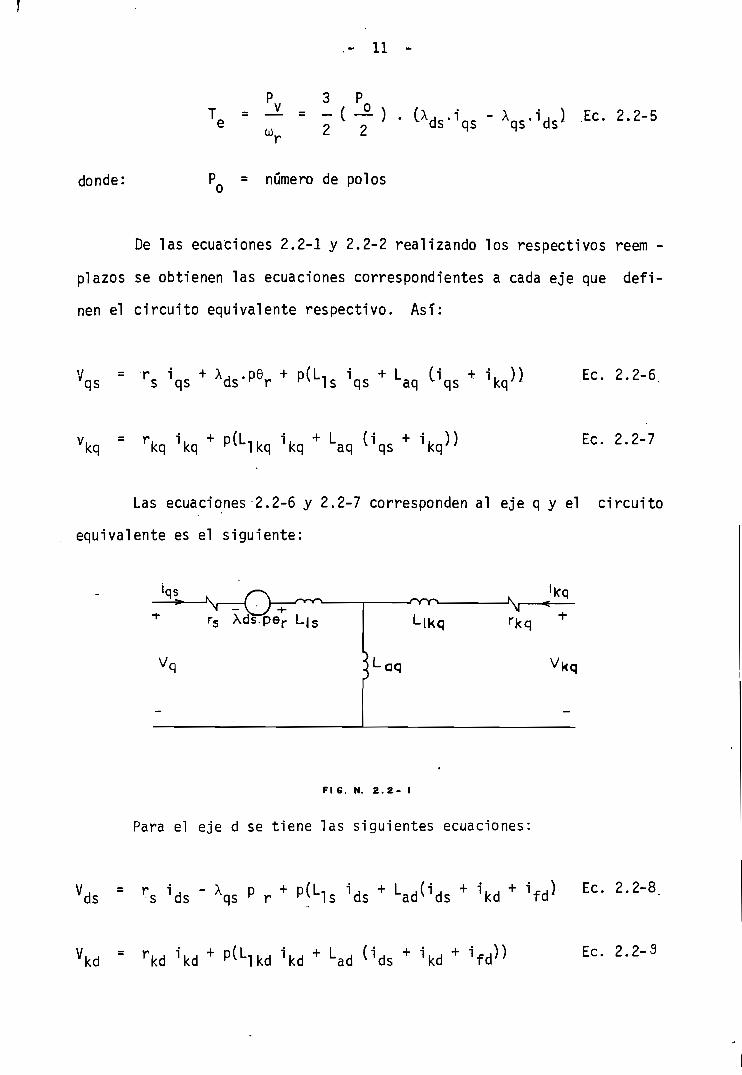
De las ecuaciones 2.2-1 y 2.2-2 realizando los respectivos reem •
plazos se obtienen las ecuaciones correspondientes a cada eje que defi-
nen el circuito equivalente respectivo. Así:
Vqs = rs V 1qs + Laq Ciqs *- 1kql}
Vkq = rkq p(Llkq 1kq + Laq (iqs Ec. 2.2-7
Las ecuaciones 2.2-6 y 2.2-7 corresponden al eje q y el circuito
equivalente es el siguiente:
Fl S. N. 2.2- I
Para el eje d se tiene las siguientes ecuaciones:
Vds = rs ds
Vkd = rkd \á + P(Llkd 1kd + Lad

- 12 -
fd 1 + p(L + L <1 + 1fd lfd d ad ds kd
El circuito equivalente es el siguiente
id
Fl 6. N. 2. 2 - 2
Para el eje cero se obtiene la siguiente ecuación:
os s os Ec. 2.2-11
y su circuito equivalente es:
vos L,
FIO. N. 2. 2 - 3

- 13 -
2.3 ECUACIONES DE LA MAQUINA SINCRÓNICA EN TÉRMINOS DE CONCATENACIONES
DE FLUJO POR SEGUNDO COMO VARIABLES DE ESTADO
Se pueden expresar las ecuaciones de voltaje en valores en p.u.
haciendo uso de las siguientes consideraciones
Per. d= operador -rr
= ue . A
= concatenaciones de flujo por segundo
r - Q" Wx ~ r fX rfd T
u. = velocidad angular eléctrica base
ü> = velocidad angular eléctrica del rotorr
Se tiene por lo tanto una nueva presentación del sistema de
ciones 2.2-1, en donde se ha reemplazado los voltajes de los devanados
de damping por cero, puesto que están cortocircuitados.
v = r ivq rs 'q
j = r i . + - w. + oí —d s d ü>. d q w.
O = r, i , +kq kq
O = r, . i, , + -- , .kd kd w rkd
Ex • 7 Crfd ifd + i *fd)
Las concatenaciones de flujo por segundo son:
Ec. 2.3-1
r 14 -
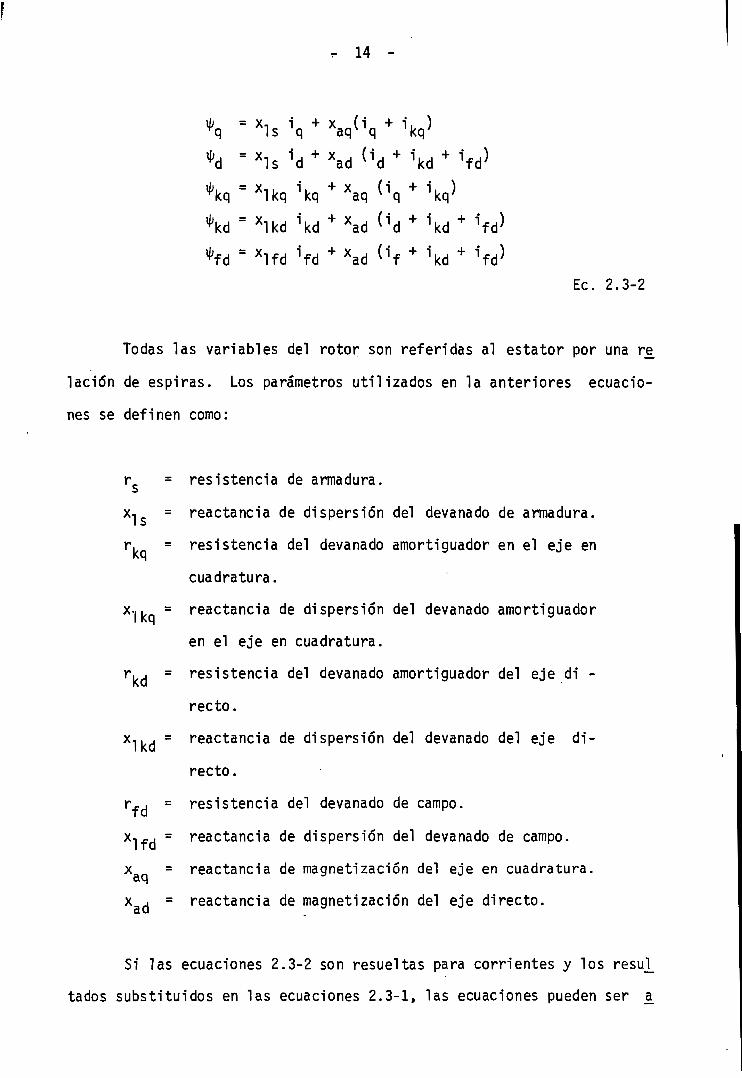
*q ' Xls 1q + Xaq(1q + V
*d = Xls 1d + Xad (id + \ + Vd}
* k q = X l k q 1 k q + x a q (iq + Íkq)
*kd = Xlkd 1kd + Xad (id + 1kd + Ífd)
*fd = xlfd Vd + xad (l'f + \ + 1fd)
Ec. 2.3-2
Todas las variables del rotor son referidas al estator por una r
lación de espiras. Los parámetros utilizados en la anteriores ecuacio
nes se definen como:
r = resistencia de armadura.
x, = reactancia de dispersión del devanado de armadura.
r. = resistencia del devanado amortiguador en el eje en
cuadratura.
X-,. = reactancia de dispersión del devanado amortiguador
en el eje en cuadratura.
rkd = resistencia del devanado amortiguador del eje di -
recto.
xlkd = reactancia de dispersión del devanado del eje di-
recto.
rf . = resistencia del devanado de campo.
xlfd = reactancia de dispersión del devanado de campo.
x=,^ = reactancia de magnetización del eje en cuadratura,aq
x ^ = reactancia de magnetización del eje directo.
Si las ecuaciones 2.3-2 son resueltas para corrientes y los resul_
tados substituidos en las ecuaciones 2.3-1, las ecuaciones pueden ser a

- 15 -
rregladas de una manera conveniente para el desarrollo en el computador
por la facilidad con que permitirán la introducción de la saturación, ojb
teniéndose lo siguiente:
donde
lvqdf' + lxmchl Ec. 2.3-3
'qdf I
*mrh =Illull
y< Y di r xr s , *mq n r s *mq n n
Y ^ Y ' /,! X X U U
xls xls wb xls xlkq
wr rs ( xmd jj 0 rs xmd rs xmdwb xls xls xls xlkd xls xlfd
y* x y xkq mq n kq / mq ,x n n
Y Y V * Y 'XlkqXls Xlkq Xlkq
rkd xmd n rkd /xmd ^ rkd xmdü Y Y X ^ Y ^ Y X
xlkdxls Ikd xlkd xlkdxlfd
rfd xmd n rfd xmd rfd /md n0 V Y Y Y Y \Y '
xlfd xls xlfdxlkd xlfd. xlfd

,- 16 -
Xls xaq xlkq
<ls xad
El modelo así obtenido tiene por variables de estado las concate^
naciones de flujo por segundo.
Puesto que se considera una máquina trifásica simétrica las varia_
bles del eje no se presentan y el orden del sistema se reduce. Las c£
rrientes vienen dadas por:
en donde:
1, d| = -
ls 'Ikq
md - 1 O
O
xmd xmdxlkd xlfd
Ec. 2.3-4
Para determinar los valores de las corrientes de fase debe consi-
derarse la transformación de.Park, como:
1a = iq eos id sen Ec. 2.3-5
- 17 -
2.4 LA SATURACIÓN DE LA MAQUINA SINCRÓNICA
En las máquinas rotativas el entre-hierro presente predomina so-
bre el hierro del núcleo, por lo cual la consideración del circuito mac[
nético lineal es una buena aproximación, sin embargo se logra mayor pre_
cisión considerando la saturación. El modelo matemático de concatenacip_
nes de flujo obtenido es muy práctico para la introducción de la no li-
nealidad del hierro debido a que todos los parámetros son constantes a
excepción de las concatenaciones de flujo magnetizantes \¡> . y que
son las que se debe ajustar; pero dado que el entrehierro presente en el
eje en cuadratura es mayor que en el eje directo, no se considera el e-
fecto de la saturación, por lo que, generalmente es necesario ajustar sp_
lamente ^md y obtener md* (saturado). |a|
Se define las concatenaciones de flujo mutuo del eje directo con
la ecuación 2.4-1, en la cual se tiene la reactancia de magnetización
del eje directo multiplicada por las corrientes que circulan por ella
(Ver figura 2.2-2).
Ec'
Reemplazando en Ec. 2.3-2 y despejando corrientes se tiene:
.kd x
xlkd

- 18 -
. _ tyfd " Mnd r o „ ojj - Ec. 2.4-2
Xlfd
Reemplazando en Ec. 2.4-1 se obtiene
l, , \b. ,
1 + 7 J Ec' 2-4'x]fd
2.5 ECUACIONES DE LA MAQUINA SINCRÓNICA EN TÉRMINOS DE CONCATENACIO-
NES DE FLUJO MUTUO SATURADO
Se definen las concatenaciones de flujo mutuo saturado *d , a
partir de i|>md, ajustándolo por medio de una función de la saturación
DXI |i|,de tal modo que:
\b*. = x,. (i . + i, . + i,:-) - DXI Ec. 2.5-1md ad d kd td
Las corrientes haciendo esta consideración están dadas por:
xls
xlkd
= Ec<fd x
xlfd

- 19 -
Reemplazando en Ec. 2.5-1, se tiene:
*md = xadmd
de donde se obtiene:
.md ( x +xls "Ikd
$f. DXI. 'O \ y '
Fd xadxad xls xlkd .xlfd
es decir: md ^adDXI Ec. 2.5-3
La saturación como puede verse, es una,función implícita, es de-
cir depende de sí misma. Este valor al ser utilizado en lugar de ip . ,
en el sistema de ecuaciones 2.3-3 da las siguientes ecuaciones de esta-
do:
Ec. 2.5-4
donde:
= V *d*
'qdf1 vq, vd, o, o, líSL Fxad x

- 20 -
msO i o d rfd' x ' ' x ' x
xls xlkd x-lfdEc. 2.5-5
La matriz |x | está representado por:
mch
r xi( jnaxls xls
rkq Xmq
Xls Xlkq
ls
0
r xs xmg
xls xlkq
o
rkq ( Xmq
Xlkq Xlkq
0
-1)
o
fkd(lkd
O
rfd(lfd
El comportamiento no lineal del hierro se obtiene de la curva de
vacío, en la que se representa el voltaje de armadura versus la corríen_
te de excitación. Haciendo funcionar el grupo motor generador a la velo^
cidad nominal del generador, se incrementa la corriente de excitación, y
se toma en cada paso lecturas, del voltaje de armadura, observando que j_
nicialmente se tiene una relación lineal entre los dos parámetros. En un
cierto valor de I , comienza a influenciar la saturación, separándosesxla característica de circuito abierto de la relación lineal. A este pun

CO
NC
AT
EN
AC
ION
ES
DE
FLU
JO
MU
TU
O
SA
TU
RA
DO
'm*d
VO
LT
AJ
E
DE
A
RM
AD
UR
A
o c o m o o o m r e n O o o Tt O o o

- 22 -
to se conoce como crítico y le corresponderá un valor de concatenaciones
de flujo mutuo crítico
Si se gráfica i|>m(J vs. md*, se tiene una recta (con una pendiera
te de 45° ), hasta llegar a ^>m¿c'» a partir de este punto estos valores
difieren entre sí por el parámetro DXI, el mismo que a medida que avanza
por la curva toma valores cada vez mayores. (Ver figura H- 2.5-1).
Para la simulación digital se construye la curva DXI en función
de mc¡*> en la cual se puede apreciar que DXI tiene un valor cero hasta
llegar a ^mdc> en adelante la curva es aproximada a tres rectas de di-
ferente pendiente, que siguen con suficiente precisión el comportamiento
no lineal del hierro. |i|
2.6 INTERCONEXIÓN DE LA MAQUINA SINCRÓNICA CON UNA LINEA DE TRANSMISIÓN
R - L
El método que se utilizará para la simulación es incluyendo la re_
sistencia y reactancia de la línea de transmisión como parte de la
tencia y reactancia de dispersión del estator respectivamente. |s.|
CBO-RL
RL•v-
-Fl6. H. 2.6 - |
- 23 -
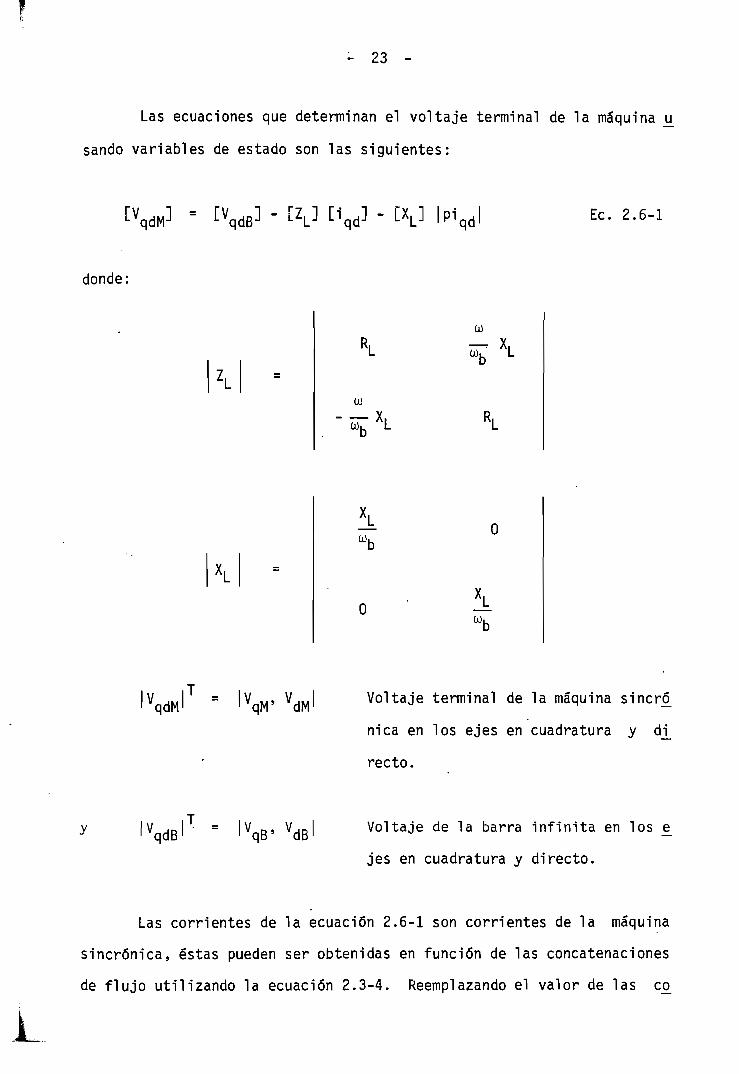
Las ecuaciones que determinan el voltaje terminal de la máquina
sando variables de estado son las siguientes:
donde:
tv
ü)
co—r X
Ec. 2.6-1
= 'VqM'
\b
\b
Voltaje terminal de la máquina sincr£
nica en los ejes en cuadratura y d^
recto.
Voltaje de la barra infinita en los
jes en cuadratura y directo.
Las corrientes de la ecuación 2.6-1 son corrientes de la máquina
sincrónica, éstas pueden ser obtenidas en función de las concatenaciones
de flujo utilizando la ecuación 2.3-4. Reemplazando el valor de las co
L

- 24 -
rrientes de la ecuación 2.3-4 en la ecuación 2.6-1, el voltaje terminal
de la máquina en términos de las concatenaciones de flujo y sus deriva-
das, se convierte en:
V - l v q d B l + l z J 1*1 1 1*1
Ec. 2.6-2
Incluyendo la resistencia de la línea en la resistencia de la ar^
madura y la reactancia de la línea en la reactancia de dispersión de la
armadura sé obtiene los siguientes parámetros:
por r£'
xls P°r xls' = xls + XL
x por x ' = ( — , + — +mq P°r xmq I xls' xaq
x . por x .' = ( — —i + — =- + — — +P
. . — —i — - — — — —md md xls xad xlxd xlfd
La ecuación 2.3-3 se convierte en:
donde:
Además, l ^ ' l tiene la misma definición que | ^ l tomando en

- 25 -
cuenta el cambio realizado en rg, x.j , x y xmd'
Reemplazando las derivadas de las concatenaciones de flujo de la
ecuación 2.6-3 en la ecuación 2.6-2 se obtiene
'qdM1
Ec. 2.6-4
Realizando las multiplicaciones matriciales y agrupando términos
semejantes en la ecuación 2.6-4 se obtiene
qdM1
Kvq ' VqB
Kvd ' VdB + K' ' Vf
donde:
Is1
A' B1 C1 D1 E'
F1/•> IU r
Ec. 2.6-5
xls' xlfd
K = 1 +vq
K , = 1 +vd
X-|,.i
X 'xmqX-I..I
md
- 1
- 1

X
. oí
cr
oí
i/i
£
_i¿
x br
"x
'*"• _
J
•
1!_
_.!
<*
X+ —
1 C7
X
E
Xtn V
I
C7
-CM
E
l— X
C7X
^¿
s-i
-Q
¿r3
3°"
4
0
-M-1
¿
CM
i—
•
cr ^¿CM
X'
_J
, *-
x
xH™
*
~N
a J X
^
• •X ^
•I/)
•o
i—-i¿
-V
. X
•
•o
-oCM E
^~
C
M r—
X
X
+1
c¿
•
f ^
i-H 1
Td
</>a
i—-
n-X
1 X
+1
X,.
• 1
, gj
- M•-
1
cj
"x
fxt™
-
É
_
1
1 -
—_
j X
oí-
^
oí
E
w
E-
1—
• -
X
|x
xM
>t
rfj">r
--I
S-l
^1
S-l
-Q_
j 3
13
3 |3
CT
Q£
^¿ *~
' —
J _l
x
. x
xen
cr
• E
^¿
•
.M
X
J
X
~O
~O
T3
"O_•
—
G
¿¿
E
«*-
x
+
X
x~
~
x x~
m
CM••
^ —
1<-H
X
|
t/1
T3
| to
T3
^~
E
r-
«4
--h
s-
x
x
|x
•u-
01
"O
<+
-C
O
r—
cM
E
^~
S-
-
-
CM
X
XX
CU
.—*l

- 27 -
MI - mq w rn — — •;• . AI • —Xlkq L Wb
r ' x ' Y ' x' r .x'I _ s md / md . \ md kd Y / md
~ x "y * x *•) *\ A, (xls xlkd xTs L x2 L xlkd
, fd md w , md D—- • A. i- - . K.Y2 Y 1M Lx Ifd ' xlkd - | kd
M I y I y I M y I 2
•> i _ s md / md , \ kd md Yu - — . - ^ —¡ - i; f . A,x l 's xlfd x l s x 2 . L
v ' Y* Y ' Y ', md fd w / md . \ md Df . A. V r 1) ^ y • K,
x2lfd L xlfd xlfd L
Si se toma en cuenta la saturación de la máquina sincrónica y
Tizando los cambios antes indicados, la ecuación 2.5-4 se convierte en
donde l^'mch'' '*md' 'x'msl t1enen la misma definición de |
üj* ,,|x l a excepción del cambio que se debe realizar en r_, xlf., xmr, ymd ' ms ' s i s mq
xmd'
Reemplazando las derivadas de las concatenaciones de flujo mutuo
saturado de la ecuación 2.6-6 en la ecuación 2.6-2 se tiene:
- 28 -
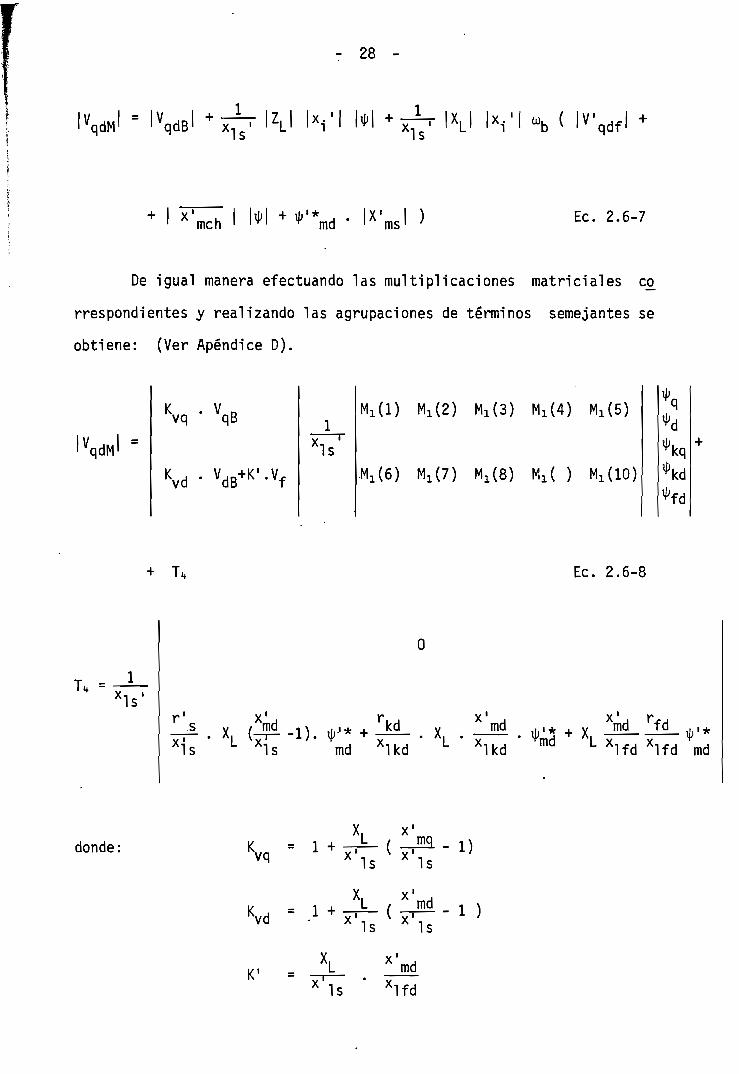
= 'V 'V "
I x'mch Ec. 2.6-7
De igual manera efectuando las multiplicaciones matriciales c£
rrespondientes y realizando las agrupaciones de términos semejantes se
obtiene: (Ver Apéndice D).
'qdM'
vd VdB+K'-Vf
IsMi(8) M )
'kq
>kd
;fd
donde:
Kvd '
x1
x ' Y 'x Is x Is
X x'mdx is x is
- D
- 1 )
K1
s lfd
Ec. 2.6-8
r1
xís. X, . X
x'md'Is md Alkd L ' xIkd
fdL x,-. xlfd lfd md
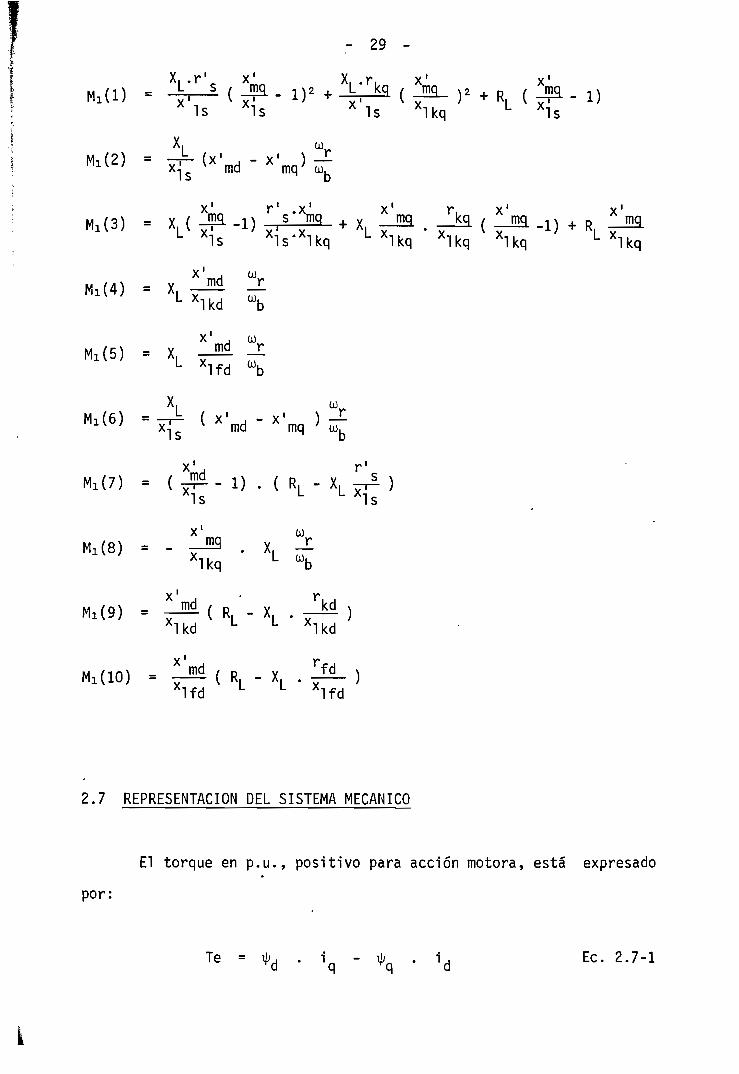
- 29 -
ls ls' I)
Is lkq ls
Mi(2) = 77 (x'md mq' w.
x' r ' . x '( mcl i s mq3TL "1} x' .
r x'L x
ls*Alkq "• Alkq Alkq Alkq
Mi(4)X'md
L x lkd
x'1 x
Ikq
Mi(5) =
Mi(6) md mq
M i ( 7 ) =x1 r1
Is
—¡¡¡y . x, -í-Xlkq L wb
Mi(9) =x1 ,mdlkd
X '
y, - A. .
L L x
md
lkd
Y*v
x L ~ L ' xxlfd L L xlfd
2.7 REPRESENTACIÓN DEL SISTEMA MECÁNICO
El torque en p.u., positivo para acción motora, está expresado
por:
Te = ^d ' 1q - *q • 1dEc. 2.7-1

- .30 -
La velocidad del rotor viene expresada por:
1(Te - Tm) Ec. 2.7-2
r 2H.p
En donde:
H = constante de inercia en segundos
Tm = torque de la máquina impulsora
El ángulo de potencia se obtiene de la ecuación:
Ec. 2.7-3
w = velocidad angular eléctrica en p.u.
wr = velocidad angular eléctrica del rotor en
p.u.

- 31 -
C A P I T U L O III
CONFIGURACIÓN DE LOS SISTEMAS DE EXCITACIÓN
3.1 DISPOSICIÓN DE LOS COMPONENTES DE LOS SISTEMAS DE EXCITACIÓN
La fuente de voltaje de campo para la excitación de una máquina
sincrónica es un sistema de excitación que incluye el excitador, regula^
dor de voltaje y control manual. Los sistemas de control modernos para
grandes máquinas sincrónicas son sistemas de control con realimentación.
La capacidad para ajustar el funcionamiento transitorio y el de estado
estable del sistema de potencia es una clara ventaja de los sistemas de
control con realimentación. La figura H- 3.1-1 indica los elementos e-
senciales de un sistema de control automático, y en la figura N£ 3.1-2
se da un trazo general de los componentes que conforman los sistemas de
excitación. e
Señal deR e f e r e n c I a "f"
Señal
actúan te ELEMENTOS DE
TRANSMISIÓN
Señal deR eall menta c ldn
ELEMENTOS DE
REALIMENTACIOI
Variable directamentecontro la da
FIO. N. 3 . 1 - 1 E L E M E N T O S FUNDAMENTALES OE UN SISTEMA DE
CONTROL CON R E A L I M E N T A C I O N
T 32 -
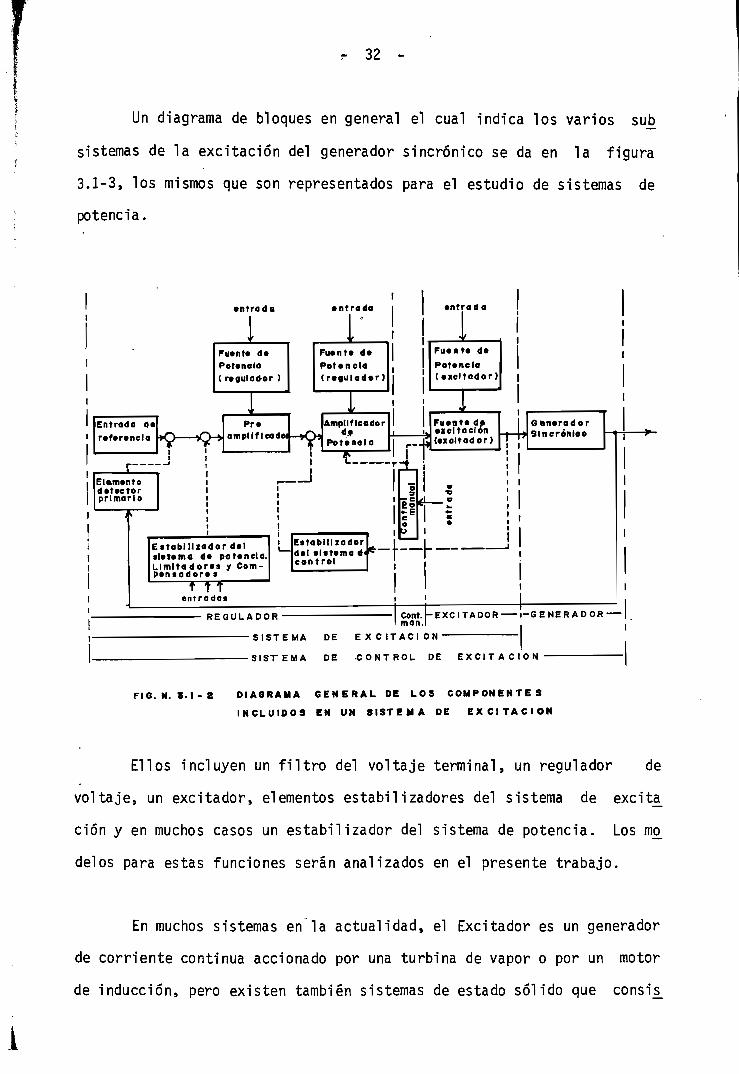
Un diagrama de bloques en general el cual indica los varios sub
sistemas de la excitación del generador sincrónico se da en la figura
3.1-3, los mismos que son representados para el estudio de sistemas de
potencia.
entrado • ntrada •ntrada
it rFuente dePotencio( regulador )
Entrada dereferencia >O O-1
1
r 'Elementodetectorprimarlo
1 ' >
Fuente dePotencia(regulador)
\i
Pro> amplif Icadoi
Estabil izador del! «(eterna de potencia.
Limitadores y Com-pensador» s
^~
i
Ampllfleí
" PotVnel
-J
Estabilizadordel «(«terna dicontrol
T T Tentrados
G U L A D O
idor
a
-1
-
4~1d_
0
r.__
J[Fuente dePotencia( excitador)
Fuente de. excitaciónJ (excitador)
P
0
o
e
Cont. I-EXCITADORman.!
1
j
—
GeneradorSincronice
G E N E R A D O R
'
- S1STE MA
• S I S T EMA
O E E X C I T A C I Ó N -
DE - C O N T R O L OE E X C I T A C I Ó N
FIG.N. 8 .1 -2 D I A G R A M A G E N E R A L DE LOS C O M P O N E N T E S
I N C L U I D O S EN UN S I S T E M A DE E X C I T A C I Ó N
Ellos incluyen un filtro del voltaje terminal, un regulador de
voltaje, un excitador, elementos estabilizadores del sistema de excita_
ción y en muchos casos un estabilizador del sistema de potencia. Los mo_
délos para estas funciones serán analizados en el presente trabajo.
En muchos sistemas en la actualidad, el Excitador es un generador
de corriente continua accionado por una turbina de vapor o por un motor
de inducción, pero existen también sistemas de estado sólido que consis_

- 34 -
En la mayoría de los sistemas modernos el regulador es un contrp_
lador que sensa el voltaje a la salida del generador (y al mismo tiempo
la corriente) y luego inicia la acción de corrección cambiando el control
del excitador al valor deseado. La rapidez del regulador es de gran in^
teres en la estabilidad del generador sincrónico. Porque la gran induc_
tancia en el bobinado de campo del generador hace difícil el rápido cam
bio de la corriente de campo, esto introduce un considerable "retraso"
en la función de control y es uno de los mayores obstáculos que sobrevie^
nen en la designación de un sistema de regulación.
Existe también elementos de control auxiliares que pueden incluir
varios elementos principales. Por ejemplo, un comparador puede ser usa-
| do para poner un límite mínimo de excitación, especialmente en opera-I! ción con factor de potencia en retardo, para prevenir la inestabilidadt
[ debido al débil acoplamiento a través del entrehierro. Otros controles
I auxiliares son algunas veces convenientes para realimentación de veloci_
í dad, frecuencia, etc.I
j 3.2 SISTEMAS DE EXCITACIÓN PRIMITIVOS
li{ Este tipo de sistemas se los puede clasificar como sistemas deI¡ "respuesta lenta".
i| La figura 3.2-1 indica un arreglo que consiste en un excitador
[ principal con control de campo automático o manual. El regulador en es
te caso detecta el nivel de voltaje e incluye un dispositivo mecánico
que cambia el control de la resistencia del reóstato.

.- 35 -
CAMPO DELEXCITADOR
R o¿* to to doC a m p o
t
Control manua l
F i e . N. 8 .2 - I
CONMUTADOR BREAKERDE CAMPO
A N I L L O SCOLECTORES
T»/R
E X C I T A D O R PRINCIPAL CON C O N T R O L DE C A M P O
Un dispositivo semejante con la acción directa del reóstato es el
regulador "SILVERSTAT", y consiste de una bobina de regulación que opera
un imán, el cual actúa girando en una fila de botones de plata sistemáti
camente espaciados en la sección de afuera de reóstato | i» |. En aplica
ción, este dispositivo es como se indica en la figura 3.2-2.
¿1 R o A s t o t o d* campo
campothunt dolExcitador "S ?
¿Reo'stato docampo dolEKeltador
^Reslttencla Pf i ja L]
1
1
$,?'d
Okjj Transformenrrx <i«
I Amortlguai
-
oblna >^• 1 /
Rotlotonela doRoguloc ión
PuontoRectificador^V-n wv 1 1 1 ix
/ — v'" T / c
VAJX^
ito ;
L/^Roslstonclr1* i» .Comp«n*acton
T
Fie . N. > .Z - 2 EXCITADOR PRINCIPAL A U T O E X C I T A D O CON
R E G U L A D O R " S I L V E . R 3 T A T "

- 36 -
En operación, un incremento en el voltaje de salida, del genera-
dor causa un incremento en el voltaje de corriente directa (D.C.)del re£
tificador. Este causa a su vez un incremento en la corriente a través
de la bobina del regulador que mecánicamente opera un solenoide inserta
do en los elementos de la resistencia de campo del excitador. Este redu_
ce el flujo de campo de excitación y el voltaje, en relación con eso rje
\e la corriente de campo en el campo del generador, desde aquí baja el
f voltaje del generador. Dos elementos adicionales distintivos son el
\r de amortiguamiento y el compensador de corriente. El trans^
í formador de amortiguamiento es un "amortiguador" eléctrico o dispositivoi* antifluctuador que amortigua hacia afuera la acción excesiva del moVi-
• miento del macho del imán. El compensador de corriente es usado para
: controlar la división de potencia reactiva entre generadores en paralelo
operando bajo este tipo de control.
El transformador de corriente y la resistencia de compensación in^
troduce una caída de voltaje en el circuito de potencia proporcional a
la corriente de línea. La relación de fase es tal que para corriente re_
trasada (potencia reactiva generada positiva), la caída de voltaje a tra^
vés de la resistencia de compensación sume el voltaje del transformador
de potencial. Esto causa al regulador una bajada del voltaje de excita_
ción por incremento de la corriente retrasada (incremento en la salida
de potencia reactiva) y provee una caída de las características que ase_
gure que la carga de potencia reactiva sea dividida por igual entre gene_
radores en paralelo.
El próximo nivel de complicación en sistemas de excitación sonj
los sistemas con excitador principal y excitador piloto como se indica

- 37 -
en la f igura 3.2-3.
EXCITADOR R*o»toto
EXCITADORPRINCIPAL Anillo*
Colector** -v
*—ish—3r J
Campo d«lExc i tadorPi lo to
F l « . H. >.*-• S I S T E M A EXCITADOR PILOTO Y E X C I T A D O RPRINCI PAL
Estos sistemas tienen una respuesta mucho más rápida que el exci_
tador principal autoexcitado, puesto que el control de campo del excit¿
dor es independiente de la salida de voltaje del excitador. El control
es llevado a cabo en muchos casos de la misma manera que para autoexcita_
ción.
Debido a que la posición del reóstato es electromecánica, la ^
puesta puede ser lenta comparada con sistemas modernos que serán analiza^
dos en los siguientes capítulos.
Los dos tipos de sistemas antes descritos son ejemplos de sist£
mas antiguos y representan directamente en término medio el efecto del
control de excitación.

- 38 -
3.3 REGULADORES DE VOLTAJE
Los reguladores de voltaje constituyen la parte principal de los
Sistemas de Excitación. Este es un dispositivo que sensa los cambios en
el voltaje de salida (y corriente) en el generador sincrónico y causa jj
na acción correctiva para llevar al valor deseado.
Es necesario que el regulador de voltaje sea un sistema proporci£
nal actuando continuamente. Esto significa que cualquier acción correc-
tiva debería ser proporcional a la desviación en el voltaje terminal del
generador desde el valor deseado, por pequeña que sea la desviación.
3.3.1 Reguladores Electromecánicos
El regulador de voltaje de acción directa dado en la figura 3.2-2
es un ejemplo de un regulador electromecánico. En estos sistemas de vq]_
taje de referencia es la tensión de resorte frente al cual el solenoide
debe reaccionar. La respuesta es sinembargo tardía e incluye banda mue£
ta y marcha muerta, debido a la fricción mecánica y a que los accesorios
de ajuste están flojos.
Existen a menudo dos tipos de reguladores electromecánicos: el de
acción directa y el de acción indirecta.
El regulador de acción directa es un tipo de reóstato el cual
trola directamente la excitación del excitador variando la entrada al
circuito de campo del excitador, en cambio el regulador de acción indi-
recta es un tipo de reóstato el cual controla la excitación del excita-
- 39 -
dor por medio de un aparato intermedio que no es considerado como parte
del regulador o del excitador |6|.
Este tipo de regulador usa un relé como elemento sensitivo de vol_
taje; así la referencia es esencialmente un resorte, como en el regula-
dor de acción directa. Este relé opera por control de un reóstato acci£
nado a motor, usualmente conectado entre el excitador piloto y el excita^
dor principal, como en la figura 3.2-3. Este regulador es limitado en
la velocidad de respuesta por varios retardos mecánicos. Una vez que el
relé se cierra acorta la salida de una sección del reóstato, la respues^
ta es bastante rápida en comparación con los reguladores de acción dire£
ta.
Otros tipos de reguladores de acción indirecta emplean un motor
de torque polifásico como un elemento sensitivo de voltaje. En cada uno
de estos dispositivos el torque de salida es proporcional al voltaje nie
dio trifásico. Este torque es balanceado contra un resorte en torsión
tal que cada valor de voltaje corresponda a una diferente posición angu_
lar del rotor. Un contacto montado adherido al rotor responde por cié -
rre de los contactos en el reóstato como los cambios de posición del eje.
En especial se pone contactos cerrados muy rápidos con rápidas acelera -
ciones del rotor, aquello permite respuestas más rápidas que la normal
debido a inesperados cambios de voltaje. La respuesta de éste tipo de
regulador es medianamente rápida, y corrientes de campo muy grandes pue_
den ser controladas que con el regulador de acción directa. Esto es de^
bido a que la "ganancia" de corriente adicional introducida por el excj_
tador piloto es proyectada al excitador principal. El tipo de contacto
de control, sin embargo, tiene banda muerta inherente y éste, acoplado a

- 40 -
la marcha muerta mecánica, constituye una seria desventaja.
3.3.2 Reguladores de Voltaje con Amplificador Rotórico
En los sistemas de control de excitación que utilizan un amplifi_
cador rotórico cambia el campo del excitador principal como el sistema
que se indica en la figura 3.3.2-1 |e|.
En este tipo de sistemas el excitador está formado por un genera_
dor con conmutador de corriente continua. Además tienen un amplificador
rotórico o amplidina en el lazo de realimentación.
El desarrollo de los amplificadores rotóricos y la aplicación de
éstos en los sistemas de excitación es acompañado con el desarrollo de
circuitos sensores de voltaje enteramente estáticos que reemplazan a los
aparatos electromecánicos.
El sistema que se presenta en la figura 3.3.2-1 tiene una caracte^
rística importante, y es que el amplificador rotórico (amplidina) puede
ser desviado para mantenimiento y el generador puede continuar operando
normalmente por regulación manual, a través del reóstato de campo. Esta
conexión es a menudo llamada "boost-buck".
La operación de un sistema de regulación con amplificador rotóri_
co puede ser analizado en la figura 3.3.2-1.
El generador es excitado por un excitador autoexcitado con campo
shunt. El circuito de campo puede ser controlado por la energización de
41 -
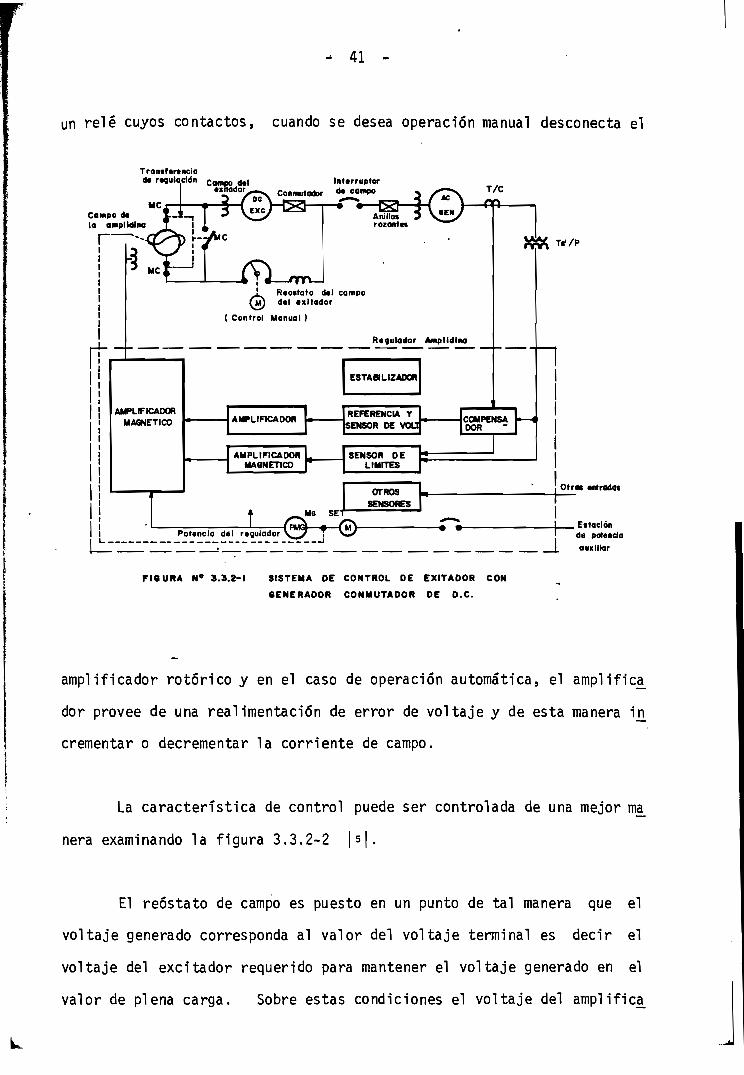
un relé cuyos contactos, cuando se desea operación manual desconecta el
Trontftrtncioá» regulación Interruptor
Conmutador d* camP° T/C
Campo d*la amplldina
r~
Rtostato dil campo(M) del exltodor
( Control Manual )
Regulador Amplldlm
-«---.----™^™-J^ [ 0
FIGURA N° 3.3.2-1 SISTEMA OE CONTROL DE EXITAOOR CON
8ENERADOR CONMUTADOR DE D.C.
amplificador rotórico y en el caso de operación automática, el amplifica^
dor provee de una realimentación de error de voltaje y de esta manera in^
crementar o decrementar la corriente de campo.
La característica de control puede ser controlada de una mejor ma^
ñera examinando la figura 3.3.2-2 |s|.
El reóstato de campo es puesto en un punto de tal manera que el
voltaje generado corresponda al valor del voltaje terminal es decir el
voltaje del excitador requerido para mantener el voltaje generado en el
valor de plena carga. Sobre estas condiciones el voltaje del amplifica^

o o 3 < O rt
CU C_l.
ft> lo _^
-"% 3 _j.
rt
fD lo 3 Oiv
(/i cr CU C
_i.
o (/i • m —t
-S cu 3 ia o o.
O) < o rt CU C_i.
fD fD 3 (D — i
CU 3 •a _i.
-b — i.
O 0> a.
o -¡
•a c a> i/) rt
Cu V) 3 o 3- o 3 CU\
~S OJ\
D
_j*
O.
Cu (/)
XI c fu (D X O _J. rt
CU CX
O -s fD in a.
n> 10 _j« 3 _j.
_j
CU -J Q.
fu 10 _j.
(O 3 CU O _i.
0»
3 TJ fD -s O
cr «i.
fD 3»
C 3 -*
0» 0 c+ 0 -s 3 << «1.
3 •a o -i rt Cu 3 rt, fD u ro X 0 _J.rt
QJ a.
o ~í fD en 0 O 3 _^
-"»
3 rt fD (/)
CU _^
rt O tn rt _i.
fD 3 fD 3 -s ,fD <"
JO c fD — J
Cu O O 3 M rt cu 3 rt
fD a.
fD rt
—1*
fD 3 •0 O O.
fD ^_J
Cu CU 3 T3 ~_
j_j.
Q.
3 Cu • m __i
< o _j
rt
CU C_J
.
fD — i
->\
rt
fD fD W rt CU 3 i
rt
fD CU — J
Cu O O 3 10 rt
Cu 3 rt
fD Q.
fD rt
_j.
fD 3 •o o a.
fD fD X o — !•
rt
CU Q.
0 -s _j
Cu O c CU — J
fD (/) 3 c o 3- o 3 Cu (/I
ta i CU 3 D-
fD
r+ Cu 3 o a. fD -s CU Q.
o Cu 3 fD 3 C Q.
O O • tn • r~ 01 < fD _J
O O «J.
o.
CU Q.
Q.
fD -s fD (/) •a c fD (/) r+ Cu fD U)
£X (D cr _i.
a.
o ID -s cu 3 CL
fD 3 ,n> =>
r— o 1/1 t/i _j.
t/> r+ fD 3 CU I/) a.
fD CU 3 •a ~—*
«j.
-h «j.
O CU a.
o -s -s 0 r+ Ov
-s — i.
O o r+ «j.
fD 3 fD 3 cr 3 -s CU a.
_i.
o a.
fD -s fD 10 •o £T fD </>
•1
< o — J
ft> Cu t__t.
m -s (D -h O -s N CU CX
O
—C
TO O oí
{•+—
•
-h 3 ro m _J
Cuv
-s fD CU CT
CU r «-
O fD «J
< Cu __
J
O -s CX
fD < O ^_J
J-f-
Cu C_i
>fD C
XÍD t/í fD CU CX
O
t< {/I fD O.
fD 3 •u.
3 Cu -s fD (O Ov
3 CX
fD
fD 10 __j
__j
CU 3 Cu CX
CU -s fD IQ —!•
Ov
3 CX
fD < O __
J
rt
CU C_J
*<D O T3 C fD (/> rt
O
— cr c n 5^" —
• d 13 t/1 — i.
3 — j
CU -s -s Cu IM O 3 CU 3 fD 3 rt O f*l
|fD
CX
O -s to _J.
3 0 -s Ov
3 ^«
O O • ^>
(/) —
"V m Cuv
-s fD Cu to O 3 cr -s fD CU CX
CU
TJ O -s (D 3 O _j>
3 CU CX
fD __J
< o> __J
o -s CX
fD < O — J
ct"
Cu C_j
*fD
< O ~_J
rt
Cu Cj.
fD CX
fD _J
fD X O <"~t
"C
U CX o -s fD __l
O c Cu _—
J
-s fD D.
E O fD __j
cu o 0 -s -s _J.
fD 3 f+ fu CX
fD O CU 3 •a o ex fD —
1
ta fu 3 ai -s CU 1
o -J,
Ov
3 CX
fu _J
Cu r> o -s -s fD 3 f-f-
fD CX
fD O cu 3 T) O fD 3 fD _j
O cu 3 TJ O CX
fD ««1
fD X 0 _J.
rt CU CX o -s rn rt
0 -s fD CX
C o fD fD — '
< O __
j
rt CU
r i.
fD O.
fD fD O (- CU fD to rt
CU
•(/> C cr —
i.C
XC
U
t^ fD CU 3 TJ
— J*
-h O CU CX
O -s -f O rt
Ov
-s O o 0 CU C I/)
CU
_J
Cu -s ro ex c o 1
CX c. o _J. o.
CU c< fD __r
< o _J rt
Cu C_j
»fD IQ ro 3 ro -s Cu a.
o 0 o 3 ro 3 N CU CU l/l
C cr -s * m .0 —I* -s o c _
J* rt O {
/) ro
• 3 to O
• -s C
X ro
ex 0 -$ -s o rt Ov
-i 0 O ro (/> o ro -s 0 • ^> 3-
o -s Cu to c. TJ O 3 — i. ro 3 CX o JO E ro _«l
CU o cu -s ta CU ex ro (O ro 3 ro -5 Cu a.
o -s ro 10 -s ro
VO
LT
AJE
CA
MP
Ote nt
r o
m *
ca
n >*
ot
•<
o c
-P»
ro

- 43 -
rotórico en sistemas de este tipo es a menudo comparable con el rango de
voltaje del excitador principal y el voltaje oscilante del amplificador
cambia rápidamente tratando de regular el sistema.
3.3.3 Reguladores de Voltaje con Amplificador Magnético
Estos sistemas son dispositivos de amplificación estáticos, reem-
plazan a los sistemas de amplificador rotórico. Usualmente el amplifica^
dor magnético consiste en un reactor saturable y un rectificador. Este
es esencialmente un aparato amplificador con la ventaja de no tener pa_r
tes rotóricas, tener larga vida y fuerte construcción.
Es restringido a bajas o moderadas frecuencias, pero no es una
desventaja en grandes aplicaciones.
Básicamente el amplificador magnético es similar al indicado en
la figura 3.3.3-1. La corriente que fluye a través de la carga es básj_
camente limitada por la gran inductancia del bobinado principal del nú-
cleo saturable. A medida que el núcleo llega a saturarse, sin embargo
la corriente salta a un gran valor limitado solamente por la resistencia
de carga.
í Fuente de Tolterra
I JH'H'IITP ''iiiniiinummp ,
Núcleo Saturable
I Carga
Bobinadode control 1
F I G U R A NS 3.3.3rl AMPLIFICADOR M A G N É T I C O

- 44 -
Aplicando una pequeña señal (baja potencia) al bobinado de con -
trol, se puede controlar el punto de disparo en cada ciclo de voltaje (o
corriente), y desde aquí la corriente media de carga.
Este distintivo de controlar una gran corriente de salida por rrie
dio de una baja corriente de control, es la esencia de cualquier ampli-
ficador.
Un tipo de regulador que usa un amplificador magnético, es dado
en el diagrama de la figura 3.3.2-1. Aquí el amplificador magnético es
usado como amplificador de una señal de error de voltaje a un nivel de
potencia satisfactorio cuyo campo se abastece desde un amplificador rotó
rico. El amplificador rotórico es localizado en serie con el campo del
excitador en la conexión usual de elevar-oponer ("boost-buck"). Un im
portante distintivo de este sistema es que el amplificador magnético es
relativamente insensible a variaciones de voltaje de línea y frecuencia,
haciendo este tipo de regulador favorable para localizaciones alejadas.
Otro sistema con un excitador similar es el que se presenta en la
figura 3.3.3-2 |e|, donde el amplificador es un amplificador magnético
estático, la potencia abastecida se deriva de un magneto permanente y un
grupo motor-generador. Los amplificadores de potencia abastecen directa_
mente al excitador principal. Es de notarse sin embargo que el excita-
dor principal tiene 2 bobinados de campo uno para "elevar" y otro para
"oponerse" a las correcciones. El excitador principal también tiene un
campo que provee autoexcitación por medio de un reóstato de campo contro
lado, el mismo que puede seguir operando cuando los amplificadores magné^
ticos están fuera de servicio.

- 45 -
Conmutador
Control de candel excitador
Transferenciad*l regulador
(>
0 '"1-
!~Ht2X) ""i' ] ss
_._!_!_MELIFICADO*DE POTENCIAMAe-A-STAT
i
~|
^ ra/HST
})ntrqlAUQI
d«« «
ESTÁBIL!ZAOOR *"
UE7ct Am)DE SEÑAL
ca%t>TÍ/A^""T7\8ENAnillos ^Clxrozantes
r*1
1Potenciodel regulad!
¿V.
Bff^r*11
ISmi?•EHSÚR
DELIMITES
OTROS
SENSORES
>r
Mw— ("V
. T/Ci rr*
, ICÓN[SAO
« 1
•
±
«TI)H |
¿ tí/f
1é
lAJUSTAOORlIDE VOLTAJE |
Elementos del sistemade regulación
•
Otras entradas
Estación auxlllar de potencia
FISURA N> 3.9.3-2 SISTEMAS DE CONTROL DE EXCITACIÓN CON EXITADOR
DE CONTINUA SENERADOR- CONMUTADOR
3.3.4 Reguladores de Voltaje de Estado Sólido
Los elementos esenciales de este regulador son indicados en la fi_
gura 3.3.4-1.
La mayoría de los componentes son:
- Componentes estáticos de potencia que consisten de 3 transfor-
madores de potencia monofásicos (T'S/P) y 3 transformadores saturables
monofásicos de corriente (T's/CS).
- El rectificador de potencia consiste en 2 rectificadores trifá
si eos de onda completa tipo puente.
- Un regulador de voltaje de corriente alterna que provee con-
trol automático para regulación del voltaje terminal generado .

- 46 -
- Un regulador de corriente continua que provee el control ma
nual para la regulación de la corriente de campo del generador |?|.
Campo delexcitador T's/CS
T'«/P
Ajuste devoltaje directo W Ajuste del
voltaje alterno
F I G U R A N£ 3.3.4-1 S I S T E M A DE C O N T R O L ESTÁTICO
En el sistema automático el regulador de voltaje controla el
lo de disparo de los rectificadores, para mantener un determinado volta^
je terminal en el generador.
El regulador recibe la señal promedio del voltaje trifásico, tonia_
do desde la salida del generador y es continuamente comparada a un vol-
taje de referencia de un diodo zener para formar una señal de error. Es_
ta señal de error es amplificada y aplicada a la compuerta del circuito
rectificador de potencia, de tal forma que cambie el voltaje terminal
del generador en la dirección adecuada. De esta manera, al controlar el
ángulo de conducción de los rectificadores se puede mantener un determi-
nado voltaje en los terminales del generador.

- 47 -
De la misma forma se tiene para el regulador de corriente conti -
nua, en el cual se compara una señal de realimentación proporcional a la
corriente de campo con un voltaje de referencia dado.
3.4 EXCITADOR DE EXCITACIÓN INDEPENDIENTE
Como se indicó en el numeral 3.1 de este capítulo el excitador en
muchos sistemas es un generador de corriente continua, el mismo que pu£
de ser de excitación independiente o autoexcitado.
Para efectos de la modelación del excitador el modelo que se toma
como referencia se indica en el diagrama de la figura 3.4-1.
Rf
If
Lf .
Excitador pilota Exltodor principal
F I S U R A N» 3.4-1 EXCITADOR DE EXCITACIÓN INDEPENDIENTE
El voltaje de campo del excitador será:
Es = If . Rf + Lf . dlfdt
Ec. 3.4-1
en donde:
Rf = Resistencia del devanado de campo.
Lf = Inductancia del circuito de campo.
If = Corriente del campo del excitador.

- 48 -
El voltaje del excitador piloto Es es tomado como un valor cons
tante.
El voltaje generado Ex es una función no lineal de la corriente
de campo If cuya variación en función de la corriente de campo se presen_
ta en la figura 3.4-2.
EX
EXo
Ifo If
F I G U R A N2 3.4-2 CURVA DE SATURACIÓN CON CARGADEL EXCITADOR
La relación entre Ex e If está dada por:
If - A If Ec. 3.4-2
Como se indica en la figura 3.4-2, Rg es la pendiente de la cur
va de saturación del excitador con carga cerca de Ex = 0. A If repre-
senta el incremento de corriente debido a la saturación y está relaciona^
da con la función de saturación Se (en Amp/volt).
A If = Se . Ex Ec. 3.4-3
- 49 -
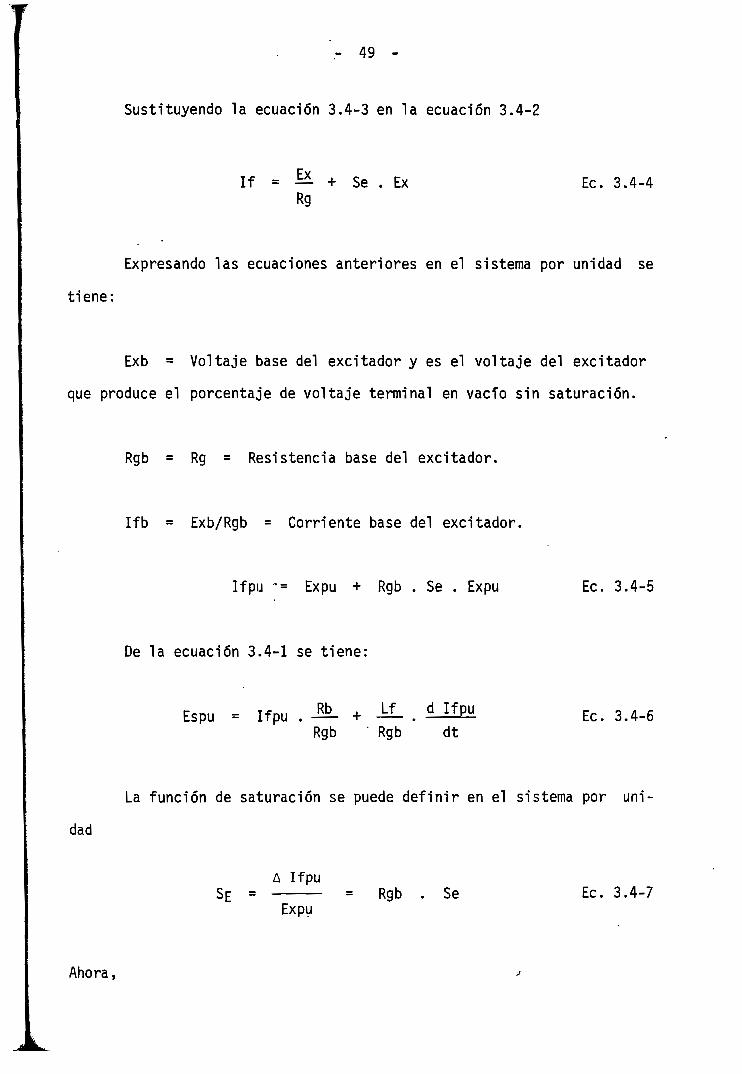
Sustituyendo la ecuación 3.4-3 en la ecuación 3.4-2
If = — + Se . Ex Ec. 3.4-4Rg
Expresando las ecuaciones anteriores en el sistema por unidad se
tiene:
Exb = Voltaje base del excitador y es el voltaje del excitador
que produce el porcentaje de voltaje terminal en vacío sin saturación.
Rgb = Rg = Resistencia base del excitador.
Ifb = Exb/Rgb = Corriente base del excitador.
Ifpu ~= Expu + Rgb . Se . Expu Ec. 3.4-5
De la ecuación 3.4-1 se tiene:
Espu = Ifpu . -BL + IL . 4 Ec. 3.4-6Rgb ' Rgb dt
La función de saturación se puede definir en el sistema por uni-
dad
A IfpuSE = = Rgb . S e Ec. 3.4-7
Expu
Ahora,
i

- 50 -
d Ifpu d Ifpu d Expu
dt d Expu dtEc. 3.4-8
Sustituyendo las ecuaciones 3.4-5, 3.4-7, 3.4-8 en la ecuación
3.4-6,
Espu = (Expu + Rgb . -^ . Expu) -BL + L _ dExjDu
Rgb Rgb Rgb dExpu dt
Espu = (Expu + SE. Expu) . - + dlf dExDuRgb Rgb dExpu dt
Ec. 3.4-9
Sea
Lfpu = Lf . dlfpu
dExpu Ex = Exo Ec.3.4-10
donde Exo es el valor de Ex en el punto de operación, luego:
Espu = RbRgb
Expu + SE Expu Lfpu dExpuRgb dt
. Espu = [Expu + s . Expu] + m
Rf Rf dt
Lf£u ^ d
Rf dt Rf

- 51 -
Sea
TE = LfpuRf
d Expu _ Espu Rgb _ Expudt TE " Rf TE
+ s » Ec.3.4-11
3.5 EXCITADOR AUTOEXCITADO
Rf
-v
Eo
1 +
EX
F I G U R A N2 S.S-I EXCITADOR AUTOEXCITADO
Generador dealterna
Asumiendo que Ea representa el voltaje de un amplificador en Sj§_
rie con el campo shunt del excitador o un equivalente de voltaje serie
en un excitador muí ti devanado.'
Espu = Expu + Eapu Ec. 3.5-1
Es = Rf . If + L dlfdt
Ec. 3.5-2
Por igual procedimiento que el numeral anterior se tiene que:

- 52 -
Espu = — (Expu + SE . Expu) + 2ü . 4É*Ey.Rgb Rgb dt
Espu = (Expu + SE . Expu) + . íRf Rf dt
Ec. 3.5-4
Reemplazando la ecuación 3.5-1 en la ecuación 3.5-4,
Expu + SE.Expu + . . . (£xpu + Eapu)
Rf dt Rf
Rf dr Rf
(Expu + Eapu) _ Expu (1 +
TE LfpuRf
dt TE.Rf TE.Rf TE
d Expu _ Rgb Eapu _ Expu /» + . Rgb
dt Rf ' TE TE RfEc. 3.5-5
La ecuación 3.5-5 representa la variación de voltaje del excita
dor aplicado al campo del generador sincrónico.

