Modelado de Sistemas. Linealización
17
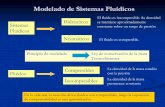
MODELADO MATEMÁTICO DE SISTEMAS DE CONTROL 1. CONCEPTO DE MODELO MATEMÁTICO Se llama modelo matemático de un sistema dinámico a un conjunto de ecuaciones que representan la dinámica del sistema con bastante precisión. Un sistema dinámico determinado no tiene porque tener solo un modelo matemático. La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos, etc., se describe en términos de ecuaciones diferenciales. Dichas ecuaciones diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado: Leyes de Newton -> Sistemas Mecánicos Leyes de Kirchhoff -> Sistemas Eléctricos Principio de Causalidad Vamos a suponer para todos los sistemas el principio de Causalidad. Esto quiere decir que la salida actual del sistema (la salida en t = 0) depende de las entradas pasadas (entradas en t < 0) pero no depende de las entradas futuras (entradas para t > 0). Sistemas Lineales Un sistema se denomina lineal si se aplica el principio de superposición. Este principio establece que la respuesta producida por la aplicación simultánea de dos funciones de entrada diferentes es la suma de las dos respuestas individuales. Por tanto, para el sistema lineal, la respuesta a varias entradas se calcula tratando una entrada cada vez y sumando los resultados. Que un sistema sea lineal o no depende del tipo de ecuación matemática que rija el comportamiento del sistema
description
Explicación sobre el modelado de sistemas dinámicos desde el punto de vista de la Regulación Automática.
Transcript of Modelado de Sistemas. Linealización

MODELADO MATEMÁTICO DE SISTEMAS DE CONTROL
1. CONCEPTO DE MODELO MATEMÁTICO
Se llama modelo matemático de un sistema dinámico a un conjunto de ecuaciones que representan la dinámica del sistema con bastante precisión. Un sistema dinámico determinado no tiene porque tener solo un modelo matemático.
La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos, etc., se describe en términos de ecuaciones diferenciales. Dichas ecuaciones diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado:
Leyes de Newton -> Sistemas Mecánicos
Leyes de Kirchhoff -> Sistemas Eléctricos
Principio de Causalidad
Vamos a suponer para todos los sistemas el principio de Causalidad. Esto quiere decir que la salida actual del sistema (la salida en t = 0) depende de las entradas pasadas (entradas en t < 0) pero no depende de las entradas futuras (entradas para t > 0).
Sistemas Lineales
Un sistema se denomina lineal si se aplica el principio de superposición. Este principio establece que la respuesta producida por la aplicación simultánea de dos funciones de entrada diferentes es la suma de las dos respuestas individuales. Por tanto, para el sistema lineal, la respuesta a varias entradas se calcula tratando una entrada cada vez y sumando los resultados.
Que un sistema sea lineal o no depende del tipo de ecuación matemática que rija el comportamiento del sistema
2. MODELADO DE SISTEMAS ELÉCTRICOS
Las leyes fundamentales que gobiernan los circuitos eléctricos son las leyes de corrientes y voltajes de Kirchhoff:
Ley de Corrientes [Ley de Nodos]
En cualquier nodo, la suma de las corrientes que entran en ese nodo es igual a la suma de las corrientes que salen. De forma equivalente, la suma de todas las corrientes que pasan por el nodo es igual a cero

Ley de Voltajes [Ley de Mallas]
En un lazo cerrado, la suma de todas las caídas de tensión es igual a la tensión total suministrada. De forma equivalente, la suma algebraica de las diferencias de potencial eléctrico en un lazo es igual a cero.
Un modelo matemático de un circuito eléctrico se obtiene aplicando una o ambas leyes de Kirchhoff.
Ecuación de Comportamiento y Transformada de Componentes básicos de un Circuito Eléctrico
2.1 AMPLIFICADORES OPERACIONALES
Los amplificadores operacionales se utilizan para amplificar las señales de los circuitos sensores. También se utilizan a menudo en los filtros que sirven para compensación.
La entrada e1 hacia el terminal negativo del amplificador está invertida y la entrada e2 hacia el terminal positiva no lo está. Por consiguiente, la entrada total al amplificador se convierte en e2 - e1.

Obsérvese que el amp op amplifica la diferencia entre los voltajes e1 y e2. Tal amplificador se denomina amplificador diferencial. Como la ganancia del amp op es muy alta, es necesario tener una realimentación negativa de la salida hacia la entrada para hacer estable el amplificador. (La realimentación se lleva a cabo de la salida hacia la entrada inversora para que la realimentación sea negativa.).
Amplificadores operacionales más comunes:
NOTA: el potenciómetro puede ser lineal o angular.

