
Modelado y análisis de sistemas dinámicos
13
1 Modelado y An´ alisis de Sistemas Din´ amicos Docente: Jaime Enrique Arango Monitor: Kristhian Quintero Hern´ andez Alumnos: Edison Fernando Mej´ ıa Chamorro Cod. 811041† Orlando Andr´ es Guar´ ın Aguirre Cod. 811520† Germ´ an David Rend´ on Quintero Cod. 811547† Sistemas Din´ amicos y de Control. Universidad Nacional De Colombia Sede Manizales 11 de septiembre de 2014 Abstract— Is presented the analysis mathematical and simulated corresponding to certain dynamical systems. It is analyzed through Matlab R control software, for to obtain the representations of the impulse response and unit step having as reference the transfer function of each. Index Terms—Palabras Claves. Funci´ on de transferen- cia, impulso, escal´ on, lazo abierto, lazo cerrado, sistemas din´ amicos, Matlab R . I. OBJETIVOS Realizar el modelo matem´ atico de cada uno de los modelos propuestos. Simular en Matlab R los sistemas teniendo en cuenta la funci´ on de transferencia; analizarlar el comportamiento de los sistemas de lazo abierto y de lazo cerrado e identificar las diferencias entre los mismos. Obtener la respuesta ante una se˜ nal de entrada tipo impulso o escal´ on de ambos sistemas y analizar los resultados; ademas identificar los cambios ante esos tipos de excitaciones. II. ACTIVIDAD 1. Realizar el modelado matem´ atico del sistema masa-resorte-amortiguador de la figura 1 : †Estudiantes de Ingenier´ ıa Electr´ onica Figura 1. Sistema masa-resorte-amortiguador. II-A. Modelado matem´ atico Para sistemas traslacionales, la segunda ley de Newton establece que ma = X F (1) Analizando el sistema mec´ anico, se puede deducir que tiene un solo movimiento independiente o grado de libertad, por lo cual se puede asumir que la ecuaci´ on diferencial que lo conforma es de grado 2. Sea P (t), la fuerza que se le aplica al sistema para poder desplazarlo una distancia x(t), M constituye la masa del sitema, D denota el coeficiente de fricci´ on viscosa en el amortiguador y K es la constante del resorte. Se supone que la masa M es proporcional a ¨ x (equivalente a la aceleracion de x(t)), para la fuerza de fricci´ on del amortiguador D es proporcional a ˙ x (igual a la velocidad constante x(t)) y el resorte K es lineal. Por lo tanto la ecuaci´ on diferencial del sistema es: P (t)= M d 2 x dt 2 + D dx dt + Kx (2)
-
Upload
german-david-rendon -
Category
Documents
-
view
20 -
download
0
description
Realizar el modelo matemático de cada uno de los modelos propuestos.Simular en Matlab R los sistemas teniendo en cuenta la función de transferencia; analizar elcomportamiento de los sistemas de lazo abierto y de lazo cerrado e identificar las diferencias entrelos mismos.Obtener la respuesta ante una señal de entrada tipo impulso o escalón de ambos sistemas y analizar losresultados; ademas identificar los cambios ante esos tipos de excitaciones.
Transcript of Modelado y análisis de sistemas dinámicos

1
Modelado y Analisis de Sistemas DinamicosDocente: Jaime Enrique Arango
Monitor: Kristhian Quintero Hernandez
Alumnos: Edison Fernando Mejıa Chamorro Cod. 811041†Orlando Andres Guarın Aguirre Cod. 811520†German David Rendon Quintero Cod. 811547†
Sistemas Dinamicos y de Control.Universidad Nacional De Colombia Sede Manizales
11 de septiembre de 2014
Abstract— Is presented the analysis mathematicaland simulated corresponding to certain dynamicalsystems. It is analyzed through Matlab R© controlsoftware, for to obtain the representations of theimpulse response and unit step having as referencethe transfer function of each.
Index Terms—Palabras Claves. Funcion de transferen-cia, impulso, escalon, lazo abierto, lazo cerrado, sistemasdinamicos, Matlab R©.
I. OBJETIVOS
Realizar el modelo matematico de cada uno de losmodelos propuestos.
Simular en Matlab R© los sistemas teniendo encuenta la funcion de transferencia; analizarlar elcomportamiento de los sistemas de lazo abierto yde lazo cerrado e identificar las diferencias entrelos mismos.
Obtener la respuesta ante una senal de entrada tipoimpulso o escalon de ambos sistemas y analizar losresultados; ademas identificar los cambios ante esostipos de excitaciones.
II. ACTIVIDAD
1. Realizar el modelado matematico del sistemamasa-resorte-amortiguador de la figura 1 :
†Estudiantes de Ingenierıa Electronica
Figura 1. Sistema masa-resorte-amortiguador.
II-A. Modelado matematico
Para sistemas traslacionales, la segunda ley deNewton establece que
ma =∑
F (1)
Analizando el sistema mecanico, se puede deducirque tiene un solo movimiento independiente ogrado de libertad, por lo cual se puede asumirque la ecuacion diferencial que lo conforma es degrado 2. Sea P (t), la fuerza que se le aplica alsistema para poder desplazarlo una distancia x(t),M constituye la masa del sitema, D denota elcoeficiente de friccion viscosa en el amortiguadory K es la constante del resorte. Se supone quela masa M es proporcional a x (equivalente a laaceleracion de x(t)), para la fuerza de friccion delamortiguador D es proporcional a x (igual a lavelocidad constante x(t)) y el resorte K es lineal.Por lo tanto la ecuacion diferencial del sistemaes:
P (t) = Md2x
dt2+D
dx
dt+Kx (2)
2
que se puede escribir tambien de la siguiente forma
P (t) = Mx+Dx+Kx (3)
A la ecuacion (3), se le aplica la transformada deLaplace (L [ ]) con Condiciones Iniciales CI=0, seobtiene:
P (s) = Ms2X(s) +DsX(s) +KX(s) (4)
se factoriza X(S) en (4)
P (s) = X(s)(Ms2 +Ds+K
)(5)
finalmente se despeja X(s) y pasa al denominadorP (s), obteniendo de esta manera la funcion detransferencia en lazo abierto dejandola en formamonica
X(s)
P (s)=
1M
s2 + DM s+ K
M
(6)
Para (6) se tiene un lazo de realimentacion unitario,por lo tanto la funcion de transferencia en lazocerrado es:
X(s)
P (s)=
1M
s2 + DM s+ K
M + 1M
(7)
Al sistema de la figura 1, se le asignaron lossiguientes valores:M = 10, D = 1N/m y K = 0,7.
Reemplazando los valores en la funcion detransferencia de la ecuacion (6) en lazo abierto yutilizando la herramienta de Matlab R© se obtiene:
Figura 2. Funcion de transferencia en lazo abierto.
Para la funcion de transferencia en lazo cerradoqueda:
Figura 3. Funcion de transferencia en lazo cerrado.