- 5:3 -
3.6 FUNCIÓN DE SATURACIÓN DEL EXCITADOR
La función de saturación SE del excitador se define como un múl_
tipio en por unidad del voltaje de salida del excitador que representa
el incremento de la excitación del excitador requerido a causa de la sa-
turación. La figura 3.6-1 ilustra el cálculo de un valor particular de
SE-
Para un voltaje de salida del excitador, los valores de Ai,Bi, y
Ci son definidos como la excitación del excitador para producir el volta^
je de salida en las curvas de saturación con carga de resistencia cons -
tante, en la curva de vacio y en la línea de entredi erro respectivamente.
saturación con cargade resistencia constante
CORRIENTE DE CAMPODEL EXCITADOR (P.U)
F I G U R A N2 3.6-1 C A R A C T E R Í S T I C A S DE SATURACIÓN DELEXCITADOR

- 54 -
La curva de saturación con carga de resistencia constante es uti-
lizada para determinar SE en excitadores formados de un conmutador de
corriente continua. SE viene determinada por:
SE =
La curva de saturación sin carga es usada para definir SE para
excitadores formados por al ternador-recti f i cador y en este caso SE vi£
ne dado por:
CiSE =
Bi
La razón de utilizar la curva de saturación sin carga para excita^
dores al ternador-recti f i cador es porque los efectos de regulación de ex
citador son calculados por la inclusión en el modelo de las caídas de vol_
taje por reactancia sincrónica y reactancia de conmutación.
Puesto que los efectos de saturación son más significativos en vol_
tajes al tos j el valor de SE debe ser especificado en o cerca del volta
je máximo del excitador y un valor bajo comúnmente del 75% de este nivel.
En general, la función de saturación puede ser definida por dos
puntos. El procedimiento es establecer dos puntos de voltaje los cuales
especifican SE y luego usar estos como datos para calcular SE-
Una posible forma funcional de la función de saturación es:
i

- 55 -
SE = AExc . e
Donde AEXC y BEXC son constantes que determinan la función de
saturación y son definidas especificando el valor de SE para dos puntos
en la curva de saturación.
Refiriéndose a la figura 3.6.-2 se definen las siguientes constají
tes en el valor de voltaje máximo, 0.75 del valor máximo y plena carga.
= ~~T~~D
SE0.75máx= E - F
F
c C - DSEFL = Ec. 3.6-1
Xu
oXu
!¿o
MAX
0.75 MAX
± PLENAZ CARGA(EUl
o>
D C F B E A CORRIENTE DE CAMPO
F I G U R A H2 3.6-2 C U R V A DE SATURACIÓN DEL EXCITADOR O.C.

- 56 -
Tomando como base el voltaje de plena carga (EXFI_) se tiene:
X máx-Ex F.L
B~~D
Ec. 3.6-2
También se puede determinar
JL = 1F 3
Exmáx
F = 0.75 . D . E*máx Ec. 3.6-3
Reemplazando las ecuaciones 3.6-2 y 3.6-3 en la ecuación 3.6-1 se
tiene:
SE máxA - B
D ' E*máx
E - FSE max
'75 ' D'E*máxEc. 3.6-4
Se define a la función de saturación de la siguiente forma:
SE = AExc • eBExc-
Ec. 3.6-5
La cual da la saturación aproximada para cualquier valor de EX-
I

- 57 -
Suponiendo que son dados los valores numéricos de la saturación,
sEmáx y SE0.75 máx Para E™máx y E™Q.7S máx Despectivamente se
puede determinar los valores desconocidos de A£XC y BEXC.
EmáxmSX
- B BExc.Exmáx= AExc ' e
. ExmáxEc. 3.6-6
y para Ex = 0.75 EXmáx
SE0.75 máx4 (E - F)
3 D. EX!= AEXC • e
BExc
máx
c o c -iEc. 3.6-7
Resolviendo las ecuaciones 3.6-6 y 3.6-7 se obtiene:
AEXC =J5 máx
SE3 máx
BExc . 1nEx,máx SE0.75 máx
Ec. 3.6-8
L

- 58 -
C A P I T U L O I V
SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
4.1 DESCRIPCIÓN DE LOS SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
Los sistemas de excitación de corriente continua tienen como
fuente de excitación para el generador sincrónico un excitador con con-
mutador de corriente continua.
En lo que se refiere a los excitadores de corriente continua son
de interés los excitadores de excitación independiente, autoexcttados y
los autoexcitados con amplificador rotativo. La mayoría de los excitad£
res son autoexcitados y el regulador de voltaje opera comunmente en el
modo denominado "buck-boost".
Los sistemas de excitación que se analizarán son sistemas de e><
citadores con conmutador de corriente continua controlados por campo y
la acción continua de los reguladores de voltaje.
Estos tipos de sistemas de excitación son de alta ganancia y rá_
pida acción comparados con los sistemas primitivos citados en el numeral
3.2 del Capítulo III; pues, estos son sistemas de excitación en que la
acción de los reguladores de voltaje no es continua.

r - 59 -
4.2 MODELO DEL SISTEMA DE EXCITACIÓN DE CORRIENTE CONTINUA CON LIMITES
DEL REGULADOR DE VOLTAJE ESPECÍFICOS
El modelo, que se describe en el diagrama de bloques de la figu^
ra Ns 4.2-1 es usado para representar excitadores controlados por campo
con conmutador de corriente continua con la constante actuación de los
reguladores de voltaje, especialmente la actuación directa de reóstatos,
ciertos tipos de amplificadores rotóricos y amplificadores magnéticos.
Por facilidad estos sistemas se denominan sistemas de excitación tipo
DC1, de acuerdo con la denominación del IEEE. l i o l .
ción:
Algunos ejemplos de este tipo de reguladores se da a continua_
GENERAL ELECTRIC.- Regulador Amplidina
WESTINGHOUSE.- Regulador Mag - A - Stat
Regulador Silvérstat
VMMAX
VERR
r1
' +.TC
i 4 »TB .
VER KAi -i- «TA
VRMIN
R E G U L A D O R
ESTABIL IZADOR
FD
,K
»TF
E X C I T A D O R
1
Ft«. N. 4 . 1 - 1 S I S T E M A S DE E X C I T A C I Ó N TIPO O C I
E X C I T A D O R CON CONMUTADOR DE CORRIENTECONTINUA

- 60 -
4.2.1 Modelo del Transductor de Voltaje Terminal del Generador Sincróni-
co
El diagrama de bloques del transductor de voltaje terminal se ijn
dica en la f igura H° 4.2.1-1. Este modelo es común para todos los dis-
tintos tipos de sistemas de excitación.
vt
VREF
FIO. N. 4.2.1-1 FILTRO DEL VOLTAJE T E R M I N A L
El voltaje terminal del generador sincrónico es sensado y usuaj_
mente reducido a un valor continuo.
El filtro asociado con el transductor de voltaje puede ser muy
complejo, pero para propósitos de estudio e| filtro es una constante de
tiempo simple (TR).. Para la mayoría de sistemas, TR es muy pequeña y pue_
de ser considerada como un valor de cero. |B, ja|
La salida del transductor de voltaje terminal es comparada con un
voltaje de referencia el mismo que representa el ajuste del voltaje tennj_
nal. El voltaje de referencia es calculado para satisfacer las condicio_
nes iniciales de operación. Debería, por lo tanto, dar un valor único a
la condición de carga del generador.
La señal de error resultante VERR es amplificada como se des-
cribe en modelos apropiados de sistemas de excitación que proveen un voj_

- 61 -
taje de campo y un subsecuente voltaje terminal que satisface las ecua-
ciones de lazo cerrado en estado estable.
4.2.2 Modelo del Sistema de Excitación
La entrada principal en el modelo que se representa en la figu-
ra N£ 4.2-1 es la señal de error del voltaje terminal (VERR) que viene
del modelo representado en la figura 4.2.1-1.
La realimentación del estabilizador del sistema de excitación
(Vp) es restada y la señal V^ del estabilizador del sistema de potencia
es sumada a VERR.
En estado estable V<- y VF son cero, quedando solamente la señal
de error de voltaje terminal. La señal resultante es amplificada en el
regulador de voltaje. La mayor constante de tiempo T y ganancia K«, a_
sociadas con el regulador de voltaje son incorporadas en los límites "non-
windup" 1 1 0 1 de saturación.
Estos reguladores de voltaje utilizan fuentes de potencia que
son esencialmente inafectados por oscilaciones cortas y pequeñas en el
generador o en entradas auxiliares. Las constantes de tiempo TC y Tg
pueden ser usadas en el modelo equivalente como constantes de tiempo i_n
herentes en el regulador de voltaje; pero estas constantes de tiempo son
bastante pequeñas, que para efectos de la modelación se desprecian.
La salida del regulador de voltaje (VR), es utilizada en el con-
trol del excitador, el cual puede ser de excitación independiente o aut£

r 62 -
excitado.
Cuando se utiliza un sistema de excitación con excitador autoex^
citado la constante K£ representa el ajuste del reostato del campo shunt.
Como se indicó anteriormente la mayoría de los excitadores uti-
liza campos shunt autoexcitados con el regulador de voltaje operando en
el modo "buck-boost" (excitador autoexcitado con amplificador rotórico).
El regulador de voltaje opera manualmente hasta que el voltaje de sali-
da del regulador sea cero. Esto puede ser simulado por la selección del
valor de la constante K^ tal que satisfaga las condiciones iniciales con
VR en el valor cero.
El término Sr representa la saturación del excitador descrito en
el Capítulo III, este valor es una función del voltaje de salida del e:x
citador Epg. La señal Vp que se deriva de la señal de voltaje EpD es u^
til izada para proveer la estabilización del sistema de excitación.
Esta señal de realimentación es usada parcialmente para compen_
sar la constante de tiempo del excitador y permitir una operación esta-
ble del sistema de control de excitación con altas ganancias del regula_
dor en estado estable |9¡.
Esta realimentación es requerida para operación estable fuera
de línea por muchos sistemas de excitación los cuales tienen constantes
de tiempo significantes.

- 63 -
4.3 REPRESENTACIÓN MATEMÁTICA
Del diagrama de bloques presentado en la figura 4.2-1 se reali-
za el análisis matemático para cada uno de los componentes del sistema
de excitación.
ANÁLISIS DEL EXCITADOR.-
La función de transferencia de un sistema cualquiera con reali-
mentación está definida por: |a|
Gis)FT = Ec. 4.3-1
1 l+GCs).H(s)
Donde F,- está dada por la relación entre la señal de s-alida y la
señal de entrada
6(s) = —— Ec. 4.3-2s T E
H(s) = S + K Ec. 4.3-3
Reemplazando las ecuaciones 4.3-2 y 4.3-3 en 4.3-1 se obtiene:
T VR
Pasando a variables de estado la expresión anterior:
- 64 -
EFD'TE + EFD-SE + KE EFD = VR
EFD Ec. 4.3-4
La ecuación 4.3-4 determina el modelo simplificado del excita -
dor.
Si se compara con las ecuaciones 3.4-11 y 3.5-5 se observa que
efectivamente corresponde al modelo simplificado del excitador.
Para el caso del excitador de excitación independiente
V = EV L spu
EFD = Expu
S = S
Para el caso del excitador autoexitado se tiene:
K j.M = -SÍ. EVR Rf ' a

- 65 -
FD ~ xpu
TE " Rf
R
Í
Continuando con el análisis del diagrama de la figura 4.2.1-1
Vi 1
Vt 1 + s TR
Considerando la constante de tiempo TR de valor cero se obtiene:
Vi = Vt Ec. 4.3-5
VERR - VREp - Vi Ec. 4.3-6
ANÁLISIS DEL REGULADOR
Suponiendo que las constantes de tiempo T~ y TR son cero y que
la señal V<. = O puesto que no simulará el estabilizador del sistema de
potencia se obtiene:
VR . KA
ER
T 66 -
V R T A + V R ' KAVER Ec. 4.3-7
K, VRV = — V - —VR T. VER T.
M MEc. 4.3-8
V = V + V - VVER VS VERR VF Ec. 4.3-9
Reemplazando las ecuaciones 4.3-6 en 4.3-9 y a su vez en la e-
cuación 4.3-8 con V<- = O se tiene:
K. VDV* = — (V - Vi - V ) - —VR T UREF V1 V T Ec.4.3-10
A .
VR = r VREFK I RLh V -hEc. 4.3-11
f =
0 Sí VR ' VRMAX
0 S1 VR = VRMIN
S1 VRMIN < VR < VRMAX

- 67 -
ANÁLISIS DEL ESTABILIZADOR
S KFEFD 1 + s TF
VF
F * ^F• E - - Ec- 4-3-12
Reemplazando la ecuación 4.3-5 en la ecuación 4.3-12 se obtiene
KF VR EFR VFV • E(TE--T (SE + KE^-T^IE IE t t IF
V \f \
V = -=^r- \ T- r EFn (SF + KF) - T¿- Ec. 4.3-13I | _. I r t\U L U I r - .
Luego el grupo de ecuaciones que determinan los sistemas tipo
DC1 será:
1 ^FVr = O.VX - v- ll ^ hF - t - T F T R - T

- 68 -
Ec. 4.3-14
4.4 MODELO DEL SISTEMA DE EXCITACIÓN DE CORRIENTE CONTINUA CON LIMITES
DEL REGULADOR DE VOLTAJE PROPORCIONALES AL VOLTAJE TERMINAL DEL GE
NERADOR SINCRÓNICO
Estos se denominan sistemas de excitación tipo DC2 de acuerdo
con el IEEE para efectos de simulación.
El modelo indicado en la figura N2 4.4-1 representa
VERR FD
R E G U L A D O R
E3TAB I LIZADOR
l«. N. 4 . 4 - 1 S I S T E M A S DE E X C I T A C I Ó N TIPO D C t

,- 69 -
los excitadores con conmutador de corriente continua controlados por cam
po con los reguladores de voltaje actuando continuamente teniendo abaste^
cimientos desde el generador sincrónico.
Estos sistemas de excitación difieren de los sistemas de excita
ción tipo DC1 solamente en los límites de salida del regulador de volta
je los cuales son ahora proporcionales al voltaje terminal del generador
sincrónico. Son representativos en estado sólido, pues rectificadores
controlados reemplazan de varias formas a equipos viejos de amplificad£
res rotativos y mecánicos.
4.5 REPRESENTACIÓN MATEMÁTICA
Puesto que estos sistemas son similares a los sistemas de exci^
tación tipo DC1 las ecuaciones que determinan este tipo de sistemas s
rán:
VF K KF(SF+K,)
VF - ° - T V - r T - EFD
K K Kv* = - / v. - J. v - J- . VR + o + J- vR TA * TA F TA R TA
EFD - ° + ° + VR - ~ ' EFD

- 70 -
Teniendo que cumplirse para el regulador de voltaje las siguiera
tes condiciones:
- f
f '
VR ' Vt ' VRMAX
VR ' Vt ' VRMIN
Vt ' VRMIN Vt.'VRMAX

- 71 -
C A P I T U L O V
SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
5.1 DESCRIPCIÓN DE LOS SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
Con el advenimiento de la tecnología de estado sólido y la disp£
nibilidad de rectificadores de alta corriente ha sido factible que se de^
sarrollen los sistemas de excitación de corriente alterna.
En estos sistemas el excitador es un generador de corriente al-
terna cuyo voltaje de salida es rectificado para proveer la excitación
requerida por el campo del generador sincrónico. El circuito de con-
trol para estas unidades es en la mayoría de los casos de estado sólido,
y sobre todo la respuesta es bastante rápida. Los rectificadores que
proveen el voltaje continuo necesario para el campo del generador sincró_
nico pueden ser rotativos o estáticos.
Los sistemas a estudiarse son sistemas en los que el rectifica-
dor es rotativo, este tipo de sistemas cómo el que se presenta en la fj_
gura N£ 5.1-1 es el único sistema que no tiene escobillas "brushless";
es decir, no necesita de anillos rozantes ya que el alternador del excj_
tador y los diodos rectificadores están rotando con el eje. El sistema
incorpora un generador piloto de imán permanente llamado PMG, | e | , con
un imán permanente que abastece el campo (estático) del alternador del
excitador (rotativo). Así, todos los acoplamientos entre los componen-
tes estáticos y rotativos son electromagnéticos.
- 72 -
Elemtntos rotativos
Breokerde excitach i
T/C
<o1 1
Amplificador d« potwicia
1 ¿J '^ ¡1 CIRCUITO |j DE DISPARO j1 , i ...m .. — l
Control f Jmanualf 1 1
_ ¡COMPENSADOR 1®— I BASE !
L J
. Traspaso de regulador
r ^ — ~~
OíTO
Dtrivocldn 1
i_ J REGULADOR
•í
! ! ESTAB.LI ¡ ¡«EFERENCIAj j 1-~ |
! ZADOR " ! r— Í Y «ENS°R \- ÍCOMPENSADORL-i OE VOLTAJEr
! ! i !
¡AMPLIFIC. f- j 8ENSOfi !«
MEZCLADOR)»—— 0£ L(||,,TES
Of SEÑAL L L , .• L _ 1*1 i r
- --» Elemí| 1 OTROS l <
•
¿Ts'/P
r — t— ,1 COMPENSADOR'
H DE ,L VOLTAJE J
ntos del sistemoe regulación
• ¡ SENSORES \*
Otr
os
entra
dos
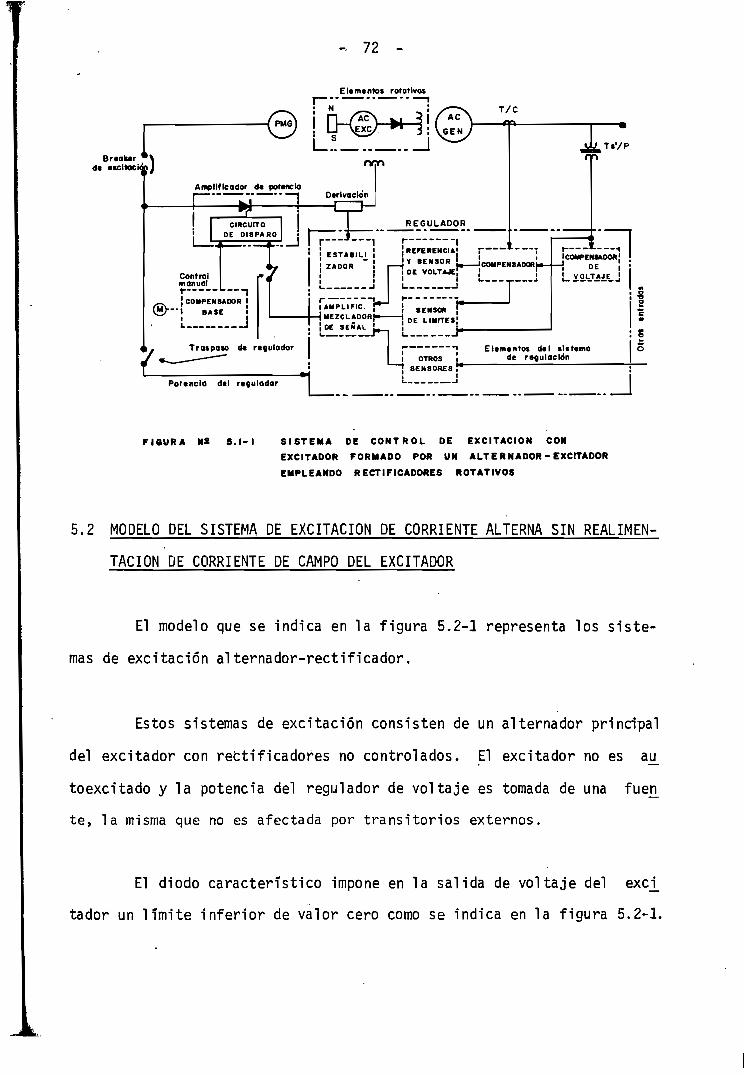
Potencia del regulador IFiaURA NA S.l-l S ISTEMA DE C O N T R O L DE EXCITACIÓN CON
EXCITADOR FORMADO POR UN ALTERNADOR - EXCITADOR
EMPLEANDO RECTIFICADORES ROTATIVOS
5.2 MODELO DEL SISTEMA DE EXCITACIÓN DE CORRIENTE ALTERNA SIN REALIMEN-
TACION DE CORRIENTE DE CAMPO DEL EXCITADOR
El modelo que se indica en la figura 5.2-1 representa los siste-
mas de excitación alternador-rectificador.
Estos sistemas de excitación consisten de un alternador principal
del excitador con rectificadores no controlados. El excitador no es au^
toexcitado y la potencia del regulador de voltaje es tomada de una
te, la misma que no es afectada por transitorios externos.
El diodo característico impone en la salida de voltaje del exci_
tador un límite inferior de valor cero como se indica en la figura 5.2-1.
1

- 73 -
VRmax
1+ »TC1+ STB
KA1+ sT*
VRmln
REGULADOR
ESTABILIZADOR
\R 1
' iTeV
.JRECTIFICADOR
FE/?5\J ALTERNADO
^r:,. EXCITADOR
F Lfr^
R DEL
^FEX
FEx: f.(lN)
i
IN
lw - KcrFD1W VE
1
IFD
EFD
F I S U R A NS. 9.2-1 SISTEMA DE EXCITACIÓN TIPO AC1SISTEMA DE EXCITACIÓN ALTERNADOR-RECTIFICADORCON RECTIFICADORES NO CONTROLADOS
Este modelo es aplicable para simular los sistemas de excitación
"BRUSHLESS" (Sin escobillas).
Para el estudio de estabilidad de los grandes sistemas de potejí
cia, el alternador del excitador puede ser representado por el modelo
simplificado analizado en el presente estudio.
Los sistemas de excitación sin realimentación de corriente decarn
po del excitador, se los denomina sistemas de excitación tipo AC1 según
el IEEE 1 1 0 1 , verdaderamente, estos sistemas si tienen realimentación de
corriente de campo pues, se incluye en el efecto desmagnetizante de la
corriente de carga ( I ) -
Este efecto en la dinámica del voltaje de salida del alternador
del excitador es tomado en cuenta por el camino de realimentación el cual
- 74 -
incluye la constante IC. Esta constante es función del alternador del ex
citador y de la reactancia transitoria.
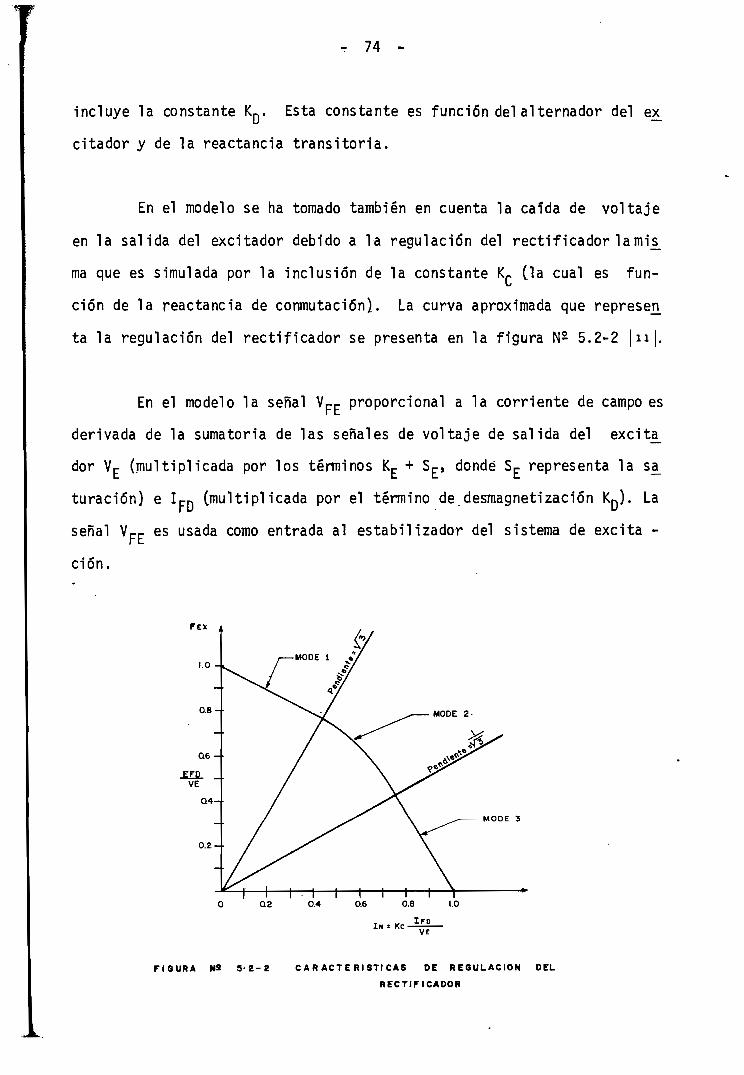
En el modelo se ha tomado también en cuenta la caída de voltaje
en la salida del excitador debido a la regulación del rectificador la mi s^
ma que es simulada por la inclusión de la constante KC Oa cual es fun-
ción de la reactancia de conmutación}. La curva aproximada que represejn
ta la regulación del rectificador se presenta en la figura N2 5.2-2 |n|.
En el modelo la señal VFE proporcional a la corriente de campo es
derivada de la sumatoria de las señales de voltaje de salida del excita_
dor Vr (multiplicada por los términos IC + Sc> donde Sr representa la sa_
turación) e IpD (multiplicada por el término de desmagnetización IC). La
señal Vrr es usada como entrada al estabilizador del sistema de excita -
ción.
1
FEX
l.O
F IGURA N2 5 -2 -2 C A R A C T E R Í S T I C A S DE REGULACIÓN DEL
RECTIFICADOR

- 75 -
5.2.2 Regulación del rectificador
Todas las fuentes de corriente alterna abastecidas de circuitos
rectificadores pueden ser controladas o no controladas, tienen una impe^
dancia interna predominantemente inductiva.
El efecto de esta impedancia es alterar el proceso de conmuta-
ción de corriente a través de la conducción de los rectificadores y prp_
ducir un decrecimiento del voltaje medio de salida a medida que aumenta
la corriente de carga del rectificador. La reactancia de la fuente des_
de la fase a neutro, la cual, opone la transferencia de corriente a tra^
vés de los rectificadores es definida como reactancia de conmutación.
La reactancia de conmutación tiene el efecto de prevenir la trans^
ferencia instantánea de corriente desde un rectificador a otro. Así, la
conmutación requiere de un tiempo finito el cual es definido por el ángu^
lo de conmutación (y) y también dependiendo de la magnitud de corriente
de carga un retardo inherente definido por ángulo a (debe notarse que es_
te ángulo no es el ángulo de retardo asociado con los rectificadores om
trolados en el principio de procesos de conmutación según se indica en
la figura 5.2.2-1).
Estos ángulos son expresados en grados eléctricos.
La mayoría de los circuitos aplicados en sistemas de excitación
son exafásico de doble estrella, también se recurre a circuitos rectifi-
cadores trifásicos de onda completa tipo puente.

- 76 -
Fl«. N* 6.2.2 . I
O «t »/J icf3-H¿
MODO OE O P E R A C I Ó N
Estos tipos de circuitos deben operar en tres modos diferentes
puesto que la corriente de carga varía desde vacío hasta un valor de cor^
.tocircuito. El modo de operación, depende del producto de la reactancia
de conmutación y la corriente de carga, es decir, de la caída de voltaje.
En el modo de operación I, el ángulo de conmutación y varía ^
de un valor O a 60° y el ángulo de retardo a es cero con incremento de
la corriente de carga. En el modo de operación II el ángulo de conmute^
ción y es fijado en 60° pero el comienzo de la conmutación es retardado
por el inherente ángulo de retardo a el cual varía desde O hasta 30°. En
el modo de operación III, el inherente ángulo de retardo a es fijado en
30° y el ángulo de conmutación y varía desde 60°a 120° |ii|.
Las ecuaciones que caracterizan estos tres modos de-operación de_
finen la regulación del rectificador como una función de la caída de vo]_
taje de conmutación a medida que la corriente de carga varía desde vacío
hasta cortocircuito.
- 77 -
Los valores de EpD, Ip^, VE y K^ son todos en por unidad en base
del campo del generador de alterna. Para propósitos de la simulación,
la curva de la figura 5.2-2 está definida por tres segmentos |13-|.
5.3 REPRESENTACIÓN MATEMÁTICA
Del diagrama de bloques de la figura 5.2-1 y considerando que
las constantes de tiempo TB y T~ son cero debido a que con son constar^
tes bien pequeñas y además que la señal V<- = O ya que en estos sistemas
tampoco se considera el estabilizador del sistema de potencia se tiene:
VR K.K - M Ec. 5.3-1
VER ! + S TA
VR + TA . VR = KA . VER
K V. V,R - Ec. 5.3-2ER T
De la figura H- 4.2.1-1 y con las consideraciones indicadas en
el capítulo IV se obtuvo:
Vi = Vt Ec. 5.3-3
VERR = VREF - Vi Ec. 5.3-4
VER ' VERR + VS - V

- 78 -
Reemplazando la ecuación 5.3-4 en 5.3-5 y considerando V~ = O se
tiene:
VER ' VREF ' Vi - ¥F Ec. 5.3-6
Sustituyendo la ecuación 5.3-6 en la ecuación 5.3-2 se llega a:
V = — V - — v, - A y RVR VREF T Vl VF -
'A 'A TA TA
Sea VR = f
f =
0 • Sl V R > VRMAX y VR
VD , si VRMIN
Continuando con el análisis:
VSR = VR - VFE
"MAX
' Si VR < VRMIN y VR
Ec. 5.3-7
Ec. 5.3-8
Ec. 5.3-9
- 79 -
'SR sTc
'SR Si V£ < O y VE < O -> VE = O Ec. 5.3-10
SE) + K, . I Ec. 5.3-11
Reemplazando la ecuación 5.3-11 en 5.3-9L y el resultado en la e
cuación 5.3-10 se obtiene:
VE - I - 7-'E 'E
Kn
- ! FD Ec. 5.3-12
Derivando la ecuación 5.3-11 y en este resultado se reemplaza la
ecuación 5.3-12 llegándose a:
SE) v .' VE " T • TD TFD
Ec. 5.3-13
De las ecuaciones 5.3-8 y 5.3-13 se obtiene:
KFV F = T 7 '
VR (K + SE). \ K t t>pj • (. j jh l£ TE
KDV - —' E TE
YFF
' V£FD" T.-
Ec. 5.3-14

- 80 -
Para obtener el valor de IFD se toma las ecuaciones 2.5-2 y
2.5-3.
f dVd "
xlfd
ifd = ^ Ec. 5.3-15
Xlfd
En la ecuación 5.3-15 se reemplaza la ecuación 2.4-3 y se reali-
za las respectivas agrupaciones, se obtiene:
V Y y
i 1 md \ md . md' ~ *- ~fH ~ *- x ~ Y 7* * f H ~ Y Y 'H " Y Y 'Mfd xlfd xlfd2 fd xls-xl fd d xlkd.xlfd kd
Ec. 5.3-16
.xad'xlfd ' XI
Derivando la ecuación 5.3-16 se obtiene la derivada de la co-
rriente de campo.
X X . Xmd \ . md ,' mdl 'Vf ~
_"Z ~ l ' f f\ y ' H Y y
lfd xlfd2 fd xls'xlfd d xlkd'xlfd
Ec. 5.3-17
Reemplazando las derivadas de los flujos obtenidos de la ecua -
ción 2.5-4 en la ecuación 5.3-17 se obtiene:
- 81 -
1fd = Q? + Q8 + Q9 Ec. 5.3-18
Siendo:
Q7 = (1 _ ^d .
(lfd xlfd2'
"md
xls'xlfd
' PC10))
md
xlkd'xlfd(PC6) . . PUDl
Del diagrama de bloques de la figura 5.2-1
EFD " VE ' FEX
Para el cálculo de la función de regulación del rectificador
se deben cumplir las siguientes condiciones:
I KC 'N Vr
EX
1 - 0.58.IN
/0.75-IN2
si IN < 0.433
si 0.433 < IN < 0.75
1.732 . (1 - L.) si L, > 0.75N -

- 82 -
Luego el grupo de ecuaciones que determinan los sistemas de excj_
tación tipo AC1 son:
V Kv = o.v - U r-$- .h t IF TE.lp
*- . 7
TF xad
I r . I .-
(Q7 + Qe + Q9)
r u i v .c \r T—V l r r / • •!• r-nfp.Tp E E FD
VR = - r1 • vt -R IA t ' VF ' T + °'VE + ' VREFI- TA E TA Rfch
VD (Kr + Sc)Ec. 5.3-19
5.4 MODELO DEL .SISTEMA DE EXCITACIÓN DE CORRIENTE ALTERNA CON REALIMEN-
TACION DE CORRIENTE DE CAMPO DEL EXCITADOR
El modelo es representado en la figura 5.4-1. Representa a los
sistemas de excitación controlados por campo de alta respuesta inicial
formados por un grupo alternador-rectificador.
El alternador principal del excitador es utilizado con rectifica^
dores no controlados. El modelo es denominado sistemas de excitación ti

- 83 -
po AC2 según la denominación del IEEE | 10
1 + sTeKA
I+STAVA +
•1
FISURA HS 5.4-1 SISTEMA DE EXCITACIÓN TIPO "AC2"
SISTEMA DE EXCITACIÓN ALTERNADOR- RECTIFICADORCON RECTIFICADOR NO CONTROLADO Y REALIMEN.TACION DE CORRIENTE DE CAMPO DEL EXCITADOR
El modelo tipo AC2 es similar al tipo AC1 excepto por la inclu-
sión adicional de dos lazos de realimentación de corriente de campo que
simulan la compensación de la constante de tiempo del excitador y los e-
1 ementes limitadores de la corriente de campo. Este modelo es aplicable
para sistemas de excitación sin escobillas de alta respuesta inicial |io|
La compensación de la constante de tiempo del excitador consiste
esencialmente de una realimentación negativa (V,,) alrededor de la cons -
tante de tiempo del campo del excitador, reduciendo este valor efectivo
y en relación con eso incrementar el ancho de banda de la pequeña señal
del sistema de excitación.

- 84 -
Para obtener la alta respuesta inicial con este sistema un volta_
je forzador ( V ) es aplicado al campo del excitador.
Un sensor de límites de corriente de campo del excitador permite
un alto forzado pero limita la corriente. Por limitación de la corrien^
te de campo del excitador, el voltaje de salida del excitador (Vr) es lj_
mitado por un valor selecto (VLR) el cual es usualmente determinado por
el radio de respuesta del sistema de excitación especificado. Las seña_
les de salida desde el regulador de voltaje (V ) y la constante de tiern
po de compensación (V,,) son comparadas con la señal de salida (V, ) del
limitador en un circuito de control lógico el cual funciona proveyendo
una clara transición desde el control del regulador al control de límj_
tes en los puntos límites de excitación.
La característica de la compuerta de bajo valor (LV) es que la
excitación es controlada por la señal más negativa entre VH y V. .
5.5 REPRESENTACIÓN MATEMÁTICA
De las ecuaciones 4.3-5 y 4.3-6 se obtuvo:
Vi = Vt Ec. 5.5-1
VERR ' VREF
Haciendo las mismas consideraciones que en el sistema tipo AC1
- 85 -
y observando el diagrama de bloques de la figura 5.4-1 se tiene:
VER = VS - VEc. 5.5-3
vs = o
Reemplazando la ecuación 5.5-2 en 5.5-3 se obtiene
V = V - Vi - VVER VREF Vl VF Ec. 5.5-4
VA + KA_ +
VER 1 + s T, 51 VAMIN < VA < VAMAX
VA(1 + sTA)KA'VER
. VER TAEc. 5.5-5
Sustituyendo la ecuación 5.5-4 en 5.5-5:
VA = T - VF) -
K. K._
TTA
y — V-, - — VT a T 'TA ' TA
VA
Ec. 5.5-6
Aa VA - VHEc. 5.5-7
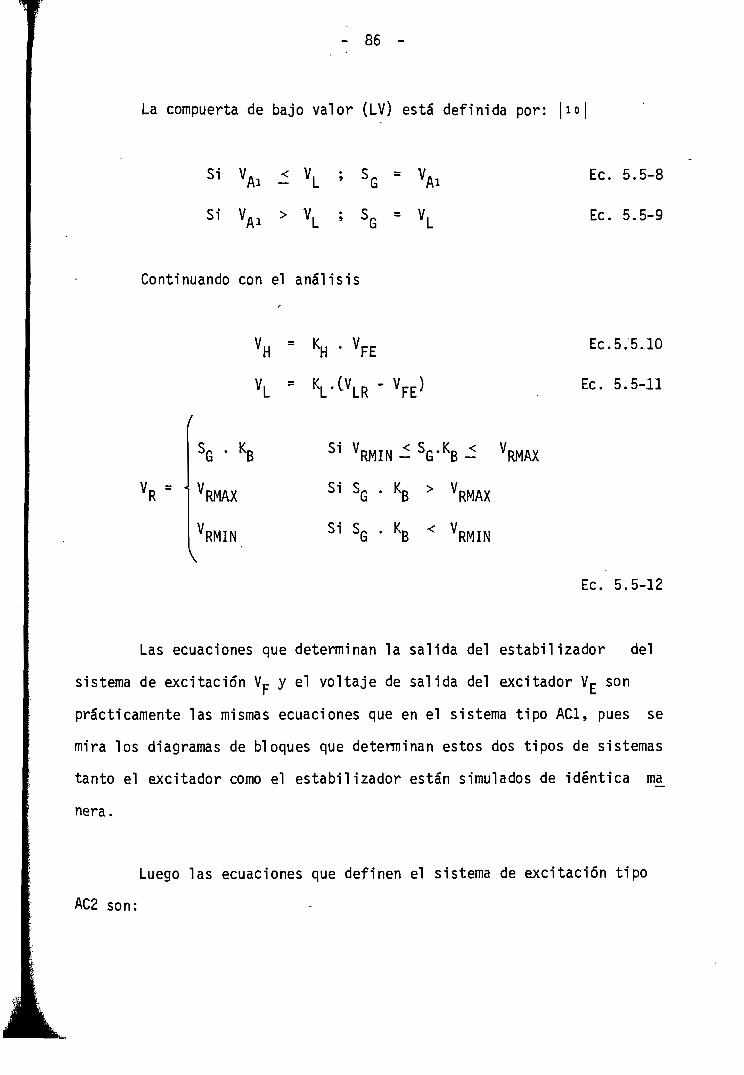
I - 86 -
La compuerta de bajo valor (LV) está definida por: |io|
51 VM ^ VL ; S6 = VA.
S1 VA' > \ SG ' VL
Ec. 5.5-8
Ec. 5.5-9
Continuando con el análisis
VFE
S6 ' KB
VRMAX
VRMIN
Si VRMIN <
Si SG . KB
Si SG . KB
SG'KB- VRMAX
> VRMAX
< VRMIN\0
Ec. 5.5-11
Ec. 5.5-12
Las ecuaciones que determinan la salida del estabilizador del
sistema de excitación Vp y el voltaje de salida del excitador Vr son
prácticamente las mismas ecuaciones que en el sistema tipo AC1, pues se
mira los diagramas de bloques que determinan estos dos tipos de sistemas
tanto el excitador como el estabilizador están simulados de idéntica ma^
ñera.
Luego las ecuaciones que definen el sistema de excitación tipo
AC2 son:

- 87 -
VF • °-vt - TI • VF + °-VA - T T; LFD
.Kn r.
TF ' xadQe
K,
Tp¡ <KE+SE>-VR
r ' Vt '/ ' VF 'IA t IA h • V REFREh
(K,+SF)).V4.+O.VC + O.Vfl V-=- •Vp = O.Vj.'U.¥p ' U . ¥ n
Ec. 5.5-13
Para el voltaje de salida del regulador (VA) debe cumplirse:
Sea VA = f
f =
O . si V A >V A M M y V A > 0
VR ' si VAMIN < VA < VAMAX
0 • S1 VAlVAMIN y V A < 0
Q?» Qe y Qg tienen la"misma definición que en los sistemas de e_x
citación tipo AC1.
1EFD = FEX ' VE
Ec. 5.5-14

- 88 -
Donde F™ es la función que determina la regulación del rectifi-
cador definida en el numeral 5.2.2 de este capítulo.
- 89 -
C A P I T U L O V I
SISTEMAS DE EXCITACIÓN ESTÁTICOS
6.1 DESCRIPCIÓN DE LOS SISTEMAS DE EXCITACIÓN ESTÁTICOS
En este tipo de sistemas la excitación del generador es abasteci_
da a través de transformadores y rectificadores.
Los transformadores se utilizan para transformar el voltaje a un
nivel apropiado (y también la corriente en sistemas compuestos). Los re£
tificadores pueden ser controlados o no controlados y proveen el voltaje
necesario para el campo del generador sincrónico.
En muchos sistemas estáticos, el voltaje máximo del excitador es
muy alto, para tales sistemas, existen circuitos adicionales que limitan
la corriente de campo, no modelados en el presente trabajo, los cuales
protegen el excitador y el generador sincrónico.
La figura N2 6.1-1 ilustra los elementos escenciales de los si\s_
temas de excitación estáticos | js | .
El equipo de la excitación consiste de un par de puentes rectifi^
cadores los cuales reciben el voltaje alterno desde los terminales del
generador sincrónico a través de un transformador de potencial trifásico
T's/P o (PPT 's ) , tres reactores lineales y tres transformadores de C£
rriente saturables T 's /CS o (SCT's) los cuales incluyen los bobinados de
control de corriente continua para modificar la saturación de los nú-

Maq
uina
A
C
Cam
po d
e la
ma'
quln
ade
po
tenc
ia
Inte
rrup
tor
deai
slam
ient
o de
rect
ifica
dor
Con
exió
n de
lne
utro
a
tier
ra
Com
pens
ador
de
volta
jeA
C(
auto
mát
ico)
Man
. A
uto.
Bre
oker
cam
po
RE
GU
LAD
OR
DE
VO
LT
AJ
E
(aut
oma'
tlco)
AC
Con
trol
de
lre
gula
dor
rans
for m
ador
a p
ote
nci
al
i i
(
& .
íl ¡ 11 M
M
& -g°r so o-
g M!
\.M
-
.. .
— (v
>\^*^
/ Bo
bina
d. i
1
\ R
EGU
LAD
OR
1 1
DE
J
| V
OLT
AJE
j
1 (m
anua
l) D
.C
'¡ |
/^
!L c
o de
l
|jm
pens
ador
de
volta
je(m
anua
l) D
.C
h 1"
Inte
rrup
tor |
de o
lsla
mle
nJ
-ta
del r
eetlf
l! i
— o
o-
4— 1íP
ó
1 L.k
;
L ¡
; ¡L
2
[1
k k
H | i i._
__:_
!
Ram
a_
de
r
Inte
rrup
tor
de
alel
an.
del ry
tlflc.
—O
O
—
—O
O
— •—
1
o»; Va Tt
i
rlst
cÍY
RI
Cl
ARF
Re'
slst
or d
ede
scar
ga
DE
O I
Des
defu
ente
lo D.C
cont
rol
del
tran
sfor
mad
orde
cor
rien
te
FIG
UR
A
NS
6
.1-1
EL
EM
EN
TO
S
ES
CE
NC
IAL
ES
D
E
LO
S
SIS
TE
MA
S
DE
E
XC
ITA
CIÓ
N
ES
TÁ
TIC
OS

.- 91 -
cieos.
Estos componentes están coordinados para utilizar el voltaje y
corriente terminal del generador y aproximadamente proveen la excitación
necesaria para mantener el voltaje terminal constante para todos los e¿
tados estables de carga del generador.
Básicamente, los PPT's y los reactores lineales proveen la excj_
tación en vacío para el generador; mientras que, los SCT's proveen la
excitación necesaria para cambios de carga del generador.
Es necesario resaltar la acción de los transformadores de potejí
cial y los transformadores de corriente saturables que proveen la com-
pensación exacta para cambios de carga y para el calentamiento y satura_
ción del campo del generador. Esto es realizado variando la magnitud
del fluido de corriente en el control de campo del transformador de co_
rriente saturable. Esto controla la impedancia de magnetización del
transformador de corriente saturable y, por lo tanto, controla la co-
rriente en el secundario del SCT.
El incremento de la corriente en el bobinado de control del SCT
hace que disminuya la corriente en el secundario del SCT y, así, dismj[
nuir la corriente de campo del generador, y lo contrario, un decremento
de la corriente en el bobinado de control del SCT da como resultado un
incremento de la corriente en el secundario del SCT y, en relación con £
so, aumenta la corriente de campo del generador.
La corriente de campo es controlada por medio del bobinado de

1
- 92 "
control de dos maneras:
1. Por un regulador de voltaje automático de corriente alterna
(AC).
2. Por un regulador de voltaje manual de corriente continua
(DC).
Bajo el control del regulador de voltaje de AC, el bobinado de
control de corriente continua del SCT es automáticamente variado paramar^
tener constante el voltaje terminal del generador.
El regulador de AC consiste de dos etapas de amplificadores mag_
néticos y un circuito de comparación que utiliza un diodo zener como re
ferencia.
Si el voltaje del generador de AC sube sobre el valor normal, la
salida del regulador de AC es incrementada para de esta manera incremen-
tar la corriente del control del SCT y, por lo tanto, decrementar el vol_
taje y corriente de excitación. Si el voltaje del generador de AC cae
bajo lo normal, el regulador decrementa la corriente del control del SCT,
esto hace que se incremente la salida del SCT e incremente la excitación.
En lo que respecta al equipamiento, este es designado a proveer
la excitación mientras se realiza mantenimiento bajo carga por aisla -
miento de uno de los dos puentes rectificadores.
Los diodos rectificadores son también protegidos de los transitp_
rios por medio de un resistor THYRITE y circuitos de supresión de transj_
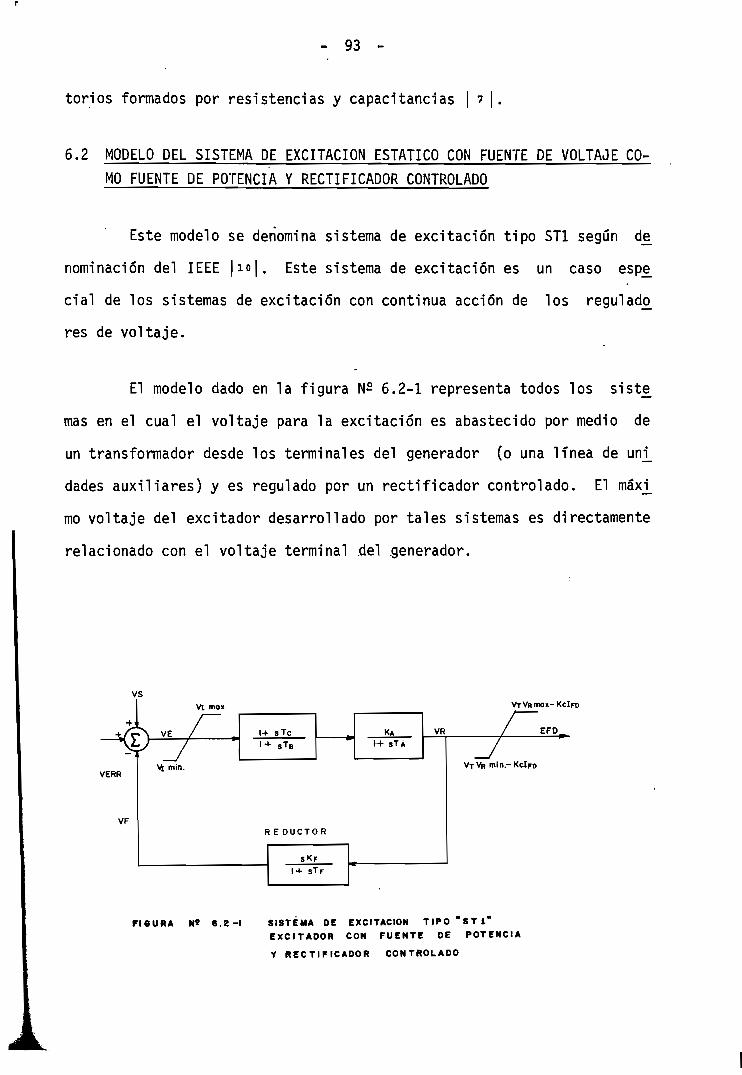
- 93 -
torios formados por resistencias y capacitancias | t |.
6.2 MODELO DEL SISTEMA DE EXCITACIÓN ESTÁTICO CON FUENTE DE VOLTAJE CO-
MO FUENTE DE POTENCIA Y RECTIFICADOR CONTROLADO
Este modelo se denomina sistema de excitación tipo ST1 según d£
nominación del IEEE |i°|. Este sistema de excitación es un caso espe
cial de los sistemas de excitación con continua acción de los regulad^
res de voltaje.
El modelo dado en la figura N£ 6.2-1 representa todos los sist£
mas en el cual el voltaje para la excitación es abastecido por medio de
un transformador desde los terminales del generador (o una línea de uni_
dades auxiliares) y es regulado por un rectificador controlado. El máxj_
mo voltaje del excitador desarrollado por tales sistemas es directamente
relacionado con el voltaje terminal .del generador.
VERR
VF
\ min.
VR
VrVRmax-KclFD
EFO
R E D U C T O R
VjVR mln.-KclFD
F I G U R A N* 6 .2-1 SISTEMA DE EXCITACIÓN T I P O ' S T l "EXCITADOR CON FUENTE DE POTENCIA
Y RECT IF ICADOR CONTROLADO
fl
- 94 -
En este tipo de sistemas, las constantes de tiempo propias son
muy pequeñas y la estabilización del excitador como tal no es requerida.
En cambio debe decidirse la reducción de la ganancia de transitorios pa_
ra tales sistemas.
El modelo dado es suficientemente versátil para representar la
reducción de ganancia de transitorios, implementados en el lazo directo
por las constantes de tiempo TB y L, (en tal caso KF debería ser cero),
o en el lazo de realimentación por una selección apropiada de los pará_
metros KF y TV.
La ganancia del regulador de voltaje y cualquier constante de
tiempo inherente en el sistema de excitación son representadas por K» y
vEn muchos casos el limitador interno subsiguiente a la unión de
sumatorio puede ser no considerado, pero los límites de voltaje de campo
los cuales son función de voltaje terminal del generador (excepto cuando
el excitador es abastecido desde una línea auxiliar) y corriente de cam
po del generador deben modelarse. Pero para la mayoría de transformado
res de sistemas de alimentación K- es bastante pequeña, por lo que el
término K~ . !„ no se tomará en cuenta en la modelación en los sistemas
de excitación tipo ST1.
Para la mayoría de los sistemas de excitación se utiliza un re£
tificador controlado tipo puente, pero el modelo que se presenta es tam
bien aplicable para sistemas con rectificadores semicontrolados, en tal
caso el máximo negativo del voltaje de campo es puesto en cero como se
puede apreciar en la figura 6.2-1.

- 95 -
Algunos ejemplos de los sistemas de excitación tipo ST1 son:
- GENERAL ELECTRIC.- Excitadores Silcomatic
- WESTINGHOUSE CANADÁ.- Excitador con tiristor de estado só"li_
do.
- WESTINGHOUSE.- Sistemas de excitación estáticos tipo PS con
regulador tipo WTA y WHS.
6.3 REPRESENTACIÓN MATEMÁTICA
De las ecuaciones 4.3-5 y 4.3-6 se tiene;
Vi = V, Ec. 6.3-1
VERR = VREF Ec. 6.3-2
Suponiendo que la reducción de ganancia de transitorios se re
presenta por medio de la constante IC y TF, en este caso se toma TB y
TC como cero, y que la señal Vs corresponde a la excitación inicial pa^
ta este tipo de sistemas, se tiene:

- 96 -
Ec. 6.3-3
VE S1 VIMIN - VE - VIMM
VIMAX Si VE > VIMAX
si VE < VIMIN Ec. 6.3-4
1 + sT,
V
VR • TA * KA
KA VRV
Ec. 6.3-5
Reemplazando la ecuación 6.3-4 en 6.3-3 y el resultado en la e-
cuación 6.3-5 se obtiene:
K.
A
K. KA VR KA- - . Vi •- -2- VP - '-ü + — Vs Ec. 6.3-T _ r _ TuTA TA TA A
Continuando con el análisis para la reducción de la ganancia de
transitorios se tiene:
- 97 -
VFTF - V RK F
v = v -F TF VR TF
Ec. 6.3-7
Reemplazando la ecuación 6.3-6 en 6.3-7 se llega a:
K. . K K ,, . K. .
A - F A - F F A - F vs)
Ec. 6.3-8
Tomando la constante K = O
:FD
VR S1 Vt - VRMIN 1 VR 1 Vt ' VRMAX
VfVRMAX S1
VVRMIN Si
VR > vt • VRMAX
VR > Vt • VRMIN
Ec. 6.3-9
Luego las ecuaciones que determinan los sistemas de excitación
tipo ST1 son:
i VIMIN < VE < Vimx entonces V£i = VE
K K

» 98 -
.
"r- vt - r-f" -VFA'TF TA'TF f
K'KA F 1 % A F /" r + _±_ \ + (V + V ^TA-TF T F ' - V F TA.TF (VREF V
Si Vr •? V T M / V V > entonces
KA VRV + — V - —VR Tft VIMAX Tfl
K.. KFv - M r vVF " Tfl.Tc • VIMAX
KF
= V IMAX
'F
rF
Si VE < Vi m N entonces V^ = VIM¡N
KA VRV - _ V . _üVR ~ Tn V I M I N TR
K..K.T -IMIN
VF
"7Ec. 6.3-10
6.4 MODELO DEL SISTEMA DE EXCITACIÓN ESTÁTICO CON FUENTE DE VOLTAJE Y
CORRIENTE COMO FUENTE DE POTENCIA Y RECTIFICADOR CONTROLADO
Algunos sistemas de excitación estáticos utilizan fuentes de co_
rriente y voltaje (valores terminales del generador) como fuente de po-
der. Estos sistemas de excitación con fuente compuesta y rectificadores
se denomina tipo ST2 según la denominación del IEEE, |io| y son modela -
dos como se indica en la figura N2 6.4-1.

- 99 -
VERR
IFD »
I"l"- Kí VE
IN ^
.-
FEX
FISURA NS 6.4-1 SISTEMA DE EXCITACIÓN TIPO "ST 2
EXCITADOR CON FUENTE COMPUESTA
RECTIFICADA
Es necesario que la fuente de poder del excitador sea una combi_
nación de fasores del voltaje terminal Vt y de la corriente terminal 1 .
U carga del rectificador y los efectos de la conmutación son idénticos
a lo explicado en el Capítulo V.
TDMAX representa el límite de voltaje del excitador debido a la
saturación de los componentes magnéticos.
El regulador controla la salida del excitador por medio del cojn
trol de saturación de los componentes de un transformador de potencia.
Tp representa el porcentaje de integración asociado con la inductancia
de los bobinados de control.
Un ejemplo de tales sistemas es el sistema de excitación estátj_
co de la GENERAL ELECTRIC, frecuentemente conocidos como: Sistemas SCT-
PPT o SCPT.
Este tipo de sistema combina el voltaje de salida del regulador
con la señal que representa la autoexitación desde los terminales del ge^

- 100 -
nerador.
K es el coeficiente de'la fuente de excitación proporcional al
voltaje terminal. Similarmente, Kr es el coeficiente de la fuente de co
rriente obtenida desde los terminales de los transformadores de corrien-
te.
6.5 REPRESENTACIÓN MATEMÁTICA
De las ecuaciones 4.3-5 y 4.3-6 se tiene:
= Vt Ec. 6.5-1
V£RR = VR£F - Vl Ec. 6.5-2
si O < E < Es T£ FD FDMAX
EFD . KE + EFD TE = vsl
' VS1 KEF - JJ- _E. F" L
Observando la figura 6.4-1 se tiene:
VR Ec. 6.5-4
Ec. 6.5-5
Los fasores de voltaje y corriente son determinados según refe -
rencia I 2 I.- vt -LOI T - it B
T 101 -
La regulación del rectificador está definida por:
1 - 0,58 Iw si L. á 0.433
EX
1N N
/ 0.75 - IN2 si 0.433 < IN < 0.75
1.732 (1 - IN) si IN > 0.75
donde:
Ec. 6.5-6
Reemplazando la ecuación 6.5-5 en 6.5-4 y este resultado en la
ecuación 6.5-3 se obtiene:
r = __ü + _£ p £ p
FD TE TE ' EX TE FD
Ec. 6.5-7
Continuando con el análisis se tiene:
'R _'ER i + s T 81 VRMIN - VR * VRMAX
A
\ _ £•. \ mVR - TA VER " TA Ec. 6.5-8
V = V + V - VVER S ERR F
Ec. 6.5-9

- 102 -
Suponiendo V$ = O y reemplazando la ecuación 6.5-2 en la ecua^
ción 6.5-9 y este resultado en la ecuación 6.5-8 se obtiene:
K K Ec. 6.5-10
s Kr
•FD 1 + s Tr
KF .\i _ r r
VF ~ TT ' LFD'_£
FFEc. 6.5-11
Reemplazando la ecuación 6.5-7 en la ecuación 6.5-11 se obtiene:
* = ~ ~" • "Kp Np . Kp
~" • * ~ ~F E F
Kp.Vp
F E• *
Ec-. 6.5-12
Luego las ecuaciones que determinan los sistemas de excitación
tipo ST2 son:
VF ' °-Vt -
KA KA V KVD = - V. - Vp - £ + v^VK I A t I A r
EpD - O.Vt + O.VF + - EFD + FEX
Ec. 6.5-13
-. 103 -
Con las siguientes condiciones:
Sea f = VR
f =
VR * VRMAX
0 Si VR á VRMIN
VR S1 VRMIN < VR < VRMAX
Sea g = EFD
9 =
0 Sl EFD = EFDMAX
O si EFD
\FD si
o y g < o
EFD < EFDMAX
• Vt LQ1 + J Kj It U.