3. MODELADO DE SISTEMAS MECÁNICOS
La ley fundamental que controla los sistemas mecánicos es la segunda Ley de Newton. Esta ley permite describir los fenómenos asociados con el movimiento de los cuerpos.
Si dinámica del sistema mecánico es traslacional se cumple que:
La fuerza neta que actúa sobre un cuerpo es igual a la variación temporal del momento lineal de dicho cuerpo.
Ecuación de Comportamiento y Transformada de Elementos Mecánicos Traslacionales
Cuando sobre un cuerpo actúa una fuerza este se deforma. Esta deformación que experimenta el cuerpo es debido a la elasticidad del mismo. Para tener en cuenta esta deformación del cuerpo debido a la fuerza aplicada sobre el mismo se utiliza en el modelo un resorte.
Además, el movimiento de todo cuerpo se ve afectado por el rozamiento, o fenómenos de fricción, que tiende a disminuir la energía cinética del mismo. Esto es tiende a frenar el movimiento.
Cuando el sistema dinámico está formado por más de un elemento, interactuando estos entre sí, se obtiene que:

Es decir, el sumatorio de todas las fuerzas que actúan sobre el cuerpo es igual al sumatorio de las impedancias que el entorno ocasiona al cuerpo multiplicado por el efecto que ocasiona sobre el mismo, menos, el sumatorio de las impedancias que los cuerpos con los que interacciona le provocan multiplicado por el efecto que ocasiona sobre el mismo.
Ecuación de Comportamiento y Transformada de Elementos Mecánicos Rotacionales
Si dinámica del sistema mecánico es rotacional se cumple que:
como la velocidad lineal está relacionada con la velocidad angular mediante la expresión:
v = ω · r
se nos queda que:
El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. Desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme.
Dado un sistema de partículas y un eje arbitrario, el momento de inercia del mismo se define como la suma de los productos de las masas de las partículas por el cuadrado de la distancia r de cada partícula a dicho eje. Matemáticamente se expresa como:
Por tanto, la segunda Ley de Newton aplicada a sistemas rotacionales se nos queda como:

De forma análoga, en los sistemas mecánicos rotacionales también habrán fenómenos elásticos y de fricción.
Cuando el sistema dinámico está formado por más de un elemento, interactuando estos entre sí, se obtiene que:
Es decir, el sumatorio de todos los momentos que actúan sobre el cuerpo es igual al sumatorio de las impedancias que el entorno ocasiona al cuerpo multiplicado por el efecto que ocasiona sobre el mismo, menos, el sumatorio de las impedancias que los cuerpos con los que interacciona le provocan multiplicado por el efecto que ocasiona sobre el mismo.

Ecuación de Comportamiento y Transformada de Trenes de Engranajes
Los trenes de engranajes son dispositivos mecánicos que transmiten energía desde una parte del sistema a otra transformando la fuerza, par, velocidad y el desplazamiento.
Despreciando la inercia y la fricción de los engranajes (caso ideal), se cumple que:
1. El número de dientes es proporcional a los radios.
r1 / r2 = N1 / N2
2. La longitud de arco que describe un engranaje en su movimiento es igual a la longitud de arco que describe la rueda con la que engrana.
θ1 · r1 = θ2 · r2
3. El trabajo realizado por un engranaje es igual al trabajo realizado por el otro.
T1 · r1 = T2 · r2
Esta impedancia está relacionada con el arrastre de carga que posee el sistema rotacional aguas abajo de la reducción.

3.1 MODELADO DE SISTEMAS ELECTRO – MECÁNICOS
Normalmente, en los motores de inducción, Ra >> La, por lo que no es un erro despreciar La