II-B. Simulaciones obtenidas del modelo ma-tematico
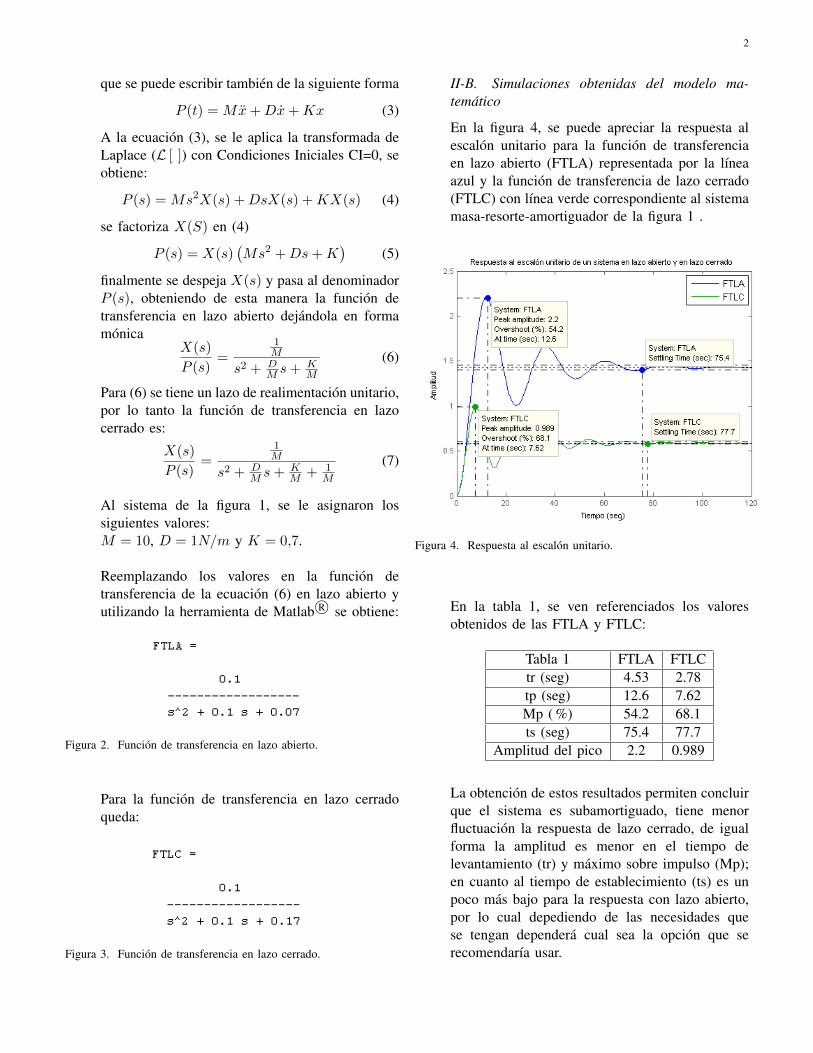
En la figura 4, se puede apreciar la respuesta alescalon unitario para la funcion de transferenciaen lazo abierto (FTLA) representada por la lıneaazul y la funcion de transferencia de lazo cerrado(FTLC) con lınea verde correspondiente al sistemamasa-resorte-amortiguador de la figura 1 .
Figura 4. Respuesta al escalon unitario.
En la tabla 1, se ven referenciados los valoresobtenidos de las FTLA y FTLC:
Tabla 1 FTLA FTLCtr (seg) 4.53 2.78tp (seg) 12.6 7.62Mp ( %) 54.2 68.1ts (seg) 75.4 77.7
Amplitud del pico 2.2 0.989
La obtencion de estos resultados permiten concluirque el sistema es subamortiguado, tiene menorfluctuacion la respuesta de lazo cerrado, de igualforma la amplitud es menor en el tiempo delevantamiento (tr) y maximo sobre impulso (Mp);en cuanto al tiempo de establecimiento (ts) es unpoco mas bajo para la respuesta con lazo abierto,por lo cual depediendo de las necesidades quese tengan dependera cual sea la opcion que serecomendarıa usar.
3
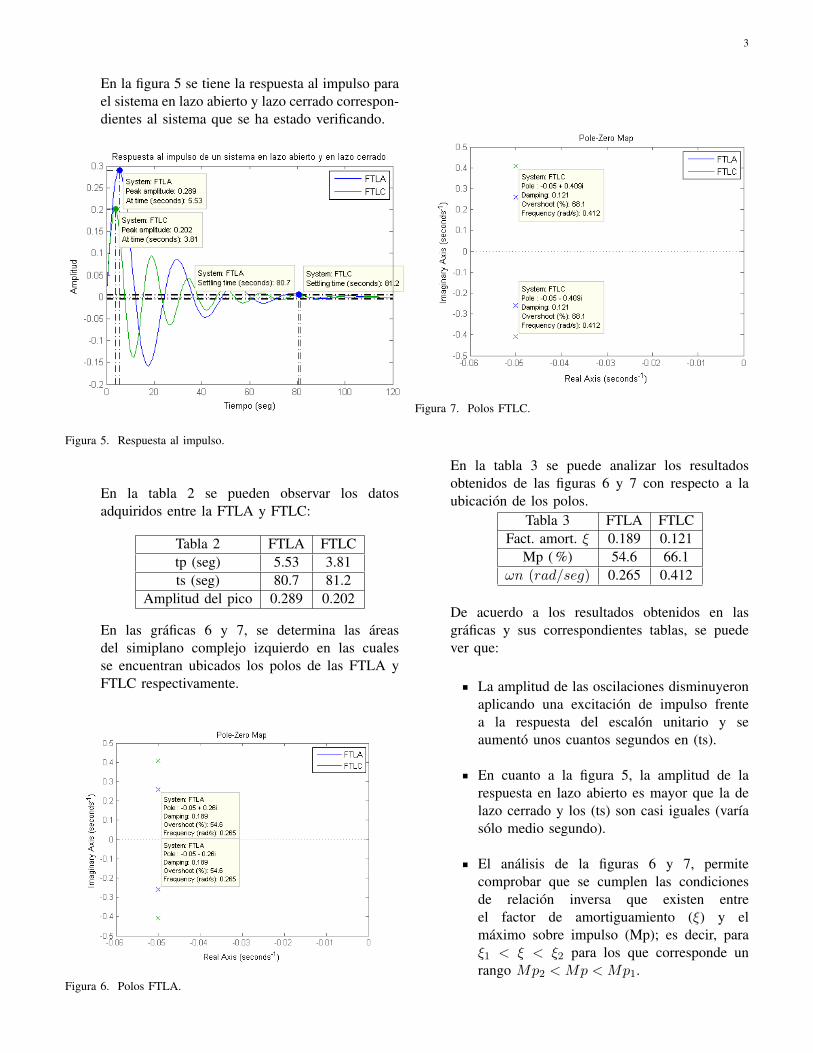
En la figura 5 se tiene la respuesta al impulso parael sistema en lazo abierto y lazo cerrado correspon-dientes al sistema que se ha estado verificando.
Figura 5. Respuesta al impulso.
En la tabla 2 se pueden observar los datosadquiridos entre la FTLA y FTLC:
Tabla 2 FTLA FTLCtp (seg) 5.53 3.81ts (seg) 80.7 81.2
Amplitud del pico 0.289 0.202
En las graficas 6 y 7, se determina las areasdel simiplano complejo izquierdo en las cualesse encuentran ubicados los polos de las FTLA yFTLC respectivamente.
Figura 6. Polos FTLA.
Figura 7. Polos FTLC.
En la tabla 3 se puede analizar los resultadosobtenidos de las figuras 6 y 7 con respecto a laubicacion de los polos.
Tabla 3 FTLA FTLCFact. amort. ξ 0.189 0.121
Mp ( %) 54.6 66.1ωn (rad/seg) 0.265 0.412
De acuerdo a los resultados obtenidos en lasgraficas y sus correspondientes tablas, se puedever que:
La amplitud de las oscilaciones disminuyeronaplicando una excitacion de impulso frentea la respuesta del escalon unitario y seaumento unos cuantos segundos en (ts).