-.104 -
C A P I T U L O V I I
SIMULACIÓN DE LOS SISTEMAS DE EXCITACIÓN
7.1 SIMULACIÓN EN EL COMPUTADOR DIGITAL
En el análisis de los sistemas de excitación en el dominio del
tiempo se utiliza el concepto de estado de un sistema. El estado de un
sistema es un conjunto de números tales que el conocimiento de estos nú
menos y de las funciones de entrada, junto con las ecuaciones que des-
criben la dinámica, proporcionan la salida y el estado del sistema \\.
Para un sistema dinámico, el estado de un sistema se describe en térmi_
nos de un conjunto de variables de estado (V(i), V(2), V(s)...V(n)) en
función del tiempo.
Estas variables son las que determinan el comportamiento futuro
de un sistema cuando se conocen el estado presente del mismo y las seña^
les de entrada.
En el presente trabajo el conjunto de ecuaciones diferenciales
(V(8), V(9), Vdo)...V(n)), que describen el comportamiento de los dis^
tintos tipos de sistemas de excitación se asocian al conjunto de ecua_
ciones diferenciales (V(i), V(2), V(s)...V(7)) que representan la máquj_
na sincrónica (grupo de ecuaciones 2.5-4).
La mayoría de problemas en los cuales el comportamiento transítp_
rio de los sistemas de excitación es esencia de estudio requiere el uso
del computador. Es por lo tanto reconocido que la solución de los si¿

- 105 -
temas puede ser grandemente simplificada si los modelos matemáticos piie
den ser estandarizados. Luego es necesario especificar las constantes
para el modelo que se quiere representar.
Como el uso del computador ha incrementado y los programas
nen que ser desarrollados para representar los sistemas de excitación,
en el presente trabajo se ha simulado dos modelos para cada tipo de sis^
tema de excitación.
Las ecuaciones que representan los distintos tipos de sistemas
de excitación y que se utilizan en -el presente trabajo son el grupo de
ecuaciones 4.3-14 y 4.5-1 para los sistemas de excitación de corrien-
te continua, el grupo de ecuaciones 5.3-19 y 5.5-13 para los sistemas(O
de excitación de corriente alterna y las ecuaciones 6.3-9 y 6.5-13 pa_
ra los sistemas de excitación tipo estáticos.
Para integrar los sistemas de excitación con la máquina sincrónj_
ca es necesario realizar un cambio de base del voltaje de campo; pues,
el voltaje base del excitador es diferente al voltaje base de la máqui-
na sincrónica. Es por tanto necesario mantener siempre la "constante
de ganancia" — — r entre la salida Epn del excitador y la entrada Vf axad
la máquina sincrónica [ *, <* |.
El computador digital resuelve las ecuaciones diferenciales en
forma discreta, es decir, el dominio del tiempo está dividido en segmer^
tos discretos de longitud At y las ecuaciones resueltas para cada seg-
mento .
El algoritmo básico para la simulación digital de los sistemas
- 106 -
de excitación asociados a la máquina sincrónica es el siguiente:
a) Una vez determinadas las condiciones iniciales de la máquina sincró^
nica según referencia [2), en las que también se calcula el voltaje
de excitación inicial referido al estator, con este voltaje y por
medio de la relación Xacj/rf<j se calcula el voltaje de excitación i_
nicial del excitador de los sistemas de excitación para luego deter^
minar las condiciones iniciales de los sistemas de excitación |e|.
b) El vector de derivadas formado por las concatenaciones de flujo mac[
nético de la máquina sincrónica y voltajes de los sistemas de excj_
tación es computado al comenzar el "enésimo" paso.
c) En la integración, se obtiene el vector de flujos magnéticos y de
voltajes para el enésimo más un (N + 1) paso.
d) Al (N + 1) paso se calcula las corrientes y torque de la máquina
sincrónica.
e) Los voltajes del sistema de excitación incluyendo la regulación de
los rectificadores para el caso de los sistemas de excitación de aj_
terna y estáticos, y el voltaje terminal del generador sincrónico
se calcula al (N + 1) paso.
f) El proceso se repite desde el literal b).
Para implementar el cambio repentino de la carga, se modifica el
torque electromagnético por medio de una función escalón, haciéndose
presente en cualquier instante de tiempo fijo; como una suma al tq,rque
inicial.

,- 107 -
7.2 MÉTODO DE RESOLUCIÓN DE LAS ECUACIONES DIFERENCIALES
Con frecuencia se siente la necesidad de resolver conjuntos de
ecuaciones diferenciales simultáneas de primer orden en los análisis
del comportamiento de sistemas de ingeniería. Tales ecuaciones ocurren
regularmente en la obtención de las soluciones de ecuaciones diferencia
les de un orden superior, las cuales deben ser transformadas a un con-
junto de ecuaciones diferenciales simultáneas de primer orden como par;
te del proceso de solución. |i7|, |ie|.
Para resolver las ecuaciones diferenciales se utiliza el clásico
proceso de Runge-Kutta de cuarto orden, donde las fórmulas a emplearse
son de la forma:
y1+1 = y,- + ~ (Ki + 2K2 + 2K3 + M Ec. 7.2-16
donde:
i = (h).f(Xn., Y., U.)
K2 = (h).f (X. + , Y. + f ui 2 i 2 i
K3 = (h).f (X, + , Y. + -, u.1 2 n 2 n 2
= (h).f (X. + h, Yi + K3, u1 + q3) Ec. 7.2-2
> 7'2"3
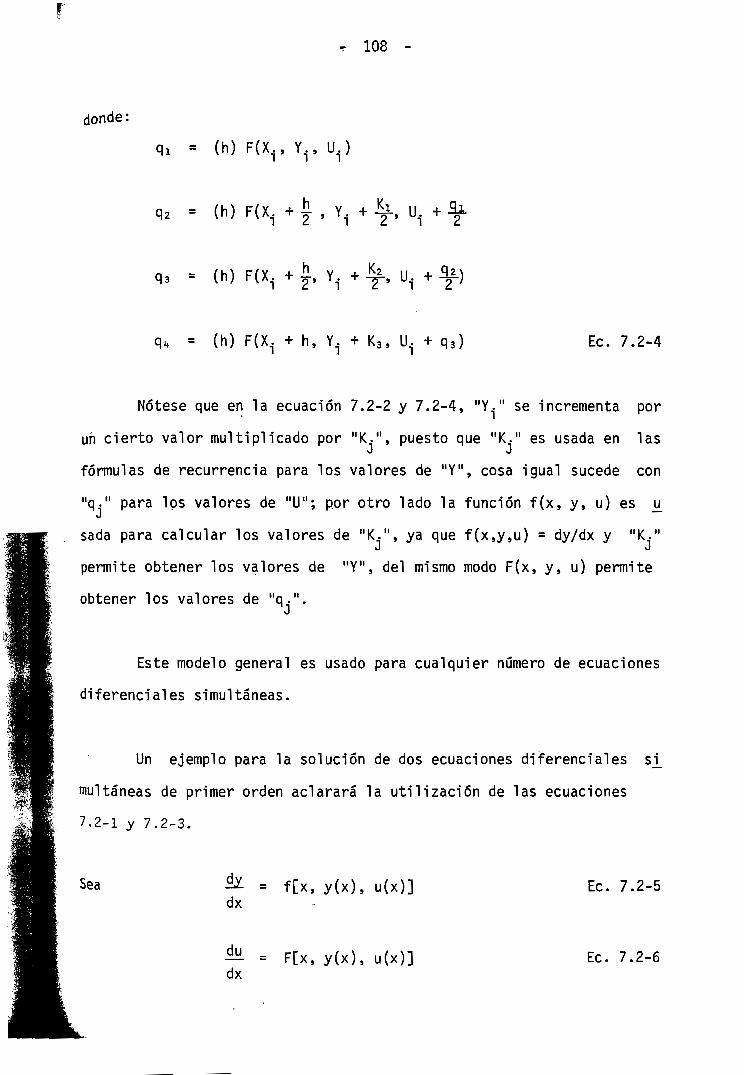
T 108 -
donde:
qi = (h) F(X., Y., U.)
(h) F(X. + , Y. + , U.
q3 = (h) F(X. + , Y. + f-, U.
= (h) F(Xi + h, Y. + K3, U. + q3) Ec. 7.2-4
Nótese que en la ecuación 7.2-2 y 7.2-4, "Y." se incrementa por
un cierto valor multiplicado por "K.", puesto que "K." es usada en lasJ J
fórmulas de recurrencia para los valores de "Y", cosa igual sucede con
"q." para los valores de "U"; por otro lado la función f(x, y, u) es uJ
sada para calcular los valores de "K.", ya que f(x,y,u) = dy/dx y "K."J J
permite obtener los valores de "Y", del mismo modo F(x, y, u) permite
obtener los valores de "q.".J
Este modelo general es usado para cualquier número de ecuaciones
diferenciales simultáneas.
Un ejemplo para la solución de dos ecuaciones diferenciales sj[
multáneas de primer orden aclarará la utilización de las ecuaciones
7.2-1 y 7.2-3.
Seadx
f[x, y(x), u(x)] Ec. 7.2-5
= F[x, y(x), u(x)]dx
Ec. 7.2-6
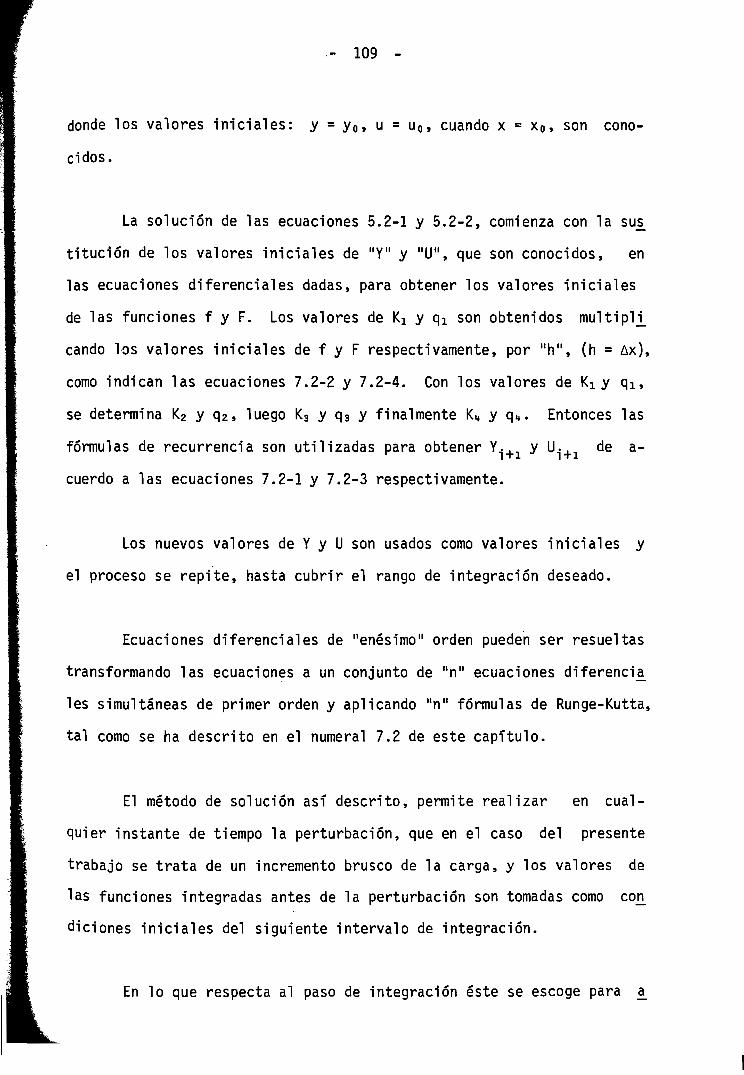
.- 109 -
donde los valores iniciales: y = y0, u = u0, cuando x = x0, son cono-
cidos.
La solución de las ecuaciones 5.2-1 y 5.2-2, comienza con la sus^
titución de los valores iniciales de "Y" y "U", que son conocidos, en
las ecuaciones diferenciales dadas, para obtener los valores iniciales
de las funciones f y F. Los valores de KI y qx son obtenidos multipl^
cando los valores iniciales de f y F respectivamente, por "h", (h = Ax),
como indican las ecuaciones 7.2-2 y 7.2-4. Con los valores de KI y qi,
se determina K2 y qa, luego K3 y q3 y finalmente K.» y q^. Entonces las
fórmulas de recurrencia son utilizadas para obtener Y.+1 y U.+1 de a-
cuerdo a las ecuaciones 7.2-1 y 7.2-3 respectivamente.
Los nuevos valores de Y y U son usados como valores iniciales y
el proceso se repite, hasta cubrir el rango de integración deseado.
Ecuaciones diferenciales de "enésimo" orden pueden ser resueltas
transformando las ecuaciones a un conjunto de "n" ecuaciones diferencia^
les simultáneas de primer orden y aplicando "n" fórmulas de Runge-Kutta,
tal como se ha descrito en el numeral 7.2 de este capítulo.
El método de solución así descrito, permite realizar en cual-
quier instante de tiempo la perturbación, que en el caso del presente
trabajo se trata de un incremento brusco de la carga, y los valores de
las funciones integradas antes de la perturbación son tomadas como cojí
diciones iniciales del siguiente intervalo de integración.
En lo que respecta al paso de integración éste se escoge para a

T 110 -
tender los siguientes requerimientos.
a) Representar adecuadamente el comportamiento normal o transitorio
tanto de la máquina como los sistemas de excitación, para lo cual
debe considerarse un período bastante menor que el correspondiente
a la frecuencia natural del sistema simulado.
b) Evaluar las funciones con una muy buena aproximación.
c) Utilizar el menor tiempo posible de computación.
Para cumplir con los puntos antes indicados se debe escoger un
paso de integración no mayor a 0.004 seg. ni menor a 0.001 seg. El pro_
blema es que si se escoge valores mayores que 0.004 seg no se tiene los
suficientes puntos que visualicen la verdadera respuesta de los siste
mas, y si escoge pasos de integración cercanos a la frecuencia natural
da resultados erróneos durante la ejecución del programa.
En cambio si el paso de integración es muy pequeño el tiempo de
computación se incrementa pues con paso de integración de 0.002 seg.,
cada programa que simula los distintos tipos de sistemas de excitación
incluido el generador sincrónico se demora aproximadamente 10 horas pa^
ra un rango de tiempo de 8 segundos.
7.3 CONDICIONES INICIALES DE LOS SISTEMAS DE EXCITACIÓN
Las condiciones iniciales de los sistemas de excitación son caj
culadas para satisfacer las condiciones de funcionamiento del sistema
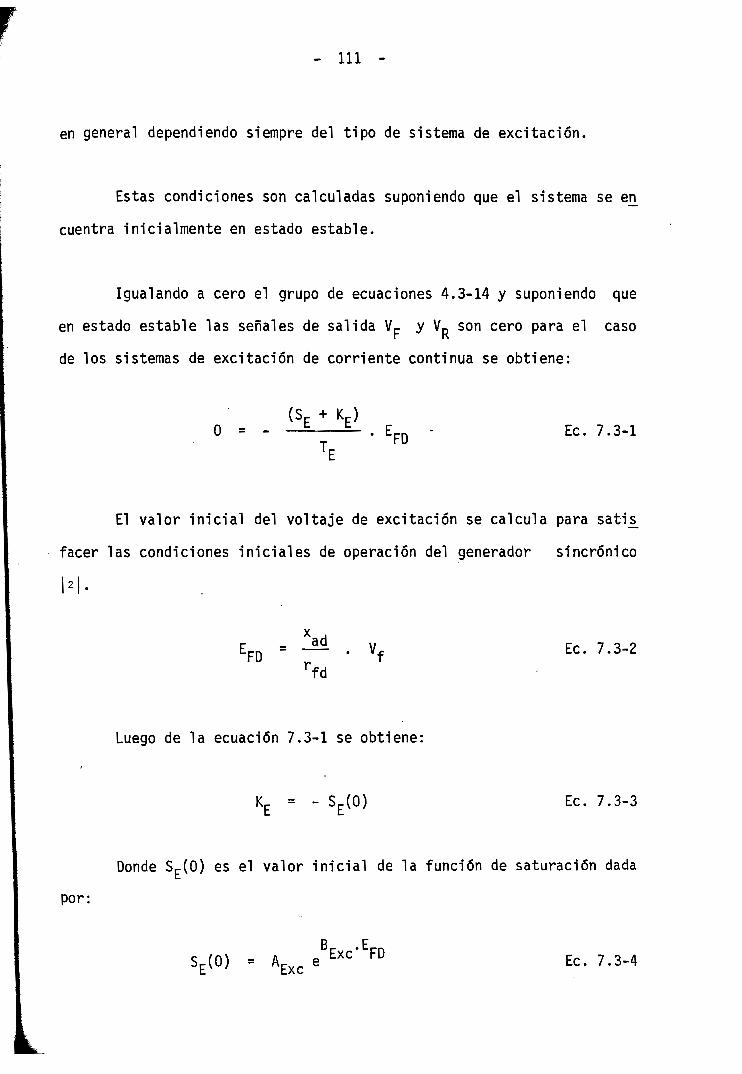
- 111 -
en general dependiendo siempre del tipo de sistema de excitación.
Estas condiciones son calculadas suponiendo que el sistema se eji
cuentra inicialmente en estado estable.
Igualando a cero el grupo de ecuaciones 4.3-14 y suponiendo que
en estado estable las señales de salida Vp y VR son cero para el caso
de los sistemas de excitación de corriente continua se obtiene:
(S + K )O = - — — . EFD - Ec. 7.3-1
El valor inicial del voltaje de excitación se calcula para sati¿
facer las condiciones iniciales de operación del generador sincrónico
N.
x .EFD = — . Vf Ec. 7.3-2
rfd
Luego de la ecuación 7.3-1 se obtiene:
= - SE(0) Ec. 7.3-3
Donde Sr(0) es el valor inicial de la función de saturación dada
por:
SE(0) = A£xc e Exc' FD Ec. 7.3-4

- 112 -
AExc y BExc est^n defini'das por el grupo de ecuaciones 3.6-8.
De la ecuación 4.3-11 se obtiene:
VREF " Vt Ec. 7.3-5
Puesto que la diferencia entre los sistemas de excitación de c£
rriente continua tipo DC 1 y DC 2 es solamente en los límites del regj¿
lador de voltaje, las condiciones iniciales se cumplen para estos dos
tipos de sistemas.
Para el caso de los sistemas de excitación de corriente alterna,
la constante K£ tiene el valor de 1; pues, el excitador en este caso es
de excitación independiente (ver numeral 4.3).
Del grupo de ecuaciones 5.3-19 de los sistemas de excitación ti_
po AC1 y suponiendo que la señal Vp es cero se tiene:
V •AFD Ec. 7.3-6
Los valores de KE y KD son conocidos.
Sr/0\e calcula de igual manera que la ecuación 7.3-4.
El valor inicial de la corriente de campo se calcula de la misma
forma para satisfacer las condiciones iniciales de operación del genera^
dor sincrónico.

.- 113 -
El valor del voltaje del excitador VE sin considerar el factor
de carga F^ del rectificador debido a la reactancia de conmutación es
tá dado por:
-¿2- Ec. 7.3-7""EX
Para determinar la condición inicial de la función FEX que detejr
mina la regulación del rectificador definida en el capítulo V numeral
5.2-2 se sigue el siguiente proceso:
Los valores de Ipn(n) y ^FD(O) son conoc''c'os mientras que el va^
lor desconocido es Vr(0).
El procedimiento sugerido es definir una recta -que pase por el
origen y los puntos E e IpD(0).
El punto de operación inicial es determinado como la interse£
ción de la línea recta y la curva de la figura 5.2-2 que determina F™
Determinado el valor inicial de F™ se puede determinar directa-
mente el valor de V£ según la ecuación 7.3-7.
Para el caso de los sistemas de excitación de corriente alterna
tipo AC2 se obtienen las condiciones iniciales igualando a cero el gru
po de ecuaciones 5.5-13.

- 114 -
SE)
De la ecuación 5.3-11 se tiene:
Ec. 7.3-8
Ec. 7.3-9
Entonces, por las ecuaciones anteriores se llega a:
VR " VFE
De la ecuación 5.3-7 tenemos:
- VVH
De las ecuaciones 5.5-8 y 5.5-9 se tiene:
Ec. 7.3-10
Ec. 7.3-11
51 VAx 1 VL ' SG
Si VAi > VL '• SG = VL
Ec. 7.3-12
Ec. 7.3-13
Si las condiciones iniciales se calculan de tal manera que se
cumpla la ecuación 7.3-12 se obtiene:
Sr = Vn Ec. 7.3-14b Al
Reemplazando la ecuación 7.3-11 en la ecuación 7.3-14 se llega a:
$„ = V. - V,, Ec. 7.3-15

- 115 -
De la ecuación 5.5-12 y suponiendo que la señal de salida de la
compuerta (LV) multiplicada por la ganancia Kg de la segunda etapa del
regulador está entre los límites del mismo se tiene:
VR = SG . KB Ec. 7.3-16
Reemplazando la ecuación 7.3-15 en la ecuación anterior se obti e
ne:
VR ' <VA - V KB
Por la ecuación 7.3-10 se tiene:
VFE = <V V KB Ec' 7'3'17
Observando la figura 5.4-1 se tiene:
Ec. 7.3-18
De la ecuación 7.3-17 se tiene:
* VH
Igualando a cero la ecuación 5.5-6 y suponiendo que el valor de
la salida VF es cero en estado estable, el valor del voltaje de referejí
cia VREp viene dado por:
VREp . ¥t + E. 7.3-20
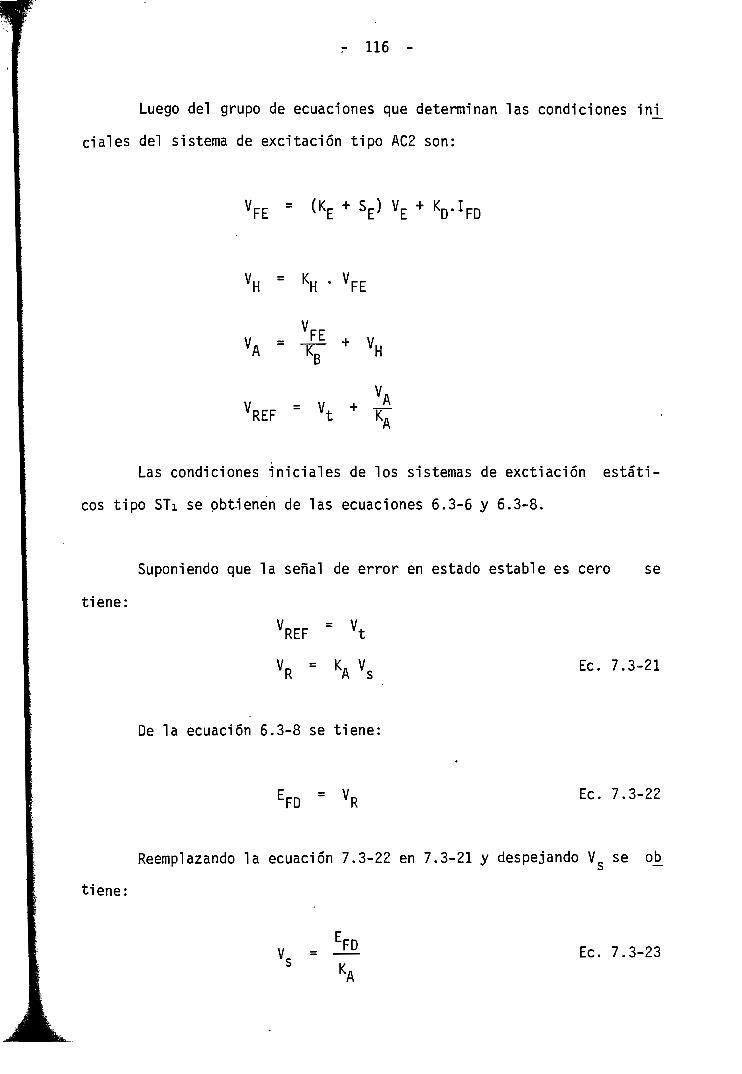
r 116 -
Luego del grupo de ecuaciones que determinan las condiciones inj_
ciales del sistema de excitación tipo AC2 son:
VH - KH ' VFE
VrFE
'A+ u
VHD
VREF • Vt + IA
Las condiciones iniciales de los sistemas de exctiación estátv
eos tipo STi se obtienen de las ecuaciones 6.3-6 y 6.3-8.
Suponiendo que la señal de error en estado estable es cero se
tiene:V = VVREF Vt
VR ' KAVs
De la ecuación 6.3-8 se tiene:
Ec. 7.3-21
EFD " VR Ec. 7.3-22
Reemplazando la ecuación 7.3-22 en 7.3-21 y despejando V se ob^
tiene:
IEDKn
Ec. 7.3-23

- 117 -
Donde la constante K. es un valor conocido y el valor del volta-
je de excitación EFD se calcula según la ecuación 7.3-2 para satisfa -
cer las condiciones iniciales de operación del generador sincrónico |i,
2, 3 .
Del grupo de ecuaciones 6.5-13 se obtiene las condiciones inici^a
les de los sistemas de excitación estáticos tipo ST2.
Suponiendo que Vp y V^ son iguales a cero y reemplazando estos
valores en la ecuación 6.5-12 se obtiene:
KE EFD = VE FEX Ec' 7'3-
Para este tipo de sistemas la constante KE generalmente tiene el
valor de 1 | &\
Los valores de EFD y VE son conocidos pues estos se calculan se
gún las ecuaciones 7.3-2 y 6.3-5 respectivamente para satisfacer las
condiciones iniciales de operación del generador sincrónico.
De la ecuación 6.3-5 se tiene:
VE = | Kp.Vt + j Kj . Tt | Ec. 7.3-25
donde: K = coeficiente de ganancia del circuito de potencial.
Kj = coeficiente de ganancia del circuito de corriente.
Estas constantes según referencia |s| vienen dados por:
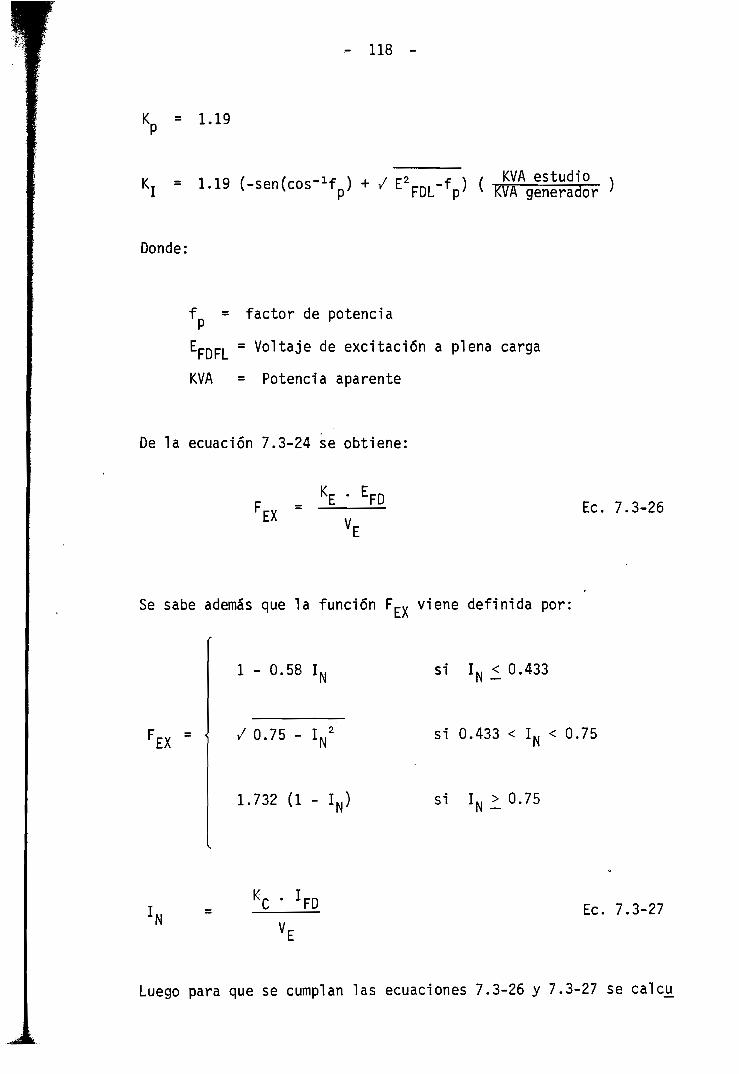
- 118 -
= 1.19
19 f-senfcos-if } + / E2 -f 'i ( KVA estudio.iy i sendos tp; + / t. FD1_-tp; I KVA generador
Donde:
f = factor de potencia
^FDFL = V°^t-aJ'e de excitación a plena carga
KVA = Potencia aparente
De la ecuación 7.3-24 se obtiene:
KE ' EFDEX Ec. 7.3-26
Se sabe además que la función FEX viene definida por:
EX
1 - 0.58 IN
0.75 -
1.732 (1 - IJ
si IN <_ 0.433
si 0.433 < IN < 0.75
si IN >_ 0.75
KC ' Ec. 7.3-27
Luego para que se cumplan las ecuaciones 7.3-26 y 7.3-27 se cal cu

-• 119 -
la el valor K (factor de carga del rectificador de la siguiente mane_
ra:
K
vE(i-0.58 . I
FD
FD
0.75 Frv2EX
VE(1 - F£X)
1.732 . I
si F™ j> 0.75
si 0.443 < FEX < 0.75
si FEX <_ 0.443FD
7.4 PROGRAMA DIGITAL
En base a la teoría expuesta en los capítulos anteriores se e U
boro el programa digital que permite resolver el problema en cuestión.
El diagrama de bloques general del funcionamiento del programa
es como se presenta a continuación.
Detallando en forma más amplia el diagrama de bloques expuesto,
el programa digital consta de:
- PROGRAMA "TESIS"
- PROGRAMA "DATAGEN"
- PROGRAMA "SISTDC"
- PROGRAMA "SISTAC"
- PROGRAMA "SISTST"
- PROGRAMA "SINEXI"
- PROGRAMA "GRÁFICOS"
- Subrutina de condiciones iniciales

- 120 -
DIAGRAMA DE BLOQUES GENERAL
"TESIS"
En este bloque se ingresancondiciones para le funcip_namiento del computador yse selecciona el ingresode datos o resultados gr£fieos.
"DATAGEN"En este bloque se leen y es_criben los parámetros delgenerador ya sea desde el o_perador o desde archivo, seingresan condiciones de fun_cionamiento y ademas se s_elecciona el tipo de sistemade excitación.
"SISTDC"
Bloque en el cual seleen y escriben losparámetros del sistema de excitación yasea tipo DC1 o tipoDC2, se escriben cotídiciones .iniciales defuncionamiento y se jijecuta el programa p¿ra este tipo se siste_mas.
"SISTAC"
En este bloque se leeny escriben los parametros del sistema deexcitación tipo ACl oAC2, se escriben cotídiciones iniciales defuncionamiento y se e_j ecuta el programa p¿ra estos sistemas deexictación.
J'SISTST"
En este bloque se rea_liza un procedimien-to similar a los o-tros sistemas de ejecitación.
"GRÁFICOS"
En este bloque se iinprimen los resulta -dos gráficos de a-cuerdo al archivo de_terminado para losdistintos tipos desistemas de excita -ción.
- 121 -
- Subrutina de saturación del generador
- Subrutina de método Runge-Kutta
PROGRAMA "TESIS"
Básicamente en este programa se selecciona la unidad de discos
del computador donde se ha puesto el diskette para de esta manera dar
las instrucciones necesarias para el funcionamiento del programa.
Seguidamente en este programa se da a seleccionar tres teclas
las mismas que son definidas de la siguiente forma:
TECLA # 1 Reiniciar el programa
TECLA # 2 Ingreso de datos
TECLA # 3 Resultados gráficos
Para el caso que se selecciones la tecla # 2 se llama al progra^
ma "DATAGEN". Si se selecciona la tecla # 3, primeramente se selecci£
na el tipo de sistema de excitación y luego se llama al programa "GRAR
COS".
PROGRAMA "DATAGEN"
En este programa se realiza lo siguiente:
Se selecciona el ingreso de datos del generador sincrónico desde
archivo o desde el operador. "

~ 122 -
Si se selecciona desde el operador se debe ingresar todos los pa_
rámetros que simulan la máquina sincrónica para luego ser grabados en
algún archivo. Una vez grabados los datos se llama a la subrutina de
llamado e impresión de datos. .
Si se selecciona el ingreso de datos desde archivo se va a la
subrutina de llamado e impresión de datos.
La subrutina de llamado e impresión de datos consta de:
- Ingreso de condiciones para el funcionamiento del generador sincrónj^
co sea con el modelo no saturado o saturado.
- Ingreso de perturbaciones que pueden ser variación brusca de la car.
ga o estado estable.
Si se selecciona variación brusca de la carga hay que ingresar
el tiempo de inicio de la perturbación y el ángulo eléctrico inicial de
la pertubación.
- Impresión de los parámetros de la máquina sincrónica.
Por último se da a escoger cuatro teclas las mismas que están de^
finidas de la siguiente manera y hacen la llamada al programa respecti-
vo.
TECLA # 4 Sistema de excitación de corriente continua
TECLA # 5 Sistema de excitación de corriente alterna
- 123 -
TECLA # 6 Sistema de excitación estático
TECLA #7 Sin sistemas de excitación
PROGRAMA "SISTDC"
En este programa se simulan los sistemas de excitación -de co-
rriente continua incluida la máquina sincrónica, la misma que está in-
terconectada a un sistema línea de trahsmisión-barra infinita.
El proceso del programa es el siguiente:
- Se ingresan parámetros de los sistemas de excitación comunes tanto
para los sistemas de excitación tipo DC1 y tipo DC2.
- Se selecciona el funcionamiento del programa con sistema de excita_
ción tipo DC1 o tipo DC2.
- Llama a subrutina de condiciones iniciales, se imprimen valores inj_
ciales y se almacenan estos valores.
- Llama a subrutina para evaluar las derivadas por el método de Runge-
Kutta, utiliza además la subrutina de saturación.
- Calcula corrientes, torque y el voltaje terminal de la máquina.
Si se seleccionó estado estable y el tiempo es menor al tiempo máxi_
mo establecido se almacenan los valores y se continúa con el proceso.

- 124 -
- Si se seleccionó variación brusca de la carga se calculan nuevamente
los parámetros en los que influye este cambio, se almacenadlos valo^
res y se continúa con el proceso hasta llegar al tiempo máximo.
- Por último se llama al programa de graficación "GRÁFICOS".
PROGRAMA "SISTAC"
Este programa simula los sistemas de excitación de corriente al-
terna incluida la máquina sincrónica, la misma que está interconectada
a un sistema línea de transmisión-barra infinita.
El proceso del programa es similar al programa "SISTDC" con la
diferencia de que cuando se calcula corrientes, torque y el voltaje te£
mina! .de la máquina también se calcula el voltaje del excitador inclu-
yendo el efecto de la regulación del rectificador.
PROGRAMA "SISTST"
En este programa se simulan los sistemas de excitación estáticos
incluida la máquina sincrónica, la misma que está interconectada a un
sistema linea de transmisión barra infinita.
El proceso de ejecución del programa es similar a los programas
"SISTDC" y "SISTAC".
- 125 -
PROGRAMA "SINEXI"
En este programa se simula la máquina sincrónica acoplada a un
sistema línea de transmisión barra infinita.
A continuación se dan los diagramas de flujo correspondientes a
estos programas.

- 126 -
DIAGRAMA DE FLUJO DEL PROGRAMA "SISTDC"
[INICIOf
Ingresar parámetros de sis_tema de excitación
So = 1
Imprimir parame_tros del sistema
tipo DC1
G>
So
16 = O
Subrutina decondiciones i-niciales±
Imprimir condi-ciones iniciales
Almacenar valoresen G(i) i = 1-11
SubrutinaRunge Kutta
Ko = Ro
Imprimir parametros del siste-ma tipo DC2
Si <D

- 127 -
Evaluar derivadas de la máquinasincr6nica y del sistema de eiccitación de corriente continua
F(N) N = 1 - 10
IEvaluar límites del regulador de
voltaje
F(9)
Subrutina desaturación
Evaluar concatenaciones deflujo mutuo en el eje directo
FO
O Evaluar la saturación delexcitador
S6
L
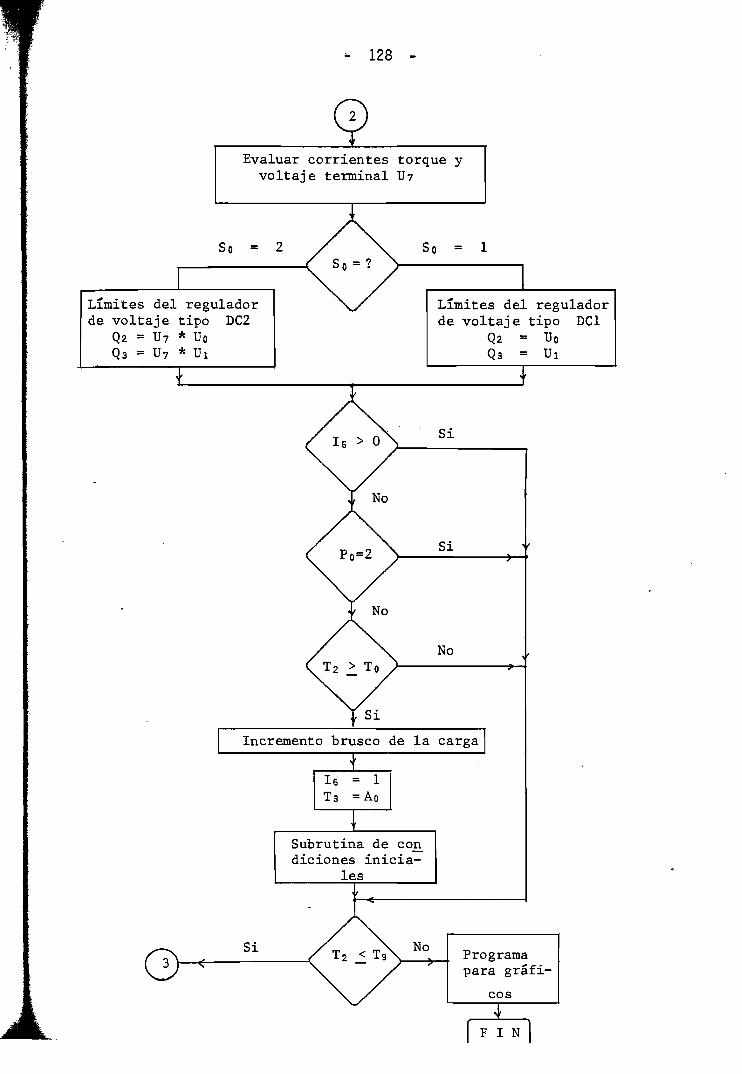
- 128 -
Evaluar corrientes torque yvoltaje terminal U?
So = 2
Límites del reguladorde voltaje tipo DC2
Q2 = U7 * U0Q3 = U7 * Ui
i
1G>
S0 = 1
Límites del reguladorde voltaje tipo DC1
Qz = UoQ3 = Ui
Si
Si
No
Si
Incremento brusco de la carga
Subrutina de con.diciones inicia-
les
Si Programapara gráfi-
A.F I N

- 129 -
DIAGRAMA DE FLUJO DEL PROGRAMA "SISTAC"
Ingresar los paránietros del sistema de
excitación
So
Imprimir paráme-tros del sistemade excitación ti
po ÁCI —
\ /Ingresar paráme-\ (tros del sistemaN-' de excitación ti
1 po AC2 ~
*Imprimir paráme-tros del sistemade excitación ti
po AC2
1
d>
16
Subrutina de Condiciones Iniciales
ImprimirCondicionesIniciales
Almacenar ".valores en
G(i) i = 1 - 12

-- 130 -
Evaluar derivadas de lamáquina sincrónica
F(i) i = 1 - 7
So
Evaluar derivadas delsistema de excitación
tipo AGÍF(j) j = 8 - 10
Evaluar límitesdel regulador
57 = F(9)
58 = F(10)
So
Evaluar derivadas delsistema de excitación
tipo AC2F(j) j = 8 - 10
Subrutina de
Saturación
V
Evaluar límitesdel regulador
57 = F(9)
58 = F(10)

r- 131 -
Evaluar concatenacio-nes de flujo mutuo FO
IEvaluar la saturacióndel excitador Se
Evaluarcorrientes y torque
Evaluar coeficientesde la derivada de cp_rriente de campo Q?,
Qs. Q9
So
So
Evaluar el voltaje proporcionala la corriente de campo Oo, Cons_tante de tiempo de compensaciónO5,Limitador de corriente Oí*.
06 • V(9) - Os
Si No
Evaluar límites delregulador de voltaje
2da. etapa

- 132 -
©
Cálculo del voltaje de excita-ción incluyendo el efecto de la
regulación del rectificadorG?
iCálculo del voltajeterminal del
generador
Si
Incremento bruscode la carga
Subrutina deCondiciones Iniciales
Llamada al pro-grama para grá-
ficos
"

- 133 -
DIAGRAMA DE FLUJO DEL PROGRAMA "SISTST"
Ingresar parámetrosdel sistema de excita-
ción
So So
Imprimirtros del
tipo í
paráme-sistema3T1
^ ^
Ingresarque defintema de e
tipo•
Imprimirtros delde excita
SI
parámetrosen el sisxcitaciórTST2
f
paráme-sistemación tipo'2
16
Subrutina deciones Iniciales
ImprimirCondiciones Iniciales
Almacenar valores enG(i) i = 1 - 11
SubrutinaRunge Kutta
o.\
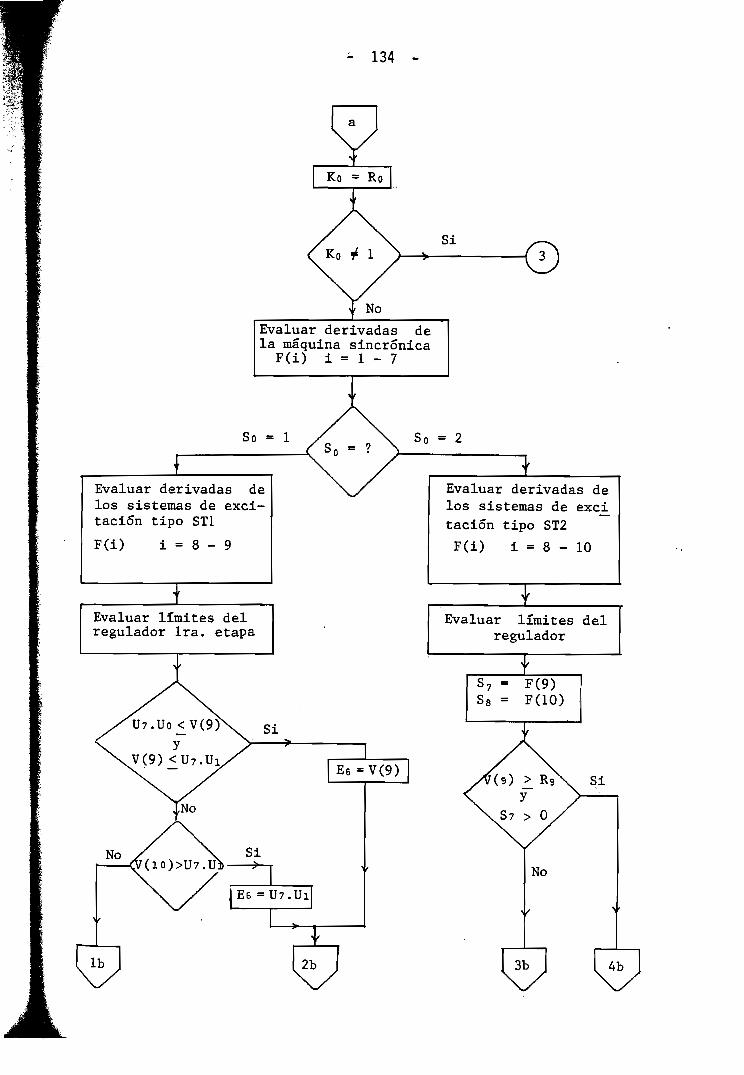
- 134 -
Ko = Ro
Si
No
Evaluar derivadas dela máquina sincrónicaF(i) i = 1 - 7
So
Evaluar derivadas delos sistemas de exci-tación tipo ST1
F(i) i = 8 - 9
S0 = 2
1Evaluar derivadas delos sistemas de exci_tación tipo ST2
F(i) i = 8 - 10
Evaluar límites delregulador Ira. etapa
Evaluar límites delregulador
57 = F(9)58 = F(10)
Si
No
3b 4b

- 135 -
No
Si
Ee = U? . Uo
2b
Subrutinade
Saturación
Evaluar Fo
Evaluar corrientesy torque
So = 2
Evaluar voltaje terminal y voltaje de excT
tador
So = 1
Evaluar el
voltaje terminal
Evaluar el factorde carga G?
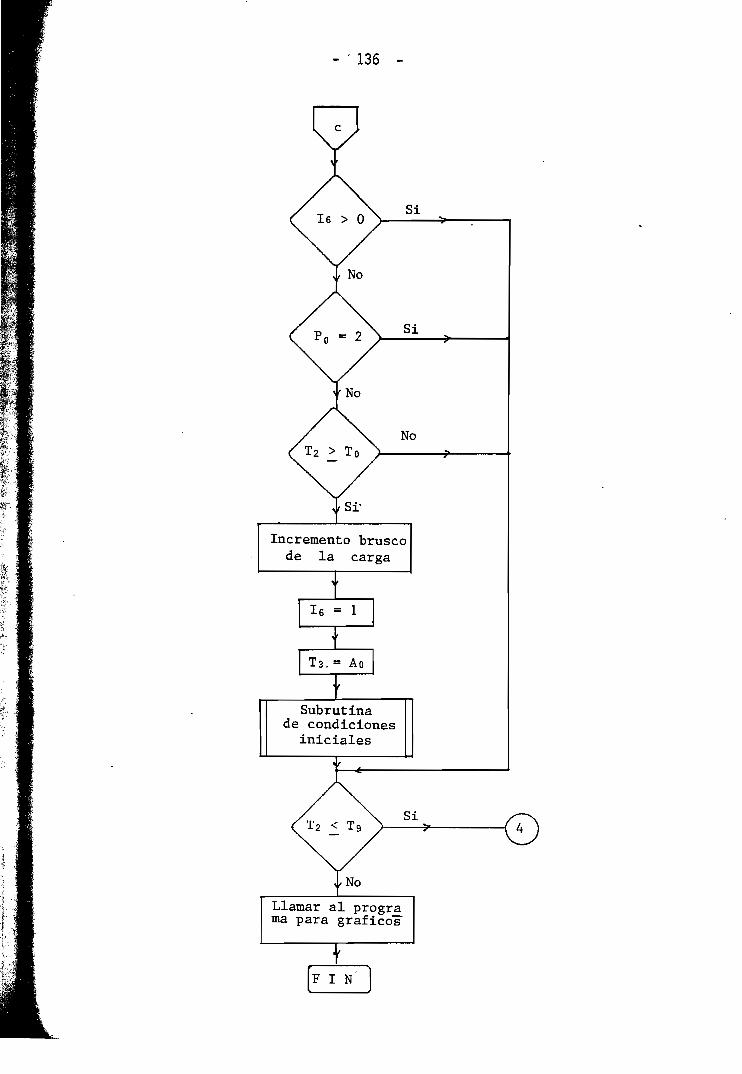
- ' 136 -
le > o Si
No
No
T2 > To
Si
No
Si-
Incremento bruscode la carga
Subrutinade condicionesiniciales
Si
No
Llamar al programa para graficoü"
<D

L
-' 137 -
SUBRUTINA DE CONDICIONES INICIALES
Evalúa los coeficientes del sistema de ecuaciones diferenciales,
del voltaje terminal de la máquina.
Calcula condiciones iniciales para la integración. Con el obje^
to de concordar con la teoría desarrollada, cuando se trabaja en la pa£
te no lineal de la curva de saturación, las concatenaciones de flujo
fd' *fd' f deben ser saturadas, por lo que se llama a la subrutina de
saturación.
Calcula coeficientes de la función de saturación del sistema de
excitación y con estos la función que representa la saturación del excj[
tador para el caso de los sistemas de excitación de corriente continua
y sistemas de excitación de corriente alterna.
Calcula coeficientes de los sistemas de excitación.
Cuando se trata de sistemas de excitación de corriente alterna y
estáticos en la subrutina de condiciones iniciales existe una subrutina
la misma que calcula el factor de carga del rectificador debido a la
regulación del rectificador.
SUBRUTINA DE SATURACIÓN DEL GENERADOR
Permite.obtener el valor correspondiente de DXI en función de
ad*' por medl° de una "linealización" de la curva de saturación de la
máquina. Esta linealización se la hace por medio de tres segmentos de

- 138 -
recta según se indica en la figura 2.5-1 del capitulo II.
DXJ es devuelto al programa principal o a la subrutina de condi-
ciones iniciales dependiendo de donde proviene la "llamada", para ajus^
tar los valores correspondientes sin saturación hasta el punto de fun-
cionamiento sobre la curva de saturación.
SUBRUTINA DEL MÉTODO RUNGE KUTTA
Emplea el método Runge-Kutta de cuarto orden para resolver ecua-
ciones diferenciales simultáneas de primer orden f(j) = dY(j)/dx, (j =
1, 2, ... n), a través de un paso de longitud H en la variable indepe£
diente X, sujeta a condiciones iniciales y(j), (j = 1, 2, ... n). Cada
f(j), la derivada y(j), debe ser calculada cuatro veces por paso de iji
tegración, por el programa principal. La función debe ser llamada cin-
co veces por paso, de manera que el valor de (x) y los de la solución
y(l)> y(2) ... y(n) pueden ser actualizados utilizando el algoritmo Rují
ge-Kutta jz|.
PROGRAMA GRÁFICOS
En este programa se da a escoger que gráfico se desea y según el
gráfico seleccionado indica los valores máximos y mínimos tanto en el
eje x como en el eje y para de esta manera ingresar los parámetros que
van a delimitar el margen en el que va a estar el gráfico.
En el gráfico también es posible poner títulos, los mismos que
se pueden poner en el lado inferior o en el lado lateral izquierdo.

' - 139 -
C A P I T U L O V I I I
APLICACIONES
8.1 ESTADO ESTABLE
Las ecuaciones diferenciales que describen el modelo de la máquj_
na sincrónica y los sistemas de excitación simulan el análisis de su
comportamiento como una función del tiempo. Cuando la máquina opera en
condición de estado estable, el voltaje de excitación se mantiene cons^
tante debido a que la señal de error que ingresa al regulador de volta^
je también se mantiene constante y por lo tanto la salida del estabilj^
zador del sistema de excitación también es constante.
En el estado estable las condiciones iniciales calculadas de los
datos impuestos tanto para la máquina sincrónica como para los sistemas
de excitación dados en el Apéndice C, deben mantenerse constantes o va^
riar sinusoidalmente con el tiempo durante el proceso de integración de
las ecuaciones diferenciales; esto se comprueba mediante la realización
de una prueba de funcionamiento para de esta manera concluir en la bor\_
dad del programa digital.
Los gráficos que se muestran a continuación representan los re-
sultados de la operación en estado estable y demuestran lo expuesto an^
teriormente.

- 140 -
Fecha :27-MAR-86 18:25550ARCHIVO:6TESIS/PARAGEN
PARÁMETROS DE LA MAQUINA SINCRÓNICA
Valores en P«U*ACCIÓN GENERADORA
MODELO SATURADO
Resistencia de Armadura
Resistencia del devanado amortiguador eJe Q
Resistencia del devanado amortiguador eJe D
Resistencia del devanado de campo
Resist.de la linea de transmisión
Reactancia de dispersión del dev.de armadura
Reactancia de magnetización del eje Q
Reactancia de magnetización del eje D
React«de disp» del dev« amortiguador eJe Q
Resct.de disp. del dev. amortiguador eJe D
React.de disp« del devanado de campo
Reactancia de la linea de transmisión
Reactancia del transformador
Constante de inercia en segundos
Velocidad inicial del rotor
Velocidad angular eléctrica en rad./seg.
Voltaje terminal fase-neutro
Ángulo del factor de potencia
Potencia aparente monofásica
R4=0.00991
Rl=0.0311
R2=0.03239
R3=7.158E-4
R5=0.0085
Y4=0,077
Xl=0.593
X2=l,013
X3=0.2973
X4=0«3822
X5=0,2554
Y3=0.01684
T7=0,095
H=4.892
Vl = l
V2=377
V3=l
A5=-0.31756

-. 141 -
MAQUINA SINCRÓNICA SIN SISTEMAS DE EXITACION
TIEMPO MÍNIMO T8=0
TIEMPO MÁXIMO T9=0.1
PASO DE INTEGRACIÓN H0=0.002
ESTADO ESTABLE
CONDICIONES INICIALES
CORRIENTE DEL EJE EN CUADRATURA I2=-0,573657512646
CORRIENTE DEL EJE DIRECTO I3=-0.557599370682
CORRIENTE DE FASE I5=-0*75999994397
CORRIENTE DE EXCITACIÓN 14=1*73754768204
TORQUE ELECTROMAGNÉTICO Tl=-0.771782098816
ÁNGULO DELTA D=0*453643180062
VOLTAJE DE EXCITACIÓN V5=0,0012437366308
VOLTAJE TERMINAL DE LA MAQUINA U7=l.04561349049
ARCHIVO DE DATOS:@TESIS/ESTABLE
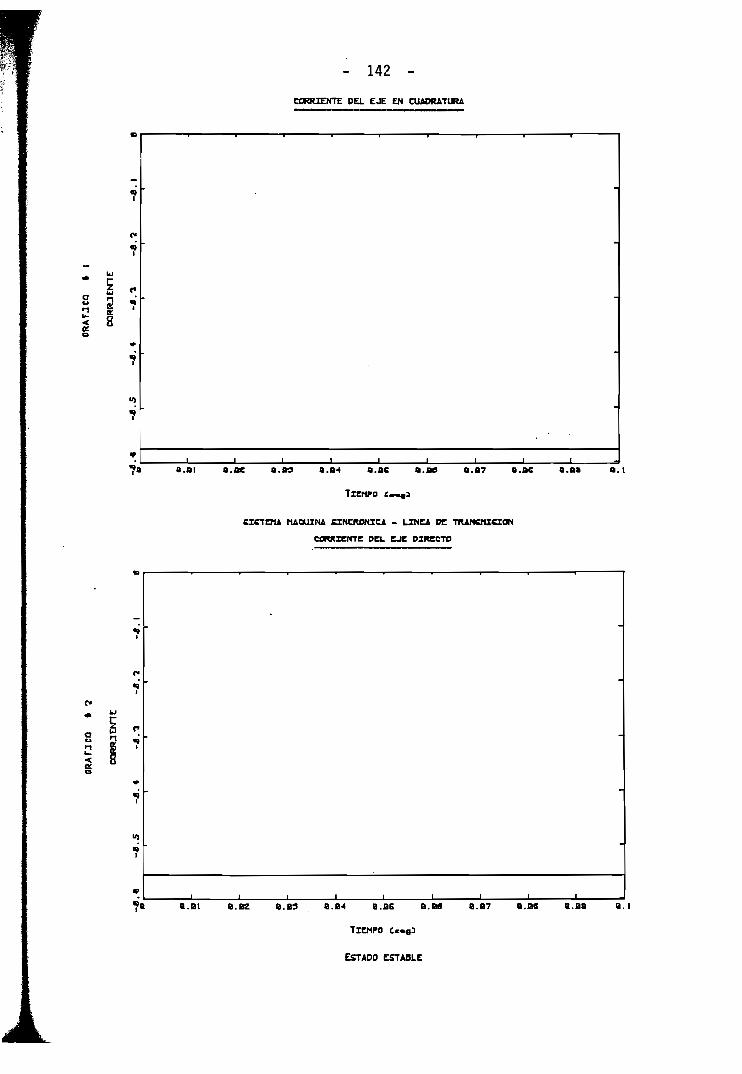
- 142 -
CORRIENTE DEL EJE EN CUADRATURA
aun
snu.<
6 *•3 •»'
a.ai a.ac tt.oa Q.B-* Q.BE a.i
TIEMPO c~.ez
a.a? e.ac a.aa a.i
CICTCnA riAQUINA SINCRÓNICA - LINCA PC TKANOIXCIOM
C0RRXENTC DEL EJE DIRECTO
e.Bi a.B2 e.23 e.a-t B.BE a
TIEMPO c««83
ESTADO ESTABLE
Q.B7 a.as a.ua a.i

8 2n s< 8
- 143 -
CORRIENTE DE FASE
a.ai B.BZ a.as a. 0-4 a.ac a.ae a.a? a.ae a.aa o.i
Tienro <:_,.}
CXCTEMA MAQUINA SINCRÓNICA - LINCA PC TIUNCHICION
COKRICNTC PC CXCXT.ACZON
.5 o
Q.BI B. B.B-4 B.BC B.B6 B.B7 B.B8 O.BS 8.1
TIEMPO
ESTADO ESTABLE
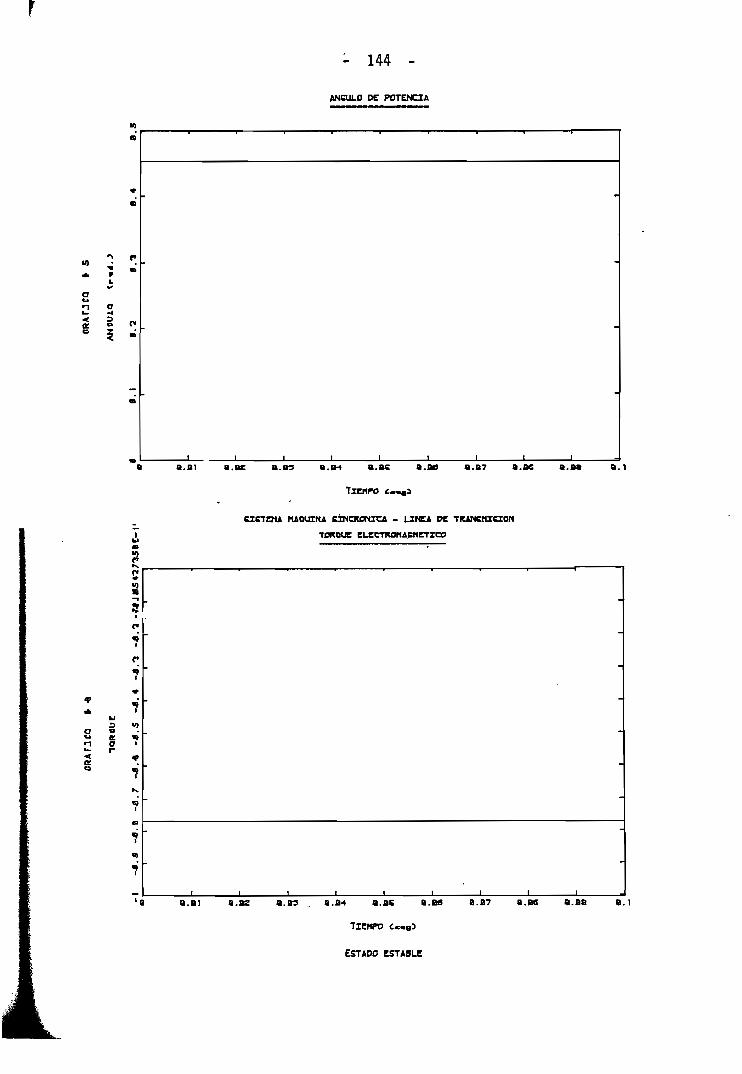
- 144 -
ÁNGULO DE POTENCIA
2 Si o-
I -i
a.Bi a.oc a.i» B.BM a.ac a.00 a.a? a.oc a.aa a.i
TZCHPO Cmmf3
CICTOIA MAQUINA SXNCIWMICA - LINCA pe TRANCMXCIONTCKQUC CLCCTKDMACNCTICD
COr
Q.BI B.BZ o.B3 ^ a.a-4 a.oe a.06
TIEMPO c««g2
ESTADO ESTABLE
B.D7 B.B8 e.aa a. i

- 145 -
DESVIACIÓN DE LA VELOCIDAD ROTÓRICA
< > s7
?a a.ai a.az a.as a.a-t a.ac a.ae a.a? O.BC a.aa a. i
TlEMTO Cmmm*
CICTCItA HAOUINA CINCKDNIC4 - LINEA DC TRANCMICION
VOLTAJE
8 B.BI B.BZ B.B3 O.B-t B.BC Q.B6 B.B7 a.BC B.BB Q. 1
TIEMPO c««ai
ESTADO ESTABLE

- 146 -
SISTEMAS. DE EXCITACIÓN IlEL CORRIENTE ..CQJÜTINUé.....
PARÁMETROS DEL. SISTEMA DE EXCITACIÓN TIPO DC1
VOLTAJE DE EXCITACIÓN A 0,75 DEL MÁXIMO E4=3,9
VOLTAJE "DE' EXCITACIÓN" MÁXIMO" ~~ 'E5-5724
C Q N S "í A N T E D E TIE M P O _ D E i... E X CIT A D O R J1 ~ 1 , 9 3
CONSTANTE DE TIEMPO DEL ESTABILIZADOR J2=l
CONSTANTE~bÉ fÍEMPÓ'DEL'REGÜLÁbb'R'"" "" " " J4=0.""2 ""
GANANCIA DEL. EST ABILIZADOR K3 = 0 * 12
VOLTAJE MÍNIMO DEL REGULADOR - : '/": .' • UO---2 4 60;
VOLTAJE MAX IHO DEL REGULADOR /i" . • Ul-~2*é-'07-
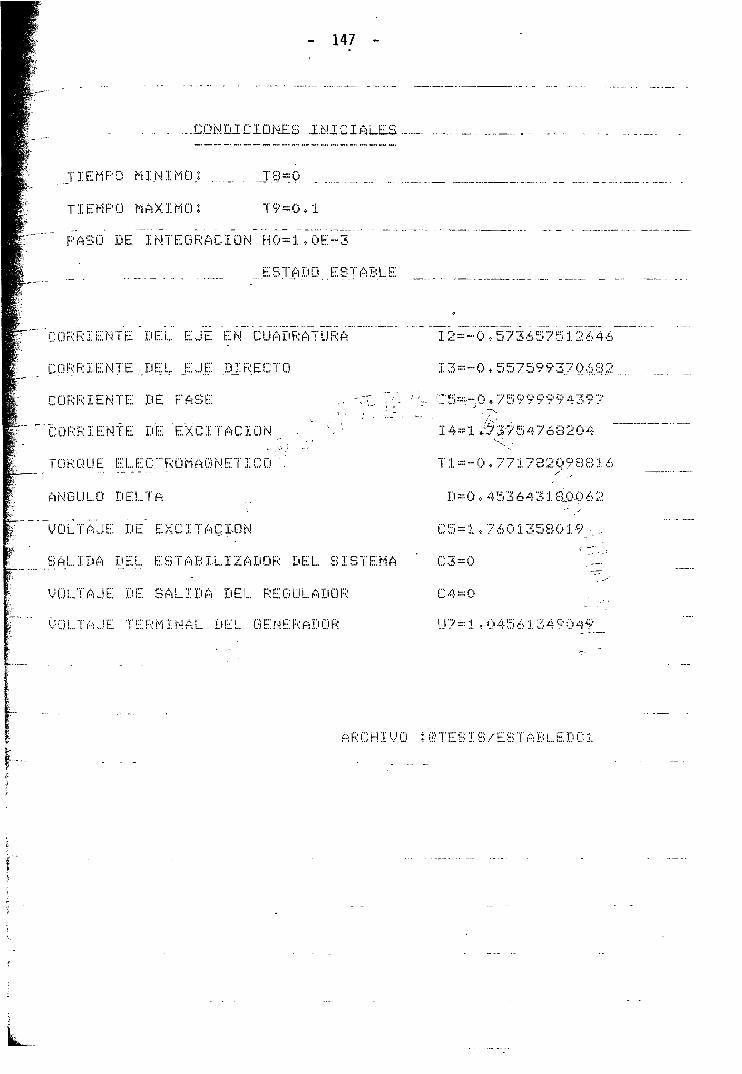
- 147 -
Ü.QNIÜ: CXQMES . .itLLCí ALES ....
TIEMPO, MINIMÜj _._T_8=0.. _
TIEMPO MÁXIMO? T9=0,l
PASO DE INTEGRACIÓN HO=1.0E-3
ESTADO ESTABLE
L.
CORRIENTE DEL. EJE EN CUADRATURA
i: p R R 3: E N IE ..D E L EJE .DI R E C T O
CORRIENTE DE FASE ,, '^. ~¿,
"CORRIENTE DE "EXCITACIÓN _ . ' '•''. '
TÜRQUE ELECTROMAGNÉTICO ' .'"
ÁNGULO DELTA
'VOLTAJE' DE" EXCITACIÓN
SAL. I DA DEL ESTABILIZADOR DEL. SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
"UOLTAJE TERMINAL DEL GENERADOR
14
T 1
D
C5
C3
C4
U 7
=-0,573657512646
=-0»5575993706_8_2.
"--0,75999994397
=1 754768204
"-0,7717820988:! 6y
= 0*4536431810.062
= l,7601358019'r .
= 1 04561349045'
A F^ C HIV O í @ T E SIS / E S T A B L. E D C1

