8.Cinematica Directa de Robots Industriales
42
Cinemática de Robots Industriales Robótica Móvil e Industrial
-
Upload
estrella-uno -
Category
Documents
-
view
150 -
download
8
Transcript of 8.Cinematica Directa de Robots Industriales

Cinemática de Robots IndustrialesRobótica Móvil e Industrial

Cinemática de los Manipuladores
� La cinemática del robot estudia el movimiento del mismo con respecto a unsistema de referencia.
� Así, la cinemática se interesa por la descripción analítica del movimiento espacial delrobot como una función del tiempo, y en particular por las relaciones entre laposición y la orientación del extremo final del robot con los valores que toman suscoordenadas articulares.
� Existen dos problemas fundamentales pararesolver la cinemática del robot:
� Problema cinemático directo: consiste endeterminar cual es la posición y orientación delextremo final del robot, con respecto a unsistema de coordenadas que se toma comoreferencia, conocidos los valores de lasarticulaciones y los parámetros geométricos delos elementos del robot
� Problema cinemático inverso: resuelve laconfiguración que debe adoptar el robot parauna posición y orientación del extremoconocidas.

Parámetros Eslabón (D-H)
� Denavit - Hartenberg propusieron en 1955 unmétodo matricial que permite establecer demanera sistemática un sistema de coordenadas(Si) ligado a cada eslabón i de una cadenaarticulada, pudiéndose determinar a continuaciónlas ecuaciones cinemáticas de la cadena completa.
� Según la representación D-H, escogiendoadecuadamente los sistemas de coordenadasasociados para cada eslabón, será posible pasar deuno al siguiente mediante 4 transformacionesbásicas que dependen exclusivamente de lascaracterísticas geométricas del eslabón.
� Permite referir las coordenadas del efector final(herramienta o mano) del robot con respecto aun sistema de coordenadas inercial fijo en la base delrobot.
� Estas transformaciones básicas consisten en una sucesión de rotaciones y traslaciones que permitan relacionar el sistema de referencia del elemento i con el sistema del elemento i-1.

Parámetros Eslabón (D-H)
� Las rotaciones y traslaciones en cuestión son las siguientes:
� 1. Traslación del origen Oi-1 a lo largo de Zi-1 una distancia di hasta que coincida con Oi.
� 2. Rotación del eje Xi-1 alrededor del eje Zi-1 un ángulo θi hasta q coincida con la dirección Xi.
� 3. Traslación del origen Oi-1 a lo largo de Xi-1 (que ahora coincide con en dirección con Xi) una distancia ai (Esto hace que los orígenes de los dos sistemas coincidan).
� 4. Rotación del eje Zi-1 alrededor del eje Xi-1, un ángulo αi, ahora los dos sistemas están en coincidencia.

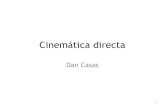
Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Ejes coordenados de las articulaciones i e i+1.
Xi
Zi
Yi
Xi-1
Zi-1
Yi-1

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Ubicación del sistema de ejes coordenados de la muñeca con respecto al sistema dela base del robot.
Xi-1
Zi-1
Yi-1
Xi
Zi
Yi

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Desplazamiento en dirección del eje Zi-1 una distancia di.
Xi
Zi
Yi
XiZi
Yi

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Rotación con respecto al eje Zi-1 un ángulo θi. Considere la regla de la manoderecha para saber el signo de este ángulo.
Xi
ZiYi
Xi
Zi
Yi
Eje +
θ +

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Desplazamiento a lo largo del eje Xi una distancia ai.
Xi
Zi
Yi
Xi
Zi
Yi

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Rotación con respecto al eje Xi un ángulo αi. Considere la regla de la mano derechapara saber el signo de este ángulo.
Xi
Zi
YiXi
Zi
Yi
Eje +
θ +

Parámetros Eslabón (D-H)� Vista gráfica de los parámetros eslabón.
� Parámetros Eslabón Listos.
Xi-1
Zi-1
Yi-1
Xi
Zi
Yi

Parámetros Eslabón (D-H)
� Creación de matrices de transformación:
1 0 0 0
0 1 0 0
0 0 1 di
0 0 0 1
cosθi -senθi 0 0
senθi cosθi 0 0
0 0 1 0
0 0 0 1
1 0 0 0
0 cosαi -senαi 0
0 senαi cosαi 0
0 0 0 1
1 0 0 ai
0 1 0 0
0 0 1 0
0 0 0 1
i-1Ai =
cosθi -cosαi senθi senαi senθi ai cosθi
senθi cosαi cosθi -senαi cosθi ai senθi
0 senαi cosαi di
0 0 0 1
i-1Ai =
i-1Ai = Rzi-1,θi x Tzi-1,di x Txi,ai x Rxi,αi
� Donde di, θi, ai y αi son los parámetros eslabón para la articulación i.
Matriz de transformación
de un sistema final al sistema
base.