En cuanto a la figura 5, la amplitud de larespuesta en lazo abierto es mayor que la delazo cerrado y los (ts) son casi iguales (varıasolo medio segundo).
El analisis de la figuras 6 y 7, permitecomprobar que se cumplen las condicionesde relacion inversa que existen entreel factor de amortiguamiento (ξ) y elmaximo sobre impulso (Mp); es decir, paraξ1 < ξ < ξ2 para los que corresponde unrango Mp2 < Mp < Mp1.

4
2. Realizar el modelado matematico del circuito condos almacenadores de energıa de la figura 8
Figura 8. Circuito RLC serie.
II-C. Modelo matematico
Para resolver este ejercicio, se lleva a cabo lasimplificacion del mismo por medio de impedan-cias complejas como se puede ver en la figura9. Este procedimiento permite resolver de formasimplificada el procedimiento matematico ya quedirectamente se puede aplicar la transformada deLaplace sin necesidad de escribir las ecuacionesdiferenciales.
Figura 9. Circuito equivalente en impedancias complejas.
Sea Z1 = Ls, Z2 = RyZ3 = 1/(Cs). Como lasimpedancias Z2 y Z3 se encuentran en paralelo sereducen a una sola impedancia llamada Zeq comose visualiza en la figura 10
Figura 10. Cicuito equivalente simplificado
El paralelo de las impedencias mencionadas queda
Z2//Z3 =R(
1Cs
)R+ 1
Cs
=R
RCs+ 1(8)
Para hallar E0(s), se aplica el siguiente divisor detension
E0(s) =Zeq
Z1 + ZeqEi(s) =
RRCs+1
Ls+ RRCs+1
Ei(s)
(9)De (9), se despeja Ei(s) al otro lado de la igualdady se divide numerador y denominador entre R
E0(s)
Ei(s)=
1
LCs2 + LRs+ 1
(10)
Por ultimo, la ecuacion (10) se deja de formamonica obtiendo de esta forma la funcion detransferencia de la salida E0 con respecto a laentrada Ei en lazo abierto:
E0(s)
Ei(s)=
1LC
s2 + 1RC s+ 1
LC
(11)
De la ecuacion (11), se obtiene la funcion detransferencia en lazo cerrado:
E0(s)
Ei(s)=
1LC
s2 + 1RC s+ 2
LC
(12)
Al sistema de la figura 8 se le asignan lossiguientes valores:R = 100kΩ, C = 1uF y L = 0,9H
De esta forma reemplazando los valores enla funciones de transferencia en lazo abierto ylazo cerrado quedan de la siguiente forma:
Figura 11. Funcion de transferencia en lazo abierto.
Figura 12. Funcion de transferencia en lazo cerrado.
5
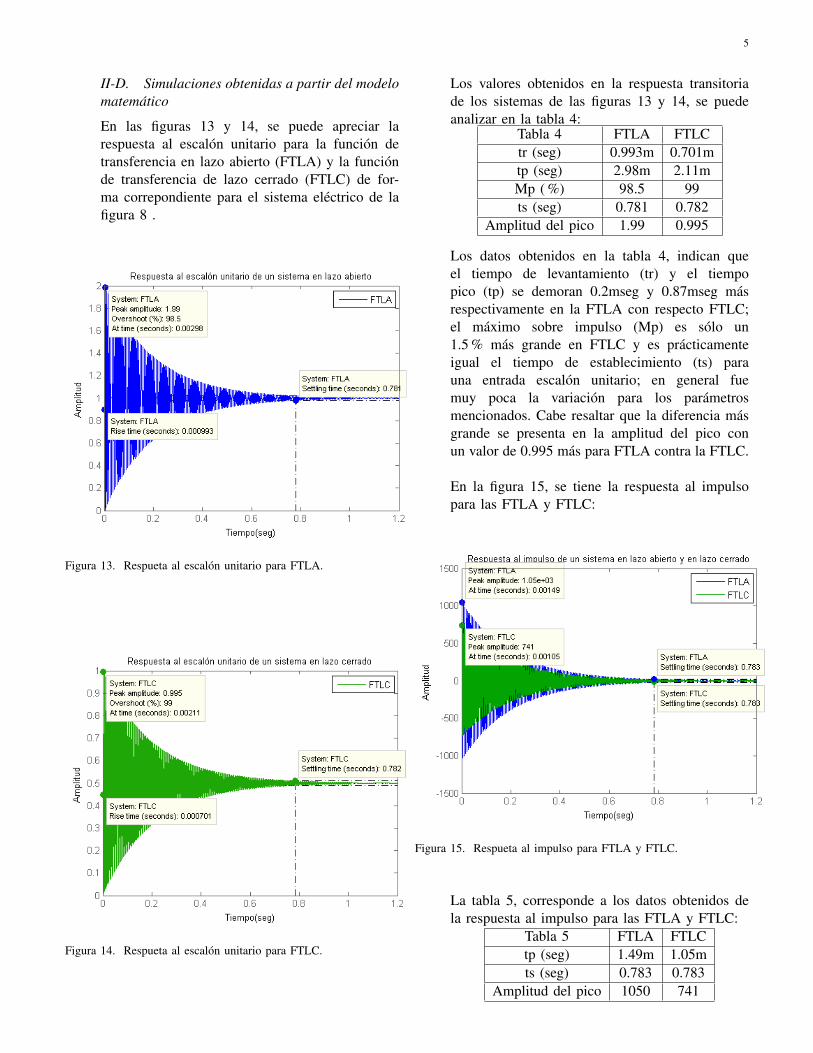
II-D. Simulaciones obtenidas a partir del modelomatematico
En las figuras 13 y 14, se puede apreciar larespuesta al escalon unitario para la funcion detransferencia en lazo abierto (FTLA) y la funcionde transferencia de lazo cerrado (FTLC) de for-ma correpondiente para el sistema electrico de lafigura 8 .
Figura 13. Respueta al escalon unitario para FTLA.
Figura 14. Respueta al escalon unitario para FTLC.
Los valores obtenidos en la respuesta transitoriade los sistemas de las figuras 13 y 14, se puedeanalizar en la tabla 4:
Tabla 4 FTLA FTLCtr (seg) 0.993m 0.701mtp (seg) 2.98m 2.11mMp ( %) 98.5 99ts (seg) 0.781 0.782
Amplitud del pico 1.99 0.995
Los datos obtenidos en la tabla 4, indican queel tiempo de levantamiento (tr) y el tiempopico (tp) se demoran 0.2mseg y 0.87mseg masrespectivamente en la FTLA con respecto FTLC;el maximo sobre impulso (Mp) es solo un1.5 % mas grande en FTLC y es practicamenteigual el tiempo de establecimiento (ts) parauna entrada escalon unitario; en general fuemuy poca la variacion para los parametrosmencionados. Cabe resaltar que la diferencia masgrande se presenta en la amplitud del pico conun valor de 0.995 mas para FTLA contra la FTLC.
En la figura 15, se tiene la respuesta al impulsopara las FTLA y FTLC:
Figura 15. Respueta al impulso para FTLA y FTLC.