-, 148 -
CORRIENTE DEL EJE EN CUADRATURA
O wu H2 i< o
_i i_Q.QI a. az a.as o.m a.oc 0.00 0.07 o.os o.oa o.i
Ticnro .«
CICTCTUS PC C3CXTAC10M PC CORKICNTC CONTINUA TITO PCI
CORRIENTE PEL E-IC DIRECTO
s 5 -í< i '
B. 01 B.DZ O.Q3 O.B-I Q.BC
TIEMPO c«
Q.BS Q.D7 Q.DC Q.QS a.i
ESTADO ESTABLE

- 149 -
CORRIENTE DE FASE
O.DI Q.BZ Q.Q3 O. OH O.BC B.O0 Q.DS a. i
^Ia^ro c.
DC cxexTACion pt CORIUCNTC CONTINUA Tiro reí
CORRIENTE: DE EXCITACIÓN
* rc 2
a |e u
B.BI 8.B2 B.Ú3 Q.B-t Q.BE O.B6
TIEMPO C««8J
ESTADO ESTABLE
o. a? e.oe 0.03 o.i

- 150 -
RCALIMCKTACION DEL VOLTAJE PE EXCITACIÓN
•<
2 5S»1U-2
5 I
B.BI a.az o.i» O.B0J
a.07 o.oe a.na Q.I
C3CTEMAS Pr EXCITACIÓN PC CORRIENTE CONTINUA Tiro PCI
VOLTAJE PC CM TPA PCL RCBULA0OR
a. DI B.BZ B.D3 O.B-» B.K
TIEMPO
B.B6 B.B7 B.BC B.aa 1.1
ESTADO ESTABLE

- 151 -
I
VOLTAJE DE EXCITACIÓN
y
a o.ni a.BZ 0.03 a.a-t a.ac a.00 a.a? o.oc o.oa a.i
Titnro c—,3
cicrcruc PC c crrACIÓN oc CORRIENTE CONTINUA TITO oci
VOLTAJE TCRHINAL DEL CENEK&POR
a a.DI o.az 0.03 O.B-I B.BC O.B6 Q.B7 B.BS Q.BS Q.l
TIEMPO c««a3
ESTADO ESTABLE

- 152 -
JORQUE ELECTROMAGNÉTICO
10f»
eo
a.ai Q.BZ a.os a.cu a.ac a.00 a.o? a.ae a.t
ticnro ¿_|3
DC EXCITACIÓN DE CORRIENTE CONTINUA TITO DC1
pesvxtczort PC LA VCLOCIDÍD ROTÓRICA
od
a.ai a.az a.B3 B.D-I e. BE o. os O.D7 O.B6 a.aa
TIEMPO c««»3
ESTADO ESTABLE

- 153 -
•y r>•• m
2 32 r"5 .•
ÁNGULO DE POTENCIA
i ia a.DI o.BE a.as a.a-i a.ac a.ae a.a? a.ae a.i
Titnro í—«i
Í1CTCTU5 DC C3ÍCI7ACIÓN OC CORRIENTE CONTINUA TITO DC1
L.
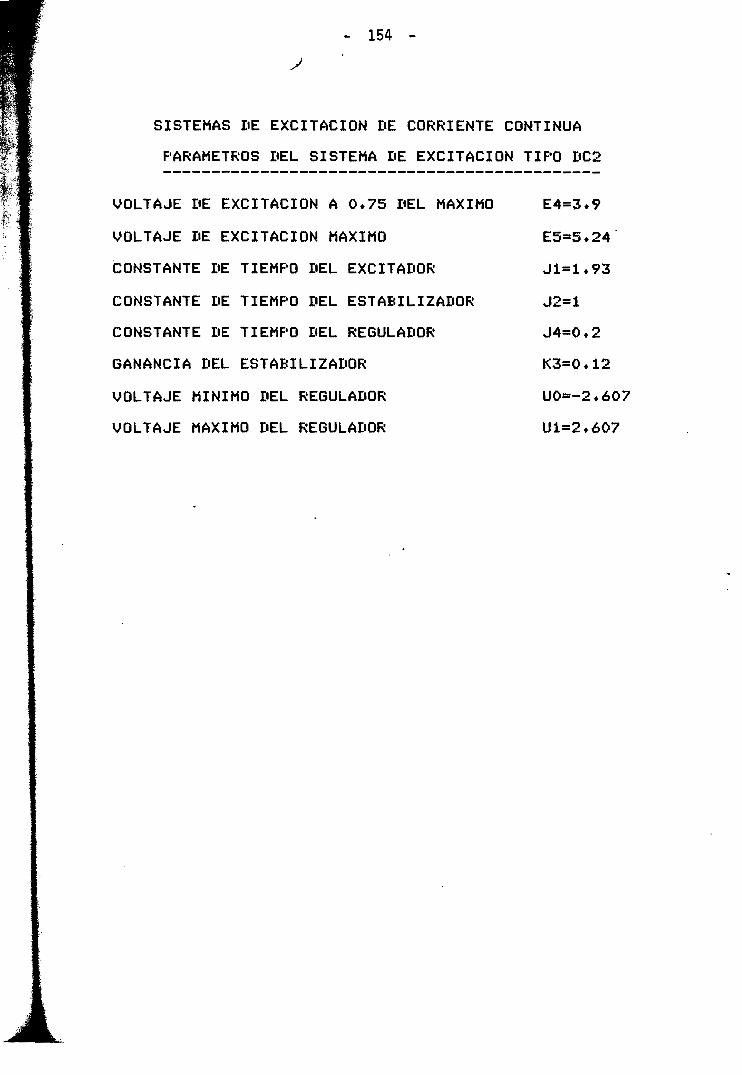
- 154 -
SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO DC2
VOLTAJE DE EXCITACIÓN A 0*75 DEL MÁXIMO
VOLTAJE DE EXCITACIÓN MÁXIMO
CONSTANTE DE TIEMPO DEL EXCITADOR
CONSTANTE DE TIEMPO DEL ESTABILIZADOR
CONSTANTE DE TIEMPO DEL REGULADOR
GANANCIA DEL ESTABILIZADOR
VOLTAJE MÍNIMO DEL REGULADOR
VOLTAJE MÁXIMO DEL REGULADOR
E4=3.9
E5=5«24
Jl=l*93
J2=l
J4=0,2
K3=0,12
U0=-2»607
Ul=2*607

- 155 -
CONDICIONES INICIALES
TIEMPO MÍNIMO: TS=O
TIEMPO MÁXIMO: T9=o,i
PASO DE~ INTEGRACIÓN H0=0.002
ESTADO ESTABLE
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR DEL SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0.573657512646
I3=-0«557599370682
I5=-0,75999994397
14=1.73754768204
Tl=-0.771782098816
D=0«453643180062
C5=l.7601358019
C3=0
C4=0
U7=l.04561349049
ARCHIVO 5(?TESIS/ESTABLEDC2

- 156 -
SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO AC1
VOLTAJE DE EXCITACIÓN MÁXIMO E5=3
CONSTANTE DE TIEMPO DEL EXCITADOR Ji=l»3
CONST. DE TIEMPO DEL ESTABILIZADOR J2=l
CONST. DE TIEMPO DEL REGULADOR DE VOLTAJE J4=0.02
CONSTANTE DE DESMAGNETIZACIÓN K2=0.38
GANANCIA DEL ESTABILIZADOR K3=0,03
GANANCIA DEL EXCITADOR K4=l
GANANCIA DEL REGULADOR DE VOLTAJE K5=400
VOLTAJE MÍNIMO DEL REGULADOR R8=-2,73
VOLTAJE MÁXIMO DEL REGULADOR R9=2.73

- 157 -
CONDICIONES INICIALES
TIEMPO MÍNIMOí T8=0
TIEMPO MÁXIMO: T9=o*i
PASO DE INTEGRACIÓN: H0=o*oo2
ESTADO ESTABLE
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR DEL SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0.573657512646
I3=-0.557599370682
I5=-0.75999994397
14=0 * 00122777554867
Tl=-0«771782098816
D=0*453643180062
£6=1.7601358019
C3=0
C4=0«645170354984
U7=l«04561349049
ARCHIVO íeTESIS/ESTABLEACl

- •158 -
CORRIENTE DEL EJE EN CUADRATURA
2 H
2 7
I
0 S nn 2 7
1 1
7«
a. ai o.ar a.aa a.o-t a.re a.no a.a? a.as o.aa
TIEMPO c—o3
CICTEHA£ DE EXCITACIÓN DE CORRIENTE ALTERNA TIPO ÍC1
CORRIENTE DO. CJC DIRECTO
a.Bi B.BZ t.ea a.cu B.BC a.ae e.a? e.ae e.aa
TIEMPO c.,8i
ESTADO ESTABLE
a.i
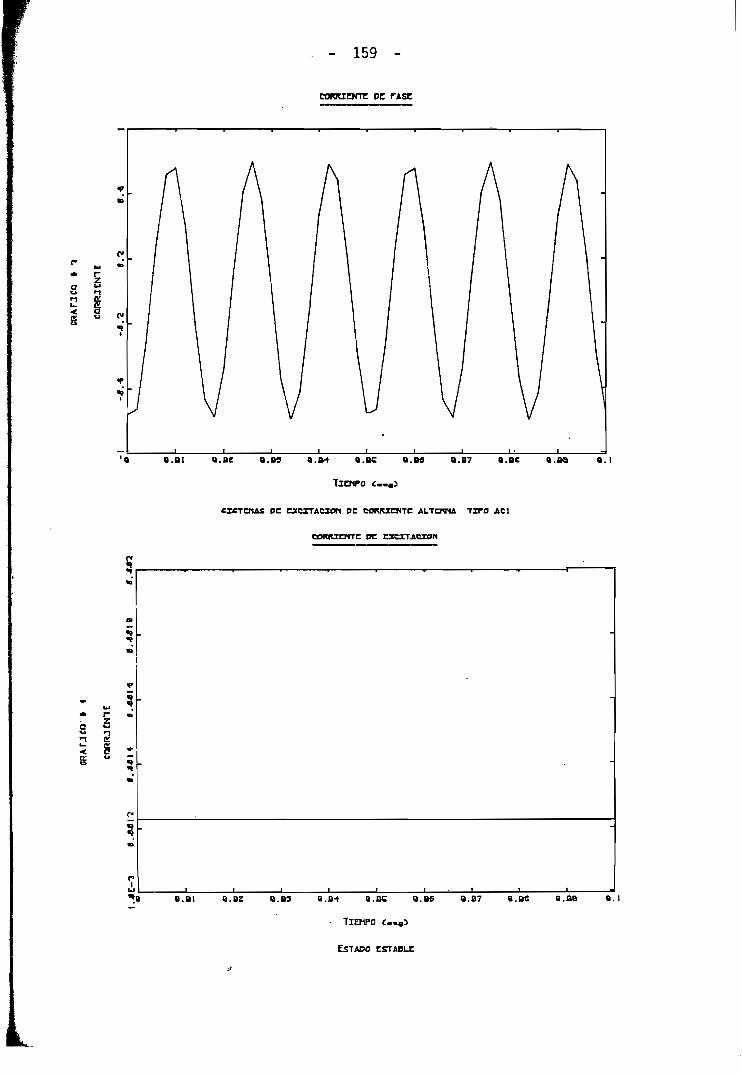
- 159 -
CORRIENTE DE TASE
n aU. (V< Cg "
'a a. ai a. ae a. as e.D-t a.nc a. 00 a. a? a.oe a.ea
PC cjcciTAUori DC CORRIENTE ALTERNA Tiro ACI
CORRIENTE PE EXCITACIÓN
7UJ
*».B B.B1 Q.BZ Q.03 B.B-t B.BG B.B6 8.D7 B.BC 8.
• TIEMPO ¿.m»i
ESTADO ESTABLE
L

«-> rn -ti- o
g
-, 160 -
KEALIHENTACION DEL VOLTAJE DE EXCITACIÓN
a.ai a.az o.no a.a-t a.ae a.ae a.a? a.ae a.ai e.i
TiEnro í—.3
CICTETIAC DE CJCCITACION DC CORRIENTE ALTERNA Tiro ACI
VOLTAJE DE SALIDA DEL REGULADOR
o 3*• rn -i
a a.ai a.az a.B3 a.a-4 a.BE a.as a.a? a.ae a.na a.i
TIEMPO c***3
ESTAPO ESTABLE

-. 161 -
VOLTAJE DE EXCITACIÓN
O <" rn -i
t i i i io.ai a.az a.no a.a-4 Q.BC a.ae a.B7 o.oc a.oa a. i
Ticnro
CJCCTD1AC DC CXCTTAC3ON PC COKIUErrTC ALTERNA TITO ACI
VOLTAJE
a a.ai B.BZ a.B3 a.B-4 B.BC B.B6 B.B7 B.BC a.
TIEMPO e.^.,3
ESTADO ESTABLE
a.i

a R1
g
C\
Hvo
E
«-"
ti d I 1-
1 Í
1
/•»
- ift-
»
¿'B
- W
t-
1 ' - - - - -
e¿
'r-
a*
0 s a • i £
r^
P
•
3
•• E
i j ;
T,
1 3
5 s
S 5H ,
y
•-
o
n
5 S
IB
aÜ
6
S K
-**
y
> §
a a a
1
1
-
-
,
- - . -
a S o a r> a o S "
u
r d
» j
G«
P u
0 i §
S 2
* "
&
a a s a N a o a o nf.
i •»
s-í-
'i .
t sr-
t-
\-f-

- 163 -
ÁNGULO DE POTENCIA
*~ 3I I
a a.ai a.ae a.as a.a-t a.ac a.ae a.a? a.ae a.a* a.i
Txcnro c«—«3
««TEMAS DE EXCITACIÓN PE CORRIENTE ALTERNA TICO AC1
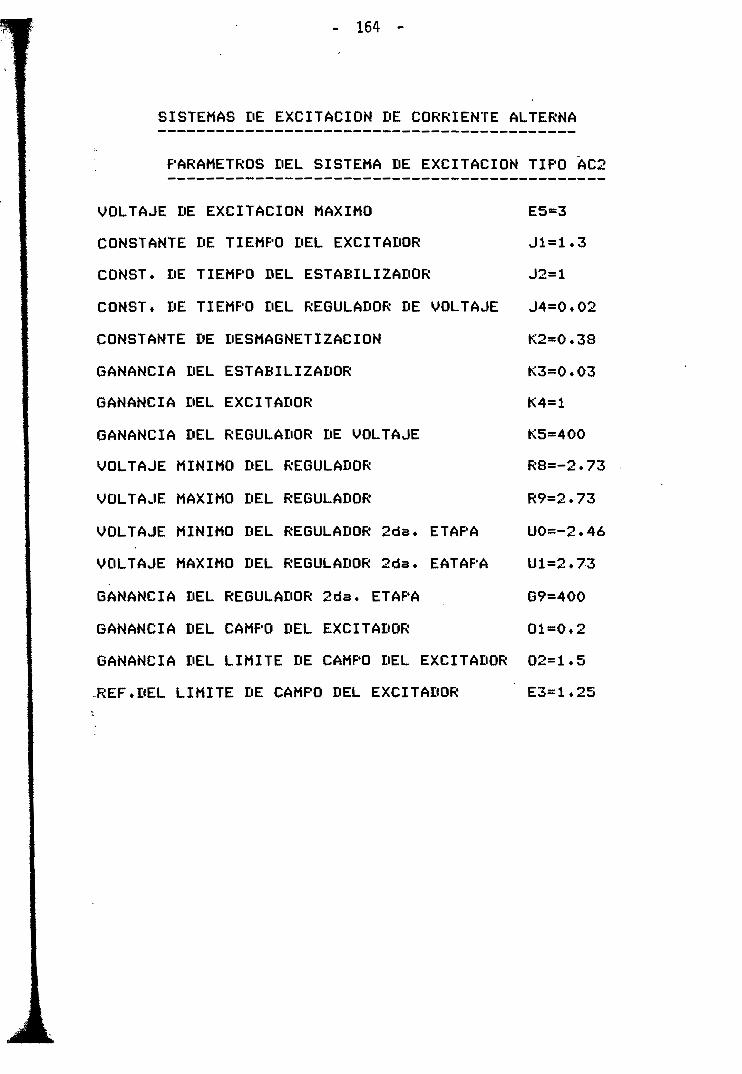
- 164 -
SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO AC2
VOLTAJE DE EXCITACIÓN MÁXIMO E5=3
CONSTANTE DE TIEMPO DEL EXCITADOR Jl=l*3
CONST» DE TIEMPO DEL ESTABILIZADOR J2=l
CONST. DE TIEMPO DEL REGULADOR DE VOLTAJE J4=0»02
CONSTANTE DE DESMAGNETIZACIÓN K2=0.38
GANANCIA DEL ESTABILIZADOR K3=0*03
GANANCIA DEL EXCITADOR K4=l
GANANCIA DEL REGULADOR DE VOLTAJE K5=400
VOLTAJE MÍNIMO DEL REGULADOR R8=-2«73
VOLTAJE MÁXIMO DEL REGULADOR R9=2.73
VOLTAJE MÍNIMO DEL REGULADOR 2ds, ETAPA UO=-2*4Ó
VOLTAJE MÁXIMO DEL REGULADOR 2ds, EATAPA Ul=2.73
GANANCIA DEL REGULADOR 2d3« ETAPA G9=400
GANANCIA DEL CAMPO DEL EXCITADOR 01=0«2
GANANCIA DEL LIMITE DE CAMPO DEL EXCITADOR 02=1*5
REF*DEL LIMITE DE CAMPO DEL EXCITADOR E3=l«25

- 165 -
CONDICIONES INICIALES
TIEMPO MINIMOÍ T8=0
TIEMPO MAXIMOÍ T9=0,l
PASO DE INTEGRACIÓN: H0=o,oo2
ESTADO ESTABLE
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORGUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR DEL SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0,573657512646
I3=-0 * 557599370682
I5=-0 * 75999994397
14=0,00122777554867
Tl=-0»771782098816
D=0,453643180062
£6=1,7601358019
C3=0
C4=0,130646996884
U7=l,04561349049
ARCHIVO J0TESIS/ESTABLEAC2

CR
AF
JCQ I 1
CO
RR J
CN
11
•£••
• -*•*
-*•»
-*•'
-".-
2
-"•'
«B B B B b N B b u B
E?
- *
-1
H
R °
R
S í
ni
B b 01 B 3 B S B 5 B
- . . - - - - 1l
l i
| l
B b B
fi *
jj n
B
S S
3
! e
*g
§ ^
na
9
23
•
fl í
SH
«^
0
n §
B b
1 "
t> _
S "
"
P n B 5 B
- - " - ~ _ 11
11
(1
§ l H S 5 S c •»

\.4t-
-3O
!•••
- •
•
5 í?
I S .
3 ?
«S
{
"
" p 5
8.4
41
?
CR
AT
JCn
I 4
CQ
RR
JtN
TC
1.4
41
t 1.4
41
1
c g
n o
CT>
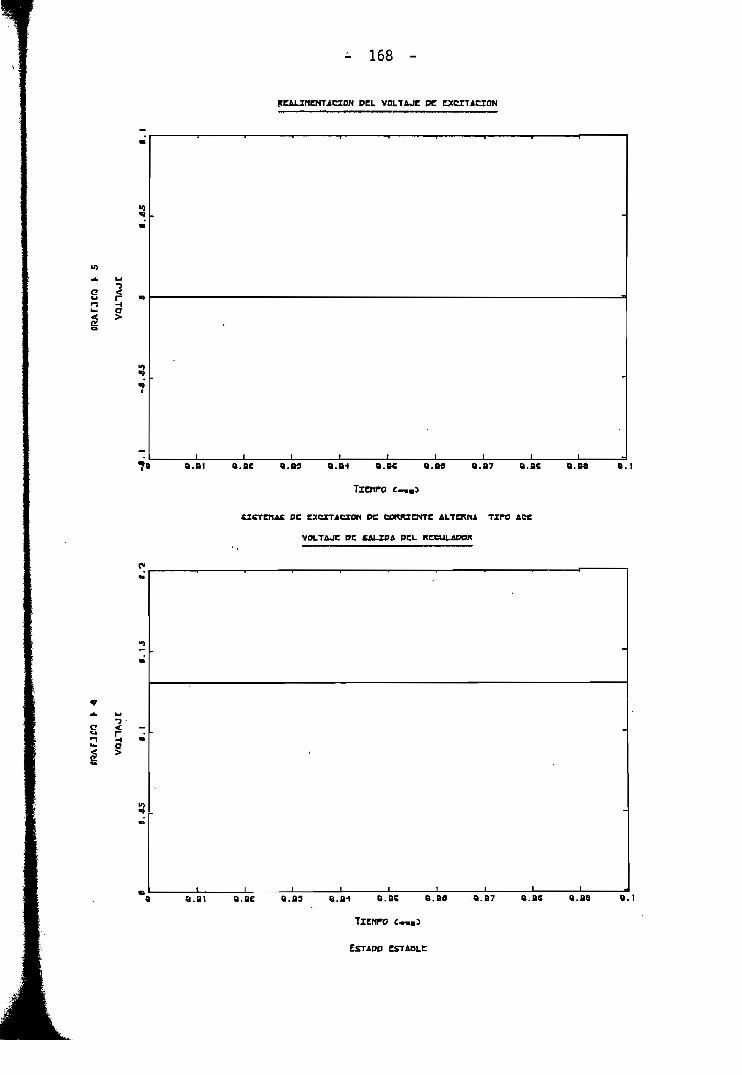
- 168 -
HCALItlENTACION DEL VOLTAJE PC EXCITACIÓN
s ?n -i< §
a.oi «.ae
_i_
o.a-t «.ae 0.07 a.ae a.
Txcnro ¿_.
ciererus PC CXCXTACZON PC CORIUCNTC ALTERNA TIPO ACC
VOLTAJE PC SALIDA PCL RECULADO*
_i_ _i_Q.B1 Q.BE Q.B3 O.B-t O. BE Q.B6
TIEMPO c~.«3
ESTADO ESTABLE
e.o? e.B6 Q.aa

- 169 -
VOLTAJE PC EXCITACIÓN
* u
c 3
a a.ai a.ae o.as a.a-» a.ac a.ae a.a? a.ae a.aa a.i
Tienro £«•>
CICTCIUC PC EXCITACIÓN PC CORRZCNTC ALTCIVU Tiro ÍCC
VOLTAJE TEWimiL
a. ai a.ae e. os e. a-» e.oc a.oe a. a? e.ae a.aa a.:
TIEMPO c..,i
ESTADO CSTAOLE
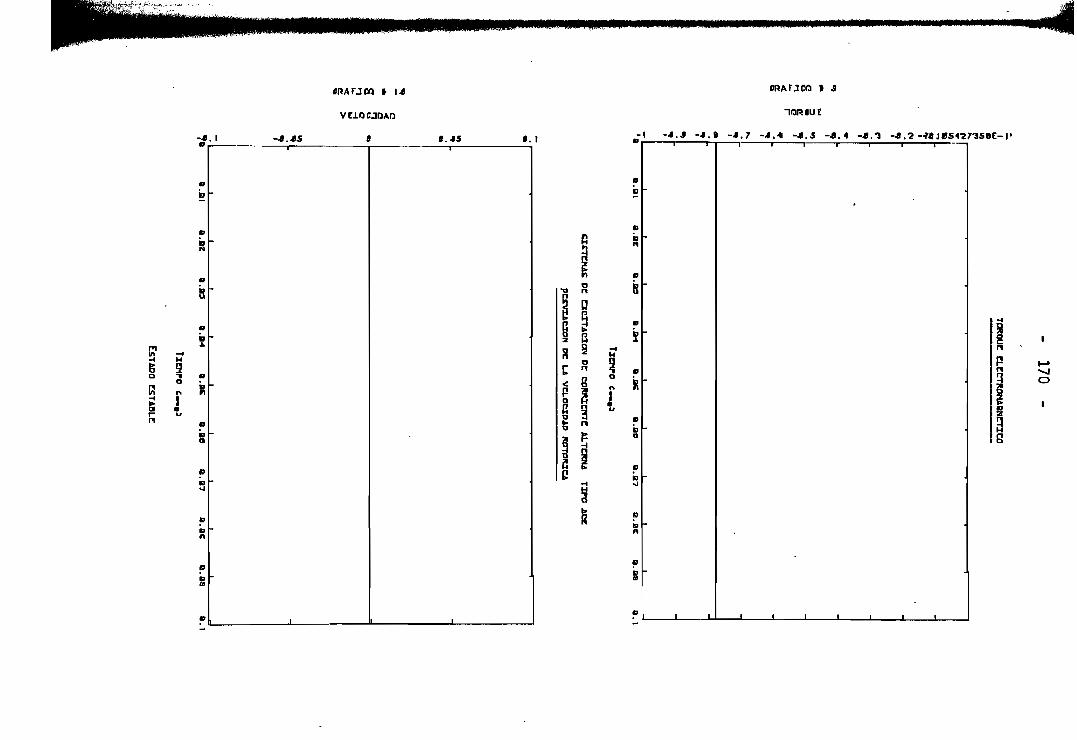
ÍRA
FJ
Cn
» |J
VC
1QC
JDA
D
OR
AC
JCQ I
J
1QR
OU
C
-.8 0 e O B R O 3
3!
!0
10
5 f
*"
"
e S o B vi
0 B n 0 B 19 B
. 1
-*.*
S
t I.JS
1.
. • - - • • -
.
0 D 0
fi s
n
«o
5
K
M
1 g
?X
S
Efc
s 3 .
< §
: Ri
" •
«
. D
|
?
°
P H
5V
* s i 0 gi
-».a
-4
.1
• ' . - - - i |
i
-4.7
-4
.4
-t.s
-t
. 4 -
«.i
-a
.-2
-me
sn
i i
i i
i i
t
1 1
1 1
l f
f
ruat
- -4 P n 3 ¡
&G
NE
TICO

. - 171 -
ÁNGULO DE POTENCIA
<
a a.ni a.ae a.as a.a-t a.ac a.ae a.a? a.ae a.M a.i
Ticnpo
CZCTETIAS DE E3CXTACXON DE C TE ALTERNA TITO ACC

- 172 -
PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN ESTÁTICOS
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO ST1
CONSTANTE DE TIEMPO DEL REDUCTOR J2=l
CONSTANTE DE TIEMPO DEL REGULADOR J4=0*02
GANANCIA DEL REDUCTOR K3=0«03
GANANCIA DEL REGULADOR K5=400
VOLTAJE MÍNIMO DEL REGULADOR Iré,E» R8=-l*2
VOLTAJE MÁXIMO DEL REGULADOR Ira«E R9=l,2
VOLTAJE MÍNIMO DEL REGULADOR 2ds,E, UO=-3
VOLTAJE MÁXIMO DEL REGULADOR 2de,E* Ul=3

- 173 -
CONDICIONES INICIALES
TIEMPO MÍNIMO; TS=O
TIEMPO MÁXIMO: T9=o.i
PASO DE INTEGRACIÓN: Ho=o,oo2
ESTADO ESTABLE
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0,573657512646
I3=-0 * 557599370682
I5=-0,75999994397
14=1*73754768204
Tl=-0.771782098816
D=0«453643180062
C5=l«7601358019
C3=0
C4=l,7601358019
U7=l«04561349049
ARCHIVO:@TESIS/ESTABLEST1

- 174 -
CORRIENTE DO. EJE EN CUADRATURA
c 2 <"" Í ?Í e
o o «"0 1 Bn e 7
a.ai a.ac o, os a.a-t a.ac a.00 a.a? a.ae a.aa e.i
Tiewro
GICTErUS DE EXCITACIOn ESTÍTICOS Tiro £T1
caimzerrrc DEL EJC DIRECTO
i ia.DI o.az a.es a.a-4 B.BC a.B6 a.a? a.as a.aa a.i
TIEMPO c—a}
ESTADO CSTADLE
1

- 175 -
CORRIENTE DE TASE
a.ni Q.BC a.D3 a.o-t a.oc «.00 a.a? B.BC Q.M e.i
Ticrtro ¿«,«1
CZCTCTtA£ PC CXCZTACZON ESTÁTICOS TIPO £TI
CORRXCMTC OC CXCXTACXOM
< .og - -
Q.BI O.BZ O.D3 8.0-t 8.BE 8.D6 8.B7 G.B6 6.B3 a. 1
TIEMPO <««.)
ESTADO CSTAOLC
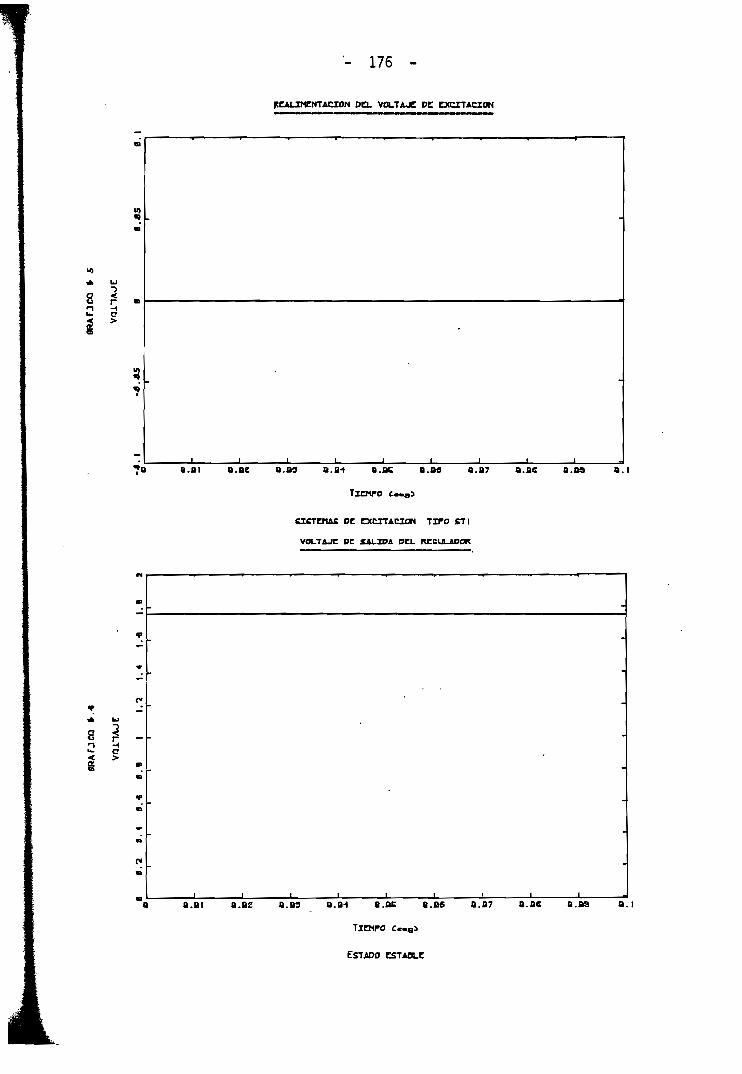
- 176 -
PULIMENTACIÓN DEL VOLTAJE DE EXCITACIÓN
O>
a.oí O.B3 a.B-t O.OE e.Ofl O.B7 a.as a.na a.i
TIEMPO
DE EXCITACIÓN TIPO «TI
VOLTAJE DC SALIDA DEL REGULADOR
sn -i
c
8.0! Q.B3 O.B4 B.BC Q.B6 Q.B7 o.ae a.os
TIEMPO
ESTADO ESTABLE

- 177 -
VOLTAJE PC EXCITACIÓN
-a a.oí a.ae o.sa a.o-t a.ec a.00 a.o? a.oe e.na a. i
TiEfiro <:_.:>
CXCTCHAS DE EXCITACIÓN ESTÁTICOS Tiro £T1
VOLTAJC TERTtlrUt.
e 3
,o>
a.DI e.oe e.w 8.0-t 8.BE Q.B6
TIEMPO ¿«0,5
ESTADO CSTAOLC
8.B7 Q.BC B.B3 8.1
L.

- . 178 -
S i2 I
TORQUC
Ia.a-t o.ac
TIEMPO
DC EXCITACIÓN ESTÁTICOS Tiro ST1
pCSVIACIOM DE LA VCLOCIPAP ROTORXCi
: 1
a.ai e.Bz a. a? a.a-t a.ac
TIEMPO
a.a?
ESTADO ESTABLE

— L
§ °£ 3
- 179 -
ÁNGULO DE POTENCIA
•a a.oí a.ac a.as o.o* a.ac a. ao
Tienro ¿—,3
a.a? a.ae a.aa a.i
CXCTCrtU PC EXCITACIÓN ESTÁTICOS TICO CTI
L
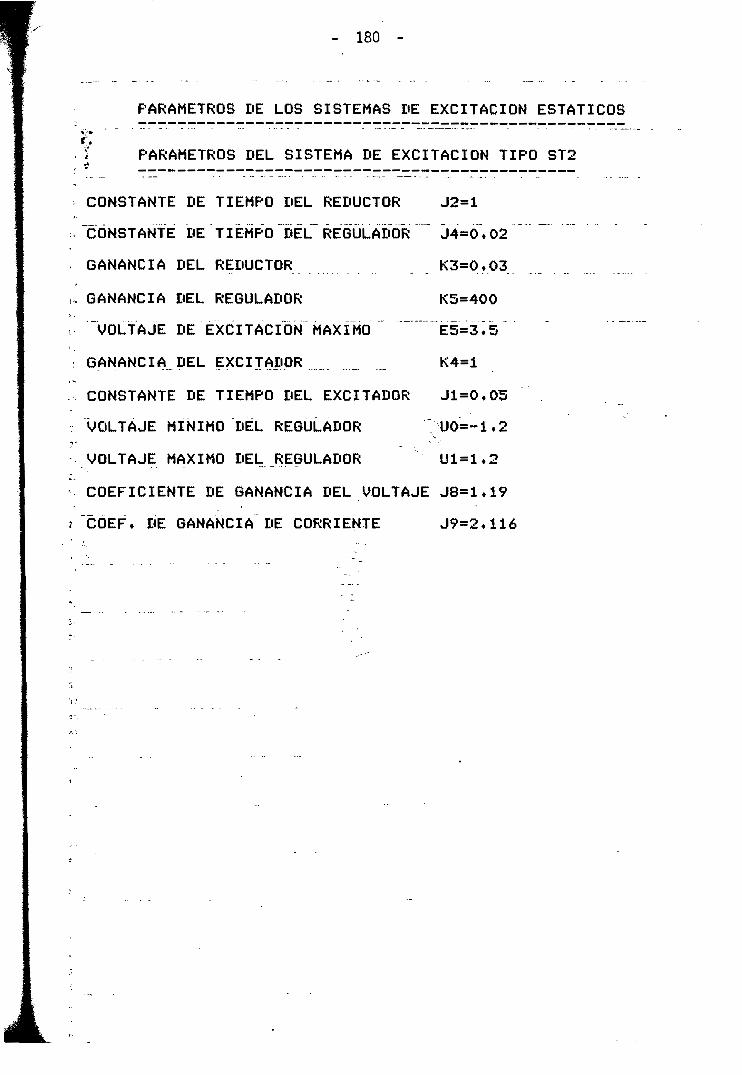
- 180 -
PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN ESTÁTICOS
f"5 PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO ST2
CONSTANTE DE TIEMPO DEL REDUCTOR J2=l
, "CONSTANTE DE TIEMPO DEL" REGULADOR ~ J4=0". 02
, GANANCIA DEL REDUCTOR K3=0*03
,, GANANCIA DEL REGULADOR K5=400
i - "VOLTAJE DE ÉXCITACfÓN MÁXIMO " E5=3«5
; GANANCIA DEL EXCITADOR _ K4=li s
CONSTANTE DE TIEMPO DEL EXCITADOR Jl=0,05
VOLTAJE MÍNIMO DEL REGULADOR ~ V0=-1.2?' • -. -•
VOLTAJE MÁXIMO DEL REGULADOR Ul=l«2
••- COEFICIENTE DE GANANCIA DEL VOLTAJE J8=l*19
r'COEF. DE GANANCIA DE CORRIENTE J9=2«116

- 181 -
CONDICIONES INICIALES
TIEMPO MÍNIMO: TS=O
TIEMPO MÁXIMO: " f9=0ViPASO DE INTEGRACIÓN: _Ho=p.í.po2
ESTADO ESTABLE
ORRIENTE DEL EJE EN CUADRATURA
CORRIENTE, DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
" VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0,573657512646.
I3=-0*557599370682
I5=-0,75999994397
14=0«00122777554867
Tl=-0*771782098816
0=0.453643180062
C5=l,7601358019
C3=0
C4=0
U7=l«04561349049
ARCHIVO:eTESIS/ESTABLEST2
-0V
» 1
CQ
RR
JCN
1C
-4.S
-4
. «
-4.?
-4
.7-J
.J
OR
AC
JCQ
»
I
CQ
RR
JCN
7C
-4.4
-4
.1-í. I
D U 0 5
u
8 f
r-
i*
ls
s í
" NCO
0 53
o n 0 80 S
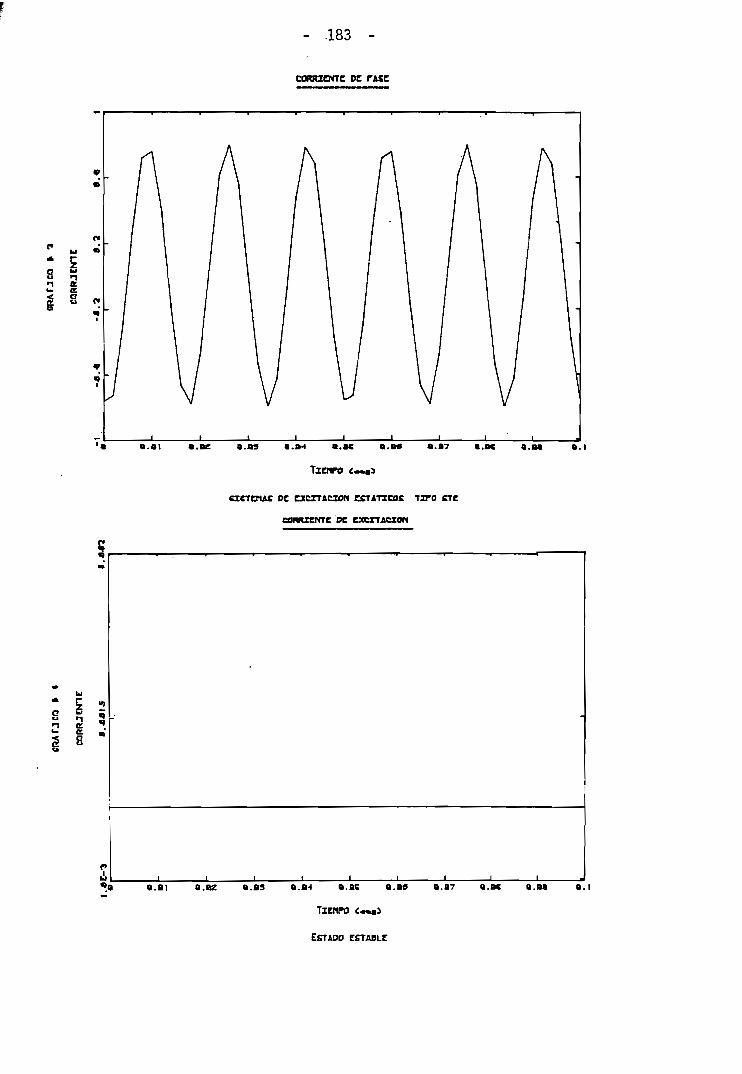
- 183 -
CORRIENTE DE TASC
C Ií S
CXCTCrUC OC OtCTTACJON C£TATXC0£ TITO CTC
PC CXCZTACZON
CR
AfJ
M
»
4
CaR
RJC
NIE
1.4
C--
3
8.4
41
.5
I.J
ttt
-•
i i t i i i i i i _1 O.Bl O.BZ B.B3 B.B4 B.BC Q.B6 B.B7 B.BC B.B8 B.
TIEMPO ¿mi
ESTADO ESTABLE

- 184 -
(«ALIMENTACIÓN cer VOLTAJE DE EXCITACIÓN
o" r3-(o
a.ai a.ae a.as O.BH o.BE a.Be
Ticnro ¿_.:>
B.a? a.ae a.aa
«icTeru£ PC cacrTACion ESTÁTICOS TITO ere
SALIDA DO. RCCULAPOR
a.BI B.BZ B.03 a.B-t a.ac
TIEMPO
ESTADO CSTABLC
a.as a.aa a.I
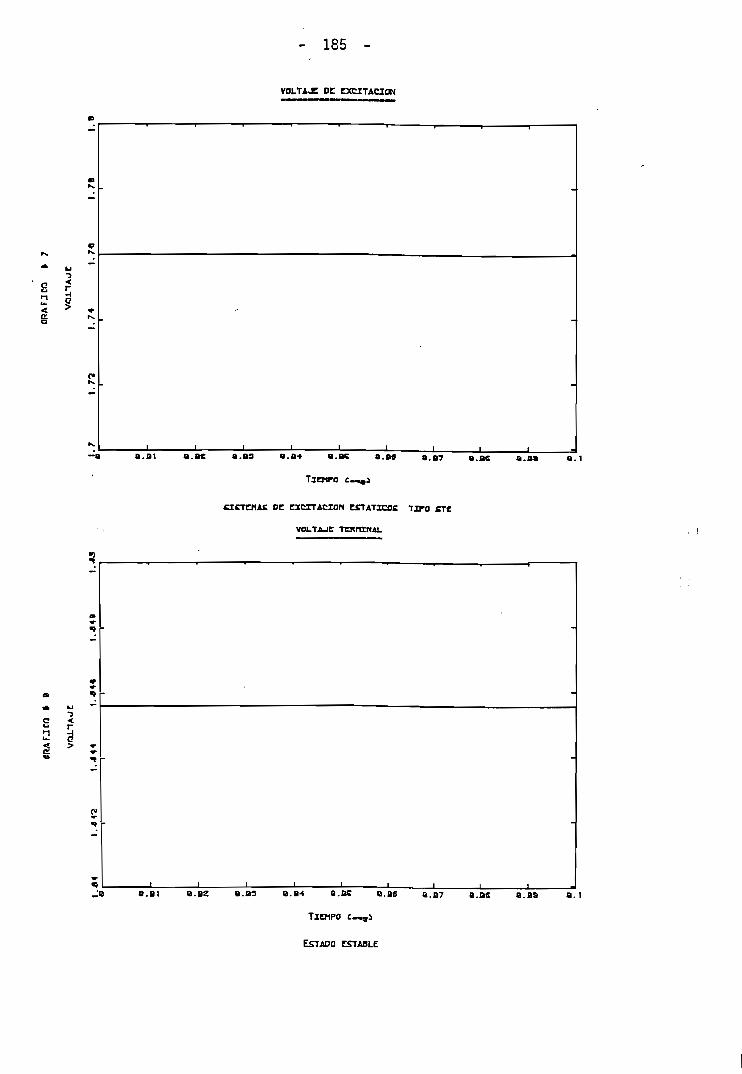
- 185 -
VOLTAJE DC EXCITACIÓN
8 I2 o
a.01 o.az o.B3 O.B+ a.ac o.as O.D? a.ae a.oa a.i
TIENTO c—ei
dCTCMJÍ BC EXCITACIÓN ESTÁTICOS TITO ST«
VOLTAJE
-V
»
^
<p
0> «í
* U *~•5
S <r
1 -4U. (J
^ > *"01 »~ «í
2«í
V
^
-
"
•
1 1 1 1 1 i_ , , ,je a. ai a.az a. os 0.04 a.oc a.oe B.B? a. as a. as a.
TIEMPO c..a3
ESTADO ESTABLE

- 186 -
O Í
; 9
TORQUC CLCCTRDTUGNCTICD
I I _J I*}a a.ai a.ae a.as o. a-» a.ac o.oe a.a? e.ae o.na a.i
Tienro c.-
CZCTCrttC DC UCCXTACZON CZTATICOS TZTO CTC
pCSVIiCION PC LA VELOCIDAD ROTÓRICA
.81 B.B2 B.B3 B.B4 a.BC B.B6 B.B7 8.
TIEMPO c««a)
ESTADO ESTABLE
e.as a.i

- 187 -
ÁNGULO DC POTENCIA
»a a.oí a.ae 0.03 a.B-» e.ac
Tzenro e.
a.ae a.a? a.ac a.aa a.i
DC CXCITZCION CSTJTJCDS TITO CTC

- 188 -
8.2 CAMBIO BRUSCO DE LA CARGA
El generador sincrónico puede ser controlado por intermedio de
dos variables que son: la corriente de campo (IFD) y e^ torque mecánj[
co en el eje
Cuando una de ellas o ambas son alteradas, las siguientes magni^
tudes se ven afectadas: potencia activa generada, potencia reactiva ge
nerada, voltaje terminal y la frecuencia.
Existe una relación directa entre el torque de entrada de una nía
quina individual y la velocidad del sistema, o lo que es lo mismo su
frecuencia, de igual manera se puede decir que la magnitud de una barra
individual de voltaje puede ser controlada y fijada por manipulación de
la corriente de campo.
Para realizar un cambio brusco de la carga se varía bruscamente
el torque mecánico en cualquier instante de tiempo.
El generador, antes de producirse el incremento brusco del tO£
que, tiene por condiciones iniciales potencia aparente, voltaje y fa£
tor de potencia, y para el caso de los sistemas de excitación las condj_
clones iniciales dependen de los sistemas de excitación y éstas se caj_
culan de acuerdo a lo que se especifica en el Capítulo VII, literal
7.3.
Se ha seleccionado como ejemplo a un generador que esta conecta^
do a través de un transformador y una línea de transmisión a una barra
- 189 -
infinita con su respectivo sistema de excitación, funcionando en estado
estable y que en un instante cualquiera de tiempo se produce el cambio
repentino del torque, esto es, al torque negativo inicial (-0.7717 p.u)
se añade un torque negativo del 30% del torque inicial (-0.2315p.u) si¿
nifi cando que la máquina entrega mayor potencia. El ángulo en el in£
tante de la perturbación se considera para la condición en que la C£
rriente de fase pase por 90°.
Ante la variación del torque mecánico en el generador comienzan
a actuar los sistemas de excitación mejorando el comportamiento del voj_
taje generado tratando de mantener el voltaje en el valor del voltaje
de referencia el mismo que es tomado como un valor igual al valor del
voltaje terminal en estado estable.
8.3 ANÁLISIS Y COMPARACIÓN DE RESULTADOS
a) MAQUINA SINCRÓNICA SIN SISTEMAS DE EXCITACIÓN
La estabilidad de un sistema compuesto de: un generador sincrónj[
co, una línea de transmisión, depende de los parámetros del generador
de la línea de transmisión y de la constante de inercia de la máquina.
La reactancia de la línea de transmisión influye en la estábilj_
dad del sistema de potencia, pues a menor reactancia las oscilaciones
disminuyen.
La estabilidad mejora con la disminución de la reactancia del ge_
nerador (reactancia subtransitora de eje directo X'd).

- 190 -
La inercia de un generador sincrónico es también un factor en el
problema de estabilidad, puesto que influye en el período natural de os^
cilación del sistema eléctrico de potencia, o el tiempo que requiere pa^
ra alcanzar la estabilidad, por lo tanto a una mayor constante de iner^
cia el sistema es más estable.
Para comprobar el correcto funcionamiento del sistema máquina
sincrónica-línea de transmisión, sin considerar los sistemas de excita^
ción ante el incremento brusco del torque se compara con los resultados
obtenidos en la referencia \i\ se puede observar que el comportamiejí
to de las distintas variables es equivalente, notándose que el sistema
simulado es más oscilatorio; esto se debe a que los parámetros del gene
rador, línea de transmisión, transformador, constante de inercia-y por.
centaje de variación del torque son distintos a los de dicha referencia.
De los resultados obtenidos en la simulación se observa que la
corriente de fase inicialmente oscila bruscamente, para después ir es_
tabiTizándose en un nuevo punto de funcionamiento en aproximadamente
6.5 seg. dado por el incremento brusco del torque mecánico de la máquj_
na impulsora, (gráfico N2 3).
Al producirse esta perturbación, la corriente de excitación osci_
la sobre su valor inicial, para exponencialmente amortiguarse hasta vol_
ver al mismo valor inicial, esto se debe a que no tiene acoplado el sis^
tema de excitación, (gráfico N£ 4); es decir, el circuito de campo no
es alterado.
El ángulo de potencia crece bruscamente y oscila hasta su nuevo

-. 191 -
punto de funcionamiento; al incrementarse la potencia generada por el
incremento del torque mecánico, el ángulo de potencia se ajusta para
cumplir ese requerimiento, (gráfico N£ 5).
El torque electromagnético se ajusta a la perturbación,
do hasta tomar el valor impuesto por la suma del 30% del torque inicial,
(gráfico N* 6).
En el gráfico de la velocidad, se puede observar que frente a
la variación brusca de la carga, el rotor inicialmente aumenta su velo^
cidad para luego oscilar sobre la velocidad sincrónica, hasta alcanzar
esta velocidad, (gráfico H- 7).
En el gráfico N£ 8 se observa que el voltaje terminal no es con,s
tante como se ha venido realizando en trabajos anteriores, y además se
observa que no regresa al valor inicial; esto es evidente, pues si se
mantiene la corriente de campo constante, a medida que la carga ha va^
riado, el voltaje terminal variará.
b) MAQUINA SINCRÓNICA - SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
En estos sistemas de excitación la velocidad de respuesta depen-
de de la constante de tiempo TE de la excitatriz, la misma que es dire£
tamente proporcional a la inductancia del bobinado de campo; por lo tají
to, debido a la gran inductancia del bobinado de campo hace que estos
sistemas no respondan rápidamente ante las variaciones del voltaje ter.
mina! del generador sincrónico.

- 192 -
Otro elemento importante de los sistemas de excitación es el re^
guiador de voltaje, el mismo que está determinado por la constante de
tiempo T/\ la ganancia del regulador KA.
Para el caso de los sistemas de excitación de corriente continua
tipo DC1, se observa que la corriente de fase una vez realizada la pe£
turbación, ésta oscila hasta obtener su nuevo punto de funcionamiento
en aproximadamente 6 seg, (gráfico H- 3).
Si se compara con la corriente de fase analizada en el literal
a) se nota claramente que los sistemas de excitación juegan un papel se_'
cundan' o en el comportamiento de la estabilidad del sistema de poten-
cia, pues, el tiempo de estabilización es aproximadamente el mismo.
Al producirse el^ incremento brusco del torque, la corriente de
excitación oscila y va creciendo exponencialmente hasta obtener un nue-
vo punto de equilibrio en aproximadamente 8 seg. (gráfico H- 4). Este
comportamiento es de esperarse pues para mantener el voltaje terminal
del generador constante, a medida que la carga varía es necesario que
la corriente de campo varíe.
En el estado estable la salida del estabilizador del sistema de
excitación se supone cero, éste permanece constante hasta que, una vez
producida la perturbación, esta salida es distinta de cero para luego
volver al valor inicial una vez que el sistema se ha estabilizado, (grá_
fico N£ 5).
La salida del regulador antes del cambio brusco de la carga se
i
- ,193 -
supone igual a cero en este tipo de sistemas, una vez que se produce el
cambio brusco del torque la señal de error de voltaje es distinta a ce
ro, lo que hace que esta señal se amplifique corrigiendo de esta manera
el voltaje de excitación hasta que la señal de error de voltaje sea ce^
ro; es decir, el voltaje terminal sea igual al voltaje de referencia.
Si se observa el gráfico N- 6 se ve que efectivamente la salida del re
guiador una vez que se realiza la perturbación alcanza el máximo pico
en 0.6 seg. para luego ir decreciendo hasta obtener nuevamente el punto
de equilibrio.
El voltaje 'de excitación una vez realizada la perturbación se ob^
serva que crece exponencialmente de una manera lenta hasta obtener su
nuevo punto de equilibrio, debiéndose específicamente a la constante de
tiempo TE de la excitatriz, (gráfico N£ 7).
El voltaje terminal en este tipo de sistemas,como era de esperar;
se, una vez realizada la perturbación se observa que disminuye hasta
aproximadamente 1.04 p.u. en 1.1 seg., para luego, a partir de este pu£
to, volver al valor de referencia en aproximadamente 8 seg. (gráfico N2
8).
El torque electromagnético de igual manera que en el sistema del
literal anterior oscila hasta tomar el valor de -1.01 p.u., (gráfico N-
9).
La desviación de la velocidad rotórica en el momento de la per-
turbación incrementa para luego oscilar hasta que la desviación sea ce_¿ro, (gráfico N2 10).