Parámetros Eslabón (D-H)
� θθθθi: Es el ángulo que forman los ejes Xi-1 y Xi medido en un plano perpendicular al eje Zi-1, utilizando la regla de la mano derecha. Se trata de un parámetro variable enarticulaciones giratorias.
� di: Es la distancia a lo largo del eje Zi-1 desde el origen del sistema de coordenadas {Si-1}hasta la intersección del eje Zi-1 con el eje Xi. Se trata de un parámetro variable enarticulaciones prismáticas.
� ai: Es la distancia a lo largo del eje Xi que va desde la intersección del eje Zi-1 con el ejeXi hasta el origen del sistema i-esimo, en el caso de articulaciones giratorias. En el caso dearticulaciones prismáticas, se calcula como la distancia mas corta entre los ejes Zi-1 y Zi.
� ααααi: Es el ángulo de separación del eje Zi-1 y el eje Zi, medido en un plano perpendicular aleje Xi, utilizando la regla de la mano derecha.

Procedimiento de asignación de variables D-H.
DH1
Numerar los eslabones comenzando con 1 (primer eslabón móvil
de la cadena) y acabando con n (último eslabón móvil). Se
numerara como eslabón 0 a la base fija del robot.
DH2Numerar cada articulación comenzando por 1 (la
correspondiente al primer grado de libertad y acabando en n).
DH3
Localizar el eje de cada articulación. Si esta es rotativa, el eje será
su propio eje de giro. Si es prismática, será el eje a lo largo del
cual se produce el desplazamiento.
DH4Para i de 0 a n-1, situar el eje Zi, sobre el eje de la articulación
i+1.
DH5
Situar el origen del sistema de la base (S0) en cualquier punto del
eje Z0. Los ejes X0 e Y0 se situarán a través de la regla de la
mano derecha con Z0.
DH6
Para i de 1 a n-1, situar el sistema (Si) (solidario al eslabón i) en la
intersección del eje Zi con la línea normal común a Zi-1 y Zi. Si
ambos ejes se cortasen se situaría (Si) en el punto de corte. Si
fuesen paralelos (Si) se situaría en la articulación i+1.
DH7 Situar Xi en la línea normal común a Zi-1 y Zi.
DH8 Situar Yi de modo con la regla de la mano derecha con Xi y Zi.
DH9Situar el sistema (Sn) en el extremo del robot de modo que Zn
coincida con la dirección de Zn-1 y Xn sea normal a Zn-1 y Zn.

Procedimiento de asignación de variables D-H.
DH10Obtener Øi como el ángulo que hay que girar en torno a Zi-1
para que Xi-1 y Xi queden paralelos.
DH11
Obtener di como la distancia, medida a lo largo de Zi-1, que
habría que desplazar (Si-1) para que Xi y Xi-1 quedasen
alineados.
DH12
Obtener ai como la distancia medida a lo largo de Xi (que ahora
coincidiría con Xi-1) que habría que desplazar el nuevo (Si-1)
para que su origen coincidiese con (Si).
DH13
Obtener ai como el ángulo que habría que girar entorno a Xi
(que ahora coincidiría con Xi-1), para que el nuevo (Si-1)
coincidiese totalmente con (Si).
DH14 Obtener las matrices de transformación i-1Ai.
DH15Obtener la matriz de transformación que relaciona el sistema de
la base con el del extremo del robot T = 0Ai, 1A2... n-1An.
DH16
La matriz T define la orientación (submatriz de rotación) y
posición (submatriz de traslación) del extremo referido ala base
en función de las n coordenadas articulares.

Procedimiento de asignación de variables D-H.

Parámetros Eslabón (D-H)Ejemplo#1� Brazo robot plano.
� Articulaciones rotatorias y movimiento en un solo plano.