La tabla 5, corresponde a los datos obtenidos dela respuesta al impulso para las FTLA y FTLC:
Tabla 5 FTLA FTLCtp (seg) 1.49m 1.05mts (seg) 0.783 0.783
Amplitud del pico 1050 741
6
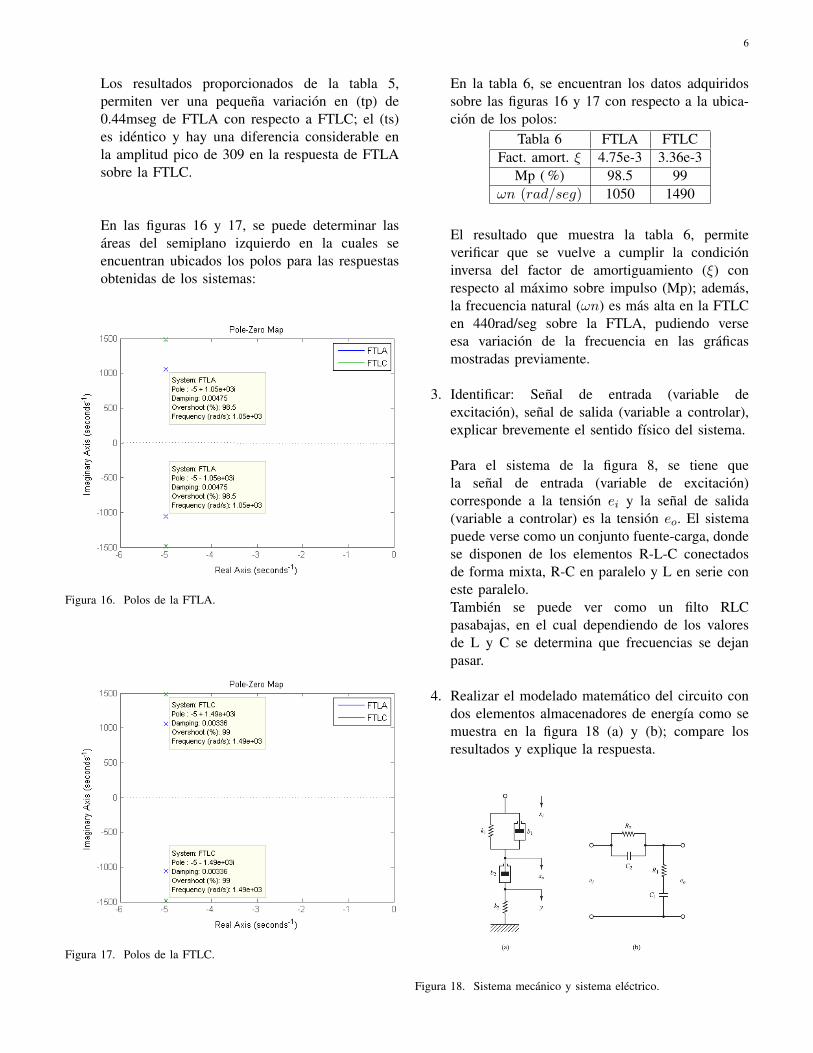
Los resultados proporcionados de la tabla 5,permiten ver una pequena variacion en (tp) de0.44mseg de FTLA con respecto a FTLC; el (ts)es identico y hay una diferencia considerable enla amplitud pico de 309 en la respuesta de FTLAsobre la FTLC.
En las figuras 16 y 17, se puede determinar lasareas del semiplano izquierdo en la cuales seencuentran ubicados los polos para las respuestasobtenidas de los sistemas:
Figura 16. Polos de la FTLA.
Figura 17. Polos de la FTLC.
En la tabla 6, se encuentran los datos adquiridossobre las figuras 16 y 17 con respecto a la ubica-cion de los polos:
Tabla 6 FTLA FTLCFact. amort. ξ 4.75e-3 3.36e-3
Mp ( %) 98.5 99ωn (rad/seg) 1050 1490
El resultado que muestra la tabla 6, permiteverificar que se vuelve a cumplir la condicioninversa del factor de amortiguamiento (ξ) conrespecto al maximo sobre impulso (Mp); ademas,la frecuencia natural (ωn) es mas alta en la FTLCen 440rad/seg sobre la FTLA, pudiendo verseesa variacion de la frecuencia en las graficasmostradas previamente.
3. Identificar: Senal de entrada (variable deexcitacion), senal de salida (variable a controlar),explicar brevemente el sentido fısico del sistema.
Para el sistema de la figura 8, se tiene quela senal de entrada (variable de excitacion)corresponde a la tension ei y la senal de salida(variable a controlar) es la tension eo. El sistemapuede verse como un conjunto fuente-carga, dondese disponen de los elementos R-L-C conectadosde forma mixta, R-C en paralelo y L en serie coneste paralelo.Tambien se puede ver como un filto RLCpasabajas, en el cual dependiendo de los valoresde L y C se determina que frecuencias se dejanpasar.
4. Realizar el modelado matematico del circuito condos elementos almacenadores de energıa como semuestra en la figura 18 (a) y (b); compare losresultados y explique la respuesta.
Figura 18. Sistema mecanico y sistema electrico.

7
Suponiendo que los desplazamientos xi, xo y y semiden desde la posicion de reposo, se tiene parael sistema mecanico de la figura 18 (a) se tiene elsiguiente sistema de ecuaciones diferenciales:
k1(xi − xo) + b1(xi − xo) = b2(xo − y) (13)
b2(xo − y) = k2xo (14)
Aplicando la transformada de laplace (L ) a (13) y(14), se obtiene el siguiente sistema de ecuaciones:
k1(Xi −Xo) + b1(sXi − sXo) = b2(sXo − sY ))(15)
b2(sXo − sY ) = sk2Xo (16)
Despejando y de (16) :
Y =b2sXo
b2s+ k2(17)
Reemplazando (17) en la ecuacion (15):
k1Xi − k1Xo + sb1Xi − sb1Xo = sb2Xo − sb2Y(18)
k1Xi − k1Xo + sb1Xi − sb1Xo = sb2Xo − sb2b2sXo
b2s+ k2(19)
Agrupando terminos semejantes se obtiene la re-lacion X0(s)/Xi(s) en lazo abierto ası:
X0(s)
Xi(s)=
b2b1s2 + s(b1k2 + b2k1) + k2k1
b2b1s2 + s(b1k2 + b2k1) + sb2k2 + k2k1(20)
expresada en forma monica sera:
X0(s)
Xi(s)=
s2 + s(k2
b2+ k1
b1
)+ k2k1
b2b1
s2 + s(k2
b2+ k1
b1+ k1
b2
)+ k2k1
b2b1
(21)
Teniendo en cuenta el circuito RC conectadoen paralelo entre R2 y C2 y el el circuito RCconectado en serie entre R1 y C1, se puede
representar el cicuito electrico de la figura 18(b) ası:
Figura 19. sistema mecanico y sistema electrico.
donde:
Z1 = R2||C2 =(R2) ∗ 1/C2s
R2 + 1/C2s=
R2
R2C2s+ 1(22)
Z2 = R1 +1
C1s=R1C1s+ 1
C1s(23)
Aplicando la tecnica del divisor de tension, setendra que la salida E0s sera igual a:
E0(s) =Z2
Z1 + Z2Ei(s) (24)
(25)E0(s)
Ei(s)=
Z2
Z1 + Z2(26)
Reemplazando 22 y 23 en 26 se tiene la funcionde transferencia en lazo abierto:
E0(s)
Ei(s)=
(C1R1s+ 1)(C2R2s+ 1)
(C1R1s+ 1)(C2R2s+ 1) + C1R2s(27)
La funcion de transferencia en forma monicasera:
E0(s)
Ei(s)=
s2 + s(
1R2C2
+ 1R1C1
)+ 1
R1C1R2C2
s2 + s(
1R2C2
+ 1R1C1
+ 1R1C2
)+ 1
R1C1R2C2
(28)
Si se observan las expresiones obtenidas para lafuncion de transferencia del sistema mecanico y
8
del circuito electrico, se encontraran ciertas simi-litudes entre ellas. Estas dos expresiones son analo-gas debido a que un amortiguador esencialmenteabsorbe energıa. Esta energıa absorbida se disipacomo calor y el amortiguador no almacena energıacinetica ni potencial, similar al comportamientodel resistor. Por el contrario un resorte al irsecontrayendo va acumulando energıa potencial lacual utilizara para volver a su posicion inicial. Estecomportamiento es analogo al de un capacitor. Porlo tanto se tendra que:
1
c1= k1 (29)
b1 = R1 (30)1
c2= k2 (31)
b2 = R2 (32)
Para comprobar la analogıa entre las funciones detransferencia se reemplazaran los valores anterio-res en la funcion de transferencia en lazo abiertodel sistema mecanico.