- 194 -
El ángulo decrece de «ñera Olc11ator1a exponencjatate
el v.,.r estable (0.45 rad., hasta un nuevo punto de ^
próximamente 0.57 rad.,según se indica en el gráfico N£ u.
Para ,cs sistemas de excitaci6n tipo DC2 los resultados guieos
obtenidos son los mismos, por cuanto co» se indicó en e, capitulo IV
la diferencia con los sistemas de excitación tipo Dcl es solante los
Hmites del regulador de voltaje y como en este ejemplo no se ,lega a
los Imites establecidos, los resultados no tienen ninguna modificad,
O «QUINA SINCRÓNICA - SISTEMA DE EXCITAC.ON DE CORRIENTE ALTERNA
Toando en cuenta que ,a respuesta de este tipo de sistemas es
más rápida QUe los siseas de excitaciín de corriente continua, ,a que
la excitación se obtiene a través de un grupo alternador - rectificador
se observa para los sistemas de excitacidn tipo AC1 que ,a corriente de'
fase una vez producida ,. perturbación oscila para luego obtener un nue
vo punto de equilibrio (gráfico N£ 3).
La corriente de excitación permanece constante en un valor a
proximado de 1.74 p.u. Una ve2 que se produce ,a perturbación, Ésta os
día de manera exponencial hasta obtener el nuevo punto de equilibrio
en aproximadamente 5.5 seg. (gráfico N* 4).
El estabilizador del sistema de excitación actúa una vez ,ue se
produce la variación brusca del torque «cínico, e! mismo que vuelve a
proximadamente al valor inicial, según se indica en el gráfico N-° 5
- 195 -
El voltaje de salida del regulador en este caso, como se puede
observar en el gráfico N2 6, llega al límite máximo en aproximadamente
0.3 seg. para mantenerse en el valor de 1 p.u. hasta cuando la salida
baje de este valor. También se observa que en este tipo de sistemas el
valor de estado estable es distinto a cero como se suponía en el cal cu
lo de las condiciones iniciales.
Según se observa en el gráfico N- 7, una vez que se produce la
perturbación como el voltaje terminal disminuye, es obvio que la excita^
ción aumente para que el voltaje terminal regrese a su valor inicial.
Es de hacerse notar que el voltaje de excitación sube inmediatamente
luego de producirse la perturbación alcanzando su pico máximo en 1.4
seg. y estabilizándose en un nuevo punto de equilibrio en aproximadamen^
te 5.5 seg.
En lo que respecta al voltaje terminal se observa en el gráfico
H- 8 para este tipo de sistemas que alcanza su pico mínimo ( 1.04 p.u.)
una vez producida la perturbación en aproximadamente 0.4 seg., además
el voltaje terminal regresa a su valor inicial en aproximadamente 5.5
seg.
El torque electromagnético luego de la perturbación oscila hasta
adquirir su nuevo punto de equilibrio dado por el incremento del torque
(gráfico N2 9).
En el gráfico N- 10 se observa que una vez producido el incremer^
to brusco del torque mecánico la velocidad rotórica inicialmente se iii
crementa para luego oscilar de una manera amortiguada sobre la veloci^
- 196 -
dad del sincronismo.
El ángulo de potencia se observa en el gráfico N2 11 que crece
de 0.45 rad a 0.57 rad de una manera oscilatoria.
Otra variación de los sistemas de excitación de corriente alte£
na son los sistemas de excitación tipo AC2.
Como se puede observar en los gráficos N£ 3 y H- 4, la respuesta
es idéntica a los sistemas tipo AC1.
En el gráfico N- 5 se observa que la salida del estabilizador del
sistema de excitación es cero antes de producirse la perturbación; una
vez que se produce la perturbación esta salida oscila hasta alcanzar
nuevamente el punto de equilibrio en aproximadamente 6.5 seg.
La salida del regulador de voltaje inicialmente tiene el valor
dado por las condiciones iniciales y una vez que se produce el incremen_
to brusco del torque, a diferencia de los sistemas tipo AC1, éste alcajn
za su pico máximo en 0.3 seg., notándose por tanto, que en este tipo no
se llega al límite máximo debiéndose principalmente a la diferencia de
condiciones iniciales que tiene el regulador. La salida del regulador
se estabiliza nuevamente en el valor inicial en aproximadamente 4 seg.
(gráfico N2 6).
El voltaje de excitación incrementa debido a la caída del volt£
je terminal alcanzando su pico máximo en aproximadamente 1.1 seg., para
luego oscilar hasta obtener su nuevo punto de funcionamiento, (gráfico

- 197 -
N2 7).
En el gráfico N£ 8 se tiene la variación del voltaje terminal,
en este punto se puede observar que llega a un pico mínimo de 1.042p.u.
en 0.3 seg. para luego ir aumentando exponencialmente hasta llegar
al valor del voltaje de referencia dado por la condición inicial del
voltaje terminal. A este valor llega en aproximadamente 5 seg.
Al igual que el sistema tipo ACl,el torque electromagnético oscj[
la luego de la perturbación para después estabilizarse en el nuevo valor
dado por la suma de un porcentaje del torque, (gráfico N2 9).
La desviación de la velocidad rotórica y el ángulo de potencia
tienen el mismo comportamiento que los sistemas tipo AC1, (gráficos N£
10 y N2 U).
d) MAQUINA SINCRÓNICA - SISTEMA DE EXCITACIÓN ESTÁTICO
Este sistema se diferencia de los otros sistemas de excitación
puesto que no utiliza una excitatriz rotativa, sino que a través de un
transformador, la potencia eléctrica necesaria es tomada directamente
desde los terminales del generador.
Es por esto que en estos sistemas la velocidad de respuesta debe
ser mayor comparada con los sistemas antes indicados.
Analizando los sistemas de excitación estáticos tipo ST1 se O]D
serva en el gráfico N£ 3 que la corriente de fase tiene el mismo compojr

- 198 -
tamiento que los sistemas de excitación anteriores luego de que se ha
producido el incremento brusco del torque.
De igual manera también la corriente de excitación tiene el mis^
mo comportamiento que los sistemas anteriores, (gráfico H- 4).
La salida del supresor de transitorios en estado estable es cero
y una vez que se produce la perturbación oscila alrededor de este valor
hasta estabilizarse, (gráfico N2 5).
En este tipo de sistemas se observa que la salida del regulador
(gráfico N2 6) es idéntica al voltaje de excitación, (gráfico N2 7),cum
pl i endose de esta manera el análisis hecho para estos sistemas. Se OJD
serva además que alcanza el pico máximo en aproximadamente 0.25 seg.lu£
go de la perturbación y que oscila de una manera amortiguada hasta obte_
ner el nuevo punto de funcionamiento.
En el gráfico N£ 8 se observa que el voltaje terminal disminuye
hasta un valor de 1.045 p.u. para luego oscilar hasta obtener el valor
del voltaje de referencia en aproximadamente 3.5 seg.
En lo que respecta al torque electromagnético, la desviación de
la velocidad rotórica y el ángulo de potencia, tienen el mismo comporte^
miento que los sistemas antes analizados, (gráficos N2 9, H- 10 y N2 11).
Para los sistemas de excitación tipo ST2 la corriente de fase
tiene el mismo comportamiento que el sistema tipo ST1, (gráfico N2 3).
- 199 -
En lo que respecta a la corriente de excitación se observa tam-
bién que su comportamiento es igual al sistema anterior, (gráfico N2 4).
La salida del supresor de transitorios, una vez que se produce
la perturbación, incrementa su valor en aproximadamente 0.3 seg. para
luego ir disminuyendo de una manera exponencial oscilatoria hasta regr£
sar al valor inicial (gráfico N2 5),
El voltaje de salida del regulador en este caso se observa que
disminuye hasta un pico mínimo de -0.4 en el tiempo de 0.3 seg. y oscj_
la hasta estabilizarse en un nuevo punto de equilibrio, (gráfico N2 6).
El voltaje de excitación, según se indica en el gráfico N2 7, aj_
canza su pico máximo en aproximadamente 0.3 seg. y oscila de manera a-
mortiguada hasta obtener su nuevo punto de equilibrio.
En el gráfico N2 8 se tiene la variación del voltaje terminal an^
te el incremento brusco del torque mecánico.
En este gráfico se observa que el pico mínimo tiene un valor de
1.043 p.u. y llega a este valor en aproximadamente 0.3 seg. para luego
regresar al valor de referencia de manera exponencial en aproximadamen-
te 3.8 seg.
El torque electromagnético en estado estable tiene un valor de
-0.77 p.u., luego que se efectúa el incremento brusco del torque en el
30% del torque inicial, éste oscila hasta adquirir su nuevo punto de £
quilibrio, (gráfico N2 9).
- 200 -
La desviación de la velocidad rotórica y el ángulo de potencia
tienen el mismo comportamiento que el sistema anterior, (gráficos N£ 10
y NS ll).
Comparando los resultados obtenidos se observa la efectividad de
los sistemas de excitación, pues si se compara los gráficos N2 4 de los
distintos tipos de los sistemas de excitación y el gráfico H- 4 sin el
sistema de excitación, se observa que la corriente de excitación sube
para compensar la caída de voltaje debido al incremento brusco de la
carga. No sucede lo mismo en máquinas sincrónicas que no tienen siste
mas de excitación, pues en este caso la excitación se mantiene constar^
te y el voltaje generado baja para luego estabilizarse en un nuevo
punto de equilibrio como se observa en el gráfico N- 8.
Comparando los distintos tipos de sistemas de excitación se nota
que la respuesta de los sistemas de excitación estáticos son más rápi-
dos ante cambios bruscos de la carga seguidos de los sistemas de excita^
ción de corriente alterna y de los sistemas de excitación de corriente
continua. La característica de los distintos sistemas se debe, como se
anotó anteriormente, a la ganancia K/\l regulador de voltaje y a las
constantes de tiempo de las excitatrices, pues la ganancia de los regj¿
ladores de voltaje de los sistemas de excitación de alterna y estáticos
es alta y las constantes de tiempo son relativamente pequeñas compara-
das con los sistemas de excitación de corriente continua.
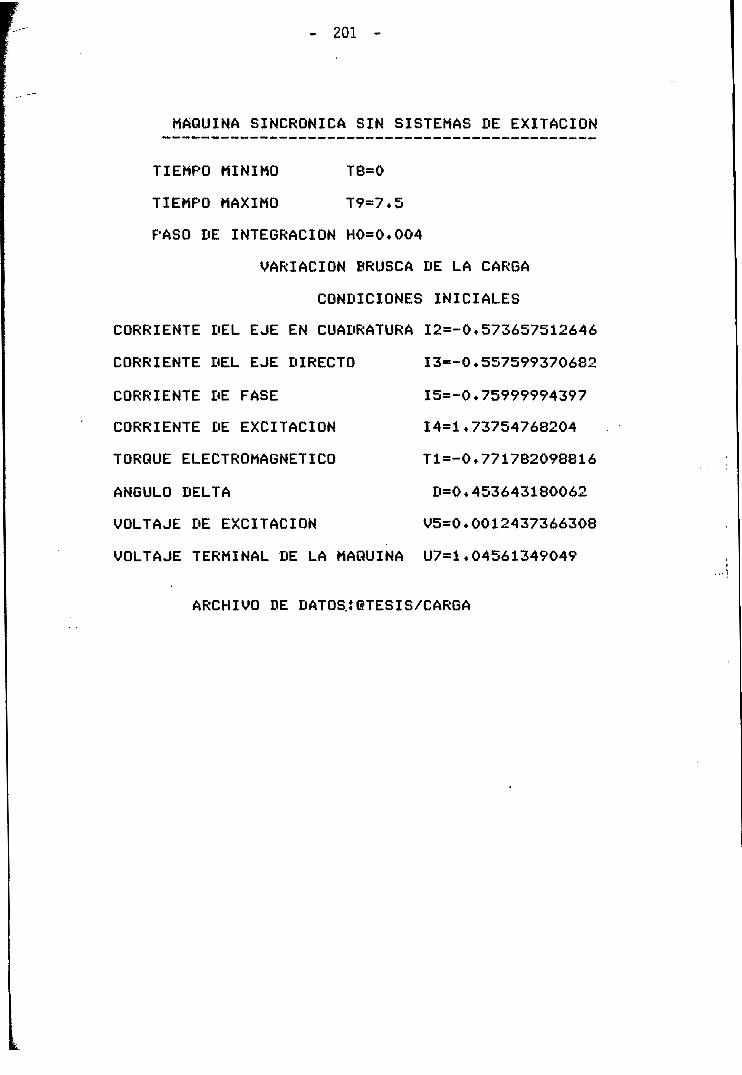
- 201 -
MAQUINA SINCRÓNICA SIN SISTEMAS DE EXITACION
TIEMPO MÍNIMO T8=0
TIEMPO MÁXIMO T9=7,5
PASO DE INTEGRACIÓN H0=0,004
VARIACIÓN BRUSCA DE LA CARGA
CONDICIONES INICIALES
CORRIENTE DEL EJE EN CUADRATURA I2=-0*573657512646
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
I3=-0*557599370682
I5=-0.75999994397
14=1*73754768204
Tl=-0*771782098816
0=0,453643180062
V5=0.0012437366308
VOLTAJE TERMINAL DE LA MAQUINA U7=l«04561349049
ARCHIVO DE DATOS.:6TESIS/CARGA

- . 202 -
CORRIENTE DEL EJE EN CUADRATURA
nte
'a a.E i I.E z Z.s 3 3.s -t- H.S
Ticnro c—,3
).S 7 7.S
CXCTD1A MAQUINA SINCRÓNICA - LINCA DC TIUNCnXClOM
C0KKXDNTC DEL CJC DIRECTO
8
I I I _J I I I I'e a.s v i.s z z.s 3 3.5 « -».s s E.S B e.s 7 7.5
TIEMPO Í«SD
VARIACIÓN BRUSCA DC LA CARCA

-> 203 -
CORRIENTE DE FASE
S 1í »
7» a.c i
CXCTQIA MAQUINA UNCKONICA - LINU occoKRXtrrrc oc CXCXTACIÓN
cun< G c-e u •
8.E 1 1.E Z Z.S 3 3.E -» -4.E G
TIEMPO c—a:>
VARIACIÓN BRUSCA DE LA CARCA
.C 7 7.E
S.S 7 7.E

r 204 -
ÁNGULO DE POTENCIA
§ S< u r»S 5 j¡
I I 1 I I I•O O.E 1 I.C Z Z.E 3 3.C •« -».C C C.C 0 0.C 7 7.C
TIENTO ¿--«i
íicrcnn ruouzru crncKomcj - LXNU DCTDKDUC CLtCTROrUCNCTZCO
7a a.c i i.c • z z.c 3 3.c •» *.c c c.c e e.e ^ ?.c
TIEMPO c««a^
VARIACIÓN BRUSCA DE LA CARGA

- 205 -
PCSVIACICN X LA VELOCIDAD ROTÓRICA
,,'tt O.K 1 I.S Z Z.C 3 3.E 4 4.E G E.E 0 0.E 7 7.Ci
TIEMPO
CICTCMA riAouzru SINCRÓNICA - LINCA oc. TIUNOUCION
VOLTAJE TCRMZNAL
TIEMPO
VARIACIÓN DRUGCA DE LA CARGA
7.S
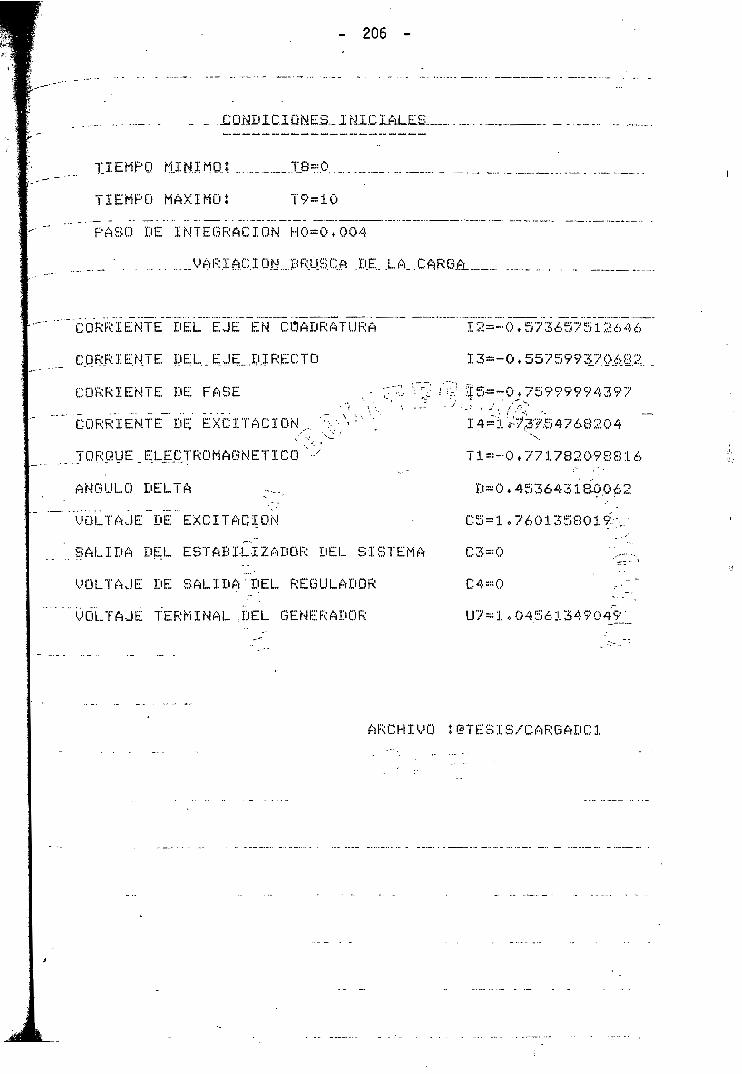
- 206 -
_ £QNÍUC10NES._.1 .MIDIÓLES
IIEMPO M . I N I M Q ? 18=0 __
TIEMPO MÁXIMO i T9=10
"" PASO DE INTEGRACIÓN H0=0*004 ~~"
: VARIACIÓN BRUSCA .D.E...LA..CARGA.
"CORRÍ ENTE ~ D E L~ E JÉ"~EÑ"C ¿ADRAVÜR A ~ 12 ~ -;oT57 3 657 51 6 4 6~
CORRIENTE DEL_E_JE__ILIRECTQ I3=-0*5575993_7.0_6S2
CORRIENTE DE FASE . - '¿T, fg (tí i|5=-.0¿75999994397
""cÓRRIENfÉ~DE EXCITACIÓN,. 'V,"1'• . 14=1 i-7Í3?54768204
JORQUE. ELEJDTROMAGNETICO % :/ TI — O , 771782098816
ÁNGULO DELTA -_.. D=0.453643 ÍS0.062
VOLT A JE "DÉ EXCITACIÓN C5 = l,760135801 '
SALIDA DEL ESTABILIZADOR DEL SISTEMA C3==0 ''\--^
VOLTAJE DE SALIDA :TiEL REGULADOR C4 = 0 ...-'
"VOLTAJE TERMINAL :DEL GENERADOR U7=i*0456i349049:
ARCHIVO ÍSTESIS/CARGADC1

- 207 -
CORRIENTE DEL EJE EN CUADRATURA
urz
CICTCrU£ DE EXCITACIÓN DE CORRIENTE CONTINUA TIPO DC1
CORRIENTE DEL EJE DIRECTO
TIEMPO c«.a3
VARIACIÓN BRUSCA DE LA CARGA

CORRIENTE DE TASE
O u Oí.
ca
Z UJ n
ro o oo
TIE
MP
O
VARIACIÓN
BRUSCA DE L
A CA
RGA
SISTEMAS DE EXCITACIÓN TIPO DCI

a ,o
TIEMPO
DE LA CARejs

e1 i
- 210 -
VOLTAJE DE SALIDA DEL REGULADOR
10
Tienro
cicreriAS ce EXCITACIÓN PC CORRICNTC CONTINUA TIPO oci
VOLTAJE OC EXCITACIÓN
Ticnro c««»5
VARIACIÓN BRUSCA DE LA CARCA
1
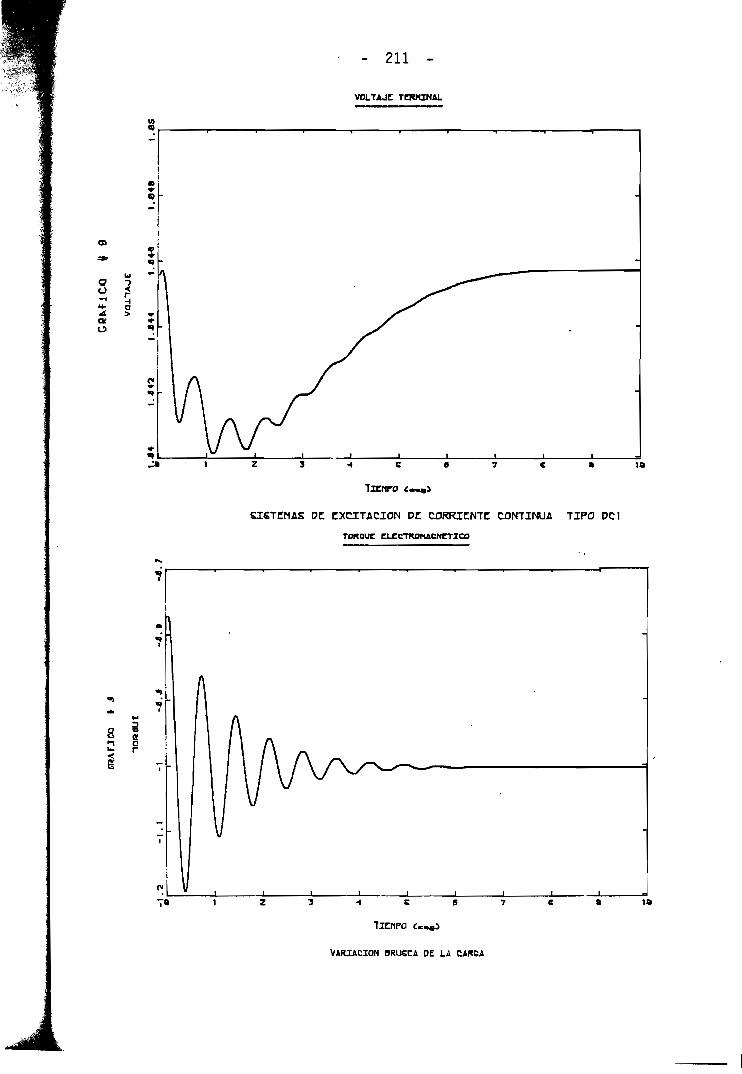
- 211 -
VOLTAJE TERMINAL
s ¿2 FI
SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA TIPO DC1
TOKQUC CLCCTKOMACNCTZCO
TIEMPO <«.«:>
VARIACIÓN BRUSCA DE LA CARGA
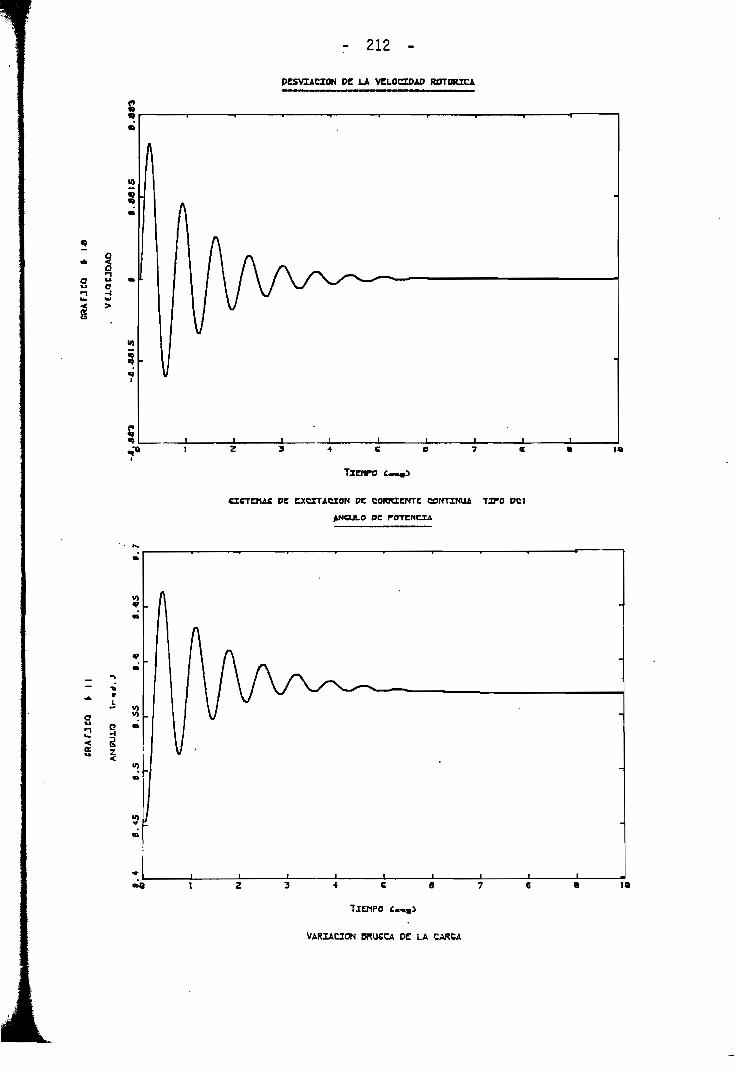
- 212 -
PCSVXACION DC LA VELOCIDAD ROTÓRICA
Ticnro
DE EXCITACIÓN DE CORRIENTE CONTINUA TITO DCIANCULO DC POTENCXA
oun
TIEMPO tm-mgí
VARIACIÓN BRUSCA DE LA CARCA

- 213 -
CONDICIONES INICIALES
TIEMPO MÍNIMO: re=o
TIEMPO MÁXIMOi T9=10
PASO DE INTEGRACIÓN H0=0.004
VARIACIÓN BRUSCA DE LA CARGA
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR DEL SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0,573657512646
I3=-0*557599370682
I5=-0,75999994397
14=1,73754768204
Tl=-0,771782098816
D=0,453643180062
C5=l,7601358019
C3=0
C4=0
U7=l,04561349049
ARCHIVO teTESIS/CARGADC2
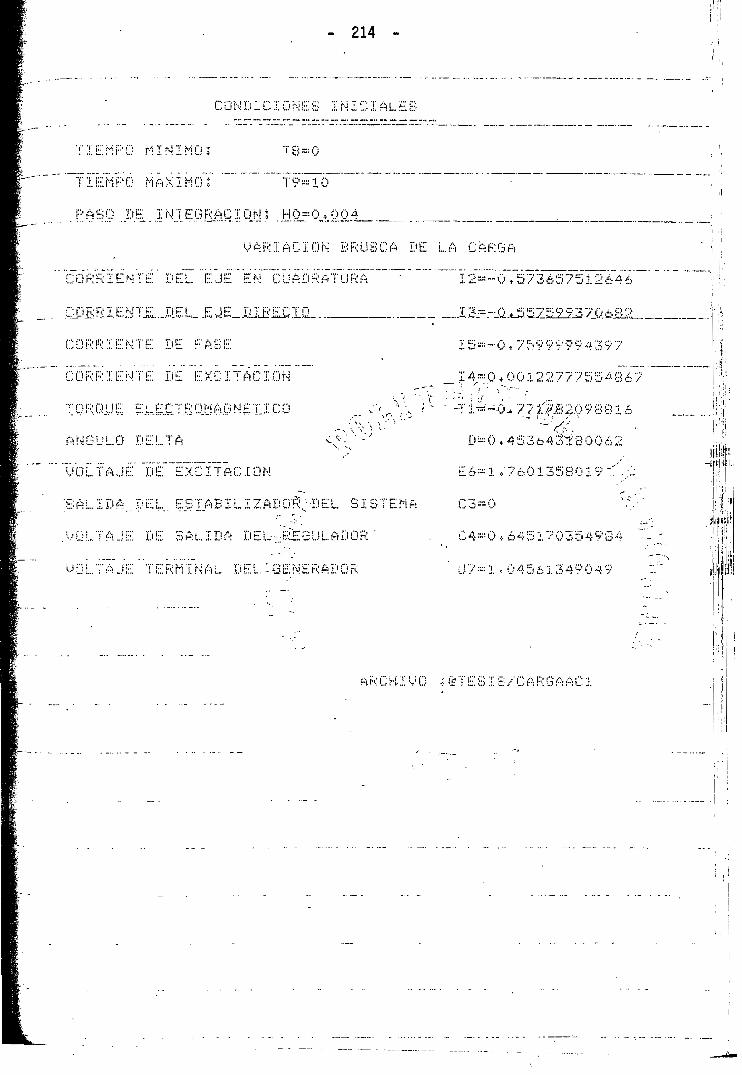
- 214 -
c o N D ::: u i o M E s T M T c i A L. E 8
TIEMPO MÁXIMO? T9=10
PASO DE INTEGRACIÓN} HO==CuOG4
MARI ACIÓN BRUSCA DE LA CARGA
CORRIENTE DEL. EJE EN CUADRATURA
Cu R RIE N TiL..DE L_ E JE_ .DJjiEC LQ
i:; Ü R RIE N T E! E! E F A S E
CORRIENTE DE EXCITACIÓN
"TuRQUE ELE.CTROHAGNE L.Ico
ÁNGULO DELTA
"VOLTAJE" TÍE"" "EXC":!: TACiQN
I2-:-0»573657512646
;S A S... ID A. D E L ES JA BILIZ A D C > R.; D E L. SIS T E H A
.VOLTAJE DE SALIDA DEL--E£SULAHÜR '
U ü L. 7 A J E " T E R h IN A i... I¡ E L -GENERA D ü R
15-»~0, 75999994397
.I4.~;0*0012277755-á867
-T Í = -ó.* 7 / 1' jS2.Q98816
D~Oo4S3643't80062
E6~l «'7601358019 ~'',;J
C4-0*645170354984
Ü7~l ,04561349049
41 '
¿lli
A K C K1V O ? ti? T E S18 / C A R G A A C1

- 215 -
CORRIENTE DEL EJE EN CUADRATURA
2 1< c£ "
'a
TIEMPO £—ai
CZCT01AC DE EXCITACIÓN DE CORRIENTE ALTERNA TITO AC1
CORRIENTE DEL EJE DIRECTO
C "«• nn e."- e< c
C
TIEMPO
VARIACIÓN BRUCCA DE LA CARCA
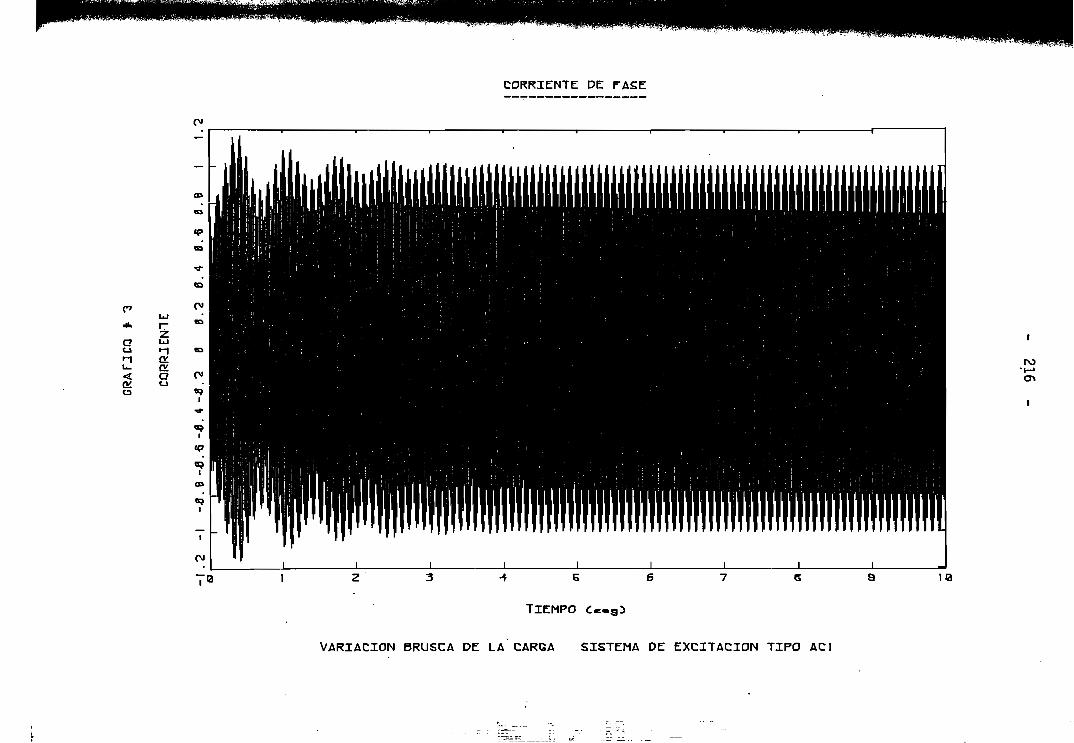
CO
RR
IEN
TE
D
E
FA
SE
O o n
ÜJ tr a. 0£ o u
ro -i-»
CT
l
VARIACIÓN
BRUSCA DE LA
CARG
A SISTEMA
DE EXCITACIÓN TIPO
AC
I

- , 2 1 7 -
CORRIENTE DE EXCITACIÓN
G«Anu.i a r»u _
Tzenro c-~a*
crcrcnu: oc EXCITACIÓN oc coraucnrc ALTCRMA TITO ACI
IICALXnENTACZON DO. VOLTAJE DE EXCITACIÓN
Snw<
TIEMPO c..a3
VARIACIÓN BRUSCA DE LA CARCA

- . 218 -
VOLTAJE DE SALIDA DEL REGULADOR
O" rn -ii_ o
Txenro c_,:>
DE EXCITACIÓN DE CORRIENTE ALTERNA Tiro ACI
VOLTAJE PC DCCTTACXON
•» 6 6
TIEMPO c»«»i
VARIACIÓN BRUSCA DE LA CARCA
IB

- -219 -
VOLTAJE TERMINAL
O <" rn -tu. c
z 3 •» c 0 7 e
licnro í—.3
CXCTETU£ OC CXCXTACXON PC COIUUENTC ALTERNA TITO AC1
TCROUC CLCC7KOMACNCTZCD
s 2
TIEMPO t«.8J
VARIACIÓN BRUSCA oc LA CARCA
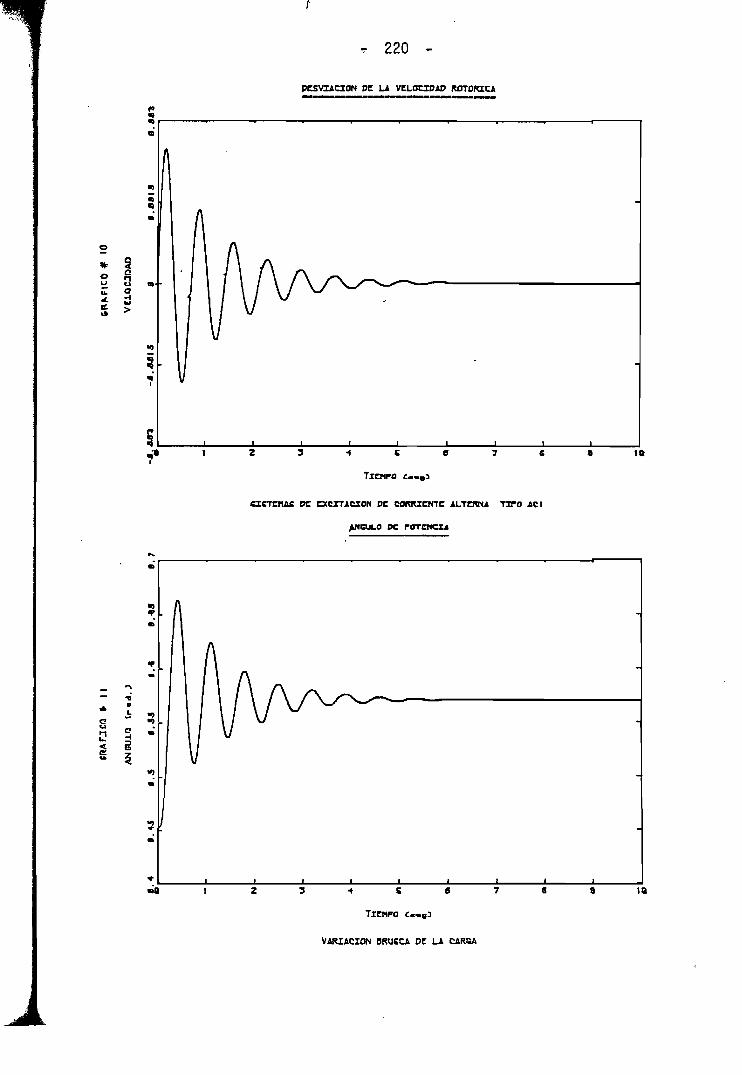
T 220 -
DESVIACIÓN DE LA VELOCIDAD ROTÓRICA
sus >
z 3 •* E
Tzcnro
CICTEn&S DC EXCITACIÓN DC CORRICNTC ALTERNA TITO ACt
ÁNGULO oc rorcnciA
•• C
TIEMPO
VARIACIÓN BRUSCA DC LA CARCA
1
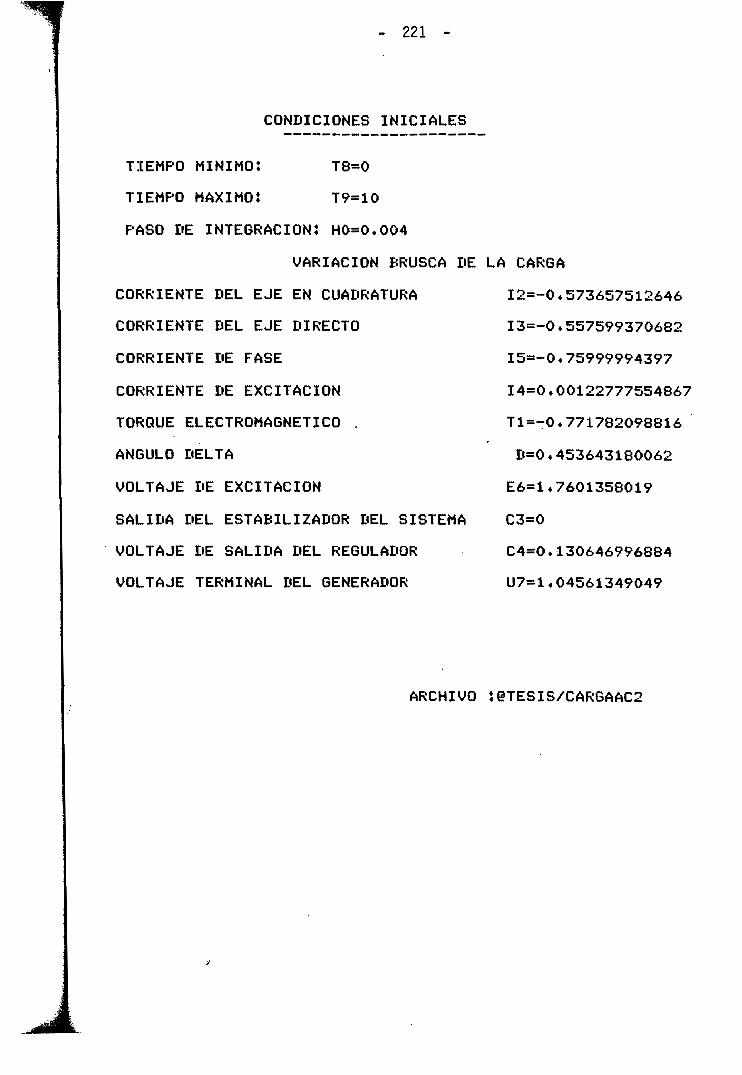
- 221 -
CONDICIONES INICIALES
TIEMPO MINIMOÍ T8=0
TIEMPO MÁXIMO: T9=ioPASO DE INTEGRACIÓN: Ho=o«oo4
VARIACIÓN BRUSCA DE
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO .
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR DEL SISTEMA
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
LA CARGA
I2=-0«573657512646
I3=-0.557599370682
I5=-0«75999994397
14=0.00122777554867
Tl=-0*771782098816
0=0*453643180062
E6=l«7601358019
C3=0
C4=0«130646996884
U7=l,04561349049
ARCHIVO :eTESIS/CARGAAC2
1

- 222 -
CORRIENTE DEL EJE EN CUADRATURA
'a z 3 -t e e 7 e
TiEnra c.,i
««TEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA Tiro ACC
COR1UCNTC DEL CJE DIRECTO
B I Z 3 4 C 6 7 6 8 10
VARIACIÓN BRUSCA DE LA CARCA

CO
RR
IEN
TE
D
E
FA
SE
dfc a (Y
UJ I— 2 uj n (E o u
ro ro co
VARIACIÓN -BRUSCA
DE L
A CA
RGA
SISTEMA
DE E
XCITACIÓN TIPO
AC2
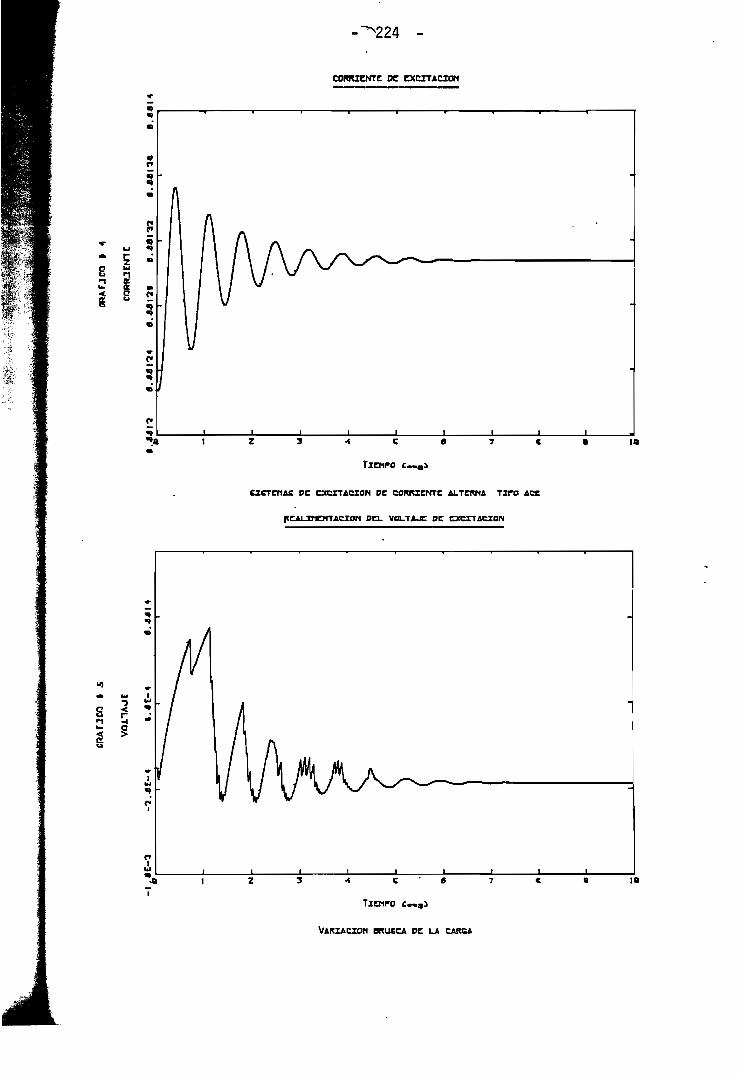
-"^224 -
CORRIENTE tX EXCITACIÓN
nI .e í
Z 3 -t 6
TIEMPO
C3CTCI1AS DC EXCITACIÓN Ot CORRIENTE ALTERNA TIPO ACE
RCALIMCnTACZON PO. VOLTAJC OC CXCZTACZON
TIEMPO c..a:>
VARIACIÓN BRUSCA PE LA CARGA
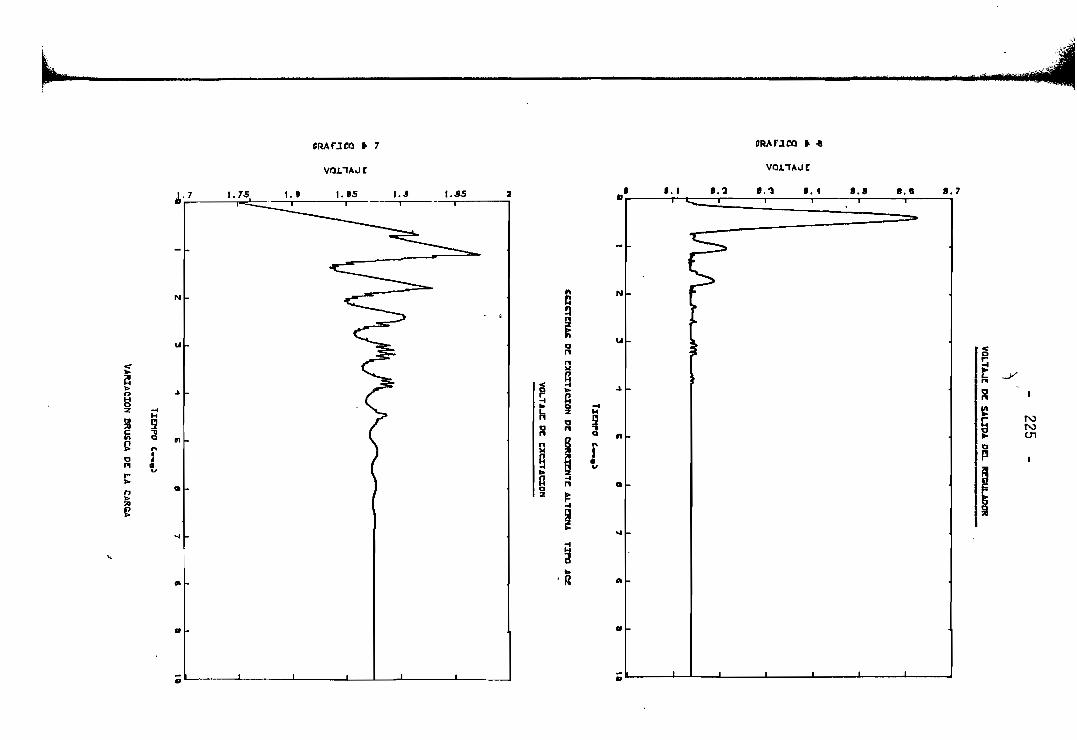
LT>
CSJ
C\
¿~e
»•«
5-9
3PV
L70
A
X i a
I •«
I
3 5 u 3i f
lü O
J
3
—1

PB
*»—
§ a
I I
> c
s á
33
"G
S
CR
ATJ
CO
t í
VO
llA
J E
i. 4
nI.
Í'IB
I.
«S
ro ro CTl
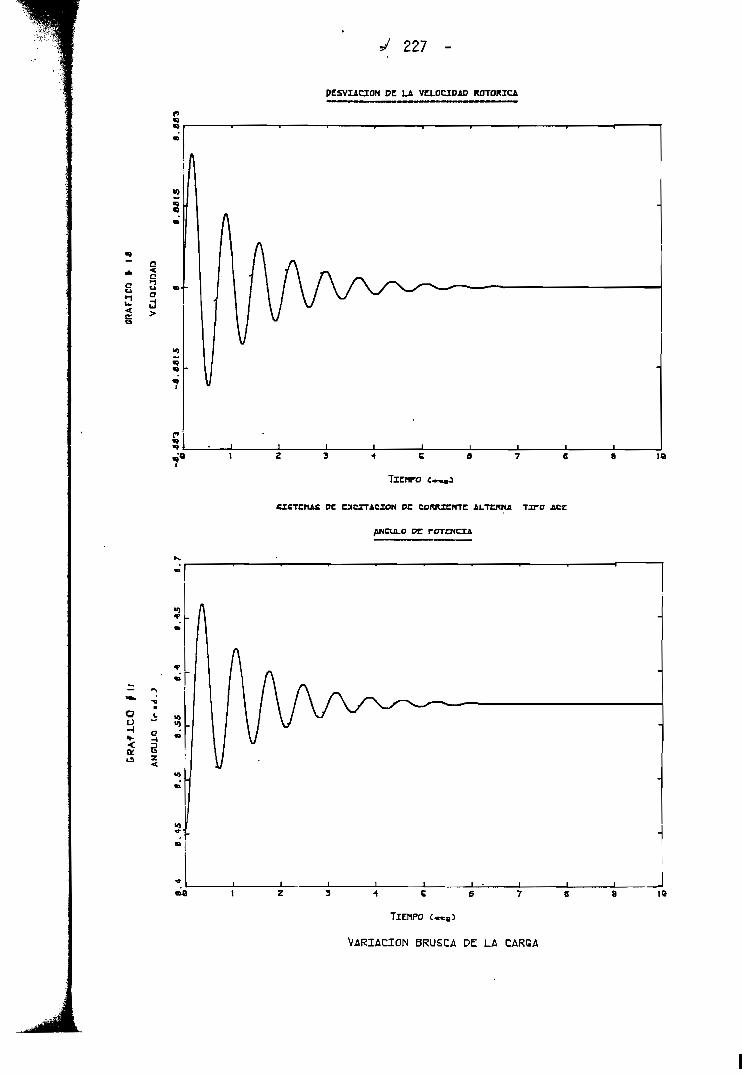
227 -
PCSVIACION DC LA VELOCIDAD ROTÓRICA
~ O- 2
CICTCnA£ PC EXCITACIÓN PC COWUCNTC ALTCKNi TITO ACZ
ÁNGULO PC rOTCNCIA
4 G 6 T
TIEMPO c««B3
VARIACIÓN BRUSCA DE LA CARGA

j- 228 -
CONDICIONES INICIALES
TIEMPO MINIMOÍ T8=0
TIEMPO MAXIMOÍ T9=10
PASO DE INTEGRACIÓN. H0=04004
CAMBIO BRUSCO DE LA CARGA
CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO
CORRIENTE DE FASE
CORRIENTE DE EXCITACIÓN
TORQUE ELECTROMAGNÉTICO
ÁNGULO DELTA
VOLTAJE DE EXCITACIÓN
SALIDA DEL ESTABILIZADOR
VOLTAJE DE SALIDA DEL REGULADOR
VOLTAJE TERMINAL DEL GENERADOR
I2=-0,573657512646
I3=-0 * 557599370682
I5=-0.75999994397
14=1*73754768204
Tl=-0*771782098816
D=0»453643180062
C5=l«7601358019
C3=0
C4=l,7601358019
U7=l.04561349049
ARCHIVO:eTEsis/CARGASTi
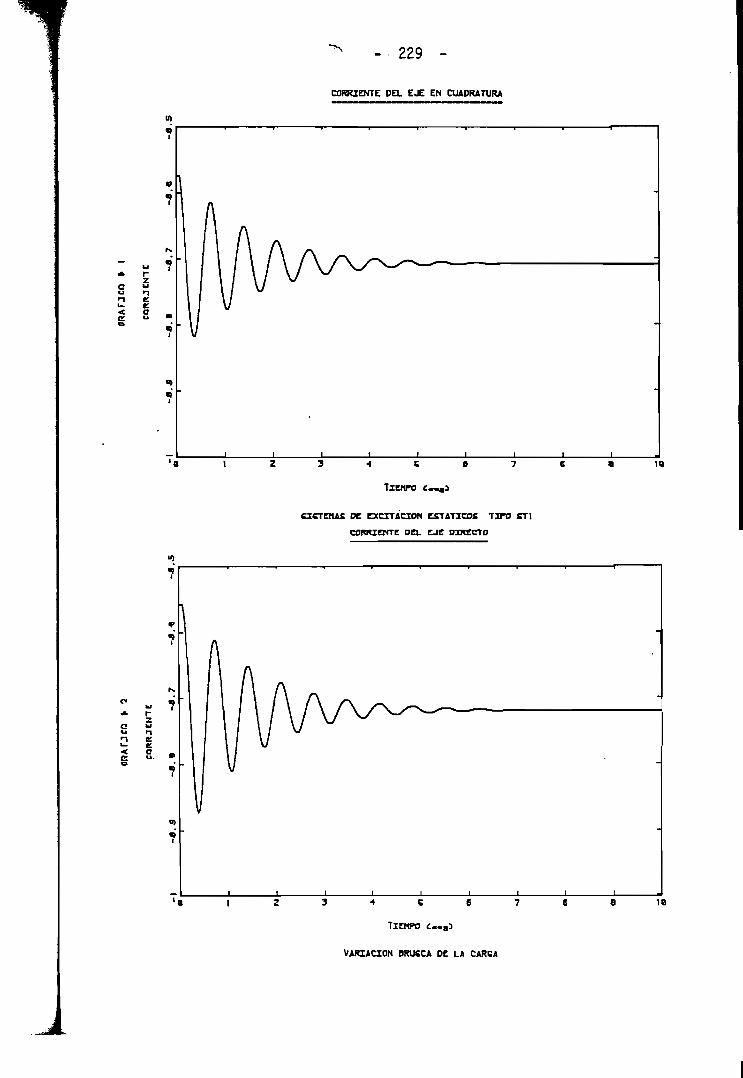
-229 -
CORRIENTE DEL EJE EN CUADRATURA
r ?z
3 •» C 0 7
TIEMPO c~B:>
CICTCIUS DE EXCITACIÓN ESTÁTICOS TIPO ST1
COfOUEMTE DEL EJE DIRECTO
n c<- e< Ge- «•
TIEMPO í..a3
VARIACIÓN BRUSCA DE LA CARCA
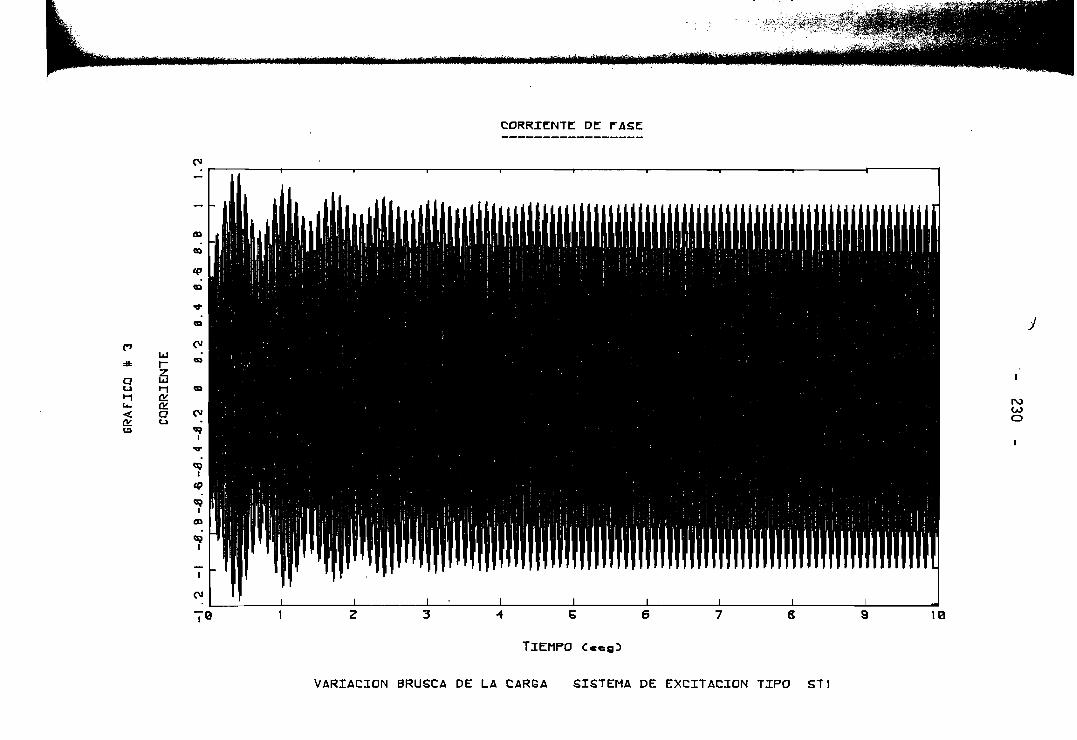
CO
RR
IEN
TE
D
E
TA
SE
=tt
Q
Oí
Oí a u
t\ CO
O
VARIACIÓN BRUSCA DE LA CARGA
SISTEMA DE EXCITACIÓN TIPO
ST1
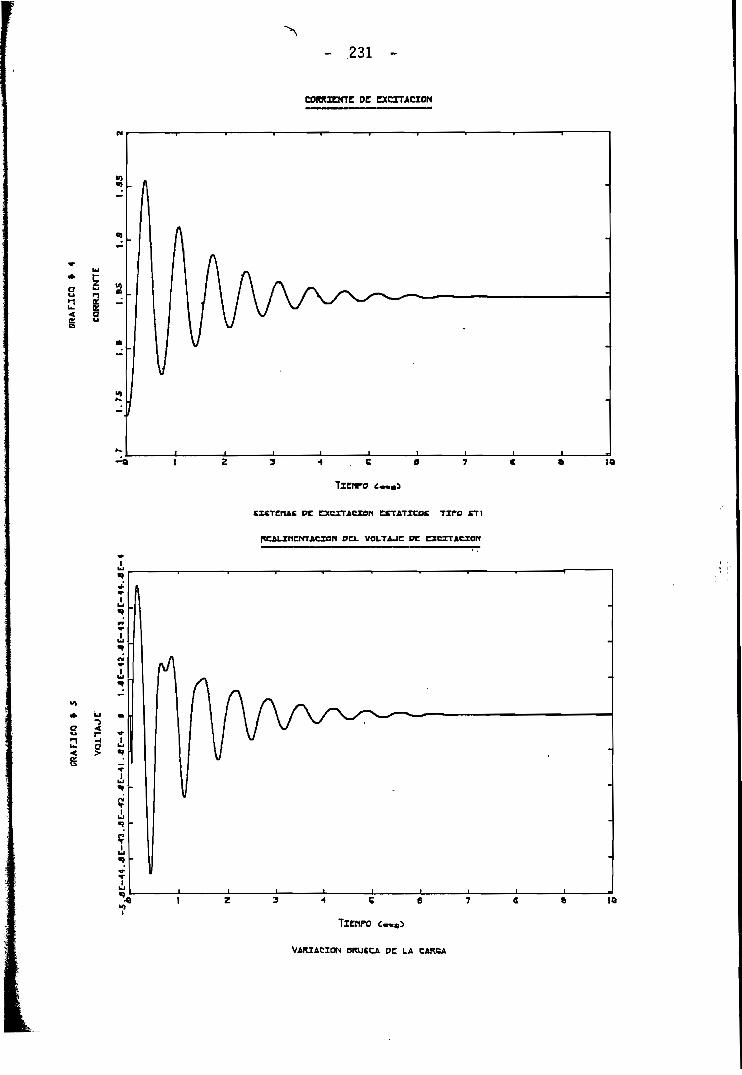
r- ,231 -
CORRXCNTC Dt «CITACIÓN
2Eg
sai
- t C « 7
Ticnro <«.aa
PC cxcrrAcxan csrÁTICOS Tiro CTI
PCI. VOLTAJE PC CXCXTACXON
VARIACIÓN BRUSCA oc LA CARCA
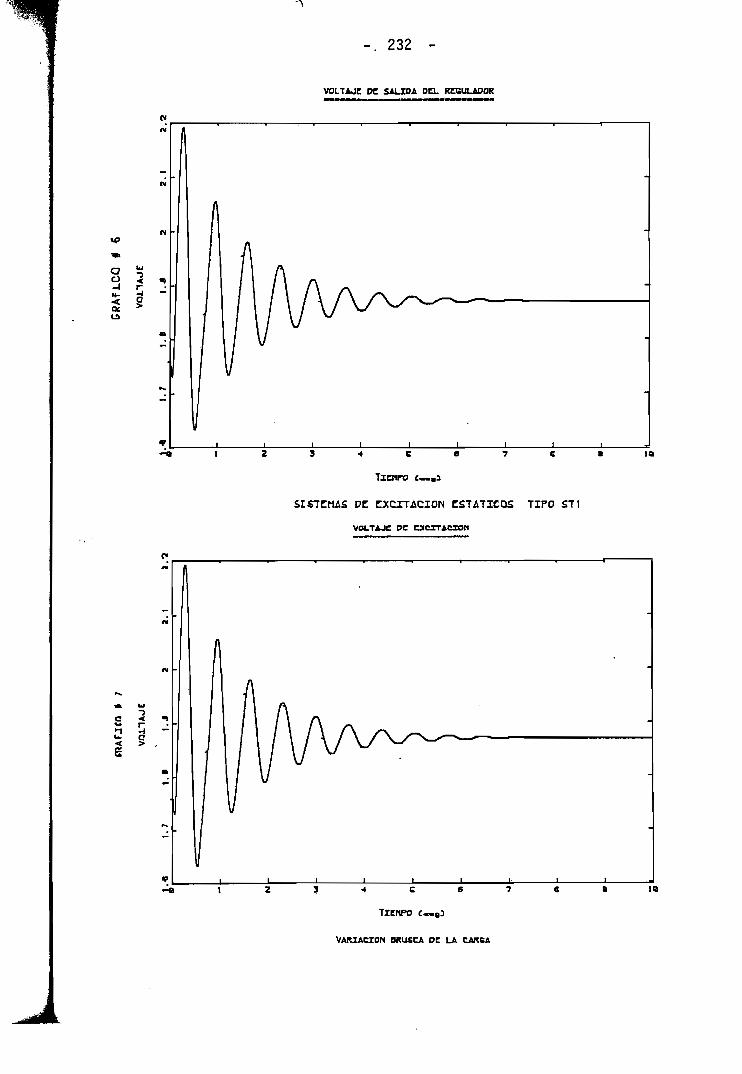
-.232 -
VOLTAJE DE SALIDA DEL REGULADOR
oow-<.Oío
u3
í
3 •« C S 7 C
Tienro c_«3
SISTEMAS DE EXCITACIÓN ESTÁTICOS TIPO ST1
VOLTAJE PC C3CTTACION
Gu
CI
TIEMPO c -03
VARIACIÓN BRUSCA oe LA CAKBA
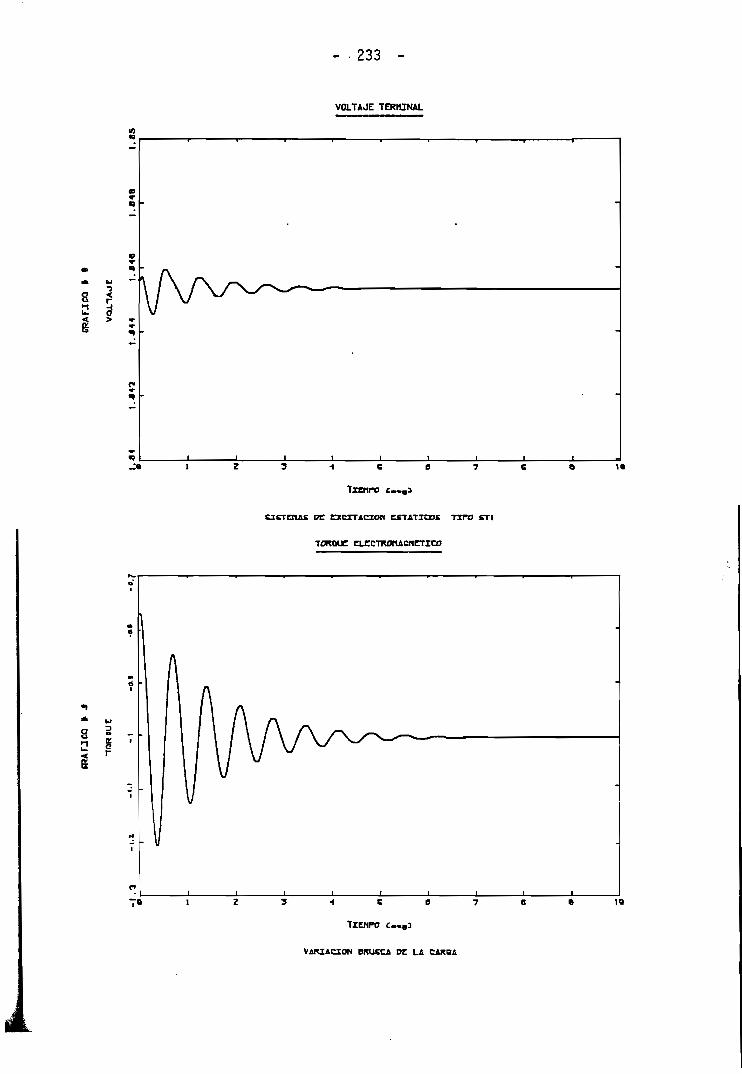
- 233 -
VOLTAJE TERMINAL
* u
s <
3 -t G O 7
Tzenro c—03
$1CTCIU£ DC DtCTTiCION ESTÁTICOS TITO £Tt
T0RDUC CLCCTROrUenCTICD
r>
7« • i c e
TIEMPO c-.e:>
VARIACIÓN BRUSCA DC LA CARBA
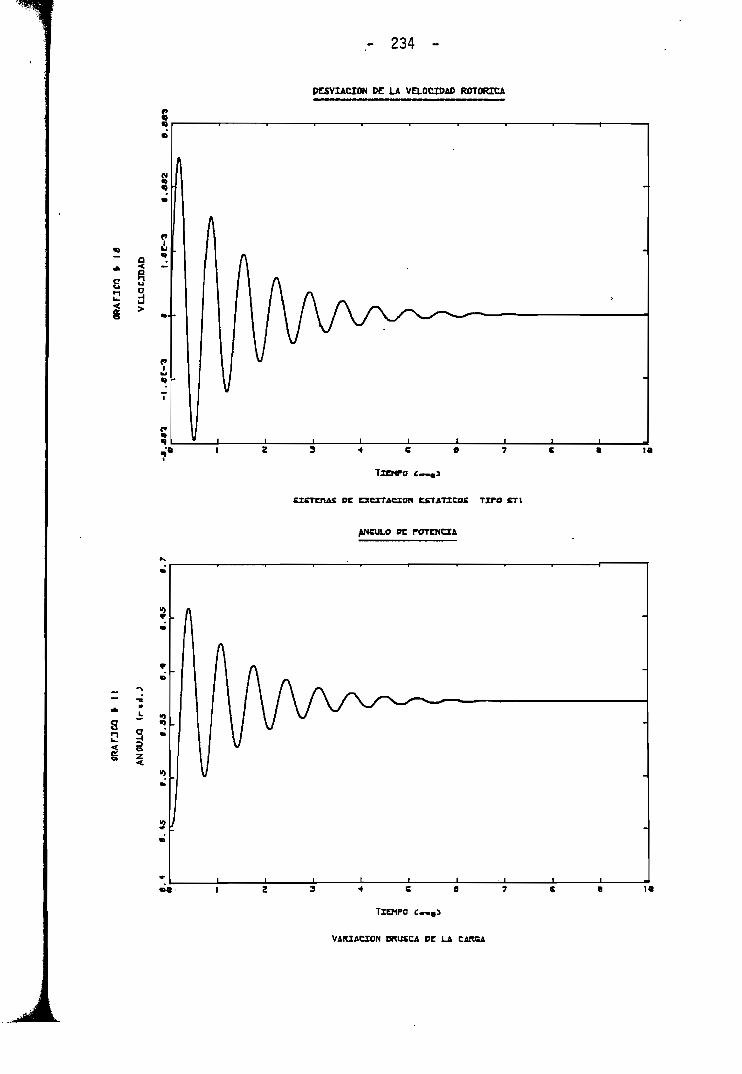
- 234 -
DESVIACIÓN DE LA VELOCIDAD ROTÓRICA
s¡ i
¿ "Js _ i
TIEMPO £—a3
CZCTCMAS DC EXCITACIÓN CSTÁTICOS TIPO CT1
ANCULO K POTENCIA
• i c e
TIEMPO c.,0j
VARIACIÓN BRUSCA DE LA CARGA

- 235 -
CONDICIONES INICIALES
TIEMPO MÍNIMO: TS=O
TIEMPO MÁXIMO: ~T9=ioPASO DE INTEGRACIÓN»: H0=0.004
CAMBIO BRUSCO DE LA CARGA
CORRIENTE DEL EJE EN CUADRATURA~ I2=-0,573657512646
CORRIENTE DEL EJE DIRECTO I3=-0,557599370682
CORRIENTE DE FASE - ; " I5=-0.75999994397
CORRIENTE DE EXCITACIÓN 14=0*00122777554867
JORQUE ELECTROMAGNÉTICO Tl=-0«771782098816
ÁNGULO DELTA D=0,453643180062
VOLTAJE DE EXCITACIÓN C5=l«7601358019
SALIDA DEL ESTABILIZADOR C3=0
VOLTAJE DE SALIDA DEL REGULADOR C4=0
VOLTAJE TERMINAL DEL GENERADOR U7=l,04561349049
ARCHIVO:@TESIS/CARGAST2
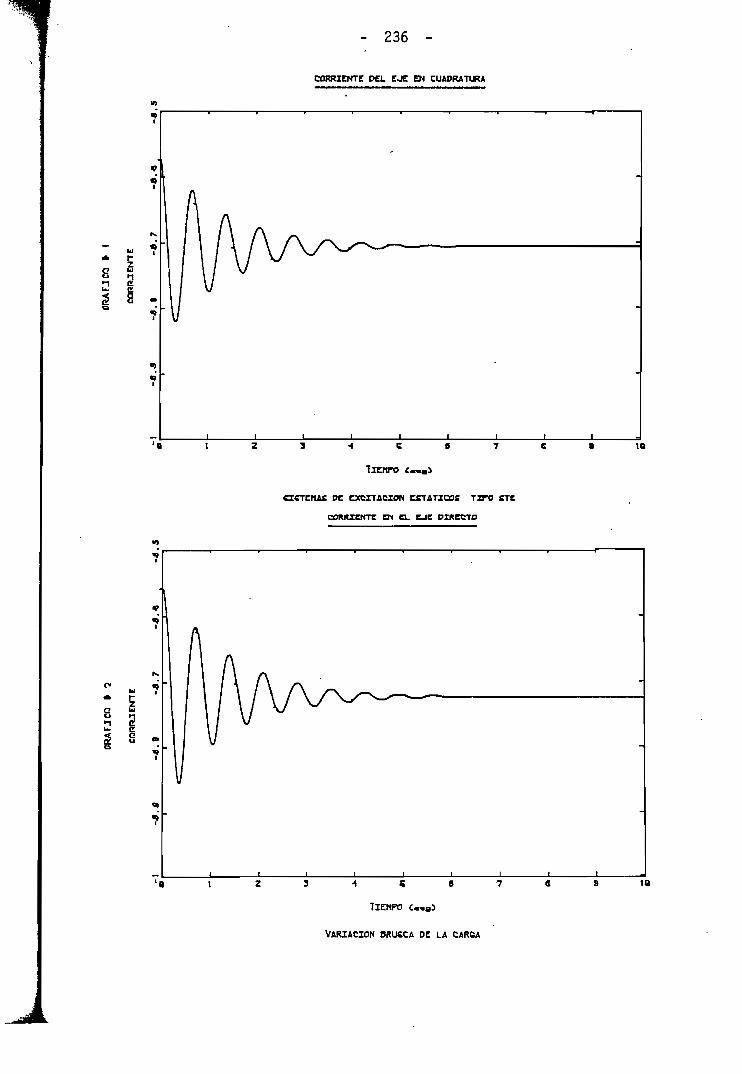
- 236 -
CORRIENTE DEL EJE EN CUADRATURA
3 -« e e 7
Tienro c~.Bi
CICTCnAS PC CXCITACION ESTÁTICOS TITO STC
CORRIENTE EN CL CJC PIRCCTO
10
TIEMPO £.«ai
VARIACIÓN BRUSCA DE LA CARCA
1
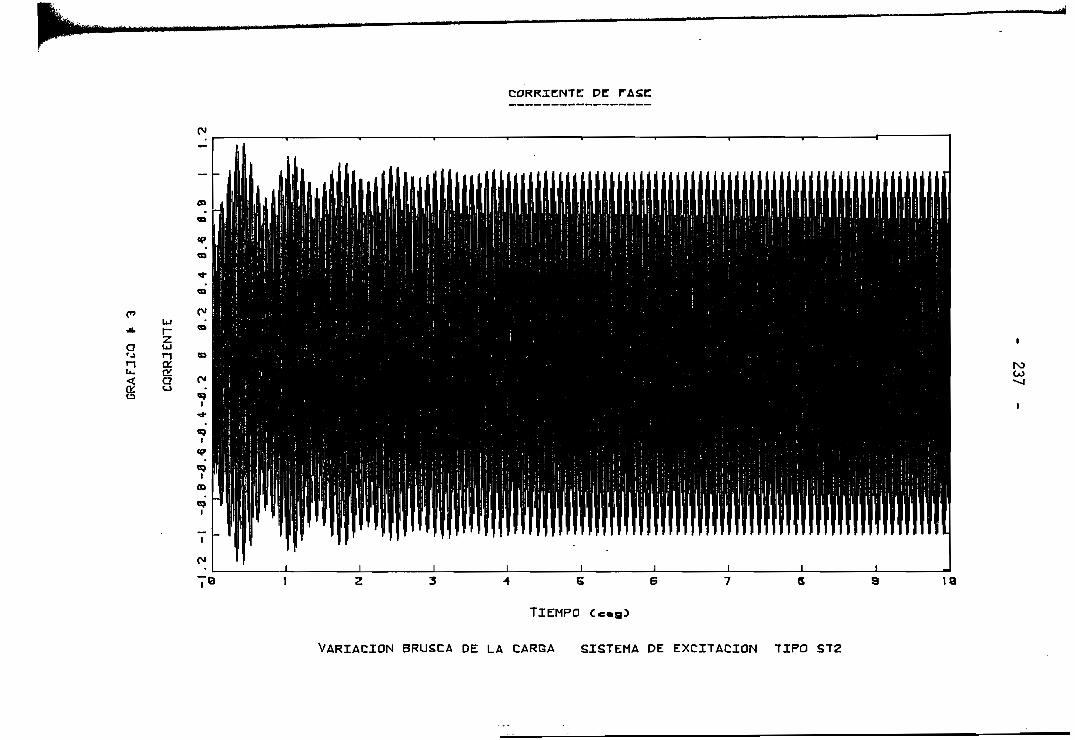
CO
RR
IEN
TE
D
E
TA
SE
o 'J l-lO
í 8 ut\ co --
J
VARIACIÓN
BRUSCA
DE LA C
ARGA
SISTEMA
DE EXCITACIÓN
TIPO ST2

- 238 -
DE EXCITACIÓN
8 .
u •)i -I E
3 4 C e 7
Tienro ¿. ^
ictcsruc DC excrrftcxoN CSTATICDS TITO ere
peu VOLTAJE DC
ta
TiEnro
VARIACIÓN BRUSCA DC LA CARCA

- 239 -
VOLTAJE DE SALIDA DEL REGULADOR
en
u2
-8
VOLTAJE DE CXCTT.ACXON
VARIACIÓN BRUSCA 0e LA CARCA

i c o
OR
AFJ
CO
fr
B
" §
p &
n
Q
O
n
8 8 i
1.4
44
1.Í
4»
ro 4^
O

- 241 -
DESVIACIÓN DE LA VELOCIDAD ROTÓRICA
CXCTCMAC PC «CITACIÓN ESTÁTICOS TITO CTZ
ANQJLO oc rorcncxA
TIEMPO c«««3
VARIACIÓN BRUSCA DE LA CARGA

- 242 -
C A P I T U L O I X
CONCLUSIONES Y RECOMENDACIONES
Al finalizar el presente estudio, cuyo objetivo fue analizar el
comportamiento de los sistemas de excitación y reguladores de voltaje
ante cambios repentinos de la carga, se llega a las siguientes conclu-
siones:
- Tomando en cuenta que el objetivo del presente trabajo no es la esta^
bilidad del sistema eléctrico de potencia, se concluye que el cam-
bio de carga influye en la estabilidad del sistema eléctrico de p£
tencia, la que también depende de los parámetros del generador, cons^
tante de inercia y además de la impedancia de la línea de transmi-
sión que está relacionada con la longitud de la misma.
- El torque electromagnético se mantiene constante cuando el rotor se
mueve a la velocidad de sincronismo. Al aumentar la carga el campo
del rotor se retrasa respecto al campo giratorio del estator, por lo
que el ángulo de potencia también varía hasta adquirir el valor nec£
sari o para crear el nuevo torque.
- Con la aplicación apropiada de los sistemas de excitación y regulado^
res de voltaje se logra mantener el voltaje generado constante ante
variaciones bruscas de la carga.
- La corriente de excitación varía ante variaciones bruscas de la , car_
ga ya que varía el voltaje terminal, pues en estudios anteriores es.