Tips para análisis
� Las coordenadas del extremo final de un robotdependen de la ubicación de la posición casa(home position), la cual es el punto de reposo uorigen del robot que corresponde a valoresangulares de 0.
� Representación esquemática dearticulaciones:
ArticulacionesPrismáticas
ArticulacionesRotativas

Parámetros Eslabón (D-H)Ejemplo#2� Robot Cilíndrico
d1 Y0
X0
Z0

Parámetros Eslabón (D-H)Ejemplo#3� Robot SCARA
a1
a2
d1
d1
+
+
+
X0
Y0
Z0

Parámetros Eslabón (D-H)Ejemplo#3� Robot SCARA

Parámetros Eslabón (D-H)Ejemplo#4� Herramienta esférica.
Grados de libertad de la muñeca: • giro (hand rotate)• elevación (wrist flex) • desviación (wrist rotate)

Parámetros Eslabón (D-H)Ejemplo#4� Herramienta esférica.
d6
z6
y6

Parámetros Eslabón (D-H)Ejemplo#5

Parámetros Eslabón (D-H)Ejemplo#5
Articulación a α d θ
1 0 0 L1 θ1
2 0 90 d2 90
3 0 0 d3 0
4 0 0 L4 θ4

Parámetros Eslabón (D-H)Ejemplo#5� Cálculo de las matrices de transformación por articulación:
� Cálculo de matriz de transformación total:

Parámetros Eslabón (D-H)Ejemplo#6
� Robot IRB6400C

Parámetros Eslabón (D-H)Ejemplo#6
Z1
Z0
Z6
Z0
Y1 Y0
X4
X0
Z2
Z3
Z4
Z5
X1
X2Y2
X3
Y6
X6
a α d θ
1 0 -90 0 θ1
2 0 90 L1 θ2
3 -L2 90 0 Θ3-90
4 0 -90 L3 θ4
5 0 90 0 θ5
6 0 0 L4 θ6
Y3 Z5
X5
L1
L2
L3
L4
θ1
θ3
θ4
θ5
θ6θ2
Y5

Parámetros Eslabón (D-H)Ejemplo#6� Cálculo de matrices de transformación por articulación:

Parámetros Eslabón (D-H)Ejemplo#6

Parámetros Eslabón (D-H)Ejemplo#7� Robot RV-2JA de Mitsubishi
� 5 grados de libertad
Z1
Z2
Z3
Z4
Z5
a α d θ
1 0 -90 300 θ1
2 250 0 0 θ2
3 160 0 0 θ3
4 0 90 0 θ4
5 0 0 72 θ5
Z0
Y0
X1
Y1
X4
X5
Y5
X2
Y2
X0
X3
Y3
Y4
J4
J5
300
250
160
72
� La imagen mostrada indica la posición casa (home position).

Parámetros Eslabón (D-H)Ejemplo#6� Cálculo de matrices de transformación por articulación:
0A1 =
Cθ1 0 -Sθ1 0
Sθ1 0 Cθ1 0
0 -1 0 300
0 0 0 1
1A2 =
Cθ2 - Sθ2 0 250Cθ2
Sθ2 Cθ2 0 250Sθ2
0 0 1 0
0 0 0 1
2A3 =
Cθ3 - Sθ3 0 160Cθ2
Sθ3 Cθ3 0 160Sθ2
0 0 1 0
0 0 0 1
3A4 =
Cθ4 0 Sθ4 0
Sθ4 0 –Cθ4 0
0 1 0 0
0 0 0 1
4A5 =
Cθ5 -Sθ5 0 0
Sθ5 Cθ5 0 0
0 0 1 72
0 0 0 10T5 = A1*A2*A3*A4*A5

Parámetros Eslabón (D-H)Ejemplo#7
� Robot KUKA KR16

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Parámetros Eslabón (D-H)Ejemplo#7

Trabajo de Investigación
� Investigación:
� Seleccionar un robot manipulador de alguna marca determinada(Kuka, Mitsubishi, Epson, etc.), obtener los planos constructivos con dimensiones, observar las características de movimiento (grados de libertad, tipos de articulaciones, etc.), realizar el análisis cinemático directo con los parámetros D-H dando valores reales.
� Obtener la matriz total de transformación basado en los parámetros D-H.