X0(s)
Xi(s)=
s2 + s(k2
b2+ k1
b1
)+ k2k1
b2b1
s2 + s(k2
b2+ k1
b1+ k1
b2
)+ k2k1
b2b1
(33)
X0(s)
Xi(s)=
s2 + s(1/c2R2
+ 1/c1R1
)+ 1/c21/c1
R2R1
s2 + s(1/c2R2
+ 1/c1R1
+ 1/c1R2
)+ 1/c21/c1
R2R1
(34)
X0(s)
Xi(s)=
s2 + s(
1R2C2
+ 1R1C1
)+ 1
R1C1R2C2
s2 + s(
1R2C2
+ 1R1C1
+ 1R1C2
)+ 1
R1C1R2C2
(35)
III. DIAGRAMAS DE BLOQUES
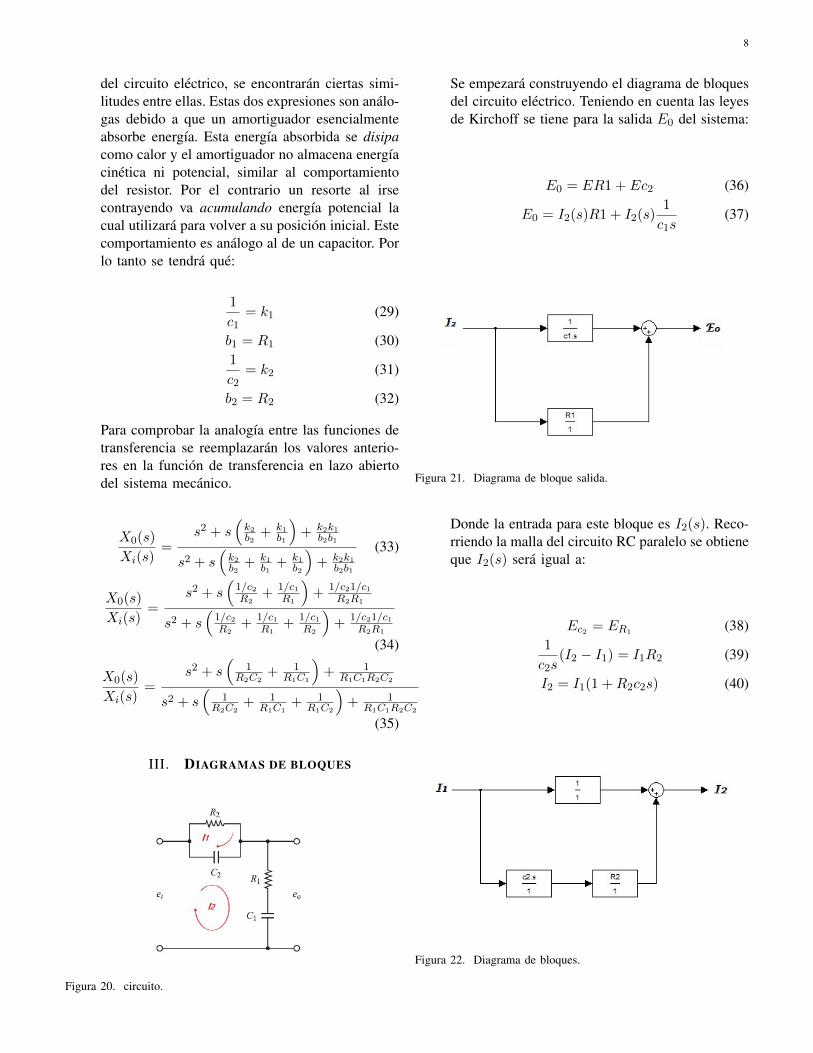
Figura 20. circuito.
Se empezara construyendo el diagrama de bloquesdel circuito electrico. Teniendo en cuenta las leyesde Kirchoff se tiene para la salida E0 del sistema:
E0 = ER1 + Ec2 (36)
E0 = I2(s)R1 + I2(s)1
c1s(37)
Figura 21. Diagrama de bloque salida.
Donde la entrada para este bloque es I2(s). Reco-rriendo la malla del circuito RC paralelo se obtieneque I2(s) sera igual a:
Ec2 = ER1(38)
1
c2s(I2 − I1) = I1R2 (39)
I2 = I1(1 +R2c2s) (40)
Figura 22. Diagrama de bloques.
9
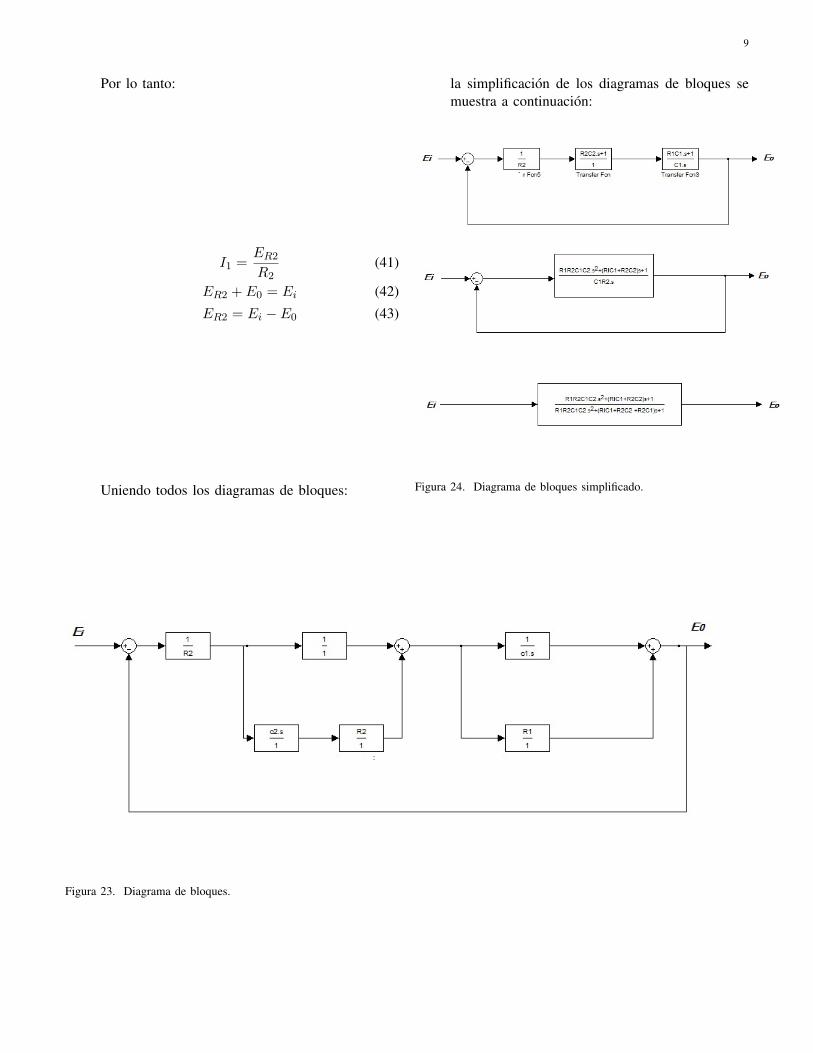
Por lo tanto:
I1 =ER2
R2(41)
ER2 + E0 = Ei (42)
ER2 = Ei − E0 (43)
Uniendo todos los diagramas de bloques:
Figura 23. Diagrama de bloques.