1. - 243 -
ta corriente se suponía constante lo cual no era una suposición real
en cuanto al funcionamiento del sistema de potencia.
- La ganancia KA y la constante de tiempo T/\l regulador de voltaje
tienen su influencia en la velocidad de respuesta de los distintos
tipos de sistemas de excitación, pues depende del valor que tomen es_
tos parámetros para simular el regulador correspondiente a cada tipo
de sistema.
- La constante de tiempo T£ del excitador influye en la velocidad de
respuesta del sistema de excitación de corriente continua debido a
la gran inductancia que tiene el bobinado de campo de estos siste-
mas.
- Los sistemas de excitación estáticos son los que poseen una alta v£
locidad de respuesta seguidos por los sistemas de excitación de c£
rriente alterna y continua.
- Para obtener una respuesta real de los distintos tipos de sistemas
de excitación es necesario que los parámetros que modelan los excita^
dores y reguladores de voltaje sean apropiados dependiendo del equi_
po del sistema de excitación que se esté simulando.
De las conclusiones expuestas anteriormente son necesarias las
siguientes recomendaciones:
Tomando^ en cuenta que para el estudio del presente trabajo fue
necesario recurrir a varios medios de información para obtener los pará_
1- 244 -
metros que representan los distintos sistemas de excitación se recomí en
da estudiar métodos analíticos, por ejemplo, estabilidad en el dominio
de la frecuencia, para especificar los parámetros y analizar la respues^
ta del sistema de excitación.
De los ejemplos corridos en el computador se toma como paso de
integración un valor de 0.004 seg. por las razones expuestas en el Capj[
tulo VII, pero también es necesario tomar en cuenta que el paso de inte^
gración debe ser menor que la menor constante de tiempo, pues como el
proceso de integración es iterativo se acumulan errores que pueden cam
biar la respuesta del sistema simulado.
Se recomienda también que se siga el estudio de los sistemas de
excitación en cuanto se refiere a la estabilidad del sistema de pote£
cia.
Además es conveniente se realice el diseño del estabilizador del
sistema de potencia operando a través del control de excitación basado
en el microprocesador.
Tomando en cuenta que la máquina impulsora desempeña un papel im
portante en el funcionamiento del generador, es necesario que se compl£
mente el estudio con el gobernor de velocidad de esta máquina.
Es necesario anotar que el presente trabajo, a diferencia de
bajos anteriores, servirá como documento de referencia para el usuario,
pues se tiene a mano programas que modelan el generador y los distintos
tipos de sistemas de excitación con sus respectivos archivos de paránre

- 245 -
tros y de datos, lo que facilita la utilización en el ingreso de condi_
ciones de funcionamiento y obtención de resultados gráficos, los que se
obtienen en forma continua.
£ákak¿£ÍáL:

1
A P É N D I C E A
LISTADO DEL PROGRAMA

APÉNDICE -A- PAG» 1
H8=-l60 TO 41060 TO 620
\i GO TO 6601¡ 89=1[8 60 TO 333010 S9=2 . •¿2 GO TO 3370S9=3
26 GO TO 341028 S9=4JO GO TO 3450100 REM PROGRAMA: -TESIS-110 REM ESCUELA POLITÉCNICA NACIONAL¡20 REM130 REM FACULTAD DE INGENIERÍA ELÉCTRICA140 REM150 REM TESIS PREVIA A LA OBTENCIÓN DEL160 REM TITULO DE INGENIERO EN170 REM ELECTRÓNICA Y CONTROL180 REM190 REM TEMA í ESTUDIO DE LOS SISTEMAS DE EXCITACIÓN200 REM Y REGULADORES DE VOLTAJE DE LAS210 REM MAQUINAS SINCRÓNICAS220 REM230 REM AUTOR: PABLO ROBINSOÑ RIVERA ARGOTI240 REM250 REM DIRECTOR: ins. MILTON TOAPANTA"260 REM70 REM JULIO DE 1985
280 REM290 REM OBJETIVO: EL OBJETIVO QUE SE PERSIGUE EN EL PRESENTE00 REM TRABAJO ES ANALIZAR EL COMPORTAMIENTO DE10 REM LOS SISTEMAS DE EXCITACIÓN CON SUS REGULA-20 REM DORES DE VOLTAJE ANTE CAMBIOS REPENTINOS30 REM DE LA CARGA»EN OTRAS PALABRAS SU VELOCIDAD40 REM DE RESPUESTA»PARA LO CUAL SE SIMULARA LA50 REM MAQUINA SINCRÓNICA COMPLETA»EL SISTEMA DE60 REM EXCITACIÓN CON SU REGULADOR DE VOLTAJE Y70 REM UNA LINEA DE TRANSMISIÓN CORTA»LA CUAL ESTA80 REM ACOPLADA A LA BARRA INFINITA»90 REM00 PAGE10 REM SELECCIÓN DE LA UNIDAD DONDE ESTA EL DISCO420 GOSUB 44030 GO TO 530
IF H80-1 THEN 510PRINT "J UNIDAD DONDE ESTA EL DISKETTE? (O o DGG1»INPUT H8
470 IF H8=0 OR H8=l THEN 490480 60 TO 45090 CALL 'UNIT'»H800 CALL *MOUNT'»H8»X*10 RETURN
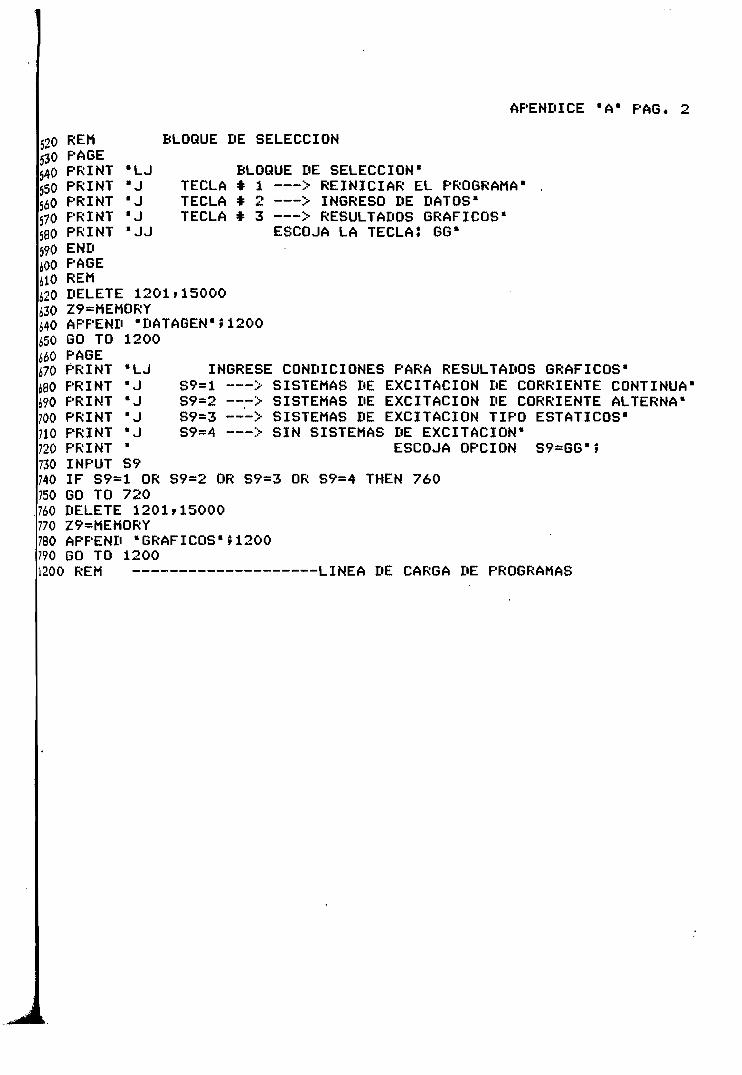
APÉNDICE 'A' PAG. 2
BLOQUE DE SELECCIÓN5-70 REM530 PAGE540 PRINT 'LJ550 PRINT 'J560 PRINT 'J570 PRINT "J580 PRINT 'JJ590 END¿00 PAGE410 REM¿00 DELETE 1201*15000¿30 Z9=MEMORY¿40 APPEND 'DATAGEN'Í1200¿50 GO TO 1200660 PAGE
•LJ•J
BLOQUE DE SELECCIÓN'TECLA * 1 > REINICIAR EL PROGRAMA'TECLA * 2 > INGRESO DE DATOS'TECLA * 3 > RESULTADOS GRÁFICOS'
ESCOJA LA TECLAÍ GG'
•J•J'J
INGRESE CONDICIONES PARA RESULTADOS GRÁFICOS'S9=l > SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA'S9=2 > SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA'S9=3 > SISTEMAS DE EXCITACIÓN TIPO ESTÁTICOS'S9=4 > SIN SISTEMAS DE EXCITACIÓN'
ESCOJA OPCIÓN S9=GG'Í
¿70 PRINT¿80 PRINT¿90 PRINT700 PRINT710 PRINT720 PRINT730 INPUT S9740 IF S9=l OR S9=2 OR S9=3 OR S9=4 THEN 760750 60 TO 720760 DELETE 1201*15000770 Z9=MEMORY780 APPEND 'GRÁFICOS' 11200790 GO TO 12001200 REM LINEA DE CARGA DE PROGRAMAS
1
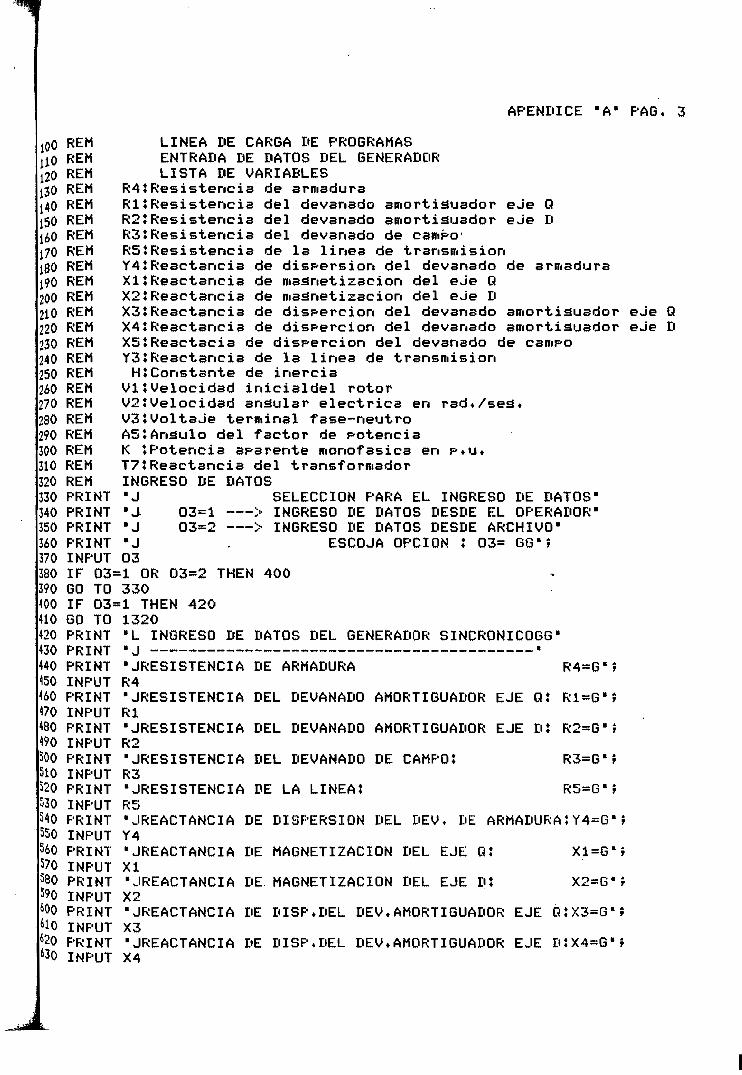
100 REM,10 REM120130140 REM150 REM160 REM170 REM180 REM190 REM200 REM210 REM220 REM230 REM240 REM250 REM260 REM270 REM280 REM290 REM300 REM310 REM320 REM330 PRINT340 PRINT350 PRINT360 PRINT
INPUTIF 03=
TOIF 03=
410 GO TO420 PRINT430 PRINT440 PRINT
INPUT460 PRINT470 INPUT480 PRINT490 INPUT500 PRINT
INPUT520 PRINT530 INPUT540 PRINT
INPUT560 PRINT570 INPUT580 PRINT
INPUTPRINTINPUT
'20 PRINTINPUT
APÉNDICE 'A' PAG, 3
LINEA DE CARGA DE PROGRAMASENTRADA DE DATOS DEL GENERADOR-LISTA DE VARIABLES
R4ÍResistencia de armaduraRl«Resistencia del devanado amortiguador eJe QR2«Resistencia del devanado amortiguador eJe DR3«Resistencia del devanado de campo'R5«Resistencia de la linea de transmisiónY4«Reactanci3 de dispersión del devanado de armaduraXI«Reactancia de magnetización del eJe QX2«Reactancia de magnetización del eJe DX3«Reactancia de dispercion del devanado amortiguador eJe QX4»Reactancia de dispercion del devanado amortiguador eJe DXS'Reactacia de dispercion del devanado de campoY3«Reactancia de la linea de transmisiónHíConstante de inercia
VI«Velocidad inicialdel rotorV2«Velocidad angular eléctrica en rad./seg.V3«Voltaje terminal fase-neutroASÍ Ángulo del factor de potenciaK «Potencia aparente monofásica en p«u.T7«Reactancia del transformadorINGRESO DE DATOS
SELECCIÓN PARA EL INGRESO DE DATOS103=1 > INGRESO DE DATOS DESDE EL OPERADOR103=2 > INGRESO DE DATOS DESDE ARCHIVO»
ESCOJA OPCIÓN J 03= GG'Í370380390 GO400
6<>0
•J•J•J•J03'1 OR 03=2 THEN 400330'1 THEN 4201320•L INGRESO DE DATOS DEL GENERADOR SINCRONICOGG'• I __„_»___«« . ^ ^ ....«..«.«««..«.. . ._„_.___.,_._._.._.__._„_.._..„„. •
•JRESISTENCIA DE ARMADURAR4•JRESISTENCIA DEL DEVANADO AMORTIGUADOR EJE Q: R1=G"ÍRl•JRESISTENCIA DEL DEVANADO AMORTIGUADOR EJE Di R2=G'ÍR2•JRESISTENCIA DEL DEVANADO DE CAMPO, R3=G'ÍR3•JRESISTENCIA DE LA LINEAJ R5=G'ÍR5•JREACTANCIA DE DISPERSIÓN DEL DEV. DE ARMADURAíY4=G'fY4•JREACTANCIA DE MAGNETIZACIÓN DEL EJE Q: Xl=G'rXI•JREACTANCIA DE. MAGNETIZACIÓN DEL EJE Dí X2=G'ÍX2•JREACTANCIA DE DISP,DEL DEV,AMORTIGUADOR EJE QÍX3=G'ÍX3•JREACTANCIA DE DISP.DEL DEV.AMORTIGUADOR EJE D:X4=G'ÍX4
A

APÉNDICE 'A' PAG« 4
,40 PRINT 'JREACTANCIA DE DISPERSIÓN DEL DEV, DE CAMPO: X5=G'Í¡50 INPUT X5¿60 PRINT ' JREACTANCIA DE LA LINEA: Y3=G'Í¿70 INPUT Y3¡80 PRINT • JREACTANCIA DEL TRANSFORMADOR T7=G« í¡90 INPUT T7700 PRINT 'JCONSTANTE DE INERCIA DE LA MAQUINA! H=G'Í710 INPUT H720 PRINT 'JJ LOS DATOS ESTÁN BIEN INGRESADOS (Si o No) GGfi730 INPUT B*740 IF B*='SI' OR B*='S« THEN 760750 60 TO 420760 PAGE770 PRINT -JVELOCIDAD INICIAL DEL ROTOR: V1=G' í780 INPUT VI790 PRINT -JCONCATENACIONES DE FLUJO MUTUO CRITICO F9=G'Í800 INPUT F9810 PRINT "JINGRESE COEFICIENTES DE LA CURVA DE VACIOGG"820 PRINT "J P1=G'Í830 INPUT Pl840 PRINT "J P2=G'Í850 INPUT P2860 PRINT "J P3=G"f870 INPUT P3880 PRINT "J P4=G'Í890 INPUT P4900 PRINT 'J P5=G'Í910 INPUT P5920 PRINT 'J P6=G'Í930 INPUT P6940 PRINT "J P7=G'Í950 INPUT P7960 PRINT 'J P8=G'»970 INPUT P8980 PRINT ' JVELOCIDAD ANGULAR ELÉCTRICA EN rsd./seá, V2=G'J990 INPUT V21000 PRINT -JVOLTAJE TERMINAL FASE-NEUTRO V3=G'Í1010 INPUT V31020 PRINT "JANGULO DEL FACTOR DE POTENCIA EN rsd, A5=G'Í1030 INPUT A51040 PRINT "JPOTENCIA APARENTE MONOFÁSICA EN p.u. K=G'Í1050 INPUT K1060 PRINT 'JJ LOS DATOS ESTÁN BIEN INGRESADOS (Si o No)GG"í1070 INPUT Bt'080 IF B*=»SI" OR B*='S' THEN 11001090 GO TO 77011 00 PAGEUO REM ESCRITURA DE DATOS EN ARCHIVO[120 PRINT "JJ NOMBRE DEL ARCHIVO DE DATOS:GG'Í1130 INPUT D*140 D*=«GTESIS/'XD$
CALL 'FILE'»H8rD*,X*IF X*=" THEN 1220
ll?0 PRINT 'J YA EXISTE EL ARCHIVO

APÉNDICE 'A' PAG. 5
118011901200121012201230124012501260127012801290130013101320133013401350136013701380139014001410142014301440145014601470148014901500151015201530154015501560157015801590160016101620163016401650166016701680169017001710
PRINT 'J DESEA DESTRUIR SU CONTENIDO? (Si o No)ÍGG'íINPUT X*IF X*="NO' OR X$='N' THEN 1120KILL D*CRÉATE D*Í300,0PAGEPRINT "JJ NOMBRE DEL ARCHIVO DE DATOSÍ'ÍD*OPEN D*íl,'U',X*CALL 'WRITEWRITECLOSEGO TOENDPRINTINPUT
REWIND'»!*i:R4fRl>R2rR3,R5fY4fXlfX2,X3,X4»X5fY3fT7*i:H»Vl»F9,Pl,P2»P3,P4,P5,P6,P7,P8fV2,V3»A5»K11430
•JD*
INGRESE EL NOMBRE DEL ARCHIVO DE DATOS : GG'Í
D*="eTESIS/"ÍD*CALL 'FILE'>H8»D*»X*IF X*=" THEN 1390GO TO 1430ENDPRINT "J INGRESE BIEN EL NOMBRE DEL ARCHIVO GG'GO TO 1320REM SUBRUTINA DE GRABACIÓN E IMPRESIÓN DE DATOS
D*?lt"R'»X$*i:R4»Rl,R2»R3»R5»Y4,Xl»X2»X3fX4»X5,Y3»T7*1:H»V1» F9»Pl»P2»P31P4 » P5 » P6>P7 > P8»V2 » V3 r A5 » K
INGRESE CONDICIONES DE FUNCIONAMIENTOGG'S2=o > GENERADOR MODELO NO SATURADO'32=1 > GENERADOR MODELO SATURADO'
ESCOJA OPCIÓN S2 = GG'Í
•LJ•J•J•JJS2
OPENREADREADPRINTPRINTPRINTPRINTINPUTIF S2=0 ORGO TO 1460PRINTPRINTPRINTPRINTINPUTIF P0=l ORGO TO 1530PAGEIF POREMREMREMPRINTINPUTPRINTINPUTCLOSEPAGEREM
"J•J•J•JJPO
S2=l THEN 1530
INGRESE PERTURBACIONES GG'p0=l > INCREMENTO BRUSCO DE LA CARGA'p0=2 > ESTADO ESTABLE"
ESCOJA OPCIÓN PO = GG'J
P0=2 THEN 1600
2 THEN 1690
' JTO'JAO1
INGRESE INICIO DE LA PERTURBACIÓN T0= GG'Í
ÁNGULO ELÉCTRICO INICIAL DE LA PERTURBACIÓN AO=GG'Í
Impresión de Datos

APÉNDICE 'A' PAG. ó
J720730740
1750760|7701780790
|BOO18108201830[8408508608708808900010203040
9509607080900010203040
05036057008009010010
120130140150160170180190¡00¡10¡20!30
!SO
OR Y*="S" THEN 1760
'J ALISTE EL IMPRESOR (Pulse RETURN F-STS continuar >GG'X*1810
PRINT 'LJ DESEA IMPRESIÓN EN PAPEL (Si o No)?GGINPUT Y$IF YÍ-='SI"GO TO 1800Y=51PRINTINPUTGO TOY —TOI — \J tL.
CALLPRINTPRINTPRINTPRINTPRINTPRINTPRINT
1 TIME"FTíGY;
GY JJJ PARÁMETROS DE
Fecha : 'ARCHIVO:•
LA MAQUINA
ÍT*
SINCRÓNICA
GY:'J1940
GY:GY:GY:'
IF S2=0 THENGO TO 1930PRINTGO TOPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPAGEREMREM
Valores en p.u. "ACCIÓN GENERADORA1
1910
MODELO NO SATURADO"
GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:GY:
'J'JResistencia' JResistencia"JResistencia' JResistencia
MODELO SATURADOde Armaduradel devanadodel devanadodel devanado
amortiguador eJe Qamortiguador eJe Dde campo
JResist.de la linea de transmisiónJReactancia de dispersión del dev.de armadura
de magnetización del eJe Qmagnetización del eJe Ddel dev. amortiguador eJe Qdel dev. amortiguador eJe Ddel devanado de campo
la linea de transmisióntransformador
JReactanciaJReactancia deJReact.de disp,JReact.de disp.JReact.de disp,JReactancia deJReactancia del' JConstante de inercia en segundos'JVelocidad inicial del rotor' JVelocidad anáular eléctrica en rad'JVoltaJe terminal fase-neutro'JAn2ulo del factor de potencia"JPotencia aparente monofásica
R4="Rl='R2='R3='R5='Y4='Xl = 'X2='X3='X4='X5='Y3='T7='H='
ÍR1ÍR2IR3»R5ÍY41X1ÍX2ÍX3
5X5»Y3ÍT7»HÍV1
/seáV3=A5=K='' »A5ÍK
SELECCIÓNPRINTPRINTPRINTPRINTPRINTPRINTENDDELETE
JGGDEL TIPO DE SISTEMA DE EXCITACIÓN
ESCOJA EL SISTEMA DE EXCITACIÓN
"J•J•J•J
TECLATECLATECLATECLA
4 > SISTEMA DE EXCITACIÓN DE CONTINUA15 > SISTEMA DE EXCITACIÓN DE ALTERNA'ó > SISTEMA DE EXCITACIÓN ESTÁTICO'7 > SIN SISTEMA DE EXCITACIÓN'
1201» 2220Z9=MEMORYAPPEND 'SISTDC'»2380
APÉNDICE 'A1 PAG» 7
22óO GO TO 2380?270 DELETE 1201r2260??80 Z9=MEMORY2290 APPEND "SISTAC"»23802300 GO TO 23802310 DELETE 1201»23002320 Z9=MEMORY2330 APPEND «SISTST1í23802340 GO TO 23802350 DELETE 1201*23402360 Z9=MEMORY2370 APPEND "SINEXI•í23802380 REM LINEA DE CARGA DE PROGRAMAS
1

APÉNDICE "A" PAG. 8
100 REM SISTEMA DE EXCITACIÓN TIPO DC 'SISTDC1110 REM PROGRAMA QUE REALIZA LA SIMULACIÓN DE LOS120 REM SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA130 REM INCLUIDO EL GENERADOR SINCRÓNICO EL MISMO QUE140 REM ESTA ACOPLADO A UN SISTEMA LINEA DE TRANSMISIÓN150 REM BARRA INFINITA.160 REM!70 REM EN ESTE PROGRAMA SE SIMULAN LOS SISTEMAS DE180 REM EXCITACIÓN TIPO DC1 Y DC2 SEGÚN EL IEEE.190 REM200 PRINT *LJ PARÁMETROS DE LOS SISTEMAS DE EXITACION"210 PRINT 'J TIEMPO MÍNIMO Í T8=G'í220 INPUT T8230 PRINT 'J TIEMPO MÁXIMO». T9=G'J240 INPUT T9250 PRINT "JPASO DE INTEGRACIÓN HO=G'Í260 INPUT HO270 PRINT "JVOLTAJE DE EXCITACIÓN A 0.75 DEL MÁXIMO E4=G'»280 INPUT E4290 PRINT 'JVOLTAJE DE EXITACIQN MÁXIMO E5=G"í300 INPUT ES310 PRINT 'JJJINGRESE CONSTANTES DEL SISTEMA DE EXCITACIONGG*320 REM330 PRINT 'JCONSTANTE DE TIEMPO DEL EXCITADOR J1=G«Í340 INPUT Jl350 PRINT "JCONST. DE TIEMPO DEL ESTABILIZADOR DEL SISTEMA J2=G'í360 INPUT J2370 PRINT "JCONSTANTE DE TIEMPO DEL REGULADOR DE VOLTAJE J4=G'Í380 INPUT J4390 PRINT "JGANANCIA DEL ESTABILIZADOR DEL EXCITADOR K3=G'Í400 INPUT K3410 PRINT 'JGANANCIA DEL REGULADOR DE VOLTAJE K5=G'Í420 INPUT K5430 PRINT "JINGRESE COEFICIENTES DE LA CURVA DE SATURACIÓN S4=G'Í440 INPUT S4450 PRINT "J S5=G'Í460 INPUT S5470 PRINT 'JVOLTAJE MÍNIMO DEL REGULADOR UO=G"Í480 INPUT UO490 PRINT 'JVOLTAJE MÁXIMO DEL REGULADOR U1=G'Í500 INPUT Ul510 PRINT BYt'LJ SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA'520 REM SELECCIÓN DEL SISTEMA DE EXCITACIÓN TIPO DC530 PRINT "LJ SELECCIONE EL SISTEMA DE EXCITACIÓN TIPO DCGG'540 PRINT 'J S0=l SISTEMA TIPO DC1"550 PRINT "J S0=2 SISTEMA TIPO DC2"560 PRINT "JJJ ESCOJA OPCIÓN SO=G"»570 INPUT SO580 IF S0=l OR S0=2 THEN 600590 GO TO 520600 IF S0=l THEN 6400 PRINT eYí'J PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO DC2"
620 PRINT eYf "630 GO TO 660

APÉNDICE 'A ' PAG. 9
.. fifi».
¿40650660670680690700710720730740750760770780790800810820830840850860870880890900910920930940950960970980990100010101020103010401050106010701080109011001110112011301140USO11601170
PRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTREMPRINTGOSUBPRINTPRINTPRINTPRINTPRINT
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO DC1 •BY i ' Jrav* • ———————————_——-.—.——.-.———.______________
BYfJVOLTAJE DE EXCITACIÓN A 0.75 DEL MÁXIMOBYfJVOLTAJE DE EXCITACIÓN MÁXIMO6Yi'JCONSTANTE DE TIEMPO DEL EXCITADOR
JCONSTANTE DE TIEMPO DEL ESTABILIZADOR•JCONSTANTE DE TIEMPO DEL REGULADORJGANANCIA DEL ESTABILIZADOR
BYI'JVOLTAJE MÍNIMO DEL REGULADORBYt'JVOLTAJE MÁXIMO DEL REGULADOR
CALCULAR CONDICIONES INICIALES
ev:@ Y Jev:
E4="ÍE4E5='ÍE5J1='ÍJ1J2='ÍJ2J4='*J4K3='ÍK3U0='íUO
•J2450
SE ESTA CALCULANDO CONDICIONES INICIALES'
CONDICIONES INICIALES 1
BYt'JBYÍ'J
IF P0=2 THENPRINT BYt'J
860BYÍ'JBYÍ'JJJBYÍ'J
TIEMPO MÍNIMO:TIEMPO MAXIMOÍPASO DE INTEGRACIÓN
T8=t»T8T9='ÍT9HO=«ÍHO
850
60 TOPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTDELETEDIM V(li:V(1)=F1V(2)=F2V(3)=F3
V(5)=F5
I2='fI2
§YÍ6YÍB Y J ' J
•J•J
SYV
•J•J•J
VARIACIÓN BRUSCA DE LA CARGA1
ESTADO ESTABLE'CORRIENTE DEL EJE EN CUADRATURA
CORRIENTE DEL EJE DIRECTO I3="ÍI3CORRIENTE DE FASE 15='i 15CORRIENTE DE EXCITACIÓN I4='?I4TORQ.UE ELECTROMAGNÉTICO T1 = 'ÍT1ÁNGULO DELTA D='ÍDVOLTAJE DE EXCITACIÓN C5=1JC5SALIDA DEL ESTABILIZADOR DEL SISTEMA C3="»C3VOLTAJE DE SALIDA DEL REGULADOR C4="ÍC4VOLTAJE TERMINAL DEL GENERADOR U7='ÍU7
V(7)=DV(8)=C3
V(10>=C5DELETE ClDIM Cl(5>C1(1)=I2C1(2)=I3C1(3)=I5C1(4)=T1C1(5)=I416=0T2=0T3=0
APÉNDICE 'A' PAG. 10
tlBO REM ALMACENAMIENTO DE VALORES INICIALESj90 N2=ll
i-700 N5=T9/HO,210 T2=T81220 DELETE W2,W3»G1230 DIM W2<N2)»W3(N2>»G(N2)1240 PAGE!250 PRINT "JJNOMBRE DEL ARCHIVO DE DATOStGGG'í1260 INPUT O*1270 0*='eTESIS/'*0*1280 CALL 'FILE'»H8fO*»X*1290 IF X*=" THEN 13501300 PRINT 'J YA EXISTE EL ARCHIVO: * ÍO*1310 PRINT "J DESEA DESTRUIR SU CONTENIDO? (Si o No>:GG'í1320 INPUT X*1330 IF X*='NO' THEN 12501340 KILL O*1350 CRÉATE O* i <N5+4)*9+l > O1360 PAGE1370 PRINT eYt'JJJJJJ ARCHIVO1380 PRINT 'J SE ESTA EJECUTANDO EL PROGRAMA'1390 W2=1.0E+3001400 W3=-W2410 Kl=0420 OPEN 0*í l» 'U' fX*430 CALL 'REUIND'»!440 URITE * i :N2»T8»T9»W2fW3fK l450 REM ALMACENAMIENTO DE VALORES460 G(1)=C1(1)470 G(2)=C1<2)480 G(3)=C1(3)490 G(4>=C1(5)500 G(5)=V(8)510 G(6)=V<9)520 G(7)=U7530 D3=V(6)-V1540 G<8)=V(10)550 G(9)=C1(4)560 G(10)=D3570 G(11)=V(7)580 REM ALMACENAMIENTO DE VALORES MÁXIMOS Y MÍNIMOS590 K1=K1+1600 URITE * l tT2»G610 FOR J=l TO N2620 W2<J)=U2(J> MIN G(J)630 W 3 < J ) = W 3 ( v ) > MAX G(J)640 NEXT J650 REM EVALUAR LAS DERIVADAS POR EL MÉTODO DE RUNGE KUTTA660 N=10670 M=0680 DELETE P9»S1690 GOSUB 3710700 KO=RO710 IF KOO1 THEN 2010
APÉNDICE 'A1 PAG» 11
«720 V7=VÓ*COS(V(7>>730 V8=V6*SIN<V<7»740 F(l>=V2*V7+P<l)*V(l)-V2*M<2>*V<6)-fP<2)*M<3>750 F < 2)=V2*V8+V2*V(1)*V(6)+P(3)*V(2)+V2*FO*P(10)760 F(3)=P(4)*V(1)+P(5)*V(3)770 F(4)=P(6)*V(4)+V2*FO*P(11)780 F<5)=V2*V(10)*R3/X2-fP<7)*V(5)+Y2*FO*P(12>790 A9=2*H800 F(6)=(V<2)* (P(8>*V<1>+P<9)*V(3)>-V(1)* (<V(2>-FO) /X) -T1) /A9810 F(7>=V2*<V(6>-1)820 REM ECUACIONES DIFERENCIALES SISTEMAS DE EXITACION TIPO DC830 F(8)=-V(8)/J2+P(22)*V(9)+P<23>*V(10>*(K4+S6)840 D9=(R7-U7)*K5/J4850 IF ABS(D9>=>Í.OE-4 THEN 1870860 D9=0870 F(9)=P<25)*V<8)+P(26)*V(9)+D9880 Y8=F(9)890 F(10)=P<28)*V(9)+V(10)*P(29)*(K4+S6>900 IF V(9)=>Q3 AND Y8>0 THEN 1930910 IF V(9)OQ2 AND Y8<0 THEN 1930920 GO TO 1940930 F(9)=0940 REM LLAMADA A SUBRUTINA DE SATURACIÓN DEL GENERADOR950 GOSUB 4100960 FO=X6*(V(2)/X+V(4)/X4+V(5)/X5)-X6/X2*D1970 REM CALCULO DE LA SATURACIÓN DEL EXCITADOR980 S6=A6*EXP(B6*V(10))990 GO TO 1690000 REM CALCULO DE LAS CORRIENTES IG»ID»IFD Y TORQUE010 C1(1)=P(8)*V(1)+P(9)*V(3)020 C1(2)=(V(2)-FO)/X030 T6=V(7)+V2*T2-fT3040 Cl(3)=CKl)*COS(T6)-»-Cl(2)*SIN<T6)050 C1<4)=V(2)*CK1)-V(1)*C1(2)060 C1(5)=(V(5)-FO)/X5070 REM080 REM CALCULO DEL VOLTAJE TERMINAL DE LA MAQUINAAOrt DCM ______ — __.____.»«________ __V / v r \ C . n — — .-— — — — —. — — — — —. — — — — — — — — —
100 U2=P(14)*V7+1/X*(MK1)*V(1)+M1(2)*VC2)*V(6)+M1(3)*V<3) )110 U 4 = U 2 + 1 / X * ( M I < 4 ) * V ( 4 ) * V < 6 ) + M 1 ( 5 ) * V ( 5 > * V < 6 ) )120 U3=P<15>*V8+P(13>*0(10>*R3/X2+1 /X*(M1(Ó)*V(1>*Y(6>+M1(7>*V(2) )130 U5=U3+1 /X* (MI (8) *V < 3) *V(6 ) +M1 (9)*V (4 ) -f MI (10) *V (5) )140 U6=U5+Y5*(FO/X)*(P(10)*(X6/X-1> +P <11> * <X6/X4)+P(12)*(X6/X5)>150 U7=SQR<U4*U4+U6*Uó)160 IF S0=l THEN 2200170 Q2=U7*UO180 Q3=U7*Ui190 GO TO 2220200 Q2=UO210 Q3=U1220 IF I6>0 THEN 2330230 IF P0=2 THEN 2330240 IF T2=>TO THEN 2270250 GO TO 2330

2->60 REM DISTURBIOSBO TO PO OF 2290» 2330
APÉNDICE 'A' PAG, 12
2280 REM INCREMENTO BRUSCO DE LA CARGA2290 T=0«3*T12300 T1=T1+T2310 16=12320 T3=AO2330 IF T2<=T9 THEN 14502340 CALL 'REWIND1»!2350 WRITE *l íN2»T8»T2»U2»U3f Kl2360 GLOSE2370 PRINT 'JDESEA SACAR RESULTADOS GRÁFICOS (Si o No). GGG'Í2380 INPUT X*2390 IF X*='SI' OR X*='S' THEN 24102400 GO TO 24402410 PRINT 'J PRENDA EL GRAFIZADOR (Pulse RETURN psrs continuar) ,GGG' í2420 INPUT Y*2430 GO TO 42902440 END2450 REM SUBRUTINA DE CONDICIONES INICIALES
2470 REM COEFICIENTES DE LAS ECUACIONES DIFERENCIALES2480 R=R4+R52490 Y5=T7+Y32500 X=Y4+Y52510 X7=1/(1/X1+1/X3+1/X>2520 X6=1/(1/X2+1/X4+1/X5+1/X)2530 X8=1/(1/X2+1/X4+1/X>2540 M9=R5*(X7/X-1)2550 M8=R1*X7*X7*Y5/(X3*X3*X>2560 DELETE P2570 DIM P(29)2580 P(1)=V2*R*(X7/X-1)/X2590 P(2)=V2*R*X7/(X3*X)2600 P(3)=-V2*R/X2610 P(4)=V2*R1*X7/(X3*X)2620 P(5)=V2*R1*(X7/X3-1>/X32630 P(6)=-V2*R2/X42640 P(7)=-V2*R3/X52650 P(10)=R/X2660 P(11)=R2/X42670 P(12)=R3/X52680 REM COEFICIENTES DE LA CORRIENTE IQ2690 P(8)=(1-X7/X)/X2700 P(9>=-X7/(X3*X>2710 REM COEFICIENTES DE LA CORRIENTE ID2720 P(16) = <1-X6/X)/X2730 P(17)=-X6/(X4*X)2740 P(18)=-X6/(X5*X>2750 REM COEFICIENTES DE LA CORRIENTE IF2760 P(19)=-X6/(X5*X4)2770 P(20)=(1-X6/X5)/X5|2780 REM COEFICIENTES DEL VOLTAJE TERMINAL DE LA MAQUINA2790 P(13)=Y5*X6/(X*X5>

APÉNDICE 'A' PAG. 13
2800 P(14)=1+Y5/X*(X7/X-1>2810 P<15)=1+Y5/X*<X6/X-1>2820 DELETE MI2830 DIM MI (10)2840 M1<1)=Y5*R/X*<X7/X-1)*<X7/X-1)+M8+M92850 MK2) = <X6-X7)*Y5/X2860 D5=Y5*R*X7/< X*X3)*(X7/X-1)2870 MK3)=D5+Y5*R1*X7/<X3*X3)*<X7/X3-1)+R5*X7/X32880 MK4)=Y5*X6/X42890 M1(5)=Y5*X6/X52900 M1(6)=Y5*(X6-X7)/X2910 MK7> = <X6/X-1)*<R5-Y5*R/X)2920 M1(8)=-X7*Y5/X32930 MK9)=X6/X4*(R5-Y5*R2/X4)2940 MK10)=X6/X5*(R5-Y5*R3/X5)2950 REM CONDICIONES INICIALES2960 Z2=R2970 V6=V32980 Z3=X+X12990 C0=23000 60 TO CO OF 3010*30303010 B1=A53020 GO TO 30403030 B1=3.141592+A53040 I5=K*COS<B1>/V33050 I9=K*SIN<B1)/V33060 I1=SQR<I5*I5+I9*I9)3070 REM PARTE REAL DEL VOLTAJE GENERADO3080 Y1=V33090 Zl=03100 E1=Y1-Z2*I5+Z3*I93110 REM PARTE IMAGINARIA DEL VOLTAJE GENERADO3120 E2=Z1-Z2*I9-Z3*I53130 E=SQR(El*El-fE2*E2)3140 D=ATN(E2/E1)3150 I2=I1*SIN(B1-D+1.570796)3160 I3=I1*COS(B1-D+1.570796)3170 I4=(E-(X2-X1)*I3)/X23180 F1 = (X1+X)*I23190 F3=X1*I23200 FO=X2*< 13+14)3210 F2=X*I3+FO3220 F4=FO3230 REM COEFICIENTES DE LA FUNCIÓN DE SATURACIÓN SISTEMA DE EXITACION3240 S4=S4/U13250 S5=S5/U13260 A6=S4*S4*S4*S4/(S5*S5*S5)3270 B6=4/E5*LOG(S5/S4)3280 REM LLAMADA A SUBRUTINA DE SATURACIÓN3290 GOSUB 41003300 I4=(FO+D1)/X2-I33310 F5=X5*I4+FO3320 T1 =F2*< P(8>*F 1+P(9)*F3)-Fl*(F2-FO)/X3330 V5=R3*I4
APÉNDICE 'A1 PAG. 14
tf!
V5=V5*X2/R3S6=A6*EXP<B6*V5>
K5=K5/U1J1=J1/U1
\Q U1=U1/U1a uo=-uih0 REM CALCULO DEL VOLTAJE INICIAL DE LA MAQUINA
V7=V6*COS<D>Y8=V6*SIN(D>
¡J40 U2=P<14>*V7+1/X*<M1<1>*F1+M1<2>*F2*V1+M1<3>*F3>jgo U4=U2+1/X*<MK4)*F4*V1+M1<5>*F5*V1>
U3=P(15)*V8+P(Í3)*V5*R3/X2+1/X*(M1(6)*F1*V1+M1(7)*F2),70 U5=U3+1/X*<M1<8)*F3*V1+M1<9>*F4+M1<10>*F5>
5,80 U6=U5+Y5*(FO/X)*<P(10)*<X6/X-1)+P(11>*X6/X4+P(12)*X6/X5>490 U7=SQR(U4*U4+U6*UÓ)
IF S0=l THEN 3540Q2=U7*UO
520 G3=U7*U1530 GO TO 3560540 Q2=UO550 Q3=U1560 P<21)=0570 P(22)=K3/(J1*J2)580 P<23)=-<K3/<J1*J2»
P(24)=-K5/J4¿00 P<25)=-K5/J4¿10 P<26)=-1/J4¿20 P(27)=0¿30 P(28)»1/.J1¿40 P(29)=-1/J1 .¿50 R7=U760 REM CONDICIONES INICIALES DEL SISTEMA DE EXITACION
¿70 C3=0¿80 C4=0¿90 C5=V5700 RETURN710 REM MÉTODO DE RUNGE KUTTA
DIM P9(N)»S1(N)»V(N)»F(N)730 M=M-fl740 GO TO M OF 3750»3780»3870,3940>4020750 REM PASO 1
R0=lRETURN
780 REM PASO 2?90 FOR J=l TO N«00 SKJ)=V(J)
P9(J)=F(J)V<J>=SKJ)-f0.5*HO*F<J>NEXT J
640 T2=T2+0»5*HOR0=lRETURNREM PASO 3

APÉNDICE 'A' PAG. 15
3880 FOR J=l TO N3890 P9(J)=P9<J)+2*F(J)3900 V<J)=SKJ>+0,5*HO*F<J>3910 NEXT J3920 R0=l3930 RETURN3940 REM PASO 43950 FOR J=l TO N3960 P9(J)=P9(J)-f2*F<J)3970 V(J)=S1(J)+HO*F(J>3980 NEXT J3990 T2=T2+0*5*HO4000 R0=l4010 RETURN4020 REM PASO 54030 FOR J=l TO N4040 V < J > =S1< J > + < P9 < J > +F < J >>*HO/64050 NEXT J4000 H=04070 R0=04080 RETURN4090 END4100 REM SUBRUTINA DE SATURACIÓN4110 IF S2=0 THEN 41504120 F8=ABS(FO)4130 IF F8<F9 THEN 41504140 60 TO 41704150 Dl=04160 RETURN4170 IF F8<P1 AND F8=>F9 THEN 42104180 IF F8<P2 AND F8=>P1 THEN 42304190 D1=P3*F8-P44200 GO TO 42404210 D1=P5*F8-P64220 GO TO 42404230 D1=P7*F8-P84240 IF F0<0 THEN 42704250 DI=014260 RETURN4270 D1=-D14280 RETURN4290 DELETE 1201,74194300 Z9=MEMORY4310 APPEND 'GRÁFICOS'Í43204320 REM SE CARGA EL PROGRAMA DE GRÁFICOS

APÉNDICE 'A' PAG, 16
100 REM SISTEMA DE EXCITACIÓN TIPO AC ---- "SISTAC1 ----110 REM SIMULACIÓN DE LOS SISTEMA DE EXCITACIÓN120 REM DE CORRIENTE ALTERNA INCLUIDO EL GENERADOR130 REM SINCRÓNICO EL MISMO QUE ESTA ACOPLADO A UN140 REM SISTEMA LINEA DE TRANSMISIÓN - BARRA INFINITA,150 REM160 REM EN ESTE 'PROGRAMA SE SIMULAN LOS SISTEMAS DE170 REM EXCITACIÓN TIPO AC1 Y TIPO AC2 SEGÚN LA180 REM DENOMINACIÓN DEL IEEE,190 REM200 PRINT "LJ PARÁMETROS DE LOS SISTEMAS DE EXITACION"210 PRINT 'J TIEMPO MINIMOí T8=G'Í220 INPUT T8230 PRINT 'J TIEMPO MÁXIMO: T9=G'Í240 INPUT T9250 PRINT "JPASO DE INTEGRACIÓN HO=G'Í260 INPUT HO270 PRINT ' JINGRESE VOLTAJE DE EXCITACIÓN MÁXIMO E5=G'J280 INPUT E5290 PRINT ' JINGRESE CONSTANTES DEL SISTEMA DE EXCITACIONGG1300 PRINT ' JCONSTANTE DE TIEMPO DEL EXCITADOR J1=G"Í310 INPUT Jl320 PRINT 'JCONST. DE TIEMPO DEL ESTABILIZADOR DEL SISTEMA J2=G"Í330 INPUT J2340 PRINT • JCONSTANTE DE TIEMPO DEL REGULADOR DE VOLTAJE J4=G"Í350 INPUT J4360 PRINT • JCONSTANTE DE DESMAGNETIZACIÓN K2=G'Í370 INPUT K2380 PRINT "J ESTÁN LOS DATOS BIEN INGRESADOS? (Si o No>G"í390 INPUT J*400 IF J*='SI' OR J*='S' THEN 420410 GO TO 200420 PAGE430 PRINT "JGANANCIA DEL ESTABILIZADOR DEL SISTEMA K3=G'Í440 INPUT K3450 PRINT ' JGANANCIA DEL EXCITADOR K4=G"Í460 INPUT K4470 PRINT ' JGANANCIA DEL REGULADOR DE VOLTAJE K5=G"Í480 INPUT K5490 PRINT • JINGRESE COEFICIENTES DE LA CURVA DE SATURACIÓN S4=G*Í500 INPUT S4510 PRINT "J S5=G'Í520 INPUT S5530 PRINT 'JVOLTAJE MÍNIMO DEL REGULADOR R8=G'Í540 INPUT R8550 PRINT 'JVOLTAJE MÁXIMO DEL REGULADOR R9=G"Í56O INPUT R9570 PRINT QYÍ'LJ SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA'
590 REM SELECCIÓN DEL SISTEMA DE EXCITACIÓN TIPO AC600 PRINT "LJ SELECCIONE EL TIPO DE SISTEMA DE EXCITACIONGG "610 PRINT 'J S0=l --- > SISTEMA DE EXCITACIÓN TIPO AC1'620 PRINT 'J S0=2 --- > SISTEMA DE EXCITACIÓN TIPO AC2"630 PRINT "JJ ESCOJA OPCIÓN i S0= GG'»

APÉNDICE 'A' PAG» 17
¿40 INPUT¿50 IF S0¿60 GO TO¿70 IF 80680 PRINT690 REM700 REM710 PRINT720 INPUT730 PRINT740 INPUT750 PRINT760 INPUT770 PRINT780 INPUT790 PRINT800 INPUT810 PRINT820 INPUT830 PRINT
SOl OR S0=2 THEN 6705901 THEN 860'JINGRESE PARÁMETROS DEL SISTEMA TIPO AC2 GG
850860
GO TOPRINT
UO=G'Í
U1=G'Í
G9=GG'Í
01=GG'Í
02=GG'Í
E3=GG'Í
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO AC1
8808909009109209309409509609709809901000101010201030104010501060107010801090110011101120113011401150UóO1170
«JVOLTAJE MÍNIMO DEL REGULADOR 2da. ETAPAUO' JVOLTAJE MÁXIMO DEL REGULADOR 2da. ETAPAUl"JGANANCIA DE LA 2ds. ETAPA DEL REGULADORG9• JGANANCIA DE LA REALIMENTACION DEL CAMPO01' JGANANCIA DEL LIMITE DE CAMPO DEL EXCITADOR02'JREFENCIA DEL LIMITE DE CAMPO DEL EXCITADORE3@Y:'J PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO AC2Í3 V * • __-_ ____________—.______.______._________________—.___•U:T* — — — — — • .— — — — « »
880eY:'fa v + •VS I #
eYÍBYÍeYteYl
PRINTPRINTPRINTPRINTPRINT eY:PRINT @Y:PRINT @YÍPRINT @Y:PRINT eYt'JVOLTAJEPRINT @Y:"JVOLTAJE
'JVOLTAJE DE EXCITACIÓN MÁXIMO'JCONSTANTE DE TIEMPO DEL EXCITADORJCONST. DE TIEMPO DEL ESTABILIZADORJCONST. DE TIEMPO DEL REGULADOR DE VOLTAJEJCONSTANTE DE DESMAGNETIZACIÓNJGANANCIA DEL ESTABILIZADORJGANANCIA DEL EXCITADORJGANANCIA DEL REGULADOR DE VOLTAJE
MÍNIMO DEL REGULADORMÁXIMO DEL REGULADOR
E5=Jl=J2=J4=K2=K3=K4=K5=R8=R9=
ÍESÍJ1»J2?J4ÍK2»K3?K4ÍK5ÍR8»R9
IF S0=l THEN 1050PRINT BYÍ'JVOLTAJE MÍNIMO DEL REGULADOR 2ds, ETAPAPRINT eYfJVOLTAJE MÁXIMO DEL REGULADOR 2d3, EATAPA
JGANANCIA DEL REGULADOR 2ds, ETAPAJGANANCIA DEL CAMPO DEL EXCITADORJGANANCIA DEL LIMITE DE CAMPO DEL EXCITADORJREF,DEL LIMITE DE CAMPO DEL EXCITADOR
6V:eYÍ
PRINTPRINTPRINT ev:PRINT @Y:16=0PRINT 'JJJGOSUB 3390PRINT <?Y: * LJPRINT ev:-PRINT ev:'jPRINT @Y:'JPRINT 6Y:"JIF P0=2 THENPRINT @Y:-JGO TO 1170PRINT @Y:-JPRINT BY:-J
UO='ÍUOU1='?U1G9='ÍG901="Í0102='Í02E3="ÍE3
SE ESTA CALCULANDO CONDICIONES INICIALES
CONDICIONES INICIALES1
TIEMPO MINIMOÍ T8='ÍT8TIEMPO MÁXIMO! T9='ÍT9PASO DE INTEGRACIÓN: HO=*ÍHO
1160VARIACIÓN BRUSCA DE LA CARGA"
CORRIENTE DEL EJE ENESTADO
CUADRATURAESTABLE
I2='»I2

APÉNDICE 'A1 PAG. 18
CORRIENTE DEL EJE DIRECTOCORRIENTE DE FASECORRIENTE DE EXCITACIÓNTORQUE ELECTROMAGNÉTICOÁNGULO DELTAVOLTAJE DE EXCITACIÓNSALIDA DEL ESTABILIZADOR DEL SISTEMAVOLTAJE DE SALIDA DEL REGULADORVOLTAJE TERMINAL DEL GENERADOR
13=15=14=
D=E6=C3=C4=U7=
J
1180 PRINT 6YÍ-J1190 PRINT BYfJ1200 PRINT 6Y:»J1210 PRINT 6YÍ'J1220 PRINT dYÍ'J1230 PRINT 6Y:'J1240 PRINT eY'.'J1250 PRINT BYJ'J1260 PRINT 6Y:'J1270 DELETE V1280 DIM V<10>1290 V(1)=F11300 V(2)=F21310 V<3)=F31320 V(4)=F41330 V(5)=F51340 V<6)=V11350 V(7)=D1360 V(8)=C31370 V(9)=C41380 V(10)=E71390 DELETE Cl1400 DIM Cl<5>1410 C1(1)=I21420 CK2)=I31430 C1C3)=I51440 C1(4)=T11450 C1(5)=I41460 16=01470 T2=01480 T3=01490 REM ALMACENAMIENTO DE VALORES INICIALES1500 N2=121510 N5=T9/HO1520 T2=T81530 DELETE W2»W3»G1540 DIM W2(N2)»W3(N2)»G(N2)1550 PAGE1560 PRINT "JJNOMBRE DEL ARCHIVO DE DATOStGGG'í1570 INPUT 0$1580 0*='GTESIS/'SO*1590 CALL "FILE'»H8fO*»X*1600 IF X*=" THEN 16601610 PRINT "J YA EXISTE EL ARCHIVO:'JO*1620 PRINT 'J DESEA DESTRUIR SU CONTENIDOTÍSi o NoKGG'í1630 INPUT X*1640 IF X*='NO" THEN 15601650 KILL O*1660 CRÉATE 0*í<N5+4)*9+l»01670 PAGE1680 PRINT GYÍ'JJJJJJ ARCHIVO1690 PRINT "JJ SE ESTA EJECUTANDO EL PROGRAMA'1700 W2=1.0E+3001710 W3=-W2
ÍT1
JC3
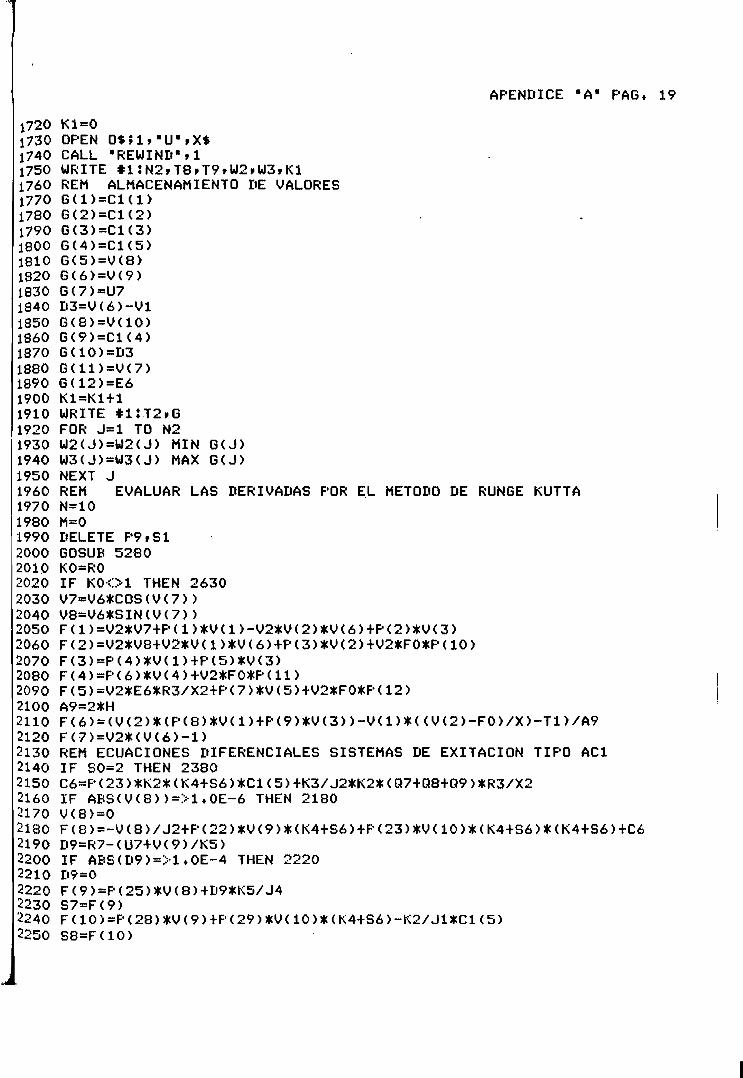
APÉNDICE «A" PAG» 19
1720 Kl=01730 OPEN 0 * ; i » " U ' » X *1740 CALL ' R E W I N D * » 11750 WRITE * 1 Í N 2 » T 8 > T 9 » W 2 » W 3 » K 11760 REM ALMACENAMIENTO DE VALORES1770 G(1)=C1(1)1780 G(2)=C1(2)1790 G(3)=C1(3>1800 G ( 4 ) = C 1 ( 5 )1810 G ( 5 ) = V ( 8 >1820 G ( 6 ) = V ( 9 >1830 G(7)=U71840 D3=V(6)-V11850 G ( 8 ) = V < 1 0 )1860 G ( 9 ) = C 1 ( 4 )1870 G(10)=D31880 G ( 1 1 ) = V < 7 >1890 G(12)=E61900 K1=K1+11910 WRITE *l!T2rG1920 FOR J=l TO N21930 W 2 ( J ) = W 2 ( J ) MIN G ( J )1940 W3(J)=W3(J) MAX G(J)1950 NEXT J1960 REM EVALUAR LAS DERIVADAS POR EL MÉTODO DE RUNGE KUTTA1970 N=101980 M=01990 DELETE P9*S12000 GOSUB 52802010 KO=RO2020 IF KOO1 THEN 26302030 V7=V6*COS(V(7»2040 V8=V6*SIN(V(7))2050 F(1)=V2*V7+P(1)*V<1>-V2*V(2)*V(6)+P(2>*V(3)2060 F(2)=V2*V8+V2*V(1)*V(6)+P(3)*V(2)+V2*FO*P(10)2070 F(3)=P(4)*V(1)+P(5)*V(3)2080 F(4)=P(6 > *V(4)+V2*FO*P(11)2090 F(5)=V2*E6*R3/X2-fP(7)*V(5>+V2*FO*P(12)2100 A9=2*H2110 F(6)=(V<2)*(P(8)*V(1)+P(9)*V(3))-V(1)*((V(2)-FO)/X)-T1)/A92120 F(7)=V2*(V(6)-1)2130 REM ECUACIONES DIFERENCIALES SISTEMAS DE EXITACION TIPO AC12140 IF S0=2 THEN 23802150 CÓ=P(23 > *K2*(K4+S6)*C1(5)+K3/J2*K2*(Q7+Q8+Q9)*R3/X22160 IF ABS(V(8))=>l«OE-6 THEN 21802170 V(8)=02180 F(8)=-V(8)/J2+P(22)*V(9)*(K4+SÓ)+P(23)*V(10)*(K4+S6)*(K4+S6)+C62190 D9=R7-(U7-t-V(9)/K5)2200 IF ABS(D9)=>1.0E-4 THEN 22202210 D9=02220 F(9)=P(25)*V(8)+D9*K5/J42230 S7=F(9)2240 F(10)=P(28)*V(9)+P(29)*V(10)*(K4+S6)-K2/J1*C1(5)2250 S8=F(10)