4. LINEALIZACIÓN DE MODELOS MATEMÁTICOS NO LINEALES.
Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada entrada a la vez y sumando los resultados.
Aunque muchas relaciones físicas se presentan a menudo mediante ecuaciones lineales, en la mayor parte de los casos las relaciones reales no son lineales.
En la ingeniería de control, una operación normal del sistema (estado de funcionamiento) puede ocurrir alrededor de un punto de equilibrio y las señales involucradas son pequeñas alrededor del punto. (Punto A).
En estos casos es posible aproximar el sistema no lineal mediante un sistema lineal dentro de un rango de operación limitado.
Funciones no lineales más frecuentes:
Funciones elevadas al cuadrado Funciones seno, coseno, tangente Funciones logaritmo, exponenciales Producto de dos variables
El procedimiento de linealización se basa en el desarrollo de la función no lineal en series de Taylor alrededor del punto de operación y la retención sólo del término lineal. Debido a que no se consideran los términos de orden superior del desarrollo en serie de Taylor, estos términos no considerados deben ser suficientemente pequeños; es decir, las variables solo se desvían ligeramente de la condición de operación.
La serie de Taylor de una función f real o compleja ƒ(x) infinitamente diferenciable en el entorno de un número real o complejo a es la siguiente serie de potencias:
Cómo sólo nos interesa el término lineal nos quedamos con:
Procedimiento de linealización de funciones no lineales:
1. Calculamos el punto de funcionamiento. En tal punto de equilibrio las variables que definen el comportamiento del sistema no sufren variaciones por lo que sus derivadas se anulan.
2. Desarrollamos en serie de Taylor sólo hasta el término lineal.3. Sustituimos los valores obtenidos para el punto de funcionamiento.

5. DIAGRAMAS DE BLOQUES.
Un diagrama de bloques de un sistema es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de señales.
En un diagrama de bloques todas las variables del sistema se enlazan unas con otras mediante bloques funcionales. El bloque funcional es un símbolo que representa la operación matemática que sobre la señal de entrada hace el bloque para producir la salida. Las funciones de transferencia de los componentes por lo general se introducen en los bloques.
Las señales se representan mediante flechas. La punta de la flecha que señala el bloque indica la entrada, y la punta de flecha que se aleja del bloque representa la salida.
Debe señalarse que, en un diagrama de bloques la principal fuente de energía no se muestra explícitamente.
5.1 Punto Suma y Punto de Ramificación.
Un círculo con una cruz es el símbolo que indica una operación de suma. El signo más o el signo menos en cada punta de flecha indica si la señal debe sumarse o restarse. Es importante que las cantidades que se sumen o resten tengan las mismas dimensiones y las mismas unidades.
Un punto de ramificación es aquel a partir del cual la señal de un bloque va de modo concurrente a otros bloques o puntos de suma.
5.2 Diagrama de Bloques de un Sistema en Lazo Cerrado.
Cualquier sistema de control lineal puede representarse mediante un diagrama de bloques formado por puntos de suma, bloques y puntos de ramificación.
Cuando la salida se realimenta al punto de suma para compararse con la entrada, es necesario convertir la forma de la señal de salida en la de la señal de entrada. Esta conversión se consigue mediante el elemento de realimentación, cuya función de transferencia es H(s).
La función del elemento de realimentación es modificar la salida antes de compararse con la entrada. (En la mayor parte de los casos, el elemento de realimentación es un sensor que mide

la salida de la planta. La salida del sensor se compara con la entrada y se genera la señal de error.).
El cociente de la señal de realimentación B(s) entre la señal de error E(s) se denomina función de transferencia en lazo abierto:
El cociente entre la salida C(s) y la señal de error E(s) se denomina función de transferencia de la trayectoria directa:
Si la función de transferencia de la trayectoria de realimentación H(s) es la unidad, la función de transferencia en lazo abierto y la función de transferencia de la trayectoria directa son iguales.
La función de transferencia que relaciona C(s) con R(s) se denomina función de transferencia en lazo cerrado.
Esta función de transferencia relaciona la dinámica del sistema en lazo cerrado con la dinámica de los elementos de las trayectorias directa y de realimentación. Por tanto, la salida del sistema en lazo cerrado depende claramente tanto de la función de transferencia en lazo cerrado como de la naturaleza de la entrada.
5.3 Sistema de lazo cerrado sujeto a una perturbación.
Cuando se presentan dos entradas (la entra-da de referencia y la perturbación) en un sistema lineal, cada una de ellas puede tratarse de forma independiente; y las salidas correspondientes a cada entrada pueden sumarse para obtener la salida completa.
La respuesta a la aplicación simultánea de la entrada de referencia y la perturbación se obtiene sumando las dos respuestas individuales.

5.3.1 Reducción de un Diagrama de Bloques.
Es importante señalar que los bloques pueden conectarse en serie, sólo si la entrada de un bloque no se ve afectada por el bloque siguiente. Si hay efectos de carga entre los componentes, es necesario combinarlos en un bloque único. Sin embargo, debe señalarse que, conforme se simplifica el diagrama de bloques, las funciones de transferencia de los bloques nuevos se vuelven más complejas, debido a que se generan polos y ceros nuevos.