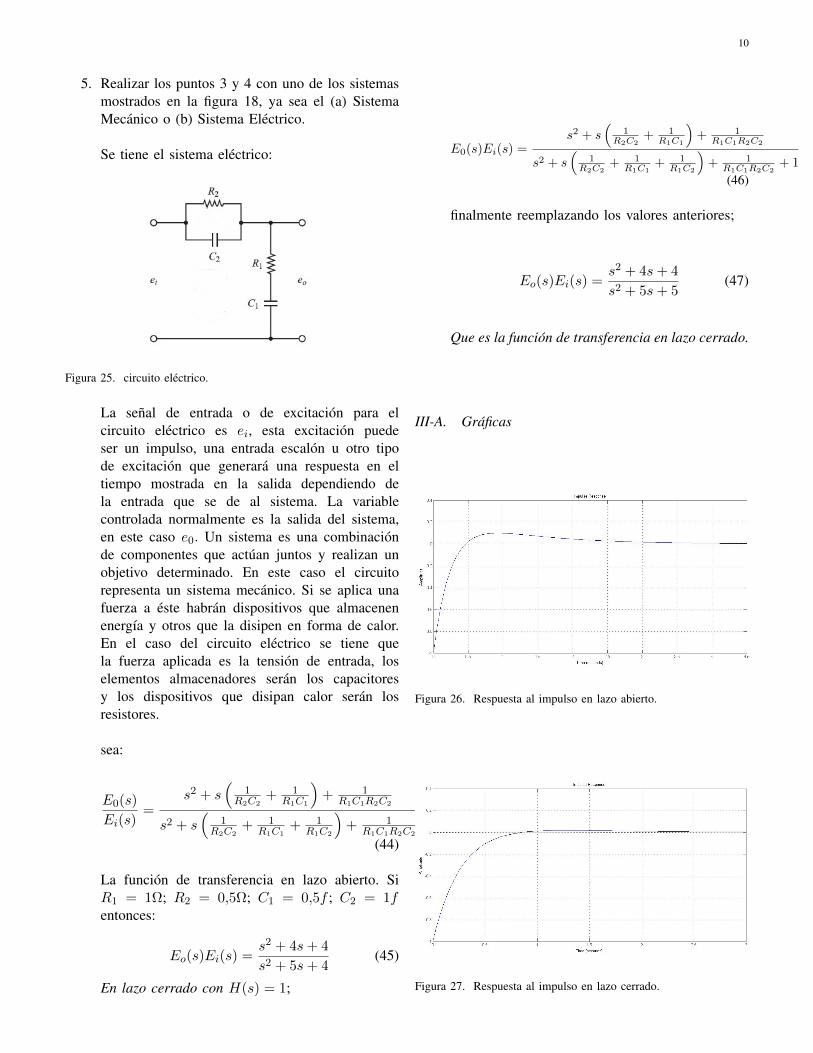
la simplificacion de los diagramas de bloques semuestra a continuacion:
Figura 24. Diagrama de bloques simplificado.
10
5. Realizar los puntos 3 y 4 con uno de los sistemasmostrados en la figura 18, ya sea el (a) SistemaMecanico o (b) Sistema Electrico.
Se tiene el sistema electrico:
Figura 25. circuito electrico.
La senal de entrada o de excitacion para elcircuito electrico es ei, esta excitacion puedeser un impulso, una entrada escalon u otro tipode excitacion que generara una respuesta en eltiempo mostrada en la salida dependiendo dela entrada que se de al sistema. La variablecontrolada normalmente es la salida del sistema,en este caso e0. Un sistema es una combinacionde componentes que actuan juntos y realizan unobjetivo determinado. En este caso el circuitorepresenta un sistema mecanico. Si se aplica unafuerza a este habran dispositivos que almacenenenergıa y otros que la disipen en forma de calor.En el caso del circuito electrico se tiene quela fuerza aplicada es la tension de entrada, loselementos almacenadores seran los capacitoresy los dispositivos que disipan calor seran losresistores.
sea:
E0(s)
Ei(s)=
s2 + s(
1R2C2
+ 1R1C1
)+ 1
R1C1R2C2
s2 + s(
1R2C2
+ 1R1C1
+ 1R1C2
)+ 1
R1C1R2C2
(44)
La funcion de transferencia en lazo abierto. SiR1 = 1Ω; R2 = 0,5Ω; C1 = 0,5f ; C2 = 1fentonces:
Eo(s)Ei(s) =s2 + 4s+ 4
s2 + 5s+ 4(45)
En lazo cerrado con H(s) = 1;
E0(s)Ei(s) =s2 + s
(1
R2C2+ 1
R1C1
)+ 1
R1C1R2C2
s2 + s(
1R2C2
+ 1R1C1
+ 1R1C2
)+ 1
R1C1R2C2+ 1
(46)
finalmente reemplazando los valores anteriores;
Eo(s)Ei(s) =s2 + 4s+ 4
s2 + 5s+ 5(47)
Que es la funcion de transferencia en lazo cerrado.
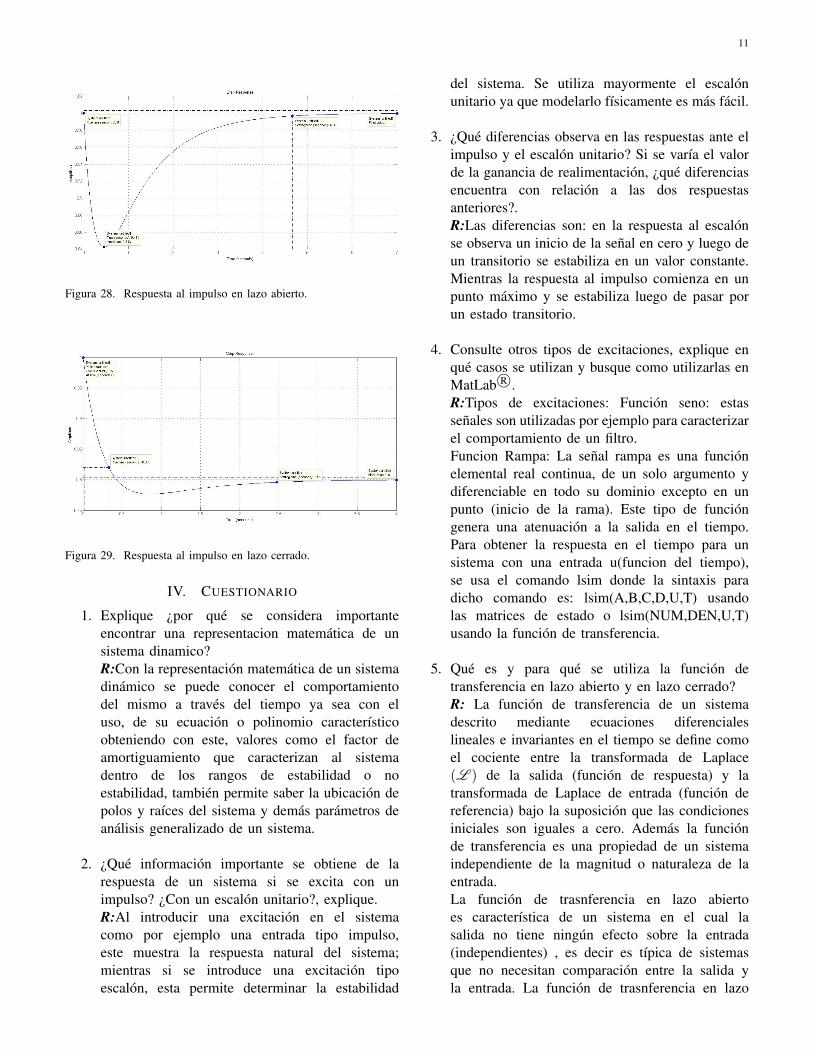
III-A. Graficas
Figura 26. Respuesta al impulso en lazo abierto.