APÉNDICE 'A' PAG, 20
260 IF V(9>=0>R9 AND S7>0 THEN 2290270 IF V(9X=R8 AND S7<0 THEN 2290280 GO TO 2300290 F(9)=0300 IF V(10X=0 AND S8<=0 THEN 2320310 GO TO 2330320 F<10)=0330 REM LLAMADA A SUBRUTINA DE SATURACIÓN DEL GENERADOR340 GOSUB 5670350 FO=X6*(V(2)/X+V(4>/X4+V(5)/X5>-X6/X2*D1360 S6=A6*EXP(B6*V(10»370 GO TO 2000380 REM ECUACIONES DIFERENCIALES DE LOS SISTEMAS TIPO AC2390 C7=P(23)*K2* < K4+S6)*C1(5 > +K3/J2*K2* < Q7+Q8+G9)*R3/X2400 IF ABS(V(8))=>1.0E-6 THEN 2420410 V<8>=0420 F(8>=-V(8>/J2+H9*(K4+S6)*P(22>+P(23>*V(10>*<K4+S6>*(K4+S6)+C7430 D9=R7-(U7+V(9)/K5)440 IF ABS(D9>=>1.0E-4 THEN 2460450 D9=0460 F(9)=D9*K5/J4+P<25>*V(8)470 S7=F(9>480 F<10>=P(28>*H9+P(29)*V(10>*(K4+S6>-K2/J1*C1(5>490 S8=F(10)500 IF V(9)=>R9 AND S7>0 THEN 2530510 IF V(9X=R8 AND S7<0 THEN 2530520 GO TO 2540530 F(9)=0540 IF V(10X=0 AND S8OO THEN 2560550 GO TO 2570560 F(10)=0570 REM LLAMADA A SUBRUTINA DE SATURACIÓN580 GOSUB 5670590 FO=X6*(V(2>/X+V(4)/X4+V(5>/X5)-X6/X2*D1600 REM EVALUAR LA SATURACIÓN DEL EXCITADOR610 S6=A6*EXP(B6*V(10)>620 GO TO 2000630 REM CALCULO DE CORRIENTES Ia»Id>Ifd»« Toroue640 C K 1 ) = P ( 8 > * V ( 1 ) + P ( 9 ) * V ( 3 )650 C1 (2 )= (V (2 ) -FO) /X660 T6=V(7)+V2*T2+T3670 C1(3)=C1(1)*COS(T6)+C1(2)*SIN(T6)680 C1(4)=V(2)*C1(1)-V(1)*C1(2)690 C1(5 )= (V(5>-FO) /X5700 Q7=(1/X5-X6/(X5*X5))*(V2*E6*R3/X2+P(7)*V(5 > +V2*FO*P(12))710 G8=-X6/(X*X5)*(V2*V8+V2*V(1)*V(6>+P(23)*V(2)+V2*FO*P(10>)720 Q9=-X6/(X4*X5)*(P(6)*V(4)+V2*FO*P(11))730 IF S0=2 THEN 2760740 GO TO 2940750 REM CALCULO DEL VOLTAJE PROPORCIONAL A LA CORRIENTE DE CAMPO (VFE>760 00=V(10>*(S6-fK4)+K2*Cl(5>*R3/X2770 05=01*00780 04=02*(E3-00)790 06=V(9)-05

280028102820283098402850286028702880289029002910292029302940295029602970298029903000301030203030304030503060307030803090310031103120313031403150316031703180319032003210322032303240325032603270328032903300331033203330
APÉNDICE 'A' PAG. 21
IF 06<=04 THEN 2820IF 06>04 THEN 2840G8=06GO TO 2860G8=04REH LIMITES DEL REGULADOR 2d3, ETAPAIF UO<=G8*G9 AND G8*G9<=U1 THEN 2890IF G8*G9=>U1 THEN 2910IF G8*G9<=UO THEN 2930H9=G8*G9GO TO 2940H9=U160 TO 2940H9=UOREM CALCULO DEL VOLTAJE INCLUYENDO LA REGULACIÓN DEL RECTIFICADORCK5>=R3/X2*C1<5>N8=G6*CK5)/V<10>IF N8<=0.433 THEN 3000IF 0.433<N8 AND N8<0,75 THEN 3020IF N8=>0.75 THEN 304067=1-0.58*N860 TO 305067=SQR(O.75-N8*N8)60 TO 3050G7=1*732*(1-N8>E6=V<10>*67REM CALCULO DEL VOLTAJE TERMINAL DEL GENERADORREMU2=P<14)*V7+1/X*(M1(1)*V(1>+M1<2)*V(2)*V(6)+MK3)*V<3»U4=U2-fl/X*(Ml(4)*V(4)*V(6>+Ml(5)*V.(5>*V(6)>U3=P<15>*V8+P<13>*E6*R3/X2+1/X*(M1<6>*V<1>*V<6>+M1<7>*V<2»U5=U3+1/X*(M1(8)*V(3)*V(6)+M1<9>*V(4)+M1<10)*V(5»U6=U5+Y5*(FO/X)*(P(10)*(X6/X-1>+P(11)*<X6/X4)+P(12)*(X6/X5»U7=SQR < U4*U4+U6*U6)IF I6>0 THEN 3260IF P0=2 THEN 3260IF T2=>TO THEN 3190GO TO 3260REM DISTURBIOSGO TO PO OF 3210,31600REM INCREMENTO BRUSCO DE LA CARGAT=0*3*T1T1=T1+T16=1T3=AO60 TO 3260IF T2<=T9 THEN 1760CALL 'REWIND'»!URITE *lÍN2fT8rT2fW2»W3,KlCLOSEPRINT 'JDESEA SACAR RESULTADOS GRÁFICOS (Si o No )GG'ÍINPUT X*IF X*='SI' OR X*='S" THEN 3340GO TO 3380

APÉNDICE 'A' PAG. 22
3340 PRINT 'JPRENDA EL GRAFIZADOR (Pulse RETURN para continuar)GG'í3350 INPUT Y*3360 REM LLAMAR SUBRUTINA PARA GRAFICACION3370 GO TO 58603380 END3390 REM SUBRUTINA DE CONDICIONES INICIALES3400 REM COEFICIENTES DE LAS ECUACIONES DIFERENCIALES3410 R=R4+R53420 Y5=Y3+T73430 X=Y4+Y53440 X7=1/(1/X1+1/X3+1/X)3450 X6=1/(1/X2-H/X4+1/X5+1/X>3460 X8=1/(1/X2+1/X4+1/X)3470 M9=R5*(X7/X-1)3480 M8=R1*X7*X7*Y5/(X3*X3*X>3490 DELETE P3500 DIM P(29)3510 P(1)=V2*R*(X7/X-1>/X3520 P(2>=V2*R*X7/(X3*X>3530 P(3>=-V2*R/X3540 P(4>=V2*R1*X7/(X3*X>3550 P(5)=V2*R1*<X7/X3-1)/X33560 P(6)=-V2*R2/X43570 P<7>=-V2*R3/X53580 P(10)=R/X3590 P(11)=R2/X43600 P(12)=R3/X53610 REM COEFICIENTES DE LA CORRIENTE IQ3620 P(8)=(1-X7/X)/X3630 P(9)=-X7/(X3*X)3640 REM COEFICIENTES DE LA CORRIENTE ID3650 P(16)=(1-X6/X)/X3660 P(17>=-X6/(X4*X)3670 P(18)=-X6/(X5*X)3680 REM COEFICIENTES DE LA CORRIENTE IF3690 P<19>=-X6/<X5*X4>3700 P(20)=(1-X6/X5)/X53710 REM COEFICIENTES DEL VOLTAJE TERMINAL DE LA MAQUINA3720 P(13)=Y5*X6/(X*X5)3730 P(14)=1+Y5/X*(X7/X-1)3740 P<15>=1+Y5/X*(X6/X-1>3750 DELETE MI3760 DIM MK10)3770 MKl)=Y5*R/X*(X7/X-l)*(X7/X-l)+M8-fM93780 M1(2)=(X6-X7)*Y5/X3790 D5=Y5*R*X7/<X*X3)*(X7/X-1)3800 MI(3)=D5+Y5*R1*X7/(X3*X3)*(X7/X3-1)+R5*X7/X33810 M1(4)=Y5*X6/X43820 MK5>=Y5*X6/X53830 MKÓ)=Y5#(X6-X7)/X3840 M1(7)=(X6/X-1)*(R5-Y5*R/X)3850 M1(8)=-X7*Y5/X33860 M1(9)=X6/X4*(R5-Y5*R2/X4)3870 M1(10>=X6/X5*(R5-Y5*R3/X5>

APÉNDICE 'A' PAG. 23
3880 REM CONDICIONES INICIALES3890 Z2=R3900 V6=V33910 Z3=X+X13920 C0=23930 60 TO CO OF 3940»39603940 B1=A53950 GO TO 39703960 B1=3.141592+A53970 I5=K*COS(B1)/V33980 I9=K*SIN<B1)/V33990 Ii=SQR<I5*I5+I9*I9)4000 REM PARTE REAL DEL VOLTAJE E4010 Y1=V34020 Zl=04030 E1=Y1-Z2*I5+Z3*I94040 REM PARTE IMAGINARIA DEL VOLTAJE E4050 E2=Z1-Z2*I9-Z3*I54060 E=SQR(E1*E1+E2*E2)4070 D=ATN(E2/E1)4080 I2=I1*SIN<B1-D+1.570796)4090 I3=I1*COS<B1-D+1.570796)4100 I4=(E-(X2-XÍ)*I3)/X24110 F1=(X1+X)*I24120 F3=X1*I24130 FO=X2*(I3+I4)4140 F2=X*I3+FO4150 F4=FO4160 REM LLAMADA A SUBRUTINA DE SATURACIÓN4170 GOSUB 56704180 I4=(FO+D1)/X2-I34190 F5=X5*I4+FO14200 T1=F2*(P<8)*FH-P<9)*F3)-F1*(F2-FO)/X'4210 V5=R3*I4¡4220 GOSUB 48904230 IF S0=2 THEN 42504240 GO TO 43904250 REM NORMALIZACIÓN DE LAS VARIABLES DEL REGULADOR TIPO AC24260 S4=S4/U14270 S5=S5/U14280 A6=S4*S4*S4*S4/S5*S5*S54290 B6=4/E5*LOG(S5/S4)4300 S6=A6*EXP(B6*E7)4310 K2=K2/U14320 K4=K4/U14330 K5=K5/U14340 U1=U1/U11350 UO=UO/U11360 R8=R8/U11370 R9=R9/U14380 GO TO 45001390 REM NORMALIZACIÓN DE LAS VARAIBLES DEL REGULADOR TIPO AC11400 S4=S4/R91410 S5=S5/R9

APÉNDICE 'A' PAG. 24
4420 A6=S4*S4*S4*S4/S5*S5*S54430 B6=4/E5*LOG(S5/S4)4440 S6=A6*EXP<B6*E7)4450 K2=K2/R94460 K4=K4/R94470 K5=K5/R94480 R9=R9/R94490 R8=R8/R94500 REM CALCULO DEL VOLTAJE INICIAL DE LA MAQUINA4510 V7=V6*COS<D>4520 V8=V6*SIN(D>4530 U2=P(14)*V7+1/X*<M1(1)*FH-M1(2)*F2*V1+M1<3)*F3>4540 U4=U2+1/X*(M1(4)*F4*V1+M1(5)*F5*V1)4550 U3=P(15>*V8+P<13>*V5-H/X*(M1<6>*F1*V1+M1(7>*F2>4560 U5=U3+1/X*(MK8>*F3*V1+M1(9)*F4+M1(10>*F5>4570 U6=U5+Y5*<FO/X)*(P(10)*<X6/X-1)+P(11)*X6/X44-P(12)*X6/X5)4580 U7=SQR(U4*U4-fU6*U6)590 P(21)=0
4600 P(22)=K3/(J1*J2)4610 P(23>=-(K3/<J1*J2»4620 P(24)=-K5/J44630 P(25)=-K5/J44640 P(26>=-1/J44650 P<27>=0660 P(28)=1/J1
4670 P(29)=-1/J14680 Q7=<1/X5-X6/(X5*X5))*(V2*V5+P(7)*F5+M2*FO*P(12»4690 Q8=-X6/(X*X5)*(V2*V8+V2*F1*VH-P(3)*F2+V2*FO*P(10) )4700 G9=-X6/ (X4*X5) * < P (6) *F4+V2*FO*P (11»4710 C9=Q7+Q8+Q94720 REM CONDICIONES^ INICIALES DEL SISTEMA DE EXITACION4730 C3=04740 C4=(K4+S6)*E7+K2*I44750 R7=U7+C4/K54760 IF S0=l THEN 48804770 00=(K4-fS6)*E7+K2*I44780 05=01*004790 C4=00/G94-054800 R7=U7+C4/K54810 04=02*(E3-00)4820 06=C4-054830 IF 06O04 THEN 48604840 G8=044850 GO TO 48704860 G8=064870 H9=G8*G94880 RETURN4890 REM SUBRUTINA PARA EL CALCULO INICIAL DE LA REGULACIÓN4900 C5=V5*X2/R3
10 E6=C54920 I4=I4*R3/X24930 Y6=I44940 DEF FNA(Y6)=E6*Y6/I44950 IF Y6<=0,433 THEN 4980
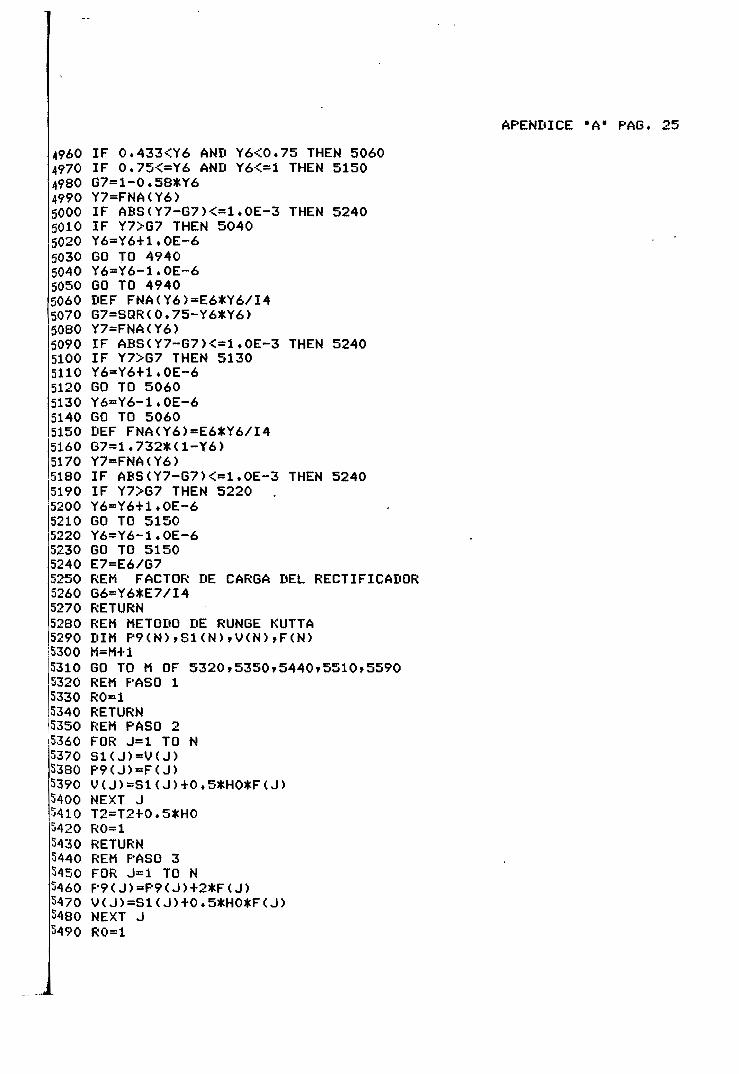
APÉNDICE 'A' PAG. 25
4960 IF 0,433<Y6 AND Y6<0.75 THEN 50604970 IF 0.75<=Y6 AND Y6<=1 THEN 51504980 G7=1-0*58*Y64990 Y7=FNA(Y6)5000 IF ABS<Y7-G7><=1,OE-3 THEN 5240gOlO IF Y7>G7 THEN 50405020 Y6=Y6+1.0E-65030 60 JO 49405040 Y6=Y6-1.0E-65050 GO TO 49405060 DEF FNA<Y6>=E6*Y6/I45070 G7=SQR<0.75-Y6*Y6>5080 Y7=FNA(Y6)5090 IF ABS<Y7-G7><=1.OE-3 THEN 52405100 IF Y7>G7 THEN 51305110 Y6=Y6+l«OE-65120 GO TO 50605130 Y6=Y6-l,OE-65140 GO TO 50605150 DEF FNA(Y6)=E6*Y6/I45160 G7=1.732*<1-Y6>5170 Y7=FNA(Y6)5180 IF ABS<Y7-G7><=1.OE-3 THEN 52405190 IF Y7>67 THEN 5220 .5200 Y6=Y6+1.0E-65210 GO TO 51505220 Y6=Y6-1.0E-65230 GO TO 51505240 E7=E6/G75250 REM FACTOR DE CARGA DEL RECTIFICADOR5260 G6=Y6*E7/I45270 RETURN5280 REM MÉTODO DE RUN6E KUTTA5290 DIM P9(N)»Sl(N)fV(N)»F<N)J5300 M=M+15310 GO TO M OF 5320»5350»5440»5510»55905320 REM PASO 15330 R0=l5340 RETURN5350 REM PASO 25360 FOR J=l TO N5370 S1(J)=V(J)5380 P9<J)=F(J)5390 V(J)=SKJ)+0«5*HO*F(J)5400 NEXT J5410 T2=T2+0.5*HO5420 R0=l5430 RETURN5440 REM PASO 35450 FOR J=l TO N5460 P9<J)=P9(J)+2*F(J)5470 V(J)=SKJ)+0«5*HO*F(J)5480 NEXT J5490 R0=l
J

APÉNDICE 'A' PAG. 26
5500 RETURN5510 REM PASO 45520 FOR J=l TO N5530 P9<J)=P9(J)+2*F<J)5540 V(J)=S1(J)+HO*F(J)5550 NEXT J5560 T2=T2+0.5*HO5570 R0=l5580 RETURN5590 REM PASO 55600 FOR J=l TO N5610 V(J)=SKJ) + (P9<J>+F(J))*HO/65620 NEXT J5630 M=05640 R0=05650 RETURN5660 END5670 REM SUBRUTINA DE SATURACIÓN5680 IF S2=0 THEN 57205690 F8=ABS(FO>5700 IF F8<F9 THEN 57205710 GO TO 57405720 Dl=05730 RETURN5740 IF F8<P1 AND F8=>F9 THEN 57805750 IF F8<P2 AND F8=>P1 THEN 58005760 D1=P3*F8-P45770 60 TO 58105780 D1=P5*F8-P65790 GO TO 58105800 D1=P7*F8-P85810 IF F0<0 THEN 5840820 D1=D1
5830 RETURN5840 D1=-D1850 RETURN
5860 DELETE 1201*83795870 Z9=MEMORY5880 APPEND 'GRÁFICOS1í58905890 REM LINEA DE CARGA DE PROGRAMAS
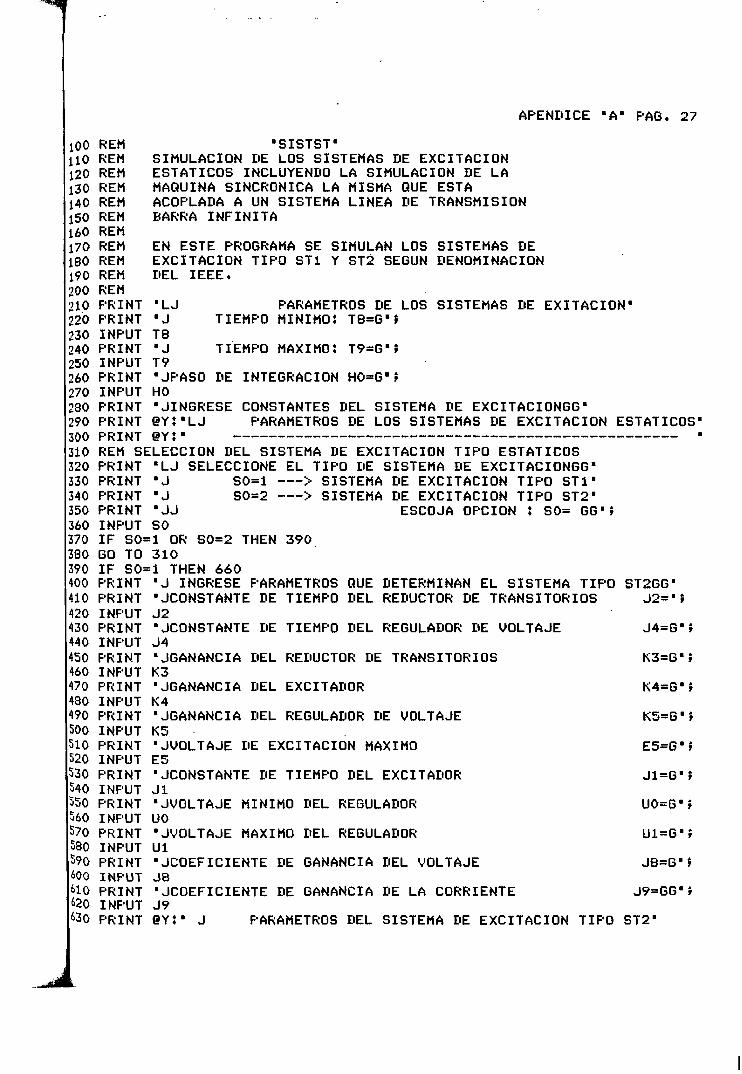
APÉNDICE "A" PAG, 27
100110120130140150160170180190200210220230240250260270280290300310320330340350360370380390400410420430440450460470480490500510520530540550560570580590600610620630
"SISTST"SIMULACIÓN DE LOS SISTEMAS DE EXCITACIÓNESTÁTICOS INCLUYENDO LA SIMULACIÓN DE LAMAQUINA SINCRÓNICA LA MISMA QUE ESTAACOPLADA A UN SISTEMA LINEA DE TRANSMISIÓNBARRA INFINITA
EN ESTE PROGRAMA SE SIMULAN LOS SISTEMAS DEEXCITACIÓN TIPO ST1 Y ST2 SEGÚN DENOMINACIÓNDEL IEEE,
•LJ•J
REMREMREMREMREMREMREMREMREMREMREMPRINTPRINTINPUT T8PRINT 'JINPUT T9PRINT 'JPASO DE INTEGRACIÓN H0=6'fINPUT HOPRINT "JINGRESE CONSTANTES DEL SISTEMA DE EXCITACIONGG'PRINT @Y:-LJ PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN ESTÁTICOS'C»C'TklT OV + • _ _ _ _ _ _ _ _ — ____________««_«....«.______________________ ir r V A F c l e l *
REM SELECCIÓN DEL SISTEMA DE EXCITACIÓN TIPO ESTÁTICOSPRINT "LJ SELECCIONE EL TIPO DE SISTEMA DE EXCITACIONGG•
J S0=l > SISTEMA DE EXCITACIÓN TIPO ST1'S0=2 > SISTEMA DE EXCITACIÓN TIPO ST2"
ESCOJA OPCIÓN } S0= GG"»
PARÁMETROS DE LOS SISTEMAS DE EXITACION'TIEMPO MÍNIMO: TB=G'Í
TIEMPO MAXIMOÍ T9=G'í
PRINTPRINTPRINT
•J• JJ
INPUT SOIF S0=l OR S0=2 THEN 390GO TO 310IF S0=l THEN 660PRINT 'J INGRESE PARÁMETROS QUE DETERMINAN EL SISTEMA TIPO ST2GG'PRINT *JCONSTANTE DE TIEMPO DEL REDUCTOR DE TRANSITORIOS J2="íINPUT J2PRINT "JCONSTANTE DE TIEMPO DEL REGULADOR DE VOLTAJE J4=G"ÍINPUT J4PRINT "JGANANCIA DEL REDUCTOR DE TRANSITORIOS K3=G"ÍINPUT K3PRINT "JGANANCIA DEL EXCITADOR K4=6'iINPUT K4PRINT 'JGANANCIA DEL REGULADOR DE VOLTAJE K5=G"»INPUT K5PRINT 'JVOLTAJE DE EXCITACIÓN MÁXIMO E5=G'ÍINPUT E5PRINT 'JCONSTANTE DE TIEMPO DEL EXCITADOR J1=G"»INPUT JlPRINT "JVOLTAJE MÍNIMO DEL REGULADOR UO=G'ÍINPUT UOPRINT 'JVOLTAJE MÁXIMO DEL REGULADOR U1=G"ÍINPUT UlPRINT -JCOEFICIENTE DE GANANCIA DEL VOLTAJE J8=G'ÍINPUT J8PRINT 'JCOEFICIENTE DE GANANCIA DE LA CORRIENTEINPUT J9PRINT (?Y:B J PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO ST2"

APÉNDICE 'A* PAG, 28
640 PRINT GY:'650 GO TO 850660 PRINT670 PRINT680 INPUT690 PRINT700 INPUT710 PRINT720 INPUT730 PRINT740 INPUT750 PRINT760 INPUT770 PRINT780 INPUT790 PRINT800 INPUT
PRINTINPUT UlPRINT GY:'PRINTPRINTPRINT
'JINGRESE PARÁMETROS QUE DETERMINAN EL SISTEMA TIPO STi'
GY:-GY:'JCONSTANTEGY4.'JCONSTANTE
PRINTPRINTPRINT
810820830840850860870880 PRINT890900910920930940950960 PRINT970 GO TO980 PRINT990 PRINT1000 PRINT1010 PRINT1020 16=01030 PRI 'JJJJJ1040 GOSUB 34201050 PRINT GY:'LJ1060 PRINT GY:'1070 PRINT GY:'J1080 PRINT GY:'J1090 PRINT GY:'J1100 IF PO=2 THEN1110 PRINT GY:-J1120 GO TO 1140uso PRINT GY:IJ1140 PRI 6Y:'JJJJ1150 PRINT GY:"J1160 PRINT GY:'JU70 PRINT 6Y: 'J
•JCONSTANTE DE TIEMPO DEL REDUCTOR DE TRANSITORIOSJ2•JCONSTANTE DE TIEMPO DEL REGULADOR DE VOLTAJEJ4•JGANANCIA DEL REDUCTOR DE TRANSITORIOSK3•JGANANCIA DEL REGULADOR DE VOLTAJEK5•JVOLTAJE MÍNIMO DEL REGULADOR Ira, etapaR8•JVOLTAJE MÁXIMO DEL REGULADOR ira. etapaR9•JVOLTAJE MÍNIMO DEL REGULADOR 2da. etapaUO•JVOLTAJE MÁXIMO DEL REGULADOR 2da, etapa
J2='
J4=G'Í
K3=G'Í
K5=G'Í
R9=G'Í
UO=G'Í
U1=G'Í
PARÁMETROS DEL SISTEMA DE EXCITACIÓN TIPO ST1'
DE TIEMPO DEL REDUCTORDE TIEMPO DEL REGULADOR
PRINT GY:'JGANANCIA DEL REDUCTORJGANANCIA DEL REGULADOR
IF S0=l THEN 980PRINT GY:'J VOLTAJE DE EXCITACIÓN MÁXIMO
GY:'JGANANCIA DEL EXCITADORGY:'JCONSTANTE DE TIEMPO DEL EXCITADORGY:'JVOLTAJE MÍNIMO DEL REGULADOR
PRINT GY:mJVOLTAJE MÁXIMO DEL REGULADORPRINT GY:'JCOEFICIENTE DE GANANCIA DEL VOLTAJE
GY:-JCOEF. DE GANANCIA DE CORRIENTE1020GY:'JVOLTAJE MÍNIMO DEL REGULADOR Ira.E.
JVOLTAJE MÁXIMO DEL REGULADOR Ira.EGY:"JVOLTAJE MÍNIMO DEL REGULADOR 2da.EGY:'JVOLTAJE MÁXIMO DEL REGULADOR 2da.E
J2='»J2J4='ÍJ4K3='»K3K5='ÍK5
E5=K4=Jl=UO=U1 =J8=
ÍE5»K4fJl»UOÍU1»J8
J9='»J9
R8='»R8R9='?R9UO='ÍUOU1='ÍU1
SE ESTA CALCULANDO CONDICIONES INICIALES'
CONDICIONES INICIALES'
TIEMPO MÍNIMO: T8='*T8TIEMPO MÁXIMO4. T9='íT9PASO DE INTEGRACIÓN: HO='»HO
1130CAMBIO BRUSCO DE.LA CARGA'
ESTADO ESTABLE'CORRIENTE DEL EJE EN CUADRATURACORRIENTE DEL EJE DIRECTOCORRIENTE DE FASECORRIENTE DE EXCITACIÓN
I2='»I2I3='ÍI3I5='ÍI5I4='»I4

APÉNDICE
11801190120012101220123012401250126012701280129013001310132013301340135013603703803904004104204304404504604704804905005105205305405505605705805906006106206306401650166016701680169017001710
TORQUE ELECTROMAGNÉTICOÁNGULO DELTAVOLTAJE DE EXCITACIÓNSALIDA DEL ESTABILIZADORVOLTAJE DE SALIDA DEL REGULADORVOLTAJE TERMINAL DEL GENERADOR
PRINT GY:*JPRINT GY:BJPRINT GY:-JPRINT GY'.'JPRINT GY:'JPRINT GY:'JDELETE VDIM V<10)V<1)=F1V(2)=F2V(3)=F3V(4)=F4V(5)=F5V(6)=V1V(7)=DV(8)=C3V(9)=C4IF S0=2 THEN 1380E6=C560 TO 1390V(10)=C5DELETE ClDIM Cl<5)
Cl<2)=13Cl<3)=15C1(4)=T1C1(5)=I416=0T2=0T3=0REM ALMACENAMIENTO DE VALORES INICIALESN2=llN5=T9/HOT2=T8DELETE U2fU3»GDIM W2(N2)»W3(N2)rG(N2>PAGEPRINT 'JJNOMBRE DEL ARCHIVO DE DATOS:GGG'ÍINPUT 0$0*='STESIS/'&0*CALL 'FILE'»H8»0*»X*IF X*=" THEN 1660PRINT 'J YA EXISTE EL ARCHIVO:'50*PRINT 'J DESEA DESTRUIR SU CONTENIDO?(Si o NoKGG'íINPUT X$IF X*='NO" THEN 1560KILL O*CRÉATE 0*»(N5+4)*9+l»0PAGEPRINT &Y:'JJ ARCHIVO:
A' PA(
Tl =D=C5=
C4=U7=
3. 29
ÍT1
ÍC5
ÍC4ÍU7
PRINT "JU2=1.0E+300U3=-W2
SE ESTA EJECUTANDO EL PROGRAMA'

APÉNDICE 'A- PAG. 30
1720 Ki=0i730 OPEN 0*»1»'U*»X*1740 CALL "REWIND'»1!750 WRITE * ! ÍN2»T8»T9»W2»W3fKli760 REM!770 G(1)=C1<1)i780 G(2)=C1(2)j790 G(3)=C1(3)1800 G(4)=C1(5)1810 G(5)=V(8)1820 G ( 6 > = V < 9 >1830 G(7)=U71840 D3=V<6)-V11850 IF S0=2 THEN 18801860 G(8)=E61870 GO TO 18901880 G<8>=V(10>1890 G(9)=C1<4)1900 G(10)=D31910 G ( 1 1 ) = V < 7 >1920 REM ALMACENAMIENTO1930 K1=K1 + 11940 WRITE *1ÍT2»G1950 FOR J=l TO N21960 W2(J)=U2(J> MIN G(J)1970 W3(J)=W3(J> MAX G(J)1980 NEXT J1990 REM EVALUAR LAS DERIVADAS POR EL MÉTODO DE RUNGE KUTTA2000 IF S0=2 THEN 20302010 N=92020 GO TO 20402030 N=102040 M=02050 DELETE P9»S12060 GOSUB 49902070 KO=RO2080 IF KOO1 THEN 27802090 V7=V6*COS<V<7»
2110 F<1)=V2*V7+P(1)*V(1>-V2*V<2)*V(6)+P(2)*V(3)2120 F(2)=V2*V84-V2*V(1)*V(6)+P(3)*V(2)+V2*FO*P(10)2130 F(3)=P<4)*V(1)+P(5)*V(3)2140 F(4>=P(6)*V(4)+V2*FO*P(11)2150 REM ECUACIONES DIFERENCIALES DEL SISTEMA TIPO ST12160 IF 80=2 THEN 25002170 F (5) =V2*E6*R3/X2+P ( 7 > *V (5) 4-V2*FO*P < 12 >2180 A9=2*H2190 F(6)=(V(2)* (P<8)*V(1)+P(9)*V(3) ) -V(1)* ( (V(2) -FO) /X) -T1>/A92200 F(7)=V2*(V(6)-1)2210 V(8)=02220 Z6==P(24)*(K3/J2)*U7+(P(24)*(K3/J2)-1/J2)*V(8)2230 F(8)=Z6+P(26)*(K3/J2)*V(9 >-P(24)*(K3/J2 > *R7-P(24)*K3/J2*H62240 D9=R7-U72250 IF ABS(D9)=>1.0E-4 THEN 2270
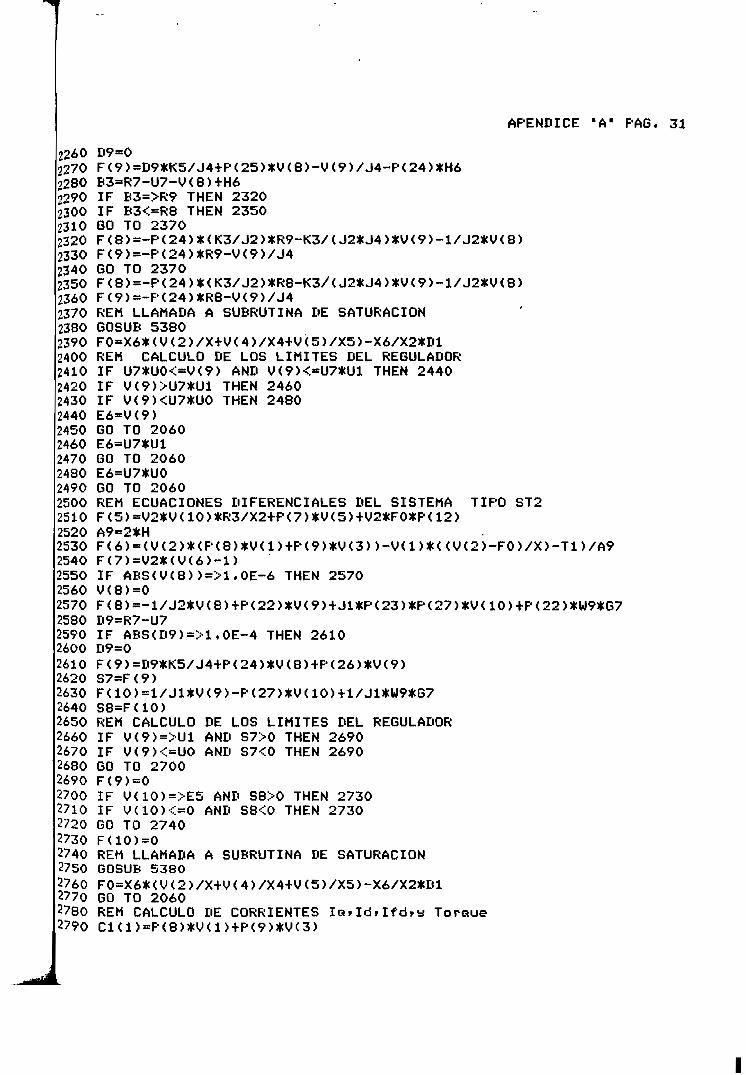
APÉNDICE 'A1 PAG. 31
D9=02270 F(9)=D9*K5/J4+P< 25)*V(8)-V < 9)/J4-P(24 > *H6J5280 B3=R7-U7-V<8>+H62290 IF B3=>R9 THEN 23202300 IF B3<=R8 THEN 23502310 GO TO 23702320 F(8)=-P(24)*(K3/J2)*R9-K3/(J2*J4>*V(9)-1/J2*V(8)2330 F(9)=-P(24)*R9-V<9)/J42340 GO TO 23702350 F(8)=-P(24)*(K3/J2)*R8-K3/(J2*J4>*V(9)-1/J2*V(8)2360 F(9)=-P<24)*R8-V(9)/J42370 REM LLAMADA A SUBRUTINA DE SATURACIÓN2380 GOSUB 53802390 FO=X6*(V(2)/X+V<4>/X4+V(5)/X5)-X6/X2*D12400 REM CALCULO DE LOS LIMITES DEL REGULADOR2410 IF U7*UOOV<9> AND V<9>OU7*U1 THEN 24402420 IF V<9»U7*U1 THEN 24602430 IF V<9XU7*UO THEN 24802440 E6=V<9>2450 GO TO 20602460 E6=U7*U12470 GO TO 20602480 E6=U7*UO2490 GO TO 20602500 REM ECUACIONES DIFERENCIALES DEL SISTEMA TIPO ST22510 F(5)=V2*V(10)*R3/X2+P(7)*V(5)+V2*FO*P(12)2520 A9=2*H2530 F(6) = (V(2)* (P(8)*V(1)+P(9)*V(3) ) -V(1)*«V(2>-FO) /X>-T1>/A92540 F(7>=V2*(V(6) -1)2550 IF ABS(V<8»=>1.0E-6 THEN 25702560 V<8)=02570 F<8)=-l/J2*V(8)+P(22)*V(9)+Jl*P(23)*P(27>*V(10)-t-P(22)*W9*G72580 D9=R7-U72590 IF ABS<D9>=>l,OE-4 THEN 26102600 D9=02610 F(9)=D9*K5/J4+P<24)*V<8>-fP(26)*V<9>2620 S7=F<9)2630 F(10)=1/J1*V(9)-P(27)*V(10)+1/J1*W9*G72640 S8=F(10)2650 REM CALCULO DE LOS LIMITES DEL REGULADOR2660 IF V(9)=>U1 AND S7>0 THEN 26902670 IF V<9K=UO AND S7<0 THEN 26902680 GO TO 27002690 F(9)=02700 IF V(10)=>E5 AND S8>0 THEN 27302710 IF V<10><=0 AND S8<0 THEN 27302720 GO TO 27402730 F<10)=02740 REM LLAMADA A SUBRUTINA DE SATURACIÓN2750 GOSUB 53802760 FO=X6*<V(2) /X+y(4) /X4+V(5) /X5)-X6/X2*Dl2770 GO TO 20602780 REM CALCULO DE CORRIENTES Iafld»lfd>« Toroue2790 C1(1)=P(8) *V(1)+P(9) *V<3>

•••"W
280028102820283028402850286028702880289029002910292029302940295029602970298029903000301030203030304030503060307030803090310031103120313031403150316031703180319032003210322032303240325032603270328032903300331033203330
APÉNDICE 'A' PAG. 32
<V<2>-FO>/XT6=V<7>+V2*T2+T3CK3)=C1(1)*COS<T6)+C1(2)*SIN<T6)L9=SGR<C1<1>*C1(1>+CH2>*C1<2>>CK4>=V<2>*CK1>-V<1>*C1<2>CK5> = <V<5>-FO>/X5IF S0=l THEN 3110REM CALCULO DEL VOLTAJE TERMINAL PARA SISTEMAS TIPO ST2C*P"M •»». ™ —» — -T — —-—• —J •••••••—•--• "<r ™ — ««J. — — — — •..•.— ...—— n.. .n ...—... i. ...-.—.„„ —
U2=P(14>*V7+1/X*(M1<1>*V<Í>+M1<2>*V<2>*V<6)+M1<3>*V<3>>U 4 = U 2 + 1 / X * < M 1 ( 4 > * V < 4 > * V < 6 > + M K 5 > * V < 5 > * V < 6 »U3=P(15)*V8+P(13)*V<10)*R3/X2+1/X*(M1(6>*V(1)*V<6)+M1<7)*V(2»U 5 = U 3 + l / X * < M l < 8 > * V < 3 ) * V < 6 > - f M H 9 > * V < 4 > + M Í < 1 0 > * V < 5 »U6=U5+Y5*(FO/X)*(P(10>*<X6/X-1)+P(11)*(X6/X4)+P(12)*(X6/X5»U7=SQR(U4*U4+U6*U6)REM CALCULO DEL VOLTAJE VEL7=J8*U7-J9*L9*SIN<B1)L8=J9*L9*COS<B1>W9=SQR < L7*L7-f L8*L8)REM CALCULO DEL FACTOR DE CARGA DEL RECTIFICADORCK5)=R3/X2*C1(5)N8=G6*C1(5)/W9IF N8<=0.433 THEN 3050IF 0,433<N8 AND N8<0,75 THEN 3070IF N8=>0*75 THEN 3090G7=1-0.58*N8GO TO 3180G7=SQR(O.75-N8*N8)GO TO 3180G7=1,732*(1-N8)GO TO 3180REM CALCULO DEL VOLTAJE TERMINAL CON SISTEMAS TIPO ST1U2=P(14>*V7+1/X*(M1(1)*V(1)+M1(2)*V(2)*V(6>+M1(3)*V(3»U4=U2+1/X*<M1(4)*V<4)*V(6)+M1(5)*V(5)*V<6»U3=P(15)*V8+P(13)*E6*R3/X2+1/X*(M1<6)*V(1)*V(6)+M1(7)*V(2))U5=U3-H/X*(M1(8)*V(3)*V(6)+M1(9)*V<4)+M1(10)*V(5»U6=U5+Y5*(FO/X)*(P(10)*(X6/X-l>+P(ll)*(X6/X4)'fP(12)*(X6/X5))U7=SQR(U4*U4+U6*U6)IF I6>0 THEN 3290IF P0=2 THEN 3290IF T2=>TO THEN 3230GO TO 3290REM DISTURBIOSGO TO PO OF 3250»3290REM INCREMENTO BRUSCO DE LA CARGAT=0,3#T1T1=T1+T16=1T3=AOIF T2<=T9 THEN 1760CALL "REWIND'flURITE *i:N2fT8fT2»W2»W3»KlCLOSEPRINT 'J DESEA SACAR RESULTADOS GRÁFICOS (Si o No>GGV

APÉNDICE "A- PAG. 33
3340 INPUT X*3350 IF X*='SI' OR X*='S" THEN 33703360 GO TO 34103370 PRINT 'J PRENDA EL GRAFIZADOR (Pulse RETURN para continuar>GG*i3380 INPUT Y*3390 REM LLAMADA A PROGRAMA PARA GRAFICACION3400 GO TO 55703410 END3420 REM SUBRUTINA DE CONDICIONES INICIALES3430 REM COEFICIENTES DE LAS ECUACIONES DIFERENCIALES3440 R=R4+R53450 Y5=Y3+T73460 X=Y4+Y53470 X7=1/(1/X1+1/X3+1/X>3480 X6=l/(l/X2-U/X4+l/X5+i/X>3490 X8=l/(l/X2-fl/X4+i/X>3500 M9=R5*(X7/X-1>3510 M8=R1*X7*X7*Y5/(X3*X3*X>3520 DELETE P3530 DIM P<29)3540 P(1>=V2*R*<X7/X-1>/X3550 P(2>=V2*R*X7/(X3*X>| 3560 P(3)=-V2*R/X(3570 P(4>=V2*R1*X7/(X3*X>¡3580 P(5>=V2*R1*(X7/X3-1>/X3¡3590 P(6>=-V2*R2/X43600 P(7)=-V2*R3/X53610 P(10)=R/X3620 P(11)=R2/X43630 P(12)=R3/X53640 REM COEFICIENTES DE LA CORRIENTE IQ3650 P(8)=(1-X7/X)/X3660 P(9>=-X7/(X3*X>3670 REM COEFICIENTES DE LA CORRIENTE ID3680 P(16)=(1-X6/X)/X3690 P(17>=-X6/(X4*X>3700 P(18)=-X6/(X5*X>3710 REM COEFICIENTES DE LA CORRIENTE IF3720 P(19)=-X6/(X5*X4)3730 P(20)=(1-X6/X5)/X53740 REM COEFICIENTES DEL VOLTAJE TERMINAL DE LA MAQUINA3750 P(13>=+Y5*X6/(X*X5>3760 P(14>=1+Y5/X*(X7/X-1>3770 P<15>=H-Y5/X*(X6/X-1>3780 REM COEFICIENTES DEL VOLTAJE TERMINAL DE LA MAQUINA3790 DELETE MI3800 DIM MI(10)¡3810 Ml(i)=Y5*R/X*(X7/X-l)*(X7/X-l)+M8+M93820 M1(2)=(X6-X7)*Y5/X3830 D5=Y5*R*X7/(X*X3)*(X7/X-1)3840 M1(3>=D5+Y5*R1*X7/(X3*X3>*(X7/X3-1)+R5*X7/X33850 M1(4)=Y5*X6/X43860 M1(5)=Y5*X6/X53870 M1(6>=Y5*(X6-X7>/X

APÉNDICE -A ' PAG. 34
3880 H1(7)=<X6/X-1)*(R5-Y5*R/X)3890 MK8)=-X7*Y5/X33900 MK9)=X6/X4*<R5-Y5*R2/X4)3910 M1<10)=X6/X5*(R5-Y5*R3/X5>3920 REM CONDICIONES INICIALES3930 Z2=R3940 V6=V33950 Z3=X+X13960 C0=22970 GO TO CO OF 3980»40003980 B1=A53990 GO TO 40104000 B1=3.141592+A54010 I5=K*COS<B1)/V34020 I9=K*SIN<B1)/V34030 I1=SQR(I5*I5+I9*I9)4040 REM PARTE REAL DEL VOLTAJE E4050 Y1=V34060 Zl=04070 E1=Y1-Z2*I5+Z3*I94080 REM PARTE IMAGINARIA DEL VOLTAJE E4090 E2=Z1-Z2*I9-Z3*I54100 E=SGR<E1*E1+E2*E2)4110 D=ATN(E2/E1)4120 I2=I1*SIN(B1-D+1.570796)4130 I3=I1*COS(B1-D+1.570796)4140 I4=(E-(X2-X1)*I3)/X24150 F1=<X1+X)*I24160 F3=X1*I24170 FO=X2*(I3+I4)4180 F2=X*I3+FO4190 F4=FO4200 REM LLAMADA A SUBRUTINA DE SATURACIÓN4210 GOSUB 53804220 I4=(FO-fDl)/X2-I34230 F5=X5*I4+FO4240 T1=F2*(P(8)*FH-P(9)*F3)-F1*(F2-FO)/X4250 V5=R3*I44260 REM CALCULO DEL VOLTAJE INICIAL DE LA MAQUINA4270 V7=V6*COS(D)4280 V8=V6*SIN(D)4290 U2=P(14)*V7+1/X*<M1(1)*F1+M1(2)*F2*VH-M1(3)*F3)4300 U4=U2-H/X*<M1(4)*F4*VH-M1(5)*F5*V1)4310 U3=P(15)*V8+P(13)*V5-fl/X*(Ml(6>*Fl*vH-Ml(7>*F2)4320 U5=U3+1/X*(M1(8)*F3*V1+M1(9)*F4-I-M1<10)*F5)4330 U6=U5+Y5*(FO/X)*(P(10)*(X6/X-l)-fP(ll)*X6/X4+P(12)*X6/X5)4340 U7=SQR(U4*U4+U6*U6)4350 IF S0=2 THEN 44004360 K5=K54370 R8=R84380 R9=R94390 GO TO 44904400 K5=K5/U14410 K4=K4/U1

APÉNDICE 'A' PAG. 35
4420 J1=J1/U14430 J8=J8/U14440 J9=J9/U14450 E5=E5/U14460 UO=UO/U14470 U1=U1/U14480 IF S0=2 THEN 45904490 P(21)=04500 P(22>=04510 P(23)=04520 P(24)=-K5/J44530 P<25>=-K5/J44540 P<26)=-1/J44550 P(27)=04560 P<28)=04570 P<29>=04580 GO TO 46804590 P(21)=04600 P<22)=K3/<J1*J2>4610 P(23)=-<K3/(J1*J2»4620 P<24>=-K5/J44630 P<25>=-K5/J44640 P(26)=-1/J44650 P(27)=K4/Ji4660 P(28)=1/J14670 P(29)=04680 REh CONDICIONES INICIALES DEL SISTEMA DE EXCITACIÓN4690 REM CONDICIONES INICIALES DEL SISTEMA TIPO ST14700 IF S0=2 THEN 47904710 E6=V5*X2/R34720 C3=04730 C4=V5*X2/R34740 C5=C44750 R7=U74760 H6=C5/K54770 GO TO 49804780 REM CONDICIONES INICIALES DEL SISTEMA TIPO ST24790 C3=04800 C4=04810 C5=V5*X2/R34820 I4=I4*R3/X24830 R7=U74840 L7=J8*U7-J9*I1*SIN(B1)4850 L8=J9*I1*COS<B1>4860 U9=SQR(L7*L7-fL8*L8)4870 REM CONDICIONES INICIALES DEL EFECTO DE REGULACIÓN DEL REGULADOR
ftQ/% OCTM ____ — _ — ___« — «.« — «««. — «.—.«.«___««_ — — —._ — __.-»____.«_ — .-..— —..- — — —,.-._.«..«—. — — .— —•ocjv rvtn — — — — — — __ — — — — — — — — — — — — « — — — — « — - - — —__ — _—.—.
890 G7=C5/(1.2*W9)900 IF 0.75<G7 AND 67<=1 THEN 49304910 IF 0,433<=G7 AND G7<=0,75 THEN 49500 IF 0<=G7 AND G7<0,433 THEN 4970
1930 G6=W9*C1-G7>/<0.58*14)'940 GO TO 49804950 G6=SQR(0,75-G7*G7)*W9/I4
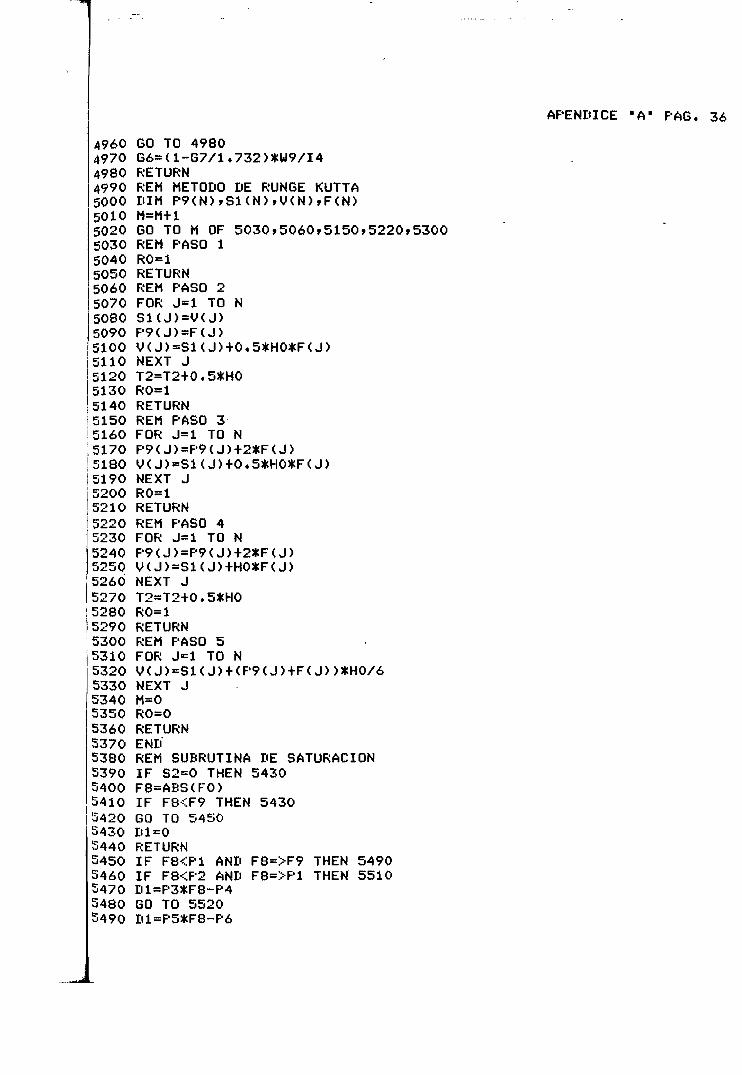
APÉNDICE 'Am PAG. 36
4960 GO TO 49804970 G6=<1-G7/1«732>*W9/I44980 RETURN4990 REM MÉTODO DE RUNGE KUTTA5000 DIH P9(N)>S1(N)»V<N)»F<N)5010 M=M+15020 GO TO M OF 5030»5060»5150»5220»53005030 REM PASO 15040 R0=l5050 RETURN5060 REM PASO 25070 FOR J=l TO N5080 SKJ)=V(J)5090 P9(J)=F<J>5100 V(J)=S1(J)+0,5*HO*F(J>5110 NEXT J5120 T2=T2+0.5*HO5130 R0=l5140 RETURN5150 REM PASO 35160 FOR J=l TO N5170 P9<J>=P9<J>+2*F(J>
I 5180 V(J)=S1(J)+0«5*HO*F(J)Í5190 NEXT J|5200 R0=l¡5210 RETURN'5220 REM PASO 45230 FOR J=l TO N5240 P9(J)=P9(J)+2*F(J)5250 V<J>=SKJ>+HO*F<J>5260 NEXT J5270 T2=T2+0.5*HO5280 R0=l5290 RETURN15300 REM PASO 515310 FOR J=l TO N5320 V<J>=SKJ> + <P9<J>+F<J»*HO/65330 NEXT J5340 M=05350 R0=05360 RETURN5370 END5380 REM SUBRUTINA DE SATURACIÓN5390 IF S2=0 THEN 54305400 F8=ABS(FO)5410 IF F8<F9 THEN 54305420 GO TO 54505430 Dl=05440 RETURN5450 IF F8<P1 AND F8=>F9 THEN 54905460 IF F8<P2 AND F8=>P1 THEN 55105470 Di=P3*F8-P45480 60 TO 55205490 D1=P5*F8-P6

APÉNDICE 'A' PAG, 37
5500 GO TO 55205510 D1=P7*F8-P85520 IF F0<0 THEN 5550
i 5530 Di=Dl!5540 RETURN5550 D1=-D15560 RETURN5570 DELETE 1201»82195580 Z9=MEMORY5590 APPEND 'GRÁFICOS1i56005600 REM LINEA DE CARGA DE PROGRAMAS
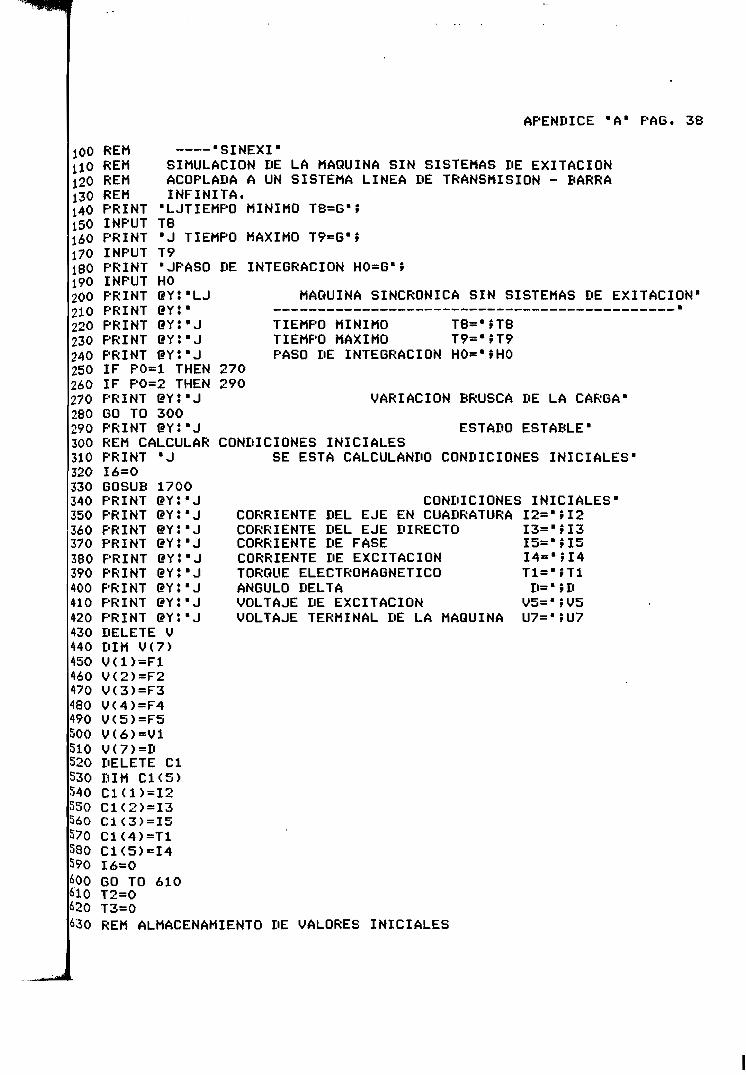
APÉNDICE 'A' PAG. 38
iOO REM110 REM!20 REM130 REMi40 PRINT150 INPUTláO PRINT170 INPUT180 PRINT190 INPUT200 PRINT
220230240250260270280290300310320330340350360370380390400410420
'SINEXI'SIMULACIÓN DE LA MAQUINA SIN SISTEMAS DE EXITACIONACOPLADA A UN SISTEMA LINEA DE TRANSMISIÓN - BARRAINFINITA.
•LJTIEMPO MÍNIMO T8=G'ÍT8•J TIEMPO MÁXIMO T9=G'ÍT9•JPASO DE INTEGRACIÓN HO=G'ÍHOBYt'LJBYÍ'BYfJ TIEMPO MÍNIMO T8='ÍT86Y:"J TIEMPO MÁXIMO T9="»T9
PASO DE INTEGRACIÓN HO='»HO
MAQUINA SINCRÓNICA SIN SISTEMAS DE EXITACION"
PRINTPRINT 6Y:"JPRINT BYfJIF P0=l THEN 270IF P0=2 THEN 290PRINT BYfJGO TO 300PRINT BYJ'JREM CALCULAR CONDICIONES
VARIACIÓN BRUSCA DE LA CARGA
ESTADO ESTABLE'INICIALES
BY:BY:
BY:BY:BYÍBY:
jjj'jjjjj
PRINT "J16=0GOSUB 1700PRINT BY:'PRINTPRINTPRINT BYPRINT BYPRINTPRINTPRINTPRINT
430 DELETE V440 DIM V(7)450 V(1)=F1460 V(2)=F2470 V(3)=F3480 V(4)=F4490 V(5)=F5500 V(6)=V1510 V(7)=D520 DELETE Cl530 DIM CK5)540 C1(1)=I2550 C1(2)=I3560 C1(3)=I5570 C1(4)=T1580 C1(5)=I4590 16=0600 GO TO 610
T2=0620 T3=0630 REM ALMACENAMIENTO DE VALORES
SE ESTA CALCULANDO CONDICIONES INICIALES"
CONDICIONES INICIALES-CORRIENTE DEL EJE EN CUADRATURA 12=CORRIENTE DEL EJE DIRECTO 13=CORRIENTE DE FASE 15=CORRIENTE DE EXCITACIÓN 14=TORQUE ELECTROMAGNÉTICO Tl=ÁNGULO DELTA D=VOLTAJE DE EXCITACIÓN V5=VOLTAJE TERMINAL DE LA MAQUINA U7=
»I2ÍI3ÍI5ÍI4»T1rDÍV5ÍU7
INICIALES