Figura 27. Respuesta al impulso en lazo cerrado.
11
Figura 28. Respuesta al impulso en lazo abierto.
Figura 29. Respuesta al impulso en lazo cerrado.
IV. CUESTIONARIO
1. Explique ¿por que se considera importanteencontrar una representacion matematica de unsistema dinamico?R:Con la representacion matematica de un sistemadinamico se puede conocer el comportamientodel mismo a traves del tiempo ya sea con eluso, de su ecuacion o polinomio caracterısticoobteniendo con este, valores como el factor deamortiguamiento que caracterizan al sistemadentro de los rangos de estabilidad o noestabilidad, tambien permite saber la ubicacion depolos y raıces del sistema y demas parametros deanalisis generalizado de un sistema.
2. ¿Que informacion importante se obtiene de larespuesta de un sistema si se excita con unimpulso? ¿Con un escalon unitario?, explique.R:Al introducir una excitacion en el sistemacomo por ejemplo una entrada tipo impulso,este muestra la respuesta natural del sistema;mientras si se introduce una excitacion tipoescalon, esta permite determinar la estabilidad
del sistema. Se utiliza mayormente el escalonunitario ya que modelarlo fısicamente es mas facil.
3. ¿Que diferencias observa en las respuestas ante elimpulso y el escalon unitario? Si se varıa el valorde la ganancia de realimentacion, ¿que diferenciasencuentra con relacion a las dos respuestasanteriores?.R:Las diferencias son: en la respuesta al escalonse observa un inicio de la senal en cero y luego deun transitorio se estabiliza en un valor constante.Mientras la respuesta al impulso comienza en unpunto maximo y se estabiliza luego de pasar porun estado transitorio.
4. Consulte otros tipos de excitaciones, explique enque casos se utilizan y busque como utilizarlas enMatLab R©.R:Tipos de excitaciones: Funcion seno: estassenales son utilizadas por ejemplo para caracterizarel comportamiento de un filtro.Funcion Rampa: La senal rampa es una funcionelemental real continua, de un solo argumento ydiferenciable en todo su dominio excepto en unpunto (inicio de la rama). Este tipo de funciongenera una atenuacion a la salida en el tiempo.Para obtener la respuesta en el tiempo para unsistema con una entrada u(funcion del tiempo),se usa el comando lsim donde la sintaxis paradicho comando es: lsim(A,B,C,D,U,T) usandolas matrices de estado o lsim(NUM,DEN,U,T)usando la funcion de transferencia.
5. Que es y para que se utiliza la funcion detransferencia en lazo abierto y en lazo cerrado?R: La funcion de transferencia de un sistemadescrito mediante ecuaciones diferencialeslineales e invariantes en el tiempo se define comoel cociente entre la transformada de Laplace(L ) de la salida (funcion de respuesta) y latransformada de Laplace de entrada (funcion dereferencia) bajo la suposicion que las condicionesiniciales son iguales a cero. Ademas la funcionde transferencia es una propiedad de un sistemaindependiente de la magnitud o naturaleza de laentrada.La funcion de trasnferencia en lazo abiertoes caracterıstica de un sistema en el cual lasalida no tiene ningun efecto sobre la entrada(independientes) , es decir es tıpica de sistemasque no necesitan comparacion entre la salida yla entrada. La funcion de trasnferencia en lazo
12
cerrado es tıpica de sistemas realimentados, esdecir la senal de salida es comparada con laentrada a fin de realizar una accion de control.
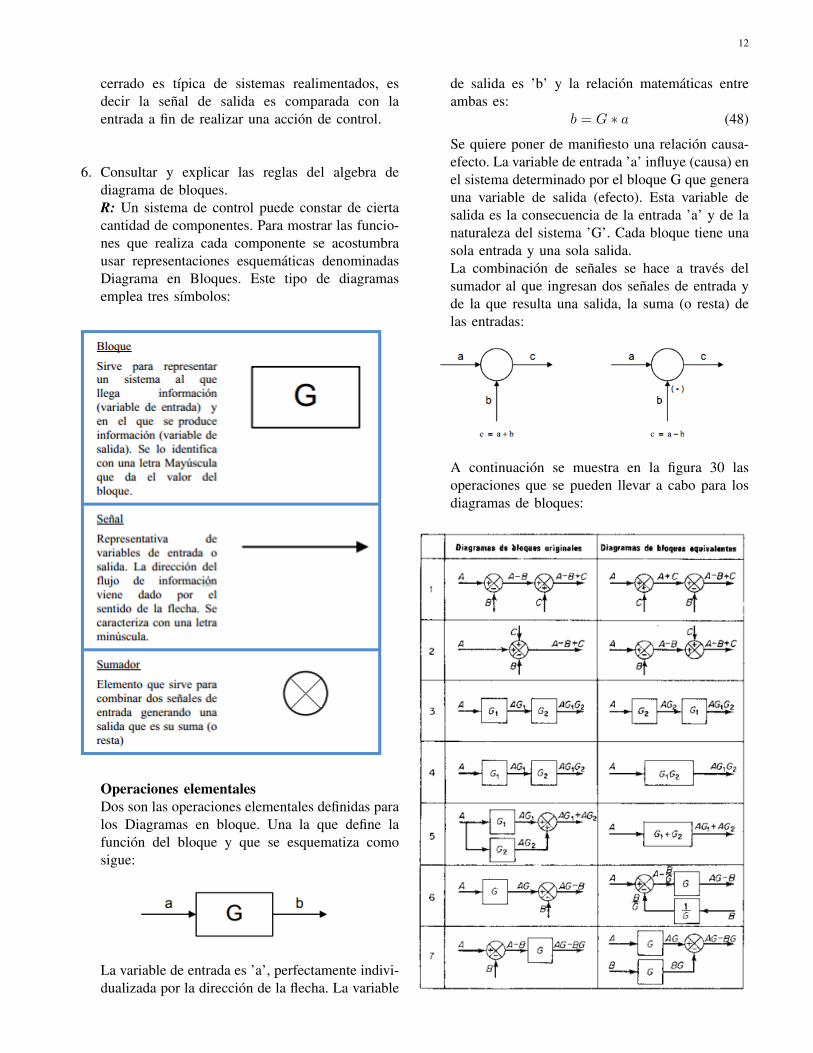
6. Consultar y explicar las reglas del algebra dediagrama de bloques.R: Un sistema de control puede constar de ciertacantidad de componentes. Para mostrar las funcio-nes que realiza cada componente se acostumbrausar representaciones esquematicas denominadasDiagrama en Bloques. Este tipo de diagramasemplea tres sımbolos:
Operaciones elementalesDos son las operaciones elementales definidas paralos Diagramas en bloque. Una la que define lafuncion del bloque y que se esquematiza comosigue:
La variable de entrada es ’a’, perfectamente indivi-dualizada por la direccion de la flecha. La variable
de salida es ’b’ y la relacion matematicas entreambas es:
b = G ∗ a (48)
Se quiere poner de manifiesto una relacion causa-efecto. La variable de entrada ’a’ influye (causa) enel sistema determinado por el bloque G que generauna variable de salida (efecto). Esta variable desalida es la consecuencia de la entrada ’a’ y de lanaturaleza del sistema ’G’. Cada bloque tiene unasola entrada y una sola salida.La combinacion de senales se hace a traves delsumador al que ingresan dos senales de entrada yde la que resulta una salida, la suma (o resta) delas entradas:
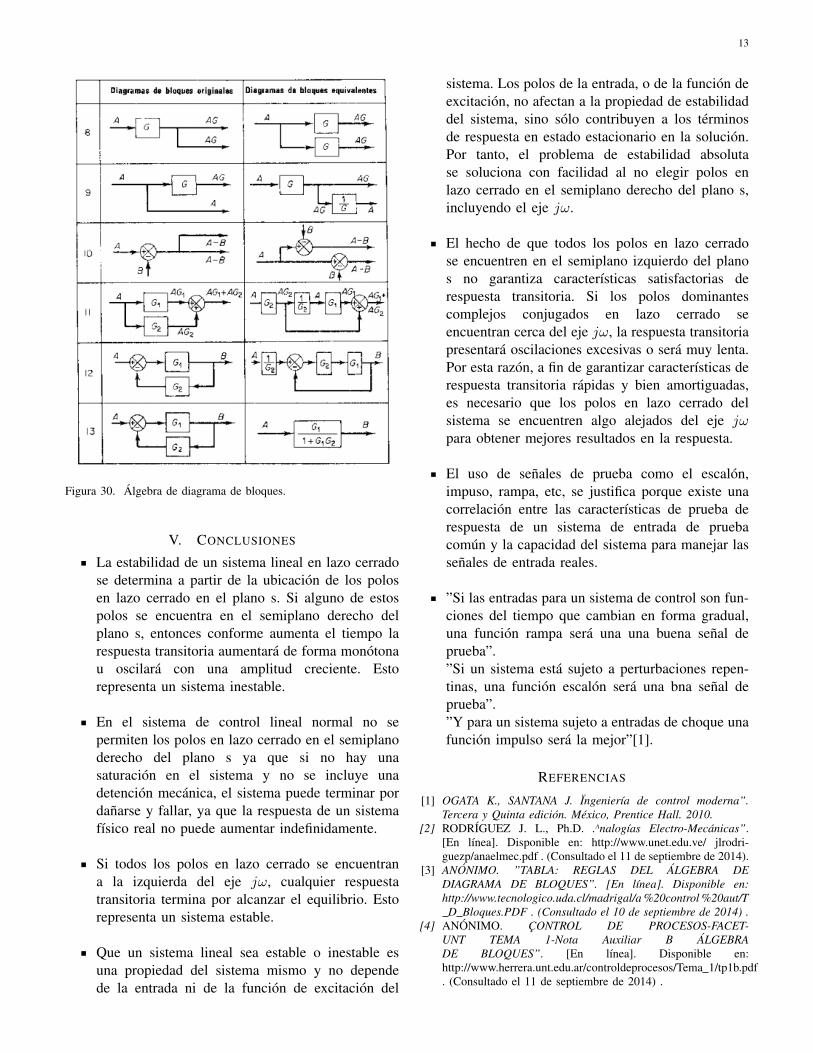
A continuacion se muestra en la figura 30 lasoperaciones que se pueden llevar a cabo para losdiagramas de bloques:
13
Figura 30. Algebra de diagrama de bloques.
V. CONCLUSIONES
La estabilidad de un sistema lineal en lazo cerradose determina a partir de la ubicacion de los polosen lazo cerrado en el plano s. Si alguno de estospolos se encuentra en el semiplano derecho delplano s, entonces conforme aumenta el tiempo larespuesta transitoria aumentara de forma monotonau oscilara con una amplitud creciente. Estorepresenta un sistema inestable.
En el sistema de control lineal normal no sepermiten los polos en lazo cerrado en el semiplanoderecho del plano s ya que si no hay unasaturacion en el sistema y no se incluye unadetencion mecanica, el sistema puede terminar pordanarse y fallar, ya que la respuesta de un sistemafısico real no puede aumentar indefinidamente.
Si todos los polos en lazo cerrado se encuentrana la izquierda del eje jω, cualquier respuestatransitoria termina por alcanzar el equilibrio. Estorepresenta un sistema estable.
Que un sistema lineal sea estable o inestable esuna propiedad del sistema mismo y no dependede la entrada ni de la funcion de excitacion del
sistema. Los polos de la entrada, o de la funcion deexcitacion, no afectan a la propiedad de estabilidaddel sistema, sino solo contribuyen a los terminosde respuesta en estado estacionario en la solucion.Por tanto, el problema de estabilidad absolutase soluciona con facilidad al no elegir polos enlazo cerrado en el semiplano derecho del plano s,incluyendo el eje jω.
El hecho de que todos los polos en lazo cerradose encuentren en el semiplano izquierdo del planos no garantiza caracterısticas satisfactorias derespuesta transitoria. Si los polos dominantescomplejos conjugados en lazo cerrado seencuentran cerca del eje jω, la respuesta transitoriapresentara oscilaciones excesivas o sera muy lenta.Por esta razon, a fin de garantizar caracterısticas derespuesta transitoria rapidas y bien amortiguadas,es necesario que los polos en lazo cerrado delsistema se encuentren algo alejados del eje jωpara obtener mejores resultados en la respuesta.
El uso de senales de prueba como el escalon,impuso, rampa, etc, se justifica porque existe unacorrelacion entre las caracterısticas de prueba derespuesta de un sistema de entrada de pruebacomun y la capacidad del sistema para manejar lassenales de entrada reales.
”Si las entradas para un sistema de control son fun-ciones del tiempo que cambian en forma gradual,una funcion rampa sera una una buena senal deprueba”.”Si un sistema esta sujeto a perturbaciones repen-tinas, una funcion escalon sera una bna senal deprueba”.”Y para un sistema sujeto a entradas de choque unafuncion impulso sera la mejor”[1].
REFERENCIAS
[1] OGATA K., SANTANA J. Ingenierıa de control moderna”.Tercera y Quinta edicion. Mexico, Prentice Hall. 2010.
[2] RODRIGUEZ J. L., Ph.D. .Analogıas Electro-Mecanicas”.[En lınea]. Disponible en: http://www.unet.edu.ve/ jlrodri-guezp/anaelmec.pdf . (Consultado el 11 de septiembre de 2014).
[3] ANONIMO. ”TABLA: REGLAS DEL ALGEBRA DEDIAGRAMA DE BLOQUES”. [En lınea]. Disponible en:http://www.tecnologico.uda.cl/madrigal/a %20control %20aut/T
D Bloques.PDF . (Consultado el 10 de septiembre de 2014) .[4] ANONIMO. CONTROL DE PROCESOS-FACET-
UNT TEMA 1-Nota Auxiliar B ALGEBRADE BLOQUES”. [En lınea]. Disponible en:http://www.herrera.unt.edu.ar/controldeprocesos/Tema 1/tp1b.pdf. (Consultado el 11 de septiembre de 2014) .


