APÉNDICE "A" PAG. 39
640 N2=10650 N5=T9/HO660 T2=T8670 DELETE W2»W3»G680 DIM U2<N2)fU3<N2)fG(N2)690 PAGE700 PRINT "JJNOMBRE DEL ARCHIVO DE DATOStGGG'í710 INPUT O*720 0*='BTESIS/"SO*730 CALL 'FILE'fH8»0*»X*740 IF X*=" THEN 800750 PRINT "J YA EXISTE EL ARCHIVO:'ÍO*760 PRINT 'J DESEA DESTRUIR SU CONTENIDO?(Si o NoKGG'í770 INPUT X*780 IF X*='NO' THEN 700790 KILL O*800 CRÉATE Otí<N5+4>*9+l,0810 PAGE820 PRINT eYt'JJ ARCHIVO ffO*830 PRINT "J SE ESTA EJECUTANDO EL PROGRAMA'840 W2=1.0E+300850 W3=-W2860 Kl=0870 OPEN 0*íl»'U'»X*880 CALL 'REWIND'»!890 WRITE *i:N2»T8»T9tW2rW3»Kl900 REM910 G(1)=C1(1>920 G(2)=C1(2>930 G<3)=C1<3)940 G(4)=C1(5)950 G(5)=V<1)960 G(6)=V(2)970 G(7)=V(7)980 G(8>=C1(4)990 D3=V(6)-V11000 G(9)=D31010 G(10)=U71020 REM ALMACENAMIENTO1030 K1=K1+11040 URITE *1JT2»G1050 FOR J=l TO N21060 W2(J>=W2(J) MIN G(J)1070 W3(J)=W3<J) MAX G<J)1080 NEXT J1090 REM EVALUAR LAS DERIVADAS POR EL MÉTODO DE RUNGE KUTTA1100 N=71110 M=01120 DELETE P9»S11130 GOSUB 26401140 KO=RO1150 IF KOO1 THEN 13101160 V7=V6*COS(V(7»1170 V8=V6*SIN(V(7))

APÉNDICE 'A" PAG. 40
R0 F(1>=V2*V7+P(1)*V(1)-V2*V(2)*V(6>+P(2>*V(3>< PO F ( 2 > =V2*V8+V2*V (1) *V ( 6 ) +P (3 > *V (2 > + V2*FO*P (10 )oAO F<3)=P(4>*V(1>+P(5)*V(3)910 F(4)=P(6)*V(4)+V2*FO*P(11>o70 F < 5 >=V2*V5+P(7)*V(5)+V2*FO*P(12)230 A9=2*H
*240 F(6> = (V(2)*(P(8)*V(1>+P(9)*V(3»-V(1)*((V(2)-FO)/X)-T1)/A9050 F(7)=V2*(V(6>-1)
Í^AO REM LLAMAR SUBRUTINA PARA SATURACIÓN;70 GOSUB 3040J;80 FO=X6*(V(2)/X+V(4>/X4+V(5)/X5>-X6/X2*D1290 GO TO 1130
«300 REM CALCULAR LAS CORRIENTES IQ»ID,IFD Y TORQUEÍ310 CK1>=P<8)*V(1>+P(9>*V(3>Í39Q CK2> = (V(2>-FO)/X330 T6=V(7>+V2*T2+T3340 C1(3)=C1(1)*COS(T6)+C1(2)*SIN(T6)350 CK4)=V(2)*C1(1)-V(1)*C1(2)1360 C1(5) = (V(5>-FO)/X5[370 REM CALCULO DEL VOLTAJE TERMINAL DE LA MAQUINA
J1380 REM1390 U2=P(14)*V7+1/X*(M1(1)*V(1)4-M1(2)*V(2)*V(6)+M1(3)*V(3))1400 U4=U2+1/X*(M1(4)*V(4)*V(6)+M1(5)*V(5)*V(6))1410 U3=P(15)*V8+P(13)*V5+1/X*(M1(6)*V(1)*V(6)+M1(7)*V(2))1420 U5=U3+1/X*(M1(8)*V(3)*V(6)+M1(9)*V(4)+M1(10)*V(5))1430 U6=U5+Y5*(FO/X)*(P(10)*(X6/X-1)+P(11)*(X6/X4)+P(12)*(X6/X5»1440 U7=SQR(U4*U4+U6*U6)1450 IF I6>0 THEN 15601460 IF P0=2 THEN 15601470 IF T2=>TO THEN 15001480 GO TO 15601490 REM DISTURBIOS1500 GO TO PO OF 1520*15601510 REM PROVOCAR INCREMENTO BRUSCO DE LA CARGA1520 T=0.3*T11530 T1=T1+T1540 16=11550 T3=AO1560 IF T2<=T9 THEN 9001570 CALL "REWIND'fl1580 WRITE * i :N2»T8»T2»W2»W3»Kl1590 CLOSE1600 REM LLAMADA A SUBRUTINA PARA GRAFICACION1610 PRINT "JDESEA SACAR RESULTADOS GRÁFICOS (Si o No)? GG'í1620 INPUT X*1630 IF X*='SI' OR X$='S' THEN 16501640 GO TO 16901650 PRINT 'J PRENDA EL GRAFIZADOR (Pulse RETURN psrs continu3r)GG'í1660 INPUT Y*1670 GO TO 3230!680 GO TO 32301690 END1?00 REM SUBRUTINA DE CONDICIONES INICIALES1710 REM COEFICIENTES DE LAS ECUACIONES DIFERENCIALES

"" ^P|B
APÉNDICE -A' PAG. 41
172017301740175017601770178017901800181018201830184018501860187018801890190019101920193019401950196019701980199020002010202020302040!20502060(2070| 2080I 2090! 2100211021202130214021502160¡2170| 2180¡ 2190! 220022102220223022402250
R=R4+R5Y5=Y3+T7X=Y4-fY5X7=1/(1/X1+1/X3+1/X)X6=1/U/X2+1/X4+1/X5+1/X>X8=l/(1/X2+1/X4+1/X)M9=R5*(X7/X-1>M8=R1*X7*X7*Y5/(X3*X3*X)DELETE PDIM P(20)P(1)=V2*R*(X7/X-1)/XP(2)=V2*R*X7/(X3*X)P<3>=-V2*R/XP(4)=V2*R1*X7/(X3*X)P(5)=V2*R1*(X7/X3-1)/X3P(6)=-V2*R2/X4P<7>=-V2*R3/X5P<10>=R/XP(11)=R2/X4P(12)=R3/X5REM COEFICIENTES DE LA CORRIENTE IQP(8)=(1-X7/X)/XP(9>=-X7/(X3*X)REM COEFICIENTES DE LA CORRIENTE IDP(16)=(1-X6/X)/XP(17)=-X6/(X4*X)P(18)=-X6/(X5*X)REM COEFICIENTES DE LA CORRIENTE IFP<19>=-X6/<X5*X4>P<20)=(1-X6/X5)/X5REM COEFICIENTES DEL VOLTAJE TERMINAL DE LA MAQUINAP(13)=Y5*X6/< X*X5)P(14)=H-Y5/X*(X7/X-1)P(15)=1+Y5/X*<X6/X-1)DELETE MIDIM MK10)MI(1)=Y5*R/X*(X7/X-1)*(X7/X-1)+M8+M9M1(2)=(X6-X7)*Y5/XD5=Y5*R*X7/(X*X3)*(X7/X-1)M I < 3)=D5+Y5*R1*X7/(X3*X3)*(X7/X3-1> +R5*X7/X3MK4)=Y5*X6/X4M1(5>=Y5*X6/X5M1(6)=Y5*(X6-X7)/XMK7) = (X6/X-1)*(R5-Y5*R/X)M1(8)=-X7*Y5/X3MI (9)=X6/X4*(R5-Y5*R2/X4 >M1<10 > =X6/X5* < R5-Y5*R3/X5)REMREM CONDICIONES INICIALESZ2=RZ3=X+X1V6=V3C0=260 TO CO OF 2260»2280
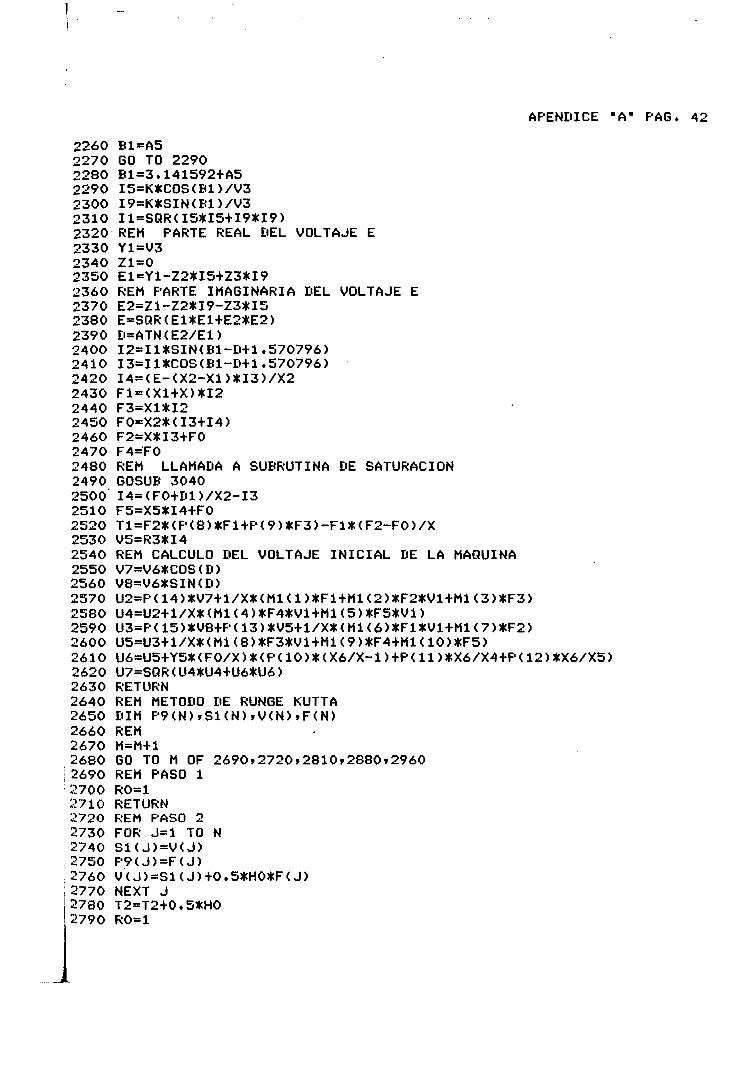
APÉNDICE "A' PAG» 42
2260 B1*=A52270 60 TO 22902280 B1=3.141592+A52290 I5=K*COS<B1)/V32300 I9=K*SIN<B1>/V32310 I1=SQR(15*15+19*19)2320 REM PARTE REAL DEL VOLTAJE E2330 Y1=V32340 Zl=02350 E1=Y1-Z2*I5+Z3*I92360 REM PARTE IMAGINARIA DEL VOLTAJE E2370 E2=Z1-Z2*I9-Z3*I52380 E=SGR<E1*E1+E2*E2)2390 D=ATN<E2/E1>2400 I2=I1*SIN<B1-D+1,570796)2410 I3=I1*COS<B1-D+1.570796)2420 I4=(E-(X2-X1)*I3)/X22430 F1=(X1+X)*I22440 F3=X1*I22450 FO=X2*(13+14)2460 F2=X*I3+FO2470 F4=FO2480 REM LLAMADA A SUBRUTINA DE SATURACIÓN2490 GOSUB 30402500 I4=(FO+D1)/X2-I32510 F5=X5*I4+FO2520 T1=F2*<P(8)*F1+P(9)*F3)-F1*(F2-FO)/X2530 V5=R3*I42540 REM CALCULO DEL VOLTAJE INICIAL DE LA MAQUINA2550 V7=V6*COS(D)2560 V8=V6*SIN(D)2570 U2=P<14)*V7+1/X*(M1(1)*F1+M1(2)*F2*V1+MK3)*F3)2580 U4=U2+1/X*(M1(4)*F4*V1+M1(5)*F5*V1)2590 U3=P(15)*V8+P(13)*V5+1/X*(M1(6)*F1*V1+M1(7)*F2)2600 U5=U3+1/X*(M1(8)*F3*V1+M1<9)*F4+M1(10)*F5)2610 U6=U5+Y5*(FO/X)*(P<10>*(X6/X-1)+P(11)*X6/X4+P(12)*X6/X5>2620 U7=SQR(U4*U4+U6*U6)2630 RETURN2640 REM MÉTODO DE RUNGE KUTTA2650 DIM P9(N)»S1(N)»V(N)»F<N)2660 REM2670 M=M+12680 GO TO M OF 2690»2720,2810*2880,29602690 REM PASO 12700 R0=l2710 RETURN272O REM PASO 22730 FOR J=l TO N2740 SKJ)=V(J)2750 P9(J)=F(J)2760 V(J)=S1(J)+0.5*HO*F(J)2770 NEXT J2780 T2=T2+0.5*HO2790 R0=l

APÉNDICE 'A' PAG, 43
i 2800 RETURNI 2810 REM PASO 3Í2820 FOR J=l TO Ní2830 P9<J>=P9<J>+2*F<J>¡2840 V(J)=SKJ)+0«5*HO*F(J)2850 NEXT J2860 R0=l2870 RETURN2880 REM PASO 4|2890 FOR J=l TO Ni 2900 P9(J)=P9(J)+2*F(J)2910 y<J)=SKJ)+HO*F<J)2920 NEXT J2930 T2=T2+0«5*HO2940 R0=l2950 RETURN2960 REM PASO 52970 FOR J=l TO N2980 V(J)=Sl(J) + (P9(J)+F(J»*HO/62990 NEXT J3000 M-0Í3010 R0=03020 RETURN3030 END3040 REM SUBRUTINA DE SATURACIÓN3050 IF S2=0 THEN 30903060 F8=ABS(FO)¡3070 IF F8<F9 THEN 3090i 3080 GO TO 311013090 Dl=03100 RETURN3110 IF F8<P1 AND F8=>F9 THEN 3150Í3120 IF F8<P2 AND F8=>P1 THEN 317013130 D1=P3*F8-P4;3140 GO TO 3180| 3150 D1=P5*F8-P6¡3160 GO TO 318013170 D1=P7*F8-P813180 IF F0<0 THEN 32103190 D1-D13200 RETURN3210 D1=-D13220 RETURN3230 DELETE 1201»64793240 Z9=MEMORY3250 APPEND 'GRÁFICOS'»3260¡3260 REM SE CARGA EL PROGRAMA PARA GRÁFICOS

APÉNDICE 'A1 PAG, 44
GG1
(O o DGG'Í
| 100 REM110 REM «««GRÁFICOS***120 PRINT 'LJJ GRÁFICOS'130 PRINT 'JJ NOMBRE DEL ARCHIVO DE DATOS?140 INPUT O*150 0*='eTESIS/'*0*160 PRINT 'JUNIDAD DONDE ESTA EL DISCO DE DATOS?170 INPUT H7!180 CALL 'FILE'»H7fO*»X*190 IF X*O" THEN 220200 PRINT 'J NO EXISTE ESTE NOMBRE DE ARCHIVO!•Í0*í'REVISEGG1
! 210 GO TO 120220 PAGE230 OPEN 0*»lf'R'»X*240 READ *1ÍN2
i 250 DELETE XfYfGi 260 DIM X<N2+1>»Y<N2+1>>G<N2>!270 FOR J=l TO N2+11280 X(J)=0290 Y(J)=0300 NEXT J310 READ tlíKl320 FOR J=l TO Kl330 FOR L=l TO N2+13.40 READ *1ÍT2350 IF LON2 THEN 370360 T2=-T2.370 IF X(L)=>T2 THEN 390;380 X(L)=T2390 IF Y<LX=T2 THEN 410¡400 Y(L)=T2¡410 NEXT L1420 READ *i:T2430 NEXT J440 CLOSE 1450 GO TO S9 OF 460»460»460f610460 PRINT 'JJ 1.- Corriente en el eje G'470 PRINT 'J 2,- Corriente en el eJe D'i480 PRINT 'J 3.- Corriente de fase1;490 PRINT 'J 4«- Corriente de excitación1J500 PRINT "J 5«- Realimentacion del voltaje de excitación*510 PRINT 'J 6.- Salida del regulador"520 PRINT 'J 7.- Voltaje terminal del generador'¡530 PRINT 'J 84- Voltaje de excitación'!540 PRINT 'J 9.- Toroue electrotnaánetico''550 PRINT 'J 1Ü4- Desviación de la velocidad rotórica"^560 PRINT 'J 11.- Ángulo delta'¡570 PRINT 'JJ ESCOJA OPCIONGG'Í¡580 INPUT N3 .590 IF N3<=N2 AND N3=>1 THEN 750600 GO TO 570610 PRINT 'J 1.- Corriente en el eJe Q'620 PRINT 'J 2,- Corriente en el eJe D'630 PRINT 'J 3*- Corriente de fase'

640 PRINT650 PRINT
680 PRINT "J 8,690 PRINT "J 9,700 PRINT "J10,710 PRINT "JJ
APÉNDICE "A" PAG, 45
•J 4»- Corriente de excitación""J 5«- FluJo en el eJe G"
660 PRINT 'J 6.- FluJo en el eJe D"670 PRINT "J 7,- Anáulo delta"
Toroue elctromasnetico"Desviación de la velocidad rotórica*Voltaje terminal del generador"
ESCOJA OPCIONGG "íI 720 INPUT N31730 IF N3<=N2 AND N3=>1 THEN 750740 GO TO 710750 PRINT "L"7óO OPEN 0*Íl»"R"fX*770 DELETE W2»W3»G780 READ *11N2790 DIM W2<N2>»W3<N2)fG(N2)800 READ *i:T8»T2»W2»U3»Kl810 CLOSE 1¡820 PACE830 PRINT "JJJ HAY"*K1*"PUNTOS PARA EL GRÁFICO"840 PRINT "JJ850 PRINT "860 PRINT "JJ870 PRINT "880 PRINT "JJ890 PRINT "900 INPUT W7>W4910 PRINT "¡920 INPUT W5»W6¡930 PRINT "JJ¡940 PRINT "J950 INPUT Gl960 PRINT "J970 INPUT G2980 PRINT "JJ990 INPUT G3»Q41000 PRINT "L DESEA IMPRESIÓN EN PAPEL (Si o No)GGG"1010 INPUT A*1020 IF A*="SI" OR A*="S" THEN 10701030 H7=32
Í1040 X9=0.8*2,328¡1050 Y9=0.8*3.072¡1060 GO TO 1120U070 PRINT 'L PREPARE EL GRAFIZADOR Pulse (RETURN) para continuare1
U080 INPUT X*1090 H7=l1100 X9=048*1.792
11110 Y9=0.8*2.816¡1120 PRINT ei»17ÍX9»Y91130 Q5=(W4-W7)/G1+11140 Q6=(W6-W5>/Q2+11150 PRINT "JJ TITULO DEL GRAFICOG "í1160 INPUT A*1170 PRINT "JJ VARIABLE QUE SE GRAFIZA EN EL EJE YG "í
TIEMPO MIN,'."?T8TIEMPO MAX.:*ÍT2PARÁMETROS PARA EL WINDOW"EN EL EJE XTG'Í
EN EL EJE Y?G"Í
INTERVALO ENTRE MARCAS"EN EL EJE X ?G"Í
COORDENADAS DEL ORIGEN: G

APÉNDICE 'A' PAG. 46
1180 INPUT S*1190 PAGE1200 GOSUB 22301210 OPEN 0*Í1»*R1220 READ *ltN2»T8»T9»W2»W3>Kl1230 READ *ltT2fG1240 MOVE BH7:T2fG(N3)1250 FOR J=2 TO Kl1260 READ *1JT2»G1270 DRAW eH7tT2»G(N3)1280 NEXT J1290 GO TO 13001300 GLOSE 11310 GOSUB 22301320 MOVE 6H7:W7»W51330 FOR J=l TO Q51340 DRAW eH7:W7-KJ-l)*Ql»W51350 SCALE Ifl1360 RDRAU (?H7:Ofl1370 Y*=STR<W7-KJ-1)*QÍ>1380 Y*=REPC •»!»!>1390 RMOVE eH7:-LEN<Y*)/2*X9»-1.5*Y91400 PRINT GH7JY*»1410 GOSUB 22301420 MOVE eH7ÍW7+<J-l)*01»W51430 NEXT J1440 MOVE 6H7ÍW7»W51450 FOR J=l TO 061460 DRAW eH7ÍW7»W5+(J-l)*Q21470 SCALE 1»!1480 RDRAW eH7:irO1490 Y*=STR<W5+(J-1)*Q2)1500 Y*=REP< "»1»1)1510 RMOVE eH7:-Y9»-LEN(Y*)/2*X91520 PRINT B1»25Í901530 PRINT BH7:Y*f1540 PRINT 61»25ÍO1550 GOSUB 22301560 MOVE eH7:W7fW5+<J-l)*Q21570 NEXT J1580 AXIS 6H7:QlfQ2fW4fW61590 A8=LEN(A»)1600 A7=-A8/2*X91610 MOVE eH7:(W7+W4)/2»W61620 SCALE 1»!1630 RMOVE @H7ÍA7»3*Y91640 PRINT eH7tA*í1650 GOSUB 22301660 MOVE 6H7:<W7+W4>/2»W61670 SCALE 1»!1680 RMOVE <?H7:A7»2.1*Y91690 FOR J=l TO A81700 PRINT 6H7Í'=•»1710 NEXT J

APÉNDICE 'A' PAG, 47
1720 GOSUB 22301730 R*='TIEMPO (se*)'1740 MOVE eH7:(W7+W4)/2»W51750 SCALE 1»!1760 RMOVE GH7:-LEN(R*)/2*X9»-3.5*Y91770 PRINT 6H7:R*1780 GOSUB 22301790 R*=S*1800 MOVE 6H7 í W7 »(W5+W6)/21810 SCALE 1»!1820 RMOVE eH7í-3,2*Y9»-LEN(R*)/2*X91830 PRINT Bl»25t901840 PRINT 6H7:R*1850 PRINT 61»25ÍO1860 GOSUB 22301870 MOVE &H7:W7»W61880 PRINT 'JJ DESEA PONER TÍTULOS (Si o No) i G'»1890 INPUT C*1900 IF C*='NO' OR C*='N' THEN 21601910 PRINT 'JJ PONGA EL TITULOtG'»1920 INPUT D*1930 PRINT 'JJ DIRECCIÓN DE ESCRITURA REFERIDA AL EJE XtG'1940 PRINT 'J 1 > LADO INFERIOR'1950 PRINT 'J 2 > LADO LATERAL IZQUIERDO'1960 PRINT 'JJ ESCOJA ÍG"»1970 INPUT NO1980 A6=-LEN(D*)/2*X91990 GOSUB 22302000 GO TO NO OF 2060»20102010 MOVE @H7:W7»(W5+W6)/22020 SCALE 1»!2030 RMOVE 6H7Í-6*Y9»A62040 PRINT 61»25:902050 GO TO 20902060 MOVE eH7Í(W7+W4)/2»W52070 SCALE 1»!2080 RMOVE @H7tA6»-6.3*Y92090 PRINT @H7ÍD*Í2100 PRINT ei»25tO2110 GOSUB 2230
í 2120 MOVE eH7tW7»W6i 2130 PRINT 'JJDESEA PONER TÍTULOS (Si o NoMG'í2140 INPUT C*2150 IF C*='SI' OR C*='S' THEN 19102160 GOSUB 223012170 MOVE @H7tW7»W6¡2180 PRINT "LJJ DESEA OTRO GRÁFICO ?G'fi 2190 INPUT R*2200 IF R*='SI' OR R*='S' THEN 22202210 END2220 GO TO S9 OF 460»460»460»6102230 REM SUBRUTINA DE WINDOW Y VIEPORT2240 IF H7=32 THEN 22702250 VIEUPORT 15»140»15»90

APÉNDICE "A" PAG, 48
2260 GO TO 22802270 VIEWPORT 20>120»20»902280 WINDOW W7»W4»W5»W62290 RETURN

APÉNDICE "B" PAG. 1
A P É N D I C E B
MANUAL DE USO DEL PROGRAMA
Permite a la persona interesada en la utilización de este traba^
jo su correcto manejo y fácil ejecución. El programa está estructurado
de tal manera que el usuario seleccione las condiciones en que se desea
se desarrolle el programa.
El computador que se utiliza es el mi ni computador Tektronix 4051,
impresor 4641 y grafizador Tektronix 4662. El computador tiene 3 unida^
des de discos de las cuales se utilizan las unidades (O ó 1).
El proceso a seguirse para la utilización del computador y del
respectivo, programa es el siguiente:
PROCESO
1. Prender el equipo en el siguiente orden:
- Unidad de disco superior
- Unidad de disco inferior
- Computador
Si el orden en que se ha encendido está bien realizado la señaliza-
ción del "CLOCK" queda encendida.
2. Inicial i zar el reloj del sistema por medio de la sentencia:
CALL"SETTIM","DD-MMM-AA|áHH:MM:SS"

APÉNDICE "B" PAG. 2
Donde: DD = Día (en números)
MMM = Mes (tres primeras letras del mes en el idioma inglés)
AA = Año (dos últimos dígitos)
HH = Horas (O - 24)
MM = Minutos (O - 60)
SS = Segundos (O - 60)
Una vez ejecutada esta sentencia la señalización del reloj se apaga.
3. Colocar el disco y llamar la información:
CALL"MOUNT",N,X$
Donde: N = unidad donde está colocado el disco de programa (O ó 1).
4. Informar al computador la unidad donde se colocó el disco:
UNIT (O ó 1).
5. Traer la información de la unidad de discos al computador:
OLD"TESIS"
Donde: TESIS = Nombre que se le ha puesto al programa maestro.
6. Para ejecutar el programa se escribe la sentencia RUN.
Para entender el manejo del programa, a continuación se da un ejem
pío demostrativos.
OLD"TESIS"
(Pulse tecla Return)

APÉNDICE "B" PAG. 3
RUN
Unidad donde está el diskette? (O o 1) O
(Pulse tecla Return)
BLOQUE DE SELECCIÓN
Tecla #1 — > Reiniciar el programa
Tecla #2 — > Ingreso de datos
Tecla #3 — > Resultados gráficos
ESCOJA LA TECLA:
(Pulso la tecla # 2)
SELECCIÓN PARA EL INGRESO DE DATOS
03 = 1 — > Ingreso de datos desde el operador
03 = 2 — > Ingreso de datos desde archivo
ESCOJA OPCIÓN: 03 = 2 (Return)
Ingrese nombre del archivo de datos: PARAGEN (Return)
Ingrese condiciones de funcionamiento
S2 = O — > Generador modelo no saturado
S2 = 1 — > Generador modelo saturado
ESCOJA OPCIÓN S2 = 1 (Return)
Ingrese perturbaciones
PO = 1 — > Incremento brusco de la carga
PO = 2 — > Estado estable
i
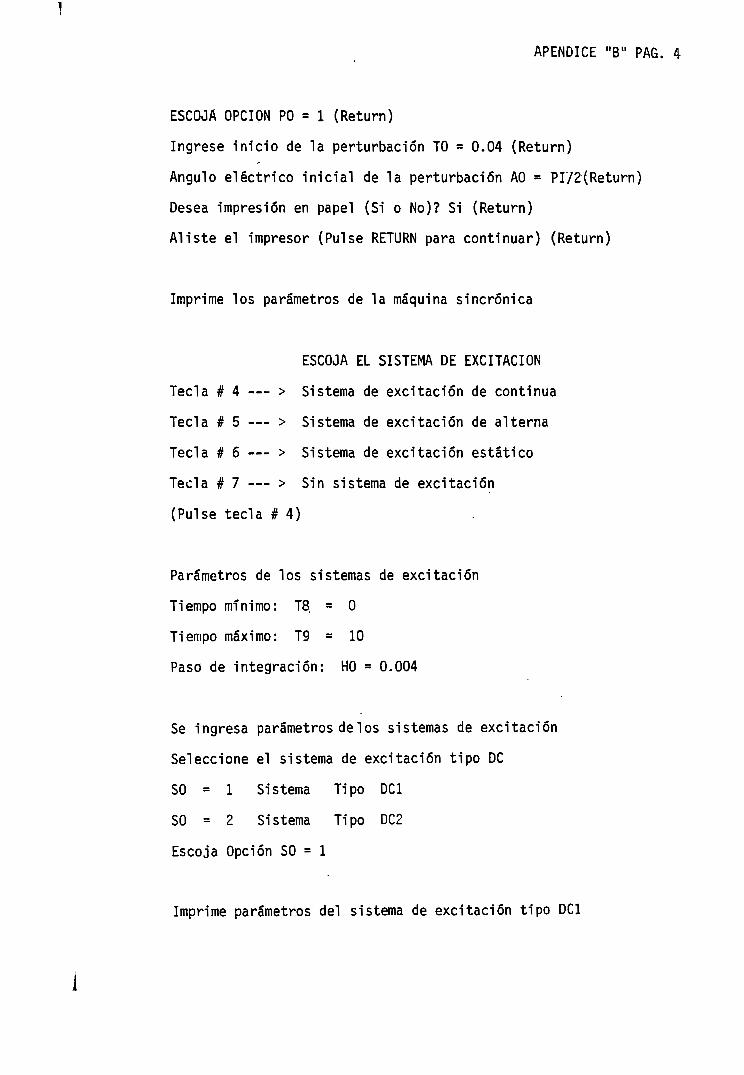
APÉNDICE "B" PAG. 4
ESCOJA OPCIÓN PO = 1 (Return)
Ingrese inicio de la perturbación TO = 0.04 (Return)
Ángulo eléctrico inicial de la perturbación AO = PI/2(Return)
Desea impresión en papel (Si o No)? Si (Return)
Aliste el impresor (Pulse RETURN para continuar) (Return)
Imprime los parámetros de la máquina sincrónica
ESCOJA EL SISTEMA DE EXCITACIÓN
Tecla # 4 — > Sistema de excitación de continua
Tecla # 5 — > Sistema de excitación de alterna
Tecla # 6 — > Sistema de excitación estático
Tecla # 7 — > Sin sistema de excitación
(Pulse tecla # 4)
Parámetros de los sistemas de excitación
Tiempo mínimo: T8 = O
Tiempo máximo: T9 = 10
Paso de integración: HO = 0.004
Se ingresa parámetros délos sistemas de excitación
Seleccione el sistema de excitación tipo DC
SO = 1 Sistema Tipo DC1
SO = 2 Sistema Tipo DC2
Escoja Opción SO = 1
Imprime parámetros del sistema de excitación tipo DC1

APÉNDICE "B" PAG. 5
Se está calculando condiciones iniciales
Imprime condiciones iniciales
Nombre del archivo de datos: CARGADC1
ARCHIVO: TESIS/CARGADCl
SE ESTA EJECUTANDO EL PROGRAMA
(Tiempo de duración 6 horas)
GRÁFICOS
NOMBRE DEL ARCHIVO DE DATOS: CARGADC1
Unidad donde está el disco de datos O (Return)
Listado de las variables almacenadas
Escoja opción: 1 (Return)
Hay 2001 puntos para el gráfico
DATO MÍNIMO: -0.8234
DATO MÁXIMO: -0.5736
TIEMPO MÍNIMO: O
TIEMPO MÁXIMO: 10
PARÁMETROS PARA EL WINDOW
En el eje X O (Return)
10 (Return)
En el eje Y - 1 (Return)
-0.5 (Return)
Coordenadas del origen O (Return)
-1 (Return)

1APÉNDICE "B" PAG. 6
Desea impresión en papel (Si o No) ? Si (Return)
Prepare el grafizador (Return) para continuar (Return)
TITULO DEL GRÁFICO: Corriente del eje en cuadratura (Return)
VARIABLE QUE SE A VA GRAFIZAR en el eje Y CORRIENTE (Return)
Realiza el gráfico
Desea poner títulos (Si o No) ? Si (Return)
PONGA EL TITULO: SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA TIPO
DC1 (Return)
DIRECCIÓN DE LA ESCRITURA REFERIDA al eje X
1 --- > Lado inferior
2 — > Lado lateral izquierdo
Escoja 1 (Return)
Desea poner títulos, (Si o No) ? Si (Return)
PONGA EL TITULO: GRÁFICO # 1
DIRECCIÓN DE LA ESCRITURA REFERIDA al eje X
1 — > Lado inferior
2 7— > Lado lateral izquierdo
Escoja 2 (Return)
Desea otro gráfico: No

A P E N D I C E C
PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN Y LA MAQUINA SINCRÓNICA
APÉNDICE "C" PAG. 1
A P É N D I C E C
PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN Y DE LA MAQUINA SINCRÓNICA
C.l PARÁMETROS DE LOS SISTEMAS DE EXCITACIÓN
SÍMBOLO DESCRIPCIÓN
EFD Voltaje de salida del excitador (Voltaje de campo del gene_
rador).
Fpv Factor de carga del rectificador.
IpD Corriente de campo del generador.
IN Corriente de carga del excitador normalizada.'
. K. Ganancia del regulador de voltaje.
KB Ganancia de la segunda etapa del regulador.
KC Factor de carga del rectificador debido a la reactancia de
conmutación.
KD Factor de desmagnetización, función de las reactancias del
alternador del excitador.
Kr Constante del excitador relacionado con el campo autoexita^
do.
Kp Ganancia del estabilizador del sistema de control de excj_
tacion.
KM Ganancia de la realimentación de corriente de campo del exn «
citador.
K. Ganancia del límite de corriente de campo del excitador.
K, Coeficiente de ganancia de corriente de fase.
K Coeficiente de ganancia del voltaje terminal.

APÉNDICE "C" PAG. 2
SÍMBOLO DESCRIPCIÓN
SE Función de saturación del excitador.
TA, TB, TC Constantes de tiempo del regulador de voltaje.
TE Constante del excitador (rango de integración asociado con
el control del excitador).
Tp Constante de tiempo del estabilizador del sistema de con-
trol de excitación.
TD Constante de tiempo del filtro de entrada al regulador.K
V. Voltaje interno del regulador.
VB Voltaje disponible del excitador.
Vc Voltaje de salida del compensador.
Vr- Voltaje del excitador detrás de la reactancia de conmuta-
ción.
VERR Señal de error de voltaje.
Vp Salida del estabilizador del sistema de excitación.
Vpr Señal proporcional a la corriente de campo del excitador.
VM, V^ Señales de realimentación de corriente de campo del exci-
tador.
V.R Referencia límite de corriente de campo del excitador.
VR Voltaje de salida del regulador.
VREF Voltaje de referencia (determinado para satisfacer las co_n
diciones iniciales).
V , I Voltaje y corriente terminal de generador.

APÉNDICE "C" PAG. 3
C.2 PARÁMETROS DE LA MAQUINA SINCRÓNICA |i|
SÍMBOLO DESCRIPCIÓN
r Resistencia de armadura.
r. Resistencia del devanado amortiguador en el eje q.
r.j Resistencia del devanado amortiguador en el eje d.
r. Resistencia del devanado de campo.
x-js Reactancia de dispersión del devanado de armadura.
x^ Reactancia de dispersión del devanado amortiguador
en el eje q.
x,,. Reactancia de dispersión del devanado amortiguador
en el eje d.
Reactancia de dispersión del devanado de campo.
x Reactancia de magnetización del eje en cuadratura,aqx . Reactancia de magnetización del eje directo.
tu. Velocidad angular eléctrica base.
AEI Ángulo eléctrico inicial de la perturbación.
PUT Ángulo del factor de potencia,ni
CTA(I)» 1 = 1 , 5 Vector que almacena las corrientes en el eje en cua_
dratura, en el eje directo, de fase; el torque ele£
tromagnético y la corriente de excitación.
E Voltaje interno generado.
HMnn Constante de inercia de la máquina.
Para determinar los parámetros en base de los cuales está simuU
da la máquina sincrónica se utiliza las siguientes ecuaciones |22J.

APÉNDICE "C" PAG. 4-
r r (sec. +)
xu = x (sec. 0)
xad = xd " xls
xaq = X q - X l s
xad (xd' - xu)
Xlkd v v Jx lfd'xad
Xaq
rfdV do
1Til
°b ' T do
.' ' qo
íad_xlfdtxlkd x , +
DATOS DE LA MAQUINA SINCRÓNICA (Tomados de referencia 21)
GENERADOR N* 1 PISAYAMBO
v . = 13.8 KV f - f
c = 4 0 MVASBT = 1673 Amp
B

APÉNDICE "C" PAG. 5
2
exocr (sec. +)
x (sec. 0)
xd
qx'
X"
d
rT"
do
doT"qo
4.7609 ohmios
412 Amp.
0.00991 p.u.
0.077 p.u.
1.09 p.u.
0.67 p.u.
0.281 p.u.
0.21 p.u.
0.275 p.u.
4.7 seg.
0.048 seg.
0.076 seg.
donde:
exocr(sec. +)
x(sec. 0)
x .
do
I1 do
T"qo
Corriente de circuito abierto del excitador.
Resistencia de secuencia positiva.
Reactancia de secuencia cero.
Reactancia sincrónica del eje directo.
Reactancia transitoria del eje directo.
Reactancia subtransitoria del eje directo.
Reactancia sincrónica del eje en cuadratura.
Reactancia subtransitoria del eje en cuadratura.
Constante de tiempo transitoria de eje directo de
circuito abierto.
Constante de tiempo subtransitoria de eje directo de
circuito abierto.
Constante de tiempo subtransitoria de eje en cuadra-

APÉNDICE "C" PAG. 6
tura de circuito abierto.
Para introducir la saturación de la Máquina Sincrónica es necesa_
rio seguir el procedimiento que se da en el numeral 2.5 del presente
trabajo, para lo cual se requiere la curva de vacio del generador en es
tudio, y con ésta definir los puntos que determinan la función de satu^
ración del generador sincrónico (figuras C-1, C-2).
Los puntos que determinan la función de saturación del generador
PISAYAMBO son:
F9 = 0.6
PI = 0.92
P2 = 1.09
P3 = 3.5286
P4 = 3.5777
P5 = 0.21875
P6 = 0.13125
P7 =. 1.1671
P8 = 1.0037
DATOS DEL TRANSFORMADOR
S = 40.000 KVA
V = 13.8/141.5 KV A - Y
f" = 60 Hz
taps en A.T. ± 3 x 2.5%
Z% a 40 MVA = 10%
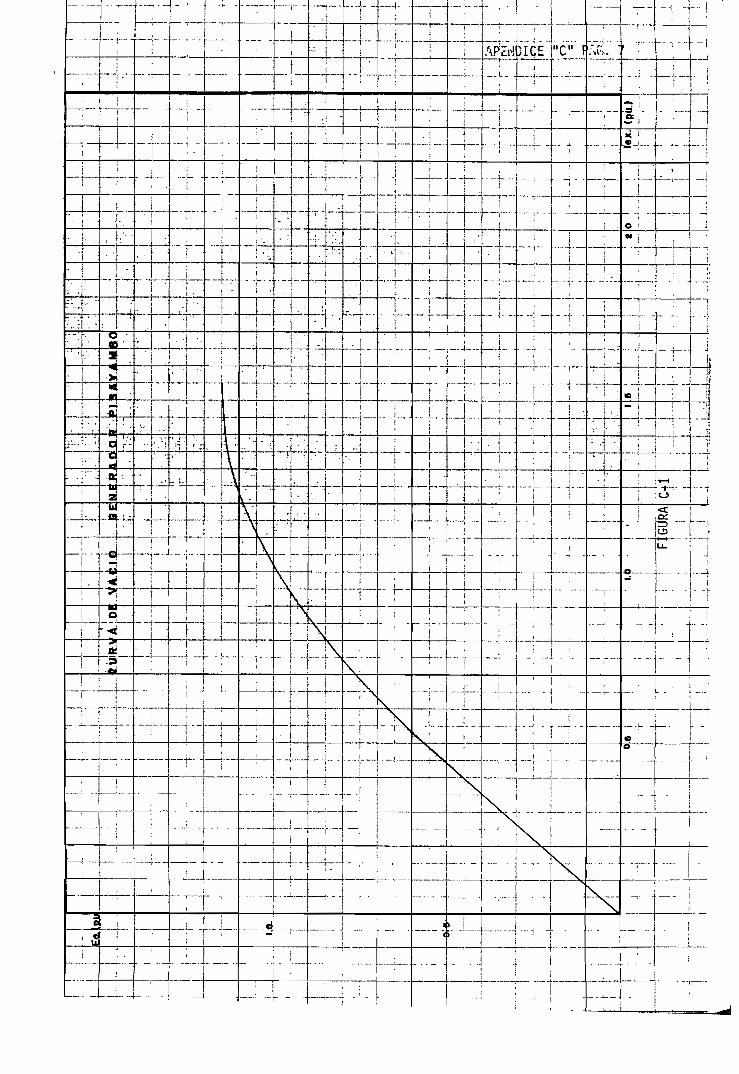


APÉNDICE "C" PAG. 9
DATOS DE LA LINEA
PUCARÁ - AMBATO
Longitud 30 Km
Conductor 477 MCM
Material ACSR
Hilo de guardia 1
" V = 1 3 8 KV
f 60 Hz
R = 0.0085 p.u.
X = 0.031 p.u.
DATOS DE LOS SISTEMAS DE EXCITACIÓN (Tomados de referencias 8, 10, 19)
- SISTEMAS DE EXCITACIÓN DE CORRIENTE CONTINUA
(Datos en p.u.)
EFDMAX = 5>24
'RMAX
;RMIN
= 65.2
= 0.2 seg.
= 2.607
= -2.607
TE =1.93 seg
SE.75MAX = °'176
SEMAX = °'61
KF ' = 0.12
T_ = 1 seg

APÉNDICE "C" PAG. 10
- SISTEMAS DE EXCITACIÓN DE CORRIENTE ALTERNA
TIPO AC1 TIPO AC2
KA = 40° VAMAX = 2-73TA = 0.02 seg VAMIN = -2.73
K£ = 1 VR(V]AX = 2.73
' TE " I-3 VRMIN - -2'46
KF = 0.03 KH = 0.2
TF = 1 seg • KL 1.5
Kc = 0.2 VLR = 1.25
SEMAX = °'12 KB 40°
SE.75MAX =0.03
VRMAX = 2'73
VRMIN = ~2-73
- SISTEMAS DE EXCITACIÓN ESTÁTICOS
TIPO ST1 ' TIPO ST2
TF - 1 seg EFDMAX =3.5
TA = 0.02 seg EFDFL = 2.34
•KF - 0.03 .VRMAX - 1.2
KE = ! VRMIN = -1-2
KA = 400 K = 1.19M P
VIMAX = !-2 KI - 2V = -1 9VIMIN i>¿
VRMAX = 3
V = -9VRMIN J
A P É N D I C E D
ANÁLISIS MATEMÁTICO DEL VOLTAJE TERMINAL DE LA MAQUINA SINCRÓNICA
EN TÉRMINOS DE CONCATENACIONES DE FLUJO

APÉNDICE "D" PAG. 1
Del Capítulo II la ecuación 2.6-7 viene dada por:
KctJ 1*1 + *Í3
IVndlJ " lVndBl + ÍT-|ZlJ |XL|
ms
donde:
CEc. D-l)
m y .L
wr- — X, R,
U)r L L
K.I -
5ja. i ov "xmc 0 0
lkq
n md , n md mdu 71 u x y
xls xlkd xlfd
En la ecuación D-l l lamando a los términos que la conforman de
la siguiente manera:
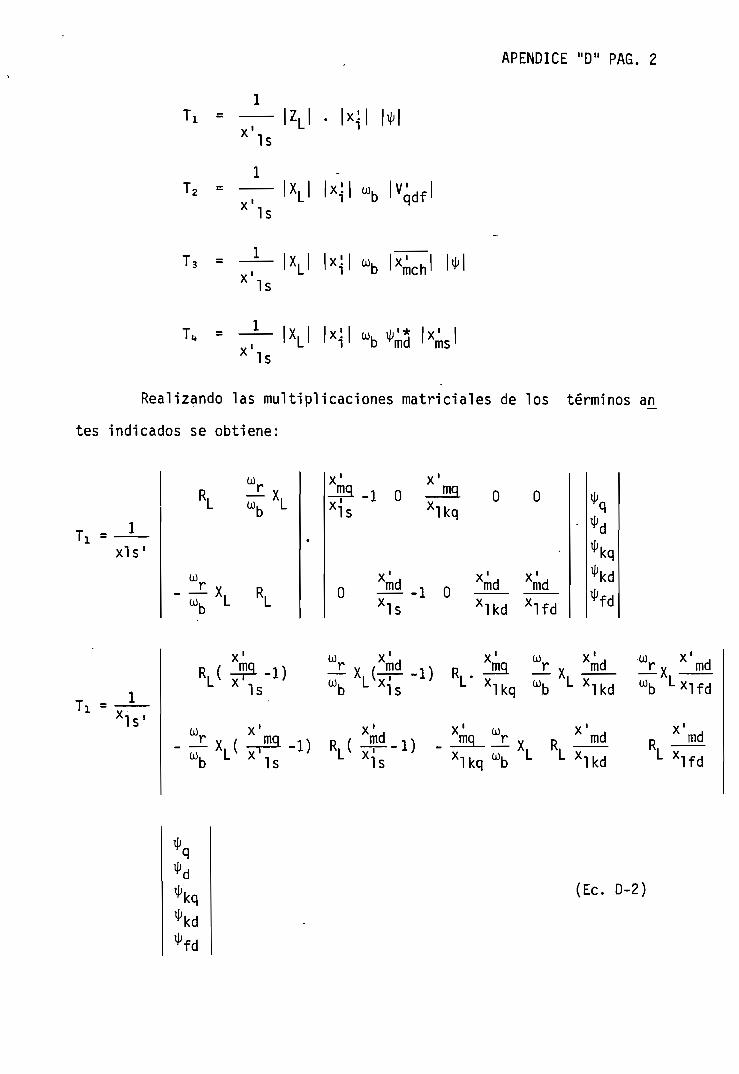
APÉNDICE "D" PAG. 2
Ti =x' Is
I*-
x1 IsM "b IV
X 1 Is1*1
X 1 Is
Realizando las multiplicaciones matriciales de los términos
tes indicados se obtiene:
Ti =xls'
R
(jo
ols lkq
md -i n md mdxls xlkd xlfd
Ti =
ls'
Is
x'- — x,wb l
| Y i
L Xls
M^-
RL' xTkq "b "L Xlkd
x'md
Xm x'X D• l\d
X 'md
L xlkd

APÉNDICE "D" PAG. 3
T2 =U)V
xls
X,A owb
XLnub
x1 x'JJE. 1 o -!üg_ 0 0xls xlkq
X ' X ' X 'n md i n md md
V1 U v vxls xlkd *lfd
vqB
VdBo0
Vf
T2 =
Y v ' Y Y '
L / mq _ i \ — mci n 0
wb xls ub xlkq
X x1 X x1 X x1Q L / md ,\ L md L md
Wb XÍ:S " W b X l k d ' WbXl fd
• uu •bVdB0
0
Vf
Ahora se buscará el valor del término T3
(Ec. D-3)
\¿
wb xl
0
a.- i) o -LÍW-. o os wb xlkq
V y 1 X X' X X'
L / md ,v n L md L mdV — i — J- 1 U
wb xls wb xlkd wb xlfd

APÉNDICE "D" PAG. 4
ls
x'(> - U)
y> V
Xls Xlkq
r x1s mq
xls xlkq
0ls
mq
*lkq
- i
xlkd b
xlfd Wb
_3 ~ 7
Tu Ti 2 Ti
T2i T22 T23
Ti 5
T25
(Ec. D-4)
xls X Is Xls Xlkq
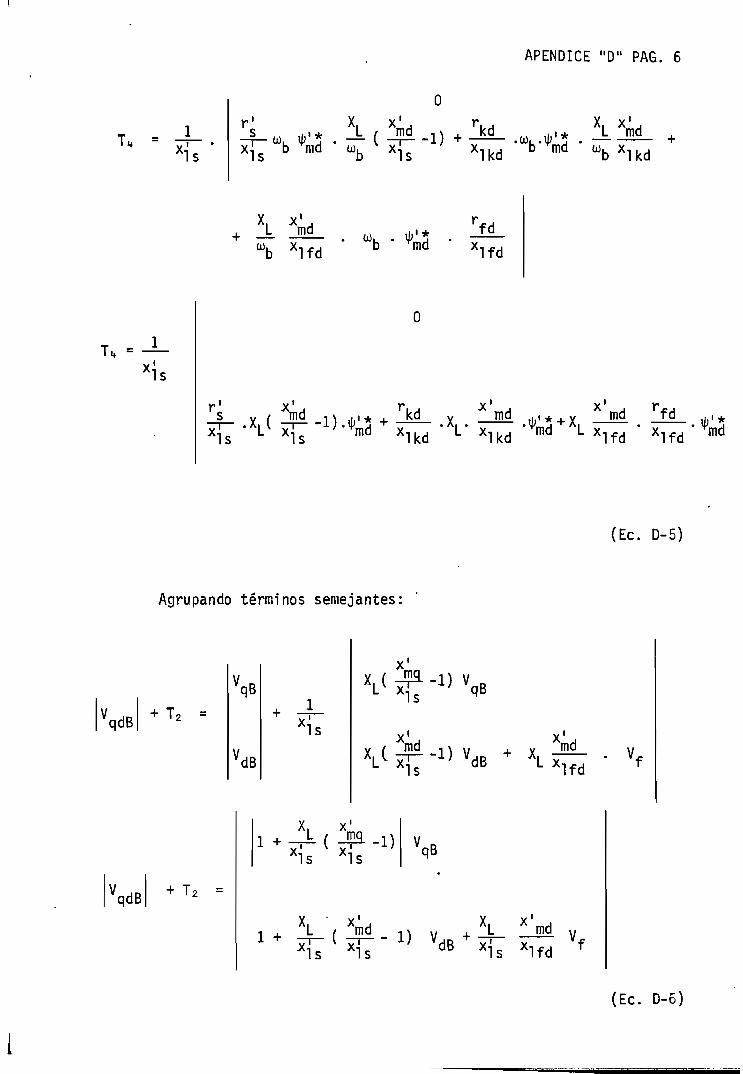
APÉNDICE "D" PAG. 6
Ti» - rrí 'AI -
ík ( 5fíL -i) + p«L .u^.* . ík jnd_ub xls xlkd b md wbx lkd
X x1 rL md ^i* fdwb xlfd ' b ' md xlfd
l_. i
- . , - . -.ls L xls rad xlkd L
A . I f .r mu TQL xlfd ' xlfd
Agrupando términos semejantes:
(Ec. D-5)
qdB
'dB
xís
f JH -i) v^ 3T 1; qB
]s
qdB + T2
X. x(
ls xls 'qB
t"d w
*ifd ' f
(Ec. D-5)
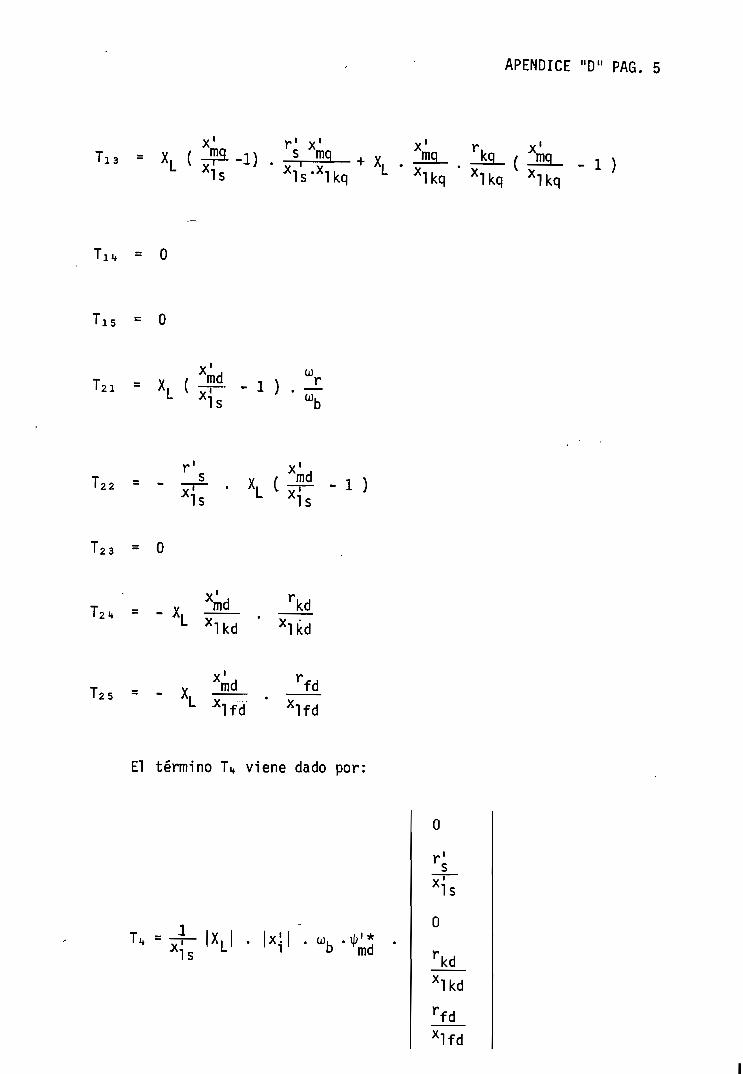
APÉNDICE "D" PAG. 5
Ti: -i ] s mq . y mq ng / mg , \ * v 1 Y I * Y • v v ^—— ~ -1 /
Xls'Xlkq L Xlkq Xlkq Xlkq
= O
121 \ < xmdT—Is
Cu
- 1 ) .-^wb
r'122
md^l7
- 1 )
T2 3 = O
= - X *mdL x
kd
1 kd *1kd
Tas - - X,md
Kl f d
fd
El término "U viene dado por:
b1*md
kd
"fd
<lfd

APÉNDICE "D" PAG. 7
Sumando las ecuaciones D-2 y D-4 se tiene:
Ti + T3 = -1X-í
•
X 1 M Y 1 . X 1 ü) X ' . W X ' ,p / m q - i x r y f md i ^ n roq r y md r ,, md
lxis "b L x í s lxlkq wb Lx lkdub lxlfd
r yub 1
s:-
>( < ' x ' . x ' towq. i \ / md ! \q r.xx|s i7 "Lvx]s iy x]kq ut
TU Tía Tía TUI TIS
'21 T22 T23 T2i» Tas
>V D' XL KL >
41
kq
*fd
<' x 'md R. md
(lkd xlfd
Sea Ti + T3 = T£
Donde T5 viene dado por la siguiente expresión:
¥ 'xls
Mi(2) Mi(3) Mi(4) Mi(5)
Mi(6) Mi(8) *fd
(Ec. D-7)
donde:

APÉNDICE "D" PAG. 8
Mi(l) = Tu + R, ( - 1)
reemplazando el valor de TU se obtiene:
ls S ls lkq ls
De igual manera se realiza para los otros valores de Mi(j); j = 1 - 10
tú X 1
Mi(2) = Ti2 +-71 X. ( J£- 1)
Mi(2) = -
= _ XL jna . _r_ + XL
Mi(2) =s
-X' )'-md mq' w.'b .
= Ti 3 + R,
MÍO) = x,( V - D j ' xl|nq +L Xls X lS < X lkq
Mi(4) =X 1
— XL X lkd
r x'.^(^-1)
Ikq Ikq
Xmc
Mi(4)
Mi(5)
= Xx 1 , comd r
L xlkd
ls
X 'xmdxlfd
Mi(5) = XLlfd

x1
T21 - -£ x ( J?a- i )b L xls
X 1
= XLL x
O) O)
. - xls L x
X 1
J¡als
xmd - xriq )
= T22
ls
M i ( 7 ) - - - X ( J ? . 1) + R ( J - 1)ls L xls L xls
x' , r'JBd- 1) . ( R - X . -T *xls L L xls
Mi(8) = T2 3 -lkq
Mi(8 ) = -
M i ( 9 ) =
M i ( 9 ) =
O)
" Xlkq ' L
T2i, + R|_ .
x 'v md- A. .
L *1,~*4
X 'md
X1kd
r. . x ' .ka . D md• Y i * Y
Aiixj L AII,J
M i ( 9 ) =Hkd Mkd
x1
= T 2 5 + Rmd
L xIfd
"md fd
L xlfd xlfd+ R md
L
~lfd Ifd
APÉNDICE "D" PAG. 9

APÉNDICE "D" PAG.10
Sumando las ecuaciones D-5, D-6 y D-7 se obtiene la expresión
que determina el voltaje terminal de la máquina sincrónica en términos
de las concatenaciones de flujo mutuo saturado.
K'.V
Mi(2)
Mi(6) Mi(7) Mi(8) Mi(9)
IM5)
*fd
(Ec. D-8)
donde:
sJ-. X, (3^-1). ^d+lT-' XL ' x^xls L xls md xlkd L xlkd
X. x1
Y ' * Y"
xls xls
¿d + XL *md lí
K1\_ f ^md
xls ' xlfd

B I B.L.I.O.G.R.A F.I A
1. JATIVA JESÚS, "Modelo Digital de Máquinas Sincrónicas incluida la
Saturación", Tesis de Grado. Escuela Politécnica Nacional, Quito,
Diciembre de 1981.
2. CALDERÓN DIEGO, "Modelo y Simulación Digital de la Máquina Sincró-
ca con una fase abierta y con reconexión incluida la Saturación", Te_
sis de Grado. Escuela Politécnica Nacional, Quito, Septiembre de
1983.
3. MENTOR POVEDA, "Methods of Interfacing Synchronous Machine with
Transmission Systems in a Digital Simulation", Technical Report TR-
EE 76-11, Purdue University, 1976.
4. WESTINGHOUSE. "Transmission and Distribution".
5. CHAMBERS, RUBENSTEIN, TEMOSHOK, "Resent Developments in Amplidyne
Regulator Excitation Systems for Large Generators", AIEE Trans, pt.
III. PAS, vol 80, pp. 1066-1071, February 1961.
6. IEEE COMMITTEE REPORT,"Proposed Excitation Systems Definitions for
Synchronous Machines", IEEE Trans, Vol. PAS-88, N£ 8, pp. 1248-1258,
August 1969.
7. LAÑE, ROGERS, VANCE, "Design and Tests of a Static Excitation Sys_
for Industrial and Utility steam Turbine - Generators", AIEE Trans,
PAS, vol 80, pp. 1072-1077, February 1961.

8. ANDERSON AND FOUAD, "Power System Control and Stability", Vol I,
Science Press, 1977.
9. IEEE Committee Report, "Excitation System Dynamic Characteristics",
IEEE Tras. PAS-92, pp 64-75, January/February, 1973.
10. IEEE Committee Report, "Excitation Systems Models for Power Systems
Stability Studies", IEEE Trans. PAS-100, N* 2, pp. 494-509, Febna
ry 1981.
11. L. FRERIS, "Analysis of a Hybrid Bridge Rectifier", Direct Current,
pp. 22-33, February 1966.
12. WITZKE, KRESSER, DILLARD, "Influence of AC Reactance on Voltage Re
gulation of 6 - Phase Rectifiers", AIÉE Trans, Comunicatión, Vol.
72, pp 244-253, July 1953.
13. DOMERATZKY, RUBENSTEIN, TEMOSHOK, "A Static Excitation Systems for
Industrial and Utility Steam Turbine-6enerators" AIEE Trans PAS -
80, pp 1072-1077, February 1961.
14. KUO, B.C. "Automatic Control, Systems", Prentice-Hall, Englewood
Cliffs, New Jersey, 1962.
15. DORF, R., "Sistemas Automáticos de Control", Fondo Educativo Inter^
americano, S.A. 1978. -
16. LÓPEZ JOSÉ, "Análisis Digital de la Pérdida de Excitación de la Má_
quina Sincrónica". Tesis de Grado, Escuela Politécnica Nacional,
Quito, Noviembre, 1979.
17. JAMES M.L., SMITH G.H., "Applied Numérica! Methods for Digital Com
putation", 2da. Ed., University of Nebraska.
18. CARNAHAN B., LUTHER H.A., WILKES J., "Applied Numerical Methods".
John Wiley & Sons, Inc. New York, 1969.
19. IEEE Committee Report, "Computer Representation of Excitation Sys-
tems" ÍEEE Trans, Vol. PAS-87, pp 1460-1470, June 1968.
20. ENRIQUEZ HARPER, "Análisis Moderno de los Sistemas Eléctricos de
Potencia", Editorial Limusa, 1977.
21. INECEL, "Marine Industrie Limitte".
22. ARGUELLO RÍOS GABRIEL, "Método de Determinación de los Parámetros
en Régimen Permanente y Transitorio de una Máquina Sincrónica", A
gosto, 1974.
23. MARTUNG, HARRY, MELOY," A Rotating Thyristor Excitation System for
Hidroelectric Generators", IEEE Trans, PAS, pp 74-81, September
1972.
24. SAMANIEGO JULIO, "Sistemas de Excitación, Modelos y Simulación", T
sis de Grado. Escuela Politécnica Nacional, Quito, Junio de 1978.

25. MULUKUTLA S. SARMA, "Synchronous Machines, (Their Theory, Stabili-
ty, and Excitation Systems)". Northeastern University.